1,2,3. Maddi nokta. Referans sistemi. Yörünge, yol, hareket. Hız. Yol ve hız formülleri.
Hareketli bir cismin mekanikte en basit ve son derece soyut idealleştirilmesi maddi nokta - karşılık gelen özel görev koşulları altında boyutu ve şekli ihmal edilebilecek bir vücut.
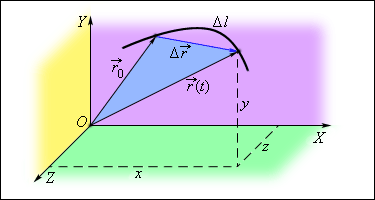
Mekanik hareketin göreceli doğası, onu tanımlarken referans sistemlerinin kullanılmasını gerektirir ve gerektirir. Altında referans sistemi anlamak kökeni bazı referans cisimleriyle ilişkilendirilen koordinat sistemi (genellikle Kartezyen). Referans sisteminin ayrıca cetveller ve saatler, yani uzaysal ve zamansal aralıkları (uzunluklar ve süreler) saymaya yönelik araçlar içerdiği varsayılmaktadır. Bir nokta cismin başlangıç kinematik kesinliği - konumu - kullanılarak belirtilir. yarıçap vektörüR, Koordinat sisteminin başlangıç noktasından hareket eden bir cisme (nokta)) veya x, y, z noktasının koordinatlarını kullanarak skaler olarak. Vektör (Vektör miktarları için semboller, bu metin kalın harflerle.) ve vücut pozisyonunu belirleyen skaler yöntemler birbirine bağlıdır:
R = Ben x + k en + J z, burada x , y, z - noktanın izdüşümleri (uç yarıçapı - vektör R) karşılık gelen koordinat eksenlerine ve Ben, k, j – X, Y, Z eksenlerinin ortları (birim vektörleri) Bir cisim hareket ettiğinde yarıçap vektörünün sonu adı verilen bir çizgiyi tanımlar. yörünge(vücudun hareket ettiği çizgi). Bir noktanın hareketinin yörüngesine ilişkin denklem, koordinatları arasındaki ilişkiyi temsil eder ve düzlemsel (iki boyutlu) hareket için genellikle y = ¦ (x) bağımlılığı ile ifade edilir. Dt zamanına göre cismin konumundaki değişiklik şu şekilde verilir: veya yer değiştirme vektörü D R, vücudun ilk konumundan son konumuna kadar gerçekleştirilir, veya skaler – ile S, - Vücudun yörüngesi boyunca hareketi yönünde ölçülen mesafe.
D R = R – R o, yani yer değiştirme vektörü D R, temsil etmek artış yarıçap - vektör R vücut (son ve başlangıç değerleri arasındaki fark R).
Tipik olarak seyahat modülü ïD Rï noktanın kat ettiği S yolundan daha az Ancak, Dt ® 0, D için. R® D R ve modül |d R| temel (fiziksel olarak sonsuz küçük) yer değiştirme d R yay uzunluğuna, yani dS yoluna yönelir (yörüngenin yay uzunluğu dS, sekant uzunluğu dr ile karşılaştırılır).
Hareket hızı, yani. vücudun konumundaki değişim hızı, geçiş veya hareket hızı, adı verilen bir miktarla karakterize edilir. hız. Ayırt etmek ortalama ve anlık hız, bunlar da yer değiştirme cinsinden ifade edilen skaler (yol cinsinden ifade edilir) ve vektör hızlara bölünür.
Altında ortalama yer hızı anlamak Bir cismin kat ettiği S yolunun tamamının, geçiş süresi t'ye oranıyla ölçülen nicelik:
= S/t, [u] = m/s.
Altında ani hız Zaman aralığını daraltırken ortalama hızın sınırını anlıyorsunuz (Zaman aralığı Dt, yani son t2 (veya basitçe mevcut t) ile ilk t1 (veya t0) anları arasındaki fark, yani Dt = t2 – t1 = t – tо şuna eşit olabilir: şimdiki an t süresi (Dt = t), eğer başlangıç anı tо sıfıra eşit olarak seçilir.) Dt şu anda, bir anda (t = Dt ® 0'da), yani u = lim DS/Dt = dS/dt = S¢.
Biçimsel açıdan bakıldığında, anlık yer hızı u = dS/dt yolun zamana göre türevidir. Fizikte, dS yolunun ve dt zamanının temel (fiziksel olarak sonsuz küçük) artışlarının oranı olarak yorumlanabilir.
Ani vektör hızı sen mükemmel ilişkinin sınırı olarak anlaşıldı
hareketli gövde D R Dt ® 0 olması koşuluyla, Dt oluştuğunda:
sen= lim D R/Dt = d R/dt= R¢ - yarıçap vektörünün zamana göre türevi, aynı zamanda temel (fiziksel olarak sonsuz küçük) yer değiştirmelerin oranı olarak da tanımlanabilir d R ve zaman dt.
Yarıçapla aynı - vektör R, anlık vektör hızı sen yazılabilir
koordinat eksenleri üzerindeki projeksiyonlar aracılığıyla:
sen=d R/dt = d/dt( Ben x + J sen + k z) = Ben× dх/dt + J× gün/dt + k× dz/dt = Ben sen X + J sen en +k sen z
Hızın sayısal değeri (modül) şuna eşittir:
u = Ö(uх2 + uу2 + uz2). Vektörün yönü anlık hız temel yer değiştirme vektörü d'nin yönü ile çakışır R, teğet vektör boyunca yönlendirilmişT vücut hareketi yönünde yörüngeler:
sen=d R/dt Ş sen D R; D r = lim D R Dt ® 0'da.
sen= sen T, Nerede T - birim vektör (ï Tï = 1) vücudun hareket yönünde yönlendirilen yörüngeye (ort) teğet.
Anlık yer hızı u = dS/dt, anlık vektör hızı ï'nin sayısal değerine (modül) eşittir senï = id R/dtï, çünkü Dt ® 0 olduğunda (Dt = dt'de) yörüngenin yay uzunluğu dS, sekantın uzunluğuna doğru yönelir.
Kinematik maddi nokta. Yol, hız, ivme. Teğetsel, normal, tam ivme.
Newton mekaniğinde, (diğer cisimlerin etki etmediği veya eylemlerinin karşılıklı olarak telafi edildiği) serbest bir cismin hareket durumunu koruduğuna, yani sabit bir hızla hareket ettiğine inanılır (belirli bir durumda, dinlenme halindeyken). Diğer cisimler arasındaki etkileşimin varlığı, Galileo-Newton dinamiğinde belirlendiği gibi, hızdaki bir değişiklikle kendini gösterir. verilen vücut. Değişimin hızı vektör miktarı ile karakterize edilir, isminde hızlanma A, anlık vektör hızının türevine sayısal olarak eşittirsenzamana göre:
a = Dt® 0'da lim Du/Dt; a = du/dt = u¢ [a] = m/s2.
Çünkü vektör hızı sen= sen T iki serbestlik derecesine sahiptir - modül u
ve yön (vektörle belirtilir) T)
, o zaman değişimin hızı ivme vektörüdür A- adı verilen iki bileşen şeklinde sunulabilir teğet ( teğet) ve normal(merkezcil) ivmeler:
A=d sen/dt = d/dt(u T) = T(du/dt) + u×d T/dt= A t+ A n, nerede A t = T(du/dt) - teğetsel ivme, Sayısal olarak hız modülünün değişim hızına eşit ve yönde yönlendirilmişT
,
yani, yandaki yörüngeye teğet olarak
vücut hareketleri ne zaman(du/dt) > 0 ve karşı T(du/dt)'de< 0;
A n = u×d T/dt - normal hızlanma , hız yönündeki değişimin hızını karakterize etmek.
Normal ivmenin yörüngenin normali boyunca içbükeyliğine doğru yönlendirildiğini ve sayısal olarak u2/R'ye eşit olduğunu gösterelim; burada R, yörüngenin eğrilik yarıçapı uygun noktada.
Pisagor teoremine göre toplam ivmenin modülü a eşittir:
|A| = a = Ö(аt2 + аn2) = Ö[(du/dt)2 + u4/R2].
Çözüm için bir cismin hareket ettiği ivmeyi bilmek gereklidir. Mekaniğin temel sorunu yani herhangi bir zamanda vücudun hızını ve konumunu belirlemek için. Bunu yapmak için, hız ve ivme ile ilgili denklemlerin yanı sıra vücudun ivmesini içeren yarıçap vektörüne sahip olmak gerekir.
Kinematik hareket denklemleri (hız ve yarıçap vektörü için denklemler).
Bir noktayı taşımak için sabit hızlanma
a = d sen/dt = const, hızı d ilişkisinin integrali alınarak belirlenir sen = A× cevap:
gün sen = ò A× dt Ş sen - sen o = A t Ş sen = sen o + A T
Aynı şekilde hızı bilmek sen=d R/dt, yarıçap vektörünü bul R, vücudun yerini belirler. İlişkinin entegrasyonu d R = sen dt, şunu elde ederiz:
gün R = ò sen dt = ò( sen o + A t)dt Ş R – R o = sen nereden + A t2/2Þ R = R o + sen nereden + A t2/2
Hızlanmanın yanı sıra A mekaniğin ana problemini çözmek, yani hızı belirlemek sen
ve yerler R noktanın başlangıç hareketinin durumu, yani hız değerleri hakkında bilgi gerektirir sen o ve hükümler R o, t = 0 zamanının başlangıç anını işaret eder. Bir cismin ivmesini bulma problemi, kinematik - dinamikten sonraki mekaniğin bölümünde çözülür.
Uygulamada, hız ve yarıçap vektörleri için elde edilen vektör denklemleri genellikle skaler form, yani koordinat eksenleri üzerindeki projeksiyonlar şeklinde: x = xo + uохt + ахt2/2; y = yо + uоуt + ауt2/2; z = zо + uоzt + аzt2/2;
Doğrusal tek boyutlu harekette şunu yazabiliriz: aşağıdaki formüller hız ve yol için:
u = uо + аt ve S = uоt + аt2/2, burada tek yönlü harekette S yolu modüle eşit Vücudun son ve başlangıç konumlarının koordinatları arasındaki fark.
5.6. Kesinlikle sağlam. Kesinlikle katı bir cismin hareket türleri. Dönme hareketinin kinematiği. Açısal hız. Açısal ivme. Hareketin doğrusal ve açısal özellikleri arasındaki ilişki.
Hareket eden bir cismin boyutunun ve şeklinin ihmal edilemeyeceği durumlarda genellikle simüle edilebilir. katı gövde – aralarında sabit mesafeler bulunan bir dizi maddi nokta. Bu durumda, böyle bir cismin keyfi hareketi genellikle öteleme ve dönme gibi daha basit, bağımsız hareketlere ayrıştırılabilir.
Altında ileri hareket katı cisimler bunu anlar Vücutta çizilen herhangi bir düz çizginin hareketi sırasında kendisine paralel kalması hareketi (Çeviri, her şeyden önce doğrusal harekettir ve bu tür eğrisel hareketler, dönme dolabın kabinindeki harekettir...). Öteleme hareketi sırasında vücudun tüm noktalarının hareket etmesi önemlidir.
eşdeğer, yani aynı anlık hız ve ivmelere sahip aynı yörüngeler boyunca.
 Bu nedenle, katı bir cismin öteleme hareketinin mekaniği bir bütün olarak bir noktanın mekaniğinden herhangi bir temel farklılık içermez ve esasen ona indirgenir. Katı bir cismin seçilmiş belirli bir noktası olarak atalet merkezi olarak da adlandırılan kütle merkezi seçilir.
Bu nedenle, katı bir cismin öteleme hareketinin mekaniği bir bütün olarak bir noktanın mekaniğinden herhangi bir temel farklılık içermez ve esasen ona indirgenir. Katı bir cismin seçilmiş belirli bir noktası olarak atalet merkezi olarak da adlandırılan kütle merkezi seçilir.
Dönme hareketinde durum farklıdır. En basit şekli Sabit bir eksen etrafında dönme.İçinde vücudun tüm noktaları birlikte hareket eder merkezleri uzanan daireler
dönme ekseni adı verilen tek bir düz çizgi üzerinde Scheniya. Dönme hareketinde farklı noktalar cisimler (dönme ekseninden farklı mesafelerde) aynı anda Dt farklı doğrusal hareketler Dr yapar ve buna göre farklı doğrusal hızlar ve ivmeler. Tüm noktalar için aynı bir cismin ekseni etrafında dönmek doğrusal değil açısal kinematik özellikler olacak(hız ve yol, hareket). Bir bütün olarak vücudun dönme hareketinin yeterli (ve kullanışlı) özellikleri olacaktır. Sabit bir eksen etrafında dönen bir cismin bir serbestlik derecesi vardır. Doğrusal hareketDR(veya dr), R'nin dönme eksenine olan mesafesiyle orantılıdır. Açısal yer değiştirme Dj (veya dj), doğrusal Dr bölü R yarıçapına eşittir karşılık gelen daire yani dj = dr/R, R'ye bağlı değildir.
Buna göre hız w = dj/dt [rad/s = s-1] açısal hareket(veya j dönme açısındaki değişiklikler), denir açısal hız, Ve değişimin hızı e = dw/dt [rad/s2 = s-2], denir açısal ivme, dairenin yarıçapına bağlı değildir, yani dönen gövdenin tüm noktaları için aynıdırlar.
R yarıçaplı bir daire içinde dönen bir noktanın doğrusal ve açısal özellikleri birbirine bağlıdır aşağıdaki gibi:
w= dj/dt = (dr/R)/dt = u/R; Ş u = wR.
e = dw/dt = d/dt(u/R) = (1/R)du/dt = аt/R Þ аt = eR
аn = u2/R = (wR)2/R = w2R;
a = Ö(аt2 + аn2) = Ö(e2R2 + w4R2) = [Ö(e2 + w4)]/R.
dr = Rdj = rsin q×dj olduğundan, o zaman vektör formu D R= . Ortaya çıkan eşitliği dt'ye bölerek şunu elde ederiz: d R/dt= sen = = [w, R] Þ sen = [w, R].
A=d sen/dt = d/dt[ w, R] = + [w, D R/dt] = [ e, R] + [w, sen] = A t + [ w, [w, R]] =A t+ A n, nerede
A t = [ e, R] Ve A N = [w, [w, R]] = - w2 R.
Vektörlerin yönü d J Ve w sap gövdenin dönme yönünde döndüğünde öteleme hareketine denk gelen sağ vidanın (gimlet) kuralı ile belirlenir.
Açısal ivme e=d w/dt temel artış d ile aynı doğrultudadır w açısal hız: e D w. Böylece o yöne yönlendirilir w hızlandırılmış
(dw/dt > 0) dönüş ve yönün tersine w yavaş hızda (dw/dt< 0) вращении.
Vektör karakteri w Ve e sadece dönme hızını değil, aynı zamanda dönme ekseninin uzaydaki yönünü ve dönme yönünü de onların yardımıyla karakterize etmeyi mümkün kılar.
Açısal için doğrusal olanla aynı kinematik özellikler Benzer denklemler sabit ivmeli dönüşteki hız ve yer değiştirme için de geçerlidir:
w = wо ± et ve j = jo + wоt ± et2/2, burada artı işareti hızlandırılmış dönüş içindir ve eksi işareti yavaş dönüş içindir.
Tıpkı öteleme hareketinde olduğu gibi, çözmek için dönme hareketi mekaniğinin ana görevi (herhangi bir zamanda açısal hızı ve konumu belirlemek) hareketin başlangıç durumunu (jo ve wо özellikleri) ve ayrıca bilmek gereklidir açısal ivme e. Hareketli bir cismin ivmesinin belirlenmesi problemi, mekaniğin kinematiği takip eden, dinamik adı verilen bölümünde çözülmektedir. İÇİNDE pratik problemler ah dönme hareketinin analizi için sıklıkla böyle kullanırlar
açık bir ilişki ile j açısal yolu ile ilişkili N devir sayısı olarak karakteristiktir
N = j/2p ve dönüş hızı n = dN/dt veya düzgün dönüş için n = N/t:
n = (dj/dt)/2p = w/2p Þ w = 2pn; j = 2pN.
Bir devir süresine T = 1/n dönme periyodu denir: w = 2p/T veya T = 2p/w.
7,8,9. Maddi bir noktanın dinamiği. Ağırlık. Kuvvet. Momentum (hareket miktarı).
Newton'un ilk yasası, şunu iddia ediyor özgür
Hareket eden bir cisim, yani diğer cisimler tarafından etkilenmeyen (ya da onların hareketleri karşılıklı olarak telafi edilen) bir cisim, bazı referans çerçevelerine göre sabit bir hızla hareket eder (bazen ataletle hareket ettiğini söylerler). Newton'un birinci yasası belirli bir sınıfı tanımlar referans sistemleri, isminde eylemsizlik, V kimin hareketi serbest vücut en basit forma sahiptir (tekdüze ve doğrusal olarak oluşur), belirli bir durumda – dinlenme halinde),
ve burada yalnızca Newton mekaniği doğrudur. Bazen bir ifade olarak formüle edilir
eylemsiz referans sistemlerinin (IRS) varlığı hakkında. En az bir ISO biliniyorsa, tüm ISO'lar ona göre hareket eder. sabit hız, aynı zamanda eylemsiz olacaktır.
Genellikle Dünya ile ilişkili referans sistemi ISO olarak seçilir - yermerkezli referans sistemi. Eylemsizliği yaklaşıktır ve Dünya'nın kendi ekseni etrafında günlük dönüşü nedeniyle bozulur. Daha büyük ölçüde eylemsizliği vardır güneş merkezli CO Güneş ile ilişkilidir. Uygulamada yeterli derecede eylemsizlik vardır laboratuvar Dünyadaki belirli bir bedenle ilişkili bir referans çerçevesi.
Buna göre Galileo'nun görelilik ilkesi, tüm ISO'lar mekanik olguları temsil etmede eşittir, yani tüm ISO'lardaki tüm mekanik yasaları aynı biçime sahiptir ve ISO içinde gerçekleştirilen hiçbir mekanik deney onun hareket ettiğini veya durduğunu tespit edemez.
ISO'da, bir cismin gözlemlenen tüm ivmesi, onu çevreleyen belirli cisimlerin onun üzerindeki etkisiyle açıklanır. Gibi ISO'da cisimlerin hızlanmasına neden olan bu etkinin önlemleri Newton mekaniğinde bir miktar olarak adlandırılan zorla F . Kuvvet F vücudun ISO'ya göre konumunun ve/veya hızının bir vektör fonksiyonudur; yani F = F(R, sen) ve verdiği ivmeyle doğru orantılıdır A vücut: F(R, sen) ~ A veya A ~ F
Bir cisme birden fazla kuvvet etki ediyorsa bunların yerini geometrik bir sonuç alabilir. F S=S F i - kuvvetlerin üst üste binmesi ilkesi (bağımsız dayatma, ekleme).
Aynı kuvvet farklı cisimlere farklı ivmeler kazandırır. Dolayısıyla bir cismin kazandığı ivme yalnızca şunlara bağlı değildir: dış etkiler, aynı zamanda cismin iç özellikleri hakkında da, Newton mekaniğinde ölçüsü kütle olarak adlandırılan bir miktar olarak seçilmiştir (Newton, bir cismin kütlesinden onun yoğunluğu ve hacmiyle orantılı bir miktarı anlamıştır, yani: m = ρV) .) vücudun m'si. Açıkçası, daha büyük kütleye sahip daha büyük cisimlerin aynı etkiler (kuvvetler) altında daha düşük ivmeler kazanması gerekir.
Sonuç olarak ivmeyi kuvvet ve kütle ile aşağıdaki biçimde ilişkilendirebiliriz: A = FS/m ve şunu iddia et hızlanmaA, satın alındı ISO'daki nokta gövdesi, ona etki eden (veya dedikleri gibi, ona uygulanan) ortaya çıkan kuvvetle doğru orantılıdır. FS ve cismin kütlesi m ile ters orantılıdır. Bu ifade, maddi bir noktanın (ve katı bir cismin öteleme hareketinin) dinamiğinin temel yasasını temsil eder - Newton'un ikinci yasası.
Newton mekaniğinde var hareket ölçüleri ve etkileşim arasındaki kesin doğrusal ilişki Laplasyen veya hareketin kesin nedenselliğini ve öngörülebilirliğini yaratan, mekanik determinizm.
Vücudun böylesine dinamik bir özelliği ağırlık, gerçekleştirir, ataletinin, hızdaki değişikliklere, hareket durumundaki değişikliklere karşı inatçılığının bir ölçüsü. Nasıl daha fazla kütle cisim aynı kuvvete maruz kaldığında ivmesi ne kadar az olursa, yani hızı o kadar yavaş değişir. Atalet bir cismin hızının anlık olarak değişmesinin imkansızlığını, bu değişimin zamana yayılmasını, yani vücut hızındaki değişimin yavaşlaması. Bir cismin ataletinin bir ölçüsü olarak kütlenin ölçümü, farklı cisimlerin bir etkiye maruz kaldıklarında elde ettikleri ivmelerin ölçülmesi ve karşılaştırılması yoluyla gerçekleştirilebilir. aynı güç. Kütle standardı olarak cisimlerden birini seçerek diğer cisimlerin kütlelerini onun kütlesi üzerinden ifade edebilirsiniz. Kütle birimi kilogram (kg), SI'nın temel birimidir. Kütle, bir cismin toplamsal bir özelliğidir, yani cisimlerin ve parçacıkların bir koleksiyonunun kütlesi mS, bu cisimlerin (parçacıkların) ayrı ayrı kütlelerinin toplamına eşittir: mS = Smi.
Vektör ölçüsü olarak kuvvet vücutların etkileşimi,
sayısal olarak yarattığı etkiyle ölçülür ürüne eşit ivmelenmesinde vücut kütlesi: F = ma.
SI kuvvet birimi Newton'dur; 1 kg ağırlığındaki bir cisme 1 m/s2'lik ivme kazandıran kuvvettir.
Karar verirken belirli görevler Dinamikte, Newton'un 2. yasası genellikle skaler biçimde, yani karşılık gelen ISO'nun koordinat eksenleri üzerindeki projeksiyonlar biçiminde yazılır:
ax = Fх/m maks = Fх
A = F/m Þ ау = Fу/m veya may = Fу
аz = Fz/m maz = Fz
Bu adaleti varsayar süperpozisyon ilkesi(Eylemin bağımsızlığı ve toplamanın vektör niteliği) kuvvet buna göre ortaya çıkan ivme, cisme ayrı ayrı etki eden kuvvetlerin vücuda verdiği ivmelerin vektör toplamına eşittir.
Newton'un 2. yasası ivmeyi hesaplamanızı sağlar A biliniyorsa m kütleli cisim
ona etki eden kuvvetlerin doğası, yani koordinatlara ve hıza bağımlılıkları.
Bu bağımlılığın niteliğine bağlı olarak çeşitli aşağıdaki türler kuvvet:
- yer çekimi
F= m G- dikey olarak aşağıya doğru yönlendirilir ve vücudun kütlesiyle doğru orantılı olduğundan tüm cisimlere aynı g » 9,8 m/s2 ivmesini (yerçekimi ivmesi) verir; Buradaki m kütlesi artık atıl değil, ağırdır; yerçekiminin bir ölçüsüdür.
- yerçekimi etkileşiminin kuvveti
Fgr = G×m1m2/r2 - iki cismin çekimini belirler
m1 ve m2 kütleleri r mesafesiyle ayrılmış. G katsayısına = 6,67×10-11 N×m2/kg2 – yer çekimi sabiti denir. Buradaki kütle de ağırdır ve yerçekimsel yük görevi görür (kütlenin çifte anlamı eylemsizlik ölçüsü ve yerçekimi ölçüsüdür).
- elastik kuvvet
F y = - k X, Nerede X elastik bir cismin doğrusal deformasyon vektörüdür (deforme olmamış denge değerine göre uzunluk artış vektörü) ve k, esneklik katsayısı veya bir yaya uygulandığında yayın sertliğidir.
- viskoz sürükleme kuvveti
F= - r× sen, Nerede sen- viskoz bir ortamda vücut hızı, r - bir ortamın direnç katsayısı (genellikle sıvı veya gaz).
Yukarıda belirtilen kuvvetlere ek olarak büyük değer Mekanik problemlerin çözümünde vücut ağırlığı ve sürtünme kuvveti gibi koordinatlar veya hızlarla açık bir ifadeye sahip olmayan kuvvetler vardır:
- vücut ağırlığı R bir cismin bir süspansiyon veya destek üzerinde hareket ettiği kuvveti çağırın;
- kayma sürtünme kuvveti Ftr, normal basıncın Fnd kuvvetiyle doğrudan orantılı bir kuvvet olarak adlandırılır (Genellikle destek reaksiyonunun sayısal olarak eşit kuvveti N ile değiştirilir, yani Ftr = μN.), yani vücut ağırlığının yüzeye normal bileşeni desteğin: Ftr = mFnd, burada m - gövdenin yüzeydeki kayma sürtünme katsayısı. Kayma sürtünme kuvveti gövdenin hareketine karşı yönlendirilir ve destek reaksiyon kuvvetinin bir bileşenidir.
Tarihsel olarak, Newton'un 2. yasasının orijinal (Newtoncu) formülasyonu şu şekildeydi: F=d R/dt, nerede R= m sen - vücut dürtüsü. Newton'un ikinci yasasını yazmanın bu şekli daha geneldir ve daha önce bilinenlere indirgenir. F= m AŞu şartla ki, cismin kütlesi m, hareketinin hızından u bağımsızdır. F=d R/dt = d(m sen)/dt = m×d sen/dt = m A.
Newton'un üçüncü yasası iki maddi nokta arasındaki etkileşim kuvvetlerinin olduğunu belirtir. eylemsizlik sistemi referans: modül olarak eşit;
ters yönde; ve noktaları birleştiren düz bir çizgi boyunca hareket edin
F 12 = - F 21
F 12 - ikinci gövdeden birinci gövdeye etki eden kuvvet; F 21 - birinci gövdeden ikinci gövdeye etki eden kuvvet. Bu yasa, Newton'un ilk iki yasasıyla birlikte bir noktanın dinamiğinden dinamiğine geçişi sağlar. sistemler puan.
10. Maddi noktalar sistemi. Dış ve iç kuvvetler. Maddi noktalar sisteminin momentumu. Momentumun korunumu kanunu.
En basit kapalı sistemi ele alalım (Kapalı bir sistem, üzerinde hareket edilmeyen cisimlerden oluşan bir sistemdir) dış organlar(kuvvetler) ve vücutları yalnızca iç kuvvetler aracılığıyla birbirleriyle etkileşime giren.) iki maddi noktadan oluşan bir sistem. Kuvvetin momentumun değişim hızı anlamına geldiğine dayanarak Newton'un üçüncü yasası şu şekilde yazılabilir:
D P1/dt = -d P2/dt Ş d P1= - d P2Þd( R 1 + R 2) = 0 Ş R 1 + R 2 = sabit
Ortaya çıkan eşitlik, iki maddi noktadan oluşan, yani yalnızca birbirleriyle etkileşime giren noktalardan oluşan kapalı bir sistemin momentumun korunumu yasasını (LCM) ifade eder. İki cismin toplam (toplam, bileşke) momentumu hareketleri sırasında sabit kalır ve yalnızca hareketleri sırasında aralarında yeniden dağıtılabilir..
Hareket ancak bir cisimden diğerine iletilebilir, böylece kapalı bir cisimler sistemindeki toplam miktarı değişmeden kalır, yani korunur. Yukarıda şunun için alındı: iki Momentumun korunumu yasası kolaylıkla kapalı bir sisteme genelleştirilebilir. herhangi bir sayı N önemli nokta vardır ve aşağıdaki gibi formüle edilebilir: Maddi noktalardan oluşan kapalı bir sistemin herhangi bir hareketi için toplam momentum değişmeden kalır:S R ben = sabit; sistem içinde yalnızca momentumun bireysel noktalar arasında yeniden dağıtılması mümkündür.
N tane maddi noktadan oluşan bir sistem düşünün. i'inci nokta için Newton'un ikinci yasasını yazalım: d RBen/dt= F Ben. Bileşke kuvvet F i, sistemin i'inci noktasına etki eden dış ve toplamların toplamı olarak temsil edilecektir. iç kuvvetler: F ben = F ben dahili + S F peki, nerede F ik, k-noktasından itibaren sistemin i-noktasına etki eden iç kuvvettir. Ortaya çıkan eşitlik d RBen/dt= F ben dahili + S F Sistemin i'inci noktası için Newton'un ikinci yasasını ifade eden ik, sistemin tüm n noktalarının toplamı: Sd RBen/dt = S F dahili + SS F yani. Newton'un üçüncü yasasına göre, i-th ve k-th noktalarının birbirlerine etki kuvvetleri eşit büyüklükte ve zıt yöndedir, yani F ik = - F Ki. Bu nedenle, sistemin tüm noktaları üzerindeki iç kuvvetler toplandığında karşılıklı olarak birbirlerini iptal ederler, böylece SS F ik = 0. O halde maddi noktalar sistemi için Newton'un ikinci yasası şu şekilde yazılacaktır: Sd RBen/dt = d/dtS RBen=d R S/dt = S F ben dahili = F S dahili. Ya da sonunda d R S/dt= F S dahili
Sistem kapalı ise, yani ona etki eden dış kuvvetlerin bileşkesi sıfıra eşit: F S dış = 0, sonra d R S/dt = 0, aşağıdaki gibidir R S=S RBen= const – maddi noktalardan oluşan kapalı bir sistemin momentumunun korunumu yasası.
Momentumun korunumu - bir vektör miktarı - herhangi bir bileşeninin korunması, herhangi bir eksene, uzaydaki herhangi bir yöne izdüşümü anlamına gelir. Belirli görevlerde
hoparlörler vektör yasası Momentumun korunumu, karşılık gelen yönlere yansıtılarak skaler biçimde yazılır.
Momentumun korunumu yasası etkili araçlar Etkileşen cisimlerin hareketinin ölçüleri (miktarları) arasındaki ilişkiyi ifade ettiğinden, mekaniğin ana problemini (OPM) çözmek için bir yöntem. Uygulaması özellikle darbe, patlama-kırılma, cisimlerin fırlaması gibi kuvvetlerin doğasını belirlemenin zor olduğu kısa vadeli etkileşimler için, yani OZM'yi çözmeye yönelik bir yaklaşım kullanmanın verimli olduğu ortaya çıkıyor. doğrudan kullanım Newton yasaları. Örneğin dürtüleri bilmek R 1 ve RÇarpışma ve momentumdan önce 2 iki cisim RÇarpma sonrasında cisimlerden birinin i¢'si varsa, momentumun korunumu yasasını kullanarak diğer cismin çarpma sonrasındaki momentumunu hesaplamak mümkündür.
11. Maddi noktalar sistemi. Kütle merkezi Kapalı bir sistemin kütle merkezinin hareketi.
Maddesel noktalardan (rijit cisimlerden) oluşan bir sistemin öteleme hareketi sırasında, sistemin tüm noktaları aynı anlık doğrusal hız ve ivmelerle hareket eder,
ve tüm sistemin /bedenin/ hareketi, herhangi bir noktasının hareketine eşdeğerdir. Tipik olarak sistemin kütle merkezi olarak adlandırılan C noktası, tüm sistemin hareketini modelleyen nokta olarak seçilir. Yarıçap vektörü tarafından verilir R C, yarıçap - vektörler aracılığıyla tanımlanır R Sistemin mi kütleli i maddi noktaları aşağıdaki ifadeyle ifade edilir:
R C = Smi R i/M, burada M = Smi - Brüt ağırlık N noktalı sistemler.
Hız sen Kütle merkezinin hareketi şuna eşittir:
sen c = d RС/dt = d/dt(Smid RBen/M) = Smi sen ben/M = R SANTİMETRE,
Nerede R C = Smi sen Ben- tam dürtü sistemler.
Bir sistemin kütle merkezi hızındaki değişim yasası (veya kütle merkezinin hareket denklemi), bir noktanın dinamiğinin temel denkleminin bir parçacıklar sistemine, katı bir cisme doğal bir genellemesidir. :
A c = d senİle/dt = (1/M)×d RС/dt = F S ex/M –
- kütle merkezi mekanik sistem ortaya çıkan etki altında, kütlesi sistemin M kütlesine eşit olan maddi bir nokta olarak hareket eder.F S dahili harici Sisteme uygulanan kuvvetler. Bu kütle merkezinin hareketi ile ilgili teorem katı bir cismin öteleme hareketi sırasında, tüm noktaları aynı şekilde hareket ettiğinden boyutu ve şeklinin göz ardı edilebileceğini göstermektedir. Ortaya çıkan dış kuvvetler sıfır ise: F S ext = 0, o zaman nokta sisteminin kütle merkezi sabit bir hızda hareket eder, belirli bir durumda hareket durumunu korur - dinlenme. İç etkileşimler kütle merkezinin konumunu değiştirmez; Bu ifade genellikle kapalı bir cisimler sisteminin mekaniğindeki problemleri çözerken kullanılır.
13. Kuvvet anı. Dürtü anı. Dönme hareketi dinamiğinin temel yasası.
Sert bir cismin iki ana dönme hareketi türü vardır:
1) sabit bir O noktası etrafında dönme, hangisinde Vücudun tüm noktaları, merkezi O noktasında olan eşmerkezli kürelerin yüzeyleri boyunca hareket eder.;
2) sabit bir eksen etrafında dönme Z; Burada Vücudun tüm noktaları, merkezleri dönme ekseni olan tek bir düz çizgi üzerinde bulunan daireler halinde döner.Z.
Açısal özellikler: yol j, hız w = d J/dt ve ivme e = d w/dt.
Hareket ve etkileşimin vektör ölçümleri, sırasıyla momentum R ve güç F dönme hareketi ile değiştirilir açısal momentum L Ve kuvvet anı M ve eylemsizlik ölçüsü – kütle m – eylemsizlik momenti J.
Gibi dönme hareketinin vektör ölçüsü biraz malzeme puan mi sabit bir noktaya (kutup) O göre göre, değer seçilir LBen, isminde açısal momentum Ve azimli vektör çarpımı yarıçap vektörü RBen momentumundaki önemli nokta R ben = mil sen Ben: L ben = [ R Ben, R Ben]
Vektör L ona göre yönlendiriliyorum sağ vida kuralı veya vektörün sonundan itibaren L i vektör döndürme R vektöre gidiyorum R en kısa mesafe boyunca saat yönünün tersine hareket ettiğim görülüyor
Buna göre açısal momentum olarak L sağlam(veya malzeme noktaları sistemi) sabit O noktasına göre seçilir vektör miktarı, eşit geometrik toplam dürtü anları L i, puan sistemini (gövdesini) oluşturur: L= S L ben = S[ R Ben, R Ben]
Ders No.2
Ders konusu.Mekanik hareket ve türleri. Mekaniğin temel problemi ve kinematikte çözüm yöntemleri. Fiziksel vücut ve maddi bir nokta. Referans sistemi. Hareketin yörüngesi. Yol ve hareket. Mekanik hareketin göreliliği.
Hedef:Mekanik hareket kavramını tanıtmak, öğrencileri temel kavramlarla tanıştırmak Mekanik hareketi karakterize eden kavramlar, mekanik hareketin göreliliği hakkında fikir verir.
Ders türü:kombine ders
^ Ekipman ve görsel yardımcılar: tramvay, sarkaç, uçağın yörüngesinin fotoğrafları, izlemeov karda vb.
Demolar:hareket gösterileri farklı bedenler, Hareketin göreliliği üzerine araştırmalar, bilgisayar modelleme(maddi bir noktanın hareketi), bir uçağın yörüngesinin fotoğrafları, kardaki izler vb.
^ DERSİN İLERLEMESİ
I. Organizasyon aşaması
II. Güncelleme arka plan bilgisi ve beceriler
Hareket eden ve duran cisimlere örnekler veriniz.
Hareketli cisimlerin sabit cisimlerden farkı nedir?
Çalışma Planı yeni konu
Mekaniğin tanımı.
Mekanik hareket.
Hareket türleri.
Mekaniğin asıl görevi.
Mekanik hareketin göreliliği.
Referans kuruluşu.
Koordinat sistemleri.
Referans sistemi.
Vektör ve skaler büyüklükler.
Yörünge.
Yol.
Hareket ediyor.
Maddi nokta.
Mekanik hareket zamanla uzayda meydana gelen bir değişikliktir göreceli konum gövdeler veya bunların parçaları.
^ Mekaniğin asıl görevi – Vücudun konumunu istediğiniz zaman belirleyin.
Mekanik hareket görecelidir. Aynı cismin farklı cisimlere göre hareketinin farklı olduğu ortaya çıkar. Bir cismin hareketini tanımlamak için hareketin hangi cisme göre ele alındığını belirtmek gerekir. Bu vücuda denir referans gövdesi. Hareketsiz kabul edilir (bu görev için).
^ Vücut pozisyonu uzayda bir koordinat sistemi kullanılarak tanımlanır. Gerçek uzayüç boyutludur ve maddi bir noktanın herhangi bir andaki konumu tamamen üç sayı ile belirlenir - seçilen referans sistemindeki koordinatları.
Kural olarak dikdörtgen veya Kartezyen koordinat sistemi kullanılır 1. Bir noktanın hareketini tanımlamak için, bir referans cismi ve koordinat sistemine ek olarak, çeşitli zaman dilimlerini ölçebileceğiniz bir cihaz olan bir saate de ihtiyacınız vardır.
Referans cismi, koordinat sistemi ve onunla ilişkili saat bir referans sistemi oluşturur.
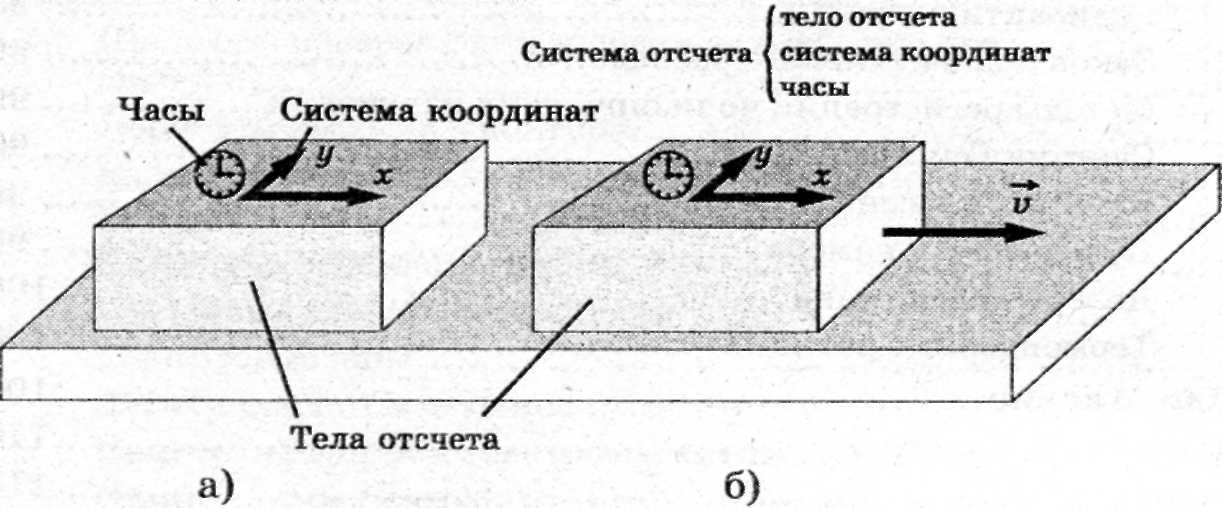
Şekil 2
Mekanik, belirli görevlerin koşullarına bağlı olarak cisimlerin hareketini tanımlamak için farklı yöntemler kullanır. fiziksel modeller. En basit model maddi nokta- Bu problemde boyutları ihmal edilebilecek kütlesi olan bir cisim. Maddi nokta kavramı soyuttur ancak tanıtımı pratik sorunların çözümünü kolaylaştırır. Örneğin, Güneş etrafındaki yörüngelerdeki gezegenlerin hareketini incelerken onları maddi noktalar olarak değerlendirebilirsiniz.
Bedenlerin birbirleri üzerindeki etkisi altında cisimler deforme olabilir, yani şekil ve boyutlarını değiştirebilir. Bu nedenle, mekanikte başka bir model tanıtıldı - kesinlikle katı bir gövde. Kesinlikle sağlam gövde hiçbir koşulda deforme olamayacak bir cisimdir ve her koşulda bu cismin iki noktası arasındaki (veya daha doğrusu iki parçacık arasındaki) mesafe sabit kalır.
^ Fiziksel miktar - bu niteliksel anlamda çeşitli maddi nesneler veya olgular için ortak olan, ancak bireysel değerler her biri için.
Fiziksel bir miktarı ölçmek, onu birim olarak alınan homojen bir miktarla karşılaştırmak anlamına gelir.
Fiziksel niceliklere örnek olarak yol, zaman, kütle, yoğunluk, kuvvet, sıcaklık, basınç, voltaj, aydınlatma vb. verilebilir.
^ Fiziksel miktarlar Skaler ve vektörel olanları vardır. Skaler fiziksel büyüklükler yalnızca karakterize edilir sayısal değer vektör olanlar hem sayıya (modül) hem de yöne göre belirlenir. Skaler fiziksel büyüklükler zaman, sıcaklık, kütledir; vektörel olanlar ise hız, ivme, kuvvettir.
Zaman içinde bir noktadan diğerine hareket eden bir cisim (maddi nokta), belirli bir çizgiyi tanımlar. vücudun yörüngesi.
^ Kat edilen mesafe ben vücudun bir süre boyunca kat ettiği yörüngenin yay uzunluğuna eşittir T . Yol skaler bir miktardır.
Şekil 3
Yarıçap vektörü  M noktası – O başlangıç noktasını M noktasına bağlayan yönlendirilmiş bir düz çizgi parçası. (Şekil 3)
M noktası – O başlangıç noktasını M noktasına bağlayan yönlendirilmiş bir düz çizgi parçası. (Şekil 3)
Bedeni hareket ettirerek  Bir cismin başlangıç konumunu sonraki konumuna bağlayan yönlendirilmiş düz çizgi parçasına denir. Yer değiştirme vektörel bir büyüklüktür.
Bir cismin başlangıç konumunu sonraki konumuna bağlayan yönlendirilmiş düz çizgi parçasına denir. Yer değiştirme vektörel bir büyüklüktür.
![]()
Şekil 4
Koordinatları kullanarak bir noktanın konumunu belirleme X = X (T), sen = sen (T) Ve z = z (T) ve yarıçap vektörü.  – zamanın ilk anında noktanın konumunun yarıçap vektörü.
– zamanın ilk anında noktanın konumunun yarıçap vektörü.
Şekil 5.
Kat edilen mesafe ve yer değiştirme vektörü eğrisel hareket bedenler. a ve b – başlangıç ve uç nokta yollar
^ IV. Yeni bilgi ve becerilerin pekiştirilmesi
Bir adam tramvayda seyahat ediyor. Bir kişinin dinlenme halinde olduğu ve hareket ettiği cisimleri adlandırın.
Yörüngenin şekli referans cismin seçimine bağlı mı? Cevabınızı örneklerle açıklayınız.
Bir cismin maddi bir nokta olarak kabul edilebileceği durumlara örnekler verin.
Sporcu havuzdaki su parkurunu 2 kez yüzer. Havuzdaki parkurun uzunluğu 50 m ise sporcunun yolunu ve yer değiştirmesini bulunuz.
Yürüyen merdiven, duran bir yolcuyu 1 dakikada kaldırıyor. Yürüyen merdiven sabitse yolcu 3 dakika içinde yükselir. Yukarıya doğru hareket eden yürüyen merdivene bir yolcunun tırmanması ne kadar sürer?
Dersi özetlemek
Ev ödevi
Ders kitabı ödevi. Öğrenmek §
Problem kitabına göre ödev. Hayır'ı çöz.
Ek görev. Arabanın tekerlek jantı noktasının yörüngesini sürücüye ve yolun yakınında duran kişiye göre çizin.
1 İlk kez dikdörtgen sistem Girilen koordinatlar René Descartes“Yöntem Üzerine Söylem” adlı eserinde 1637. Bu nedenle dikdörtgen koordinat sistemine aynı zamanda - denir. Kartezyen sistem koordinatlar Geometrik nesneleri tanımlamanın koordinat yöntemi temeli attı analitik geometri. Ayrıca koordinat yönteminin geliştirilmesine katkıda bulundu Pierre Fermat Ancak eserleri ilk kez ölümünden sonra yayımlandı. Descartes ve Fermat'ın kullandığı koordinat yöntemi sadece uçakta.
için koordinat yöntemi üç boyutlu uzay ilk kullanılan
Mekanik hareket her zaman nispetenÇünkü bir cismin uzaydaki konumu ancak başka bir cisimle ilişkili olarak belirlenebilir. referans organları. Bir koordinat sistemi referans cismi ile sıkı bir şekilde ilişkilidir, bu da cismin farklı zamanlardaki koordinatlarının belirlenmesini mümkün kılar. Referans cismi koordinat sistemiyle birlikte denir. referans sistemi. Mekanik hareket her zaman şu veya bu referans sisteminde gözlemlenir (dikkate alınır), aynı hareket farklı görünür. farklı sistemler geri sayım.
Referans kuruluşu- diğer organların konumunun belirlendiği, keyfi olarak seçilmiş bir organ.
Referans sistemi- bir referans cismi ile ilişkili bir dizi koordinat sistemi ve saat.
En yaygın koordinat sistemi dikdörtgendir ( Kartezyen), yani ortonormal temeli modülü ve karşılıklı olarak üç birimden oluşan ortogonal vektörler , kökeninden alınmıştır.
O halde bir noktanın uzaydaki konumu iki şekilde tanımlanabilir:
1) vektör, yani yarıçap vektörünü ayarlayın . Yarıçap vektörü koordinatların başlangıç noktasından uzaydaki bir noktaya çizilen bir vektördür. şu anda zaman maddi bir nokta var;
2) koordinat - üç koordinat belirleyin: x, y, z(Şekil 1).
Nokta konumu A yarıçap vektörü ile karakterize edilir
karşılık gelen eksenlerin pozitif yönleriyle çakışan birim vektörler (ortlar) nerede; – yarıçap vektörünün izdüşümleri ve aynı zamanda malzeme noktasının koordinatları.
Yarıçap vektörünün modülü şu ifadeyle belirlenir:
Maddi bir noktanın hareketi şu şekilde tamamen belirlenir: Kartezyen koordinatlar Maddi noktalar zamanın bir fonksiyonu olarak verilmiştir:
Bu denklemlere denir bir noktanın kinematik hareket denklemleri. Bunlar bire eşdeğerdir vektör denklemi nokta hareketleri:
Vektörü taşı- Hareket eden bir noktanın başlangıç konumundan belirli bir zamandaki konumuna çizilen bir vektör (dikkate alınan zaman süresi boyunca noktanın yarıçap vektörünün artması). Daha sonra maddi noktanın noktadan yer değiştirme vektörü A asıl noktaya B formülle belirlenir (Şekil 2)
Hareket vektör modülü
Seçilen bir referans sistemine göre hareket eden bir malzeme noktası (veya gövdesi) tarafından tanımlanan çizgiye denir. yörünge. Yörünge denklemi parametrenin ortadan kaldırılmasıyla elde edilebilir T kinematik denklemlerden. Yörüngenin şekline bağlı olarak hareket basit veya eğrisel.
Yolun uzunluğu nokta, söz konusu süre boyunca bu nokta tarafından kat edilen yörüngenin tüm bölümlerinin uzunluklarının toplamıdır. Yol uzunluğu skaler zamanın fonksiyonu. Miktarlar ve miktarlar yalnızca doğrusal hareket durumunda çakışır.
Δ sınırında T→0 akor yolu uzunluğu Δ S ve akorun uzunluğu yoldan giderek daha az farklı olacaktır, bu nedenle: .
Hız
Hız Belirli bir zamanda hareketin hem hızını hem de yönünü belirleyen vektör miktarıdır.
Vektör ortalama hız(hareket)Δ zaman aralığı için T bir noktanın yarıçap vektörünün artışının Δ zaman aralığına oranıdır T
Ortalama hız vektörünün yönü yön ile çakışmaktadır. Hız birimi- m/sn.
Ortalama (yer) hızı Bir noktanın kat ettiği yolun hareket zamanına oranı denir
![]() .
.
Ortalama yer hızı bir skalerdir.
Anlık hız söz konusu noktanın yarıçap vektörünün birinci zaman türevine eşit bir vektör miktarıdır:
anlık hız vektörünün , , ekseni üzerindeki izdüşümleri sırasıyla nerededir. Bu hız ana hızdır fiziksel miktar Hareketin doğasını ve yönünü belirleyen.
Anlık hız vektörünün modülü
![]() .
.
Anlık hız vektörü, hareket yönünde yörüngeye teğet olarak yönlendirilir. Anlık hızın büyüklüğü (skaler büyüklük), yolun zamana göre birinci türevine eşittir.
Bu formül önemli bir sonuç ortaya koyuyor: .
Yol uzunluğuS zaman aralığı boyunca nokta tarafından geçilen T 1 ila T 2, integral tarafından verilir: /
Şu tarihte: düz hareket noktasında hız vektörünün yönü değişmeden kalır. Bir noktanın hareketine denir üniforma, eğer hızının modülü zamanla değişmiyorsa ( v= const), onun için
Hız modülü zamanla artarsa harekete denir. hızlandırılmış zamanla azalırsa hareket denir yavaş.
Hızlanma
Hızlanma hızdaki değişimin hızını büyüklük ve yönde karakterize eden bir vektör miktarıdır.
Ortalama hızlanmaΔ zaman aralığında T- vektör miktarı, orana eşitΔυ hızındaki Δ zaman aralığına değişiklikler T:
Anında hızlanma Maddi bir noktanın miktarı, aşağıdaki ifadeyle tanımlanan bir vektör miktarıdır:
sırasıyla eksenler üzerindeki ivme izdüşümleri nerededir?
Hızlanma ünitesi- m/sn 2.
Vektör modülü anlık hızlanma
Anlık ivmenin yarıçap vektörünün ikinci türevi olduğunu göstermek kolaydır
İÇİNDE genel durum anlık ivme vektörü aynı zamanda zamanın bir fonksiyonu da olabilir, o zaman zaman türevleri yüksek sipariş, Örneğin
Çoğu durumda ivme vektörünün yönü önceden bilinmediğinden, ivme vektörünü bir vektör toplamı olarak temsil etmek uygundur.
Bu durumda anlık ivme vektörüne toplam ivme adı verilir. Sonra denir normal (merkezcil) ivme şu şekilde tanımlanır:
Nerede - eğrilik yarıçapı Belirli bir noktadaki yörüngeler sayısal olarak yarıçapa eşit sonsuz küçük bir kısmında yörüngeyle birleşen bir daire; – eğriliğin merkezine yönlendirilmiş birim normal vektör.
Normal ivme vektörünün modülü
Normal ivme, normal boyunca yörüngeye, eğriliğinin merkezine doğru yönlendirilir O ve noktanın hız vektörü yönündeki değişimin hızını karakterize eder.
Toplam ivmenin ikinci terimine denir teğetsel ivme
burada hareketli bir noktayla ilişkili ve hız vektörü boyunca yörüngeye teğet olarak yönlendirilen bir birim vektördür.
Vektör modülü teğetsel ivme
Teğetsel ivme, hız modülündeki değişim oranını karakterize eder (Şekil 4). Teğetsel ivme vektörü anlık hız vektörüyle ( eşittir hızlandırılmış hareket) ve onun tam tersidir (düzgün yavaş çekim). Açıkçası, eğer – hareket hızlandırılırsa; – hareket yavaştır.
Eğrisel hareket sırasında toplam ivme vektörünün modülü
Normal ivmenin büyüklüğünün bir daire içindeki hareketin hızı υ ve yarıçapın büyüklüğü ile nasıl ilişkili olduğunu gösterelim. R(Şekil 5, a ve b).
Bunu yapmak için, hareket yörüngesi üzerinde Δ zaman aralığıyla ayrılmış, birbirine yakın iki noktayı (1 ve 2) alalım. T(Şekil 5, a). υ 2 vektörünü kendisine paralel olarak 1 noktasına hareket ettirelim ve üzerine υ 1 vektörüne eşit büyüklükte bir parça koyarak 3 noktasını elde ederiz (Şekil 1). B). Daha sonra vektör iki vektörün toplamı olarak temsil edilebilir. Δ'da t→ 0 açıları α ve β sırasıyla 0° ve 90° olma eğilimindedir, dolayısıyla yörüngeye teğet yönlendirilmiş vektör değişikliği karakterize edecektir sayısal değer hız ve vektör ’ye dik olacaktır. Buradan,
1 ve 2 noktaları arasındaki yay uzunluğu ve düz çizgi mesafesi (Şekil 5, A) küçük Δ için t→ D T d'ye eşit olacak ben 1,2 = d S 1,2 = v D T. Δ1 üçgenlerinin benzerliğinden 0 2 (Şek. 1.3 A) ve Δ1 v 1 3 (Şek. 5, B) gerekir
Eğrilik yarıçapı Yörünge, sonsuz küçük bir bölümde yörüngenin belirli bir bölümünde onunla çakışan dairenin yarıçapıdır. Böyle bir dairenin merkezine denir eğrilik merkezi eğri üzerinde belirli bir nokta için. Yörünge bölümünün elemanı D'ye eşitse S, daha sonra belirli bir noktadaki yörüngenin eğrilik yarıçapı şu ifadeyle belirlenir:
D yörünge bölümünün kapatıldığı açı nerede S. Doğrusal hareket sırasında normal bir ivme yoktur, çünkü bu durumda eğrilik yarıçapı R®¥. Eğrilik yarıçapının tersi denir eğrilik:
Pirinç. 6. Yörüngenin farklı eğrilik yarıçaplarına örnekler
Kinematiğin ana görevi, maddi bir noktanın durumunu (yarıçap vektörü ve zamanın herhangi bir anında hızı) belirlemektir. T). Bunu yapmak için öncelikle şunları ayarlamak gerekir: başlangıç koşulları– zamanın ilk anında yarıçap vektörü ve hız t = t 0 ve ikincisi, ivmenin zamana bağımlılığı T. Daha sonra integral kavramlarını kullanarak for ve aşağıdaki ifadeleri yazabiliriz:
, ,  .
.