នៅក្នុងមេកានិច Newtonian បុរាណ ទំហំសាកសព និងចន្លោះពេលរវាងព្រឹត្តិការណ៍ត្រូវបានចាត់ទុកថាជាតម្លៃដាច់ខាត។ នេះមានន័យថាយើងអាចនិយាយអំពីប្រវែងនៃសាកសពដោយមិនបញ្ជាក់ថាតើរាងកាយនេះកំពុងសម្រាកឬធ្វើចលនានោះទេ។
មាត្រដ្ឋានលីនេអ៊ែរ (ប្រវែងនៃផ្នែក) និងចន្លោះពេលនៅតែមិនផ្លាស់ប្តូរនៅពេលផ្លាស់ទីពីប្រព័ន្ធយោងទី 1 ទៅមួយទៀត ពោលគឺឧ។ កុំពឹងផ្អែកលើជម្រើសនៃប្រព័ន្ធយោង។
2.Kinematics
នេះគឺជាផ្នែកនៃមេកានិចឆ្មា។ ពួកគេសិក្សាពីវិធីនៃការពិពណ៌នាអំពីចលនារបស់រាងកាយ ដោយមិនចាប់អារម្មណ៍លើមូលហេតុដែលបណ្តាលឱ្យមានចលនានេះ។
3. គន្លង
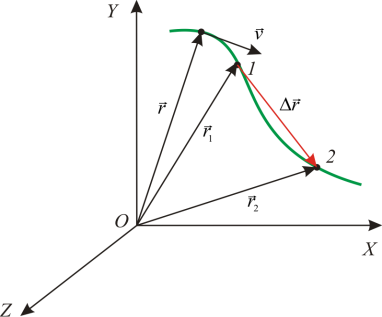
នេះគឺជាបន្ទាត់ក្នុងលំហដែលភាគល្អិតផ្លាស់ទី (ទីតាំងធរណីមាត្រនៃចុងវ៉ិចទ័រកាំនៃភាគល្អិត)
4. ផ្លាស់ទី ឃ = ឃ 2 – ឃ 1 r សម្រាប់រយៈពេលមួយ D t 1 គឺជាវ៉ិចទ័រដែលទាញចេញពីទីតាំងដំបូងទៅទីតាំងចុងក្រោយនៃភាគល្អិត (ពីចំណុច 2 ).
ដល់ចំណុច< 5. វ៉ិចទ័រល្បឿនមធ្យម>.
v< 5. វ៉ិចទ័រល្បឿនមធ្យម> វ៉ិចទ័រល្បឿនមធ្យម សម្រាប់រយៈពេលមួយ Dគឺជាវ៉ិចទ័រស្មើនឹងសមាមាត្រនៃការផ្លាស់ទីលំនៅភាគល្អិតទៅនឹងពេលវេលា D
v < 5. វ៉ិចទ័រល្បឿនមធ្យម> ដែលវាត្រូវបានប្តេជ្ញាចិត្ត: ស្របគ្នាក្នុងទិសដៅជាមួយវ៉ិចទ័រផ្លាស់ទីលំនៅឃ.
ឃ5. វ៉ិចទ័រល្បឿនមធ្យម 6. ល្បឿនភ្លាមៗ ភាគល្អិត (ឬសាមញ្ញល្បឿន ឃ) គឺជាវ៉ិចទ័រស្មើនឹងដេរីវេនៃវ៉ិចទ័រកាំ
តាមពេលវេលា៖ 5. វ៉ិចទ័រល្បឿនមធ្យមល្បឿនភ្លាមៗ ដឹកនាំ tangential ទៅគន្លងក្នុងទិសដៅនៃចលនាភាគល្អិត
7. .SI: m/sការបង្កើនល្បឿន 5. វ៉ិចទ័រល្បឿនមធ្យមត្រូវបានគេហៅថាវ៉ិចទ័រស្មើនឹងពេលវេលាដេរីវេនៃល្បឿន
ភាគល្អិត៖
8. ច្បាប់នៃចលនា
ត្រូវបានគេហៅថាពេលវេលាអាស្រ័យនៃកូអរដោនេភាគល្អិត៖
មានទំនាក់ទំនងសាមញ្ញរវាងវ៉ិចទ័រ និងវិធីសាស្ត្រសំរបសំរួលនៃការពិពណ៌នាចលនា។ វ៉ិចទ័រណាមួយអាចត្រូវបានកំណត់ដោយការព្យាកររបស់វានៅលើអ័ក្សកូអរដោនេ។ ឧទាហរណ៍ វ៉ិចទ័រកាំនៃភាគល្អិត៖ កន្លែងណា, ខ្ញុំ, j k
9. - ឯកតាវ៉ិចទ័រនៃអ័ក្សកូអរដោនេ។
ល្បឿនជាមួយនឹងវិធីសាស្រ្តសំរបសំរួលនៃការពិពណ៌នាអំពីចលនា 5. វ៉ិចទ័រល្បឿនមធ្យមល្បឿន
ដូចជាវ៉ិចទ័រណាមួយ អាចត្រូវបានតំណាងតាមរយៈការព្យាករលើអ័ក្ស DSC៖ ទាំងនោះ។ ,5. វ៉ិចទ័រល្បឿនមធ្យមល្បឿន ![]()
ភាគល្អិតអាចត្រូវបានតំណាងក្នុងទម្រង់ដូចខាងក្រោមៈ វាអាចត្រូវបានគេមើលឃើញថាសមាសធាតុល្បឿនដែលបានបង្ហាញតាមរយៈមុខងារ(សម្រាប់រយៈពេលមួយ D), x(សម្រាប់រយៈពេលមួយ D), y(សម្រាប់រយៈពេលមួយ D z
![]()
10.), ស្មើគ្នាការបង្កើនល្បឿនជាមួយនឹងវិធីសាស្រ្តសំរបសំរួលនៃការបញ្ជាក់ចលនា ការបង្កើនល្បឿនក
ដូចជាវ៉ិចទ័រណាមួយ អាចត្រូវបានតំណាងតាមរយៈការព្យាករលើអ័ក្ស DSC៖ ទាំងនោះ។ ,5. វ៉ិចទ័រល្បឿនមធ្យមដូចជាវ៉ិចទ័រណាមួយ អាចត្រូវបានតំណាងតាមរយៈការព្យាករលើអ័ក្ស DSC៖
![]()
11.ភាគល្អិតអាចត្រូវបានតំណាងក្នុងទម្រង់ដូចខាងក្រោមផ្លូវស ផ្លូវ) គឺស្មើនឹងចម្ងាយវាស់តាមគន្លង និងធ្វើដំណើរដោយភាគល្អិតកំឡុងពេលចលនារបស់វា (ប្រវែងគន្លង)។ 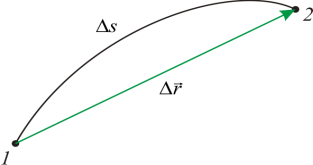
12. មាគ៌ាគឺជាបរិមាណមាត្រដ្ឋាន, មិនអវិជ្ជមាននិងមិនថយចុះ។
ការបង្កើនល្បឿនការបង្កើនល្បឿននៃភាគល្អិតសរុប
អាចត្រូវបានតំណាងជាផលបូកនៃសមាសធាតុពីរដែលកាត់កែងទៅគ្នាទៅវិញទៅមក៖ ![]()
13.ម៉ូឌុលបង្កើនល្បឿនពេញលេញ៖
ការបង្កើនល្បឿនតង់ហ្សង់ ការបង្កើនល្បឿន សម្រាប់រយៈពេលមួយ Dវ៉ិចទ័រ ការបង្កើនល្បឿនដឹកនាំ tangential ទៅគន្លងនៃភាគល្អិត; ក្នុងពេលជាមួយគ្នា 5. វ៉ិចទ័រល្បឿនមធ្យម t ការបង្កើនល្បឿនប្រសិនបើចលនាត្រូវបានពន្លឿន; 5. វ៉ិចទ័រល្បឿនមធ្យម t¯ ការបង្កើនល្បឿនប្រសិនបើចលនាយឺត។ ការបង្កើនល្បឿនតង់សង់នៃភាគល្អិតកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរនៅក្នុងម៉ូឌុលល្បឿននៃភាគល្អិត (ប្រសិនបើ
14.t = 0 ចលនាគឺឯកសណ្ឋាន) ។
ធម្មតា (កណ្តាល)
ការបង្កើនល្បឿនតង់ហ្សង់ ការបង្កើនល្បឿន ការបង្កើនល្បឿនន ការបង្កើនល្បឿន ការបង្កើនល្បឿន ^5. វ៉ិចទ័រល្បឿនមធ្យមតែងតែកាត់កែងទៅនឹងតង់សង់ទៅនឹងគន្លងនៃចលនា ពោលគឺឧ។ ការបង្កើនល្បឿន ការបង្កើនល្បឿន ^ការបង្កើនល្បឿននិង
t. ការបង្កើនល្បឿនធម្មតាកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរល្បឿនក្នុងទិសដៅ (សម្រាប់ចលនាលីនេអ៊ែរ នៅពេល = ¥, ការបង្កើនល្បឿន ការបង្កើនល្បឿន = 0)
15.រ
រាងកាយរឹង
16. នៅក្នុងមេកានិច គេហៅរាងកាយមួយ ក្នុងអំឡុងពេលចលនា ដែលចម្ងាយរវាងចំណុចទាំងពីររបស់វានៅតែមិនផ្លាស់ប្តូរ។ ដូច្នេះរាងកាយរឹងមិនខូចទ្រង់ទ្រាយនៅក្រោមឥទ្ធិពលនៃកម្លាំងខាងក្រៅ។ចំនួនដឺក្រេនៃសេរីភាពនៃរាងកាយ គឺជាចំនួនអថេរឯករាជ្យ (បរិមាណ) ដែលត្រូវតែកំណត់ដើម្បីកំណត់ទីតាំងនៃរាងកាយក្នុងលំហ។ឧទាហរណ៍។ វាអាចត្រូវបានគេមើលឃើញថាសមាសធាតុល្បឿនដែលបានបង្ហាញតាមរយៈមុខងារ, x, y).
17.ចំនួនដឺក្រេនៃសេរីភាពនៃចំណុចសម្ភារៈគឺ 3 (អថេរឯករាជ្យចំនួនបី (កូអរដោនេ)
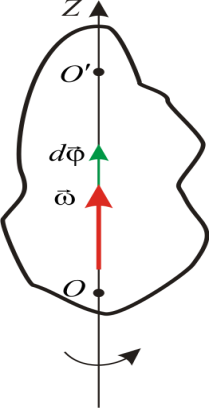
ល្បឿនមុំនៃរាងកាយ អនុញ្ញាតឱ្យរាងកាយបង្វិលជុំវិញអ័ក្សមួយ។ Z សម្រេចបានក្នុងរយៈពេលខ្លី dt វេនបឋមខ្ញុំ.ឃល្បឿនមុំនៃរាងកាយ
ហៅថាវ៉ិចទ័រ វ៉ិចទ័រវ វេនបឋមខ្ញុំស្របគ្នាក្នុងទិសដៅជាមួយវ៉ិចទ័រ វ៉ិចទ័រ, i.e. ដឹកនាំតាមអ័ក្សនៃការបង្វិលតួ ដូច្នេះវាបង្កើតជាវីសត្រឹមត្រូវជាមួយនឹងទិសដៅនៃការបង្វិលវ៉ិចទ័រ អនុញ្ញាតឱ្យរាងកាយបង្វិលជុំវិញអ័ក្សមួយ។ក្នុងមួយអ័ក្ស ![]()
![]()
និងម៉ូឌុលរបស់វា៖ វ៉ិចទ័រ
– ឯកតារង្វាស់
(រ៉ាដ្យង់ក្នុងមួយវិនាទី)
រ៉ាដ/ស
ឃ្លាល្បឿនលីនេអ៊ែរត្រូវបានប្រើនៅពេលពិចារណាពីចលនាកោងនៃរាងកាយ ហើយចង់បញ្ជាក់ពីភាពខុសគ្នារវាងល្បឿន $v\$ និងល្បឿនព្រហ្មទណ្ឌ $\omega $។ ភាគច្រើនជាញឹកញាប់ ពាក្យលីនេអ៊ែរត្រូវបានលុបចោល ហើយពួកគេគ្រាន់តែនិយាយថា ល្បឿន។
វ៉ិចទ័រល្បឿនមធ្យម
និយមន័យ សមាមាត្រនៃចលនា ($\Delta \overline(r)$) ទៅនឹងរយៈពេលដែលចលនានេះកើតឡើងត្រូវបានគេហៅថាល្បឿនមធ្យម
ចលនា ($\left\langle \overline(v)\right\rangle $)៖
\[\left\langle \overline(v)\right\rangle =\frac(\Delta \overline(r))(\Delta t)\left(1\right),\]
វ៉ិចទ័រល្បឿនមធ្យម $\left\langle \overline(v)\right\rangle $ មានទិសដៅដូចគ្នានឹងវ៉ិចទ័រ $\Delta \overline(r)$ ចាប់តាំងពី $\Delta t>0$ ។ ប្រវែងនៃផ្នែកដែលពណ៌នាវ៉ិចទ័រល្បឿនមធ្យម (រូបភាពទី 1) មិនទាក់ទងទៅនឹងប្រវែងនៃវ៉ិចទ័រ $\Delta \overline(r)$ ទេ។
ល្បឿនមធ្យមកំណត់លក្ខណៈល្បឿនដែលចំណុចផ្លាស់ទី។ លក្ខណៈនេះសំដៅលើរយៈពេលជាក់លាក់មួយ។
ប្រសិនបើរាងកាយផ្លាស់ទីតាមខ្សែកោង នោះផ្លូវ ($\Delta s$) គឺធំជាងម៉ូឌុលផ្លាស់ទីលំនៅ ($\Delta r$) សម្រាប់រយៈពេលដូចគ្នា ដោយសារប្រវែងនៃធ្នូតែងតែតិចជាងប្រវែង។ នៃអង្កត់ធ្នូចុះកិច្ចសន្យាវា (រូបភាពទី 1) ។ ផ្លូវ និងការផ្លាស់ទីលំនៅស្របគ្នានៅពេលផ្លាស់ទីក្នុងបន្ទាត់ត្រង់ក្នុងទិសដៅមួយ។ ល្បឿនជាមធ្យមនៃផ្លូវត្រូវបានកំណត់៖
\[\left\langle v\right\rangle (\rm =)\frac(\Delta s)(\Delta t)\left(2\right)\]
ល្បឿនមធ្យមកំណត់លក្ខណៈល្បឿននៃចលនានៃចំណុចសម្ភារៈក្នុងរយៈពេលកំណត់
ល្បឿនភ្លាមៗ
វ៉ិចទ័រល្បឿនមធ្យម
ដោយកាត់បន្ថយរយៈពេលដែលចលនារបស់ភាគល្អិតត្រូវបានពិចារណា ($\Delta t\ទៅ 0$) យើងទទួលបានលក្ខណៈនៃចលនានៃចំណុចមួយនៅពេលជាក់លាក់មួយនៅក្នុងពេលវេលា។ តម្លៃគឺស្មើនឹង៖
\[\overline(v)=(\mathop(\lim)_(\Delta t\to 0) \left\langle \overline(v)\right\rangle =\)(\mathop(\lim)_(\ Delta t\to 0) \frac(\Delta \overline(r))(\Delta t)=\frac(d\overline(r))(dt)\left(3\right),\)\]
ហៅ ល្បឿនភ្លាមៗឬគ្រាន់តែល្បឿន។
នៅពេលគណនាល្បឿនដោយប្រើរូបមន្ត (3) វាច្បាស់ណាស់ថាការថយចុះនៃចន្លោះពេល $\Delta t$ នាំឱ្យការពិតដែលថានៅទីបញ្ចប់តម្លៃដែលទទួលបានបន្ទាប់នៃល្បឿនមធ្យមនឹងខុសគ្នាបន្តិចបន្តួចពីគ្នាទៅវិញទៅមក។ ដូច្នេះនៅពេលស្វែងរកល្បឿនភ្លាមៗ ពួកគេឈប់នៅតម្លៃចុងក្រោយ $\Delta t,\$ ប៉ុន្តែតូច ដើម្បីអាចទទួលបានភាពត្រឹមត្រូវចាំបាច់នៃតម្លៃល្បឿន។
ការឆ្លងកាត់ទៅដែនកំណត់ (3) មានអត្ថន័យធរណីមាត្រ។ វ៉ិចទ័រ $\Delta \overline(r)$ ត្រូវបានដឹកនាំតាមអង្កត់ធ្នូដែលភ្ជាប់ចំណុចពីរនៃគន្លងការបញ្ចូលគ្នានៃចំណុចទាំងនេះនាំឱ្យការពិតដែលថាវ៉ិចទ័រនេះយកទីតាំងនៃតង់សង់ទៅគន្លងនៃចលនានៅចំណុចដែលបានផ្តល់ឱ្យ។ . វាប្រែថាវ៉ិចទ័រល្បឿនត្រូវបានដឹកនាំ tangential ទៅគន្លងចលនា។ នៅក្នុងចលនា rectilinear វ៉ិចទ័រល្បឿនត្រូវបានដឹកនាំក្នុងបន្ទាត់ត្រង់មួយ។
ល្បឿននៃការធ្វើដំណើរត្រូវបានកំណត់ដូចគ្នា៖
ប្រសិនបើគន្លងនៃចំណុចសម្ភារៈគឺជាខ្សែកោងរលោង នោះធ្នូកាន់តែខ្លី ប្រវែងរបស់វាកាន់តែជិតទៅនឹងប្រវែងអង្កត់ធ្នូ។ នៅក្នុងផ្លូវទៅកាន់ដែនកំណត់នៅ $\\Delta t\to 0$ យើងអាចសន្មត់ថា $\Delta s\to \Delta r$ ។ អាស្រ័យហេតុនេះ
ការបន្ថែមល្បឿន
ល្បឿនគឺជាបរិមាណវ៉ិចទ័រ។ ប្រសិនបើចំណុចសម្ភារៈចូលរួមក្នុងចលនាជាច្រើន នោះល្បឿនរបស់វាត្រូវបានរកឃើញជាផលបូកវ៉ិចទ័រនៃល្បឿននៃចលនានីមួយៗ៖
\[\overline(v)=\sum\limits_i((\overline(v))_i\left(6\right))\]
ក្នុងករណីខ្លះ វាជាការងាយស្រួលក្នុងការគិតពីចលនាស្មុគ្រស្មាញជា superposition នៃចលនាសាមញ្ញមួយចំនួន។ បន្ទាប់មកសមភាព (6) អាចត្រូវបានចាត់ទុកថាជាក្បួនសម្រាប់ decomposing វ៉ិចទ័រល្បឿនចូលទៅក្នុងសមាសភាគ។
ល្បឿននិងការបង្កើនល្បឿននៃចលនា
នៅពេលផ្លាស់ទីមិនស្មើគ្នា ចំណុចសម្ភារៈមានការបង្កើនល្បឿន ($\overline(a)$) ។ ការបង្កើនល្បឿនគឺជាដេរីវេដំបូងនៃល្បឿនដោយគោរពតាមពេលវេលា៖
\[\overline(a)=\frac(d\overline(v))(dt)\left(7\right)\]
ពីកន្សោម (7) វាធ្វើតាមថាការដឹងពីការបង្កើនល្បឿននៃចំណុចមួយល្បឿនត្រូវបានរកឃើញដូចជា:
\[\overline(v)=\int\limits^(t_2)_(t_1)(\overline(a)dt)\left(8\right)\]
ល្បឿនមុំ និងលីនេអ៊ែរ
នៅពេលផ្លាស់ទីក្នុងរង្វង់មួយ រួមជាមួយនឹងល្បឿននៃចលនាតាមបណ្តោយគន្លង ($v$ - ល្បឿនលីនេអ៊ែរ) ល្បឿនមុំ ($\omega $) ត្រូវបានណែនាំ ដែលកំណត់លក្ខណៈល្បឿននៃការផ្លាស់ប្តូរក្នុងមុំបង្វិល $\varphi $:
\[\omega =\frac(d\varphi)(dt)\left(9\right)\]
ទំនាក់ទំនងរវាងល្បឿនលីនេអ៊ែរ និងមុំត្រូវបានផ្តល់ដោយកន្សោម៖
ឧទាហរណ៍នៃបញ្ហាជាមួយនឹងដំណោះស្រាយ
ឧទាហរណ៍ ១
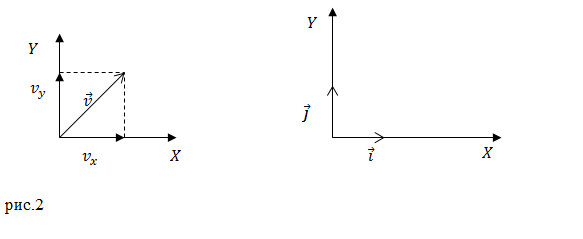
លំហាត់ប្រាណ។ការផ្លាស់ប្តូរនៅក្នុងវ៉ិចទ័រកាំដែលកំណត់ទីតាំងនៃចំណុចសម្ភារៈត្រូវបានផ្តល់ដោយសមីការ៖ $\overline(r\)\left(t\right)=t^4\overline(i)+3t^2\overline( j),$ ដែល $\ overline(i)$ និង $\overline(j)$ គឺជាវ៉ិចទ័រឯកតានៃអ័ក្ស X និង Y (រូបភាព 2) ។ តើល្បឿនភ្លាមៗនៃចំណុចនៅពេល $t=1$c គឺជាអ្វី?
ដំណោះស្រាយ។ចូរយើងកំណត់ល្បឿនភាគល្អិតដូចតទៅ៖
\[\overline(v)=(\frac(d\overline(r))(dt) \left(1.1\right)\)\]
យើងជំនួសរូបមន្ត (1.1) សមីការសម្រាប់វ៉ិចទ័រកាំ $\overline(r\)\left(t\right)=t^4\overline(i)+3t^2\overline(j),$ យើងទទួលបាន៖
\[\overline(v)=\frac(d)(dt)\left(t^4\overline(i)+3t^2\overline(j)\right)=4t^3\overline(i)+6t \overline(j)\left(1.2\right)\]
ពីសមីការ (១.២) យើងឃើញថា៖
\[\left\(\begin(array)(c) v_x=4t^3 \\ v_y=6t \end(array) \right.\left(1.3\right)\]
តាមទ្រឹស្តីបទពីថាហ្គ័រ យើងរកឃើញម៉ូឌុលល្បឿនដូចជា៖
តោះគណនាល្បឿនដោយជំនួសពេលវេលា $t=1$c ទៅក្នុងរូបមន្តលទ្ធផល៖
ចម្លើយ។$v$=7.2 $\frac(m)(s)$
ឧទាហរណ៍ ២
លំហាត់ប្រាណ។ចំណុចសម្ភារៈផ្លាស់ទីក្នុងបន្ទាត់ត្រង់មួយ។ ការបង្កើនល្បឿននៃចំណុចនេះកើនឡើងស្របតាមក្រាហ្វ (រូបភាពទី 3) ។ តើល្បឿននៃចំណុចនឹងទៅជាយ៉ាងណានៅពេល $t_1?$
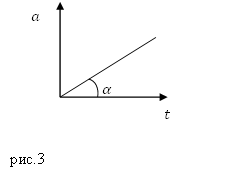
ដំណោះស្រាយ។នៅក្នុងក្រាហ្វក្នុងរូបភាពទី 3 ការបង្កើនល្បឿនត្រូវបានបង្ហាញជាបន្ទាត់ត្រង់ដែលមកពីប្រភពដើមនៃកូអរដោណេផ្អែកលើរូបទី 3 យើងសរសេរកន្សោមវិភាគសម្រាប់ការបង្កើនល្បឿនដូចជា៖
ដែល $k=tg\ alpha $ ។
យើងរកឃើញល្បឿននៃចំណុចដូចជា៖
ចម្លើយ។$v=\frac(tg\\alpha\cdot t^2_1)(2)$
កាត់បន្ថយរយៈពេលមិនកំណត់ t ក្នុងអំឡុងពេលដែល m.t ផ្លាស់ទីក្នុងលំហក្នុងដែនកំណត់នៅពេលដែល t 0 យើងទទួលបានល្បឿនភ្លាមៗពោលគឺឧ។
វ៉ិចទ័រល្បឿនភ្លាមៗគឺស្មើនឹងដែនកំណត់នៃសមាមាត្រនៃការកើនឡើងនៃវ៉ិចទ័រកាំ m.t ទៅនឹងរយៈពេលដែលការកើនឡើងនេះបានកើតឡើងនៅពេលដែល សម្រាប់រយៈពេលមួយ D 0 ឬស្មើនឹងដេរីវេទី 1 នៃវ៉ិចទ័រកាំដោយគោរពតាមពេលវេលា។
វ៉ិចទ័រល្បឿនភ្លាមៗនៅពេលកំណត់មួយត្រូវបានដឹកនាំតង់សង់ទៅគន្លងនៅចំណុចដែលបានផ្តល់ឱ្យមួយ (រូបភាព 9) ។
ជាការពិតណាស់នៅ t 0 នៅពេលដែលចំនុច M 2 ខិតជិត M 1 អង្កត់ធ្នូ (secant)  ខិតជិតប្រវែងនៃផ្នែកធ្នូ s និងក្នុងដែនកំណត់ s = ហើយផ្នែកក្លាយជាតង់សង់។ នេះត្រូវបានបញ្ជាក់យ៉ាងច្បាស់ដោយការពិសោធន៍។ ជាឧទាហរណ៍ ផ្កាភ្លើងនៅពេលសំលៀងឧបករណ៍គឺតែងតែតម្រង់ទៅកង់កិន។ ដោយសារល្បឿនគឺជាបរិមាណវ៉ិចទ័រ ម៉ូឌុលរបស់វា។
ខិតជិតប្រវែងនៃផ្នែកធ្នូ s និងក្នុងដែនកំណត់ s = ហើយផ្នែកក្លាយជាតង់សង់។ នេះត្រូវបានបញ្ជាក់យ៉ាងច្បាស់ដោយការពិសោធន៍។ ជាឧទាហរណ៍ ផ្កាភ្លើងនៅពេលសំលៀងឧបករណ៍គឺតែងតែតម្រង់ទៅកង់កិន។ ដោយសារល្បឿនគឺជាបរិមាណវ៉ិចទ័រ ម៉ូឌុលរបស់វា។
 .
.
នៅក្នុងប្រភេទឧបករណ៍បង្កើនល្បឿនមួយចំនួន (ឧទាហរណ៍ cyclotrons ។ល។) ភាគល្អិតផ្លាស់ទីម្តងហើយម្តងទៀតតាមគន្លងបិទជិតដោយមិនឈប់។ អាស្រ័យហេតុនេះ នៅចំណុចណាមួយនៃគន្លង តម្លៃដាច់ខាតនៃវ៉ិចទ័រល្បឿនភ្លាមៗត្រូវតែខុសគ្នាពីសូន្យ។ ការសន្និដ្ឋាននេះត្រូវបានបញ្ជាក់មិនត្រឹមតែដោយសមីការ (15) ប៉ុណ្ណោះទេ ប៉ុន្តែវាក៏ស្របនឹងគំនិតនៃល្បឿនមាត្រដ្ឋានមធ្យម (រូបមន្ត 11) ផងដែរ។ ប្រសិនបើនៅក្នុងសមីការ (11) យើងទៅដែនកំណត់នៅ t 0 នោះយើងនឹងត្រូវពិចារណាផ្នែកតូចៗបែបនេះនៃផ្លូវនៅលើគន្លង ដែលមិនខុសគ្នាពីម៉ូឌុលនៃវ៉ិចទ័រផ្លាស់ទីលំនៅបឋម។ . បន្ទាប់មក ដោយផ្អែកលើសមីការ (១១) យើងអាចទទួលបានតម្លៃនៃល្បឿនមាត្រដ្ឋានភ្លាមៗ 
ស្របពេលជាមួយនឹងទំហំនៃវ៉ិចទ័រល្បឿនភ្លាមៗ  ,
,
ចាប់តាំងពី r = s នៅ t 0 ។
សមីការមួយនៃវ៉ិចទ័រល្បឿនភ្លាមៗ (15) អាចត្រូវបានជំនួសដោយប្រព័ន្ធសមមូលនៃសមីការមាត្រដ្ឋានបី ការព្យាករនៃវ៉ិចទ័រល្បឿននៅលើអ័ក្សកូអរដោនេ
v x = dx/dt, v y = dy/dt, v z = dz/dt ។ (16)
វ៉ិចទ័រល្បឿនភ្លាមៗគឺទាក់ទងទៅនឹងការព្យាករណ៍របស់វានៅលើអ័ក្សកូអរដោនេដោយកន្សោម
 ,
(17)
,
(17)
កន្លែងណា  - វ៉ិចទ័រឯកតាដឹកនាំតាមអ័ក្ស X, Y, Z រៀងគ្នា។
- វ៉ិចទ័រឯកតាដឹកនាំតាមអ័ក្ស X, Y, Z រៀងគ្នា។
ម៉ូឌុល
 .
(18)
.
(18)
ដូច្នេះ វ៉ិចទ័រល្បឿនកំណត់លក្ខណៈល្បឿននៃការផ្លាស់ប្តូរចលនាក្នុងលំហក្នុងទំហំ និងទិសដៅតាមពេលវេលា។ ល្បឿនគឺជាមុខងារនៃពេលវេលា។
១.១២. ការបង្កើនល្បឿនជាមធ្យម
នៅពេលដែលសាកសពផ្លាស់ទី ល្បឿននៅក្នុងករណីទូទៅអាចផ្លាស់ប្តូរទាំងនៅក្នុងរ៉ិចទ័រ និងទិសដៅ។
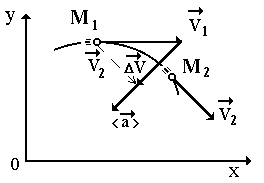
អនុញ្ញាតឱ្យ m.t ក្នុងពេលណាមួយ t 1 នៅចំណុច M 1 ហើយផ្លាស់ទីក្នុងល្បឿន  ហើយនៅពេល t 2 - នៅចំណុច M 2 - ជាមួយនឹងល្បឿន
ហើយនៅពេល t 2 - នៅចំណុច M 2 - ជាមួយនឹងល្បឿន  (រូបភាព 10) ។
(រូបភាព 10) ។
តោះផ្លាស់ទីវ៉ិចទ័រ ស្របទៅនឹងចំណុច M 1 ដូច្នេះប្រភពដើមនៃវ៉ិចទ័រស្របគ្នា។ និង .
បន្ទាប់មកភាពខុសគ្នានៃវ៉ិចទ័រ និង គឺជាវ៉ិចទ័រនៃការផ្លាស់ប្តូរ (ការបង្កើន) នៃល្បឿនក្នុងរយៈពេលមួយ t = t 2 – t 1, i.e.
 .
(19)
.
(19)
វ៉ិចទ័របង្កើនល្បឿនជាមធ្យមគឺស្មើនឹងសមាមាត្រនៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿនទៅនឹងរយៈពេលដែលការផ្លាស់ប្តូរនេះបានកើតឡើង។
អាស្រ័យហេតុនេះ
 .
(20)
.
(20)
វ៉ិចទ័របង្កើនល្បឿនជាមធ្យមស្របគ្នានឹងទិសដៅនៃវ៉ិចទ័រនៃការផ្លាស់ប្តូរល្បឿន ហើយត្រូវបានដឹកនាំនៅខាងក្នុងកោងនៃគន្លង។
សមីការវ៉ិចទ័រមួយ (1.20) ត្រូវគ្នាទៅនឹងប្រព័ន្ធនៃសមីការមាត្រដ្ឋានបីសម្រាប់ការព្យាករនៃវ៉ិចទ័របង្កើនល្បឿនជាមធ្យមទៅលើអ័ក្សកូអរដោនេ
ម៉ូឌុលវ៉ិចទ័របង្កើនល្បឿនជាមធ្យម
 .
(22)
.
(22)
ឯកតា SI នៃការបង្កើនល្បឿនគឺម៉ែត្រក្នុងមួយវិនាទីការ៉េ។
ប្រសិនបើទំហំនៃល្បឿន (ឬទំហំនៃវ៉ិចទ័រល្បឿន) មិនផ្លាស់ប្តូរទេ ចលនាគឺឯកសណ្ឋាន នៅពេលដែលទំហំនៃល្បឿនប្រែប្រួល វាមិនស្មើគ្នា។
ឯកសណ្ឋានហៅ ចលនាដែលរាងកាយធ្វើដំណើរផ្លូវដូចគ្នាក្នុងចន្លោះពេលស្មើគ្នា. ក្នុងករណីនេះទំហំនៃល្បឿននៅតែមិនផ្លាស់ប្តូរ (ក្នុងទិសដៅល្បឿនអាចផ្លាស់ប្តូរប្រសិនបើចលនាគឺ curvilinear) ។
ត្រង់ហៅ ចលនាដែលគន្លងគឺជាបន្ទាត់ត្រង់. ក្នុងករណីនេះទិសដៅនៃល្បឿននៅតែមិនផ្លាស់ប្តូរ (ទំហំនៃល្បឿនអាចផ្លាស់ប្តូរប្រសិនបើចលនាមិនស្មើគ្នា) ។
ឯកសណ្ឋានត្រង់ហៅថាចលនាដែលមានទាំងឯកសណ្ឋាន និង rectilinear ។ ក្នុងករណីនេះ ទាំងទំហំ និងទិសដៅនៅតែមិនផ្លាស់ប្តូរ។
ក្នុងករណីទូទៅ នៅពេលដែលរាងកាយផ្លាស់ទី ទាំងទំហំ និងទិសដៅនៃវ៉ិចទ័រល្បឿនប្រែប្រួល។ ដើម្បីកំណត់លក្ខណៈថាតើការផ្លាស់ប្តូរទាំងនេះកើតឡើងលឿនប៉ុណ្ណា បរិមាណពិសេសមួយត្រូវបានប្រើ - ការបង្កើនល្បឿន។
ការបង្កើនល្បឿន – នេះគឺជាបរិមាណស្មើនឹងសមាមាត្រនៃការផ្លាស់ប្តូរល្បឿននៃរាងកាយទៅនឹងរយៈពេលនៃរយៈពេលដែលការផ្លាស់ប្តូរល្បឿននេះបានកើតឡើង។. ការបង្កើនល្បឿនជាមធ្យមដោយផ្អែកលើនិយមន័យនេះគឺ m/s²:
ការបង្កើនល្បឿនភ្លាមៗហៅ បរិមាណរាងកាយស្មើនឹងដែនកំណត់ដែលការបង្កើនល្បឿនជាមធ្យមមាននិន្នាការក្នុងចន្លោះពេលមួយ។∆t → 0, m/s²:
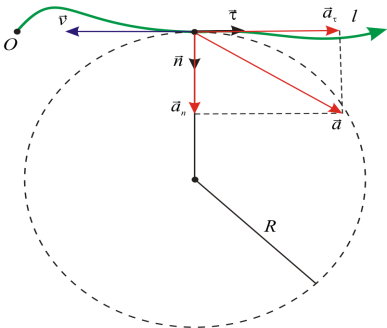
ដោយសារល្បឿនអាចផ្លាស់ប្តូរទាំងទំហំ និងទិសដៅតាមបណ្តោយគន្លង វ៉ិចទ័របង្កើនល្បឿនមានធាតុផ្សំពីរ។
ធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿន a ដែលដឹកនាំតាមតង់ហ្សង់ទៅគន្លងនៅចំណុចដែលបានផ្តល់ឱ្យត្រូវបានគេហៅថា ការបង្កើនល្បឿនតង់ហ្សង់ ដែលកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរវ៉ិចទ័រល្បឿនក្នុងរ៉ិចទ័រ។
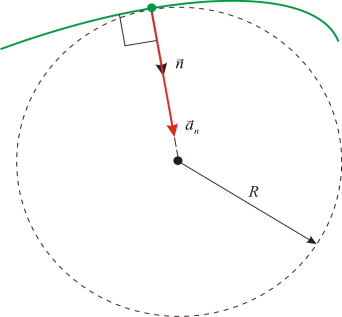
ធាតុផ្សំនៃវ៉ិចទ័របង្កើនល្បឿន a ដែលដឹកនាំតាមធម្មតាទៅតង់ហ្សង់នៅចំណុចដែលបានផ្តល់ឱ្យនៅលើគន្លង ត្រូវបានគេហៅថាការបង្កើនល្បឿនធម្មតា។ វាកំណត់លក្ខណៈនៃការផ្លាស់ប្តូរទិសដៅនៃវ៉ិចទ័រល្បឿននៅក្នុងករណីនៃចលនា curvilinear ។ តាមធម្មជាតិ នៅពេលដែលរាងកាយផ្លាស់ទីតាមគន្លងដែលជាបន្ទាត់ត្រង់ ការបង្កើនល្បឿនធម្មតាគឺសូន្យ។
ចលនា rectilinear ត្រូវបានគេហៅថាអថេរឯកសណ្ឋាន ប្រសិនបើក្នុងរយៈពេលណាមួយ ល្បឿននៃរាងកាយផ្លាស់ប្តូរដោយបរិមាណដូចគ្នា។ ក្នុងករណីនេះទំនាក់ទំនង
∆V/∆t គឺដូចគ្នាសម្រាប់ចន្លោះពេលណាមួយ។ ដូច្នេះទំហំ និងទិសដៅនៃការបង្កើនល្បឿននៅតែមិនផ្លាស់ប្តូរ៖ a = const ។
សម្រាប់ចលនា rectilinear វ៉ិចទ័របង្កើនល្បឿនត្រូវបានដឹកនាំតាមបណ្តោយបន្ទាត់នៃចលនា។ ប្រសិនបើទិសដៅនៃការបង្កើនល្បឿនស្របគ្នានឹងទិសដៅនៃវ៉ិចទ័រល្បឿន នោះទំហំនៃល្បឿននឹងកើនឡើង។ ក្នុងករណីនេះចលនាត្រូវបានគេហៅថាបង្កើនល្បឿនស្មើគ្នា។ ប្រសិនបើទិសដៅនៃការបង្កើនល្បឿនគឺផ្ទុយទៅនឹងទិសដៅនៃវ៉ិចទ័រល្បឿន នោះទំហំនៃល្បឿននឹងថយចុះ។ ក្នុងករណីនេះចលនាត្រូវបានគេហៅថាយឺតឯកសណ្ឋាន។ នៅក្នុងធម្មជាតិមានចលនាបង្កើនល្បឿនស្មើគ្នា - នេះគឺជាការធ្លាក់ចុះដោយឥតគិតថ្លៃ។
ការធ្លាក់ដោយឥតគិតថ្លៃ- បានហៅ ការដួលរលំនៃរាងកាយ ប្រសិនបើកម្លាំងតែមួយគត់ដែលធ្វើសកម្មភាពលើវាគឺជាទំនាញផែនដី. ការពិសោធន៍ដែលធ្វើឡើងដោយ Galileo បានបង្ហាញថា ក្នុងអំឡុងពេលធ្លាក់ដោយឥតគិតថ្លៃ សាកសពទាំងអស់ធ្វើចលនាដោយល្បឿនទំនាញដូចគ្នា ហើយត្រូវបានតំណាងដោយអក្សរ ĝ ។ នៅជិតផ្ទៃផែនដី ĝ = 9.8 m/s² ។ ការបង្កើនល្បឿននៃការធ្លាក់ដោយសេរីគឺបណ្តាលមកពីទំនាញផែនដី ហើយត្រូវបានតម្រង់ទិសចុះក្រោម។ និយាយយ៉ាងតឹងរឹងចលនាបែបនេះគឺអាចធ្វើទៅបានតែនៅក្នុងកន្លែងទំនេរប៉ុណ្ណោះ។ ការធ្លាក់លើអាកាសអាចត្រូវបានគេចាត់ទុកថាឥតគិតថ្លៃ។
គន្លងនៃរូបកាយធ្លាក់ចុះដោយសេរីអាស្រ័យលើទិសដៅនៃវ៉ិចទ័រល្បឿនដំបូង។ ប្រសិនបើរាងកាយត្រូវបានទម្លាក់បញ្ឈរចុះក្រោម នោះគន្លងគឺជាផ្នែកបញ្ឈរ ហើយចលនាត្រូវបានគេហៅថាអថេរឯកសណ្ឋាន។ ប្រសិនបើរាងកាយត្រូវបានបោះបញ្ឈរឡើងលើ នោះគន្លងមានពីរផ្នែកបញ្ឈរ។ ទីមួយ រាងកាយងើបឡើង ធ្វើចលនាយឺតៗ។ នៅចំណុចនៃការឡើងអតិបរិមា ល្បឿនក្លាយជាសូន្យ បន្ទាប់ពីនោះរាងកាយចុះមក រំកិលល្បឿនស្មើគ្នា។
ប្រសិនបើវ៉ិចទ័រល្បឿនដំបូងត្រូវបានដឹកនាំនៅមុំមួយទៅផ្តេក នោះចលនាកើតឡើងតាមប៉ារ៉ាបូឡា។ នេះជារបៀបដែលបាល់បោះ ថាស អត្តពលិកលោតឆ្ងាយ គ្រាប់កាំភ្លើងហោះ។ល។