Statik padu
Statik mempertimbangkan keadaan keseimbangan badan atau sistem badan. Jika jasad dalam keadaan diam ditindak oleh beberapa daya, yang arahnya bersilang pada satu titik, maka ia akan kekal dalam keadaan diam apabila jumlah (vektor) daya ini sama dengan sifar. Titik penggunaan daya boleh dianjak sepanjang garis tindakannya.
Pusat graviti jasad tegar atau sistem jasad
Setiap zarah badan dipengaruhi oleh daya graviti. Titik di mana paduan daya graviti yang bertindak pada titik individu badan dipanggil Pusat graviti. Jumlah momen graviti semua zarah badan berbanding dengan pusat graviti ialah sifar.
Jenis-jenis keseimbangan badan
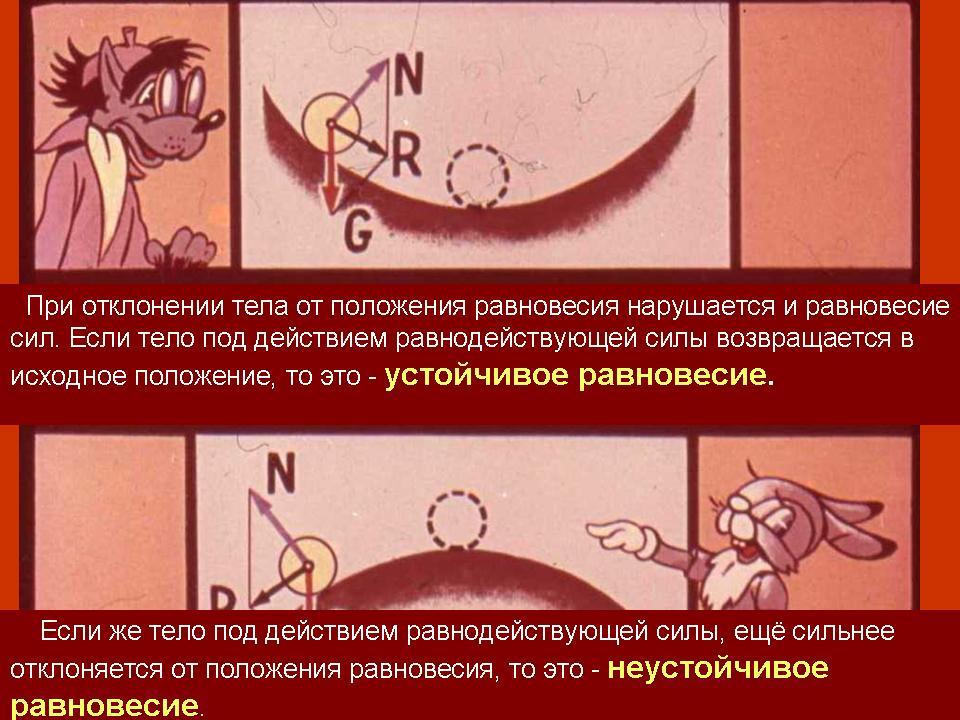
Jika, dengan sisihan badan yang cukup kecil dari kedudukan keseimbangan, timbul daya yang cenderung untuk mengembalikan badan ke kedudukan asalnya, maka keseimbangan tersebut dipanggil mampan.
Biasanya, selepas tindakan gangguan kecil (anjakan, hentakan) pada jasad yang berada dalam keseimbangan stabil, ia mula berayun dengan amplitud kecil di sekeliling kedudukan keseimbangan; getaran ini kemudiannya dilembapkan akibat geseran dan keseimbangan dipulihkan.
mengandung keseimbangan yang stabil tenaga berpotensi yang dimiliki oleh badan nilai minimum(di bawah tindakan kuasa konservatif).
Jika, dengan sisihan kecil badan secara sewenang-wenangnya dari kedudukan keseimbangan, timbul daya yang cenderung meningkatkan sisihan ini, maka kedudukan sedemikian dipanggil tidak stabil.
Dalam kedudukan keseimbangan acuh tak acuh, tiada daya timbul apabila jasad terpesong, dan kedudukan baru juga merupakan kedudukan keseimbangan.
Keadaan untuk keseimbangan pada satah condong
Untuk mengimbangi badan yang mempunyai berat P, pada satah condong, membuat sudut α dengan ufuk, anda perlu menggunakan daya F, sama dengan F 1, dan F 1 =P daya sinα F hendaklah diarahkan sepanjang satah condong (Rajah 1). Dalam kes ini, badan menekan pada satah condong dengan daya F 2 =P sinα , dan satah condong bertindak dengan daya yang sama pada jasad yang terletak di atasnya. Jasad yang berbaring bebas akan berehat di atas satah condong sehingga daya gelek menjadi lebih besar daripada daya geseran statik. Ini akan berlaku apabila tgα > k, Di mana k– pekali geseran statik.
Syarat untuk kesamaan momen daya juga terpakai kepada keseimbangan pintu (Rajah 3, a) atau win.
Blok
Bongkah tetap (Rajah 3, b) berfungsi hanya untuk menukar arah daya bertindak. Blok alih (Rajah 3, c) membolehkan anda memperoleh kekuatan. Dengan blok bergerak pegun atau berputar seragam, jumlah semua kuasa aktif dan jumlah semua momen daya adalah sama dengan sifar.
Ia mengikuti itu
Bongkah takal (Rajah 4) ialah sistem blok alih dan tetap yang disambungkan dalam pemegang biasa. Jika takal mempunyai n bongkah alih dan n bongkah tetap, maka daya F, daya pengimbang P, adalah sama F = P/2n.
Sekiranya tiada geseran, daya P, bertindak di sepanjang paksi skru, diimbangi oleh daya F dilekatkan pada pemegang (Gamb. 5):
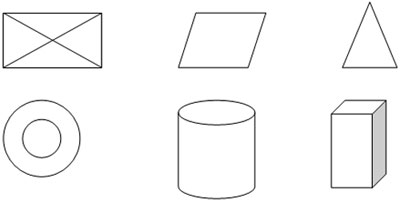
| Badan | Kedudukan pusat graviti |
|---|---|
| Batang nipis | Di tengah-tengah batang |
| Silinder atau prisma | Di tengah-tengah garis lurus yang menghubungkan pusat-pusat tapak silinder atau prisma |
| bola | Di tengah |
| Segmen rata dengan ketebalan nipis | Pada paksi simetri, diimbangi dari tapak dengan 2/5 ketinggiannya |
| Piramid atau kon | Pada segmen yang menghubungkan bahagian atas ke tengah pangkalan; dianjak sebanyak ¼ daripada segmen ini |
| Hemisfera | Pada paksi simetri, diimbangi dari pusat dengan 3/8 jejari |
| Plat segi tiga pepejal dengan ketebalan nipis | Di titik persilangan median |













![]()






 Belakang ke hadapan
Belakang ke hadapan
Perhatian! Pratonton slaid adalah untuk tujuan maklumat sahaja dan mungkin tidak mewakili semua ciri pembentangan. Jika anda berminat kerja ini, sila muat turun versi penuh.
Objektif pelajaran: Kaji keadaan keseimbangan badan, berkenalan dengan pelbagai jenis seimbang; mengetahui keadaan di mana badan berada dalam keseimbangan.
Objektif pelajaran:
- Pendidikan: Kaji dua keadaan keseimbangan, jenis keseimbangan (stabil, tidak stabil, acuh tak acuh). Ketahui dalam keadaan apa badan lebih stabil.
- Pendidikan: Menggalakkan pembangunan minat kognitif kepada fizik. Pembangunan kemahiran untuk membandingkan, membuat generalisasi, menyerlahkan perkara utama, membuat kesimpulan.
- Pendidikan: Memupuk perhatian, keupayaan untuk menyatakan pandangan seseorang dan mempertahankannya, berkembang kemahiran komunikasi pelajar.
Jenis pelajaran: pelajaran tentang pembelajaran bahan baharu dengan sokongan komputer.
peralatan:
- Cakera "Kerja dan Kuasa" daripada "Pelajaran dan Ujian Elektronik.
- Jadual "Keadaan keseimbangan".
- Mencondongkan prisma dengan garis tegak.
- Badan geometri: silinder, kubus, kon, dll.
- Komputer, projektor multimedia, papan interaktif atau skrin.
- Persembahan.
Semasa kelas
Hari ini dalam pelajaran kita akan belajar mengapa kren tidak jatuh, mengapa mainan Vanka-Vstanka sentiasa kembali ke keadaan asalnya, mengapa Menara Condong Pisa tidak jatuh?
I. Pengulangan dan pengemaskinian pengetahuan.
- Nyatakan hukum pertama Newton. Apakah syarat yang dimaksudkan oleh undang-undang?
- Apakah soalan yang dijawab oleh hukum kedua Newton? Formula dan rumusan.
- Apakah soalan yang dijawab oleh undang-undang ketiga Newton? Formula dan rumusan.
- Apakah daya paduan? Bagaimana dia terletak?
- Dari cakera "Gerakan dan interaksi badan" selesaikan tugas No. 9 "Hasil daya dengan arah yang berbeza" (peraturan untuk menambah vektor (2, 3 latihan)).
II. Mempelajari bahan baharu.
1. Apakah yang dipanggil keseimbangan?
Imbangan adalah keadaan rehat.
2. Keadaan keseimbangan.(slaid 2)
a) Bilakah badan berehat? Undang-undang apakah ini diikuti?
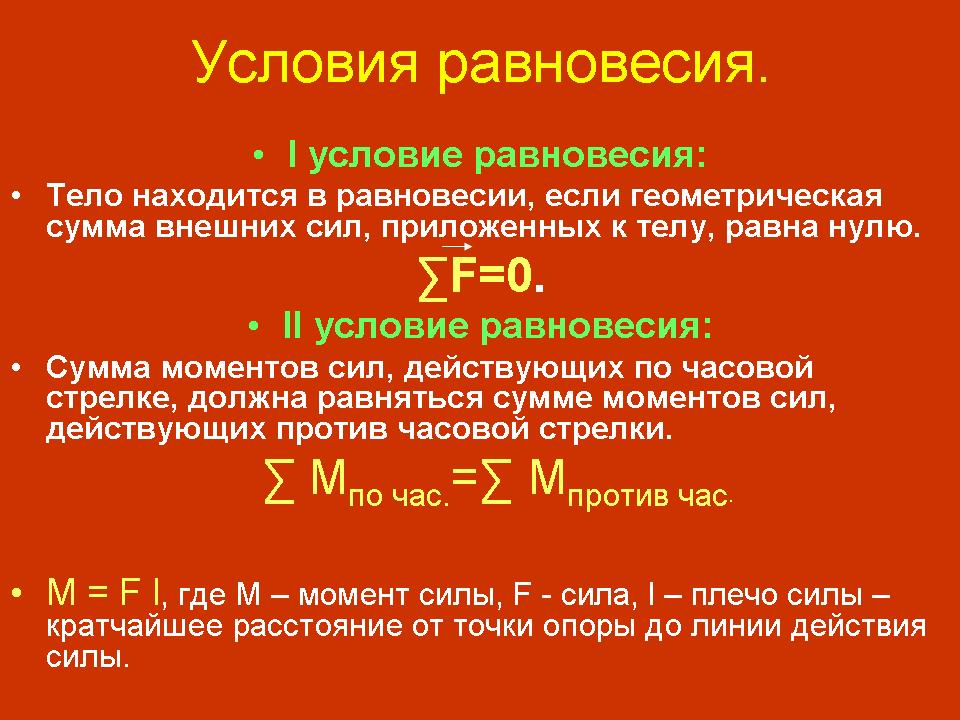
Keadaan keseimbangan pertama: Sebuah jasad berada dalam keseimbangan jika jumlah geometri daya luaran yang dikenakan pada badan adalah sifar. ∑F = 0
b) Biarkan dua bertindak di papan tulis kuasa yang sama, seperti yang ditunjukkan pada gambar.
Adakah ia akan seimbang? (Tidak, dia akan berpaling)
Pada rehat adalah sahaja titik tengah, dan selebihnya bergerak. Ini bermakna bahawa untuk badan berada dalam keseimbangan, adalah perlu bahawa jumlah semua daya yang bertindak pada setiap unsur adalah sama dengan 0.
Keadaan keseimbangan kedua: Jumlah momen daya yang bertindak mengikut arah jam mestilah sama dengan jumlah momen daya yang bertindak melawan arah jam.
∑ M ikut arah jam = ∑ M lawan jam
Momen daya: M = F L
L – lengan daya – jarak terpendek dari titik tumpu ke garis tindakan daya.
3. Pusat graviti badan dan lokasinya.(slaid 4)
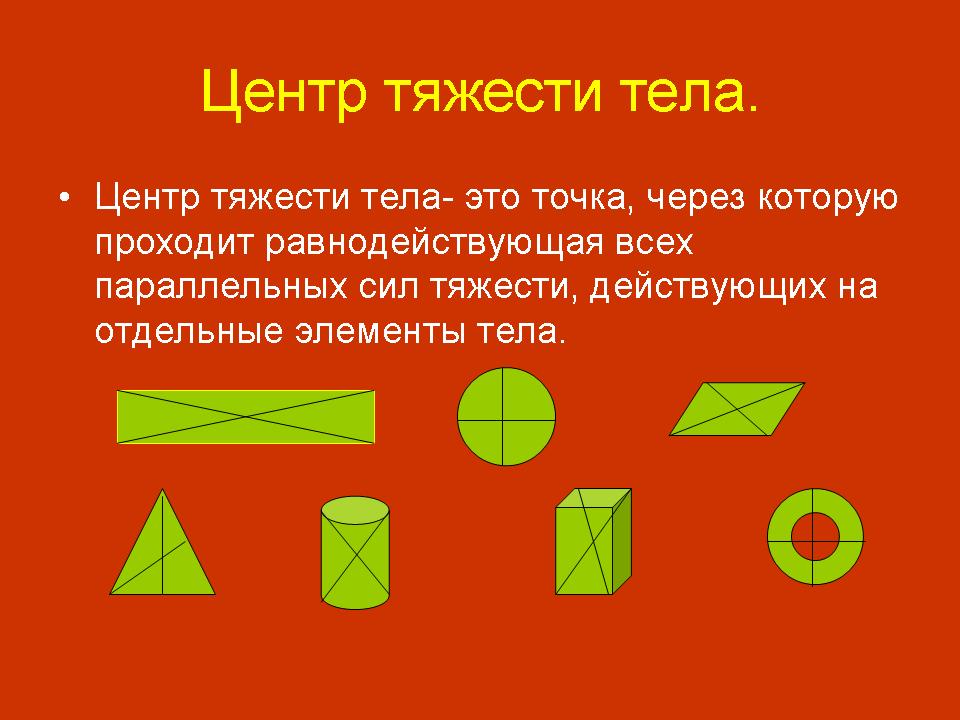
Pusat graviti badan- ini adalah titik yang dilalui oleh paduan semua daya graviti selari yang bertindak ke atas unsur-unsur individu badan (untuk sebarang kedudukan jasad di angkasa).
Cari pusat graviti bagi rajah berikut:
4. Jenis imbangan.
A) (slaid 5–8)


Kesimpulan: Keseimbangan adalah stabil jika, dengan sisihan kecil dari kedudukan keseimbangan, terdapat daya yang cenderung untuk mengembalikannya ke kedudukan ini.
Kedudukan di mana tenaga potensinya adalah minimum adalah stabil. (slaid 9)
b) Kestabilan badan yang terletak pada titik sokongan atau pada garis sokongan.(slaid 10–17)
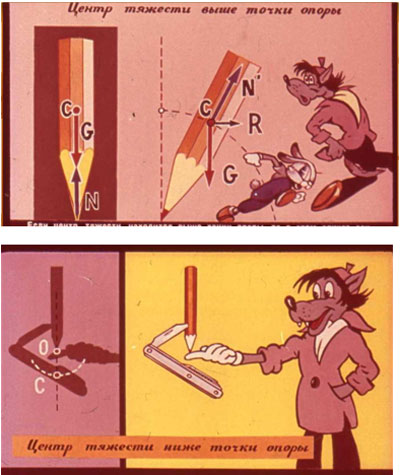
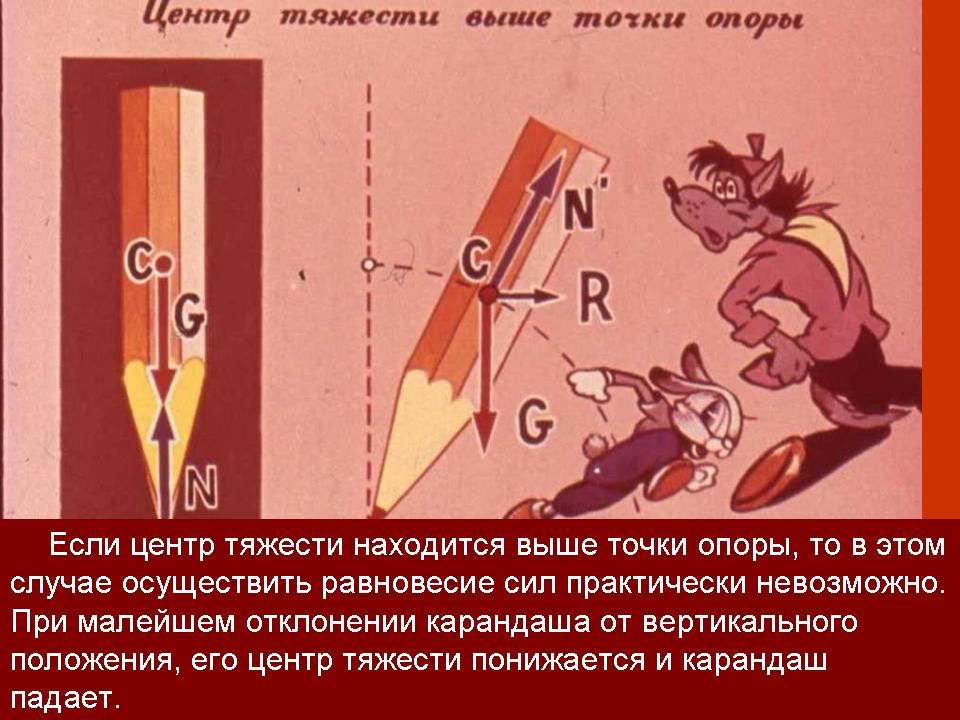
Kesimpulan: Untuk kestabilan jasad yang terletak pada satu titik atau garis sokongan, adalah perlu bahawa pusat graviti berada di bawah titik (garisan) sokongan.
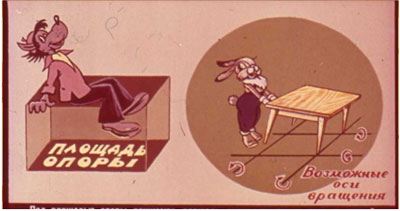
c) Kestabilan jasad yang terletak di atas permukaan rata.
(slaid 18)
1) Permukaan sokongan– ini bukan selalu permukaan yang bersentuhan dengan badan (tetapi yang dihadkan oleh garisan yang menghubungkan kaki meja, tripod)
2) Analisis slaid daripada "Pelajaran dan ujian elektronik", cakera "Kerja dan kuasa", pelajaran "Jenis baki".
Gambar 1.
- Bagaimanakah najis berbeza? (Kawasan sokongan)
- Mana satu lebih stabil? (Dengan kawasan yang lebih besar)
- Bagaimanakah najis berbeza? (Lokasi pusat graviti)
- Mana satu yang paling stabil? (Pusat graviti yang manakah lebih rendah)
- kenapa? (Kerana ia boleh dicondongkan ke sudut yang lebih besar tanpa terbalik)
3) Eksperimen dengan prisma yang memesong
- Mari letakkan prisma dengan garis paip pada papan dan mula mengangkatnya secara beransur-ansur dengan satu tepi. Apa yang kita nampak?
- Selagi garis paip bersilang dengan permukaan yang dibatasi oleh sokongan, keseimbangan dikekalkan. Tetapi sebaik sahaja garisan menegak yang melalui pusat graviti mula melangkaui sempadan permukaan sokongan, apa-apa lagi berakhir.
Analisis slaid 19–22.
![]()
Kesimpulan:
- Badan yang mempunyai kawasan sokongan terbesar adalah stabil.
- Daripada dua jasad kawasan yang sama, jasad yang pusat gravitinya terletak lebih rendah adalah stabil, kerana ia boleh dicondongkan tanpa terbalik pada sudut yang besar.
Analisis slaid 23–25.

Kapal manakah yang paling stabil? kenapa? (Di mana kargo terletak di dalam pegangan, dan bukan di geladak)

Kereta manakah yang paling stabil? kenapa? (Untuk meningkatkan kestabilan kereta apabila membelok, permukaan jalan dicondongkan ke arah pusingan.)
Kesimpulan: Keseimbangan boleh menjadi stabil, tidak stabil, acuh tak acuh. Kestabilan badan lebih besar, lebih banyak kawasan yang lebih besar penyokong dan pusat graviti yang lebih rendah.
III. Aplikasi pengetahuan tentang kestabilan badan.
- Kepakaran manakah yang paling memerlukan pengetahuan tentang keseimbangan badan?
- Pereka bentuk dan pembina pelbagai struktur (bangunan tinggi, jambatan, menara televisyen dan lain-lain.)
- Penghibur sarkas.
- Pemandu dan profesional lain.
(slaid 28–30)
- Mengapakah "Vanka-Vstanka" kembali ke kedudukan keseimbangan pada sebarang kecondongan mainan?
- Mengapa Menara Condong Pisa berdiri pada sudut dan tidak jatuh?
- Bagaimanakah penunggang basikal dan penunggang motosikal mengekalkan keseimbangan?
Kesimpulan daripada pelajaran:
- Terdapat tiga jenis keseimbangan: stabil, tidak stabil, acuh tak acuh.
- Kedudukan badan yang stabil di mana tenaga potensinya adalah minimum.
- Semakin besar kawasan sokongan dan semakin rendah pusat graviti, semakin tinggi kestabilan jasad pada permukaan rata.
Kerja rumah: § 54 – 56 (G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky)
Sumber dan literatur yang digunakan:
- G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Fizik. Darjah 10.
- Jalur Filem "Kelestarian" 1976 (diimbas oleh saya pada pengimbas filem).
- Cakera "Pergerakan dan interaksi badan" daripada "Pelajaran dan ujian elektronik".
- Cakera "Kerja dan Kuasa" daripada "Pelajaran dan Ujian Elektronik".
Jenis keseimbangan jasad pepejal ditentukan oleh tindakan graviti dalam kes sisihan kecil sewenang-wenangnya: a) keseimbangan acuh tak acuh - tindakan graviti tidak berubah; b) stabil - ia sentiasa mengembalikan badan ke kedudukan sebelumnya (sesaat kestabilan timbul); c) tidak stabil - tindakan graviti sentiasa menyebabkan badan terbalik (sekejap terbalik berlaku); d) stabil-terhad - sebelum halangan berpotensi, kedudukan badan dipulihkan (sesaat kestabilan berlaku), selepas itu badan terbalik (sesaat terbalik berlaku).
Dalam mekanik badan pepejal, terdapat tiga jenis keseimbangan : acuh tak acuh, stabil dan tidak stabil. Spesies ini berbeza dalam tingkah laku badan, sedikit menyimpang dari kedudukan seimbang. Apabila tubuh manusia benar-benar mengekalkan posenya ("pemejalan"), undang-undang keseimbangan badan tegar dikenakan padanya.
Keseimbangan Acuh tak acuh dicirikan oleh fakta bahawa, walaupun terdapat sebarang penyelewengan, keseimbangan dikekalkan. bola, silinder, kon bulat pada satah mendatar (sokongan bawah) anda boleh memusingkannya ke mana-mana cara yang anda suka dan mereka akan kekal dalam keadaan rehat . Garis tindakan graviti (G) dalam badan sedemikian (atau, seperti yang mereka katakan, ringkasnya, garis graviti) sentiasa melalui titik tumpu, bertepatan dengan garis tindakan daya tindak balas tanah (R); mereka mengimbangi antara satu sama lain. Dalam teknologi sukan, keseimbangan acuh tak acuh boleh dikatakan tidak pernah ditemui sama ada di darat atau di dalam air.
Imbangan stabil dicirikan oleh kembali ke kedudukan sebelumnya dengan sebarang penyelewengan. Ia stabil untuk sisihan kecil yang sewenang-wenangnya kerana dua sebab; a) pusat graviti badan meningkat lebih tinggi (Dh), rizab dicipta tenaga keupayaan di padang graviti; b) garis graviti (G) tidak melalui sokongan, lengan graviti (d) muncul dan momen graviti timbul (momen kestabilan M mulut = Gd), mengembalikan badan (dengan penurunan tenaga potensi) ke kedudukan sebelumnya. Keseimbangan jenis ini berlaku pada manusia dengan sokongan atas. Sebagai contoh, seorang gimnas tergantung di gelang; lengan tergantung bebas di sendi bahu. Daya graviti badan itu sendiri mengembalikan badan ke kedudukan sebelumnya.
Keseimbangan yang tidak stabil dicirikan oleh fakta bahawa tidak kira betapa kecil penyelewengan menyebabkan penyelewengan yang lebih besar dan badan itu sendiri tidak dapat kembali ke kedudukan sebelumnya. Beginilah keadaan apabila sokongan yang lebih rendah apabila badan mempunyai titik atau garis (tepi badan) sokongan. Apabila badan menyimpang: a) pusat graviti jatuh di bawah (-Dh), tenaga keupayaan dalam medan graviti berkurangan; b) garis graviti (G) dengan sisihan badan bergerak menjauhi fulcrum, bahu meningkat (d) dan momen graviti (saat terbalik M def. =Gd ); dia menyimpang badan lebih jauh dari kedudukan sebelumnya. Keseimbangan yang tidak stabil secara semula jadi adalah mustahil untuk dicapai.
DALAM latihan fizikal Satu lagi jenis baki yang paling kerap berlaku apabila terdapat kawasan sokongan yang terletak di bawah (sokongan bawah) . Dengan sedikit sisihan badan, pusat gravitinya meningkat (+Dh) dan seketika kestabilan muncul (M bibir =Gd). Terdapat tanda-tanda keseimbangan yang stabil; momen graviti badan akan mengembalikannya ke kedudukan sebelumnya. Tetapi ini berterusan hanya apabila terpesong ke had tertentu, sehingga garis graviti mencapai tepi kawasan sokongan. Dalam keadaan ini, keadaan sudah timbul keseimbangan yang tidak stabil: dengan sisihan lebih lanjut hujung badan; pada sedikit penyelewengan dalam sisi terbalik- kembali ke kedudukan sebelumnya. Sempadan kawasan sokongan sepadan dengan bucu " halangan berpotensi"(tenaga potensi maksimum). Dalam had antara halangan bertentangan (“lubang berpotensi”), keseimbangan yang sangat stabil .
2.4. Kestabilan badan tegar dan sistem badan
Kestabilan objek dicirikan oleh keupayaannya, mengatasi ketidakseimbangan, untuk mengekalkan kedudukan. Terdapat penunjuk kestabilan statik sebagai keupayaan untuk menentang ketidakseimbangan dan penunjuk dinamik sebagai keupayaan untuk memulihkan keseimbangan.
Penunjuk kestabilan statik jasad pepejal berfungsi (dalam keseimbangan stabil terhad) faktor kestabilan . Dalam Rajah. 51, A momen terbalik dicipta oleh daya terbalik (F def) yang dikenakan pada bahu (h) berbanding dengan garis hujung (O), di sekelilingnya badan melencong. Momen kestabilan relatif kepada garis terbalik yang sama berlaku dari permulaan penggunaan daya F def. Ia menjadi paling hebat pada permulaan terbalik (menghadkan momen kestabilan), kemudian lengan graviti G berkurangan dan momen kestabilan berkurangan kepada sifar (dalam kedudukan mengehadkan - graviti pusat di atas garisan terbalik).
A- pekali kestabilan badan; b, c - sudut kestabilan (a);g- kestabilan statik dan dinamik sistem badan; d - permukaan sokongan (garisan bertitik) dan kawasan sokongan berkesan (berlorek) (asal.)
Faktor kestabilan sama dengan nisbah menghadkan momen kestabilan kepada momen terbalik. Apabila pekali kestabilan badan dalam keadaan rehat sama dengan satu dan lebih daripada itu, tidak ada yang terbalik. Jika kurang daripada satu, keseimbangan tidak dapat dikekalkan.
Walau bagaimanapun, rintangan hanya dua faktor mekanikal ini (dua momen daya) untuk sistem badan, jika ia boleh menukar konfigurasi, ia tidak meletihkan gambar sebenar. Mari kita anggap bahawa ahli gusti yang menentang (Rajah 51, d), membengkokkan kakinya, merendahkan pusat graviti badannya secara menegak secara menegak. Ini tidak akan menjadikan graviti badannya mahupun bahunya, dan oleh itu momen kestabilan, tidak berubah. Tetapi jika titik aplikasi F onp berkurangan, bahu daya ini akan berkurangan, momennya akan menjadi lebih kecil. Dengan cara ini, ahli gusti boleh meningkatkan pekali kestabilan badannya dengan mengurangkan momen terbalik. Dengan mencondongkan badannya ke belakang, dia tidak akan mengubah momen terbalik, tetapi akan meningkatkan daya graviti badannya dan momen kestabilan. Di sini dia juga akan mendapat manfaat daripada kestabilan statik. Ahli gusti, menegangkan ototnya dan berehat di atas tikar, mencipta daya mendatar luaran tambahan (daya geseran) yang diarahkan ke arahnya, dengan itu mengurangkan kesan tujahan terbalik. Yang terakhir ini juga bergantung pada kesediaan otot ahli gusti untuk mengatasi aplikasi secara tiba-tiba. Tindakan menipu boleh memburukkan lagi kesediaan mereka dan menyebabkan terbalik dengan tujahan yang rendah. Perkara yang paling penting untuk sistem biomekanikal bukanlah penggunaan pasif daya graviti badan, tetapi dalam daya tarikan otot aktif yang mengekalkan dan mengubah postur badan. Dalam sistem badan, setiap pautan mestilah seimbang, mengekalkan konfigurasinya (postur badan manusia).
Akibatnya, pekali kestabilan jasad dan sistem tetap jasad mencirikan kestabilan statik sebagai keupayaan untuk menahan ketidakseimbangan. Pada manusia, apabila menentukan kestabilan, seseorang juga mesti sentiasa mengambil kira rintangan aktif daya tarikan otot dan kesediaan untuk rintangan.
Penunjuk kestabilan dinamik badan padu berfungsi sudut kestabilan . Ini adalah sudut yang dibentuk oleh garis tindakan graviti dan garis lurus yang menghubungkan pusat graviti dengan tepi yang sepadan dengan kawasan sokongan (lihat Rajah 51, b, c). Kami akan mula memesongkan badan sehingga garis graviti mencapai sempadan kawasan sokongan (kedudukan sempadan badan adalah bahagian atas halangan berpotensi). Pada badan yang diletakkan tegak (Rajah 51, b), asas kestabilan(/i) kurang daripada badan yang sama berbaring rata (/2) (lihat Rajah 51, V). Ini bermakna bahawa garis graviti lebih dekat dengan sempadan di mana terbalik akan bermula. Pusat graviti mesti dinaikkan untuk terbalik dalam kes pertama ke ketinggian yang lebih rendah (Dh 1) berbanding dengan yang kedua (Dh 2) Sudut kestabilan dalam kes pertama (a 1) jelas kurang daripada yang kedua (a 2).
Makna fizikal sudut kestabilan adalah bahawa ia sama dengan sudut pusing (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Jumlah dua sudut kestabilan dalam satu satah dianggap sebagai sudut keseimbangan dalam pesawat ini. Ia mencirikan margin kestabilan dalam satah tertentu, iaitu, ia menentukan julat pergerakan pusat graviti sebelum kemungkinan terbalik dalam satu arah atau yang lain (contohnya, untuk slalomist semasa bermain ski, gimnas pada balok imbangan, ahli gusti dalam posisi berdiri).
Dalam kes keseimbangan sistem biomekanikal Untuk menggunakan penunjuk kestabilan dinamik, penjelasan penting mesti diambil kira.
pertama, kawasan sokongan yang berkesan orang itu tidak selalu bertepatan dengan permukaan sokongan. Pada seseorang, seperti dalam badan pepejal, permukaan sokongan dihadkan oleh garisan yang menghubungkan titik sokongan yang melampau (atau tepi luar beberapa kawasan sokongan) (lihat Rajah 51, d). Tetapi pada manusia, sempadan kawasan sokongan berkesan sering terletak di dalam kontur sokongan, kerana tisu lembut (kaki berkaki ayam) atau pautan lemah (falang hujung jari dalam dirian tangan di atas lantai) tidak dapat mengimbangi memuatkan. Oleh itu, garisan hujung bergerak ke dalam dari tepi permukaan sokongan, Kawasan sokongan berkesan adalah kurang daripada luas permukaan sokongan.
Kedua, seseorang tidak pernah menyimpang seluruh badannya berbanding garis terbalik (seperti kiub), tetapi bergerak relatif kepada paksi mana-mana sendi tanpa mengekalkan posturnya sepenuhnya (contohnya, apabila berdiri, terdapat pergerakan pada sendi buku lali) .
Ketiga, apabila menghampiri kedudukan sempadan, ia sering menjadi sukar untuk mengekalkan postur dan bukan sahaja terbalik "badan yang mengeras" di sekitar garis terbalik berlaku, tetapi perubahan postur dengan kejatuhan. Ini berbeza dengan ketara daripada pesongan dan terbalik badan tegar di sekeliling tepi terbalik (condong).
Oleh itu, sudut kestabilan dalam keseimbangan terhad-stabil mencirikan kestabilan dinamik sebagai keupayaan untuk memulihkan keseimbangan. Apabila menentukan kestabilan tubuh manusia, ia juga perlu diambil kira sempadan kawasan sokongan yang berkesan, kebolehpercayaan mengekalkan postur kepada kedudukan menghadkan badan dan garisan tipping sebenar.
Dalam latihan fizikal, ikatan pegangan (tegar) adalah perkara biasa. Kemudian syarat untuk mengekalkan keseimbangan memerlukan mengambil kira gandingan dua hala dengan mempertimbangkan daya reaktif sepadan yang disebabkan oleh gandingan tersebut.
3. PEMELIHARAAN DAN PEMULIHAN KEDUDUKAN BADAN MANUSIA
Seseorang bukan sahaja dapat mengekalkan keseimbangan, tetapi juga memulihkannya dalam kes gangguan. Perbezaan antara keseimbangan sistem biomekanik dan keseimbangan badan fizikal pepejal tidak terletak pada kehadiran undang-undang khas mekanik untuk sistem hidup, tetapi dalam penggunaannya yang lebih kompleks disebabkan oleh ciri-ciri sistem hidup.