Układ sił nazywa się zrównoważony, jeśli pod wpływem tego układu ciało pozostaje w spoczynku.
Warunki równowagi:
Pierwszy warunek równowagi solidny:
Aby ciało stałe znajdowało się w równowadze, konieczna jest suma siły zewnętrzne, przyłożony do ciała, był równy zeru.
Drugi warunek równowagi ciała sztywnego:
Kiedy ciało sztywne znajduje się w równowadze, suma momentów wszystkich sił zewnętrznych działających na nie względem dowolnej osi jest równa zeru.
Ogólny warunek równowagi ciała sztywnego:
Aby ciało sztywne znajdowało się w równowadze, suma sił zewnętrznych i suma momentów sił działających na ciało musi wynosić zero. Musi także wynosić zero prędkość początkowaśrodek masy i prędkość kątowa rotacja ciała.
Twierdzenie. Trzy siły równoważą ciało sztywne tylko wtedy, gdy wszystkie leżą w tej samej płaszczyźnie.
11. Układ sił płaskich– są to siły zlokalizowane w jednej płaszczyźnie.
Trzy formy równań równowagi dla układu płaskiego:
Środek ciężkości ciała.
Środek ciężkości Ciało o skończonych wymiarach nazywa się punktem, wokół którego suma momentów ciężkości wszystkich cząstek ciała jest równa zeru. W tym momencie działa siła ciężkości ciała. Środek ciężkości ciała (lub układu sił) zwykle pokrywa się ze środkiem masy ciała (lub układu sił).
Środek ciężkości płaska figura:
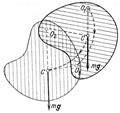
Praktyczny sposób znalezienie środka masy płaskiej figury: zawieś ciało w polu grawitacyjnym tak, aby mogło swobodnie obracać się wokół punktu zawieszenia O1 . W równowadze środek masy Z znajduje się na tej samej pionie co punkt zawieszenia (poniżej), ponieważ równy zeru
moment ciężkości, który można uznać za wywierany w środku masy. Zmieniając punkt zawieszenia, w ten sam sposób znajdujemy kolejną linię prostą O2C , przechodząc przez środek masy. Położenie środka masy wyznacza punkt ich przecięcia.
Prędkość środka masy:
Pęd układu cząstek równy produktowi masy całego układu M= Σmi od prędkości jego środka masy V :
![]()
Środek masy charakteryzuje ruch układu jako całości.
15. Tarcie ślizgowe– tarcie podczas względnego ruchu stykających się ciał.
Tarcie statyczne– tarcie przy braku względnego ruchu stykających się ciał.
Przesuwająca się siła tarcia Ftr pomiędzy powierzchniami stykających się ciał podczas ich względnego ruchu zależy od siły reakcji normalnej N lub od siły normalnego ciśnienia Pn , I Ftr=kN Lub Ftr=kPn , gdzie k – współczynnik tarcia ślizgowego , w zależności od tych samych czynników, co współczynnik tarcia statycznego k0 , a także od prędkości względnego ruchu stykających się ciał.
16. Tarcie toczne- Jest to przetaczanie się jednego ciała nad drugim. Siła tarcia ślizgowego nie zależy od wielkości powierzchni trących, a jedynie od jakości powierzchni ciał trących oraz od siły, która zmniejsza powierzchnie trące i jest do nich skierowana prostopadle. F=kN, Gdzie F- siła tarcia, N– wielkość reakcji normalnej i k – współczynnik tarcia ślizgowego.
17. Równowaga ciał przy tarciu- jest to maksymalna siła przyczepności proporcjonalna do normalnego nacisku ciała na płaszczyznę.
Kąt pomiędzy naniesioną całkowitą reakcją Największa siła nazywa się tarciem dla danej reakcji normalnej i kierunkiem reakcji normalnej kąt tarcia.
Stożek z wierzchołkiem w miejscu przyłożenia reakcji normalnej na chropowatą powierzchnię, którego tworząca tworzy z tą powierzchnią kąt tarcia normalna reakcja, zwany stożek tarcia.
Dynamika.
1. W dynamika rozważany jest wpływ oddziaływań pomiędzy ciałami na ich ruch mechaniczny.
Waga- to charakterystyka malarska punktu materialnego. Masa jest stała. Masa jest przymiotnikowa (dodatek)
Siła - jest to wektor, który całkowicie charakteryzuje interakcję znajdującego się na nim punktu materialnego z innymi punktami materialnymi.
Punkt materialny– ciało, którego wymiary i kształt nie mają znaczenia w rozpatrywanym ruchu (np. w ruchu postępowym ciało sztywne można uznać za punkt materialny)
System materiału kropki tzw pęczek punkty materialne, wchodząc ze sobą w interakcję.
I zasada Newtona: każdy punkt materialny utrzymuje stan spoczynku lub jednolity ruch prostoliniowy dopóki wpływy zewnętrzne nie zmieni tego stanu.
II zasada Newtona: przyspieszenie uzyskane przez punkt materialny w układ inercyjny odniesienie, wprost proporcjonalne do siły działającej na punkt, odwrotnie proporcjonalne do masy punktu, a kierunek pokrywa się z siłą: a=F/m
Trzecie prawo Newtona: siły oddziaływania pomiędzy dwoma punktami materialnymi w inercjalnym układzie odniesienia są równe pod względem wielkości i skierowane w przeciwnych kierunkach : Fik= - Fki
Czy wiedziałeś, jaka jest fałszywość koncepcji ” próżnia fizyczna"?
Fizyczna próżnia - koncepcja relatywistyczna Fizyka kwantowa, przez co rozumieją najniższy (podstawowy) stan energetyczny skwantowanego pola, który ma zerowy pęd, moment pędu i inne liczby kwantowe. Teoretycy relatywistyczni nazywają próżnię fizyczną przestrzenią całkowicie pozbawioną materii, wypełnioną niemierzalnym, a zatem jedynie urojonym, polem. Stan taki, zdaniem relatywistów, nie jest absolutną pustką, ale przestrzenią wypełnioną jakimiś fantomowymi (wirtualnymi) cząsteczkami. Relatywistyczny teoria kwantowa pól stwierdza, że zgodnie z zasadą nieoznaczoności Heisenberga cząstki wirtualne, czyli pozorne (dla kogo?) nieustannie rodzą się i znikają w próżni fizycznej: występują tak zwane oscylacje pola punktu zerowego. Wirtualne cząstki próżni fizycznej, a zatem sama próżnia z definicji nie mają układu odniesienia, gdyż w W przeciwnym razie Naruszona zostałaby zasada względności Einsteina, na której opiera się teoria względności (czyli możliwy stałby się absolutny system pomiaru w odniesieniu do cząstek próżni fizycznej, co z kolei jednoznacznie obaliłoby zasadę względności, na której opiera się teoria względności). opiera się na STR). Zatem próżnia fizyczna i jej cząsteczki nie są pierwiastkami świat fizyczny, a jedynie elementy teorii względności, które w niej nie istnieją prawdziwy świat, ale tylko w formułach relatywistycznych, naruszających zasadę przyczynowości (powstają i znikają bez przyczyny), zasadę obiektywności ( cząstki wirtualne można uwzględnić, w zależności od chęci teoretyka, istniejące lub nieistniejące), zasadę faktograficznej mierzalności (nieobserwowalne, nie posiadające własnego ISO).
Kiedy ten czy inny fizyk posługuje się pojęciem „próżni fizycznej”, albo nie rozumie absurdalności tego terminu, albo jest nieszczery, będąc ukrytym lub jawnym zwolennikiem ideologii relatywistycznej.
Absurdalność tej koncepcji najłatwiej zrozumieć, sięgając do początków jej powstania. Został narodzony przez Paula Diraca w latach trzydziestych XX wieku, kiedy stało się jasne, że odmowa eteru czysta forma jak to zrobiłem wielki matematyk, ale przeciętnego fizyka, nie jest już możliwe. Zbyt wiele faktów temu zaprzecza.
W obronie relatywizmu Paul Dirac wprowadził koncepcję afizyczną i nielogiczną negatywna energia, a następnie istnienie „morza” dwóch energii kompensujących się w próżni – dodatniej i ujemnej, a także „morza” kompensujących się cząstek – wirtualnych (czyli pozornych) elektronów i pozytonów w próżni próżnia.
W statyce, a także w kinematyce (poz. 51) ciało sztywne jest układem punktów materialnych niezmiennie ze sobą połączonych. Układ ten jest zatem ciałem absolutnie sztywnym, którego punkty pozostają w stałej odległości od siebie, niezależnie od sił działających na te punkty i niezależnie od ruchu ciała.
Tak zdefiniowane ciało jest oczywiście idealizacją. Przede wszystkim fizyka uczy nas, że ciała stałe składają się z cząsteczek, które same w sobie mają bardzo dużo złożona struktura i można je znaleźć w szerokiej gamie ukrytych ruchów. To właśnie o cząsteczkach zajętych w swoich średnich pozycjach można powiedzieć, że w nich pozostają w dużej mierze zbliżając się tym samym
w takich samych odległościach od siebie. Zatem możemy tutaj patrzeć na cząsteczki w ich średnich pozycjach jako na punkty materialne. Ale to nie wszystko; nawet jeśli zaniedbamy te ukryte ruchy molekularne i zwracaj uwagę tylko na widzialne ruchy cząstek, to nawet wtedy wszystkie ciała natury zmieniają swój kształt pod wpływem przyłożonych do nich sił; siły wewnętrzne działające pomiędzy cząstkami tego samego ciała zależą, jak wiemy (pkt 109), od tych odkształceń. Ponieważ jednak odkształcenia ciał zwanych w fizyce „stałymi” są bardzo małe, można je w pierwszym przybliżeniu pominąć, chyba że siły przyłożone do ciał są zbyt duże i jeśli nie badamy siły wewnętrzne. Wyznaczanie sił wewnętrznych i widocznych odkształceń zachodzących w ciałach stałych trudne zadanie, która nie dotyczy już statyki, ale teorii sprężystości. Teoria, którą przedstawimy w celu większa dokładność ma zastosowanie do ciał stałych ciała fizyczne, tym bardziej zbliżają się do ciała absolutnie stałego.
Z logicznego punktu widzenia statykę geometryczną ciała sztywnego należy uznać za teorię graniczną. Ona wyrusza znany numer prawa ogólne, mający zastosowanie do wszystkich ciał stałych, niezależnie od ich struktura molekularna i ich właściwości sprężyste, jeśli tylko odkształcenia można uznać za nieskończenie małe. Jednak tak skonstruowana teoria jest niekompletna teoria równowagi, ponieważ systematycznie pomija właściwości sprężyste, których zaangażowanie w niektórych przypadkach staje się absolutnie konieczne. W takich przypadkach metody statyki geometrycznej okazują się niewystarczające, aby rozwiązać wszystkie pytania, jakie może nam postawić problem równowagi. Niektóre z tych pytań mogą nawet okazać się sprzeczne, jeśli zachowamy hipotezę o absolutnej niezmienności ciała stałego.
Sam warunek nieodkształcalności nie wystarczy do uzasadnienia teorii równowagi ciał stałych;
do tego należy dodać, jako uzupełnienie definicji ciała sztywnego, następujący postulat mechaniczny:
Postulat. - Nie zmieniając niczego w warunkach równowagi ciała sztywnego, możesz dodać lub odrzucić dwie równe i bezpośrednio przeciwne siły przyłożone do dwóch jego punktów.
Z tego można wyprowadzić postulat ogólna zasada, znaną jako zasada wirtualnych ruchów, ale na razie nie będziemy tego robić. Wspomnianą zasadę ustalimy w jednym z kolejnych rozdziałów jako podstawę statystyki analitycznej. Bezużyteczne byłoby także wprowadzanie tego postulatu, jeśli przyjmiemy podstawowe prawa dynamiki w postaci, w jakiej je przedstawiliśmy w poprzedniej części kursu, gdyż omawiany postulat, jak zobaczymy później, jest prostym szczególny przypadek jeden ogólne twierdzenie dynamika ciała sztywnego. Jeśli go tutaj wprowadzimy, zrobimy to w celu zachowania charakteru statycznego niezależna dyscyplina. Przyjrzymy się temu postulatowi z punktu widzenia fizyki jako bezpośredniej konsekwencji doświadczenia; z tego samego punktu widzenia mechanika teoretyczna potraktujemy to jako uzupełnienie przyjętej w statyce definicji ciała stałego, z tą korzyścią, że uwolnieni jesteśmy od wprowadzania hipotezy molekularnej.
Jak już zauważono w teorii wektorów (pkt 28), z tego podstawowego postulatu wynika w konsekwencji następujące twierdzenie:
Nie naruszając warunków równowagi ciała sztywnego, można przenieść punkt przyłożenia siły na dowolny punkt jego linii działania, o ile to nowy punkt był połączony z ciałem.
Jest rzeczą oczywistą, że to zdanie mówi tylko o stanie równowagi organizmu, a nie o jego skutkach różne punkty ciała, ponieważ te działania wewnętrzne, oczywiście ulegnie zmianie, gdy punkt przyłożenia określonej siły
operację można wykonać np. po umieszczeniu sztywnego korpusu na jakichś podporach, ale w żadnym wypadku nie można powiedzieć, że przeniesienie siły w tym przypadku nie zmieni reakcji podpór. Byłoby zatem duży błąd zastosować zasadę przenoszenia siły przy określaniu reakcji podpór, przenosząc na przykład jedną lub drugą z przyłożonych sił na punkt podparcia. Jedynymi warunkami, które można w tym przypadku zasadnie zastosować, są warunki równowagi ogólnej, ponieważ te ostatnie są zawsze warunkami koniecznymi.
185. Redukcja sił działających na ciało sztywne (punkt widzenia statycznego).
Widzieliśmy właśnie, że można bez zakłócania równowagi ciała sztywnego wykonać następujące operacje na siłach przyłożonych do punktów ciała:
1°. Dodanie lub rozszerzenie sił przyłożonych w jednym punkcie.
2°. Dodawanie lub odejmowanie dwóch równych i bezpośrednio przeciwnych sił.
3°. Przeniesienie siły do dowolnego punktu na linii działania.
Operacje te, jak ustalono w teorii wektorów (pkt 29), są właśnie tymi operacjami elementarnymi, które umożliwiają sprowadzenie do siebie dwóch równoważnych układów wektorów. Otrzymujemy z tego następujące twierdzenie:
Nie naruszając równowagi ciała sztywnego, można zastąpić dowolny układ sił działających na to ciało innym układem sił, będącym układem wektorów równoważnym pierwszemu.
Takie dwa układy sił nazywane są równoważnymi.
Zadanie sprowadzenia układu sił przyłożonych do ciała sztywnego pokrywa się zatem z zadaniem sprowadzenia układu wektorów, stąd możemy wyciągnąć następujące wnioski:
1°. Redukcja do dwóch sił. Układ sił przyłożonych do ciała sztywnego można przedstawić jako
brak równowagi, tylko do dwóch sił, z których jedna jest przyłożona w dowolnie wybranym punkcie ciała (poz. 26).
2°. Doprowadzenie do siły i zjednoczenie. Układ sił przyłożonych do ciała stałego można sprowadzić bez naruszania równowagi do jednej siły przyłożonej dowolny punkt O ciałach i do jednej pary. Siła jest wypadkową R wszystkich sił układu przeniesionych do punktu O (wektor główny), a moment pary jest równy głównemu momentowi O układu sił względem tego samego punktu (poz. 24).
Aby układ sił został zredukowany do jednego wypadkowego R, konieczne i wystarczające jest, aby dla dowolnie przyjętego środka redukcji O suma geometryczna R było niezerowe, a powstały moment G (jeśli nie jest zerowy) był prostopadły do R. Wynikowa w tym przypadku jest skierowana wzdłuż Centralna oś systemy.
Aby układ został zredukowany do jednej pary, konieczne i wystarczające jest, aby wektor główny R był równy zeru, a moment główny O był różny od zera. W tym przypadku moment główny układu jest taki sam dla każdego punktu przestrzeni.
Wreszcie, jeśli wektory R i G są równe zeru, wówczas układ jest równoważny zeru i ciało będzie w równowadze. Rozważymy ten przypadek w następnym akapicie.
Siły w płaszczyźnie. - Gdy wszystkie siły działają w jednej płaszczyźnie, a suma geometryczna ich R nie jest równa zero, powstały moment G (jak również moment każdej siły) jest prostopadły do R. W rezultacie siły te sprowadzają się do jednej wypadkowej R przyłożony w punkcie na osi środkowej (który oczywiście leży w płaszczyźnie działania sił). Jeśli R jest równe zero, to układ sprowadza się do jednej pary, a jeśli dodatkowo G jest równe zero, to układ jest w równowadze.
Warto zauważyć, że każdy płaski układ sił można zawsze zredukować do dwóch sił, przym. wyrażone w dwóch danych punktach A i płaszczyźnie,
W rzeczywistości każda siła t przyłożona w punkcie O leżącym poza linią AB rozkłada się w kierunkach OA i OB na dwie składowe, które można przenieść do punktów A i B. Jeżeli punkt O przyłożenia siły leży na AB i linię działania siły przechodzącą przez A, wówczas można przenieść punkt przyłożenia siły; jeśli linia działania siły nie przechodzi przez A, to punkt przyłożenia siły można przenieść wzdłuż linii działania poza linię AB, co prowadzi do pierwszego przypadku.
Siły równoległe. - Jeżeli siły są równoległe, a ich suma geometryczna R nie jest równa zeru, to powstały moment G jest prostopadły do R i w związku z tym siły te sprowadzają się do jednego wypadkowego R przyłożonego w punkcie osi środkowej (równoległej do ogólny kierunek wytrzymałość). Jeżeli R jest równe zero, to układ zostaje zredukowany do jednej pary lub znajduje się w równowadze (gdy moment pary wynosi zero).
186. Równowaga ciała sztywnego.
Dla równowagi swobodnego ciała sztywnego konieczne i wystarczające jest, aby układ przyłożonych do niego sił (tj. w tym przypadku, siły zewnętrzne) była równa zeru.
Wiemy już, że ten warunek jest konieczny, ponieważ reprezentuje ogólne warunki balansować.
Dla ciała stałego również okazuje się wystarczające. W rzeczywistości, jeśli układ sił jest równy zeru, można go zredukować do zera za pomocą operacji elementarnych, a zatem wszystkie siły, które się na niego składają, można po prostu odrzucić. Na tej podstawie mamy dwa warunki równowagi w postaci wektorowej
Warunki te są podzielone na sześć równania algebraiczne. Niech X, Y, Z będą rzutami wektora R na trzy osie prostokątne współrzędne, czyli suma rzutów wszystkich sił na tę samą oś; niech dalej L, M,
Wynikowe momenty układu tych sił względem tych samych osi; wówczas te sześć równań będzie wyglądało następująco:
Często mówi się, że pierwsze trzy równania (równoważne R = 0) reprezentują warunki równowagi ruch do przodu, a trzy ostatnie (równoważne równości G = 0) to warunki równowagi rotacji. Podstawę dla takich nazw otrzymamy później, gdy zastosujemy zasadę pracy wirtualnej do rozwiązania tego samego problemu.
187. Redukcja sił działających na ciało sztywne (punkt widzenia dynamicznego). Równowaga dynamiczna.
W dynamice ciała sztywnego pokażemy, że w przypadku swobodnego ciała sztywnego jego ruch będzie całkowicie określony, jeśli dla każdego momentu czasu wektor główny i moment główny względem jakiegoś punktu wszystkich przyłożonych do niego sił są podane. Stąd mamy następujące twierdzenie:
Jeżeli dwa układy sił przyłożonych do ciała sztywnego są sobie stale równoważne z punktu widzenia teorii wektorów, to będą równoważne z punktu widzenia ruchu ciała.
Twierdzenie to zasadniczo odnosi się do dynamiki, ale jest również ściśle powiązane ze statyką geometryczną. Rzeczywiście można to udowodnić za pomocą bardzo prostego uogólnienia postulatu głównego, które wyjaśnia definicję ciała sztywnego w statyce (pkt 184).
Właściwie zastąpmy ten postulat następującym:
Nie zmieniając niczego w stanie spoczynku lub ruchu ciała sztywnego, można dodać lub odjąć dwie równe i bezpośrednio przeciwne siły przyłożone do dwóch punktów ciała.
Ten bardziej ogólny postulat, który można również bezpośrednio zweryfikować doświadczeniem, pozwala nam podać, co następuje
to samo uogólnienie na koncepcję redukcji i równoważności sił. Faktycznie we wszystkich zdaniach paragrafu 185 możliwe jest zastąpienie słów „bez zakłócania równowagi” słowami „bez zmiany czegokolwiek w stanie spoczynku lub ruchu ciała”. Wówczas wniosek z paragrafu 185 okazuje się równoważny wyrażonej tutaj zasadzie dynamiki.
Zwróćmy uwagę szczególnie na jeden wniosek:
Jeżeli ciało sztywne pod wpływem układu sił S pozostaje w równowadze, to ten układ sił (równoważny zeru) nie może nic zmienić w stanie ruchu ciała, jeżeli ono nie znajduje się już w spoczynku .
Teraz całkiem naturalne jest ustalenie następującej definicji:
Dany układ sił jest w równowadze z punktu widzenia dynamiki lub w równowadze dynamicznej, jeśli siły nie mogą zmienić stanu spoczynku lub ruchu ciała sztywnego, do którego są przyłożone.
Mając tę definicję, możemy wysunąć następującą propozycję:
Aby siły przyłożone do ciała stałego były w równowadze dynamicznej, konieczne i wystarczające jest, aby reprezentowały one układ wektorów równoważny zeru.
Ten sposób przedstawiania równowagi sił przyłożonych do ciała stałego jest bardzo rozpowszechniony i słowo „równowaga” jest bardzo często używane w tym znaczeniu. Nie należy jednak tracić z oczu faktu, że ta koncepcja równowagi odnosi się bardziej do dynamiki niż do statyki.
188. Środek ciężkości ciała stałego.
Redukcję sił działających na bryłę sztywną można w szczególności przeprowadzić dla sił ciężaru wszystkich punktów materialnych wchodzących w skład bryły. Wszystkie te siły reprezentują siły równoległe, jednakowo zorientowane. Ten układ wektorów sprowadza się zatem do jednego wypadkowego, równego całkowitemu ciężarowi P ciała sztywnego i przyłożonego w środkach tych równoległych wektorów, co
oznaczymy G. Ten punkt, którego położenie w ciele nie zależy od jego orientacji względem powierzchni Ziemi, jest środkiem ciężkości ciała. W następnym rozdziale zobaczymy, jak można wyznaczyć jego współrzędne. Z poprzednich twierdzeń wynika, że działanie ciężkości na różne punkty ciała sztywnego, zarówno ze statycznego, jak i dynamicznego punktu widzenia, sprowadza się do jednej siły, czyli całkowitego ciężaru przyłożonego w środku ciężkości ciała.