Hệ lực đó gọi là cân bằng, nếu dưới tác động của hệ thống này, cơ thể vẫn ở trạng thái nghỉ ngơi.
Điều kiện cân bằng:
Điều kiện đầu tiên để vật rắn cân bằng:
Để một vật rắn ở trạng thái cân bằng thì tổng các ngoại lực tác dụng lên vật phải bằng 0.
Điều kiện thứ hai để vật rắn cân bằng:
Khi một vật rắn ở trạng thái cân bằng thì tổng mô men của tất cả các ngoại lực tác dụng lên nó so với trục bất kỳ đều bằng 0.
Điều kiện chung để vật rắn cân bằng:
Để một vật rắn ở trạng thái cân bằng thì tổng các ngoại lực và tổng mô men của các lực tác dụng lên vật phải bằng không. Vận tốc ban đầu của khối tâm và vận tốc góc quay của vật cũng phải bằng 0.
Định lý. Ba lực cân bằng trong một vật rắn chỉ khi chúng cùng nằm trong một mặt phẳng.
11. Hệ lực phẳng– đây là những lực nằm trong một mặt phẳng.
Ba dạng phương trình cân bằng của hệ phẳng:
Trọng tâm của cơ thể.
Trọng tâm Một vật có kích thước hữu hạn được gọi là điểm mà tổng mô men hấp dẫn của tất cả các hạt trong vật đó bằng 0. Lúc này lực hấp dẫn của cơ thể được tác dụng. Trọng tâm của một vật (hoặc hệ lực) thường trùng với trọng tâm của vật (hoặc hệ lực).
Trọng tâm của hình phẳng:
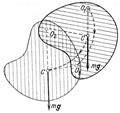
Một phương pháp thực tế để tìm khối tâm của hình phẳng: treo vật thể trong trường trọng lực để nó có thể xoay tự do xung quanh điểm treo O1 . Ở trạng thái cân bằng khối tâm VỚI nằm trên cùng một phương thẳng đứng với điểm treo (bên dưới nó), vì nó bằng 0
mômen trọng lực, có thể coi là áp dụng tại tâm khối lượng. Bằng cách thay đổi điểm treo ta tìm được một đường thẳng khác tương tự O 2 C , đi qua khối tâm. Vị trí của khối tâm được cho bởi điểm giao nhau của chúng.
Tâm vận tốc khối lượng:
Động lượng của một hệ hạt bằng tích khối lượng của toàn hệ M= Σmi về tốc độ khối tâm của nó V. :
![]()
Khối tâm đặc trưng cho chuyển động của toàn bộ hệ thống.
15. Lực ma sát trượt- ma sát trong chuyển động tương đối của các vật tiếp xúc.
Ma sát tĩnh- ma sát khi không có chuyển động tương đối của các vật tiếp xúc.
Lực ma sát trượt ftr giữa các bề mặt của các vật tiếp xúc trong quá trình chuyển động tương đối của chúng phụ thuộc vào lực phản lực pháp tuyến N , hoặc từ lực áp suất bình thường Pn , Và Ftr=kN hoặc Ftr=kPn , ở đâu k - hệ số ma sát trượt , tùy thuộc vào các hệ số tương tự như hệ số ma sát tĩnh k0 , cũng như tốc độ chuyển động tương đối của các vật tiếp xúc.
16. Ma sát lăn- Đây là sự lăn của cơ thể này lên cơ thể khác. Lực ma sát trượt không phụ thuộc vào kích thước của các bề mặt cọ xát mà chỉ phụ thuộc vào chất lượng bề mặt của các vật cọ xát và vào lực làm giảm các bề mặt cọ xát và có phương vuông góc với chúng. F=kN, Ở đâu F- lực ma sát, N– độ lớn của phản ứng bình thường và k – hệ số ma sát trượt.
17. Sự cân bằng của các vật khi có ma sát- đây là lực bám dính tối đa tỷ lệ với áp suất bình thường của cơ thể trên mặt phẳng.
Góc giữa phản lực toàn phần, dựa trên lực ma sát lớn nhất đối với một phản lực pháp tuyến nhất định, và hướng của phản lực pháp tuyến được gọi là góc ma sát.
Một hình nón có đỉnh tại điểm tác dụng phản lực pháp tuyến của một bề mặt gồ ghề, mà đường sinh của nó tạo một góc ma sát với phản lực pháp tuyến này, được gọi là nón ma sát.
Động lực học.
1. TRONG động lực họcảnh hưởng của sự tương tác giữa các vật thể lên chuyển động cơ học của chúng được xem xét.
Cân nặng- đây là đặc điểm hội họa của một điểm vật chất. Khối lượng không đổi. Khối lượng là tính từ (phụ gia)
Sức mạnh -đây là một vectơ mô tả hoàn toàn sự tương tác của một điểm vật chất trên đó với các điểm vật chất khác.
Điểm vật chất– một vật có kích thước và hình dạng không quan trọng trong chuyển động đang xét (ví dụ: trong chuyển động tịnh tiến, một vật rắn có thể được coi là một điểm vật chất).
Hệ thống vật liệu dấu chấm được gọi là một tập hợp các điểm vật chất tương tác với nhau.
Định luật 1 Newton: bất kỳ điểm vật chất nào cũng duy trì trạng thái đứng yên hoặc chuyển động thẳng đều cho đến khi các tác động bên ngoài làm thay đổi trạng thái này.
Định luật II Newton: gia tốc thu được bởi một điểm vật chất trong hệ quy chiếu quán tính tỷ lệ thuận với lực tác dụng lên điểm, tỷ lệ nghịch với khối lượng của điểm và trùng phương với lực: a=F/m
Định luật thứ 3 của Newton: lực tương tác giữa hai điểm vật chất trong hệ quy chiếu quán tính có độ lớn bằng nhau và hướng ngược nhau : Fik= - Fki
Bạn có biết Đâu là sự sai lầm của khái niệm “chân không vật lý”?
Chân không vật lý - khái niệm vật lý lượng tử tương đối tính, theo đó chúng có nghĩa là trạng thái năng lượng (mặt đất) thấp nhất của trường lượng tử hóa, có động lượng bằng 0, động lượng góc và các số lượng tử khác. Các nhà lý thuyết tương đối tính gọi chân không vật lý là một không gian hoàn toàn không có vật chất, chứa đầy một trường không thể đo lường được và do đó chỉ là trường tưởng tượng. Trạng thái này, theo những người theo thuyết tương đối, không phải là một khoảng trống tuyệt đối mà là một không gian chứa đầy một số hạt ảo (ảo). Lý thuyết trường lượng tử tương đối tính phát biểu rằng, theo nguyên lý bất định Heisenberg, ảo, nghĩa là biểu kiến (rõ ràng với ai?), các hạt liên tục sinh ra và biến mất trong chân không vật lý: cái gọi là dao động trường điểm 0 xảy ra. Các hạt ảo của chân không vật lý, và do đó, theo định nghĩa, bản thân nó không có hệ quy chiếu, vì nếu không thì nguyên lý tương đối của Einstein, cơ sở của thuyết tương đối, sẽ bị vi phạm (nghĩa là một hệ thống đo lường tuyệt đối có tham chiếu). các hạt của chân không vật lý sẽ trở nên khả thi, do đó sẽ bác bỏ rõ ràng nguyên lý tương đối mà SRT dựa vào). Như vậy, chân không vật lý và các hạt của nó không phải là các phần tử của thế giới vật chất mà chỉ là các phần tử của thuyết tương đối, không tồn tại trong thế giới thực mà chỉ tồn tại trong các công thức tương đối, vi phạm nguyên lý nhân quả (chúng xuất hiện và biến mất không nguyên nhân), nguyên lý khách quan (các hạt ảo có thể được xem xét, tùy theo mong muốn của nhà lý thuyết, tồn tại hoặc không tồn tại), nguyên tắc đo lường thực tế (không quan sát được, không có ISO riêng).
Khi một nhà vật lý này hay nhà vật lý khác sử dụng khái niệm “chân không vật lý”, thì anh ta hoặc là không hiểu sự vô lý của thuật ngữ này, hoặc là không thành thật, là một người công khai hoặc giấu kín tuân theo hệ tư tưởng tương đối.
Cách dễ nhất để hiểu sự vô lý của khái niệm này là quay lại nguồn gốc xuất hiện của nó. Nó được Paul Dirac khai sinh vào những năm 1930, khi người ta thấy rõ rằng việc phủ nhận ether ở dạng nguyên chất của nó, như đã được thực hiện bởi một nhà toán học vĩ đại nhưng là một nhà vật lý tầm thường, là không thể được nữa. Có quá nhiều sự thật mâu thuẫn với điều này.
Để bảo vệ thuyết tương đối, Paul Dirac đã đưa ra khái niệm phi vật lý và phi logic về năng lượng âm, sau đó là sự tồn tại của một “biển” gồm hai năng lượng bù trừ cho nhau trong chân không - dương và âm, cũng như một “biển” các hạt bù trừ cho nhau. khác - các electron và positron ảo (nghĩa là rõ ràng) trong chân không.
Trong tĩnh học, cũng như trong động học (điểm 51), vật rắn là một hệ thống các điểm vật chất luôn được kết nối với nhau. Do đó, hệ thống này là một vật thể hoàn toàn cứng nhắc, các điểm của nó luôn cách nhau một khoảng không đổi, bất chấp các lực tác dụng lên các điểm này và bất kể chuyển động của vật thể đó là gì.
Tất nhiên, cơ thể được định nghĩa theo cách này là một sự lý tưởng hóa. Trước hết, vật lý dạy chúng ta rằng chất rắn bao gồm các phân tử, bản thân chúng có cấu trúc rất phức tạp và có thể có nhiều chuyển động ẩn giấu khác nhau. Về các phân tử được đưa vào vị trí trung bình của chúng, chúng ta có thể nói rằng chúng vẫn giữ nguyên, với mức độ gần đúng cao, ở cùng một vị trí.
cùng khoảng cách với nhau. Vì vậy, ở đây chúng ta chỉ có thể coi các phân tử ở vị trí trung bình của chúng là điểm vật chất. Nhưng đó không phải là tất cả; ngay cả khi chúng ta bỏ qua những chuyển động ẩn giấu của phân tử và chỉ chú ý đến những chuyển động nhìn thấy được của các hạt, thì ngay cả khi đó mọi vật thể trong tự nhiên cũng thay đổi hình dạng dưới tác động của các lực tác dụng lên chúng; như chúng ta đã biết (điểm 109), nội lực tác dụng giữa các hạt của cùng một vật phụ thuộc vào những biến dạng này. Tuy nhiên, vì sự biến dạng của các vật thể gọi là “chất rắn” trong vật lý là rất nhỏ nên chúng có thể bị bỏ qua như một phép tính gần đúng thứ nhất, trừ khi các lực tác dụng lên các vật thể đó quá lớn và trừ khi chúng ta đang nghiên cứu nội lực. Xác định nội lực và các biến dạng nhìn thấy được xảy ra trong chất rắn là một nhiệm vụ khó khăn không còn liên quan đến tĩnh học mà liên quan đến lý thuyết đàn hồi. Lý thuyết mà chúng tôi sẽ trình bày có thể áp dụng cho các vật thể rắn với độ chính xác cao hơn, chúng càng gần với một vật thể rắn tuyệt đối.
Từ quan điểm logic, trạng thái tĩnh hình học của một vật rắn nên được coi là một lý thuyết giới hạn. Nó đặt ra một số định luật chung nhất định áp dụng cho mọi chất rắn, bất kể cấu trúc phân tử và tính chất đàn hồi của chúng, miễn là các biến dạng có thể được coi là vô cùng nhỏ. Tuy nhiên, lý thuyết được xây dựng theo cách này là một lý thuyết không đầy đủ về trạng thái cân bằng, vì nó loại bỏ một cách có hệ thống các tính chất đàn hồi, việc đưa chúng vào trong một số trường hợp trở nên tuyệt đối cần thiết. Trong những trường hợp này, các phương pháp tĩnh học hình học hóa ra không đủ để giải quyết tất cả các câu hỏi mà bài toán cân bằng có thể đặt ra cho chúng ta. Một số câu hỏi này thậm chí có thể trở nên mâu thuẫn nếu chúng ta giữ lại giả thuyết về tính bất biến tuyệt đối của một vật rắn.
Chỉ riêng điều kiện không biến dạng là không đủ để biện minh cho lý thuyết cân bằng của chất rắn;
Để bổ sung cho điều này, như một phần bổ sung cho định nghĩa về vật rắn, định đề cơ học sau đây:
Định đề. - Không làm thay đổi bất cứ điều gì ở điều kiện cân bằng của một vật rắn, bạn có thể cộng hoặc loại bỏ hai lực bằng nhau và ngược chiều tác dụng lên hai điểm của nó.
Định đề này có thể bắt nguồn từ một nguyên tắc chung được gọi là nguyên tắc chuyển động ảo, nhưng hiện tại chúng ta sẽ không làm điều này. Chúng ta sẽ thiết lập nguyên tắc được đề cập ở một trong các chương sau làm cơ sở cho thống kê phân tích. Sẽ là vô ích khi giới thiệu định đề này nếu chúng ta chấp nhận các định luật động lực cơ bản như chúng ta đã trình bày ở phần trước của khóa học, vì định đề được đề cập, như chúng ta sẽ thấy sau, là một trường hợp đặc biệt đơn giản của một định đề tổng quát. định lý động lực học của vật rắn. Nếu chúng tôi giới thiệu nó ở đây, chúng tôi làm như vậy với mục đích bảo tồn đặc tính của một bộ môn độc lập đằng sau tĩnh học. Chúng ta sẽ xem định đề này, từ quan điểm vật lý, như một hệ quả trực tiếp của kinh nghiệm; từ quan điểm của cơ học lý thuyết, chúng tôi sẽ coi nó như một sự bổ sung cho định nghĩa về vật rắn được áp dụng trong tĩnh học, đồng thời nhận được lợi ích là chúng tôi không phải đưa ra giả thuyết phân tử.
Như đã lưu ý trong lý thuyết về vectơ (điểm 28), định đề cơ bản này dẫn đến mệnh đề sau:
Không vi phạm các điều kiện cân bằng của một vật rắn, người ta có thể di chuyển điểm tác dụng của lực đến một điểm tùy ý trên đường tác dụng của nó, miễn là điểm mới này được nối với vật.
Không cần phải nói rằng câu này chỉ nói về trạng thái cân bằng của cơ thể chứ không nói về những hành động mà các điểm khác nhau của cơ thể tác động lên nhau, vì những hành động bên trong này tất nhiên sẽ thay đổi khi điểm áp dụng của lực chỉ ra sự thay đổi
Ví dụ, thao tác có thể được thực hiện khi một vật cứng được đặt trên một số giá đỡ, nhưng trong mọi trường hợp không thể nói rằng việc truyền lực trong trường hợp này sẽ không làm thay đổi phản lực của các giá đỡ. Do đó, sẽ là một sai lầm lớn khi áp dụng nguyên lý truyền lực khi xác định phản lực của các điểm tựa, chẳng hạn như truyền lực này hoặc lực khác tác dụng đến điểm tựa. Điều kiện duy nhất có thể được áp dụng hợp pháp trong trường hợp này là các điều kiện cân bằng tổng quát, vì các điều kiện sau luôn là điều kiện cần.
185. Sự giảm lực tác dụng lên một vật rắn (góc nhìn tĩnh).
Chúng ta vừa thấy rằng có thể, mà không làm ảnh hưởng đến trạng thái cân bằng của một vật rắn, thực hiện các phép tính sau đây lên các lực tác dụng lên các điểm của vật rắn:
1°. Việc bổ sung hoặc mở rộng lực tác dụng tại một điểm.
2°. Cộng hoặc trừ hai lực bằng nhau và ngược chiều nhau.
3°. Sự truyền lực đến một điểm tùy ý trên đường tác dụng của nó.
Những phép toán này, như đã được thiết lập trong lý thuyết về vectơ (điểm 29), chính xác là những phép toán cơ bản giúp đưa hai hệ vectơ tương đương với nhau. Từ đó ta thu được định lý sau:
Không làm xáo trộn trạng thái cân bằng của một vật rắn, có thể thay thế bất kỳ hệ lực nào tác dụng lên vật bằng một hệ lực khác, đó là một hệ vectơ tương đương với hệ vectơ thứ nhất.
Hai hệ lực như vậy gọi là tương đương.
Do đó, nhiệm vụ đưa một hệ lực tác dụng lên một vật rắn trùng hợp với nhiệm vụ đưa một hệ vectơ nên ta có thể rút ra kết luận sau:
1°. Giảm xuống còn hai lực. Hệ lực tác dụng lên vật rắn có thể biểu diễn dưới dạng
mất cân bằng, chỉ với hai lực, một trong số đó tác dụng tại một điểm được chọn tùy ý của vật (mục 26).
2°. Mang lại sức mạnh và sự kết đôi. Một hệ lực tác dụng lên một vật rắn có thể quy về một lực tác dụng tại một điểm O tùy ý của vật rắn mà không làm xáo trộn trạng thái cân bằng, thành một lực tác dụng tại một điểm O tùy ý của vật và một cặp lực. Lực là hợp lực R của tất cả các lực của hệ truyền đến điểm O (vectơ chính), và mô men của cặp bằng mômen chính O của hệ lực đối với cùng một điểm (mục 24).
Để một hệ lực quy về một hợp lực R, điều cần và đủ là đối với một tâm quy nạp O được lấy tùy ý thì tổng hình học R khác 0 và mô men thu được là G (nếu nó khác 0) vuông góc với R. Hợp lực trong trường hợp này hướng dọc theo trục trung tâm của hệ.
Để hệ thống giảm xuống còn một cặp, điều cần và đủ là vectơ chính R bằng 0 và mô men chính O phải khác 0. Trong trường hợp này, mômen chính của hệ đối với mỗi điểm trong không gian là như nhau.
Cuối cùng, nếu các vectơ R và G đều bằng 0 thì hệ tương đương với 0 và vật sẽ ở trạng thái cân bằng. Chúng ta sẽ xem xét trường hợp này trong đoạn tiếp theo.
Lực trong một mặt phẳng. - Khi tất cả các lực tác dụng trong một mặt phẳng và tổng hình học của R của chúng không bằng 0 thì mô men G (cũng như mômen của mỗi lực) vuông góc với R. Do đó, các lực này giảm xuống còn một hợp lực R tác dụng tại một điểm trên trục trung tâm (rõ ràng nằm trong mặt phẳng tác dụng của các lực). Nếu R bằng 0 thì hệ thống giảm xuống còn một cặp và nếu G bằng 0 thì hệ thống ở trạng thái cân bằng.
Thật hữu ích khi lưu ý rằng bất kỳ hệ lực trên mặt phẳng nào cũng luôn có thể được quy về hai lực, adj. biểu diễn tại hai điểm A và mặt phẳng cho trước,
Trên thực tế, mỗi lực t tác dụng tại điểm O, nằm ngoài đường AB, bị phân hủy, theo hướng OA và OB, thành hai thành phần có thể truyền đến các điểm A và B. Nếu điểm O của lực tác dụng nằm trên AB, và đường tác dụng của lực đi qua A thì điểm tác dụng của lực có thể được chuyển tới nếu đường tác dụng của lực không đi qua A thì điểm tác dụng của lực; có thể được truyền dọc theo đường tác dụng ngoài đường AB, dẫn đến trường hợp đầu tiên.
Lực lượng song song. - Nếu các lực song song và tổng hình học R của chúng không bằng 0 thì mômen sinh ra G vuông góc với R, và do đó, các lực này giảm xuống một hợp lực R tác dụng lên một điểm trên trục trung tâm (song song). theo hướng chung của các lực). Nếu R bằng 0 thì hệ giảm xuống còn một cặp hoặc ở trạng thái cân bằng (khi mô men của cặp bằng 0).
186. Sự cân bằng của một vật rắn.
Để một vật rắn tự do ở trạng thái cân bằng, điều cần và đủ là hệ lực tác dụng lên nó (tức là trong trường hợp này là ngoại lực) phải tương đương với 0.
Chúng ta đã biết rằng điều kiện này là cần thiết vì nó thể hiện điều kiện cân bằng tổng quát.
Đối với một cơ thể rắn chắc thì điều đó cũng là đủ. Trên thực tế, nếu một hệ lực tương đương với 0, thì nó có thể bị giảm về 0 bằng các phép toán cơ bản và do đó, tất cả các lực tạo nên nó có thể bị loại bỏ một cách đơn giản. Dựa vào đó ta có hai điều kiện cân bằng ở dạng vector
Những điều kiện này được chia thành sáu phương trình đại số. Gọi X, Y, Z là hình chiếu của vectơ R lên ba trục tọa độ hình chữ nhật hoặc tổng các hình chiếu của tất cả các lực lên cùng một trục; hãy để thêm L, M,
Mômen kết quả của hệ các lực này đối với cùng một trục; thì sáu phương trình này sẽ là:
Người ta thường nói rằng ba phương trình đầu tiên (tương đương với đẳng thức R = 0) biểu thị các điều kiện cân bằng cho chuyển động tịnh tiến, và ba phương trình cuối cùng (tương đương với đẳng thức G = 0) biểu thị các điều kiện cân bằng cho chuyển động quay. Chúng ta sẽ có được cơ sở cho những cái tên như vậy sau này, khi chúng ta áp dụng nguyên lý công ảo để giải cùng một bài toán.
187. Sự giảm lực tác dụng lên một vật rắn (quan điểm động). Cân bằng động.
Trong động lực học của một vật rắn, chúng ta sẽ chỉ ra rằng trong trường hợp một vật rắn tự do, chuyển động của nó sẽ được xác định hoàn toàn nếu trong mỗi thời điểm vectơ chính và mômen chính đối với một điểm nào đó của tất cả các lực tác dụng lên nó được đưa ra. Do đó ta có định lý sau:
Nếu hai hệ lực tác dụng lên một vật rắn luôn tương đương với nhau theo quan điểm của lý thuyết vectơ thì chúng sẽ tương đương theo quan điểm chuyển động của vật đó.
Định lý này về cơ bản liên quan đến động lực học, nhưng nó cũng liên quan chặt chẽ đến tĩnh học hình học. Thật vậy, nó có thể được chứng minh bằng cách khái quát hóa rất đơn giản định đề chính, làm rõ định nghĩa về vật rắn trong tĩnh học (điểm 184).
Trên thực tế, chúng ta hãy thay thế định đề này bằng định đề sau:
Không làm thay đổi bất cứ điều gì ở trạng thái đứng yên hoặc chuyển động của một vật rắn, người ta có thể cộng hoặc trừ hai lực bằng nhau và ngược chiều tác dụng lên hai điểm của vật rắn.
Định đề tổng quát hơn này, cũng có thể được xác nhận trực tiếp bằng kinh nghiệm, cho phép chúng ta đưa ra những điều sau đây:
sự khái quát hóa tương tự đối với khái niệm quy ước và tương đương của các lực. Trên thực tế, trong tất cả các câu của đoạn 185 đều có thể thay thế từ “không làm xáo trộn sự cân bằng” bằng từ “không làm thay đổi bất cứ điều gì trong trạng thái nghỉ ngơi hoặc chuyển động của cơ thể”. Khi đó kết luận của đoạn 185 hóa ra tương đương với nguyên lý động được trình bày ở đây.
Chúng ta hãy lưu ý một hệ quả đặc biệt:
Nếu một vật rắn, dưới tác dụng của hệ lực S, vẫn ở trạng thái cân bằng thì hệ lực này (tương đương với 0) không thể làm thay đổi bất cứ điều gì ở trạng thái chuyển động của vật, nếu vật đó không còn đứng yên .
Bây giờ việc thiết lập định nghĩa sau là điều khá tự nhiên:
Một hệ lực nhất định ở trạng thái cân bằng theo quan điểm động lực học, hoặc ở trạng thái cân bằng động nếu các lực không thể làm thay đổi trạng thái đứng yên hoặc chuyển động của vật rắn mà chúng tác dụng vào.
Có được định nghĩa này, chúng ta có thể đưa ra đề xuất sau:
Để các lực tác dụng lên một vật rắn ở trạng thái cân bằng động, điều cần và đủ là chúng biểu diễn một hệ vectơ tương đương với 0.
Cách biểu diễn sự cân bằng của các lực tác dụng lên một vật rắn rất phổ biến, và từ “cân bằng” thường được sử dụng theo nghĩa này. Tuy nhiên, người ta không nên bỏ qua thực tế rằng ý tưởng về trạng thái cân bằng này đề cập nhiều đến động lực học hơn là tĩnh học.
188. Trọng tâm của một vật rắn.
Đặc biệt, việc giảm lực tác dụng lên một vật rắn có thể được thực hiện đối với lực trọng lượng của tất cả các điểm vật chất cấu thành nên vật đó. Tất cả các lực này đại diện cho các lực song song, định hướng như nhau. Do đó, hệ vectơ này được rút gọn thành một kết quả, bằng tổng trọng lượng P của vật rắn và được áp dụng vào tâm của các vectơ song song này,
chúng ta sẽ ký hiệu G. Điểm này, vị trí của nó trong vật thể không phụ thuộc vào hướng của nó so với bề mặt Trái đất, là trọng tâm của vật thể. Chúng ta sẽ xem trong chương tiếp theo cách xác định tọa độ của nó. Từ các định lý trước đó, suy ra rằng tác dụng của trọng lực lên các điểm khác nhau của một vật rắn, cả theo quan điểm tĩnh và động, được quy về một lực duy nhất, bằng tổng trọng lượng tác dụng lên trọng tâm của vật đó.