Klasik Newton mekaniğinde cisimlerin boyutları ve olaylar arasındaki zaman aralıkları mutlak değerler olarak kabul edilir. Bu, bu cismin hareket halinde mi yoksa hareketsiz mi olduğunu belirtmeden cisimlerin uzunluğundan bahsedebileceğimiz anlamına gelir.
1. referans sisteminden diğerine geçerken doğrusal ölçekler (bölümlerin uzunluğu) ve zaman aralıkları değişmeden kalır; referans sisteminin seçimine bağlı değildir. Bu fikirler Newton'un uzay ve zamanın mutlaklığı kavramını yansıtmaktadır.
2.Kinematik
Burası mekaniğin bir bölümü, kedi. Bu harekete yol açan nedenlerle ilgilenmeden, cisimlerin hareketini tanımlamanın yollarını araştırırlar.
3. Yörünge
Bu, parçacığın hareket ettiği uzayda bir çizgidir (parçacığın yarıçap vektörünün uçlarının geometrik konumu)
4. Hareketli D = D 2 – D 1 R bir süreliğine D T 1 Parçacığın başlangıç noktasından son konumuna kadar (noktadan) çizilen bir vektördür. 2 ).
asıl noktaya< 5. Ortalama hız vektörü>.
v< 5. Ortalama hız vektörü> Ortalama hız vektörü bir süreliğine D parçacık yer değiştirmesinin zaman D oranına eşit bir vektördür
v < 5. Ortalama hız vektörü> bunun için taahhüt edildi: yer değiştirme vektörü ile aynı yönde çakışırD.
D5. Ortalama hız vektörü 6.Anında hız parçacıklar (veya basitçe hız D) yarıçap vektörünün türevine eşit bir vektördür
zamana göre: 5. Ortalama hız vektörü Anlık hız parçacık hareketi yönünde yörüngeye teğet olarak yönlendirilir
7. .SI:m/sn Hızlanma 5. Ortalama hız vektörü hızın zamana göre türevine eşit bir vektör denir
parçacıklar:
8. Hareket kanunu
parçacık koordinatlarının zamana bağımlılığı denir:
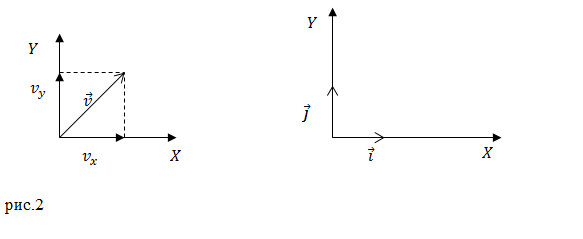
Hareketi tanımlamaya yönelik vektör ve koordinat yöntemleri arasında basit bir bağlantı vardır. Herhangi bir vektör, koordinat eksenleri üzerindeki izdüşümleriyle tanımlanabilir. Örneğin bir parçacığın yarıçap vektörü: Nerede, Ben, J k
9. – koordinat eksenlerinin birim vektörleri.
Hareketi tanımlamanın koordinat yöntemiyle hız 5. Ortalama hız vektörü Hız
herhangi bir vektör gibi, DSC eksenindeki projeksiyonlar aracılığıyla temsil edilebilir: Onlar.,5. Ortalama hız vektörü hız ![]()
parçacıklar aşağıdaki biçimde temsil edilebilir: Fonksiyonlar aracılığıyla ifade edilen hız bileşenlerinin olduğu görülebilir.(bir süreliğine D), X(bir süreliğine D), sen(bir süreliğine D z
![]()
10.), eşittir Hareketi belirtmenin koordinat yöntemiyle hızlanma Hızlanma A
herhangi bir vektör gibi, DSC eksenindeki projeksiyonlar aracılığıyla temsil edilebilir: Onlar.,5. Ortalama hız vektörü herhangi bir vektör gibi, DSC eksenindeki projeksiyonlar aracılığıyla temsil edilebilir:
![]()
11.parçacıklar aşağıdaki biçimde temsil edilebilirYol S Yol) yörünge boyunca ölçülen ve parçacığın hareketi sırasında kat ettiği mesafeye (yörünge uzunluğu) eşittir. 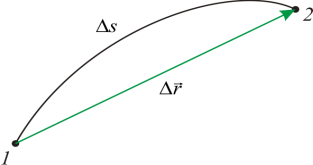
12. Yol, negatif olmayan ve azalmayan skaler bir niceliktir.
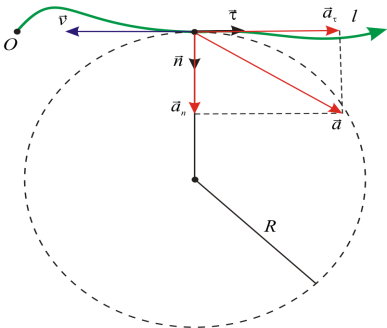
Hızlanma Toplam parçacık ivmesi
birbirine dik iki bileşenin toplamı olarak temsil edilebilir: ![]()
13.Tam hızlanma modülü:
Teğetsel (teğetsel) ivme Hızlanma bir süreliğine D Vektör Hızlanma parçacığın yörüngesine teğetsel olarak yönlendirilmiş; aynı zamanda 5. Ortalama hız vektörü T Hızlanma, eğer hareket hızlandırılırsa; 5. Ortalama hız vektörü T Hızlanma, eğer hareket yavaşsa. Bir parçacığın teğetsel ivmesi, parçacığın hız modülündeki değişimi karakterize eder (eğer
14.t = 0, hareket tekdüzedir).
normal (merkezcil)
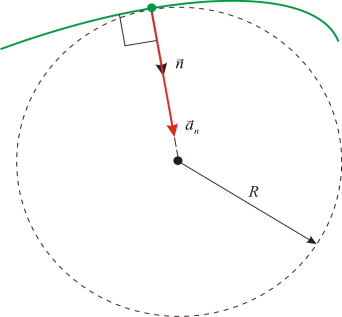
Teğetsel (teğetsel) ivme Hızlanma hızlanma N Hızlanma hızlanma ^5. Ortalama hız vektörü her zaman hareketin yörüngesine teğete dik, yani. Hızlanma hızlanma ^Hızlanma Ve
T. Normal ivme, hızdaki yöndeki değişikliği karakterize eder (doğrusal hareket için, = ¥, Hızlanma hızlanma = 0)
15.R
Kesinlikle sert gövde
16. mekanikte, hareketi sırasında herhangi iki noktası arasındaki mesafelerin değişmeden kaldığı bir cisim denir. Böylece katı gövde dış kuvvetlerin etkisi altında deforme olmaz. Vücudun serbestlik derecesi sayısı cismin uzaydaki konumunu belirlemek için ayarlanması gereken bağımsız değişkenlerin (miktarların) sayısıdır.Örnek. Fonksiyonlar aracılığıyla ifade edilen hız bileşenlerinin olduğu görülebilir., X, sen).
17.Maddi bir noktanın serbestlik derecesi sayısı 3'tür (üç bağımsız değişken (koordinat)
Vücudun açısal hızı Vücudun bir eksen etrafında dönmesine izin verin Z kısa sürede gerçekleştirilen dt temel dönüşBen.D Vücudun açısal hızı
vektör denir Vektör w temel dönüşBen vektör ile aynı yönde çakışır Vektör yani vektörün izdüşümü ile doğru bir vida oluşturacak şekilde gövdenin dönme ekseni boyunca yönlendirilir. Vücudun bir eksen etrafında dönmesine izin verin eksen başına ![]()
![]()
ve modülü: Vektör
– Ölçü birimi
(radyan bölü saniye)
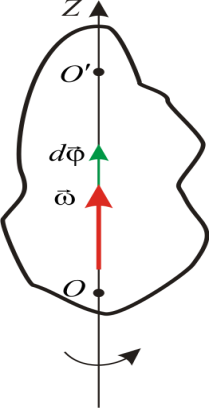
rad/s
Doğrusal hız ifadesi, bir cismin eğrisel hareketi göz önünde bulundurulduğunda kullanılır ve $v\ $ hızı ile $\omega $ suç hızı arasındaki farkı vurgulamak ister. Çoğu zaman doğrusal kelimesi atlanır ve sadece hız denir.
Ortalama hız vektörü
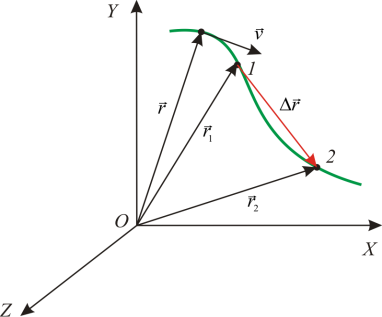
Tanım Hareketin ($\Delta \overline(r)$) bu hareketin meydana geldiği zaman dilimine oranına denir. ortalama hız
($\left\langle \overline(v)\right\rangle $) hareketleri:
\[\left\langle \overline(v)\right\rangle =\frac(\Delta \overline(r))(\Delta t)\left(1\right),\]
$\left\langle \overline(v)\right\rangle $ ortalama hız vektörü $\Delta \overline(r)$ vektörüyle aynı yöne sahiptir, çünkü $\Delta t>0$. Ortalama hız vektörünü gösteren parçanın uzunluğu (Şekil 1), $\Delta \overline(r)$ vektörünün uzunluğuyla ilişkili değildir.
Ortalama hız, bir noktanın hareket ettiği hızı karakterize eder. Bu özellik belirli bir zaman dilimini ifade eder.
Eğer bir cisim bir eğri boyunca hareket ediyorsa, o zaman yayın uzunluğu her zaman uzunluktan küçük olduğundan yol ($\Delta s$), aynı zaman periyodu için yer değiştirme modülünden ($\Delta r$) daha büyüktür. onu daraltan akorun (Şekil 1). Yol ve yer değiştirme, tek yönde düz bir çizgide hareket ederken çakışır. Yolun ortalama hızı şu şekilde tanımlanır:
\[\left\langle v\right\rangle (\rm =)\frac(\Delta s)(\Delta t)\left(2\right).\]
Ortalama hız, maddi bir noktanın sonlu bir zaman periyodundaki hareket hızını karakterize eder
Anlık hız
Ortalama hız vektörü
Parçacığın hareketinin dikkate alındığı zaman dilimini ($\Delta t\0$'a) azaltarak, zamanın belirli bir anında bir noktanın hareketinin karakteristiğini elde ederiz. Değer şuna eşittir:
\[\overline(v)=(\mathop(\lim )_(\Delta t\to 0) \left\langle \overline(v)\right\rangle =\ )(\mathop(\lim )_(\ Delta t\to 0) \frac(\Delta \overline(r))(\Delta t)=\frac(d\overline(r))(dt)\left(3\right),\ )\]
isminde anlık hız veya sadece hız.
Formül (3)'ü kullanarak hızı hesaplarken, $\Delta t$ zaman aralığındaki bir azalmanın, sonunda ortalama hızın bir sonraki elde edilen değerlerinin birbirinden çok az farklı olacağı gerçeğine yol açtığı açıktır. Bu nedenle anlık hızı bulurken, hız değerinin gerekli doğruluğunu elde edebilmek için $\Delta t,\ $ancak küçük bir son değerde dururlar.
(3) sınırına geçişin geometrik bir anlamı vardır. $\Delta \overline(r)$ vektörü, yörüngenin iki noktasını birleştiren kiriş boyunca yönlendirilir; bu noktaların yakınsaması, bu vektörün belirli bir noktada hareket yörüngesine teğet konumunu almasına yol açar; . Hız vektörünün hareket yörüngesine teğet olarak yönlendirildiği ortaya çıktı. Doğrusal harekette hız vektörü düz bir çizgiye yönlendirilir.
Seyahat hızı benzer şekilde belirlenir:
Maddi bir noktanın yörüngesi düzgün bir eğri ise, yay ne kadar kısa olursa, kirişin uzunluğuna o kadar yakın olur. $\ \Delta t\'den 0$'a kadar olan limite geçişte, $\Delta s\'den \Delta r$'a kadar olduğunu varsayabiliriz. Buradan,
Hız ekleme
Hız vektörel bir büyüklüktür. Eğer maddi bir nokta birden fazla harekette yer alıyorsa, hızı her bir hareketin hızının vektör toplamı olarak bulunur:
\[\overline(v)=\sum\limits_i((\overline(v))_i\left(6\right.)\]
Bazı durumlarda karmaşık bir hareketi birkaç basit hareketin üst üste binmesi olarak düşünmek uygundur. O halde eşitlik (6), hız vektörünün bileşenlere ayrıştırılması için bir kural olarak düşünülebilir.
Hareketin hızı ve hızlanması
Düzensiz hareket ederken, maddi bir noktanın ivmesi vardır ($\overline(a)$). İvme, hızın zamana göre ilk türevidir:
\[\overline(a)=\frac(d\overline(v))(dt)\left(7\right).\]
İfade (7)'den, bir noktanın ivmesi bilindiğinde hızın şu şekilde bulunduğu anlaşılmaktadır:
\[\overline(v)=\int\limits^(t_2)_(t_1)(\overline(a)dt)\left(8\right).\]
Açısal ve doğrusal hızlar
Bir daire içinde hareket ederken, yörünge boyunca hareket hızıyla ($v$ - doğrusal hız) birlikte, dönüş açısındaki değişim hızını karakterize eden açısal hız ($\omega $) eklenir $\varphi $:
\[\omega =\frac(d\varphi )(dt)\left(9\right).\]
Doğrusal ve açısal hızlar arasındaki ilişki şu ifadeyle verilir:
Çözümlü problem örnekleri
Örnek 1
Egzersiz yapmak. Malzeme noktasının konumunu belirleyen yarıçap vektöründeki değişiklik şu denklemle verilir: $\overline(r\ )\left(t\right)=t^4\overline(i)+3t^2\overline( j),$ burada $\ overline(i)$ ve $\overline(j)$, X ve Y eksenlerinin birim vektörleridir (Şekil 2). $t=1$c anındaki noktanın anlık hızı nedir?
Çözüm. Parçacık hızını şu şekilde tanımlayalım:
\[\overline(v)=(\frac(d\overline(r))(dt) \left(1.1\right).\ )\]
Formül (1.1)'de $\overline(r\ )\left(t\right)=t^4\overline(i)+3t^2\overline(j),$ yarıçap vektörünün denklemini yerine koyarsak şunu elde ederiz:
\[\overline(v)=\frac(d)(dt)\left(t^4\overline(i)+3t^2\overline(j)\right)=4t^3\overline(i)+6t \overline(j)\ \left(1.2\right).\]
Denklem (1.2)'den şunu görüyoruz:
\[\left\( \begin(array)(c) v_x=4t^3 \\ v_y=6t \end(array) \right.\left(1.3\right).\]
Pisagor teoremini takiben hız modülünü şu şekilde buluruz:
Ortaya çıkan formülde $t=1$c süresini değiştirerek hızı hesaplayalım:
Cevap.$v$=7.2 $\frac(m)(s)$
Örnek 2
Egzersiz yapmak. Maddi bir nokta düz bir çizgide hareket eder. Bu noktanın ivmesi grafiğe göre artmaktadır (Şekil 3). $t_1 anındaki noktanın hızı ne olacak?$
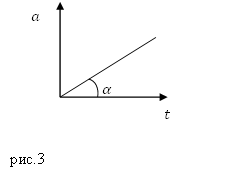
Çözüm.Şekil 3'teki grafikte ivme, koordinatların orijininden gelen düz bir çizgi olarak gösterilmektedir; Şekil 3'e göre ivmenin analitik ifadesini şu şekilde yazıyoruz:
burada $k=tg\ \alpha $.
Noktanın hızını şu şekilde buluruz:
Cevap.$v=\frac(tg\ \alpha \cdot t^2_1)(2)$
t 0 iken m.t.'nin uzayda hareket ettiği t zaman periyodunu süresiz olarak azaltarak anlık hızı elde ederiz;
Anlık hız vektörü, m.t yarıçap vektörünün artışının, bu artışın meydana geldiği zaman periyoduna oranının sınırına eşittir. bir süreliğine D 0 veya yarıçap vektörünün zamana göre birinci türevine eşittir.
Belirli bir zamanda anlık hız vektörü, belirli bir noktadaki yörüngeye teğet olarak yönlendirilir (Şekil 9).
Aslında, t 0'da, M 2 noktası M 1'e yaklaştığında akor (sekant)  , yay parçasının uzunluğuna s yaklaşır ve s = sınırında ve sekant bir teğet haline gelir. Bu, deneylerle açıkça doğrulanmıştır. Örneğin, bir aletin bilenmesi sırasında ortaya çıkan kıvılcımlar her zaman taşlama taşına teğet olarak yönlendirilir. Hız vektörel bir büyüklük olduğundan modülü
, yay parçasının uzunluğuna s yaklaşır ve s = sınırında ve sekant bir teğet haline gelir. Bu, deneylerle açıkça doğrulanmıştır. Örneğin, bir aletin bilenmesi sırasında ortaya çıkan kıvılcımlar her zaman taşlama taşına teğet olarak yönlendirilir. Hız vektörel bir büyüklük olduğundan modülü
 .
.
Bazı hızlandırıcı türlerinde (örneğin siklotronlar vb.), parçacıklar kapalı bir yörünge boyunca durmadan tekrar tekrar hareket eder. Sonuç olarak, yörüngenin herhangi bir noktasında anlık hız vektörünün mutlak değeri sıfırdan farklı olmalıdır. Bu sonuç yalnızca denklem (15) ile doğrulanmakla kalmaz, aynı zamanda ortalama skaler hız kavramıyla da (formül 11) tutarlıdır. Eğer denklem (11)'de t 0'daki sınıra gidersek, o zaman s yörüngesindeki yolun temel yer değiştirme vektörünün modülünden farklı olmayan bu kadar küçük bölümlerini dikkate almamız gerekecektir. . Daha sonra denklem (11)'e dayanarak anlık skaler hızın değerini elde edebiliriz. 
anlık hız vektörünün büyüklüğü ile çakışan  ,
,
t 0'da r = s olduğundan.
Anlık hız vektörünün (15) bir denklemi, üç skaler denklemden oluşan eşdeğer bir sistemle değiştirilebilir; hız vektörünün koordinat eksenleri üzerindeki projeksiyonları
v x = dx/dt, v y = dy/dt, v z = dz/dt. (16)
Anlık hız vektörü, koordinat eksenleri üzerindeki izdüşümleriyle şu ifadeyle ilişkilidir:
 ,
(17)
,
(17)
Nerede  – sırasıyla X, Y, Z eksenleri boyunca yönlendirilen birim vektörler.
– sırasıyla X, Y, Z eksenleri boyunca yönlendirilen birim vektörler.
Modulo
 .
(18)
.
(18)
Böylece hız vektörü, uzaydaki hareketin zaman içindeki değişim hızını büyüklük ve yönde karakterize eder. Hız zamanın bir fonksiyonudur.
1.12. Ortalama hızlanma
Cisimler hareket ettiğinde genel durumda hız hem büyüklük hem de yön olarak değişebilir.
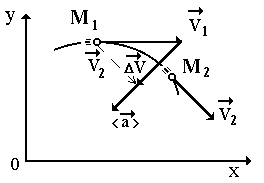
m.t.'nin t 1 zamanında M 1 noktasında olmasına ve hızıyla hareket etmesine izin verin.  ve t 2 zamanında - M 2 noktasında - hızla
ve t 2 zamanında - M 2 noktasında - hızla  (Şekil 10).
(Şekil 10).
Vektörü hareket ettirelim M 1 noktasında kendisine paralel olacak şekilde vektörlerin orijinleri çakışacaktır. Ve .
O zaman vektör farkı Ve t = t 2 – t 1 süresi boyunca hızın değişim (artış) vektörüdür, yani.
 .
(19)
.
(19)
Ortalama ivme vektörü, hız değişim vektörünün bu değişimin meydana geldiği zaman periyoduna oranına eşittir.
Buradan,
 .
(20)
.
(20)
Ortalama ivme vektörü, hız değişim vektörünün yönü ile çakışır ve yörüngenin eğriliğinin içine doğru yönlendirilir.
Bir vektör denklemi (1.20), ortalama ivme vektörünün koordinat eksenlerine izdüşümü için üç skaler denklemden oluşan bir sisteme karşılık gelir.
Ortalama ivme vektör modülü
 .
(22)
.
(22)
SI ivme birimi saniye kare başına metredir.
Hızın büyüklüğü (veya hız vektörünün büyüklüğü) değişmiyorsa hareket tekdüzedir; hızın büyüklüğü değiştiğinde ise eşit değildir.
Üniforma isminde Bir cismin eşit zaman aralıklarında aynı yolları kat ettiği hareket. Bu durumda hızın büyüklüğü değişmeden kalır (yönde hareket eğrisel ise hız değişebilir).
basit isminde Yörüngenin düz bir çizgi olduğu hareket. Bu durumda hızın yönü değişmeden kalır (hareket tek biçimli değilse hızın büyüklüğü değişebilir).
Üniforma düz hem düzgün hem de doğrusal olan harekete denir. Bu durumda hem büyüklük hem de yön değişmeden kalır.
Genel durumda, bir cisim hareket ettiğinde hız vektörünün hem büyüklüğü hem de yönü değişir. Bu değişikliklerin ne kadar hızlı gerçekleştiğini karakterize etmek için özel bir miktar kullanılır - ivme.
Hızlanma – bu, bir cismin hızındaki değişimin, bu hız değişiminin meydana geldiği zaman diliminin süresine oranına eşit bir miktardır. Bu tanıma göre ortalama ivme m/s²'dir:
Anında hızlanma isminde ortalama ivmenin belirli bir aralıkta yöneldiği sınıra eşit fiziksel nicelik∆t → 0, m/s²:
Hız yörünge boyunca hem büyüklük hem de yön olarak değişebildiğinden, ivme vektörünün iki bileşeni vardır.
Belirli bir noktada yörüngeye teğet boyunca yönlendirilen ivme vektörü a bileşenine, hız vektöründeki büyüklükteki değişimi karakterize eden teğetsel ivme denir.
Yörünge üzerinde belirli bir noktada normal boyunca teğete yönlendirilen ivme vektörünün bileşenine normal ivme denir. Eğrisel hareket durumunda hız vektöründeki yöndeki değişimi karakterize eder. Doğal olarak, bir cisim düz bir çizgi boyunca hareket ettiğinde normal ivme sıfırdır.
Doğrusal hareket, herhangi bir süre boyunca vücudun hızı aynı miktarda değişiyorsa, düzgün değişken olarak adlandırılır. Bu durumda ilişki
∆V/ ∆t her zaman aralığı için aynıdır. Bu nedenle ivmenin büyüklüğü ve yönü değişmeden kalır: a = sabit.
Doğrusal hareket için ivme vektörü hareket çizgisi boyunca yönlendirilir. İvmenin yönü hız vektörünün yönü ile çakışırsa hızın büyüklüğü artacaktır. Bu durumda harekete eşit hızlanma denir. İvmenin yönü hız vektörünün yönünün tersi ise hızın büyüklüğü azalacaktır. Bu durumda harekete eşit derecede yavaş denir. Doğada eşit şekilde hızlanan doğal bir hareket vardır - bu serbest düşüştür.
Serbest düşüş- isminde Bir cismin düşmesi, eğer ona etki eden tek kuvvet yerçekimi ise. Galileo'nun yaptığı deneyler, serbest düşme sırasında tüm cisimlerin aynı yerçekimi ivmesiyle hareket ettiğini ve ĝ harfiyle gösterildiğini gösterdi. Dünya yüzeyine yakın ĝ = 9,8 m/s². Serbest düşüşün hızlanmasına Dünya'dan gelen yerçekimi neden olur ve dikey olarak aşağıya doğru yönlendirilir. Açıkçası böyle bir hareket yalnızca boşlukta mümkündür. Havaya düşmenin yaklaşık olarak serbest olduğu düşünülebilir.
Serbest düşen bir cismin yörüngesi başlangıç hız vektörünün yönüne bağlıdır. Bir cisim dikey olarak aşağı doğru fırlatılırsa, yörünge dikey bir parçadır ve harekete tekdüze değişken denir. Bir cisim dikey olarak yukarı doğru fırlatılırsa, yörünge iki dikey bölümden oluşur. İlk olarak vücut aynı derecede yavaş hareket ederek yükselir. Maksimum yükseliş noktasında hız sıfır olur, ardından vücut eşit şekilde hızlanarak hareket ederek alçalır.
Başlangıç hız vektörü ufka belli bir açıyla yönlendirilirse, hareket bir parabol boyunca meydana gelir. Atılan bir top, bir disk, uzun atlama yapan bir sporcu, uçan bir mermi vb. bu şekilde hareket eder.