ប្រសិនបើគន្លងនៃចំណុចសម្ភារៈគឺជាបន្ទាត់កោង នោះយើងនឹងហៅចលនាបែបនេះថា curvilinear ។
ជាមួយនឹងចលនានេះ វាផ្លាស់ប្តូរទាំងទំហំ និងទិសដៅ។ ដូច្នេះនៅពេល ចលនា curvilinear.
 ចូរយើងពិចារណាអំពីចលនានៃចំណុចសម្ភារៈមួយនៅតាមបណ្តោយ គន្លង curvilinear(រូបភាព 2.11) ។ វ៉ិចទ័រល្បឿននៅចំណុចណាមួយនៃគន្លងត្រូវបានតម្រង់ទិសទៅវា។ សូមឱ្យល្បឿនស្ថិតនៅចំណុច M 0 និងនៅចំណុច M - ។ ក្នុងករណីនេះយើងជឿថាចន្លោះពេល Dt ក្នុងអំឡុងពេលផ្លាស់ប្តូរពីចំណុច M 0 ទៅចំណុច M គឺតូចណាស់ដែលការផ្លាស់ប្តូរក្នុងការបង្កើនល្បឿនក្នុងរ៉ិចទ័រនិងទិសដៅអាចត្រូវបានគេមិនយកចិត្តទុកដាក់។
ចូរយើងពិចារណាអំពីចលនានៃចំណុចសម្ភារៈមួយនៅតាមបណ្តោយ គន្លង curvilinear(រូបភាព 2.11) ។ វ៉ិចទ័រល្បឿននៅចំណុចណាមួយនៃគន្លងត្រូវបានតម្រង់ទិសទៅវា។ សូមឱ្យល្បឿនស្ថិតនៅចំណុច M 0 និងនៅចំណុច M - ។ ក្នុងករណីនេះយើងជឿថាចន្លោះពេល Dt ក្នុងអំឡុងពេលផ្លាស់ប្តូរពីចំណុច M 0 ទៅចំណុច M គឺតូចណាស់ដែលការផ្លាស់ប្តូរក្នុងការបង្កើនល្បឿនក្នុងរ៉ិចទ័រនិងទិសដៅអាចត្រូវបានគេមិនយកចិត្តទុកដាក់។
 ល្បឿនផ្លាស់ប្តូរវ៉ិចទ័រ។ (អ៊ិន ក្នុងករណីនេះភាពខុសគ្នានៃវ៉ិចទ័រ 2 នឹងស្មើនឹង ) ។ ចូរយើងបំបែកវ៉ិចទ័រ ដែលកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនទាំងក្នុងរ៉ិចទ័រ និងក្នុងទិសដៅទៅជាសមាសធាតុពីរ និង។ សមាសធាតុដែលជាតង់សង់ទៅនឹងគន្លងនៅចំណុច M 0 កំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងរ៉ិចទ័រក្នុងអំឡុងពេល Dt ក្នុងអំឡុងពេលដែលធ្នូ M 0 M ត្រូវបានឆ្លងកាត់ហើយត្រូវបានគេហៅថា តង់សង់សមាសធាតុនៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន () ។ វ៉ិចទ័រដែលដឹកនាំក្នុងដែនកំណត់នៅពេលដែល Dt ® 0 តាមបណ្តោយកាំទៅកណ្តាលកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងទិសដៅហើយត្រូវបានគេហៅថាសមាសធាតុធម្មតានៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន () ។
ល្បឿនផ្លាស់ប្តូរវ៉ិចទ័រ។ (អ៊ិន ក្នុងករណីនេះភាពខុសគ្នានៃវ៉ិចទ័រ 2 នឹងស្មើនឹង ) ។ ចូរយើងបំបែកវ៉ិចទ័រ ដែលកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនទាំងក្នុងរ៉ិចទ័រ និងក្នុងទិសដៅទៅជាសមាសធាតុពីរ និង។ សមាសធាតុដែលជាតង់សង់ទៅនឹងគន្លងនៅចំណុច M 0 កំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងរ៉ិចទ័រក្នុងអំឡុងពេល Dt ក្នុងអំឡុងពេលដែលធ្នូ M 0 M ត្រូវបានឆ្លងកាត់ហើយត្រូវបានគេហៅថា តង់សង់សមាសធាតុនៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន () ។ វ៉ិចទ័រដែលដឹកនាំក្នុងដែនកំណត់នៅពេលដែល Dt ® 0 តាមបណ្តោយកាំទៅកណ្តាលកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងទិសដៅហើយត្រូវបានគេហៅថាសមាសធាតុធម្មតានៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន () ។
ដូច្នេះល្បឿនផ្លាស់ប្តូរវ៉ិចទ័រ ស្មើនឹងផលបូកវ៉ិចទ័រពីរ ![]() .
.
បន្ទាប់មកយើងអាចសរសេរវាបាន
ជាមួយនឹងការថយចុះគ្មានកំណត់នៅក្នុងDt®0 មុំ Da នៅចំនុចកំពូល DM 0 AC នឹងមានទំនោរទៅសូន្យ។ បន្ទាប់មកវ៉ិចទ័រអាចត្រូវបានគេមិនយកចិត្តទុកដាក់បើប្រៀបធៀបទៅនឹងវ៉ិចទ័រ, និងវ៉ិចទ័រ
![]()
នឹងបង្ហាញ ការបង្កើនល្បឿន tangentialនិងកំណត់លក្ខណៈល្បឿននៃការផ្លាស់ប្តូរល្បឿននៃចលនាក្នុងទំហំ។ ហេតុដូច្នេះ ការបង្កើនល្បឿនតង់ហ្សង់គឺជាលេខស្មើនឹងដេរីវេនៃម៉ូឌុលល្បឿនដោយគោរពតាមពេលវេលា ហើយត្រូវបានដឹកនាំតាមតង់សង់ទៅគន្លង។
ឥឡូវនេះ ចូរយើងគណនាវ៉ិចទ័រដែលហៅថា ការបង្កើនល្បឿនធម្មតា។. នៅ Dt តូចល្មមផ្នែកនៃគន្លងកោងអាចចាត់ទុកថាជាផ្នែកមួយនៃរង្វង់។ ក្នុងករណីនេះកាំនៃកោង M 0 O និង MO នឹងស្មើគ្នានិងស្មើនឹងកាំនៃរង្វង់ R ។
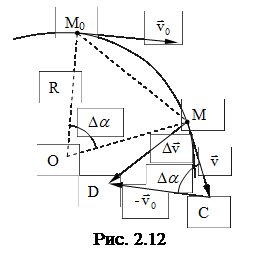
ចូរយើងគូរឡើងវិញ។ ÐM 0 OM = ÐMSD ដូចជាមុំដែលមានជ្រុងកាត់កែងគ្នា (រូបភាព 2. 12)។ សម្រាប់ Dt តូច យើងអាចពិចារណា |v 0 |=|v| ដូច្នេះ DM 0 OM = DMDC គឺស្រដៀងនឹង ត្រីកោណ isoscelesជាមួយ មុំដូចគ្នា។នៅកំពូល។
ដូច្នេះពីរូបភព។ 2.11 ដូចខាងក្រោម
 Þ ,
Þ ,
ប៉ុន្តែ DS = v ជាមធ្យម។ ×Dt បន្ទាប់មក។
ទៅដែនកំណត់នៅ Dt ® 0 ហើយយកទៅក្នុងគណនីថានៅក្នុងករណីនេះ v av ។ = v យើងរកឃើញ
 , i.e. (2.5)
, i.e. (2.5)
ដោយសារតែ នៅ Dt ® 0 មុំ Da ® 0 បន្ទាប់មកទិសដៅនៃការបង្កើនល្បឿននេះស្របគ្នាជាមួយនឹងទិសដៅនៃកាំ R នៃកោងឬជាមួយនឹងទិសដៅនៃធម្មតាទៅល្បឿន, i.e. វ៉ិចទ័រ ដូច្នេះការបង្កើនល្បឿននេះត្រូវបានគេហៅថាជាញឹកញាប់ កណ្តាល. វាកំណត់លក្ខណៈល្បឿននៃការផ្លាស់ប្តូរក្នុងល្បឿននៃចលនាក្នុងទិសដៅ។
ការបង្កើនល្បឿនសរុបត្រូវបានកំណត់ដោយផលបូកវ៉ិចទ័រនៃ tangential និងការបង្កើនល្បឿនធម្មតា (រូបភាព 2.13) ។ ដោយសារតែ វ៉ិចទ័រនៃការបង្កើនល្បឿនទាំងនេះកាត់កែងគ្នាទៅវិញទៅមក បន្ទាប់មកម៉ូឌុលនៃការបង្កើនល្បឿនសរុបគឺស្មើនឹង  ; ទិសដៅនៃការបង្កើនល្បឿនសរុបត្រូវបានកំណត់ដោយមុំ j រវាងវ៉ិចទ័រនិង៖
; ទិសដៅនៃការបង្កើនល្បឿនសរុបត្រូវបានកំណត់ដោយមុំ j រវាងវ៉ិចទ័រនិង៖
Kinematics នៃចលនាបង្វិល។
ល្បឿនមុំ។
និយមន័យ៖ ចលនាបង្វិលយើងនឹងហៅចលនាបែបនេះ ដែលគ្រប់ចំណុចគឺពិតជា រឹងពិពណ៌នាអំពីរង្វង់ដែលកណ្តាលស្ថិតនៅលើបន្ទាត់ត្រង់ដូចគ្នា ហៅថាអ័ក្សនៃការបង្វិល។
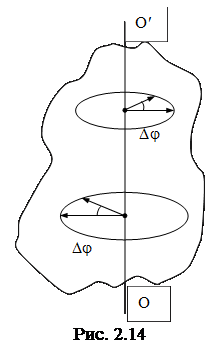 ក្នុងនាមជាកូអរដោណេដែលកំណត់ទីតាំងនៃចំណុចក្នុងអំឡុងពេលចលនាបង្វិល សូមយកមុំដែលកំណត់លក្ខណៈនៃទីតាំងភ្លាមៗនៃវ៉ិចទ័រកាំដែលដកចេញពីចំណុចកណ្តាលនៃការបង្វិលទៅចំណុចនៅក្នុងសំណួរ (រូបភាព 2.14)
ក្នុងនាមជាកូអរដោណេដែលកំណត់ទីតាំងនៃចំណុចក្នុងអំឡុងពេលចលនាបង្វិល សូមយកមុំដែលកំណត់លក្ខណៈនៃទីតាំងភ្លាមៗនៃវ៉ិចទ័រកាំដែលដកចេញពីចំណុចកណ្តាលនៃការបង្វិលទៅចំណុចនៅក្នុងសំណួរ (រូបភាព 2.14)
ដើម្បីកំណត់លក្ខណៈចលនាបង្វិល គំនិតត្រូវបានណែនាំ ល្បឿនមុំ
វ៉ិចទ័រត្រូវបានដឹកនាំតាមអ័ក្សជុំវិញដែលរាងកាយបង្វិលក្នុងទិសដៅដែលបានកំណត់ ច្បាប់វីសត្រឹមត្រូវ។(រូបភាព 2.15) ។
ទំហំនៃវ៉ិចទ័រល្បឿនមុំគឺស្មើនឹង . ប្រសិនបើ = const នោះចលនាបែបនេះត្រូវបានគេហៅថាឯកសណ្ឋាន ហើយដូច្នេះនៅ t 0 = 0 យើងទទួលបាន។
ប្រសិនបើ j 0 = 0 បន្ទាប់មក j = w tឬ។
ដូច្នេះជាមួយនឹងចលនាឯកសណ្ឋាន វបង្ហាញមុំដែលរាងកាយបង្វិលក្នុងមួយឯកតាពេលវេលា។ វិមាត្រនៃល្បឿនមុំ [ វ]=rad/វិ។
ការបង្វិលឯកសណ្ឋានអាចត្រូវបានកំណត់ដោយរយៈពេលបង្វិល T ដែលត្រូវបានយល់ថាជាពេលវេលាដែលរាងកាយបង្កើត។ វេនពេញ, i.e. បង្វិលតាមមុំ 2 ភី។ ក្នុងករណីនេះ។
ប្រេកង់បង្វិល (ចំនួនបដិវត្តក្នុងមួយឯកតាពេលវេលា): n=1/T=w/2p។ ដូច្នេះ w=2pn ។
ឧបសម្ព័ន្ធ ១.
ការបង្វិលតួតាមមុំតូចជាក់លាក់ dj អាចត្រូវបានបញ្ជាក់ក្នុងទម្រង់ជាផ្នែក ដែលប្រវែងស្មើនឹង dj ហើយទិសដៅស្របគ្នានឹងអ័ក្សជុំវិញដែលការបង្វិលត្រូវបានធ្វើឡើង។ ដូច្នេះការបង្វិលនៃរាងកាយអាចត្រូវបានកំណត់គុណលក្ខណៈមួយចំនួន តម្លៃលេខនិងទិសដៅ។ ក្នុងករណីនេះទិសដៅនៃវ៉ិចទ័រអាចត្រូវបានកំណត់ដោយទំនាក់ទំនងវាទៅនឹងទិសដៅនៃការបង្វិលនៃរាងកាយ។ វ៉ិចទ័របែបនេះត្រូវបានគេហៅថា អ័ក្សឬ pseudoectors ផ្ទុយទៅនឹងការពិតឬ ប៉ូលវ៉ិចទ័រដែលទិសដៅត្រូវបានកំណត់តាមធម្មជាតិ ( , , ។ ផ្ទុយ៖ .
វ៉ិចទ័រល្បឿនមុំអាចផ្លាស់ប្តូរបានទាំងដោយសារតែការផ្លាស់ប្តូរល្បឿននៃការបង្វិលតួជុំវិញអ័ក្ស (ក្នុងករណីនេះវាផ្លាស់ប្តូរក្នុងទំហំ) និងដោយសារតែការបង្វិលអ័ក្សបង្វិលក្នុងលំហ (ក្នុងករណីនេះវាផ្លាស់ប្តូរនៅក្នុង ទិសដៅ) ។ ដើម្បីកំណត់លក្ខណៈអត្រានៃការផ្លាស់ប្តូរ បរិមាណរូបវន្តហៅថា ការបង្កើនល្បឿនមុំ.
និយមន័យ៖ ការបង្កើនល្បឿនមុំមធ្យមត្រូវបានគេហៅថាបរិមាណ ដែល Dt គឺជារយៈពេលដែលល្បឿនមុំបានផ្លាស់ប្តូរ។
និយមន័យ៖ ការបង្កើនល្បឿនភ្លាមៗត្រូវបានគេហៅថាបរិមាណស្មើនឹង;
ប្រសិនបើទិសដៅនៃអ័ក្សបង្វិលក្នុងលំហគឺថេរ នោះល្បឿនមុំផ្លាស់ប្តូរតែក្នុងទំហំប៉ុណ្ណោះ ហើយក្នុងករណីនេះ  .
.
ប្រសិនបើដោយ e យើងមានន័យថាការព្យាករនៃវ៉ិចទ័រទៅទិសដៅនោះរូបមន្តចុងក្រោយនឹងយកទម្រង់ ![]() . នៅទីនេះ អ៊ី គឺជាបរិមាណពិជគណិត និង
. នៅទីនេះ អ៊ី គឺជាបរិមាណពិជគណិត និង
ប្រសិនបើ w នោះ e> 0 (វ៉ិចទ័រ និងទិសដៅមួយ)
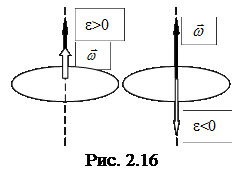 ប្រសិនបើ w ¯ បន្ទាប់មក អ៊ី<0 ( ¯ ).
ប្រសិនបើ w ¯ បន្ទាប់មក អ៊ី<0 ( ¯ ).
1) ប្រសិនបើ e>0 Þ ការបង្វិលត្រូវបានបង្កើនល្បឿនស្មើគ្នា ( ) (រូបភាព 2.16) ។
2) ប្រសិនបើ e<0 – ( ¯ ) (рис. 2.16).
នៅក្នុងប្រព័ន្ធ SI [e] = rad/s ២.
សម្រាប់ចលនាបង្កើនល្បឿនស្មើគ្នា៖
អាស្រ័យហេតុនេះ w = w 0 + e (t - t 0). នៅ t 0 = 0 យើងទទួលបាន w = w 0 + e·t ។
ទីបំផុត
ឥឡូវតោះដំឡើង
ចលនានៃចំណុចក៏ត្រូវបានកំណត់លក្ខណៈដោយការបង្កើនល្បឿន - អត្រានៃការផ្លាស់ប្តូរល្បឿន។ ប្រសិនបើល្បឿននៃចំណុចមួយផ្លាស់ប្តូរដោយតម្លៃក្នុងរយៈពេលបំពាន នោះតម្លៃ
វាត្រូវបានគេហៅថាការបង្កើនល្បឿនជាមធ្យមនៃចំណុចក្នុងអំឡុងពេលនេះ។ ការបង្កើនល្បឿននៅក្នុង នៅពេលនេះពេលវេលា៖
ទាំងនោះ។ វ៉ិចទ័រគឺស្មើនឹងដេរីវេនៃពេលវេលា។ ទិសដៅនៃវ៉ិចទ័រស្របគ្នានឹងទិសដៅនៃការកើនឡើងល្បឿនសម្រាប់ . ចាប់តាំងពី , ការបង្កើនល្បឿននៃចំណុចមួយអាចត្រូវបានសរសេរជាដេរីវេទី 2 ទាក់ទងនឹងពេលវេលានៃវ៉ិចទ័រកាំ៖
វ៉ិចទ័របង្កើនល្បឿនអាចត្រូវបានពង្រីកទៅជាសមាសធាតុ៖ ![]() ; កន្លែងណា
; កន្លែងណា ![]() រៀងគ្នា ... ការព្យាករណ៍ការបង្កើនល្បឿននៅលើអ័ក្សកូអរដោនេ។
រៀងគ្នា ... ការព្យាករណ៍ការបង្កើនល្បឿននៅលើអ័ក្សកូអរដោនេ។
ប្រសិនបើគន្លងនៃចំណុចមួយគឺជាខ្សែកោងរាបស្មើ បន្ទាប់មកដើម្បីពិពណ៌នាអំពីចលនា អ្នកអាចជ្រើសរើសទិសដៅពីរដែលកាត់កែងទៅគ្នាទៅវិញទៅមក៖ តង់សង់ទៅគន្លង (ort) និងធម្មតាទៅវា (ort) ។ បន្ទាប់មកវាត្រូវបានបំបែកទៅជាសមាសធាតុ។
ចាប់តាំងពីវ៉ិចទ័រល្បឿនបន្ទាប់មកជំនួសនៅទីនេះ ការផ្លាស់ទីលំនៅបឋម ![]() , យើងទទួលបានសម្រាប់ល្បឿន: .
, យើងទទួលបានសម្រាប់ល្បឿន: .
បន្ទាប់មក ដើម្បីពន្លឿនចំណុចដែលយើងអាចសរសេរ៖
![]() ;
;
ពីរូបភព។ វាច្បាស់ណាស់ថាមានភាពខុសគ្នារវាងវ៉ិចទ័រ និង . វាអាចត្រូវបានគេមើលឃើញថាមានការបង្កើនទៅវ៉ិចទ័រឯកតានៃតង់សង់ទៅគន្លងដែលត្រូវគ្នាទៅនឹងផ្លូវបឋមក្នុងពេលវេលា។

| |
នៅពេលផ្លាស់ទីតាមបណ្តោយផ្លូវដោយប្រវែង វ៉ិចទ័រឯកតាបង្វិលតាមមុំមួយ។ ពីត្រីកោណ isosceles នៃវ៉ិចទ័រ ![]() ដោយសារតែទំហំតូចរបស់វា;
ដោយសារតែទំហំតូចរបស់វា;
ទិសដៅស្របគ្នានឹងវ៉ិចទ័រឯកតា៖ នៅពេលដែលវ៉ិចទ័រក្លាយជាកាត់កែង។ បន្ទាប់មកដេរីវេ៖
និងការបង្កើនល្បឿនពេញលេញនៃចំណុច
ពីនេះវាអាចត្រូវបានគេមើលឃើញថាការបង្កើនល្បឿន tangential (តង់សង់) កំណត់អត្រានៃការផ្លាស់ប្តូរនៅក្នុងម៉ូឌុលល្បឿន។ ជាមួយនឹងចលនាបង្កើនល្បឿននិងស្របគ្នាជាមួយនឹងចលនាយឺតនិងផ្ទុយ។
ការបង្កើនល្បឿនធម្មតាកំណត់លក្ខណៈល្បឿននៃការផ្លាស់ប្តូរក្នុងទិសដៅនៃវ៉ិចទ័រល្បឿន។ វាត្រូវបានតម្រង់ឆ្ពោះទៅកណ្តាលនៃ curvature នៃគន្លង; ; ដូច្នេះវាត្រូវបានគេហៅថា centripetal ផងដែរ។ នៅពេលផ្លាស់ទីក្នុងបន្ទាត់ត្រង់។
ម៉ូឌុលបង្កើនល្បឿនពេញលេញ
ក្នុងអំឡុងពេលចលនាបង្កើនល្បឿន, មុំគឺស្រួច, រូបភព។ នៅក្នុងចលនាយឺត - obtuse (មុំរវាងនិង ). ប្រសិនបើចំនុចមួយផ្លាស់ទីស្មើៗគ្នាជុំវិញរង្វង់មួយ ឧ. , បន្ទាប់មក និង , i.e. កាត់កែងទៅនឹងតង់សង់ទៅគន្លង។
ថាមវន្តនៃចលនាបកប្រែ
ចលនាទៅមុខ
ប្រភេទចលនាមេកានិចដ៏សាមញ្ញបំផុតរបស់រាងកាយរឹងគឺចលនាបកប្រែ ដែលបន្ទាត់ត្រង់តភ្ជាប់ចំណុចទាំងពីរនៃរាងកាយផ្លាស់ទីជាមួយរាងកាយ នៅសល់ស្របគ្នា | ទៅទីតាំងដើមរបស់វា (បាល់នៅលើនិទាឃរដូវទាក់ទងទៅនឹងផែនដី ស្តុងនៅក្នុងស៊ីឡាំងម៉ាស៊ីនស្ថានី ជណ្តើរយន្ត ឧបករណ៍កាត់ក្រឡឹង។ល។)។ គន្លងនៃចំណុចទាំងអស់នៃរាងកាយគឺដូចគ្នា។ រ៉ាឌី - វ៉ិចទ័រនៃចំណុចទាំងអស់នៃរាងកាយផ្លាស់ប្តូរដោយបរិមាណដូចគ្នាតាមពេលវេលាល្បឿននៃចំណុចទាំងអស់និងការបង្កើនល្បឿនរបស់ពួកគេគឺដូចគ្នា:
; ![]()
ទាំងនោះ។ ដើម្បីពិពណ៌នាអំពីចលនា អ្នកអាចយកចំណុចមួយនៃរាងកាយ។ ប្រសិនបើក្នុងពេលតែមួយ នោះដោយការរួមបញ្ចូល យើងរកឃើញល្បឿននៃចំណុច៖
; បន្ទាប់មក ការរួមបញ្ចូលល្បឿន យើងរកឃើញកូអរដោនេ៖
ច្បាប់នៃនិចលភាព។
មេកានិចបុរាណគឺផ្អែកលើច្បាប់ទាំងបីរបស់ញូវតុនដែលបង្កើតដោយគាត់នៅក្នុងអត្ថបទរបស់គាត់ "គោលការណ៍គណិតវិទ្យានៃទស្សនវិជ្ជាធម្មជាតិ" ដែលបានបោះពុម្ពនៅឆ្នាំ 1687 ។ ច្បាប់ទាំងនេះគឺជាលទ្ធផលនៃការធ្វើឱ្យទូទៅដ៏អស្ចារ្យនៃទិន្នន័យពិសោធន៍ និងច្បាប់ទ្រឹស្តីនៅក្នុងវិស័យមេកានិច ដែលត្រូវបានបង្កើតឡើងដោយញូតុន ក៏ដូចជា Kepler ។ Galileo, Huygens ។ Guk et al ។
ជាច្បាប់ដំបូងនៃថាមវន្ត ញូតុនបានអនុម័តច្បាប់ដែលបង្កើតឡើងដោយកាលីលេ៖
រាងកាយនីមួយៗរក្សាស្ថានភាពនៃការសម្រាក ឬឯកសណ្ឋាន ចលនា rectilinearរហូតដល់ឥទ្ធិពលខាងក្រៅបង្ខំឱ្យរដ្ឋនេះផ្លាស់ប្តូរ។
ច្បាប់នេះចែងថាស្ថានភាពនៃការសម្រាក ឬចលនាលីនេអ៊ែរឯកសណ្ឋានមិនទាមទារទេ។ ឥទ្ធិពលខាងក្រៅ. នេះបង្ហាញពីលក្ខណៈសម្បត្តិថាមវន្តពិសេសនៃសាកសពដែលហៅថា និចលភាព។ ដូច្នេះហើយ ច្បាប់ទីមួយរបស់ញូតុនត្រូវបានគេហៅថាច្បាប់នៃនិចលភាព ហើយចលនានៃរាងកាយក្នុងករណីដែលគ្មានឥទ្ធិពលខាងក្រៅត្រូវបានគេហៅថាចលនាដោយនិចលភាព។
នៅក្នុងការបង្កើតច្បាប់នេះ វាត្រូវបានសន្មត់ថារាងកាយមិនត្រូវបានខូចទ្រង់ទ្រាយ, i.e. វាពិតជារឹងមាំ ហើយវាឈានទៅមុខ។ ទោះជាយ៉ាងណាក៏ដោយ រាងកាយរឹងនៅតែអាចបង្វិលស្មើគ្នាដោយនិចលភាព ខណៈពេលដែលមានការបង្កើនល្បឿន។ តម្រូវការសម្រាប់ការកក់ទុកទាំងអស់នេះនឹងរលាយបាត់ ប្រសិនបើនៅក្នុងច្បាប់ទីមួយរបស់ញូតុន យើងនិយាយមិនមែនអំពីរូបកាយទេ ប៉ុន្តែអំពីចំណុចសម្ភារៈ ដែលតាមនិយមន័យ មិនអាចខូចទ្រង់ទ្រាយ ឬបង្វិលបានទេ។
ដូច្នេះសម្រាប់ចំណុចសម្ភារៈ គេប្រើទម្រង់ខាងក្រោម៖
ចំណុចសម្ភារៈរក្សាស្ថានភាពនៃការសម្រាក ឬចលនា rectilinear ឯកសណ្ឋាន រហូតដល់ឥទ្ធិពលខាងក្រៅយកវាចេញពីរដ្ឋនេះ។
វិមាត្រនៃលំហ
វិមាត្រត្រូវបានយល់ថាជាចំនួនរង្វាស់ដែលគួរតែត្រូវបានធ្វើឡើងដើម្បីកំណត់ទីតាំងនៃចំណុចជាក់លាក់មួយដោយមិនច្បាស់លាស់។ ដូច្នេះ ដើម្បីកំណត់ទីតាំងនៃចំណុចមួយក្នុងលំហដោយមិនច្បាស់លាស់ក្នុងពេលវេលាកំណត់មួយ វាចាំបាច់ និងគ្រប់គ្រាន់ដើម្បីចង្អុលបង្ហាញកូអរដោនេទាំងបីរបស់វា។ នៅក្នុងប្រព័ន្ធកូអរដោណេរាងចតុកោណកែងទូទៅបំផុត នេះគឺ x, y, z -ប្រវែងទទឹងនិងកម្ពស់ (រូបភាព 5.2, α); នៅក្នុងប្រព័ន្ធកូអរដោនេស្វ៊ែរ អ្នកត្រូវបញ្ជាក់វ៉ិចទ័រកាំ rនិងមុំ α និង β (រូបភាព 5.2, ខ);នៅក្នុងប្រព័ន្ធស៊ីឡាំង - កម្ពស់ hវ៉ិចទ័រកាំ rនិងមុំ α (រូបភាព 5.2, វ).
វាត្រូវបានគេជឿថាដំណើរការសម្ភារៈ និងអន្តរកម្មទាំងអស់ត្រូវបានដឹងយ៉ាងជាក់លាក់នៅក្នុងចន្លោះនៃវិមាត្របី។ នៅក្នុងលំហមួយវិមាត្រ (បន្ទាត់) ឬពីរវិមាត្រ (យន្តហោះ) អន្តរកម្មនៃភាគល្អិត និងវាលមិនអាចកើតឡើងបានទេ។ វិមាត្របីគឺជាអប្បបរមាចាំបាច់ និងគ្រប់គ្រាន់ដែលអន្តរកម្មគ្រប់ប្រភេទនៃវត្ថុវត្ថុអាចកើតឡើង។
បច្ចុប្បន្ននេះមិនមានទម្រង់នៃចលនា និងអន្តរកម្មដែលគេស្គាល់ថាត្រូវការចន្លោះបួន ឬប្រាំវិមាត្រទេ ហើយលទ្ធភាពនៃដំណើរការបែបនេះមិនអនុវត្តតាមច្បាប់នៃធម្មជាតិណាមួយឡើយ។
មានការពិភាក្សាជាញឹកញាប់នៅក្នុងអក្សរសិល្ប៍អំពីលទ្ធភាពនៃអត្ថិភាពនៃចន្លោះដែលមានវិមាត្រច្រើនទៀត។ ដូច្នេះថ្មីៗនេះ សម្មតិកម្មមួយត្រូវបានគេដាក់ចេញអំពីវិមាត្រ 11 ពិតប្រាកដនៅក្នុង microworld ក្នុងគ្រាដំបូងនៃកំណើតនៃសកលលោករបស់យើង: 10 - spatial និងដំណាលគ្នា; បន្ទាប់មកពួកគេបង្កើតជា 4-dimensional space-time continuum ។ សម្មតិកម្មនេះគឺទាក់ទងទៅនឹងកាលៈទេសៈដូចខាងក្រោម។ នៅក្នុងគណិតវិទ្យា និងរូបវិទ្យា គោលគំនិតនៃពហុវិមាត្រ ( ន- វិមាត្រ) ចន្លោះ។ អរូបីគណិតវិទ្យានេះដើរតួនាទីយ៉ាងសំខាន់។ កូអរដោនេនីមួយៗនៃលំហពហុវិមាត្រអាចបង្ហាញពីទ្រព្យសម្បត្តិនៃការពិតរូបវន្តដែលកំពុងពិចារណា - សីតុណ្ហភាព ដង់ស៊ីតេ ល្បឿន ម៉ាស។ល។ ប្រសិនបើចំនួននៃប៉ារ៉ាម៉ែត្របែបនេះរួមជាមួយនឹងលក្ខណៈពេលវេលាលំហគឺស្មើនឹង ទំ,បន្ទាប់មកពួកវាត្រូវបានចាត់ទុកថាបង្កើតជា “-dimensional space ហើយតម្លៃជាក់លាក់នៃលក្ខណៈសម្បត្តិត្រូវបានកំណត់ជាចំនុចនៅក្នុង “-dimensional space ។ ជាមួយនឹងចំនួនច្រើនគ្រប់គ្រាន់នៃលក្ខណៈសម្បត្តិ និងអថេរដែលទាក់ទងគ្នា មនុស្សម្នាក់អាចឈានដល់គំនិតនៃពហុវិមាត្រ និងសូម្បីតែទំហំគ្មានកំណត់។ ទោះជាយ៉ាងណាក៏ដោយ គំនិតនៃលំហនៅទីនេះមានលក្ខណៈតាមលក្ខខណ្ឌ ព្រោះវាត្រូវបានប្រើដើម្បីកំណត់លក្ខណៈខុសគ្នាទាំងស្រុង។
វិមាត្រនៃពេលវេលា
ចំពោះវិមាត្រនៃពេលវេលា ពួកវាច្រើនតែចង្អុលទៅវិមាត្រតែមួយរបស់វា៖ ដើម្បីកំណត់ពេលវេលា វាគ្រប់គ្រាន់ដើម្បីបញ្ជាក់កូអរដោនេមួយ។ យោងតាម S.T. Melyukhina ប្រសិនបើពេលវេលាមិនមានមួយ ប៉ុន្តែវិមាត្រពីរ បី ឬច្រើន នោះមានន័យថា ស្របទៅនឹងពិភពលោករបស់យើងមានភាពស្រដៀងគ្នា និងមិនមានទំនាក់ទំនងជាមួយពិភពភ្លោះរបស់យើង ដែលព្រឹត្តិការណ៍ដូចគ្នាកើតឡើងក្នុងលំដាប់ដូចគ្នា។ ដូច្នោះហើយ មនុស្សម្នាក់ៗត្រូវតែមានទ្វេរដងក្នុងពិភពស្របគ្នា។ ប៉ុន្តែមិនមានមូលដ្ឋានសម្រាប់ការសន្មត់បែបនេះទេ។
ទស្សនៈផ្សេងគ្នាត្រូវបានចែករំលែកដោយអ្នកភូមិសាស្ត្ររុស្ស៊ី Yu.G. ស៊ីម៉ូណូវ។ គាត់ជឿថាវាពិតជាអាចទៅរួចក្នុងការស្នើរគំរូនៃពេលវេលាពីរវិមាត្រដែលមានប្រយោជន៍សម្រាប់ការពិពណ៌នា និងសិក្សាពីថ្នាក់ជាក់លាក់នៃព្រឹត្តិការណ៍ ហើយពិនិត្យមើលវាដោយប្រើឧទាហរណ៍នៃបាតុភូតភូមិសាស្ត្រជាក់លាក់។ នៅទីនេះយើងគួរចងចាំអំពីពេលវេលាពីរប្រភេទ - ព្រះអាទិត្យនិងតាមច័ន្ទគតិ។ ព្រឹត្តិការណ៍ផ្សេងៗអាចត្រូវបានផ្សារភ្ជាប់ជាមួយនឹងដំណាក់កាលនៃប្រតិទិនតាមច័ន្ទគតិ និងព្រះអាទិត្យ។ វាត្រូវបានគេដឹងថាវ៉ិចទ័រពេលវេលាទាំងនេះគឺឯករាជ្យ និងក្រៅដំណាក់កាល ហើយរយៈពេលរបស់ពួកគេមិនមែនជាពហុគុណនៃគ្នាទៅវិញទៅមកទេ។ ដូច្នេះ ដោយសិក្សាអំពីបាតុភូតនៅលើផែនដី គេអាចរកឃើញក្នុងចំណោមពួកវាដែលមានទំនាក់ទំនងតែជាមួយនឹងវាលទំនាញផែនដី - ព្រះច័ន្ទ និងផែនដី - ព្រះអាទិត្យ។ វាលទាំងនេះអាចត្រួតលើគ្នា ជួនកាលបូកបន្ថែម ជួនកាលដក។ ក្នុងករណីនេះ យើងអាចនិយាយអំពីការសិក្សាប្រព័ន្ធទំនាញនៃសាកសពបី។ នៅក្នុងប្រព័ន្ធបែបនេះ ចំនួនវ៉ិចទ័រពេលវេលាត្រូវគ្នានឹងចំនួនដឺក្រេនៃសេរីភាព។ អនុញ្ញាតឱ្យអ័ក្សនៅក្នុងចន្លោះនៃវ៉ិចទ័រពេលវេលាពីរ Xស្របគ្នានឹងវ៉ិចទ័រពេលវេលាព្រះអាទិត្យ និងអ័ក្ស y -ជាមួយព្រះច័ន្ទ។ ក្នុងដំណាក់កាលព្រះច័ន្ទថ្មី កម្លាំងទំនាញតាមច័ន្ទគតិ និងព្រះអាទិត្យត្រូវបានបន្ថែម ហើយក្នុងដំណាក់កាលព្រះច័ន្ទពេញវង់ ពួកគេត្រូវបានដក។ ដូច្នេះ ក្នុងដំណាក់កាលព្រះច័ន្ទថ្មី ផែនដី និងព្រះអាទិត្យជួបប្រទះការរំខានទំនាញអតិបរមា ហើយក្នុងដំណាក់កាលព្រះច័ន្ទពេញវង់ ព្រះច័ន្ទ និងព្រះអាទិត្យជួបប្រទះការរំខានទំនាញអតិបរមា។ អាំងតង់ស៊ីតេទំនាញផែនដីអប្បបរមាកើតឡើងនៅព្រះច័ន្ទពេញវង់ នៅពេលដែលវាលទំនាញត្រូវបានដក។ ដូច្នេះនៅលើផែនដី ទំនាញទំនាញកើនឡើងពីព្រះច័ន្ទពេញទៅព្រះច័ន្ទថ្មី ហើយបន្ទាប់មកថយចុះ។ នៅពេលដែលរលកទំនាញកើនឡើង ឥទ្ធិពលខ្លះកើតឡើង ហើយប្រឆាំងនឹងផ្ទៃខាងក្រោយនៃការថយចុះ (ការធូរស្រាល) នៃភាពតានតឹង ខ្លះទៀតកើតឡើង។ ដូច្នេះ ស្នាមប្រេះ tectonic បង្រួមនិងពង្រីកក្នុងដំណាក់កាលផ្សេងគ្នា; ដំណើរការដែលទាក់ទងនឹងសម្ពាធប្រេះស្រាំនៃទឹកក្រោមដីកើតឡើងជាមួយនឹងភាពខ្លាំងខុសៗគ្នា។ល។
ក្នុងករណីទូទៅ យោងតាមលោក Simonov មិនអាចមានវ៉ិចទ័រពីរទេ ប៉ុន្តែមានពេលវេលាច្រើន។ ជម្រើសនៃគំរូពេលវេលាពហុវិមាត្រ (ជាពិសេសការកំណត់ចំនួនវ៉ិចទ័រពេលវេលា) អាចត្រូវបានអនុវត្តយ៉ាងសាមញ្ញក្នុងករណីដែលដំណើរការដែលកំពុងសិក្សាគឺមិនឯករាជ្យពីគ្នាទៅវិញទៅមក ហើយពួកគេអាចត្រូវបានគេស្រមៃថាបង្ហាញជារង្វង់ និងវដ្ត។ មិនអាចស្ថិតនៅបានច្រើនម៉ោង និងច្រើនថ្ងៃទេ ប៉ុន្តែសម្រាប់រាប់ឆ្នាំ សតវត្ស និងរាប់ពាន់ឆ្នាំ។
ការបង្កើនល្បឿន
ការបង្កើនល្បឿនគឺជាបរិមាណដែលកំណត់លក្ខណៈនៃអត្រានៃការផ្លាស់ប្តូរល្បឿន។
ជាឧទាហរណ៍ នៅពេលដែលរថយន្តចាប់ផ្តើមផ្លាស់ទី វាបង្កើនល្បឿនរបស់វា ពោលគឺវាធ្វើចលនាកាន់តែលឿន។ ដំបូងល្បឿនរបស់វាគឺសូន្យ។ ពេលធ្វើដំណើរហើយ រថយន្តក៏បន្ថែមល្បឿនបន្តិចម្តងៗក្នុងល្បឿនកំណត់។ បើភ្លើងសញ្ញាចរាចរណ៍ពណ៌ក្រហមមកលើផ្លូវនោះ រថយន្តនឹងឈប់។ ប៉ុន្តែវានឹងមិនឈប់ភ្លាមៗទេប៉ុន្តែយូរ ៗ ទៅ។ នោះគឺល្បឿនរបស់វានឹងថយចុះដល់សូន្យ - រថយន្តនឹងផ្លាស់ទីយឺតៗរហូតដល់វាឈប់ទាំងស្រុង។ ទោះយ៉ាងណាក៏ដោយនៅក្នុងរូបវិទ្យាមិនមានពាក្យ "ការយឺតយ៉ាវ" ទេ។ ប្រសិនបើរាងកាយផ្លាស់ទី បន្ថយល្បឿន នេះក៏ជាការបង្កើនល្បឿននៃរាងកាយដែរ មានតែសញ្ញាដក (ដូចដែលអ្នកចងចាំ ល្បឿន
- នេះ។ បរិមាណវ៉ិចទ័រ).
ការបង្កើនល្បឿនជាមធ្យម
ការបង្កើនល្បឿនជាមធ្យមគឺជាសមាមាត្រនៃការផ្លាស់ប្តូរល្បឿនទៅនឹងរយៈពេលដែលការផ្លាស់ប្តូរនេះបានកើតឡើង។ ការបង្កើនល្បឿនជាមធ្យមអាចត្រូវបានកំណត់ដោយរូបមន្ត៖
កន្លែងណា - វ៉ិចទ័របង្កើនល្បឿន.
ទិសដៅនៃវ៉ិចទ័របង្កើនល្បឿនស្របគ្នានឹងទិសដៅនៃការផ្លាស់ប្តូរល្បឿន Δ = - 0 (នៅទីនេះ 0 គឺ ល្បឿនដំបូងនោះគឺល្បឿនដែលរាងកាយចាប់ផ្តើមបង្កើនល្បឿន) ។
នៅពេល t1 (មើលរូបភាព 1.8) រាងកាយមានល្បឿន 0 ។ នៅពេល t2 រាងកាយមានល្បឿន។ យោងទៅតាមច្បាប់នៃការដកវ៉ិចទ័រយើងរកឃើញវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន Δ = - 0 ។ បន្ទាប់មកអ្នកអាចកំណត់ការបង្កើនល្បឿនដូចនេះ៖
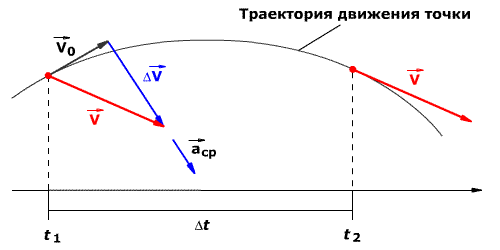
អង្ករ។ ១.៨. ការបង្កើនល្បឿនជាមធ្យម។
នៅក្នុង SI ឯកតាបង្កើនល្បឿន- គឺ 1 ម៉ែត្រក្នុងមួយវិនាទីក្នុងមួយវិនាទី (ឬម៉ែត្រក្នុងមួយវិនាទីការ៉េ) នោះគឺ
ម៉ែត្រក្នុងមួយវិនាទីការ៉េ ស្មើនឹងការបង្កើនល្បឿនចំណុចផ្លាស់ទី rectilinearly ដែលក្នុងនោះក្នុងមួយវិនាទីល្បឿននៃចំណុចនេះកើនឡើង 1 m / s ។ ម្យ៉ាងវិញទៀត ការបង្កើនល្បឿនកំណត់ថាតើល្បឿននៃការផ្លាស់ប្តូររាងកាយប៉ុន្មានក្នុងមួយវិនាទី។ ឧទាហរណ៍ ប្រសិនបើការបង្កើនល្បឿនគឺ 5 m/s2 នោះមានន័យថាល្បឿនរាងកាយកើនឡើង 5 m/s រៀងរាល់វិនាទី។
ការបង្កើនល្បឿនភ្លាមៗនៃរាងកាយ (ចំណុចសម្ភារៈ) នៅពេលកំណត់គឺជាបរិមាណរាងកាយ ស្មើនឹងដែនកំណត់ដែលការបង្កើនល្បឿនជាមធ្យមមាននិន្នាការ ខណៈចន្លោះពេលមានទំនោរទៅសូន្យ។ ម្យ៉ាងទៀត នេះគឺជាការបង្កើនល្បឿនដែលរាងកាយមានការវិវឌ្ឍក្នុងរយៈពេលខ្លីបំផុត៖
ទិសដៅនៃការបង្កើនល្បឿនក៏ស្របគ្នាជាមួយនឹងទិសដៅនៃការផ្លាស់ប្តូរល្បឿន Δ សម្រាប់តម្លៃតូចបំផុតនៃចន្លោះពេលដែលការផ្លាស់ប្តូរល្បឿនកើតឡើង។ វ៉ិចទ័របង្កើនល្បឿនអាចត្រូវបានបញ្ជាក់ដោយការព្យាករលើអ័ក្សកូអរដោនេដែលត្រូវគ្នានៅក្នុងប្រព័ន្ធយោងដែលបានផ្តល់ឱ្យ (ការព្យាករណ៍ a X, Y, a Z) ។
ជាមួយនឹងចលនាលីនេអ៊ែរដែលមានល្បឿនលឿន ល្បឿននៃរាងកាយកើនឡើងនៅក្នុងតម្លៃដាច់ខាត ពោលគឺ
វី ២ > វី ១
ហើយទិសដៅនៃវ៉ិចទ័របង្កើនល្បឿនស្របគ្នានឹងវ៉ិចទ័រល្បឿន 2 ។
ប្រសិនបើល្បឿននៃរាងកាយថយចុះនៅក្នុងតម្លៃដាច់ខាត នោះគឺ
វី ២< v 1
បន្ទាប់មកទិសដៅនៃវ៉ិចទ័របង្កើនល្បឿនគឺផ្ទុយទៅនឹងទិសដៅនៃវ៉ិចទ័រល្បឿន 2 ។ នៅក្នុងពាក្យផ្សេងទៀតក្នុងករណីនេះអ្វីដែលកើតឡើង បន្ថយល្បឿនក្នុងករណីនេះការបង្កើនល្បឿននឹងអវិជ្ជមាន (និង< 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
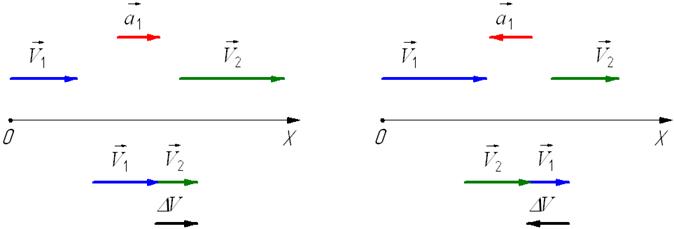
អង្ករ។ ១.៩. ការបង្កើនល្បឿនភ្លាមៗ។
នៅពេលផ្លាស់ទីតាមបណ្តោយផ្លូវកោងមិនត្រឹមតែម៉ូឌុលល្បឿនផ្លាស់ប្តូរប៉ុណ្ណោះទេប៉ុន្តែក៏មានទិសដៅរបស់វាផងដែរ។ ក្នុងករណីនេះវ៉ិចទ័របង្កើនល្បឿនត្រូវបានតំណាងជាសមាសភាគពីរ (សូមមើលផ្នែកបន្ទាប់) ។
ការបង្កើនល្បឿនតង់សង់
ការបង្កើនល្បឿនតង់ហ្សង់ (តង់សង់) គឺជាធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿនដែលដឹកនាំតាមបណ្តោយតង់ហ្សង់ទៅគន្លងនៅចំណុចដែលបានផ្តល់ឱ្យនៃគន្លងចលនា។ ការបង្កើនល្បឿន tangential កំណត់លក្ខណៈនៃការផ្លាស់ប្តូរនៃម៉ូឌុលល្បឿនក្នុងអំឡុងពេលចលនា curvilinear ។
អង្ករ។ ១.១០. ការបង្កើនល្បឿនតង់សង់។
ទិសដៅនៃវ៉ិចទ័របង្កើនល្បឿន tangential τ (សូមមើលរូប 1.10) ស្របគ្នានឹងទិសដៅនៃល្បឿនលីនេអ៊ែរ ឬផ្ទុយពីវា។ នោះគឺវ៉ិចទ័របង្កើនល្បឿនតង់សង់ស្ថិតនៅលើអ័ក្សដូចគ្នាជាមួយនឹងរង្វង់តង់សង់ដែលជាគន្លងនៃរាងកាយ។
ការបង្កើនល្បឿនធម្មតា។
ការបង្កើនល្បឿនធម្មតាគឺជាធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿនដែលដឹកនាំតាមធម្មតាទៅគន្លងនៃចលនានៅចំណុចដែលបានផ្តល់ឱ្យនៅលើគន្លងនៃរាងកាយ។ នោះគឺវ៉ិចទ័របង្កើនល្បឿនធម្មតាគឺកាត់កែងទៅនឹងល្បឿនលីនេអ៊ែរនៃចលនា (សូមមើលរូប 1.10)។ ការបង្កើនល្បឿនធម្មតាកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងទិសដៅ និងត្រូវបានតាងដោយអក្សរ n ។ វ៉ិចទ័របង្កើនល្បឿនធម្មតាត្រូវបានដឹកនាំតាមកាំនៃកោងនៃគន្លង។
ការបង្កើនល្បឿនពេញលេញ
ការបង្កើនល្បឿនសរុបក្នុងអំឡុងពេលចលនាកោងគឺជាផលបូកនៃ tangential និងការបង្កើនល្បឿនធម្មតានៅតាមបណ្តោយ ក្បួនបន្ថែមវ៉ិចទ័រ និងត្រូវបានកំណត់ដោយរូបមន្ត៖
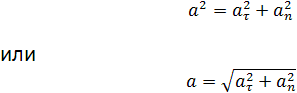
(យោងទៅតាមទ្រឹស្តីបទពីថាហ្គោរសម្រាប់ចតុកោណកែង) ។
ទិសដៅនៃការបង្កើនល្បឿនសរុបត្រូវបានកំណត់ផងដែរ។ ក្បួនបន្ថែមវ៉ិចទ័រ : = τ + ន
ការបង្កើនល្បឿនតង់ហ្សង់ គឺជាធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿនដែលដឹកនាំតាមបណ្តោយតង់សង់ទៅគន្លងនៅចំណុចដែលបានផ្តល់ឱ្យនៃគន្លងចលនា។ ការបង្កើនល្បឿន tangential កំណត់លក្ខណៈនៃការផ្លាស់ប្តូរនៃម៉ូឌុលល្បឿនក្នុងអំឡុងពេលចលនា curvilinear ។
ទិសដៅវ៉ិចទ័របង្កើនល្បឿនតង់សង់ កស្ថិតនៅលើអ័ក្សដូចគ្នាជាមួយនឹងរង្វង់តង់សង់ ដែលជាគន្លងនៃរាងកាយ។
ការបង្កើនល្បឿនធម្មតា។- នេះគឺជាធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿនដែលដឹកនាំតាមធម្មតាទៅគន្លងនៃចលនានៅចំណុចដែលបានផ្តល់ឱ្យនៅលើគន្លងនៃរាងកាយ។
 វ៉ិចទ័រ
កាត់កែងទៅនឹងល្បឿនលីនេអ៊ែរនៃចលនា តម្រង់តាមកាំនៃកោងនៃគន្លង។
វ៉ិចទ័រ
កាត់កែងទៅនឹងល្បឿនលីនេអ៊ែរនៃចលនា តម្រង់តាមកាំនៃកោងនៃគន្លង។
រូបមន្តល្បឿនសម្រាប់ចលនាបង្កើនល្បឿនស្មើគ្នា
រីកចម្រើន និង ចលនាបង្វិលរាងកាយរឹង។
ចលនាទៅមុខ
- ចលនាដែលចំណុចទាំងអស់នៃរាងកាយផ្លាស់ទីតាមគន្លងដូចគ្នា។
ចលនាទៅមុខមានពីរប្រភេទ៖ ឯកសណ្ឋាននិងមិនស្មើគ្នា។
ចលនាបង្វិល គឺជាចលនានៃរាងកាយជុំវិញអ័ក្សជាក់លាក់មួយ។ ជាមួយនឹងចលនាបែបនេះ ចំណុចទាំងអស់នៃរាងកាយផ្លាស់ទីជារង្វង់ ដែលចំណុចកណ្តាលគឺជាអ័ក្សនេះ។
ល្បឿនមុំ។ ការបង្កើនល្បឿនមុំ .
ល្បឿនមុំ - បរិមាណវ៉ិចទ័រដែលជា pseudovector (វ៉ិចទ័រអ័ក្ស) និងកំណត់លក្ខណៈល្បឿននៃការបង្វិលនៃចំណុចសម្ភារៈជុំវិញកណ្តាលនៃការបង្វិល។ វ៉ិចទ័រល្បឿនមុំគិតជារ៉ិចទ័រ ស្មើនឹងមុំការបង្វិលចំណុចជុំវិញចំណុចកណ្តាលនៃការបង្វិលក្នុងមួយឯកតាពេលវេលា៖
![]()
ការបង្កើនល្បឿនមុំ - បរិមាណរូបវន្ត pseudovector ស្មើទៅនឹងដេរីវេទី 1 នៃ pseudovector នៃល្បឿនមុំដោយគោរពតាមពេលវេលា
ការបង្កើនល្បឿនមុំកំណត់លក្ខណៈនៃអាំងតង់ស៊ីតេនៃការផ្លាស់ប្តូរនៅក្នុងម៉ូឌុល និងទិសដៅនៃល្បឿនមុំក្នុងអំឡុងពេលចលនានៃរាងកាយរឹង។
![]()
ទំនាក់ទំនងរវាងល្បឿនលីនេអ៊ែរ និងល្បឿនមុំ និងការបង្កើនល្បឿនតង់សង់ជាមួយល្បឿនមុំ។
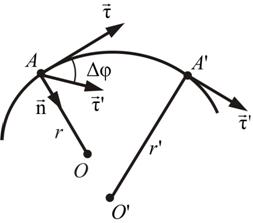
ចំណុចនីមួយៗនៃរាងកាយបង្វិលមានល្បឿនលីនេអ៊ែរខុសៗគ្នា។ ល្បឿននៃចំណុចនីមួយៗត្រូវបានដឹកនាំដោយ tangential ទៅ រង្វង់ដែលត្រូវគ្នា។ផ្លាស់ប្តូរទិសដៅរបស់វាជាបន្តបន្ទាប់។ ទំហំនៃល្បឿនត្រូវបានកំណត់ដោយល្បឿននៃការបង្វិលនៃរាងកាយនិងចម្ងាយ R នៃចំណុចនៅក្នុងសំណួរពីអ័ក្សនៃការបង្វិល។ អនុញ្ញាតឱ្យរាងកាយបត់តាមមុំមួយក្នុងរយៈពេលខ្លីមួយ (រូបភាព 2.4) ។ ចំណុចដែលស្ថិតនៅចម្ងាយ R ពីអ័ក្សធ្វើដំណើរផ្លូវស្មើ
ល្បឿនលីនេអ៊ែរពិន្ទុតាមនិយមន័យ។
ច្បាប់ទីមួយរបស់ញូតុន (ឬ ច្បាប់នៃនិចលភាព)
មានប្រព័ន្ធឯកសារយោងបែបនេះ ដែលទាក់ទងទៅនឹងសាកសពដែលផ្លាស់ប្តូរដោយឯកឯង រក្សាល្បឿនរបស់ពួកគេមិនផ្លាស់ប្តូរក្នុងទំហំ និងទិសដៅ។
ប្រព័ន្ធនិចលភាពរាប់ថយក្រោយ គឺជាប្រព័ន្ធយោងដែលទាក់ទងទៅនឹងចំណុចសម្ភារៈ ដែលគ្មានឥទ្ធិពលពីខាងក្រៅ ទាំងនៅសម្រាក ឬផ្លាស់ទី rectilinearly និងស្មើភាពគ្នា (ឧ។ ល្បឿនថេរ).
នៅក្នុងធម្មជាតិមានបួន ប្រភេទនៃអន្តរកម្ម
1. Gravitational (កម្លាំងទំនាញ) គឺជាអន្តរកម្មរវាងសាកសពដែលមានម៉ាស។
2. អេឡិចត្រូម៉ាញេទិច - ពិតសម្រាប់សាកសពដែលមានបន្ទុកអគ្គីសនី ទទួលខុសត្រូវចំពោះកម្លាំងមេកានិចដូចជាការកកិត និងការបត់បែន។
3. ខ្លាំង - អន្តរកម្មរយៈពេលខ្លី ពោលគឺវាធ្វើសកម្មភាពនៅចម្ងាយនៃលំដាប់នៃទំហំនៃស្នូល។
4. ខ្សោយ។ អន្តរកម្មបែបនេះគឺទទួលខុសត្រូវចំពោះប្រភេទអន្តរកម្មមួយចំនួនក្នុងចំណោមភាគល្អិតបឋម សម្រាប់ប្រភេទមួយចំនួននៃ β-decay និងសម្រាប់ដំណើរការផ្សេងទៀតដែលកើតឡើងនៅក្នុងអាតូម ស្នូលអាតូម។
ទម្ងន់ - គឺ លក្ខណៈបរិមាណលក្ខណៈសម្បត្តិអសកម្មនៃរាងកាយ។ វាបង្ហាញពីរបៀបដែលរាងកាយមានប្រតិកម្មទៅនឹងឥទ្ធិពលខាងក្រៅ។
កម្លាំង - គឺជារង្វាស់បរិមាណនៃសកម្មភាពរបស់រាងកាយមួយទៅមួយទៀត។
ច្បាប់ទីពីររបស់ញូតុន។
កម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយគឺស្មើនឹងផលិតផលនៃម៉ាសរាងកាយ និងការបង្កើនល្បឿនដែលផ្តល់ដោយកម្លាំងនេះ៖ F=ma
បានវាស់វែងនៅក្នុង
បរិមាណរាងកាយ, ស្មើនឹងផលិតផលម៉ាស់រាងកាយទៅនឹងល្បឿននៃចលនារបស់វាត្រូវបានគេហៅថា កម្លាំងជំរុញរាងកាយ (ឬ បរិមាណនៃចលនា) សន្ទុះនៃរាងកាយគឺជាបរិមាណវ៉ិចទ័រ។ ឯកតា SI នៃ Impulse គឺ គីឡូក្រាមម៉ែត្រក្នុងមួយវិនាទី (kg m/s).
ការបញ្ចេញមតិនៃច្បាប់ទីពីររបស់ញូតុនតាមរយៈការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃរាងកាយមួយ។
ចលនាឯកសណ្ឋាន - នេះគឺជាចលនាក្នុងល្បឿនថេរ ពោលគឺនៅពេលដែលល្បឿនមិនផ្លាស់ប្តូរ (v = const) និងការបង្កើនល្បឿនឬការបន្ថយមិនកើតឡើង (a = 0) ។
ចលនាបន្ទាត់ត្រង់ - នេះគឺជាចលនាក្នុងបន្ទាត់ត្រង់ ពោលគឺគន្លងនៃចលនា rectilinear គឺជាបន្ទាត់ត្រង់។
ចលនាបង្កើនល្បឿនឯកសណ្ឋាន - ចលនាដែលការបង្កើនល្បឿនថេរក្នុងរ៉ិចទ័រ និងទិសដៅ។