Если траектория движения материальной точки представляет собой кривую линию, то такое движение мы будем называть криволинейным.
При таком движении изменяется как по величине, так и по направлению. Следовательно, при криволинейном движении .
 Рассмотрим движение материальной точки по криволинейной траектории (рис. 2.11). Вектор скорости движения в любой точке траектории направлен по касательной к ней. Пусть в точке M 0 скорость , а в точке М – . При этом считаем, что промежуток времени Dt при переходе из точки М 0 в точку М настолько мал, что изменением ускорения по величине и направлению можно пренебречь.
Рассмотрим движение материальной точки по криволинейной траектории (рис. 2.11). Вектор скорости движения в любой точке траектории направлен по касательной к ней. Пусть в точке M 0 скорость , а в точке М – . При этом считаем, что промежуток времени Dt при переходе из точки М 0 в точку М настолько мал, что изменением ускорения по величине и направлению можно пренебречь.
 Вектор изменения скорости . (В данном случае разность 2 х векторов и будет равна ). Разложим вектор , который характеризует изменение скорости как по величине, так и по направлению на две составляющие и . Составляющая , которая является касательной к траектории в точке М 0 ,характеризует изменение скорости по величине за время Dt, в течение которого была пройдена дуга М 0 М и называется тангенциальной
составляющей вектора изменения скорости (). Вектор , направленный в пределе, когда Dt ® 0, по радиусу к центру, характеризует изменение скорости по направлению и называется нормальной составляющей вектора изменения скорости ().
Вектор изменения скорости . (В данном случае разность 2 х векторов и будет равна ). Разложим вектор , который характеризует изменение скорости как по величине, так и по направлению на две составляющие и . Составляющая , которая является касательной к траектории в точке М 0 ,характеризует изменение скорости по величине за время Dt, в течение которого была пройдена дуга М 0 М и называется тангенциальной
составляющей вектора изменения скорости (). Вектор , направленный в пределе, когда Dt ® 0, по радиусу к центру, характеризует изменение скорости по направлению и называется нормальной составляющей вектора изменения скорости ().
Таким образом, вектор изменения скорости равен сумме двух векторов ![]() .
.
Тогда можно записать, что
При бесконечном уменьшении Dt®0 угол Da при вершине DM 0 АС будет стремиться к нулю. Тогда вектором можно пренебречь по сравнению с вектором , а вектор
![]()
будет выражать тангенциальное ускорение и характеризовать быстроту изменения скорости движения по величине. Следовательно, тангенциальное ускорение численно равно производной от модуля скорости по времени и направлено по касательной к траектории.
Вычислим теперь вектор , называемый нормальным ускорением . При достаточно малом Dt участок криволинейной траектории можно считать частью окружности. В этом случае радиусы кривизны M 0 O и MO будут равны между собой и равны радиусу окружности R.
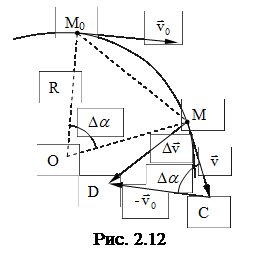
Повторим рисунок. ÐМ 0 ОМ = ÐМСD, как углы со взаимно перпендикулярными сторонами (рис. 2. 12). При малом Dt можно считать |v 0 |=|v|, поэтому DМ 0 ОМ = DМDC подобны как равнобедренные треугольники с одинаковыми углами при вершине.
Поэтому из рис. 2.11 следует
 Þ ,
Þ ,
но DS = v ср. ×Dt, тогда .
Переходя к пределу при Dt ® 0 и учитывая, что при этом v ср. = v находим
 , т.е. (2.5)
, т.е. (2.5)
Т.к. при Dt ® 0 угол Da ® 0, то направление этого ускорения совпадает с направлением радиуса R кривизны или с направлением нормали к скорости , т.е. вектор . Поэтому это ускорение часто называют центростремительным . Оно характеризует быстроту изменения скорости движения по направлению.
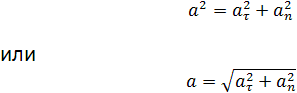
Полное ускорение определяется векторной суммой тангенциального и нормального ускорений (рис. 2.13). Т.к. вектора этих ускорений взаимно перпендикулярны , то модуль полного ускорения равен  ; Направление полного ускорения определяется углом j между векторами и :
; Направление полного ускорения определяется углом j между векторами и :
Кинематика вращательного движения.
Угловая скорость.
ОПРЕДЕЛЕНИЕ: Вращательным движением будем называть такое движение, при котором все точки абсолютно твердого тела описывают окружности, центры которых лежат на одной прямой, называемой осью вращения.
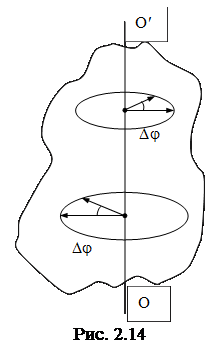 В качестве координаты, определяющей положение точки при вращательном движении, берут угол, характеризующий мгновенное положение радиус-вектора, проведенного из центра вращения к рассматриваемой точке (рис. 2.14)
В качестве координаты, определяющей положение точки при вращательном движении, берут угол, характеризующий мгновенное положение радиус-вектора, проведенного из центра вращения к рассматриваемой точке (рис. 2.14)
Для характеристики вращательного движения вводится понятие угловой скорости
Вектор направлен вдоль оси, вокруг которой вращается тело в сторону, определяемую правилом правого винта (рис. 2.15).
Модуль вектора угловой скорости равен . Если = const, то такое движение называется равномерным, при этом , следовательно и при t 0 = 0 получаем .
Если j 0 = 0, то j = w·t или .
Таким образом, при равномерном движении w показывает на какой угол поворачивается тело за единицу времени. Размерность угловой скорости [w ]=рад/сек.
Равномерное вращение можно характеризовать периодом вращения T, под которым понимают время, за которое тело делает один полный оборот, т.е. поворачивается на угол 2p. В этом случае , следовательно .
Частота вращения (число оборотов в единицу времени): n=1/T=w/2p. Отсюда w=2pn.
Дополнение 1.
Поворот тела на некоторый малый угол dj можно задать в виде отрезка, длина которого равна dj, а направление совпадает с осью, вокруг которой совершен поворот. Таким образом, повороту тела можно приписать некоторое численное значение и направление. При этом направление вектора можно определить, связав его с направлением вращения тела. Такие вектора называются аксиальными или псевдовекторами, в отличие от истинных или полярных векторов, для которых направление определяется естественным образом ( , , и т. д.), при операции инверсии системы координат(x → -x’, y → -y’, z → -z’) последние меняют знак на противоположный: .
Вектор угловой скорости может изменяться как за счет изменения скорости вращения тела вокруг оси (в этом случае он изменяется о величине), так и за счет поворота оси вращения в пространстве (в этом случае изменяется по направлению). Для характеристики быстроты изменения вводится физическая величина , называемая угловым ускорением .
ОПРЕДЕЛЕНИЕ: Средним угловым ускорением называется величина , где Dt – промежуток времени за который произошло изменение угловой скорости.
ОПРЕДЕЛЕНИЕ: Мгновенным ускорением называется величина равная ;
Если направление оси вращения в пространстве постоянно, то угловая скорость изменяется только по величине и в этом случае  .
.
Если под e понимать проекцию вектора на направление , то последняя формула примет вид ![]() . Здесь e – алгебраическая величина и
. Здесь e – алгебраическая величина и
если w , то e>0 (векторы и одного направления),
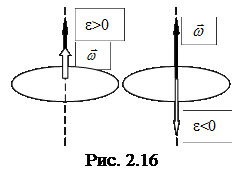 если w ¯, то e<0 ( ¯ ).
если w ¯, то e<0 ( ¯ ).
1) Если e>0 Þ вращение равноускоренное ( ) (рис. 2.16).
2) Если e<0 – ( ¯ ) (рис. 2.16).
В системе СИ [e]=рад/с 2 .
Для равноускоренного движения:
Следовательно, w = w 0 + e·(t - t 0) . При t 0 = 0 получаем w = w 0 + e·t.
Окончательно
Теперь установим
Движение точки характеризуется также ускорением-быстротой изменения скорости. Если скорость точки за произвольное время изменяется на величину , то величина
Называется средним ускорением точки за это время. Ускорение в данный момент времени:
т.е. вектор равен производной по времени. Направление вектора совпадает с направлением приращения скорости за . Поскольку, , то ускорение точки можно записать как вторую производную по времени от радиуса-вектора:
Вектор ускорения можно разложить по компонентам: ![]() ; где
; где ![]() , соответственно, …проекции ускорения на оси координат.
, соответственно, …проекции ускорения на оси координат.
Если траектории точки плоская кривая, то для описания движения можно выбрать два перпендикулярные друг к другу направления: касательной к траектории (орт ) и нормали к ней (орт ). Тогда раскладывается по составляющим .
Поскольку вектор скорости , то подставив сюда элементарное перемещение ![]() , получим для скорости: .
, получим для скорости: .
Тогда для ускорения точки можно записать:
![]() ;
;
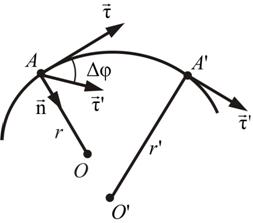
Из рис. видно, что есть разность векторов и . Видно, что есть приращение орта касательной к траектории, соответствующее элементарному пути за время .

| |
При перемещении по траектории на длину единичный вектор поворачивается на угол . Из равнобедренного треугольника векторов ![]() , ввиду малости ;
, ввиду малости ;
По направлению совпадает с ортом : при вектор становится перпендикулярным . Тогда производная:
И полное ускорение точки
Отсюда видно, что - касательное (тангенциальное) ускорение характеризует быстроту изменения модуля скорости. При ускоренном движении и совпадает с , при замедленном и противоположно .
Нормальное ускорение характеризует быстроту изменения направления вектора скорости. Оно направлено к центру кривизны траектории; ; поэтому его также называют центростремительным. При прямолинейном движении .
Модуль полного ускорения
При ускоренном движении угол острый, рис. , при замедленном - тупой ( угол между и ). Если точка движется по окружности равномерно, т.е. , то и , т.е. перпендикулярно касательной к траектории.
Динамика поступательного движения
Поступательное движение
Простейшим видом механического движения твердого тела является поступательное движение, при котором прямая, соединяющая любые две точки тела перемещается вместе с телом, оставаясь параллельной| своему первоначальному положению (шарик на пружине относительно Земли, поршень в цилиндре стационарного двигателя, лифт, резец токарного станка и др.). Траектории всех точек тела одинаковы. Радиусы - векторы всех точек тела за время изменяется на одну и ту же величину , скорости всех точек и их ускорения одинаковы:
; ![]()
т.е. для описания движения можно взять одну точку тела; если при этом , то и тогда, интегрируя, находим скорость точки:
; Затем, интегрируя скорость , найдем координату:
Закон инерции.
В основе классической механики лежат три закона Ньютона, сформулированные им в сочинении «Математические начала натуральной философии», опубликованном в 1687г. Эти законы явились результатом гениального обобщения опытных данных и теоретических закономерностей в области механики, которые были установлены Ньютоном, а также Кеплером. Галилеем, Гюйгенсом. Гуком и др.
В качестве первого закона динамики Ньютон принял закон, установленный еще Галилеем:
Всякое тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока внешнее воздействие не заставит изменить это состояние.
Этот закон утверждает, что для состояния покоя или равномерного прямолинейного движения не требуется внешних воздействий. В этом проявляется особое динамическое свойство тел, называемое инертностью. Поэтому первый закон Ньютона называют также законом инерции, а движение тела в отсутствии внешних воздействий, движением по инерции.
В этой формулировке закона считается, что тело не деформируется, т.е. оно абсолютно твердое, и что оно движется поступательно. Однако, твердое тело может еще равномерно вращаться по инерции, обладая при этом ускорением. Необходимость во всех этих оговорках отпадает, если в первом законе Ньютона говорить не о теле, а о материальной точке, которая по определению не может ни деформироваться, ни вращаться.
Поэтому для материальной точки пользуются формулировкой:
материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока внешнее воздействие не выведет её из этого состояния.
Мерность пространства
Под мерностью понимают количество замеров, которые следует сделать для однозначного определения места некоторой точки. Так, чтобы однозначно определить место точки в пространстве в фиксированный момент времени, необходимо и достаточно указать три ее координаты. В наиболее привычной прямоугольной декартовой системе координат это х, у, z -
длина, ширина и высота (рис. 5.2, α); в сферической системе координат требуется указать радиус-вектор r
и углы α и β (рис. 5.2, б);
в цилиндрической системе - высоту h,
радиус-векторr
и угол α (рис. 5.2, в).
Считается, что все материальные процессы и взаимодействия реализуются именно в пространстве трех измерений. В одномерном (линия) или двухмерном (плоскость) пространстве не могут происходить взаимодействия частиц и полей. Три измерения являются необходимым и достаточным минимумом, в рамках которого могут осуществляться все типы взаимодействий материальных объектов.
В настоящее время не известно каких-либо форм движения и взаимодействия, которые требовали бы четырех- или пятимерного пространства, и возможность таких процессов не вытекает ни из каких установленных законов природы.
В литературе нередки рассуждения о возможности существования пространств большего количества измерений. Так, в последнее время была выдвинута гипотеза о реальных 11 измерениях в области микромира в первые моменты рождения нашей Вселенной: 10 - пространственных и одно - временное; затем они образуют 4-мерный пространственно-временной континуум. Эта гипотеза связана со следующими обстоятельствами. В математике и физике широкое применение получило представление о многомерных (n
-мерных) пространствах. Данная математическая абстракция играет важную роль. Каждая координата многомерного пространства может указывать на какое-то любое свойство рассматриваемой физической реальности - температуру, плотность, скорость, массу и т.д. Если число таких параметров вместе с пространственно-временными характеристиками равно п,
то считается, что они образуют «-мерное пространство, а конкретные значения свойств определяются как точки в «-мерном пространстве. При достаточно большом количестве свойств и взаимосвязанных переменных можно прийти к понятию многомерного и даже бесконечномерного пространства. Однако понятие пространства здесь имеет условный характер, так как применяется для характеристики совершенно других свойств.
Мерность времени
Что касается мерности времени, то чаще всего указывают на его одномерность: для определения времени достаточно задать одну координату. По мнению С.Т. Мелюхина, если бы время имело не одно, а два, три измерения и больше, то это означало бы, что параллельно нашему миру существуют аналогичные и никак не связанные с нашим миры-двойники, в которых те же события разворачиваются в той же последовательности. Соответственно у каждого человека должны были бы существовать двойники в каждом из параллельных миров. Но для таких предположений нет оснований.
Другой точки зрения придерживается российский географ Ю.Г. Симонов. Он полагает, что вполне возможно предложить двухмерную модель времени, полезную для описания и изучения некоторого класса событий, и рассматривает ее на примере некоторых географических явлений. Здесь следует вспомнить о двух типах времени - солнечном и лунном. С фазами лунного и солнечного календарей могут быть связаны различные события. Известно, что эти векторы времени независимы и не совпадают по фазам, а их периоды не являются кратными друг другу. Так, изучая явления на Земле, можно отыскать среди них те, которые связаны лишь с гравитационными полями Земля - Луна и Земля - Солнце. Эти поля могут накладываться друг на друга, то суммируясь, то вычитаясь. В таком случае можно говорить об изучении гравитационной системы из трех тел. В такой системе количество векторов времени совпадает с количеством степеней свободы. Пусть в пространстве двух векторов времени ось х
совпадает с вектором солнечного времени, а ось у -
с лунным. В фазу новолуния силы лунного и солнечного притяжений складываются, а в фазу полнолуния - вычитаются. Поэтому в фазу новолуния максимальные гравитационные возмущения испытывают Земля и Солнце, а в фазу полнолуния - Луна и Солнце; минимум гравитационной напряженности Земли приходится на полнолуние, когда гравитационные поля вычитаются. Таким образом, на Земле гравитационная напряженность нарастает от полнолуния к новолунию, а затем убывает. При нарастании гравитационной волны возникают одни эффекты, а на фоне убывания (снятия) напряженности - другие. Так, тектонические трещины в разные фазы сжимаются и расширяются; процессы, связанные с трещинно-поровым давлением грунтовых вод, протекают с разной силой и т.д.
В общем случае, по мысли Симонова, векторов времени может быть не два, а больше. Выбор модели многомерного времени (в частности, определение количества временных векторов) удается осуществить довольно просто в том случае, когда изучаемые процессы причинно не зависят друг от друга и их можно представить себе как циклически проявляющиеся, причем циклы могут длиться не часами и сутками, а годами, столетиями и даже тысячелетиями.
Ускорение
Ускорение – это величина, которая характеризует быстроту изменения скорости.
Например, автомобиль, трогаясь с места, увеличивает скорость движения, то есть движется ускоренно. Вначале его скорость равна нулю. Тронувшись с места, автомобиль постепенно разгоняется до какой-то определённой скорости. Если на его пути загорится красный сигнал светофора, то автомобиль остановится. Но остановится он не сразу, а за какое-то время. То есть скорость его будет уменьшаться вплоть до нуля – автомобиль будет двигаться замедленно, пока совсем не остановится. Однако в физике нет термина «замедление». Если тело движется, замедляя скорость, то это тоже будет ускорение тела, только со знаком минус (как вы помните,скорость
– это векторная величина).
Среднее ускорение
Среднее ускорение> – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:
где – вектор ускорения .
Направление вектора ускорения совпадает с направлением изменения скорости Δ = - 0 (здесь 0 – это начальная скорость, то есть скорость, с которой тело начало ускоряться).
В момент времени t1 (см. рис 1.8) тело имеет скорость 0 . В момент времени t2 тело имеет скорость . Согласно правилу вычитания векторов найдём вектор изменения скорости Δ = - 0 . Тогда определить ускорение можно так:
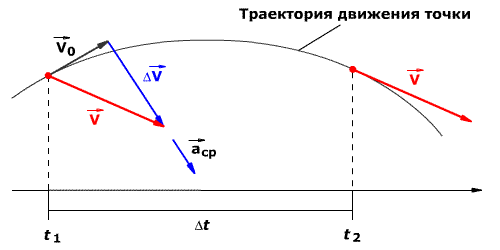
Рис. 1.8. Среднее ускорение.
В СИ единица ускорения – это 1 метр в секунду за секунду (или метр на секунду в квадрате), то есть
Метр на секунду в квадрате равен ускорению прямолинейно движущейся точки, при котором за одну секунду скорость этой точки увеличивается на 1 м/с. Иными словами, ускорение определяет, насколько изменяется скорость тела за одну секунду. Например, если ускорение равно 5 м/с 2 , то это означает, что скорость тела каждую секунду увеличивается на 5 м/с.
Мгновенное ускорение тела (материальной точки) в данный момент времени – это физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю. Иными словами – это ускорение, которое развивает тело за очень короткий отрезок времени:
Направление ускорения также совпадает с направлением изменения скорости Δ при очень малых значениях промежутка времени, за который происходит изменение скорости. Вектор ускорения может быть задан проекциями на соответствующие оси координат в данной системе отсчёта (проекциями а Х, a Y , a Z).
При ускоренном прямолинейном движении скорость тела возрастает по модулю, то есть
V 2 > v 1
а направление вектора ускорения совпадает с вектором скорости 2 .
Если скорость тела по модулю уменьшается, то есть
V 2 < v 1
то направление вектора ускорения противоположно направлению вектора скорости 2 . Иначе говоря, в данном случае происходит замедление движения , при этом ускорение будет отрицательным (а < 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
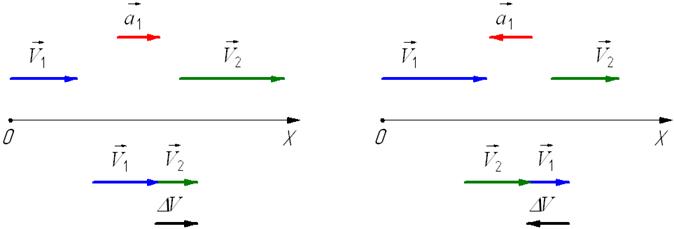
Рис. 1.9. Мгновенное ускорение.
При движении по криволинейной траектории изменяется не только модуль скорости, но и её направление. В этом случае вектор ускорение представляют в виде двух составляющих (см. следующий раздел).
Тангенциальное ускорение
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Рис. 1.10. Тангенциальное ускорение.
Направление вектора тангенциального ускорения τ (см. рис. 1.10) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение
Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой n . Вектор нормального ускорения направлен по радиусу кривизны траектории.
Полное ускорение
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов : = τ + n
Тангенциальное(касательное) ускорение -это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Направление вектора тангенциального ускорения a лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение - это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела.
 Вектор
перпендикулярен линейной скорости движения, направлен по радиусу кривизны траектории.
Вектор
перпендикулярен линейной скорости движения, направлен по радиусу кривизны траектории.
Формула скорости при равноускоренном движении
Поступательное и вращательное движение твердого тела.
Поступательное движение
- движение, при котором все точки тела движутся по одинаковым траекториям.
Поступательное движение бывает двух типов: равномерное и неравномерное.
Вращательное движение – это движение тела вокруг некоторой оси. При таком движении все точки тела совершают движение по окружностям, центром которых является эта ось.
Угловая скорость. Угловое ускорение .
Угловая скорость - векторная величина, являющаяся псевдовектором (аксиальным вектором) и характеризующая скорость вращения материальной точки вокруг центра вращения. Вектор угловой скорости по величине равен углу поворота точки вокруг центра вращения за единицу времени:
![]()
Угловое ускорение - псевдовекторная физическая величина, равная первой производной от псевдовектора угловой скорости по времени
Угловое ускорение характеризует интенсивность изменения модуля и направления угловой скорости при движении твердого тела
![]()
Связь линейной скорости с угловой и тангенциального ускорения с угловым.
Отдельные точки вращающегося тела имеют различные линейные скорости . Скорость каждой точки, будучи направлена по касательной к соответствующей окружности, непрерывно изменяет свое направление. Величина скорости определяется скоростью вращения тела и расстоянием R рассматриваемой точки от оси вращения. Пусть за малый промежуток времени тело повернулось на угол (рис.2.4). Точка, находящаяся на расстоянии R от оси проходит при этом путь, равный
Линейная скорость точки по определению.
Первый закон Ньютона (или закон инерции )
Существуют такие системы отсчета, относительно которых изолированные поступательно движущиеся тела сохраняют свою скорость неизменной по модулю и направлению.
Инерциальной системой отсчёта является такая система отсчёта, относительно которой материальная точка, свободная от внешних воздействий, либо покоится, либо движется прямолинейно и равномерно (т.е. с постоянной скоростью).
В природе существуют четыре вида взаимодействия
1. Гравитационное (сила тяготения) – это взаимодействие между телами, которые обладают массой.
2. Электромагнитное- справедливо для тел, обладающих электрическим зарядом, ответственно за такие механические силы, как сила трения и сила упругости.
3.Сильное- взаимодействие короткодействующее, то есть действует на расстоянии порядка размера ядра.
4. Слабое. Такое взаимодействие ответственно за некоторые виды взаимодействия среди элементарных частиц, за некоторые виды β-распада и за другие процессы, происходящие внутри атома, атомного ядра.
Масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие.
Сила – является количественной мерой действия одного тела на другое.
Второй закон Ньютона.
Сила, действующая на тело, равна произведению массы тела на сообщаемое этой силой ускорение: F=ma
Измеряется в
Физическая величина, равная произведению массы тела на скорость его движения, называется импульсом тела (или количеством движения ). Импульс тела – векторная величина. Единицей измерения импульса в СИ является килограмм-метр в секунду (кг·м/с) .
Выражение второго закона Ньютона через изменение импульса тела
Равномерное движение – это движение с постоянной скоростью, то есть когда скорость не изменяется (v = const) и ускорения или замедления не происходит (а = 0).
Прямолинейное движение – это движение по прямой линии, то есть траектория прямолинейного движения – это прямая линия.
Равноускоренное движение - движение, при котором ускорение постоянно по модулю и направлению.