ಏಕರೂಪದ ಚಲನೆ -ಇದು ಒಂದು ಚಳುವಳಿಯಾಗಿದೆ ಸ್ಥಿರ ವೇಗ, ಅಂದರೆ, ದೇಹದ ವೇಗವು ಪರಿಮಾಣದಲ್ಲಿ ಅಥವಾ ದಿಕ್ಕಿನಲ್ಲಿ ಬದಲಾಗದಿದ್ದಾಗ. , ಮತ್ತು ಯಾವುದೇ ವೇಗವರ್ಧನೆ ಅಥವಾ ನಿಧಾನಗತಿಯು ಸಂಭವಿಸುವುದಿಲ್ಲ.
ನೇರ ರೇಖೆಯ ಚಲನೆ -ಇದು ಸರಳ ರೇಖೆಯಲ್ಲಿ ಚಲನೆ, ಅಂದರೆ, ಪಥ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆ- ಇದು ನೇರ ರೇಖೆ.
ಏಕರೂಪದ ರೇಖೀಯ ಚಲನೆದೇಹವು ಯಾವುದೇ ಸಮಾನ ಮಧ್ಯಂತರಗಳಲ್ಲಿ ಸಮಾನ ಚಲನೆಯನ್ನು ಮಾಡುವ ಒಂದು ಚಲನೆಯಾಗಿದೆ.ಉದಾಹರಣೆಗೆ, ನಾವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರವನ್ನು ಒಂದು-ಸೆಕೆಂಡ್ ಮಧ್ಯಂತರಗಳಾಗಿ ವಿಂಗಡಿಸಿದರೆ, ನಂತರ ಏಕರೂಪದ ಚಲನೆಯೊಂದಿಗೆ ದೇಹವು ಈ ಸಮಯದ ಮಧ್ಯಂತರಗಳಲ್ಲಿ ಒಂದೇ ದೂರವನ್ನು ಚಲಿಸುತ್ತದೆ.
ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ವೇಗವು ಸಮಯವನ್ನು ಅವಲಂಬಿಸಿರುವುದಿಲ್ಲ ಮತ್ತು ಪಥದ ಪ್ರತಿಯೊಂದು ಹಂತದಲ್ಲಿ ದೇಹದ ಚಲನೆಯಂತೆಯೇ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಅಂದರೆ, ಸ್ಥಳಾಂತರ ವೆಕ್ಟರ್ ವೇಗ ವೆಕ್ಟರ್ನೊಂದಿಗೆ ದಿಕ್ಕಿನಲ್ಲಿ ಸೇರಿಕೊಳ್ಳುತ್ತದೆ. ಇದರಲ್ಲಿ ಸರಾಸರಿ ವೇಗಯಾವುದೇ ಅವಧಿಗೆ ತತ್ಕ್ಷಣದ ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ದೂರವು ಸರಳ ರೇಖೆಯಲ್ಲಿ ಸಾಗಿತು ಮಾಡ್ಯುಲಸ್ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆಚಳುವಳಿ. ಏಕರೂಪದ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಪ್ರಯಾಣಿಸಿದ ಮಾರ್ಗವನ್ನು ಕಂಡುಹಿಡಿಯಲು, ನೀವು ಚಲನೆಯ ಸಮಯದಿಂದ ದೇಹದ ವೇಗವನ್ನು ಗುಣಿಸಬೇಕಾಗುತ್ತದೆ:
ನಾವು ಪರಿಚಯಿಸುವ ಚಲನೆಯನ್ನು ವಿವರಿಸಲು ಆಯತಾಕಾರದ ವ್ಯವಸ್ಥೆ XOU ನಿರ್ದೇಶಾಂಕಗಳು. ನಂತರ ದೇಹದ ಸ್ಥಾನವನ್ನು ಅದರ X ಮತ್ತು Y ನಿರ್ದೇಶಾಂಕಗಳಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
x = ±x 0 ± υ x t
y = ±y 0 ± υ y t
ಅಲ್ಲಿ x 0; y 0 - ದೇಹದ ಆರಂಭಿಕ ನಿರ್ದೇಶಾಂಕಗಳು; υ x, υ y - ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲೆ ವೇಗ ವೆಕ್ಟರ್ನ ಪ್ರಕ್ಷೇಪಗಳು
x 0 ಮತ್ತು y 0 ಮೌಲ್ಯಗಳು, ಹಾಗೆಯೇ ಸಮೀಕರಣಗಳ ಬಲಭಾಗದಲ್ಲಿರುವ ಪದಗಳ ಮುಂದೆ ಇರುವ ಚಿಹ್ನೆಗಳು, ಮೂಲದ ಆಯ್ಕೆ ಮತ್ತು OX ಮತ್ತು OU ಅಕ್ಷಗಳ ದಿಕ್ಕನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. OX ಅಕ್ಷದ ಧನಾತ್ಮಕ ದಿಕ್ಕು ಚಲನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ (ವೇಗದ ದಿಕ್ಕಿನೊಂದಿಗೆ) ಹೊಂದಿಕೆಯಾದರೆ, OX ಅಕ್ಷದ ಮೇಲೆ ವೇಗದ ಪ್ರಕ್ಷೇಪಣವು ವೇಗದ ಪ್ರಮಾಣಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ. OX ಅಕ್ಷದ ಧನಾತ್ಮಕ ದಿಕ್ಕು ದೇಹದ ಚಲನೆಯ ದಿಕ್ಕಿಗೆ ವಿರುದ್ಧವಾಗಿದ್ದರೆ, ವೇಗವು ಋಣಾತ್ಮಕವಾಗಿರುತ್ತದೆ.
OX ಅಕ್ಷದ ಮೇಲೆ ಸ್ಥಳಾಂತರದ ಪ್ರಕ್ಷೇಪಣವು ಇದಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
S=υˑt = x-x 0
ಸಮಯದ ವಿರುದ್ಧ ಸ್ಥಳಾಂತರದ ಗ್ರಾಫ್ ಅನ್ನು ಅಂಜೂರ 1.5 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. ವೇಗದ ಪ್ರಕ್ಷೇಪಣವು ಸಮಾನವಾಗಿರುತ್ತದೆ ಎಂದು ಗ್ರಾಫ್ ತೋರಿಸುತ್ತದೆ
ಇಲ್ಲಿ α ಎಂಬುದು ಗ್ರಾಫ್ನ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಇಳಿಜಾರಿನ ಕೋನವಾಗಿದೆ.
ದೊಡ್ಡ ಕೋನ α, ದೇಹವು ವೇಗವಾಗಿ ಚಲಿಸುತ್ತದೆ, ಅಂದರೆ, ಅದರ ವೇಗವು ಹೆಚ್ಚಾಗುತ್ತದೆ (ದೇಹವು ಕಡಿಮೆ ಸಮಯದಲ್ಲಿ ಹೆಚ್ಚು ದೂರ ಚಲಿಸುತ್ತದೆ).
ಸಮಯದ ವಿರುದ್ಧ ನಿರ್ದೇಶಾಂಕದ ಗ್ರಾಫ್ಗೆ ಸ್ಪರ್ಶಕದ ಇಳಿಜಾರಿನ ಕೋನದ ಸ್ಪರ್ಶಕ ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಸಮಯಕ್ಕೆ ನಿರ್ದೇಶಾಂಕದ ಅವಲಂಬನೆಯನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1.6. ಆಕೃತಿಯಿಂದ ಅದು ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ
tgα 1 > tgα 2
ಆದ್ದರಿಂದ, ದೇಹ 1 ರ ವೇಗವು ದೇಹ 2 ರ ವೇಗಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ
(υ 1 > υ 2)
tgα 3 = υ 3 ˂ 0
 ದೇಹವು ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ, ನಿರ್ದೇಶಾಂಕ ಗ್ರಾಫ್ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಾಗಿದೆ, ಅಂದರೆ
ದೇಹವು ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ, ನಿರ್ದೇಶಾಂಕ ಗ್ರಾಫ್ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಾಗಿದೆ, ಅಂದರೆ
ಸಮಯಕ್ಕೆ ನಿರ್ದೇಶಾಂಕಗಳ ನೇರ ಅವಲಂಬನೆಗಳ ಛೇದನದ ಬಿಂದುವನ್ನು ನಿರ್ಮಿಸಲಾಗಿದೆ ವಿವಿಧ ದೇಹಗಳುಅದೇ ಪ್ರಮಾಣದಲ್ಲಿ, ಈ ದೇಹಗಳ ಸಭೆಯ ಹಂತಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ.
![]() ವೇಗದ ಗ್ರಾಫ್ ಏಕರೂಪದ ಚಲನೆಚಿತ್ರ 1.7 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. ವೇಗವು ಸ್ಥಿರವಾಗಿರುವುದರಿಂದ, ವೇಗದ ಗ್ರಾಫ್ ಸಮಯ ಅಕ್ಷದ Ot ಗೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಾಗಿದೆ.
ವೇಗದ ಗ್ರಾಫ್ ಏಕರೂಪದ ಚಲನೆಚಿತ್ರ 1.7 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. ವೇಗವು ಸ್ಥಿರವಾಗಿರುವುದರಿಂದ, ವೇಗದ ಗ್ರಾಫ್ ಸಮಯ ಅಕ್ಷದ Ot ಗೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಾಗಿದೆ.
ವೇಗದ ಪ್ರಕ್ಷೇಪಣವು ಧನಾತ್ಮಕವಾಗಿರಬಹುದು (ವೇಗವನ್ನು x-ಅಕ್ಷದ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಿದರೆ) ಅಥವಾ ಋಣಾತ್ಮಕವಾಗಿರಬಹುದು (ವೇಗವು x-ಅಕ್ಷದ ದಿಕ್ಕಿನ ವಿರುದ್ಧ ನಿರ್ದೇಶಿಸಲ್ಪಟ್ಟಿದ್ದರೆ).
ವೇಗದ ಪ್ರೊಜೆಕ್ಷನ್ ಗ್ರಾಫ್ (Fig. 1.8) ಅಡಿಯಲ್ಲಿರುವ ಪ್ರದೇಶವು ಸ್ಥಳಾಂತರದ ಪ್ರೊಜೆಕ್ಷನ್ಗೆ ಸಂಖ್ಯಾತ್ಮಕವಾಗಿ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಸ್ಥಳಾಂತರದ ವೆಕ್ಟರ್ನ ಪ್ರಮಾಣವು ವೇಗ ವೆಕ್ಟರ್ನ ಉತ್ಪನ್ನಕ್ಕೆ ಮತ್ತು ಸ್ಥಳಾಂತರವನ್ನು ಮಾಡಿದ ಸಮಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಪಾಠದ ಉದ್ದೇಶಗಳು:
ಶೈಕ್ಷಣಿಕ:ಅವಲಂಬನೆ ಗ್ರಾಫ್ಗಳನ್ನು ನಿರ್ಮಿಸುವಲ್ಲಿ ಕೌಶಲ್ಯಗಳನ್ನು ಪರಿಗಣಿಸಿ ಮತ್ತು ಅಭಿವೃದ್ಧಿಪಡಿಸಿ ಚಲನಶಾಸ್ತ್ರದ ಪ್ರಮಾಣಗಳುಏಕರೂಪದ ಮತ್ತು ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯೊಂದಿಗೆ ಸಮಯದಿಂದ; ಈ ಗ್ರಾಫ್ಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಲು ವಿದ್ಯಾರ್ಥಿಗಳಿಗೆ ಕಲಿಸಿ; ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುವ ಮೂಲಕ, ಅಭ್ಯಾಸದಲ್ಲಿ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡ ಜ್ಞಾನವನ್ನು ಕ್ರೋಢೀಕರಿಸಿ;
ಅಭಿವೃದ್ಧಿಪಡಿಸುತ್ತಿದೆ:ನಿರ್ದಿಷ್ಟ ಸಂದರ್ಭಗಳನ್ನು ಗಮನಿಸುವ ಮತ್ತು ವಿಶ್ಲೇಷಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವುದು; ಹೈಲೈಟ್ ಕೆಲವು ಚಿಹ್ನೆಗಳು;
ಶಿಕ್ಷಣ:ಶಿಸ್ತು ಮತ್ತು ನಡವಳಿಕೆಯ ರೂಢಿಗಳನ್ನು ಹುಟ್ಟುಹಾಕುವುದು, ಅಧ್ಯಯನ ಮಾಡುವ ವಿಷಯದ ಬಗ್ಗೆ ಸೃಜನಾತ್ಮಕ ವರ್ತನೆ; ವಿದ್ಯಾರ್ಥಿಗಳ ಚಟುವಟಿಕೆಯನ್ನು ಉತ್ತೇಜಿಸುತ್ತದೆ.
ವಿಧಾನಗಳು:
ಮೌಖಿಕ- ಸಂಭಾಷಣೆ;
ದೃಶ್ಯ- ವೀಡಿಯೊ ಪಾಠ, ಮಂಡಳಿಯಲ್ಲಿ ಟಿಪ್ಪಣಿಗಳು;
ನಿಯಂತ್ರಿಸುತ್ತಿದೆ- ಪರೀಕ್ಷೆ ಅಥವಾ ಮೌಖಿಕ (ಲಿಖಿತ) ಸಮೀಕ್ಷೆ, ಸಮಸ್ಯೆ ಪರಿಹಾರ).
ಸಂಪರ್ಕಗಳು:
ಅಂತರಶಿಸ್ತೀಯ: ಗಣಿತ - ರೇಖೀಯ ಅವಲಂಬನೆ, ರೇಖೀಯ ಕಾರ್ಯದ ಗ್ರಾಫ್; ಚತುರ್ಭುಜ ಕಾರ್ಯಮತ್ತು ಅವಳ ವೇಳಾಪಟ್ಟಿ;
ಒಳ-ವಿಷಯ: ಏಕರೂಪದ ಮತ್ತು ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆ.
ಸರಿಸಿ ಪಾಠ:
1. ಸಾಂಸ್ಥಿಕ ಹಂತ.
ಶುಭ ಅಪರಾಹ್ನ. ನಾವು ಪಾಠವನ್ನು ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು, ನೀವು ಪ್ರತಿಯೊಬ್ಬರೂ ಕೆಲಸದ ಮನಸ್ಥಿತಿಗೆ ಬರಬೇಕೆಂದು ನಾನು ಬಯಸುತ್ತೇನೆ.
2. ಜ್ಞಾನವನ್ನು ನವೀಕರಿಸುವುದು.
3. ಹೊಸ ವಸ್ತುಗಳ ವಿವರಣೆ.
ಯಾಂತ್ರಿಕ ಚಲನೆಯು ಕಾಲಾನಂತರದಲ್ಲಿ ಇತರ ದೇಹಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ದೇಹದ (ಅಥವಾ ದೇಹದ ಭಾಗಗಳು) ಸ್ಥಾನದಲ್ಲಿನ ಬದಲಾವಣೆಯಾಗಿದೆ ಎಂದು ನಿಮಗೆ ಮತ್ತು ನನಗೆ ತಿಳಿದಿದೆ.
ಪ್ರತಿಯಾಗಿ, ಯಾಂತ್ರಿಕ ಚಲನೆಯು ಎರಡು ವಿಧವಾಗಿದೆ - ಸಮವಸ್ತ್ರ, ಇದರಲ್ಲಿ ದೇಹವು ಯಾವುದೇ ಸಮಾನ ಮಧ್ಯಂತರಗಳಲ್ಲಿ ಸಮಾನ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ ಮತ್ತು ಅಸಮವಾಗಿದೆ, ಇದರಲ್ಲಿ ದೇಹವು ಯಾವುದೇ ಸಮಾನ ಮಧ್ಯಂತರದಲ್ಲಿ ವಿಭಿನ್ನ ಚಲನೆಗಳನ್ನು ಮಾಡುತ್ತದೆ.
ಏಕರೂಪ ಮತ್ತು ಅಸಮ ಚಲನೆಗಾಗಿ ನಾವು ಕಲಿತ ಮೂಲ ಸೂತ್ರಗಳನ್ನು ನೆನಪಿಸೋಣ.
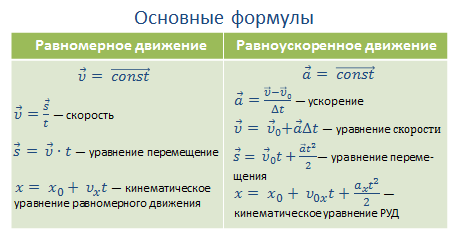
ಚಲನೆಯು ಏಕರೂಪವಾಗಿದ್ದರೆ, ನಂತರ:
1. ದೇಹದ ವೇಗವು ಕಾಲಾನಂತರದಲ್ಲಿ ಬದಲಾಗುವುದಿಲ್ಲ;
2. ದೇಹದ ವೇಗವನ್ನು ಕಂಡುಹಿಡಿಯಲು, ಈ ಅವಧಿಯ ಮೂಲಕ ದೇಹವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ಪ್ರಯಾಣಿಸಿದ ಮಾರ್ಗವನ್ನು ವಿಭಜಿಸುವುದು ಅವಶ್ಯಕ;
3. ಸ್ಥಳಾಂತರ ಸಮೀಕರಣವು ರೂಪವನ್ನು ಹೊಂದಿದೆ:
4. ಮತ್ತು ![]() - ಏಕರೂಪದ ಚಲನೆಯ ಚಲನಶಾಸ್ತ್ರದ ಸಮೀಕರಣ.
- ಏಕರೂಪದ ಚಲನೆಯ ಚಲನಶಾಸ್ತ್ರದ ಸಮೀಕರಣ.
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧನೆಗಾಗಿ:
1. ದೇಹದ ವೇಗವರ್ಧನೆಯು ಕಾಲಾನಂತರದಲ್ಲಿ ಬದಲಾಗುವುದಿಲ್ಲ;
2. ವೇಗವರ್ಧನೆಯು ಪ್ರಮಾಣವಾಗಿದೆ ಅನುಪಾತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆದೇಹದ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಗಳು, ಈ ಬದಲಾವಣೆಯು ಸಂಭವಿಸಿದ ಅವಧಿಗೆ
3. ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯ ವೇಗ ಸಮೀಕರಣವು ರೂಪವನ್ನು ಹೊಂದಿದೆ: ![]()
4. ![]() - ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಗೆ ಸ್ಥಳಾಂತರ ಸಮೀಕರಣ;
- ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಗೆ ಸ್ಥಳಾಂತರ ಸಮೀಕರಣ;
5. ![]() - ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯ ಚಲನಶಾಸ್ತ್ರದ ಸಮೀಕರಣ.
- ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯ ಚಲನಶಾಸ್ತ್ರದ ಸಮೀಕರಣ.
ಹೆಚ್ಚಿನ ಸ್ಪಷ್ಟತೆಗಾಗಿ, ಗ್ರಾಫ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಚಲನೆಯನ್ನು ವಿವರಿಸಬಹುದು.
ಸಮಯಕ್ಕೆ ಅದರ ಚಲನೆಯಿಂದಾಗಿ ದೇಹವು ಹೊಂದಬಹುದಾದ ವೇಗವರ್ಧನೆಯ ಅವಲಂಬನೆಯನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ.
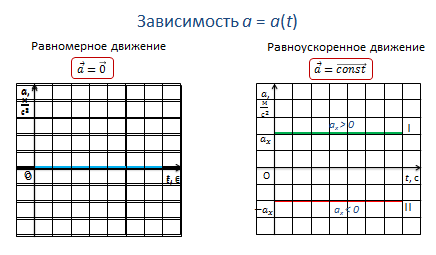
ಸಮತಲ ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ (ಅಬ್ಸಿಸ್ಸಾ ಆಕ್ಸಿಸ್) ನಾವು ಸಮಯ ಎಣಿಕೆಯ ಪ್ರಾರಂಭದಿಂದ ಕಳೆದ ಸಮಯವನ್ನು ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದಲ್ಲಿ ಯೋಜಿಸುತ್ತೇವೆ ಮತ್ತು ಉದ್ದಕ್ಕೂ ಲಂಬ ಅಕ್ಷ(ಆರ್ಡಿನೇಟ್ ಅಕ್ಷಗಳು) - ಸೂಕ್ತವಾದ ಪ್ರಮಾಣದಲ್ಲಿ - ದೇಹದ ವೇಗವರ್ಧನೆಯ ಮೌಲ್ಯಗಳು, ಪರಿಣಾಮವಾಗಿ ಗ್ರಾಫ್ ಸಮಯಕ್ಕೆ ದೇಹದ ವೇಗವರ್ಧನೆಯ ಅವಲಂಬನೆಯನ್ನು ವ್ಯಕ್ತಪಡಿಸುತ್ತದೆ.
ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಗಾಗಿ, ವೇಗವರ್ಧನೆಯ ಗ್ರಾಫ್ ಮತ್ತು ಸಮಯವು ನೇರ ರೇಖೆಯ ರೂಪವನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಇದು ಸಮಯದ ಅಕ್ಷದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ, ಏಕೆಂದರೆ ಏಕರೂಪದ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ವೇಗವರ್ಧನೆಯು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಗಾಗಿ, ವೇಗವರ್ಧಕ ಗ್ರಾಫ್ ಸಹ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯ ರೂಪವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ದೇಹವು ವೇಗವರ್ಧಿತ ದರದಲ್ಲಿ ಚಲಿಸುತ್ತಿದ್ದರೆ ಗ್ರಾಫ್ ಸಮಯದ ಅಕ್ಷದ ಮೇಲೆ ಮತ್ತು ದೇಹವು ನಿಧಾನವಾಗಿ ಚಲಿಸುತ್ತಿದ್ದರೆ ಸಮಯದ ಅಕ್ಷದ ಕೆಳಗೆ ಇದೆ.
ನಾವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದಲ್ಲಿ ಸಮತಲ ಅಕ್ಷದ (ಅಬ್ಸಿಸ್ಸಾ ಅಕ್ಷ) ಮೇಲೆ ಸಮಯವನ್ನು ರೂಪಿಸಿದರೆ ಮತ್ತು ಲಂಬವಾದ ಆರ್ಡಿನೇಟ್ ಅಕ್ಷದ ಮೇಲೆ - ಸೂಕ್ತವಾದ ಪ್ರಮಾಣದಲ್ಲಿ - ದೇಹದ ವೇಗದ ಮೌಲ್ಯಗಳು, ಆಗ ನಾವು ವೇಗದ ಗ್ರಾಫ್ ಅನ್ನು ಪಡೆಯುತ್ತೇವೆ.
ಏಕರೂಪದ ಚಲನೆಗಾಗಿ, ವೇಗದ ಗ್ರಾಫ್ ಸಮಯ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಂತೆ ಕಾಣುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ದೇಹವು ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ಚಲಿಸಿದರೆ ವೇಗದ ಗ್ರಾಫ್ ಸಮಯ ಅಕ್ಷದ ಮೇಲೆ ಇದೆ X, ಮತ್ತು ದೇಹವು ಅಕ್ಷದ ವಿರುದ್ಧ ಚಲಿಸಿದರೆ ಸಮಯದ ಅಕ್ಷದ ಅಡಿಯಲ್ಲಿ X.
ಅಂತಹ ಗ್ರಾಫ್ಗಳು ಕಾಲಾನಂತರದಲ್ಲಿ ವೇಗವು ಹೇಗೆ ಬದಲಾಗುತ್ತದೆ ಎಂಬುದನ್ನು ತೋರಿಸುತ್ತದೆ, ಅಂದರೆ ವೇಗವು ಸಮಯವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ರೆಕ್ಟಿಲಿನಿಯರ್ ಏಕರೂಪದ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಈ "ಅವಲಂಬನೆ" ವೇಗವು ಕಾಲಾನಂತರದಲ್ಲಿ ಬದಲಾಗುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ವೇಗದ ಗ್ರಾಫ್ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾದ ನೇರ ರೇಖೆಯಾಗಿದೆ.
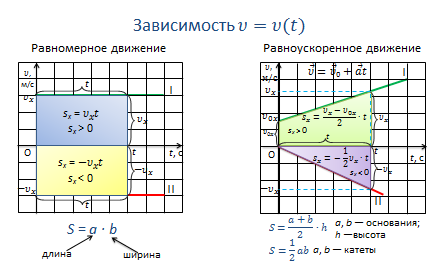
ವೇಗದ ಗ್ರಾಫ್ನಿಂದಲೂ ನೀವು ಕಂಡುಹಿಡಿಯಬಹುದು ಸಂಪೂರ್ಣ ಮೌಲ್ಯಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ದೇಹದ ಚಲನೆಗಳು. ಇದು ಮಬ್ಬಾದ ಆಯತದ ಪ್ರದೇಶಕ್ಕೆ ಸಂಖ್ಯಾತ್ಮಕವಾಗಿ ಸಮನಾಗಿರುತ್ತದೆ: ದೇಹವು ಸಕಾರಾತ್ಮಕ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತಿದ್ದರೆ ಮೇಲಿನದು ಮತ್ತು ದೇಹವು ನಕಾರಾತ್ಮಕ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತಿದ್ದರೆ ಕೆಳಭಾಗ.
ವಾಸ್ತವವಾಗಿ, ಒಂದು ಆಯತದ ಪ್ರದೇಶವು ಅದರ ಬದಿಗಳ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ: S=ab, ಅಲ್ಲಿ ಎಮತ್ತು ಬಿಆಯತದ ಬದಿಗಳು.
ಆದರೆ ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದಲ್ಲಿ ಒಂದು ಬದಿಯು ಸಮಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಮತ್ತು ಇನ್ನೊಂದು ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಮತ್ತು ಅವರ ಉತ್ಪನ್ನವು ದೇಹದ ಸ್ಥಳಾಂತರದ ಸಂಪೂರ್ಣ ಮೌಲ್ಯಕ್ಕೆ ನಿಖರವಾಗಿ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವೇಗ ವೆಕ್ಟರ್ನ ಪ್ರೊಜೆಕ್ಷನ್ ಧನಾತ್ಮಕವಾಗಿದ್ದರೆ ಸ್ಥಳಾಂತರವು ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ ಮತ್ತು ವೇಗ ವೆಕ್ಟರ್ನ ಪ್ರೊಜೆಕ್ಷನ್ ಋಣಾತ್ಮಕವಾಗಿದ್ದರೆ ಋಣಾತ್ಮಕವಾಗಿರುತ್ತದೆ.
ಉದ್ದಕ್ಕೂ ಸಂಭವಿಸುವ ದೇಹದ ಏಕರೂಪದ ವೇಗವರ್ಧಿತ ಚಲನೆಯೊಂದಿಗೆ ಸಮನ್ವಯ ಅಕ್ಷ X, ವೇಗವು ಕಾಲಾನಂತರದಲ್ಲಿ ಸ್ಥಿರವಾಗಿರುವುದಿಲ್ಲ, ಆದರೆ ಸೂತ್ರದ ಪ್ರಕಾರ ಕಾಲಾನಂತರದಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ v = v 0+ ನಲ್ಲಿ, ಅಂದರೆ ವೇಗ ರೇಖೀಯ ಕಾರ್ಯ, ಮತ್ತು ಆದ್ದರಿಂದ ವೇಗದ ಗ್ರಾಫ್ಗಳು ನೇರ ರೇಖೆಯಂತೆ ಕಾಣುತ್ತವೆ, ಸಮಯ ಅಕ್ಷಕ್ಕೆ ಒಲವು ತೋರುತ್ತವೆ. ಇದಲ್ಲದೆ, ಹೆಚ್ಚಿನ ಇಳಿಜಾರಿನ ಕೋನವು ದೇಹದ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ. ನಮ್ಮ ಗ್ರಾಫ್ನಲ್ಲಿ, ಲೈನ್ 1 ಧನಾತ್ಮಕ ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಚಲನೆಗೆ ಅನುರೂಪವಾಗಿದೆ (ವೇಗ ಹೆಚ್ಚಾಗುತ್ತದೆ) ಮತ್ತು ಕೆಲವು ಆರಂಭಿಕ ವೇಗ, ಲೈನ್ 2 ಚಲನೆಗೆ ಅನುರೂಪವಾಗಿದೆ ಋಣಾತ್ಮಕ ವೇಗವರ್ಧನೆ(ವೇಗ ಕಡಿಮೆಯಾಗುತ್ತದೆ) ಮತ್ತು ಆರಂಭಿಕ ವೇಗ ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ವೇಗದ ಗ್ರಾಫ್ ಅನ್ನು ಬಳಸಿ, ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ದೇಹದ ಚಲನೆಯ ಸಂಪೂರ್ಣ ಮೌಲ್ಯವನ್ನು ಸಹ ನೀವು ಕಂಡುಹಿಡಿಯಬಹುದು. ಇದು ಸಂಖ್ಯಾತ್ಮಕವಾಗಿ ದೇಹ 1 ಗೆ ಮಬ್ಬಾದ ಟ್ರೆಪೆಜಾಯಿಡ್ ಪ್ರದೇಶಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ ಮತ್ತು ಬಲ ತ್ರಿಕೋನ- ವಿರುದ್ಧ ಸಂದರ್ಭದಲ್ಲಿ. ವಾಸ್ತವವಾಗಿ, ಉದಾಹರಣೆಗೆ, ಟ್ರೆಪೆಜಾಯಿಡ್ನ ಪ್ರದೇಶವು ಅದರ ಬೇಸ್ಗಳ ಅರ್ಧ ಮೊತ್ತ ಮತ್ತು ಅದರ ಎತ್ತರದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ನಮ್ಮ ಸಂದರ್ಭದಲ್ಲಿ, ಒಂದು ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದಲ್ಲಿ, ಟ್ರೆಪೆಜಾಯಿಡ್ನ ಎತ್ತರವು ಸಮಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಬೇಸ್ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೊದಲ ದೇಹಕ್ಕೆ ಸ್ಥಳಾಂತರದ ಪ್ರೊಜೆಕ್ಷನ್ ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ.
ಎರಡನೇ ದೇಹಕ್ಕೆ, ಬಲ ತ್ರಿಕೋನ - ಅದರ ಕಾಲುಗಳ ಅರ್ಧದಷ್ಟು ಉತ್ಪನ್ನ. ನಮ್ಮ ಸಂದರ್ಭದಲ್ಲಿ, ಕಾಲುಗಳು ಸಮಯ ಮತ್ತು ದೇಹದ ಅಂತಿಮ ವೇಗ.
ಸ್ಥಳಾಂತರದ ಪ್ರೊಜೆಕ್ಷನ್ ಋಣಾತ್ಮಕವಾಗಿದೆ.
ಸಮಯಕ್ಕೆ ಪ್ರಯಾಣಿಸಿದ ದೂರದ ಅವಲಂಬನೆಯನ್ನು ಈಗ ಪರಿಗಣಿಸಿ.
ಹಿಂದಿನ ಪ್ರಕರಣಗಳಂತೆ, ಅಬ್ಸಿಸ್ಸಾ ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ನಾವು ಚಲನೆ ಪ್ರಾರಂಭವಾದ ಕ್ಷಣದಿಂದ ಸಮಯವನ್ನು ರೂಪಿಸುತ್ತೇವೆ ಮತ್ತು ಆರ್ಡಿನೇಟ್ ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ನಾವು ಮಾರ್ಗವನ್ನು ರೂಪಿಸುತ್ತೇವೆ.
ಏಕರೂಪದ ಚಲನೆಗೆ, ಮಾರ್ಗದ ವಿರುದ್ಧ ಸಮಯದ ಗ್ರಾಫ್ ಸರಳ ರೇಖೆಯಾಗಿದೆ, ಏಕೆಂದರೆ ಅವಲಂಬನೆಯು ರೇಖೀಯವಾಗಿದೆ.
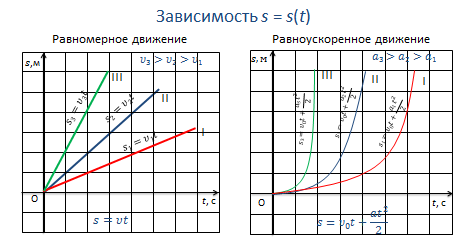
ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಗ್ರಾಫ್ನ ಇಳಿಜಾರು ವೇಗದ ಮಾಡ್ಯೂಲ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ: ಹೆಚ್ಚಿನ ವೇಗ, ಹೆಚ್ಚಿನ ಇಳಿಜಾರಿನ ಕೋನ ಮತ್ತು ದೇಹದ ಹೆಚ್ಚಿನ ವೇಗ.
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯೊಂದಿಗೆ, ಗ್ರಾಫ್ ಪ್ಯಾರಾಬೋಲಾದ ಶಾಖೆಯಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಅವಲಂಬನೆ, ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಚತುರ್ಭುಜವಾಗಿರುತ್ತದೆ. ಮತ್ತು ದೇಹವು ಚಲಿಸುವ ಹೆಚ್ಚಿನ ವೇಗವರ್ಧನೆಯು, ಆರ್ಡಿನೇಟ್ ಅಕ್ಷದ ವಿರುದ್ಧ ಬಲವಾದ ಗ್ರಾಫ್ ಅನ್ನು ಒತ್ತಲಾಗುತ್ತದೆ.
ಈಗ ಸಮಯಕ್ಕೆ ಚಲನೆಯ ಅವಲಂಬನೆಯನ್ನು ಪರಿಗಣಿಸಲು ಹೋಗೋಣ.
ಏಕರೂಪದ ಚಲನೆಯನ್ನು ಪರಿಗಣಿಸೋಣ.
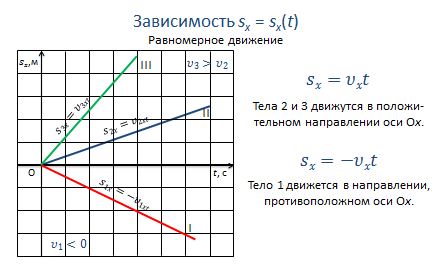
ಏಕೆಂದರೆ ಏಕರೂಪದ ಚಲನೆಯೊಂದಿಗೆ, ಸ್ಥಳಾಂತರವು ಸಮಯದ ಮೇಲೆ ರೇಖಾತ್ಮಕವಾಗಿ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ ( sx = υ Xಟಿ), ನಂತರ ಗ್ರಾಫ್ ನೇರ ರೇಖೆಯಾಗಿರುತ್ತದೆ. ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಗ್ರಾಫ್ನ ಇಳಿಜಾರಿನ ದಿಕ್ಕು ಮತ್ತು ಕೋನವು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷದ ಮೇಲೆ ವೇಗ ವೆಕ್ಟರ್ನ ಪ್ರಕ್ಷೇಪಣವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಆದ್ದರಿಂದ, ನಮ್ಮ ಸಂದರ್ಭದಲ್ಲಿ, ದೇಹಗಳು 2 ಮತ್ತು 3 ಅಕ್ಷದ ಧನಾತ್ಮಕ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತವೆ X, ಮೂರನೇ ದೇಹದ ವೇಗವು ಎರಡನೆಯ ವೇಗಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ.
ಮತ್ತು ದೇಹ 1 ದಿಕ್ಕಿನಲ್ಲಿದೆ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿಅಕ್ಷಗಳು X, ಆದ್ದರಿಂದ ಗ್ರಾಫ್ ಸಮಯದ ಅಕ್ಷದ ಅಡಿಯಲ್ಲಿ ಇದೆ.
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಗಾಗಿ, ಸ್ಥಳಾಂತರದ ಗ್ರಾಫ್ ಒಂದು ಪ್ಯಾರಾಬೋಲಾ ಆಗಿದೆ, ಅದರ ಶೃಂಗದ ಸ್ಥಾನವು ದಿಕ್ಕುಗಳ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ ಆರಂಭಿಕ ವೇಗಮತ್ತು ವೇಗವರ್ಧನೆ.
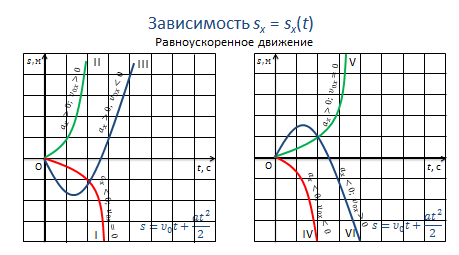
1 ನೇ ದೇಹಕ್ಕೆ, ವೇಗವರ್ಧನೆಯು ಶೂನ್ಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ, ಆರಂಭಿಕ ವೇಗವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
2 ನೇ ದೇಹಕ್ಕೆ, ದೇಹದ ವೇಗವರ್ಧನೆ ಮತ್ತು ಆರಂಭಿಕ ವೇಗವು ಶೂನ್ಯಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ.
3 ನೇ ದೇಹಕ್ಕೆ, ವೇಗವರ್ಧನೆಯು ಶೂನ್ಯಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ, ಆರಂಭಿಕ ವೇಗವು ಶೂನ್ಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ.
4 ನೇ ದೇಹವು ಆರಂಭಿಕ ವೇಗ ಮತ್ತು ಶೂನ್ಯಕ್ಕಿಂತ ಕಡಿಮೆ ವೇಗವನ್ನು ಹೊಂದಿದೆ.
5 ನೇ ದೇಹಕ್ಕೆ, ವೇಗವರ್ಧನೆಯು ಶೂನ್ಯಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ ಮತ್ತು ಆರಂಭಿಕ ವೇಗವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
ಮತ್ತು ಅಂತಿಮವಾಗಿ, 6 ನೇ ದೇಹವು ನಿಧಾನವಾಗಿ ಚಲಿಸುತ್ತದೆ, ಆದರೆ ಕೆಲವು ಆರಂಭಿಕ ವೇಗದೊಂದಿಗೆ.
ಮತ್ತು ನಾವು ಪರಿಗಣಿಸುವ ಕೊನೆಯ ವಿಷಯವೆಂದರೆ ಸಮಯಕ್ಕೆ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆ.
ಸಮಯದ ಆರಂಭದಿಂದ ಕಳೆದ ಸಮಯವನ್ನು ಸಮತಲ ಅಕ್ಷದ (ಅಬ್ಸಿಸ್ಸಾ ಆಕ್ಸಿಸ್) ಉದ್ದಕ್ಕೂ ರೂಪಿಸಿದರೆ ಮತ್ತು ದೇಹದ ನಿರ್ದೇಶಾಂಕ ಮೌಲ್ಯಗಳನ್ನು ಲಂಬ ಅಕ್ಷದ (ಆರ್ಡಿನೇಟ್ ಆಕ್ಸಿಸ್) ಜೊತೆಗೆ ಸೂಕ್ತ ಪ್ರಮಾಣದಲ್ಲಿ ರೂಪಿಸಿದರೆ, ಫಲಿತಾಂಶದ ಗ್ರಾಫ್ ಸಮಯಕ್ಕೆ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಯನ್ನು ವ್ಯಕ್ತಪಡಿಸಿ (ಇದನ್ನು ಚಲನೆಯ ವೇಳಾಪಟ್ಟಿ ಎಂದೂ ಕರೆಯಲಾಗುತ್ತದೆ).
ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಗಾಗಿ, ಚಲನೆಯ ಗ್ರಾಫ್, ಸ್ಥಳಾಂತರದ ಸಂದರ್ಭದಲ್ಲಿ, ಒಂದು ಪ್ಯಾರಾಬೋಲಾ ಆಗಿದೆ, ಇದರ ಶೃಂಗದ ಸ್ಥಾನವು ಆರಂಭಿಕ ವೇಗ ಮತ್ತು ವೇಗವರ್ಧನೆಯ ದಿಕ್ಕುಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಏಕರೂಪದ ಚಲನೆಯ ಗ್ರಾಫ್ ಸರಳ ರೇಖೆಯಾಗಿದೆ. ಇದರರ್ಥ ನಿರ್ದೇಶಾಂಕವು ಸಮಯದ ಮೇಲೆ ರೇಖಾತ್ಮಕವಾಗಿ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ.
ರೆಕ್ಟಿಲಿನಿಯರ್ ದೇಹದ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಚಲನೆಯ ಗ್ರಾಫ್ಗಳು ನೀಡುತ್ತವೆ ಸಂಪೂರ್ಣ ಪರಿಹಾರಯಂತ್ರಶಾಸ್ತ್ರದ ಸಮಸ್ಯೆಗಳು, ಏಕೆಂದರೆ ಅವು ಹಿಂದಿನ ಸಮಯದ ಕ್ಷಣಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ಯಾವುದೇ ಸಮಯದಲ್ಲಿ ದೇಹದ ಸ್ಥಾನವನ್ನು ಕಂಡುಹಿಡಿಯಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಆರಂಭಿಕ ಕ್ಷಣ(ಕೌಂಟ್ಡೌನ್ ಪ್ರಾರಂಭವಾಗುವ ಮೊದಲು ದೇಹವು ಅದೇ ವೇಗದಲ್ಲಿ ಚಲಿಸುತ್ತಿದೆ ಎಂದು ಊಹಿಸಲಾಗಿದೆ).
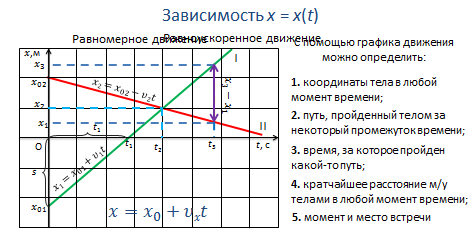
ಚಲನೆಯ ವೇಳಾಪಟ್ಟಿಯನ್ನು ಬಳಸಿಕೊಂಡು ನೀವು ನಿರ್ಧರಿಸಬಹುದು:
1. ಯಾವುದೇ ಸಮಯದಲ್ಲಿ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳು;
2. ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ದೇಹವು ಪ್ರಯಾಣಿಸುವ ಮಾರ್ಗ;
3. ಕೆಲವು ಮಾರ್ಗಗಳು ಪ್ರಯಾಣಿಸಿದ ಸಮಯ;
4. ಯಾವುದೇ ಸಮಯದಲ್ಲಿ ದೇಹಗಳ ನಡುವಿನ ಕಡಿಮೆ ಅಂತರ;
5. ಸಭೆಯ ಕ್ಷಣ ಮತ್ತು ಸ್ಥಳ, ಇತ್ಯಾದಿ.
ಸಮಯಕ್ಕೆ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ಗಳನ್ನು ನೋಡುವ ಮೂಲಕ, ಚಲನೆಯ ವೇಗವನ್ನು ನಿರ್ಣಯಿಸಬಹುದು. ಕಡಿದಾದ ಗ್ರಾಫ್, ಅಂದರೆ, ಅದರ ಮತ್ತು ಸಮಯದ ಅಕ್ಷದ ನಡುವಿನ ಕೋನವು ಹೆಚ್ಚಿನ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ (ಈ ಕೋನವು ಹೆಚ್ಚಾಗುತ್ತದೆ, ಅದೇ ಸಮಯದಲ್ಲಿ ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿನ ಬದಲಾವಣೆಯು ಹೆಚ್ಚಾಗುತ್ತದೆ).
ಸಮಯಕ್ಕೆ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ ಅನ್ನು ದೇಹದ ಚಲನೆಯ ಪಥದೊಂದಿಗೆ ಗೊಂದಲಗೊಳಿಸಬಾರದು ಎಂದು ನೆನಪಿನಲ್ಲಿಡಬೇಕು - ನೇರ ರೇಖೆ, ಅದರ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹವು ಭೇಟಿ ನೀಡಿದ ಎಲ್ಲಾ ಹಂತಗಳಲ್ಲಿ.
4. ಹೊಸ ವಸ್ತುಗಳ ಸಾಮಾನ್ಯೀಕರಣ ಮತ್ತು ಬಲವರ್ಧನೆಯ ಹಂತ
ಮತ್ತು ಆದ್ದರಿಂದ, ನಾವು ಮುಖ್ಯ ತೀರ್ಮಾನವನ್ನು ತೆಗೆದುಕೊಳ್ಳೋಣ.
ಯಾಂತ್ರಿಕ ಚಲನೆಹೆಚ್ಚಿನ ಸ್ಪಷ್ಟತೆಗಾಗಿ, ನೀವು ಗ್ರಾಫ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಅದನ್ನು ವಿವರಿಸಬಹುದು:
1) ಸಮಯಕ್ಕೆ ವೇಗದ ಅವಲಂಬನೆ;
2) ಸಮಯಕ್ಕೆ ವೇಗವರ್ಧನೆಯ ಅವಲಂಬನೆ;
3) ಸಮಯಕ್ಕೆ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆ;
4) ಮತ್ತು ಈ ಚಲನೆ ಸಂಭವಿಸಿದ ಸಮಯದ ಮೇಲೆ ದೇಹದ ಚಲನೆಯ ಅವಲಂಬನೆ.
5. ಪ್ರತಿಬಿಂಬ
ಇಂದಿನ ಪಾಠದ ಕುರಿತು ನಿಮ್ಮ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಕೇಳಲು ನಾನು ಬಯಸುತ್ತೇನೆ: ನೀವು ಏನು ಇಷ್ಟಪಟ್ಟಿದ್ದೀರಿ, ಏನು ಇಷ್ಟಪಡುವುದಿಲ್ಲ, ನೀವು ಇನ್ನೇನು ಕಲಿಯಲು ಬಯಸುತ್ತೀರಿ.
6. ಮನೆಕೆಲಸ.
ಮೊದಲಿಗೆ, ಕೊನೆಯ ಪಾಠದಲ್ಲಿ ನಾವು ಕಲಿತ ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ನಿಯಮಗಳನ್ನು ನೋಡೋಣ:
ನೀವು ಈ ಅಭಿವ್ಯಕ್ತಿಗಳನ್ನು ಎಚ್ಚರಿಕೆಯಿಂದ ಪರಿಶೀಲಿಸಿದರೆ, ಎರಡೂ ಅವಲಂಬನೆಗಳನ್ನು ನೀವು ನೋಡಬಹುದು ರೇಖೀಯ.ನಿಮ್ಮ ಬೀಜಗಣಿತದ ಕೋರ್ಸ್ನಿಂದ ಯಾವುದೇ ರೇಖೀಯ ಸಂಬಂಧದ ಗ್ರಾಫ್ ಸರಳ ರೇಖೆ ಎಂದು ನೀವು ತಿಳಿದಿರಬೇಕು. ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ವೇಗವು ಬದಲಾಗುವುದಿಲ್ಲವಾದ್ದರಿಂದ, ಈ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ ಯಾವಾಗಲೂ ಸಮಯದ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿ ನೇರ ರೇಖೆಯಾಗಿರುತ್ತದೆ.
ಈ ಅವಲಂಬನೆಗಳನ್ನು ನಿರ್ಮಿಸೋಣ (ಚಿತ್ರ 1):
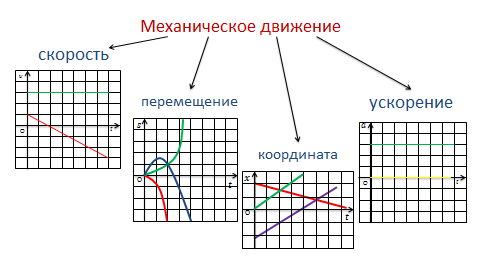
ಅಕ್ಕಿ. 1. ವಿವಿಧ ವೇಗಗಳಲ್ಲಿ ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಗ್ರಾಫ್ಗಳು
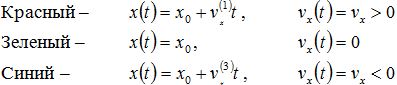
ಎಡ ಗ್ರಾಫ್ ಸಮಯಕ್ಕೆ ಮೂರು ವಿಭಿನ್ನ ಚಲಿಸುವ ಕಾಯಗಳ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಯನ್ನು ತೋರಿಸುತ್ತದೆ. ದೇಹದ ವೇಗವನ್ನು ನಿರ್ದೇಶಾಂಕದ ಅಕ್ಷದಂತೆಯೇ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಿದಾಗ ಕೆಂಪು ಗ್ರಾಫ್ ಪ್ರಕರಣಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಹಸಿರು ಗ್ರಾಫ್ ವಿಶ್ರಾಂತಿಯಲ್ಲಿರುವ ದೇಹದ ಪ್ರಕರಣಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ನೀಲಿ - ವೇಗವನ್ನು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ ನಿರ್ದೇಶಿಸಿದಾಗ. ಪ್ರತಿ ಮೂರು ಗ್ರಾಫ್ಗಳು ಅಕ್ಷವನ್ನು ಛೇದಿಸುವ ಬಿಂದುವು ದೇಹದ ಆರಂಭಿಕ ನಿರ್ದೇಶಾಂಕವಾಗಿದೆ.
ಸರಿಯಾದ ಗ್ರಾಫ್ ಸಮಯಕ್ಕೆ ದೇಹದ ವೇಗಗಳ ಅವಲಂಬನೆಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹಗಳ ವೇಗವು ಬದಲಾಗುವುದಿಲ್ಲವಾದ್ದರಿಂದ, ಗ್ರಾಫ್ಗಳು ನೇರವಾಗಿರುತ್ತವೆ, ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿಸಮಯ. ಕೆಂಪು ಗ್ರಾಫ್ ಸಕಾರಾತ್ಮಕ ವೇಗಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ (ವೇಗವನ್ನು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷದ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ), ಹಸಿರು ಗ್ರಾಫ್ ವಿಶ್ರಾಂತಿಯಲ್ಲಿರುವ ದೇಹಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ (ವೇಗವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ ಮತ್ತು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ), ಮತ್ತು ನೀಲಿ ಗ್ರಾಫ್ ಋಣಾತ್ಮಕ ವೇಗಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ (ವೇಗವು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ವಿರುದ್ಧವಾಗಿದೆ).
ಹೀಗಾಗಿ, ನಾವು ಗ್ರಾಫ್ಗಳಿಂದ ಚಲನೆಯ ನಿಯಮಗಳನ್ನು ಮರುಸ್ಥಾಪಿಸಬಹುದು:
ಬಗ್ಗೆ ಮಾತನಾಡೋಣ ಆರಂಭಿಕ ನಿರ್ದೇಶಾಂಕ. ಈ ಮೌಲ್ಯವನ್ನು ಯಾವಾಗಲೂ ನಿರ್ದೇಶಾಂಕದ ಅಕ್ಷದೊಂದಿಗೆ ಸಮಯಕ್ಕೆ ನಿರ್ದೇಶಾಂಕದ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ನ ಛೇದನದ ಬಿಂದುವಾಗಿ ನಿರ್ಧರಿಸಬಹುದು (ಚಿತ್ರ 2).
ಅಕ್ಕಿ. 2. ವಿಭಿನ್ನ ಆರಂಭಿಕ ಸ್ಥಾನಗಳೊಂದಿಗೆ ದೇಹಗಳ ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಗ್ರಾಫ್ಗಳು
ಕೆಂಪು ವಕ್ರರೇಖೆಗೆ ಅನುಗುಣವಾದ ದೇಹದ ಆರಂಭಿಕ ಸ್ಥಾನವು ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ, ಹಸಿರು ವಕ್ರರೇಖೆಯು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ ಮತ್ತು ನೀಲಿ ವಕ್ರರೇಖೆಯು ಋಣಾತ್ಮಕವಾಗಿರುತ್ತದೆ ಎಂದು ಗ್ರಾಫ್ಗಳಿಂದ ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ.
ಏಕರೂಪದ ರೇಖೀಯ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ವೇಗವನ್ನು ಗ್ರಾಫ್ನಿಂದ ಹೇಗೆ ಪಡೆಯಬಹುದು ಎಂಬುದನ್ನು ಈಗ ನಾವು ಚರ್ಚಿಸೋಣ. ನಿಮ್ಮ ಬೀಜಗಣಿತದ ಕೋರ್ಸ್ನಿಂದ ರೇಖೀಯ ಸಂಬಂಧವನ್ನು ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ನೀಡಲಾಗಿದೆ ಎಂದು ನೀವು ತಿಳಿದಿರಬೇಕು
![]()
ಗುಣಾಂಕ ಎಲ್ಲಿದೆ ಸ್ಪರ್ಶಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆಗ್ರಾಫ್ನಲ್ಲಿ ನೇರ ರೇಖೆಯ ಇಳಿಜಾರು. ಈ ಅವಲಂಬನೆಯು ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಚಲನೆಯ ನಿಯಮವನ್ನು ಹೋಲುತ್ತದೆ. ಹೀಗಾಗಿ, ವೇಗವು ಸಮಯದ ವಿರುದ್ಧ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಗ್ರಾಫ್ನ ಇಳಿಜಾರಿನ ಸ್ಪರ್ಶವಾಗಿದೆ (ಚಿತ್ರ 3).
ಅಕ್ಕಿ. 3. ಸಮಯ ಮತ್ತು ಏಕರೂಪದ ರೆಕ್ಟಿಲಿನಿಯರ್ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ವೇಗದ ವಿರುದ್ಧ ನಿರ್ದೇಶಾಂಕಗಳ ಗ್ರಾಫ್ನ ಇಳಿಜಾರಿನ ಕೋನದ ಸ್ಪರ್ಶಕ ನಡುವಿನ ಸಂಬಂಧ
ಅಕ್ಕಿ. 4. ದೇಹವು ಪ್ರಯಾಣಿಸುವ ದೂರ ಮತ್ತು ದೇಹದ ವೇಗ ಮತ್ತು ಸಮಯದ ಗ್ರಾಫ್ನ ಅಡಿಯಲ್ಲಿರುವ ಪ್ರದೇಶದ ನಡುವಿನ ಸಂಬಂಧ
ದೇಹದ ವೇಗ ಮತ್ತು ಸಮಯದ ಗ್ರಾಫ್ ಅನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದು, ಯಾವುದೇ ಅವಧಿಯಲ್ಲಿ ಪ್ರಯಾಣಿಸುವ ದೂರವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸುವುದು ಎಂಬುದರ ಕುರಿತು ಮಾತನಾಡಲು ಇದು ಉಳಿದಿದೆ. ಅದು ದಾರಿ ಎಂದು ತಿರುಗುತ್ತದೆ ಪ್ರದೇಶಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆಸಮಯದ ಅಕ್ಷ, ನೇರ ರೇಖೆಗಳು ಮತ್ತು , ಮತ್ತು ಸಮಯ ಮತ್ತು ವೇಗದ ಗ್ರಾಫ್ (ಚಿತ್ರ 4) ನಿಂದ ಸೀಮಿತವಾದ ಅಂಕಿ.
ಆದ್ದರಿಂದ, ಈ ಪಾಠದಲ್ಲಿ, ದೇಹಗಳ ಚಲನೆಯ ನಿಯಮಗಳು ಏಕರೂಪವಾಗಿ ಮತ್ತು ಆಯತಾಕಾರದ ಚಲನೆಯನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದು, ಸಮಯಕ್ಕೆ ದೇಹದ ವೇಗ ಮತ್ತು ಸಮಯಕ್ಕೆ ದೇಹದ ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ಗಳನ್ನು ಹೇಗೆ ಸೆಳೆಯುವುದು ಎಂದು ನಾವು ಕಲಿತಿದ್ದೇವೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ನಿರ್ದೇಶಾಂಕಗಳ ಅವಲಂಬನೆಗಳನ್ನು ಮತ್ತು ಗ್ರಾಫ್ಗಳಿಂದ ಸಮಯಕ್ಕೆ ವೇಗವನ್ನು ನಿರ್ಧರಿಸಲು ನಾವು ಕಲಿತಿದ್ದೇವೆ, ಆರಂಭಿಕ ಸ್ಥಾನ, ದೇಹದ ವೇಗ ಮತ್ತು ದೇಹವು ಪ್ರಯಾಣಿಸುವ ಮಾರ್ಗವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ.
ಗ್ರಂಥಸೂಚಿ
- ಜಿ.ಯಾ.ಮೈಕಿಶೇವ್, ಬಿ.ಬಿ.ಬುಖೋವ್ಟ್ಸೆವ್, ಎನ್.ಎನ್.ಸೊಟ್ಸ್ಕಿ. ಭೌತಶಾಸ್ತ್ರ 10. - ಎಂ.: ಶಿಕ್ಷಣ, 2008.
- A. P. ರಿಮ್ಕೆವಿಚ್. ಭೌತಶಾಸ್ತ್ರ. ಸಮಸ್ಯೆ ಪುಸ್ತಕ 10-11. - ಎಂ.: ಬಸ್ಟರ್ಡ್, 2006.
- O. ಸವ್ಚೆಂಕೊ. ಭೌತಶಾಸ್ತ್ರದ ಸಮಸ್ಯೆಗಳು. - ಎಂ.: ನೌಕಾ, 1988.
- A. V. ಪೆರಿಶ್ಕಿನ್, V. V. ಕ್ರೌಕ್ಲಿಸ್. ಭೌತಶಾಸ್ತ್ರ ಕೋರ್ಸ್. T. 1. - M.: ರಾಜ್ಯ. ಶಿಕ್ಷಕ ಸಂ. ನಿಮಿಷ RSFSR ನ ಶಿಕ್ಷಣ, 1957.
- ಎಲ್ಲರಿಗೂ ಭೌತಶಾಸ್ತ್ರ ().
- ವಿಕಿಪೀಡಿಯಾ ().
ಮನೆಕೆಲಸ
- ಈ ಪಾಠದ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಿದ ನಂತರ, ನೀವು ರಾಜ್ಯ ಪರೀಕ್ಷೆಯ 1 ಪ್ರಶ್ನೆಗಳಿಗೆ ಮತ್ತು ಏಕೀಕೃತ ರಾಜ್ಯ ಪರೀಕ್ಷೆಯ A1, A2 ಪ್ರಶ್ನೆಗಳಿಗೆ ತಯಾರಾಗಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
- ಸಮಸ್ಯೆಗಳು 21, 22, 24, 27 ಶನಿ. ಸಮಸ್ಯೆಗಳು A. P. ರಿಮ್ಕೆವಿಚ್ ಸಂ. 10 ()
- ಪ್ಯಾರಾಚೂಟಿಸ್ಟ್ 18 ಕಿಮೀ / ಗಂ ವೇಗದಲ್ಲಿ ಇಳಿಯುತ್ತಾನೆ. 1000 ಮೀಟರ್ ಎತ್ತರದಲ್ಲಿ, ಟೇಬಲ್ ಟೆನ್ನಿಸ್ ಬಾಲ್ ಅವನ ಜೇಬಿನಿಂದ ಬೀಳುತ್ತದೆ ಮತ್ತು 54 ಕಿಮೀ / ಗಂ ವೇಗದಲ್ಲಿ ಏಕರೂಪವಾಗಿ ಬೀಳುತ್ತದೆ. ಯಾವುದನ್ನು ಚಿತ್ರಾತ್ಮಕವಾಗಿ ನಿರ್ಧರಿಸಿ ಸಮಯ ಹಾದುಹೋಗುತ್ತದೆಚೆಂಡಿನ ಲ್ಯಾಂಡಿಂಗ್ ಮತ್ತು ಪ್ಯಾರಾಚೂಟಿಸ್ಟ್ ನಡುವೆ.
ಕೆಳಗಿನ ಪ್ರಶ್ನೆಗಳನ್ನು ಮತ್ತು ಅವುಗಳ ಉತ್ತರಗಳನ್ನು ಪರಿಗಣಿಸಿ:
- ಪ್ರಶ್ನೆ:ನೀವು ಪ್ರೋಟ್ರಾಕ್ಟರ್ನೊಂದಿಗೆ ಗ್ರಾಫ್ನ ಇಳಿಜಾರಿನ ಕೋನವನ್ನು ಅಳತೆ ಮಾಡಿದರೆ ಮತ್ತು ಅದರ ಸ್ಪರ್ಶಕವನ್ನು ಲೆಕ್ಕ ಹಾಕಿದರೆ, ಇದು ದೇಹದ ವೇಗವಾಗಿರುತ್ತದೆ?
- ಉತ್ತರ:ಇಲ್ಲ! ಸಮಯ ಮತ್ತು ಸಮನ್ವಯ ಅಕ್ಷಗಳು ಅಳೆಯಲಾಗದವು ಮತ್ತು ವಿಭಿನ್ನ ಆಯಾಮಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ, ಆದರೆ ಕೋನದ ಸ್ಪರ್ಶಕ, ಕಾಲುಗಳ ಅನುಪಾತವಾಗಿ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ, ವೇಗದ ಆಯಾಮವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಯಾವುದೇ ನಿರ್ದಿಷ್ಟ ಕೋನದ ಸ್ಪರ್ಶಕ, ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ಯಾವುದೇ ಆಯಾಮವನ್ನು ಹೊಂದಿಲ್ಲ. ಸಂಪೂರ್ಣ ಸ್ಪಷ್ಟತೆಗಾಗಿ, ಯಾವುದೇ ಅಕ್ಷಗಳ ಮೇಲೆ ಘಟಕದ ಮಾಪಕಗಳನ್ನು ಬದಲಾಯಿಸಲು ಪ್ರಯತ್ನಿಸಿ. ಜ್ಯಾಮಿತೀಯ ಕೋನ(ಪ್ರೊಟ್ರಾಕ್ಟರ್ನಿಂದ ಅಳೆಯಲಾಗುತ್ತದೆ) ಬದಲಾಗುತ್ತದೆ, ಆದರೆ ದೇಹದ ವೇಗವು ಬದಲಾಗುವುದಿಲ್ಲ.
- ಪ್ರಶ್ನೆ:ಪ್ಯಾಲೆಟ್ನೊಂದಿಗೆ ವೇಗದ ಗ್ರಾಫ್ ಅಡಿಯಲ್ಲಿ ಪ್ರದೇಶವನ್ನು ಅಳೆಯಲು ಸಾಧ್ಯವೇ?
- ಉತ್ತರ:ಇಲ್ಲ! ಈ ವಿಷಯದಲ್ಲಿ, ನೀವು ಹಿಂದಿನದಕ್ಕೆ ಹೋಲುವ ತಾರ್ಕಿಕತೆಯನ್ನು ಅನ್ವಯಿಸಬಹುದು. ಅಕ್ಷಗಳ ಪ್ರಮಾಣವನ್ನು ಬದಲಾಯಿಸುವಾಗ, ಪ್ಯಾಲೆಟ್ ಬಳಸಿ ನಿರ್ಧರಿಸಲಾದ ಗ್ರಾಫ್ ಅಡಿಯಲ್ಲಿರುವ ಪ್ರದೇಶವು ಬದಲಾಗುತ್ತದೆ, ಆದರೆ ದೇಹವು ಪ್ರಯಾಣಿಸುವ ಮಾರ್ಗವು ಬದಲಾಗುವುದಿಲ್ಲ.
- ಪ್ರಶ್ನೆ:ಎರಡು ದೇಹಗಳ ಸಭೆಯ ಸ್ಥಳ ಮತ್ತು ಸಮಯವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸುವುದು?
- ಉತ್ತರ:ಎರಡು ಕಾಯಗಳ ಸಭೆಯ ಬಿಂದುವು ಅವುಗಳ ಗ್ರಾಫ್ಗಳ ಛೇದನದ ಬಿಂದುವಾಗಿದೆ. ಈ ಬಿಂದುವನ್ನು ಸಮಯದ ಅಕ್ಷದ ಮೇಲೆ ಪ್ರಕ್ಷೇಪಿಸುವ ಮೂಲಕ, ನೀವು ದೇಹಗಳ ಸಭೆಯ ಸಮಯವನ್ನು ನಿರ್ಧರಿಸುತ್ತೀರಿ ಮತ್ತು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷದ ಮೇಲೆ - ಎರಡು ದೇಹಗಳ ಸಭೆಯ ನಿರ್ದೇಶಾಂಕ.
- ಪ್ರಶ್ನೆ:ಸಮಯದ ಅಕ್ಷದೊಂದಿಗೆ ಸಮಯ ಗ್ರಾಫ್ ವಿರುದ್ಧ ನಿರ್ದೇಶಾಂಕದ ಛೇದನದ ಬಿಂದುವಿನ ಅರ್ಥವೇನು?
- ಉತ್ತರ:ಈ ಹಂತವು ದೇಹವು ಮೂಲವನ್ನು ಹಾದುಹೋಗುವ ಸಮಯದಲ್ಲಿ ಕ್ಷಣವಾಗಿದೆ.