Ако траекторията на материална точка е крива линия, тогава ще наречем такова движение криволинейно.
С това движение тя се променя както по величина, така и по посока. Следователно, когато криволинейно движение.
 Нека разгледаме движението на материална точка криволинейна траектория(фиг. 2.11). Векторът на скоростта във всяка точка на траекторията е насочен тангенциално към нея. Нека скоростта е в точка M 0, а в точка M – . В този случай смятаме, че интервалът от време Dt по време на прехода от точка M 0 до точка M е толкова малък, че промяната на ускорението по големина и посока може да бъде пренебрегната.
Нека разгледаме движението на материална точка криволинейна траектория(фиг. 2.11). Векторът на скоростта във всяка точка на траекторията е насочен тангенциално към нея. Нека скоростта е в точка M 0, а в точка M – . В този случай смятаме, че интервалът от време Dt по време на прехода от точка M 0 до точка M е толкова малък, че промяната на ускорението по големина и посока може да бъде пренебрегната.
 Вектор за промяна на скоростта. (IN в този случайразликата на 2 вектора ще бъде равна на ). Нека разложим вектора, който характеризира промяната в скоростта както по големина, така и по посока, на два компонента и. Компонентата, която е допирателна към траекторията в точка M 0, характеризира промяната на скоростта по величина за времето Dt, през което е премината дъгата M 0 M и се нарича тангенциаленкомпонент на вектора на промяна на скоростта (). Векторът, насочен в границата, когато Dt ® 0, по протежение на радиуса към центъра, характеризира промяната на скоростта в посока и се нарича нормален компонент на вектора на промяна на скоростта ().
Вектор за промяна на скоростта. (IN в този случайразликата на 2 вектора ще бъде равна на ). Нека разложим вектора, който характеризира промяната в скоростта както по големина, така и по посока, на два компонента и. Компонентата, която е допирателна към траекторията в точка M 0, характеризира промяната на скоростта по величина за времето Dt, през което е премината дъгата M 0 M и се нарича тангенциаленкомпонент на вектора на промяна на скоростта (). Векторът, насочен в границата, когато Dt ® 0, по протежение на радиуса към центъра, характеризира промяната на скоростта в посока и се нарича нормален компонент на вектора на промяна на скоростта ().
По този начин векторът на промяна на скоростта равно на суматадва вектора ![]() .
.
Тогава можем да напишем това
При безкрайно намаляване на Dt®0, ъгълът Da при върха DM 0 AC ще клони към нула. Тогава векторът може да бъде пренебрегнат в сравнение с вектора и вектора
![]()
ще изрази тангенциално ускорениеи характеризират скоростта на промяна на скоростта на движение по величина. Следователно тангенциалното ускорение е числено равно на производната на модула на скоростта по отношение на времето и е насочено тангенциално към траекторията.
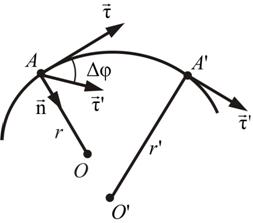
Нека сега изчислим вектора, наречен нормално ускорение. При достатъчно малък Dt участъкът от кривата траектория може да се счита за част от окръжността. В този случай радиусите на кривината M 0 O и MO ще бъдат равни един на друг и равни на радиуса на окръжността R.
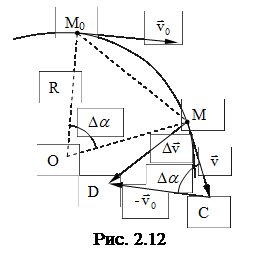
Нека повторим рисунката. ÐM 0 OM = ÐMSD, като ъгли с взаимно перпендикулярни страни (фиг. 2. 12). За малък Dt можем да разгледаме |v 0 |=|v|, следователно DM 0 OM = DMDC са подобни на равнобедрени триъгълницис еднакви ъглина върха.
Следователно от фиг. Следва 2.11
 Þ ,
Þ ,
но DS = v ср. ×Dt, тогава .
Преминавайки към границата при Dt ® 0 и като вземем предвид, че в този случай v av. = v намираме
 , т.е. (2,5)
, т.е. (2,5)
защото при Dt ® 0 ъгъл Da ® 0, тогава посоката на това ускорение съвпада с посоката на радиуса на кривината R или с посоката на нормалата към скоростта, т.е. вектор Следователно това ускорение често се нарича центростремителен. Характеризира скоростта на промяна на скоростта на движение по посока.
Общото ускорение се определя от векторната сума на тангенциалното и нормалното ускорение (фиг. 2.13). защото векторите на тези ускорения са взаимно перпендикулярни, тогава модулът на общото ускорение е равен на  ; Посоката на пълното ускорение се определя от ъгъла j между векторите и:
; Посоката на пълното ускорение се определя от ъгъла j между векторите и:
Кинематика на въртеливото движение.
Ъглова скорост.
ОПРЕДЕЛЕНИЕ: Ротационно движениеще наречем такова движение, при което всички точки са абсолютно твърдоописват окръжности, чиито центрове лежат на една и съща права линия, наречена ос на въртене.
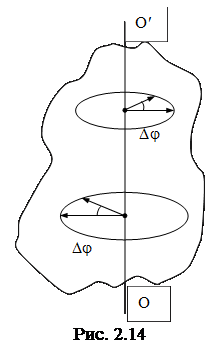 Като координата, която определя позицията на точка по време на въртеливо движение, вземете ъгъла, който характеризира моментната позиция на радиус-вектора, изтеглен от центъра на въртене към въпросната точка (фиг. 2.14)
Като координата, която определя позицията на точка по време на въртеливо движение, вземете ъгъла, който характеризира моментната позиция на радиус-вектора, изтеглен от центъра на въртене към въпросната точка (фиг. 2.14)
За да се характеризира въртеливото движение, се въвежда концепцията ъглова скорост
Векторът е насочен по оста, около която тялото се върти в определената посока правило за десен винт(фиг. 2.15).
Големината на вектора на ъгловата скорост е равна на . Ако = const, тогава такова движение се нарича равномерно и следователно при t 0 = 0 получаваме .
Ако й 0 = 0, тогава j = w tили .
Така с равномерно движение wпоказва ъгъла, под който тялото се завърта за единица време. Размер на ъгловата скорост [ w]=рад/сек.
Равномерното въртене може да се характеризира с периода на въртене T, който се разбира като времето, през което тялото прави едно пълен оборот, т.е. се завърта на ъгъл от 2p. В този случай, следователно.
Честота на въртене (брой обороти за единица време): n=1/T=w/2p. Следователно w=2pn.
Допълнение 1.
Завъртането на тялото на определен малък ъгъл dj може да се зададе под формата на сегмент, чиято дължина е равна на dj, а посоката съвпада с оста, около която се извършва въртенето. По този начин въртенето на тялото може да се припише на някои числова стойности посока. В този случай посоката на вектора може да се определи, като се свърже с посоката на въртене на тялото. Такива вектори се наричат аксиаленили псевдовектори, за разлика от истинските или поляренвектори, за които посоката се определя естествено ( , , и т.н.), по време на операцията на инверсия на координатната система (x → -x', y → -y', z → -z'), последните променят знака си на обратното: .
Векторът на ъгловата скорост може да се промени както поради промяна в скоростта на въртене на тялото около оста (в този случай се променя по величина), така и поради въртене на оста на въртене в пространството (в този случай се променя в посока). За да се характеризира скоростта на изменение, физическо количество, наречено ъглово ускорение.
ОПРЕДЕЛЕНИЕ: Средно ъглово ускорениесе нарича величина , където Dt е периодът от време, през който се е променила ъгловата скорост.
ОПРЕДЕЛЕНИЕ: Незабавно ускорениесе нарича количество, равно на ;
Ако посоката на оста на въртене в пространството е постоянна, тогава ъгловата скорост се променя само по големина и в този случай  .
.
Ако под e имаме предвид проекцията на вектора върху посоката, тогава последната формула ще приеме формата ![]() . Тук e е алгебрична величина и
. Тук e е алгебрична величина и
ако w, тогава e>0 (вектори и една посока),
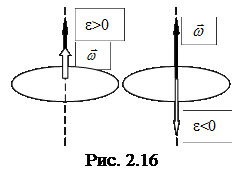 ако w ¯ тогава e<0 ( ¯ ).
ако w ¯ тогава e<0 ( ¯ ).
1) Ако e>0 Þ въртенето е равномерно ускорено ( ) (фиг. 2.16).
2) Ако e<0 – ( ¯ ) (рис. 2.16).
В системата SI [e] = rad/s 2.
За равномерно ускорено движение:
следователно w = w 0 + e (t - t 0). При t 0 = 0 получаваме w = w 0 + e·t.
Накрая
Сега да инсталираме
Движението на точка също се характеризира с ускорение - скоростта на промяна на скоростта. Ако скоростта на точка се промени със стойност за произволно време, тогава стойността
Нарича се средното ускорение на точката през това време. Ускорение в в моментавреме:
тези. векторът е равен на производната по време. Посоката на вектора съвпада с посоката на увеличението на скоростта за . Тъй като, , ускорението на точка може да бъде записано като втората производна по отношение на времето на радиус вектора:
Векторът на ускорението може да бъде разширен в компоненти: ![]() ; Къде
; Къде ![]() , съответно, ...проекции на ускорението върху координатните оси.
, съответно, ...проекции на ускорението върху координатните оси.
Ако траекторията на точка е плоска крива, тогава за описание на движението можете да изберете две посоки, перпендикулярни една на друга: допирателна към траекторията (ort) и нормална към нея (ort). След това се разлага на компоненти.
Тъй като векторът на скоростта, замествайки тук елементарното преместване ![]() , получаваме за скорост: .
, получаваме за скорост: .
След това, за да ускорим точката, можем да напишем:
![]() ;
;
От фиг. ясно е, че има разлика между векторите и . Вижда се, че има увеличение на единичния вектор на допирателната към траекторията, съответстваща на елементарния път във времето.

| |
Когато се движите по път с дължина, единичният вектор се завърта на ъгъл. От равнобедрен триъгълник от вектори ![]() , поради малкия си размер;
, поради малкия си размер;
Посоката съвпада с единичния вектор: когато векторът стане перпендикулярен. Тогава производната:
И пълното ускорение на точката
От това се вижда, че тангенциалното (тангенциалното) ускорение характеризира скоростта на промяна на модула на скоростта. С ускорено движение и съвпада с, с бавно движение и обратно.
Нормалното ускорение характеризира скоростта на промяна в посоката на вектора на скоростта. Тя е насочена към центъра на кривината на траекторията; ; затова се нарича още центростремителна. При движение по права линия.
Модул за пълно ускорение
При ускорено движение ъгълът е остър, Фиг. , при забавен каданс - тъп (ъгъл между и ). Ако една точка се движи равномерно по окръжност, т.е. , тогава и , т.е. перпендикулярна на допирателната към траекторията.
Динамика на транслационното движение
Движение напред
Най-простият тип механично движение на твърдо тяло е транслационното движение, при което права линия, свързваща произволни две точки от тялото, се движи с тялото, оставайки успоредна | в първоначалното си положение (топка върху пружина спрямо Земята, бутало в неподвижен цилиндър на двигател, асансьор, струг и др.). Траекториите на всички точки на тялото са еднакви. Радиуси - векторите на всички точки на тялото се променят еднакво във времето, скоростите на всички точки и техните ускорения са еднакви:
; ![]()
тези. за да опишете движението, можете да вземете една точка от тялото; ако в същото време , тогава чрез интегриране намираме скоростта на точката:
; След това, интегрирайки скоростта, намираме координатата:
Закон за инерцията.
Класическата механика се основава на трите закона на Нютон, формулирани от него в есето му „Математически принципи на естествената философия“, публикувано през 1687 г. Тези закони са резултат от блестящо обобщение на експериментални данни и теоретични закони в областта на механиката, които са установени от Нютон, както и от Кеплер. Галилей, Хюйгенс. Гук и др.
Като първи закон на динамиката Нютон приема закона, установен от Галилей:
Всяко тяло поддържа състояние на покой или униформа праволинейно движениедокато външно влияние не принуди това състояние да се промени.
Този закон гласи, че не се изисква състояние на покой или равномерно линейно движение външни влияния. Това разкрива едно особено динамично свойство на телата, т.нар инерция. Следователно първият закон на Нютон се нарича още закон за инерцията, а движението на тялото при липса на външни въздействия се нарича движение по инерция.
В тази формулировка на закона се приема, че тялото не е деформирано, т.е. тя е абсолютно твърда и че се движи напред. Въпреки това, твърдото тяло все още може да се върти равномерно по инерция, като същевременно има ускорение. Необходимостта от всички тези резерви отпада, ако в първия закон на Нютон говорим не за тяло, а за материална точка, която по дефиниция не може нито да се деформира, нито да се върти.
Следователно за материална точка те използват следната формула:
материална точкаподдържа състояние на покой или равномерно праволинейно движение, докато външно въздействие не го изведе от това състояние.
Измерение на пространството
Измерението се разбира като броя на измерванията, които трябва да се направят, за да се определи недвусмислено местоположението на определена точка. Така че, за да се определи недвусмислено местоположението на точка в пространството в определен момент от времето, е необходимо и достатъчно да се посочат нейните три координати. В най-разпространената правоъгълна декартова координатна система това е x, y, z -дължина, ширина и височина (фиг. 5.2, α); в сферична координатна система трябва да посочите радиус вектора rи ъгли α и β (фиг. 5.2, b);в цилиндрична система – вис ч,радиус вектор rи ъгъл α (фиг. 5.2, V).
Смята се, че всички материални процеси и взаимодействия се осъществяват именно в пространството на трите измерения. В едномерно (линия) или двумерно (плоскост) пространство не могат да възникнат взаимодействия на частици и полета. Трите измерения са необходим и достатъчен минимум, в рамките на който могат да възникнат всички видове взаимодействия на материални обекти.
Понастоящем не са известни форми на движение и взаимодействие, които изискват четири- или петизмерно пространство, и възможността за такива процеси не следва от никакви установени закони на природата.
В литературата има чести дискусии относно възможността за съществуване на пространства с повече измерения. Така напоследък се издига хипотеза за реални 11 измерения в микросвета в първите моменти от раждането на нашата Вселена: 10 – пространствени и едновременни; след това те образуват 4-измерен пространствено-времеви континуум. Тази хипотеза е свързана със следните обстоятелства. В математиката и физиката концепцията за многоизмерност ( п-дименсионални) пространства. Тази математическа абстракция играе важна роля. Всяка координата на многомерното пространство може да посочи всяко свойство на разглежданата физическа реалност - температура, плътност, скорост, маса и др. Ако броят на тези параметри, заедно с пространствено-времевите характеристики, е равен на п,тогава се счита, че те образуват „-измерно пространство, а специфичните стойности на свойствата се определят като точки в „-измерното пространство. С достатъчно голям брой свойства и взаимосвързани променливи може да се стигне до концепцията за многоизмерно и дори безкрайно измерно пространство. Понятието пространство обаче тук е от условен характер, тъй като се използва за характеризиране на напълно различни свойства.
Измерение на времето
Що се отнася до размерността на времето, те най-често посочват неговата едномерност: за да се определи времето, достатъчно е да се посочи една координата. Според С.Т. Мелюхина, ако времето имаше не едно, а две, три или повече измерения, то това би означавало, че успоредно на нашия свят съществуват подобни и по никакъв начин не свързани с нашите светове-близнаци, в които едни и същи събития се развиват в една и съща последователност. Съответно всеки човек би трябвало да има двойници във всеки от паралелните светове. Но няма основание за подобни предположения.
Друга гледна точка споделя руският географ Ю.Г. Симонов. Той смята, че е напълно възможно да се предложи двуизмерен модел на времето, полезен за описание и изучаване на определен клас събития, и го разглежда на примера на определени географски явления. Тук трябва да си спомним за два вида време - слънчево и лунно. Различни събития могат да бъдат свързани с фазите на лунния и слънчевия календар. Известно е, че тези времеви вектори са независими и извън фаза и техните периоди не са кратни един на друг. Така, изучавайки явленията на Земята, сред тях могат да се намерят такива, които са свързани само с гравитационните полета Земя – Луна и Земя – Слънце. Тези полета могат да се припокриват едно с друго, понякога сумиране, понякога изваждане. В този случай можем да говорим за изучаване на гравитационна система от три тела. В такава система броят на времевите вектори съвпада с броя на степените на свобода. Нека оста е в пространството на два времеви вектора Xсъвпада с вектора на слънчевото време, а оста y -с луната. По време на фазата на новолунието силите на лунната и слънчевата гравитация се събират, а по време на фазата на пълнолуние се изваждат. Следователно по време на фазата на новолуние Земята и Слънцето изпитват максимални гравитационни смущения, а по време на фазата на пълнолуние Луната и Слънцето изпитват максимални гравитационни смущения; Минималният гравитационен интензитет на Земята възниква при пълнолуние, когато се извадят гравитационните полета. Така на Земята гравитационното напрежение нараства от пълнолуние до новолуние и след това намалява. При увеличаване на гравитационната вълна възникват едни ефекти, а на фона на намаляване (облекчаване) на напрежението се появяват други. Така тектоничните пукнатини се компресират и разширяват в различни фази; процесите, свързани с пукнатинно-порното налягане на подпочвените води, протичат с различна сила и т.н.
В общия случай, според Симонов, може да има не два, а повече времеви вектора. Изборът на многоизмерен модел на времето (по-специално, определянето на броя на времевите вектори) може да се извърши доста просто в случай, че процесите, които се изучават, са причинно независими един от друг и могат да се представят като циклично проявени, а циклите може да продължи не часове и дни, а години, векове и дори хилядолетия.
Ускорение
Ускорениее величина, която характеризира скоростта на изменение на скоростта.
Например, когато колата тръгне, тя увеличава скоростта си, тоест се движи по-бързо. Първоначално скоростта му е нула. След като се движи, колата постепенно ускорява до определена скорост. Ако по пътя му светне червен светофар, колата ще спре. Но няма да спре веднага, а след време. Тоест скоростта му ще намалее до нула - колата ще се движи бавно, докато спре напълно. Във физиката обаче няма термин „забавяне“. Ако едно тяло се движи, забавяйки се, това също ще бъде ускорение на тялото, само със знак минус (както си спомняте, скорост
- Това векторно количество).
Средно ускорение
Средното ускорение е съотношението на промяната в скоростта към периода от време, през който е настъпила тази промяна. Средното ускорение може да се определи по формулата:
къде - вектор на ускорение.
Посоката на вектора на ускорението съвпада с посоката на промяна на скоростта Δ = - 0 (тук 0 е начална скорост, тоест скоростта, с която тялото започва да се ускорява).
В момент t1 (виж фиг. 1.8) тялото има скорост 0. В момент t2 тялото има скорост. Според правилото за векторно изваждане намираме вектора на промяна на скоростта Δ = - 0. Тогава можете да определите ускорението по следния начин:
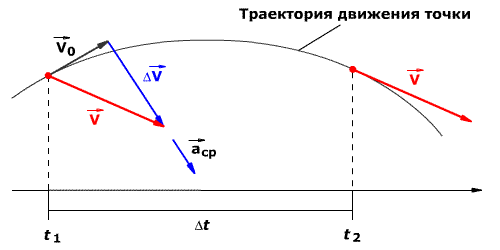
ориз. 1.8. Средно ускорение.
В SI единица за ускорение– е 1 метър в секунда в секунда (или метър в секунда на квадрат), т.е
Метър в секунда на квадрат равно на ускорениеправолинейно движеща се точка, в която за една секунда скоростта на тази точка нараства с 1 m/s. С други думи, ускорението определя колко се променя скоростта на тялото за една секунда. Например, ако ускорението е 5 m/s 2, това означава, че скоростта на тялото се увеличава с 5 m/s всяка секунда.
Моментното ускорение на тяло (материална точка) в даден момент от време е физическа величина, равен на лимита, към което средното ускорение клони, когато интервалът от време клони към нула. С други думи, това е ускорението, което тялото развива за много кратък период от време:
Посоката на ускорението също съвпада с посоката на промяна на скоростта Δ за много малки стойности на интервала от време, през който се извършва промяната на скоростта. Векторът на ускорението може да бъде определен чрез проекции върху съответните координатни оси в дадена отправна система (проекции a X, a Y, a Z).
При ускорено праволинейно движение скоростта на тялото нараства по абсолютна стойност, т.е
V 2 > v 1
и посоката на вектора на ускорението съвпада с вектора на скоростта 2.
Ако скоростта на едно тяло намалее по абсолютна стойност, т.е
V 2< v 1
тогава посоката на вектора на ускорението е противоположна на посоката на вектора на скоростта 2. С други думи, в този случай това, което се случва, е забавяне, в този случай ускорението ще бъде отрицателно (и< 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
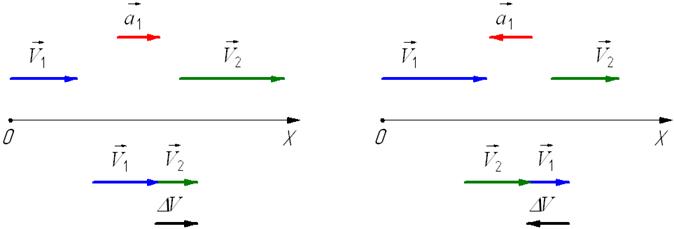
ориз. 1.9. Незабавно ускорение.
При движение по крива пътека се променя не само модулът на скоростта, но и посоката му. В този случай векторът на ускорението е представен като два компонента (вижте следващия раздел).
Тангенциално ускорение
Тангенциалното (тангенциалното) ускорение е компонентът на вектора на ускорението, насочен по допирателната към траекторията в дадена точка от траекторията на движение. Тангенциалното ускорение характеризира промяната на скоростта по модул по време на криволинейно движение.
ориз. 1.10. Тангенциално ускорение.
Посоката на вектора на тангенциалното ускорение τ (виж фиг. 1.10) съвпада с посоката на линейната скорост или е противоположна на нея. Тоест векторът на тангенциалното ускорение лежи на една и съща ос с допирателната окръжност, която е траекторията на тялото.
Нормално ускорение
Нормалното ускорение е компонентът на вектора на ускорението, насочен по нормалата към траекторията на движение в дадена точка от траекторията на тялото. Тоест векторът на нормалното ускорение е перпендикулярен на линейната скорост на движение (виж фиг. 1.10). Нормалното ускорение характеризира промяната на скоростта в посока и се обозначава с буквата n. Векторът на нормалното ускорение е насочен по радиуса на кривината на траекторията.
Пълно ускорение
Общото ускорение по време на криволинейно движение е сумата от тангенциалното и нормалното ускорение векторно правило за добавяне и се определя по формулата:
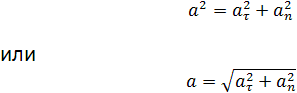
(според Питагоровата теорема за правоъгълен правоъгълник).
Определя се и посоката на пълното ускорение векторно правило за добавяне : = τ + n
Тангенциално (тангенциално) ускорение е компонентът на вектора на ускорението, насочен по допирателната към траекторията в дадена точка от траекторията на движение. Тангенциалното ускорение характеризира промяната на скоростта по модул по време на криволинейно движение.
Посокавектор на тангенциалното ускорение алежи на една ос с допирателната окръжност, която е траекторията на тялото.
Нормално ускорение- това е компонентът на вектора на ускорението, насочен по нормалата към траекторията на движение в дадена точка от траекторията на тялото.
 вектор
перпендикулярна на линейната скорост на движение, насочена по радиуса на кривината на траекторията.
вектор
перпендикулярна на линейната скорост на движение, насочена по радиуса на кривината на траекторията.
Формула за скорост за равномерно ускорено движение
Прогресивен и въртеливо движениетвърдо тяло.
Движение напред
- движение, при което всички точки на тялото се движат по една и съща траектория.
Има два вида движение напред: равномерно и неравномерно.
Ротационно движение е движението на тялото около определена ос. При такова движение всички точки на тялото се движат в кръгове, чийто център е тази ос.
Ъглова скорост. Ъглово ускорение .
Ъглова скорост - векторна величина, която е псевдовектор (аксиален вектор) и характеризира скоростта на въртене на материална точка около центъра на въртене. Вектор на ъгловата скорост в големина равен на ъгълвъртене на точка около центъра на въртене за единица време:
![]()
Ъглово ускорение - физична величина псевдовектор, равна на първата производна на псевдовектора на ъгловата скорост по отношение на времето
Ъгловото ускорение характеризира интензивността на промяна на модула и посоката на ъгловата скорост по време на движението на твърдо тяло
![]()
Връзка между линейна скорост и ъглова скорост и тангенциално ускорение с ъглова скорост.
Отделните точки на въртящо се тяло имат различни линейни скорости. Скоростта на всяка точка, насочена тангенциално към съответния кръг, непрекъснато променя посоката си. Големината на скоростта се определя от скоростта на въртене на тялото и разстоянието R на въпросната точка от оста на въртене. Оставете тялото да се завърти под ъгъл за кратък период от време (фиг. 2.4). Точка, разположена на разстояние R от оста, изминава път, равен на
Линейна скоростточки по дефиниция.
Първият закон на Нютон (или закон на инерцията)
Има такива референтни системи, спрямо които изолирани транслационно движещи се тела запазват скоростта си непроменена по големина и посока.
Инерционна системаобратно броене е такава отправна система, спрямо която материална точка, свободна от външни влияния, е или в покой, или се движи праволинейно и равномерно (т.е. с постоянна скорост).
В природата има четири тип взаимодействие
1. Гравитация (гравитационна сила) е взаимодействието между телата, които имат маса.
2. Електромагнитни - важи за тела с електрически заряд, отговорен за механични сили като триене и еластичност.
3. Силно - късодействащо взаимодействие, тоест действа на разстояние от порядъка на размера на ядрото.
4. Слаб. Такова взаимодействие е отговорно за някои видове взаимодействия между елементарните частици, за някои видове β-разпад и за други процеси, протичащи вътре в атома, атомното ядро.
Тегло - е количествени характеристикиинертни свойства на тялото. Той показва как тялото реагира на външни влияния.
Сила - е количествена мярка за действието на едно тяло върху друго.
Втори закон на Нютон.
Силата, действаща върху тялото, е равна на произведението от масата на тялото и ускорението, придадено от тази сила: F=ma
Измерено в
Физическо количество, равно на произведениетомасата на тялото към скоростта на движението му се нарича импулс на тялото (или количество движение). Импулсът на тялото е векторна величина. Единицата SI за импулс е килограм-метър в секунда (kg m/s).
Изразяване на втория закон на Нютон чрез промяна на импулса на тялото
Еднообразно движение – това е движение с постоянна скорост, тоест когато скоростта не се променя (v = const) и не се получава ускорение или забавяне (a = 0).
Движение по права линия - това е движение по права линия, т.е. траекторията на праволинейното движение е права линия.
Равноускорено движение - движение, при което ускорението е постоянно по големина и посока.