Статика твердого тела
Статика рассматривает условия равновесия тела или системы тел. Если на покоящееся тело действует несколько сил, направления которых пересекаются в одной точке, то оно останется в покое тогда, когда сумма (векторная) этих сил равна нулю. Точку приложения силы можно смещать вдоль линии ее действия.
Центр тяжести твердого тела или системы тел
На каждую частицу тела действует сила тяжести. Точка, в которой приложена равнодействующая сил тяжести, действующих на отдельные точки тела, называется центром тяжести . Сумма моментов сил тяжести всех частиц тела относительно центра тяжести равна нулю.
Виды равновесия тел
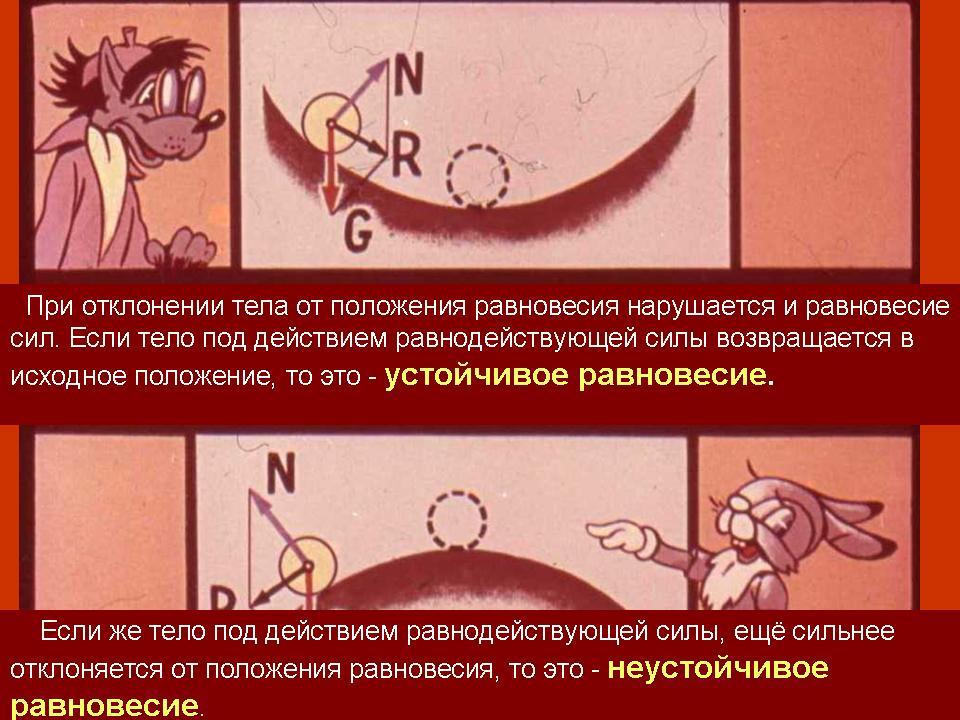
Если при достаточно малом отклонении тела от положения равновесия возникают силы, стремящиеся вернуть тело в первоначальное положение, то такое равновесие называется устойчивым .
Обычно после действия малых возмущений (смещений, толчков) на тело, находящееся в устойчивом равновесии, оно начинает совершать колебания с малой амплитудой около положения равновесия; эти колебания затем затухают вследствие трения и равновесия восстанавливается.
В положении устойчивого равновесия потенциальная энергия тела имеет минимальное значение (при действии консервативных сил).
Если же при сколь угодно малом отклонении тела от положения равновесия возникают силы, стремящиеся увеличить это отклонение, то такое положение называют неустойчивым .
В безразличном положении равновесия при отклонении тела не возникает никаких сил, и новое положение также является положением равновесия.
Условия равновесия на наклонной плоскости
Для равновесия тела, имеющего вес P , на наклонной плоскости, составляющей угол α с горизонтом, нужно приложить силу F , равную F 1 , причем F 1 =P sinα сила F должна быть направлена вдоль наклонной плоскости (рис.1). При этом тело давит на наклонную плоскость с силой F 2 =P sinα , а наклонная плоскость с такой же силой действует на лежащее на ней тело. Свободно лежащее тело будет покоится на наклонной плоскости, пока скатывающая сила не станет больше силы трения покоя. Это произойдет, когда tgα > k , где k – коэффициент трения покоя.
Условия равенства моментов сил применяются также к равновесия ворота (рис.3,а) или лебедки.
Блоки
Неподвижный блок (рис.3,б) служит только для изменения направления действующей силы. Подвижный блок (рис.3,в) позволяет получить выигрыш в силе. При покоящемся или равномерно вращающемся подвижном блоке сумма всех действующих сил и сумма всех моментов сил равны нулю.
Отсюда следует, что
Полиспаст (рис.4) представляет собой систему подвижных и неподвижных блоков, соединенных в общем держателе. Если полиспаст имеет n подвижных и n неподвижных блоков, то сила F , уравновешивающая силу P , равна F = P /2n .
При отсутствии трения сила P , действующая по оси винта, уравновешивается силой F , приложенной к рукоятке (рис.5):
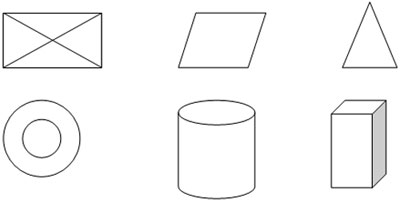
| Тело | Положение центра тяжести |
|---|---|
| Тонкий стержень | На середине стержня |
| Цилиндр или призма | На середине прямой, соединяющей центры оснований цилиндра или призмы |
| Шар | В центре |
| Плоский сегмент малой толщины | На оси симметрии, смещен от основания на 2/5 его высоты |
| Пирамида или конус | На отрезке, соединяющем вершину с центром основания; смещен на ¼ этого отрезка |
| Полушарие | На оси симметрии, смещен от центра на 3/8 радиуса |
| Сплошная треугольная пластина малой толщины | В точке пересечения медиан |













![]()






 Назад
Вперёд
Назад
Вперёд
Внимание! Предварительный просмотр слайдов используется исключительно в ознакомительных целях и может не давать представления о всех возможностях презентации. Если вас заинтересовала данная работа, пожалуйста, загрузите полную версию.
Цели урока: Изучить состояние равновесия тел, познакомиться с различными видами равновесия; выяснить условия, при которых тело находится в равновесии.
Задачи урока:
- Учебные: Изучить два условия равновесия, виды равновесия (устойчивое, неустойчивое, безразличное). Выяснить, при каких условиях тела более устойчивы.
- Развивающие: Способствовать развитию познавательного интереса к физике. Развитие навыков сравнивать, обобщать, выделять главное, делать выводы.
- Воспитательные: Воспитывать внимание, умения высказывать свою точку зрения и отстаивать её, развивать коммуникативные способности учащихся.
Тип урока: урок изучения нового материала с компьютерной поддержкой.
Оборудование:
- Диск «Работа и мощность» из «Электронных уроков и тестов.
- Таблица «Условия равновесия».
- Призма наклоняющаяся с отвесом.
- Геометрические тела: цилиндр, куб, конус и т.д.
- Компьютер, мултимедиапроектор, интерактивная доска или экран.
- Презентация.
Ход урока
Сегодня на уроке мы узнаем, почему подъёмный кран не падает, почему игрушка «Ванька-встанька» всегда возвращается в исходное состояние, почему Пизанская башня не падает?
I. Повторение и актуализация знаний.
- Сформулировать первый закон Ньютона. О каком состоянии говорится в законе?
- На какой вопрос отвечает второй закон Ньютона? Формула и формулировка.
- На какой вопрос отвечает третий закон Ньютона? Формула и формулировка.
- Что называется равнодействующей силой? Как она находится?
- Из диска «Движение и взаимодействие тел» выполнить задание № 9 «Равнодействующая сил с разными направлениями» (правило сложения векторов (2, 3 упражнения)).
II. Изучение нового материала.
1. Что называется равновесием?
Равновесие – это состояние покоя.
2. Условия равновесия. (слайд 2)
а) Когда тело находится в покое? Из какого закона это следует?
Первое условие равновесия: Тело находится в равновесии, если геометрическая сумма внешних сил, приложенных к телу, равна нулю. ∑F = 0
б) Пусть на доску действуют две равные силы, как показано на рисунке.
Будет ли она находиться в равновесии? (Нет, она будет поворачиваться)
В покое находится только центральная точка, а остальные движутся. Значит, чтобы тело находилось в равновесии, необходимо, чтобы сумма всех сил, действующих на каждый элемент равнялась 0.
Второе условие равновесия: Сумма моментов сил, действующих по часовой стрелке, должна равняться сумме моментов сил, действующих против часовой стрелки.
∑ M по часовой = ∑ M против часовой
Момент силы: M = F L
L – плечо силы – кратчайшее расстояние от точки опоры до линии действия силы.
3. Центр тяжести тела и его нахождение. (слайд 4)
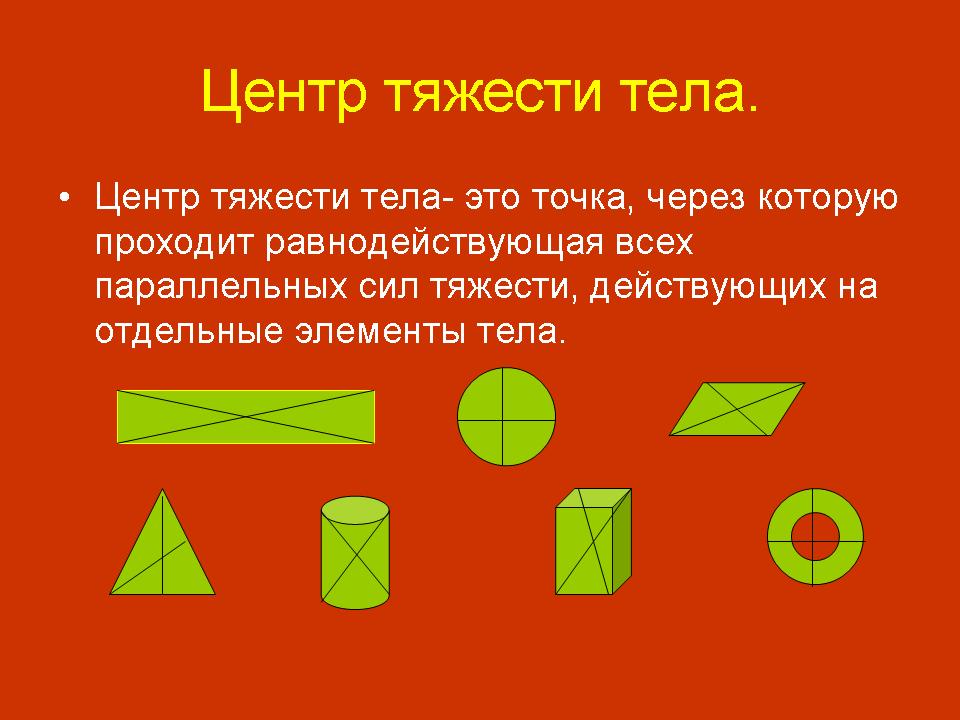
Центр тяжести тела – это точка, через которую проходит равнодействующая всех параллельных сил тяжести, действующих на отдельные элементы тела (при любом положении тела в пространстве).
Найти центр тяжести следующих фигур:
4. Виды равновесия.
а) (слайды 5–8)


Вывод: Равновесие устойчиво, если при малом отклонении от положения равновесия есть сила, стремящаяся вернуть его в это положение.
Устойчиво то положение, в котором его потенциальная энергия минимальна. (слайд 9)
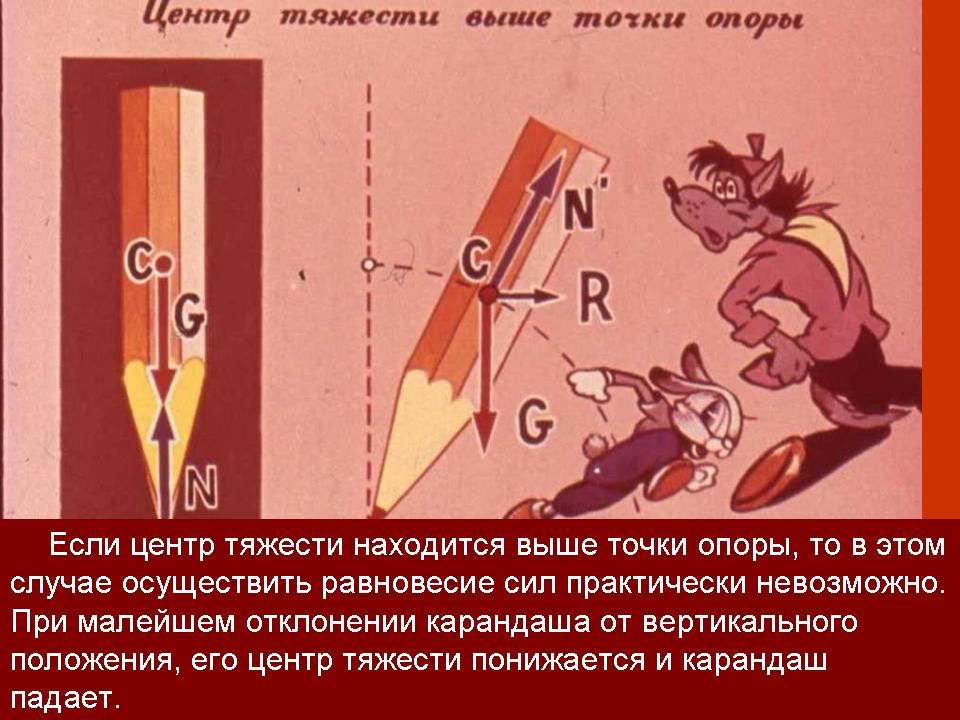
б) Устойчивость тел, находящихся на точке опоры или на линии опоры. (слайды 10–17)
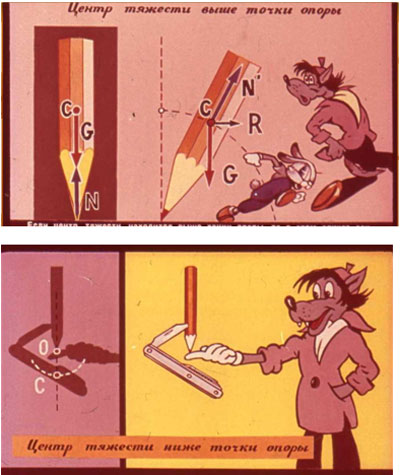
Вывод: Для устойчивости тела, находящегося на одной точке или линии опоры необходимо, чтобы центр тяжести находился ниже точки (линии) опоры.
в) Устойчивость тел, находящихся на плоской поверхности.
(слайд 18)
1) Поверхность опоры – это не всегда поверхность, которая соприкасается с телом (а та, которая ограниченна линиями, соединяющими ножки стола, треноги)
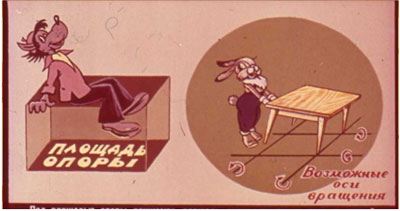
2) Разбор слайда из «Электронных уроков и тестов», диск «Работа и мощность», урок «Виды равновесия».
Рисунок 1.
- Чем различаются табуретки? (Площадью опоры)
- Какая из них более устойчивая? (С большей площадью)
- Чем различаются табуретки? (Расположением центра тяжести)
- Какая из них наиболее устойчива? (Укоторой центр тяжести ниже)
- Почему? (Т.к. её можно отклонить на больший угол без опрокидывания)
3) Опыт с призмой отклоняющейся
- Поставим на доску призму с отвесом и начнём её постепенно поднимать за один край. Что мы видим?
- Пока линия отвеса пересекает поверхность, ограниченную опорой, равновесие сохраняется. Но как только вертикаль, проходящая через центр тяжести, начнёт выходить за границы поверхности опоры, этажерка опрокидывается.
Разбор слайдов 19–22 .
![]()
Выводы:
- Устойчиво то тело, у которого площадь опоры больше.
- Из двух тел одинаковой площади устойчиво то тело, у которого центр тяжести расположен ниже, т.к. его можно отклонить без опрокидывания на большой угол.
Разбор слайдов 23–25.

Какие корабли наиболее устойчивы? Почему? (У которых груз расположен в трюмах, а не на палубе)

Какие автомобили наиболее устойчивы? Почему? (Чтобы увеличить устойчивость машин на поворотах, полотно дороги наклоняют в сторону поворота.)
Выводы: Равновесие может быть устойчивым, неустойчивым, безразличным. Устойчивость тел тем больше, чем больше площадь опоры и ниже центр тяжести.
III. Применение знаний об устойчивости тел.
- Каким специальностям наиболее необходимы знания о равновесии тел?
- Проектировщикам и конструкторам различных сооружений (высотных зданий, мостов, телевизионных башен и т.д.)
- Цирковым артистам.
- Водителям и другим специалистам.
(слайды 28–30)
- Почему «Ванька-встанька» возвращается в положение равновесия при любом наклоне игрушки?
- Почему Пизанская башня стоит под наклоном и не падает?
- Каким образом сохраняют равновесие велосипедисты и мотоциклисты?
Выводы из урока:
- Существует три вида равновесия: устойчивое, неустойчивое, безразличное.
- Устойчиво положение тела, в котором его потенциальная энергия минимальна.
- Устойчивость тел на плоской поверхности тем больше, чем больше площадь опоры и ниже центр тяжести.
Домашнее задание : § 54– 56 (Г.Я. Мякишев, Б.Б. Буховцев, Н.Н. Сотский)
Использованные источники и литература:
- Г.Я. Мякишев, Б.Б. Буховцев, Н.Н.Сотский. Физика. 10 класс.
- Диафильм «Устойчивость» 1976 г. (отсканирован мною на плёночном сканере).
- Диск «Движение и взаимодействие тел» из «Электронных уроков и тестов».
- Диск «Работа и мощность» из «Электронных уроков и тестов».
Вид равновесия твердого тела определяется по действию силы тяжести в случае сколь угодно малого отклонения: а) безразличное равновесие - действие силы тяжести не изменяется; б) устойчивое - оно всегда возвращает тело в прежнее положение (возникает момент устойчивости); в) неустойчивое - действие силы тяжести всегда вызывает опрокидывание тела (возникает момент опрокидывания); г) ограниченно-устойчивое - до потенциального барьера положение тела восстанавливается (возникает момент устойчивости), после него тело опрокидывается (возникает момент опрокидывания).
В механике твердого тела различают три вида равновесия: безразличное, устойчивое и неустойчивое . Эти виды различаются по поведению тела, незначительно отклоняемого от уравновешенного положения. Когда тело человека полностью сохраняет позу («отвердение»), к нему применимы законы равновесия твердого тела.
Безразличное равновесие характерно тем, что при любых отклонениях сохраняется равновесие. Шар, цилиндр, круговой конус на горизонтальной плоскости (нижняя опора) можно повернуть как угодно, и они останутся в покое. Линия действия силы тяжести (G) в таком теле (или, как говорят, короче линия тяжести) всегда проходит через точку опоры, совпадает с линией действия силы опорной реакции (R); они уравновешивают друг друга. В спортивной технике безразличного равновесия ни на суше, ни в воде практически не встречается.
Устойчивое равновесие характерно возвратом в прежнее положение при любом отклонении. Оно устойчиво при сколь угодно малом отклонении по двум причинам; а) центр тяжести тела поднимается выше (Dh), создается запас потенциальной энергии в поле земного тяготения; б) линия тяжести (G) не проходит через опору, появляется плечо силы тяжести (d) и возникает момент силы тяжести (момент устойчивости М уст=Gd), возвращающий тело (с уменьшением потенциальной энергии) в прежнее положение. Такое равновесие встречается у человека при верхней опоре. Например, гимнаст в висе на кольцах; рука, свободно висящая в плечевом суставе. Сила тяжести тела сама возвращает тело в прежнее положение.
Неустойчивое равновесие характерно тем, что сколь угодно малое отклонение вызывает еще большее отклонение и тело само в прежнее положение вернуться не может. Таково положение при нижней опоре , когда тело имеет точку или линию (ребро тела) опоры. При отклонении тела: а) центр тяжести опускается ниже (-Dh), убывает потенциальная энергия в поле земного тяготения; б) линия тяжести (G) с отклонением тела удаляется от точки опоры, увеличиваются плечо (d) и момент силы тяжести (момент опрокидывания М опр. =Gd ); он все дальше отклоняет тело от прежнего положения. Неустойчивое равновесие в природе практически почти не осуществимо.
В физических упражнениях чаще всего встречается еще один вид равновесия, когда имеется площадь опоры, расположенная внизу (нижняя опора). При незначительном отклонении тела центр его тяжести поднимается (+Dh) и появляется момент устойчивости (M уст =Gd). Налицо признаки устойчивого равновесия; момент силы тяжести тела вернет его в прежнее положение. Но это продолжается лишь при отклонении до определенных границ, пока линия тяжести не дойдет до края площади опоры. В этом положении уже возникают условия неустойчивого равновесия: при дальнейшем отклонении тело опрокидывается; при малейшем отклонении в обратную сторону - возвращается в прежнее положение. Границе площади опоры соответствует вершина «потенциального барьера» (максимум потенциальной энергии). В пределах между противоположными барьерами («потенциальная яма») во всех направлениях осуществляется ограниченно-устойчивое равновесие .
2.4. Устойчивость твердого тела и системы тел
Устойчивость объекта характеризуется его способностью, противодействуя нарушению равновесия, сохранять положение. Различают статические показатели устойчивости как способность сопротивляться нарушению равновесия и динамические как способность восстановить равновесие.
Статическим показателем устойчивости твердого тела служит (в ограниченно-устойчивом равновесии) коэффициент устойчивости . На рис. 51, а опрокидывающий момент создается опрокидывающей силой (F опр), приложенной на плече (h) относительно линии опрокидывания (О), вокруг которой происходит отклонение тела. Момент устойчивости относительно той же линии опрокидывания возникает с начала приложения силы F опр. Наибольшим он становится в начале опрокидывания (предельный момент устойчивости), далее плечо силы тяжести G уменьшается и момент устойчивости уменьшается до нуля (в граничном положении - ОЦТ над линией опрокидывания).
а - коэффициент устойчивости тела; б, в - угол устойчивости (a};г - статическая и динамическая устойчивость системы тел; д - поверхность опоры (пунктир) и площадь эффективной опоры (заштрихована) (ориг.)
Коэффициент устойчивости равен отношению предельного момента устойчивости к моменту опрокидывающему. Когда коэффициент устойчивости покоящегося тела равен единице и больше нее, опрокидывания нет. Если же он меньше единицы, равновесие не может быть сохранено.
Однако сопротивление только этих двух механических факторов (двух моментов сил) для системы тел, если она может изменять конфигурацию, не исчерпывает действительной картины. Предположим, что сопротивляющийся борец (рис. 51, г), согнув ноги, опустит строго вертикально центр тяжести своего тела. От этого ни сила тяжести его тела, ни ее плечо, а значит, и момент устойчивости не изменятся. Но понизится точка приложения F onp плечо этой силы уменьшится, меньше станет ее момент. Таким способом борец может увеличить коэффициент устойчивости своего тела путем уменьшения опрокидывающего момента. Отклонив назад тело, он не изменит опрокидывающий момент, но увеличит плечо силы тяжести своего тела и момент устойчивости. Здесь он тоже выиграет в статической устойчивости. Борец, напрягая мышцы и упираясь в ковер, создает еще внешнюю горизонтальную силу (силу трения), направленную в его сторону, уменьшая этим действие опрокидывающей тяги. Последнее зависит также от готовности мышц борца противодействовать внезапному ее приложению. Обманными действиями можно резко ухудшить их готовность и малой тягой вызвать опрокидывание. Самое существенное для биомеханической системы не в пассивном использовании силы тяжести тела, а в активных мышечных тягах, сохраняющих и изменяющих позу тела. В системе тел каждое звено должно быть в равновесии, сохраняя ее конфигурацию (позу тела человека).
Следовательно, коэффициент устойчивости тела и зафиксированной системы тел характеризует статическую устойчивость как способность сопротивляться нарушению равновесия. У человека при определении устойчивости всегда надо еще учитывать активное противодействие мышечных тяг и готовность к сопротивлению.
Динамическим показателем устойчивости твердого тела служит угол устойчивости . Это угол, образованный линией действия силы тяжести и прямой, соединяющей центр тяжести с соответствующим краем площади опоры (см. рис. 51, б, в). Станем отклонять тело, пока линия тяжести не дойдет до границы площади опоры (граничное положение тела - вершина потенциального барьера). У тела, поставленного стоймя (рис. 51, б), база устойчивости (/i) меньше, чем у того же тела, лежащего плашмя (/2) (см. рис. 51, в). Значит, линия тяжести ближе к границе, за которой начнется опрокидывание. Центр тяжести надо поднять для опрокидывания в первом случае на меньшую высоту (Dh 1), чем во втором (Dh 2) Угол устойчивости в первом случае (a 1) явно меньше, чем во втором (a 2).
Физический смысл угла устойчивости состоит в том, что он равен углу поворота (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Сумма двух углов устойчивости в одной плоскости рассматривается как угол равновесия в этой плоскости. Он характеризует запас устойчивости в данной плоскости, т. е. определяет размах перемещений центра тяжести до возможного опрокидывания в ту или другую сторону (например, у слаломиста при спуске на лыжах, гимнастки на бревне, борца в стойке).
В случае равновесия биомеханической системы дляприменения динамических показателей устойчивости нужно учесть существенные уточнения.
Во-первых, площадь эффективной опоры человека не всегда совпадает с поверхностью опоры. У человека, как и у твердого тела, поверхность опоры ограничена линиями, соединяющими крайние точки опоры (или внешние края нескольких площадей опоры) (см. рис. 51, д). Но у человека часто граница площади эффективной опоры расположена внутри контура опоры, так как мягкие ткани (стопа босиком) или слабые звенья (концевые фаланги пальцев в стойке на руках на полу) не могут уравновесить нагрузку. Поэтому линия опрокидывания смещается кнутри от края опорной поверхности, площадь эффективной опоры меньше площади опорной поверхности.
Во-вторых, человек никогда не отклоняется всем телом относительно линии опрокидывания (как кубик), а перемещается относительно осей каких-либо суставов, не сохраняя полностью позы (например, при положении стоя -движения в голеностопных суставах).
В-третьих, при приближении к граничному положению нередко становится трудно сохранить позу и наступает не просто опрокидывание «отвердевшего тела» вокруг линии опрокидывания, а изменение позы с падением. Это существенно отличается от отклонения и опрокидывания твердого тела вокруг грани опрокидывания (кантование).
Таким образом, углы устойчивости в ограниченно-устойчивом равновесии характеризуют динамическую устойчивость как способность восстановить равновесие. При определении устойчивости тела человека необходимо также учитывать границы площади эффективной опоры, надежность сохранения позы до граничного положения тела и реальную линию опрокидывания.
В физических упражнениях часто встречается удерживающая связь (жесткая). Тогда условия сохранения равновесия требуют учета двусторонней связи путем рассмотрения соответствующих реактивных сил, вызванных такой связью.
3.СОХРАНЕНИЕ И ВОССТАНОВЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА
Человек может не только сохранять равновесие, но и восстанавливать его в случаях нарушения. Отличие равновесия биомеханических систем от равновесия твердых физических тел заключается не в наличии особых законов механики для живых систем, а в более сложном их использовании благодаря особенностям живых систем.