«Физика - 10 класс»
Какими величинами можно описать механическое движение тела?

Существует несколько способов описания, или, что одно и то же, задания движения точки. Рассмотрим два из них, которые наиболее часто применяются.
Координатный способ.
Будем задавать положение точки с помощью координат. Если точка движется, то её координаты изменяются с течением времени. Так как координаты точки зависят от времени, то можно сказать, что они являются функциями времени.
Математически это принято записывать в виде
Уравнения (1.1) называют кинематическими уравнениями движения точки, записанными в координатной форме.
Если уравнения движения известны, то для каждого момента времени мы сможем рассчитать координаты точки, а следовательно, и её положение относительно выбранного тела отсчёта. Вид уравнений для каждого конкретного движения будет вполне определённым.
Основной задачей кинематики является определение уравнения движения тел.
Количество выбираемых для описания движения координат зависит от условий задачи. Если движение точки происходит вдоль прямой, то достаточно одной координаты и, следовательно, одного уравнения, например, x(t). Если движение происходит на плоскости, то его можно описать двумя уравнениями - x(t) и y(t). Уравнения описывают движение точки в пространстве.
Векторный способ.
Положение точки можно задать, и с помощью радиус-вектора.
Радиус-вектор - это направленный отрезок, проведённый из начала координат в данную точку.
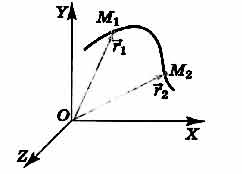
При движении материальной точки радиус-вектор, определяющий её положение, с течением времени изменяется (поворачивается и меняет длину), т. е. является функцией времени:
На рисунке радиус-вектор определяет положение точки в момент времени t 1 , а радиус-вектор 2 - в момент времени t 2 .
Вышеприведенная формула и есть уравнение движения точки, записанное в векторной форме.
Если оно известно, то мы можем для любого момента времени рассчитать радиус-вектор точки, а значит, определить её положение.
Задание трёх скалярных уравнений равносильно заданию одного векторного уравнения.

Итак, мы знаем, что положение точки в пространстве определяется её координатами или её радиус-вектором.
Модуль и направление любого вектора находят по его проекциям на оси координат. Чтобы понять, как это делается, вначале необходимо ответить на вопрос: что понимают под проекцией вектора на ось?
Изобразим ось ОХ. Опустим из начала А и конца В вектора перпендикуляры на ось ОХ. Точки А 1 и В 1 есть проекции соответственно начала и конца вектора на эту ось.
Проекция вектора
Проекцией вектора на какую-либо ось называется длина отрезка А 1 В 1 между проекциями начала и конца вектора на эту ось, взятая со знаком «+» или «-».
Проекцию вектора мы будем обозначать той же буквой, что и вектор, но, во-первых, без стрелки над ней и, во-вторых, с индексом внизу, указывающим, на какую ось проецируется вектор. Так, а х и а у - проекции вектора на оси координат ОХ и OY.
Урок № 3 10 класс Дата_________
Тема урока. Механическое движение и его виды . Способы описания движения тел .
Цель: ввести понятие механического движения, ознакомить учеников с основными понятиями, которые характеризуют механическое движение, дать представление об относительности механического движения.
Тип урока: комбинированный урок.
Оборудование и наглядные пособия: тележка, маятник, фотографии траектории движения самолета, следов на снегу и т. п.
Демонстрации: демонстрации движения разных тел, исследования относительности движения, компьютерное моделирование (движение материальной точки), фотографии траектории движения самолета, следов на снеге и т. п.
ХОД УРОКА
I . Организационный этап
II. Актуализация опорных знаний и умений
Приведите примеры тел, которые двигаются, и неподвижных тел.
Чем тела, которые двигаются, отличаются от тел неподвижных?
III. Изучение нового материала
План изучения новой темы
Определение механики.
Механическое движение.
Виды движения.
Основная задача механики.
Относительность механического движения.
Тело отсчета.
Системы координат.
Система отсчета.
Векторные и скалярные величины.
Траектория.
Путь.
Перемещение.
Материальная точка.
Механика - часть физики, которая изучает закономерности механического движения и причины , вызывающие или изменяющие это движение.
Механическое движение - это изменение в пространстве с течением времени взаимного расположения тел или их частей.
Основная задача механики – определить положение тела в любой момент времени.
Механическое движение относительно. Движение одного и того же тела относительно разных тел оказывается различным. Для описания движения тела нужно указать, по отношению к какому телу рассматривается движение. Это тело называют телом отсчёта . Оно считается неподвижным (для данной задачи).
Положение тела в пространстве описывается с помощью системы координат. Реальное пространство трёхмерно, и положение материальной точки в любой момент времени полностью определяется тремя числами - её координатами в выбранной системе отсчета.
Как правило, используют прямоугольную, или декартову, систему координат. Для описания движения точки, кроме тела отсчёта и системы координат, необходимо ещё иметь часы – устройство, с помощью которого можно измерять различные отрезки времени.
Положение материальной точки в пространстве в произвольный момент времени можно определить, если ввести систему отсчета .
Тело отсчёта, система координат и связанные с ней часы образуют систему отсчета.
 -
.
-
.
Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей моделью является материальная точка - тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Понятие материальной точки - абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные точки.
Физическая величина – это характеристика, которая является общей для нескольких материальных объектов или явлений в качественном отношении, но может принимать индивидуальные значения для каждого из них.
В кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси. Рис. 1 Рис. 2 1. Векторный способ. В этом способе положение материальной точки А задаётся с помощью так называемого радиус-вектора г, который представляет совой вектор, проведённый из точки О, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку А (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени г = r(t). Геометрическое место концов радиус-вектора г (t) называют траекторией точки А. В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка А после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки. Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени At тело (точка А) переместилось из начального положения 1 с радиус-вектором Т\ в конечное положение 2 с радиус-вектором Т\ (рис. 2). Приращение А г радиус-вектора тела в таком случае равно: Вектор Аг, соединяющий начальное и конечное положения тела, называют перемещением тела. Отношение Аг/At называют средней скоростью (средним вектором скорости) vcp тела за время At: Способы описания движения. Векторный способ. Координатный способ. Естественный (или траекторный) способ Вектор vcp колли неарен и сонаправлен с вектором Аг, так как отличается от последнего лишь скалярным неотрицательным множителем 1 / Аг. Предложенное определение средней скорости справедливо для любых значений At, кроме Д/ = 0. Однако ничто не мешает брать промежуток времени At сколь угодно малым, но отличным от нуля. Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени t или в конкретной точке траектории. С этой целью промежуток времени At устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение Аг. При этом отношение А/ / At стремится к определённому значению, не зависящему от At. Величина, к которой стремится отношение Аг / At при стремлении At к нулю, называется мгновенной скоростью v: Теперь заметим, что чем меньше At, тем ближе направление Аг к направлению касательной к траектории в данной точке. Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела. В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости v тела (материальной точки). Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения. Его определяют через отношение приращения вектора скорости Av тела к промежутку времени А/, в течение которого это приращение произошло. Ускорением а тела называется величина, к которой стремится отношение Av / At при стремлении к нулю знаменателя At: При уменьшении At ориентация вектора Av будет приближаться к определённому направлению, которое принимается за направление вектора ускорения а. Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости! Способы описания движения. Векторный способ. Координатный способ. Естественный (или траекторный) способ Таким образом, зная зависимость г(/), можно найти скорость v и ускорение а тела в каждый момент времени. В этой связи возникает и обратная задача о нахождении скорости v(t) и радиус-вектора r(t) по известной зависимости от времени ускорения а. Для однозначного решения этой задачи необходимо знать начальные условия, т. е. скорость v0 и радиус-вектор г0 тела в начальный момент времени / = 0. Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (м/с) и метр на секунду в квадрате (м/с2 2. Координатный способ. В этом способе положение материальной точки А на плоскости в произвольный момент времени t определяется двумя координатами хну, которые представляют собой проекции радиус-вектора г тела на оси Ох и Оу соответственно (рис. 3). При движении тела его координаты изменяются со временем, т. е. являются функциями V= y(t). Если эти функции известны, то они определяют положение тела на плоскости в любой момент времени. В свою очередь, вектор скорости v можно спроецировать на оси координат и определить таким образом скорости i\ и v.. изменения координат тела (рис. 4). В самом деле, vx и vy будут равны значениям, к которым стремятся соответственно отношения Ах/А t и Ay/At при стремлении к нулю промежутка времени At. Аналогично с помощью проецирования вектора а определяются ускорения ах и ах тела по направлениям координатных осей. Таким образом, зная зависимости л(/) и >>(/), можно найти не только положение тела, но и проекции его скорости и ускорения, а следовательно, модуль и направление векторов v и а в любой момент времени. Например, модуль вектора скорости будет равен v=yjvx2+vv2 , а его направление может быть задано углом между этим вектором и любой осью координат. Так, угол а между вектором v и осью Ох определяется отношением tga = vy!vx. Аналогичными формулами определяются модуль и направление вектора а. Обратная задача - нахождение скорости и зависимостей x(t) и y(t) по заданному ускорению - будет иметь однозначное решение, если кроме ускорения заданы ещё и начальные условия: проекции скорости и координаты точки в начальный момент времени t = 0. 3. Естественный (или траекторный) сносов. Этот способ применяют тогда, когда траектория материальной точки известна заранее. На заданной траектории LM (рис. 5) выбирают начало отсчёта - неподвижную точку О, а положение движущейся материальной точки А определяют при помощи так называемой дуговой координаты /, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта О до точки А. При этом положительное направление отсчёта координаты / выбирают произвольно, по соображениям удобства, например так, как рис ^ показано стрелкой на рисунке 5. Движение тела определено, если известны его траектория, начало отсчёта О, положительное направление отсчёта дуговой координаты I и зависимость l(t). Следующие два важных механических понятия - это пройденный путь и средняя путевая скорость. По определению, путь AS - это длина участка траектории, пройденного телом за промежуток времени At. Ясно, что пройденный путь - величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением А г, представляющем собой вектор. Сравнивать можно только путь AS и модуль перемещения \Аг. Очевидно, что AS > |Аг|. Средней путевой скоростью г>ср тела называют отношение пути AS к промежутку времени At, в течение которого этот путь был пройден: Определённая ранее средняя скорость vc? (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как Аг отличается от AS, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения At. Само слово «средняя» означает усреднение по времени. Пример 1. Городской троллейбус утром вышел на маршрут, а через 8 часов, проехав в общей сложности 72 км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость vcp и средняя путевая скорость г>ср троллейбуса? Способы описания движения. Векторный способ. Координатный способ. Естественный (или траекторный) способ Решение. Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение А г равно нулю Аг = 0, следовательно, = 0 . Но средняя путевая скорость троллейбуса не vcp=Ar/At = 0 и рср равна нулю.