Nếu quỹ đạo của một điểm vật chất là một đường cong thì chúng ta gọi chuyển động đó là đường cong.
Với chuyển động này, nó thay đổi cả về độ lớn và hướng. Vì vậy, khi chuyển động cong.
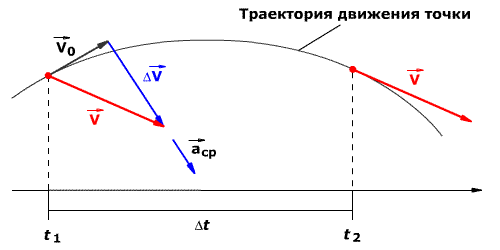
 Chúng ta hãy xem xét sự chuyển động của một điểm vật chất dọc theo quỹ đạo cong(Hình 2.11). Vectơ vận tốc tại một điểm bất kỳ của quỹ đạo có hướng tiếp tuyến với nó. Gọi vận tốc tại điểm M 0 và tại điểm M – . Trong trường hợp này, chúng tôi tin rằng khoảng thời gian Dt trong quá trình chuyển đổi từ điểm M 0 sang điểm M nhỏ đến mức có thể bỏ qua sự thay đổi về gia tốc về độ lớn và hướng.
Chúng ta hãy xem xét sự chuyển động của một điểm vật chất dọc theo quỹ đạo cong(Hình 2.11). Vectơ vận tốc tại một điểm bất kỳ của quỹ đạo có hướng tiếp tuyến với nó. Gọi vận tốc tại điểm M 0 và tại điểm M – . Trong trường hợp này, chúng tôi tin rằng khoảng thời gian Dt trong quá trình chuyển đổi từ điểm M 0 sang điểm M nhỏ đến mức có thể bỏ qua sự thay đổi về gia tốc về độ lớn và hướng.
 Vectơ thay đổi tốc độ. (TRONG trong trường hợp này hiệu của 2 vectơ sẽ bằng ). Chúng ta hãy phân tách vectơ, đặc trưng cho sự thay đổi tốc độ cả về độ lớn và hướng, thành hai thành phần và. Thành phần tiếp tuyến với quỹ đạo tại điểm M 0, đặc trưng cho sự thay đổi tốc độ về độ lớn trong thời gian Dt khi cung M 0 M đi qua và được gọi là tiếp tuyến thành phần của vectơ thay đổi vận tốc (). Vectơ có hướng trong giới hạn, khi Dt ® 0, dọc theo bán kính đến tâm, đặc trưng cho sự thay đổi tốc độ theo hướng và được gọi là thành phần pháp tuyến của vectơ thay đổi tốc độ ().
Vectơ thay đổi tốc độ. (TRONG trong trường hợp này hiệu của 2 vectơ sẽ bằng ). Chúng ta hãy phân tách vectơ, đặc trưng cho sự thay đổi tốc độ cả về độ lớn và hướng, thành hai thành phần và. Thành phần tiếp tuyến với quỹ đạo tại điểm M 0, đặc trưng cho sự thay đổi tốc độ về độ lớn trong thời gian Dt khi cung M 0 M đi qua và được gọi là tiếp tuyến thành phần của vectơ thay đổi vận tốc (). Vectơ có hướng trong giới hạn, khi Dt ® 0, dọc theo bán kính đến tâm, đặc trưng cho sự thay đổi tốc độ theo hướng và được gọi là thành phần pháp tuyến của vectơ thay đổi tốc độ ().
Do đó, vectơ thay đổi vận tốc bằng tổng hai vectơ ![]() .
.
Sau đó chúng ta có thể viết rằng
Khi Dt®0 giảm vô hạn, góc Da tại đỉnh DM 0 AC sẽ có xu hướng bằng 0. Khi đó vectơ có thể bị bỏ qua so với vectơ và vectơ
![]()
sẽ bày tỏ gia tốc tiếp tuyến và mô tả tốc độ thay đổi tốc độ chuyển động về độ lớn. Do đó, gia tốc tiếp tuyến bằng đạo hàm của mô đun vận tốc theo thời gian và có hướng tiếp tuyến với quỹ đạo.
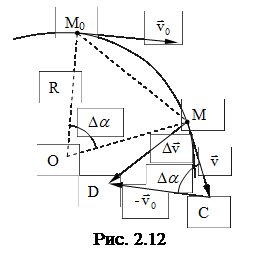
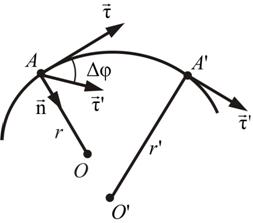
Bây giờ chúng ta hãy tính vectơ được gọi là gia tốc bình thường. Tại một Dt đủ nhỏ, phần quỹ đạo cong có thể được coi là một phần của đường tròn. Trong trường hợp này, bán kính cong M 0 O và MO sẽ bằng nhau và bằng bán kính của đường tròn R.
Hãy lặp lại bản vẽ. ĐM 0 OM = ĐMSD, giống như các góc có các cạnh vuông góc với nhau (Hình 2. 12). Đối với Dt nhỏ chúng ta có thể xét |v 0 |=|v|, do đó DM 0 OM = DMDC tương tự như tam giác cân Với góc giống nhauở trên cùng.
Vì vậy, từ Hình. 2.11 theo sau
 Þ ,
Þ ,
nhưng DS = v trung bình. ×Dt thì .
Đi đến giới hạn tại Dt ® 0 và tính đến điều đó trong trường hợp này v av. = v chúng tôi tìm thấy
 , tức là (2.5)
, tức là (2.5)
Bởi vì tại góc Dt ® 0 Da ® 0 thì hướng của gia tốc này trùng với hướng của bán kính cong R hoặc với hướng pháp tuyến của vận tốc, tức là. vectơ Vì vậy gia tốc này thường được gọi là hướng tâm. Nó đặc trưng cho tốc độ thay đổi tốc độ chuyển động theo hướng.
Gia tốc toàn phần được xác định bằng tổng vectơ của gia tốc tiếp tuyến và gia tốc pháp tuyến (Hình 2.13). Bởi vì các vectơ của các gia tốc này vuông góc với nhau thì mô đun của tổng gia tốc bằng  ; Hướng của gia tốc toàn phần được xác định bởi góc j giữa các vectơ và:
; Hướng của gia tốc toàn phần được xác định bởi góc j giữa các vectơ và:
Động học của chuyển động quay.
Vận tốc góc.
SỰ ĐỊNH NGHĨA: Chuyển động quay chúng ta sẽ gọi một chuyển động như vậy trong đó tất cả các điểm đều tuyệt đối chất rắn mô tả các đường tròn có tâm nằm trên một đường thẳng gọi là trục quay.
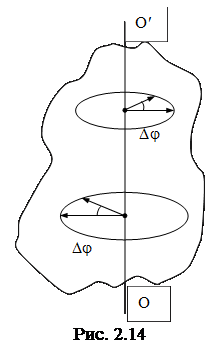 Là tọa độ xác định vị trí của một điểm trong quá trình chuyển động quay, lấy góc đặc trưng cho vị trí tức thời của vectơ bán kính vẽ từ tâm quay đến điểm đang xét (Hình 2.14)
Là tọa độ xác định vị trí của một điểm trong quá trình chuyển động quay, lấy góc đặc trưng cho vị trí tức thời của vectơ bán kính vẽ từ tâm quay đến điểm đang xét (Hình 2.14)
Để mô tả chuyển động quay, khái niệm được đưa ra vận tốc góc
Vectơ có hướng dọc theo trục mà vật quay theo hướng xác định quy tắc vít phải(Hình 2.15).
Độ lớn của vectơ vận tốc góc bằng . Nếu = const thì chuyển động như vậy được gọi là chuyển động đều, và do đó tại thời điểm t 0 = 0 chúng ta thu được .
Nếu như j 0 = 0 thì j = w t hoặc .
Như vậy, với chuyển động đều w cho biết góc quay của vật trong một đơn vị thời gian. Kích thước của vận tốc góc [ w]=rad/giây.
Chuyển động quay đều có thể được đặc trưng bởi chu kỳ quay T, được hiểu là thời gian mà cơ thể thực hiện một chuyển động quay. lượt đầy đủ, tức là quay một góc 2p. Trong trường hợp này, do đó.
Tần số quay (số vòng quay trên một đơn vị thời gian): n=1/T=w/2p. Do đó w=2pn.
Phụ lục 1.
Chuyển động quay của vật thể qua một góc nhỏ dj nhất định có thể được xác định dưới dạng một đoạn có chiều dài bằng dj và hướng trùng với trục mà chuyển động quay được thực hiện xung quanh. Vì vậy, sự quay của cơ thể có thể được quy cho một số giá trị số và phương hướng. Trong trường hợp này, hướng của vectơ có thể được xác định bằng cách liên hệ nó với hướng quay của vật. Các vectơ như vậy được gọi là trục hoặc vectơ giả, trái ngược với vectơ đúng hoặc vùng cực các vectơ mà hướng được xác định một cách tự nhiên ( , , v.v.), trong quá trình đảo ngược hệ tọa độ (x → -x', y → -y', z → -z'), vectơ sau thay đổi dấu của chúng thành ngược lại: .
Vectơ vận tốc góc có thể thay đổi cả do sự thay đổi tốc độ quay của vật quanh trục (trong trường hợp này nó thay đổi về độ lớn) và do sự quay của trục quay trong không gian (trong trường hợp này nó thay đổi theo phương hướng). Để mô tả tốc độ thay đổi, một đại lượng vật lý gọi là gia tốc góc.
SỰ ĐỊNH NGHĨA: Gia tốc góc trung bìnhđược gọi là đại lượng, trong đó Dt là khoảng thời gian mà vận tốc góc thay đổi.
SỰ ĐỊNH NGHĨA: Tăng tốc tức thìđược gọi là đại lượng bằng ;
Nếu hướng của trục quay trong không gian không đổi thì vận tốc góc chỉ thay đổi về độ lớn và trong trường hợp này  .
.
Nếu với e chúng ta muốn nói đến hình chiếu của vectơ lên hướng, thì công thức cuối cùng sẽ có dạng ![]() . Ở đây e là một đại lượng đại số và
. Ở đây e là một đại lượng đại số và
nếu w , thì e>0 (vectơ và một hướng),
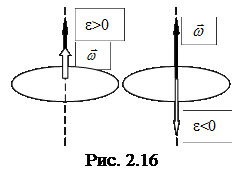 nếu w ¯ thì e<0 ( ¯ ).
nếu w ¯ thì e<0 ( ¯ ).
1) Nếu e>0 Þ chuyển động quay được tăng tốc đều ( ) (Hình 2.16).
2) Nếu e<0 – ( ¯ ) (рис. 2.16).
Trong hệ SI [e] = rad/s 2.
Đối với chuyển động có gia tốc đều:
Kể từ đây, w = w 0 + e (t - t 0). Tại t 0 = 0 ta được w = w 0 + e·t.
Cuối cùng
Bây giờ hãy cài đặt
Chuyển động của một điểm còn được đặc trưng bởi gia tốc—tốc độ thay đổi tốc độ. Nếu tốc độ của một điểm thay đổi một giá trị trong một khoảng thời gian tùy ý thì giá trị đó
Nó được gọi là gia tốc trung bình của điểm trong thời gian này. Tăng tốc trong ngay bây giờ thời gian:
những thứ kia. vectơ bằng đạo hàm theo thời gian. Hướng của vectơ trùng với hướng tăng tốc độ của . Vì, , gia tốc của một điểm có thể được viết dưới dạng đạo hàm bậc hai theo thời gian của vectơ bán kính:
Vectơ gia tốc có thể được mở rộng thành các thành phần: ![]() ; Ở đâu
; Ở đâu ![]() , tương ứng, ...phép chiếu gia tốc trên các trục tọa độ.
, tương ứng, ...phép chiếu gia tốc trên các trục tọa độ.
Nếu quỹ đạo của một điểm là một đường cong phẳng, thì để mô tả chuyển động, bạn có thể chọn hai hướng vuông góc với nhau: tiếp tuyến với quỹ đạo (ort) và pháp tuyến với nó (ort). Sau đó nó được phân hủy thành các thành phần.
Vì vectơ vận tốc nên thay ở đây vào độ dịch chuyển cơ bản ![]() , chúng tôi nhận được tốc độ: .
, chúng tôi nhận được tốc độ: .
Sau đó để tăng tốc điểm chúng ta có thể viết:
![]() ;
;
Từ hình. rõ ràng là có sự khác biệt giữa các vectơ và . Có thể thấy rằng có sự tăng dần vectơ đơn vị của tiếp tuyến với quỹ đạo, tương ứng với đường đi cơ bản trong thời gian.

| |
Khi di chuyển dọc theo một đoạn đường, vectơ đơn vị sẽ quay một góc. Từ một tam giác cân của vectơ ![]() , do kích thước nhỏ của nó;
, do kích thước nhỏ của nó;
Hướng trùng với vectơ đơn vị: khi vectơ vuông góc. Khi đó đạo hàm:
Và gia tốc tối đa của điểm
Từ đó có thể thấy rằng gia tốc tiếp tuyến (tiếp tuyến) đặc trưng cho tốc độ thay đổi mô đun vận tốc. Với chuyển động tăng tốc và trùng khớp, với chuyển động chậm và ngược lại.
Gia tốc bình thường đặc trưng cho tốc độ thay đổi theo hướng của vectơ vận tốc. Nó hướng về tâm cong của quỹ đạo; ; do đó nó còn được gọi là hướng tâm. Khi chuyển động thẳng.
Mô-đun tăng tốc đầy đủ
Trong quá trình chuyển động có gia tốc, góc nhọn, Hình 2. , trong chuyển động chậm - tù (góc giữa và ). Nếu một điểm chuyển động đều quanh một vòng tròn, tức là , thì và , tức là vuông góc với tiếp tuyến của quỹ đạo.
Động lực của chuyển động tịnh tiến
Chuyển động tiến về phía trước
Loại chuyển động cơ học đơn giản nhất của vật rắn là chuyển động tịnh tiến, trong đó một đường thẳng nối hai điểm bất kỳ của vật rắn sẽ chuyển động cùng với vật, giữ nguyên song song | về vị trí ban đầu của nó (một quả bóng trên một lò xo so với Trái đất, một piston trong xi lanh động cơ đứng yên, một thang máy, một máy tiện, v.v.). Quỹ đạo của tất cả các điểm trên cơ thể đều giống nhau. Bán kính - vectơ của tất cả các điểm trên cơ thể thay đổi như nhau theo thời gian, vận tốc của tất cả các điểm và gia tốc của chúng là như nhau:
; ![]()
những thứ kia. để mô tả chuyển động, bạn có thể lấy một điểm trên cơ thể; nếu cùng lúc đó, thì bằng cách lấy tích phân, chúng ta tìm được tốc độ của điểm:
; Sau đó, tích phân tốc độ, chúng ta tìm được tọa độ:
Định luật quán tính.
Cơ học cổ điển dựa trên ba định luật của Newton, được ông xây dựng trong tiểu luận “Các nguyên lý toán học của triết học tự nhiên” xuất bản năm 1687. Những định luật này là kết quả của sự khái quát hóa xuất sắc các dữ liệu thực nghiệm và các định luật lý thuyết trong lĩnh vực cơ học, được thiết lập bởi Newton, cũng như Kepler. Galileo, Huygens. Guk và cộng sự.
Là định luật đầu tiên của động lực học, Newton đã áp dụng định luật do Galileo thiết lập:
Mọi cơ thể đều duy trì trạng thái nghỉ ngơi hoặc đồng đều chuyển động thẳng cho đến khi tác động bên ngoài buộc trạng thái này phải thay đổi.
Định luật này phát biểu rằng trạng thái đứng yên hoặc chuyển động thẳng đều không yêu cầu ảnh hưởng bên ngoài. Điều này tiết lộ một đặc tính động học đặc biệt của vật thể gọi là quán tính. Do đó, định luật thứ nhất của Newton còn được gọi là định luật quán tính, và chuyển động của một vật khi không có tác dụng từ bên ngoài được gọi là chuyển động theo quán tính.
Trong công thức định luật này, người ta cho rằng vật thể không bị biến dạng, tức là nó hoàn toàn vững chắc và nó tiến về phía trước. Tuy nhiên, một vật rắn vẫn có thể quay đều theo quán tính và có gia tốc. Sự cần thiết của tất cả những sự dè dặt này sẽ biến mất nếu trong định luật thứ nhất của Newton, chúng ta không nói về một vật thể mà nói về một điểm vật chất, mà theo định nghĩa, không thể biến dạng cũng như không thể quay.
Do đó, đối với điểm vật chất, họ sử dụng công thức sau:
điểm vật chất duy trì trạng thái đứng yên hoặc chuyển động thẳng đều cho đến khi có tác động bên ngoài đưa nó ra khỏi trạng thái này.
Kích thước của không gian
Kích thước được hiểu là số lượng phép đo cần thực hiện để xác định rõ ràng vị trí của một điểm nhất định. Vì vậy, để xác định rõ ràng vị trí của một điểm trong không gian tại một thời điểm cố định, việc chỉ ra ba tọa độ của nó là cần thiết và đủ. Trong hệ tọa độ Descartes hình chữ nhật phổ biến nhất, đây là x, y, z - chiều dài, chiều rộng và chiều cao (Hình 5.2, α); trong hệ tọa độ cầu, bạn cần xác định vectơ bán kính r và các góc α và β (Hình 5.2, b); trong một hệ thống hình trụ - chiều cao h, vectơ bán kính r và góc α (Hình 5.2, V).
Người ta tin rằng tất cả các quá trình và tương tác vật chất được thực hiện chính xác trong không gian ba chiều. Trong không gian một chiều (đường) hoặc hai chiều (mặt phẳng), không thể xảy ra tương tác giữa hạt và trường. Ba chiều là mức tối thiểu cần và đủ để mọi loại tương tác của vật thể vật chất có thể xảy ra.
Hiện tại chưa có dạng chuyển động và tương tác nào đòi hỏi không gian bốn hoặc năm chiều và khả năng xảy ra các quá trình như vậy không tuân theo bất kỳ quy luật tự nhiên nào đã được thiết lập.
Có những cuộc thảo luận thường xuyên trong tài liệu về khả năng tồn tại của những không gian có nhiều chiều hơn. Vì vậy, gần đây một giả thuyết đã được đưa ra về 11 chiều thực trong thế giới vi mô vào những thời điểm đầu tiên khi Vũ trụ của chúng ta ra đời: 10 - không gian và đồng thời; sau đó chúng tạo thành một thể liên tục không-thời gian 4 chiều. Giả thuyết này có liên quan đến các trường hợp sau đây. Trong toán học và vật lý, khái niệm đa chiều ( N-không gian) có chiều. Sự trừu tượng toán học này đóng một vai trò quan trọng. Mỗi tọa độ của không gian đa chiều có thể biểu thị bất kỳ thuộc tính nào của thực tại vật lý đang được xem xét - nhiệt độ, mật độ, tốc độ, khối lượng, v.v. Nếu số lượng các tham số đó, cùng với các đặc điểm không gian, thời gian bằng P, khi đó chúng được coi là tạo thành một “không gian chiều” và các giá trị cụ thể của các thuộc tính được xác định là các điểm trong “không gian chiều”. Với số lượng đủ lớn các thuộc tính và các biến có liên quan với nhau, người ta có thể đi đến khái niệm không gian đa chiều, thậm chí là vô hạn chiều. Tuy nhiên, khái niệm không gian ở đây mang tính chất có điều kiện, vì nó được dùng để mô tả các thuộc tính hoàn toàn khác nhau.
Kích thước của thời gian
Đối với tính chiều của thời gian, họ thường chỉ vào tính một chiều của nó: để xác định thời gian, chỉ cần xác định một tọa độ là đủ. Theo S.T. Melyukhina, nếu thời gian không phải là một mà là hai, ba hoặc nhiều chiều, thì điều này có nghĩa là song song với thế giới của chúng ta, có những thế giới tương tự và không có mối liên hệ nào với thế giới song sinh của chúng ta, trong đó các sự kiện giống nhau diễn ra theo cùng một trình tự. Theo đó, mỗi người sẽ phải có những nhân đôi ở mỗi thế giới song song. Nhưng không có cơ sở cho những giả định như vậy.
Một quan điểm khác được chia sẻ bởi nhà địa lý người Nga Yu.G. Simonov. Ông tin rằng hoàn toàn có thể đề xuất một mô hình thời gian hai chiều hữu ích cho việc mô tả và nghiên cứu một loại sự kiện nhất định, đồng thời kiểm tra nó bằng cách sử dụng ví dụ về một số hiện tượng địa lý. Ở đây chúng ta nên nhớ về hai loại thời gian - mặt trời và mặt trăng. Nhiều sự kiện khác nhau có thể liên quan đến các giai đoạn của lịch mặt trăng và mặt trời. Được biết, các vectơ thời gian này độc lập và lệch pha và chu kỳ của chúng không phải là bội số của nhau. Như vậy, khi nghiên cứu các hiện tượng trên Trái đất, người ta có thể tìm thấy trong số đó những hiện tượng chỉ liên quan đến trường hấp dẫn Trái đất - Mặt trăng và Trái đất - Mặt trời. Các trường này có thể chồng lên nhau, có khi cộng, có khi trừ. Trong trường hợp này, chúng ta có thể nói về việc nghiên cứu hệ hấp dẫn gồm ba vật thể. Trong hệ thống như vậy, số vectơ thời gian trùng với số bậc tự do. Cho trục nằm trong không gian của hai vectơ thời gian X trùng với vectơ thời gian mặt trời và trục y - với mặt trăng. Trong giai đoạn trăng non, các lực hấp dẫn của mặt trăng và mặt trời được thêm vào, và trong giai đoạn trăng tròn, chúng bị trừ đi. Do đó, trong giai đoạn trăng non, Trái đất và Mặt trời chịu sự nhiễu loạn hấp dẫn tối đa, và trong giai đoạn trăng tròn, Mặt trăng và Mặt trời chịu sự nhiễu loạn hấp dẫn tối đa; Cường độ hấp dẫn tối thiểu của Trái đất xảy ra vào lúc trăng tròn, khi trường hấp dẫn bị trừ đi. Do đó, trên Trái đất, lực hấp dẫn tăng dần từ trăng tròn đến trăng non, sau đó giảm dần. Khi sóng hấp dẫn tăng lên, một số hiệu ứng sẽ phát sinh và trên nền tảng của sự giảm (giảm) lực căng, những hiệu ứng khác sẽ xảy ra. Như vậy, các vết nứt kiến tạo bị nén lại và giãn nở theo các pha khác nhau; các quá trình liên quan đến áp lực khe nứt lỗ rỗng của nước dưới đất xảy ra với cường độ khác nhau...
Trong trường hợp tổng quát, theo Simonov, có thể không phải hai mà có nhiều vectơ thời gian hơn. Việc lựa chọn mô hình thời gian đa chiều (đặc biệt là xác định số lượng vectơ thời gian) có thể được thực hiện khá đơn giản trong trường hợp các quá trình đang được nghiên cứu độc lập với nhau về mặt nhân quả và chúng có thể được hình dung là biểu hiện theo chu kỳ, và các chu kỳ có thể kéo dài không phải hàng giờ, hàng ngày mà trong nhiều năm, nhiều thế kỷ và thậm chí nhiều thiên niên kỷ.
Tăng tốc
Tăng tốc là đại lượng đặc trưng cho tốc độ thay đổi tốc độ.
Ví dụ, khi một chiếc ô tô bắt đầu chuyển động, tốc độ của nó tăng lên, tức là nó chuyển động nhanh hơn. Lúc đầu tốc độ của nó bằng không. Sau khi di chuyển, xe tăng tốc dần dần đến một tốc độ nhất định. Nếu đèn giao thông màu đỏ bật sáng trên đường, ô tô sẽ dừng lại. Nhưng nó sẽ không dừng lại ngay lập tức mà theo thời gian. Tức là tốc độ của nó sẽ giảm xuống 0 - ô tô sẽ chuyển động chậm cho đến khi dừng hẳn. Tuy nhiên, trong vật lý không có thuật ngữ “sự chậm lại”. Nếu một vật chuyển động chậm lại thì đây cũng sẽ là một gia tốc của vật đó, chỉ trừ dấu trừ (bạn nhớ nhé, tốc độ
- Cái này lượng vectơ).
Gia tốc trung bình
Gia tốc trung bình> là tỷ số của sự thay đổi tốc độ trong khoảng thời gian xảy ra sự thay đổi này. Gia tốc trung bình có thể được xác định theo công thức:
Ở đâu - vectơ gia tốc.
Hướng của vectơ gia tốc trùng với hướng thay đổi tốc độ Δ = - 0 (ở đây 0 là tốc độ ban đầu, tức là tốc độ mà cơ thể bắt đầu tăng tốc).
Tại thời điểm t1 (xem Hình 1.8) vật có tốc độ bằng 0. Tại thời điểm t2 vật có vận tốc . Theo quy tắc trừ vectơ ta tìm được vectơ thay đổi vận tốc Δ = - 0. Sau đó, bạn có thể xác định gia tốc như thế này:
Cơm. 1.8. Gia tốc trung bình.
trong SI đơn vị tăng tốc– là 1 mét trên giây trên giây (hoặc mét trên giây bình phương), nghĩa là
Mét trên giây bình phương bằng gia tốcđiểm chuyển động thẳng, trong 1 giây vận tốc của điểm này tăng thêm 1 m/s. Nói cách khác, gia tốc xác định tốc độ của vật thể thay đổi bao nhiêu trong một giây. Ví dụ, nếu gia tốc là 5 m/s 2 thì điều này có nghĩa là tốc độ của vật tăng thêm 5 m/s mỗi giây.
Gia tốc tức thời của một vật (điểm vật chất) tại một thời điểm nhất định là một đại lượng vật lý, bằng giới hạn, mà gia tốc trung bình có xu hướng tiến tới khi khoảng thời gian tiến tới bằng không. Nói cách khác, đây là khả năng tăng tốc mà cơ thể phát triển trong một khoảng thời gian rất ngắn:
Hướng gia tốc cũng trùng với hướng thay đổi tốc độ Δ đối với các giá trị rất nhỏ của khoảng thời gian xảy ra sự thay đổi tốc độ. Vectơ gia tốc có thể được xác định bằng các phép chiếu lên các trục tọa độ tương ứng trong một hệ quy chiếu cho trước (các phép chiếu a X, a Y, a Z).
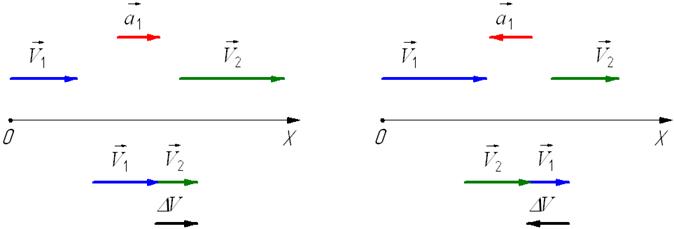
Với chuyển động thẳng có gia tốc, tốc độ của vật tăng theo giá trị tuyệt đối, tức là
V 2 > v 1
và hướng của vectơ gia tốc trùng với vectơ vận tốc 2.
Nếu vận tốc của vật giảm về giá trị tuyệt đối thì đó là
V 2< v 1
thì hướng của vectơ gia tốc ngược với hướng của vectơ vận tốc 2. Nói cách khác, trong trường hợp này điều xảy ra là chậm lại, trong trường hợp này gia tốc sẽ âm (và< 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
Cơm. 1.9. Tăng tốc tức thời.
Khi di chuyển dọc theo một đường cong, không chỉ mô-đun tốc độ mà cả hướng của nó cũng thay đổi. Trong trường hợp này, vectơ gia tốc được biểu diễn dưới dạng hai thành phần (xem phần tiếp theo).
Gia tốc tiếp tuyến
Gia tốc tiếp tuyến (tiếp tuyến) là thành phần của vectơ gia tốc hướng dọc theo tiếp tuyến với quỹ đạo tại một điểm nhất định của quỹ đạo chuyển động. Gia tốc tiếp tuyến đặc trưng cho sự thay đổi mô đun tốc độ trong chuyển động cong.
Cơm. 1.10. Gia tốc tiếp tuyến.
Hướng của vectơ gia tốc tiếp tuyến τ (xem Hình 1.10) trùng với hướng của vận tốc tuyến tính hoặc ngược chiều với hướng đó. Nghĩa là vectơ gia tốc tiếp tuyến nằm trên cùng một trục với đường tròn tiếp tuyến, đó là quỹ đạo của vật.
Tăng tốc bình thường
Gia tốc bình thường là thành phần của vectơ gia tốc hướng dọc theo đường pháp tuyến của chuyển động tại một điểm nhất định trên quỹ đạo của vật thể. Nghĩa là, vectơ gia tốc pháp tuyến vuông góc với tốc độ chuyển động tuyến tính (xem Hình 1.10). Gia tốc bình thường đặc trưng cho sự thay đổi tốc độ theo hướng và được ký hiệu bằng chữ n. Vectơ gia tốc pháp tuyến hướng dọc theo bán kính cong của quỹ đạo.
Tăng tốc hoàn toàn
Gia tốc toàn phần trong chuyển động cong là tổng của gia tốc tiếp tuyến và gia tốc pháp tuyến dọc theo quy tắc cộng vector và được xác định theo công thức:
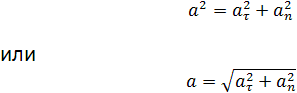
(theo định lý Pythagore cho hình chữ nhật).
Hướng của gia tốc toàn phần cũng được xác định quy tắc cộng vector : = τ + n
Gia tốc tiếp tuyến (tiếp tuyến) là thành phần của vectơ gia tốc hướng dọc theo tiếp tuyến với quỹ đạo tại một điểm cho trước của quỹ đạo chuyển động. Gia tốc tiếp tuyến đặc trưng cho sự thay đổi mô đun tốc độ trong chuyển động cong.
Phương hướng vectơ gia tốc tiếp tuyến Một nằm trên cùng một trục với đường tròn tiếp tuyến, đó là quỹ đạo của vật.
Tăng tốc bình thường- đây là thành phần của vectơ gia tốc hướng dọc theo đường pháp tuyến của chuyển động tại một điểm nhất định trên quỹ đạo của vật thể.
 Vectơ
vuông góc với tốc độ chuyển động tuyến tính, hướng dọc theo bán kính cong của quỹ đạo.
Vectơ
vuông góc với tốc độ chuyển động tuyến tính, hướng dọc theo bán kính cong của quỹ đạo.
Công thức tính tốc độ cho chuyển động có gia tốc đều
Tiến bộ và chuyển động quay cơ thể rắn chắc.
Chuyển động tiến về phía trước
- là chuyển động trong đó tất cả các điểm của cơ thể đều chuyển động theo cùng một quỹ đạo.
Có hai loại chuyển động về phía trước: đều và không đều.
Chuyển động quay là chuyển động của vật thể quanh một trục nhất định. Với chuyển động như vậy, tất cả các điểm của cơ thể sẽ chuyển động theo vòng tròn, tâm của nó là trục này.
Vận tốc góc. Gia tốc góc .
Vận tốc góc - đại lượng vectơ, là vectơ giả (vectơ trục) và đặc trưng cho tốc độ quay của một điểm vật chất xung quanh tâm quay. Vectơ vận tốc góc có độ lớn bằng góc phép quay một điểm quanh tâm quay trong một đơn vị thời gian:
![]()
Gia tốc góc - đại lượng vật lý giả vectơ bằng đạo hàm bậc nhất của giả vectơ vận tốc góc theo thời gian
Gia tốc góc đặc trưng cho cường độ thay đổi mô đun và hướng của vận tốc góc trong quá trình chuyển động của một vật rắn
![]()
Mối liên hệ giữa vận tốc tuyến tính với vận tốc góc và gia tốc tiếp tuyến với vận tốc góc.
Các điểm riêng lẻ của vật thể quay có vận tốc tuyến tính khác nhau. Vận tốc của mỗi điểm hướng tiếp tuyến với vòng tròn tương ứng, liên tục thay đổi hướng của nó. Độ lớn của tốc độ được xác định bởi tốc độ quay của vật và khoảng cách R từ điểm được đề cập đến trục quay. Để vật quay một góc trong thời gian ngắn (Hình 2.4). Một điểm cách trục một khoảng R có quãng đường bằng
Tốc độ tuyến tínhđiểm theo định nghĩa.
Định luật đầu tiên của Newton (hoặc định luật quán tính)
Có những hệ quy chiếu như vậy mà các vật thể chuyển động tịnh tiến cô lập giữ được tốc độ của chúng không thay đổi về độ lớn và hướng.
Hệ quán tínhđếm ngược là một hệ quy chiếu mà trong đó một điểm vật chất, không chịu ảnh hưởng từ bên ngoài, đứng yên hoặc chuyển động thẳng và đều (tức là với tốc độ không đổi).
Trong tự nhiên có bốn kiểu tương tác
1. Lực hấp dẫn (lực hấp dẫn) là sự tương tác giữa các vật thể có khối lượng.
2. Điện từ - đúng đối với các vật mang điện, chịu trách nhiệm về các lực cơ học như ma sát và độ đàn hồi.
3. Tương tác mạnh - tầm ngắn, nghĩa là nó tác dụng ở khoảng cách bằng kích thước hạt nhân.
4. Yếu. Tương tác như vậy chịu trách nhiệm cho một số loại tương tác giữa các hạt cơ bản, đối với một số loại phân rã β và đối với các quá trình khác xảy ra bên trong nguyên tử, hạt nhân nguyên tử.
Cân nặng - là đặc điểm định lượng tính chất trơ của cơ thể. Nó cho thấy cơ thể phản ứng như thế nào với những tác động bên ngoài.
Sức mạnh - là thước đo định lượng về tác động của cơ thể này lên cơ thể khác.
Định luật thứ hai của Newton.
Lực tác dụng lên cơ thể bằng tích của khối lượng cơ thể và gia tốc do lực này truyền: F=ma
Đo bằng
Đại lượng vật lý, tương đương với sản phẩm khối lượng cơ thể với tốc độ chuyển động của nó được gọi là xung cơ thể (hoặc lượng chuyển động). Động lượng của một vật là một đại lượng vectơ. Đơn vị SI của xung là kilôgam-mét trên giây (kg m/s).
Biểu thức định luật II Newton thông qua sự biến đổi động lượng của một vật
Chuyển động đồng đều – đây là chuyển động có tốc độ không đổi, nghĩa là khi tốc độ không thay đổi (v = const) và không xảy ra hiện tượng tăng tốc hoặc giảm tốc (a = 0).
Chuyển động thẳng - đây là chuyển động thẳng, tức là quỹ đạo của chuyển động thẳng là đường thẳng.
Chuyển động có gia tốc đều - chuyển động trong đó gia tốc không đổi về độ lớn và hướng.