Система сил зв. врівноваженою,якщо під впливом цієї системи тіло залишається у спокої.
Умови рівноваги:
Перша умова рівноваги твердого тіла:
Для рівноваги твердого тіла необхідно, щоб сума зовнішніх сил, прикладених до тіла, дорівнювала нулю.
Друга умова рівноваги твердого тіла:
При рівновазі твердого тіла сума моментів всіх зовнішніх сил, які діють нього щодо будь-якої осі, дорівнює нулю.
Загальна умова рівноваги твердого тіла:
Для рівноваги твердого тіла повинні дорівнювати нулю сума зовнішніх сил та сума моментів сил, що діють на тіло. Повинні бути рівними нулю початкова швидкість центру мас і кутова швидкість обертання тіла.
Теорема.Три сили врівноважують тверде тіло лише в тому випадку, коли вони лежать в одній площині.
11. Плоска система сил- Це сили, розташовані в одній площині.
Три форми рівнянь рівноваги для плоскої системи:
Центр тяжкості тіла.
Центром тяжкостіТіла кінцевих розмірів називається точка, щодо якої сума моментів сил тяжіння всіх частинок тіла дорівнює нулю. У цій точці прикладена сила тяжкості тіла. Центр тяжкості тіла (або системи сил) зазвичай збігається із центром мас тіла (або системи сил).
Центр тяжкості плоскої фігури:
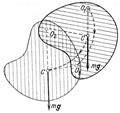
Практичний спосіб знаходження центру мас плоскої фігури: підвісимо тіло в полі тяжіння так, щоб воно могло вільно повертатися навколо точки підвісу O1 . У рівновазі центр мас З знаходиться на одній вертикалі з точкою підвісу (нижче за неї), так як дорівнює нулю
момент сили тяжкості, яку можна вважати прикладеною в центрі мас. Змінюючи точку підвісу, у такий же спосіб знаходимо ще одну пряму Про 2 С , проходить через центр мас. Положення центру мас дається точкою їх перетину.
Швидкість центру мас:
Імпульс системи частинок дорівнює добутку маси всієї системи М= Σmi на швидкість її центру мас V :
![]()
Центр мас характеризує рух системи як цілого.
15. Тертя ковзання– тертя при відносному русі дотичних тіл.
Тертя спокою– тертя за відсутності відносного переміщення тіл, що стикаються.
Сила тертя ковзання Fтр між поверхнями дотичних тіл при їх відносному русі залежить від сили нормальної реакції N , або від сили нормального тиску Pn , причому Fтр = kN або Fтр = kPn , де k - Коефіцієнт тертя ковзання , що залежить від тих самих факторів, що і коефіцієнт тертя спокою k0 , а також від швидкості відносного руху тіл, що стикаються.
16. Тертя кочення- Це перекочування одного тіла по іншому. Сила тертя ковзання не залежить від величини тертьових поверхонь, а тільки від якості поверхонь тертьових тіл і від сили, що знижує поверхні, що труться, і спрямованої перпендикулярно до них. F=kN, де F- Сила тертя, N– величина нормальної реакції та k – коефіцієнт тертя під час ковзання.
17. Рівновагу тіл за наявності тертя- це максимальна сила зчеплення, пропорційна нормальному тиску тіла на площину.
Кут між повною реакцією, побудованою на найбільшій силі тертя при даній нормальній реакції, та напрямом нормальної реакції, називається кутом тертя.
Конус з вершиною в точці застосування нормальної реакції шорсткої поверхні, що утворює якого становить кут тертя з цією нормальною реакцією, називається конусом тертя.
Динаміка.
1. У динаміцірозглядається вплив взаємодій між тілами на їхній механічний рух.
Маса– це малярська характеристика матеріальної точки. Маса стала. Маса ад'єтивна (складається)
Сила –це вектор, який повністю характеризує взаємодію у ній матеріальної точки коїться з іншими матеріальними точками.
Матеріальна точка- Тіло, розміри і форма якого несуттєві в аналізованому русі. (ex: в поступальному русі тверде тіло можна вважати матеріальною точкою)
Системою матеріальнихточок зв. безліч матеріальних точок, що взаємодіють між собою.
1 закон Ньютона:будь-яка матеріальна точка зберігає стан спокою або рівномірного прямолінійного руху доти, доки зовнішні впливи не змінять цього стану.
2 закон Ньютона:прискорення, що придбавається матеріальною точкою в інерційній системі відліку, прямо пропорційно діє на точку силі, обернено пропорційно масі точки і в напрямку збігається з силою: a=F/m
3 закон Ньютона:сили взаємодії двох матеріальних точок в інерційній системі відліку рівні за модулем і спрямовані в протилежні сторони : Fik = - Fki
Чи знаєте Ви, у чому хибність поняття "фізичний вакуум"?
Фізичний вакуум - поняття релятивістської квантової фізики, під ним там розуміють нижчий (основний) енергетичний стан квантованого поля, що має нульовий імпульс, момент імпульсу та інші квантові числа. Фізичним вакуумом релятивістські теоретики називають повністю позбавлене речовини простір, заповнений невимірюваним, отже, лише уявним полем. Такий стан на думку релятивістів не є абсолютною порожнечею, але простір, заповнений деякими фантомними (віртуальними) частинками. Релятивістська квантова теорія поля стверджує, що, у згоді з принципом невизначеності Гейзенберга, у фізичному вакуумі постійно народжуються і зникають віртуальні, тобто частки, що здаються (кому здаються?): відбуваються так звані нульові коливання полів. Віртуальні частки фізичного вакууму, а отже, він сам, за визначенням не мають системи відліку, тому що в іншому випадку порушувався б принцип відносності Ейнштейна, на якому ґрунтується теорія відносності (тобто стала б можливою абсолютна система вимірювання з відліком від частинок фізичного вакууму, що у свою чергу однозначно спростувало б принцип відносності, на якому побудована СТО). Таким чином, фізичний вакуум і його частинки не є елементами фізичного світу, але лише елементи теорії відносності, які існують не в реальному світі, але лише в релятивістських формулах, порушуючи при цьому принцип причинності (виникають і зникають так), принцип об'єктивності (віртуальні частки можна вважати залежно від бажання теоретика або існуючими, або не існуючими), принцип фактичної вимірності (не спостерігаються, не мають своєї ISO).
Коли той чи інший фізик використовує поняття "фізичний вакуум", він або не розуміє абсурдності цього терміна, або лукавить, будучи прихованим або явним прихильником релятивістської ідеології.
Зрозуміти абсурдність цього поняття найлегше звернувшись до витоків його виникнення. Народжено воно було Полем Діраком у 1930-х, коли стало зрозуміло, що заперечення ефіру в чистому вигляді, як це робив великий математик, але посередній фізик вже не можна. Занадто багато фактів суперечить цьому.
Для захисту релятивізму Поль Дірак ввів афізичне та алогічне поняття негативної енергії, а потім і існування "моря" двох компенсуючих один одного енергій у вакуумі - позитивної і негативної, а також "моря" частинок, що компенсують одна одну, - віртуальних (тобто здаються) електронів і позитронів у вакуумі.
У статиці, як і кінематиці (п° 51), твердим тілом називається система матеріальних точок, незмінно пов'язаних між собою. Ця система є, таким чином, абсолютно тверде тіло, точки якого залишаються на незмінних відстанях один від одного, які б не були сили, що діють на ці точки і яким би не було рухом тіла.
Певне в такий спосіб тіло є, звісно, ідеалізація. Насамперед, фізика вчить нас, що тверді тіла складаються з молекул, які самі мають дуже складну будову і можуть перебувати у найрізноманітніших прихованих рухах. Саме про молекули, взяті в їх середніх положеннях, можна сказати, що вони залишаються з великим ступенем наближення на тих і тих.
ж відстанях один від одного. Таким чином, тільки на молекули в їхніх середніх положеннях ми можемо дивитися як на матеріальні точки. Але це ще не все; навіть якщо знехтувати прихованими молекулярними рухами та звертати увагу лише на видимі переміщення частинок, то й тоді всі тіла природи змінюють свою форму під дією прикладених до них сил; внутрішні сили, що діють між частинками того самого тіла, залежать, як ми це знаємо (п° 109), від цих деформацій. Тим не менш, оскільки деформації тіл, званих у фізиці «твердими», дуже малі, ними можна знехтувати в першому наближенні, якщо прикладені до тіла сили не надто великі і якщо ми не займаємося вивченням внутрішніх сил. Визначення внутрішніх сил і видимих деформацій, що відбуваються в твердих тілах, є важким завданням, яке вже не стосується статики, а теорії пружності. Теорія, яку ми викладатимемо, з тим більшою точністю застосовується до твердих фізичних тіл, чим більше вони наближаються до абсолютно твердого тіла.
З логічного погляду геометрична статика твердого тіла повинна розглядатися як гранична теорія. Вона викладає відоме число загальних законів, що застосовуються до всіх твердих тіл, які б не були їх молекулярна будова та їх пружні властивості, якщо тільки деформації можна вважати нескінченно малими. Однак побудована таким чином теорія є неповною теорією рівноваги, оскільки вона систематично залишає осторонь пружні властивості, залучення яких стає в деяких випадках абсолютно необхідним. У цих випадках методи геометричної статики виявляються недостатніми для вирішення всіх питань, які може поставити перед нами завдання рівноваги. Деякі з цих питань можуть бути суперечливими, якщо зберегти гіпотезу абсолютної незмінності твердого тіла.
Одного умови недеформованості недостатньо, щоб обґрунтований, теорію рівноваги твердих тіл;
до цього потрібно приєднати, як доповнення до визначення твердого тіла, наступний механічний постулат:
Постулат. - Не змінюючи нічого в умовах рівноваги твердого тіла, можна додати або відкинути дві рівні і прямо протилежні сили, що додаються до двох його точок.
Цей постулат можна було б вивести із загального принципу, відомого під назвою принципу віртуальних переміщень, але ми поки що цього не робитимемо. Ми встановимо згаданий принцип в одному з наступних розділів як основу аналітичної статики. Було б також марно вводити цей постулат, якщо прийняти основні закони динаміки в тому вигляді, як ми їх виклали в попередній частині курсу, тому що постулат, як ми це побачимо пізніше, являє собою простий окремий випадок однієї загальної теореми динаміки твердого тіла. Якщо ми вводимо його тут, то робимо це з метою, щоб зберегти за статикою характер самостійної дисципліни. Ми будемо дивитися на цей постулат, з погляду фізики, як на прямий наслідок досвіду; з точки зору теоретичної механіки ми розглядатимемо його як доповнення до визначення твердого тіла, прийнятого в статиці, отримуючи при цьому ту вигоду, що ми звільняємося від введення молекулярної гіпотези.
Як було помічено в теорії векторів (п° 28), цей основний постулат тягне як слідство таку пропозицію:
Не порушуючи умов рівноваги твердого тіла, можна перенести точку докладання сили в довільну точку її лінії дії, аби ця нова точка була пов'язана з тілом.
Само собою зрозуміло, що в цьому реченні йдеться лише про стан рівноєсія тіла, а не про ті дії, які надають один на одного різні точки тіла, так як ці внутрішні дії, звичайно, зміняться при зміні точки застосування силу, зазначену
операцію можна, наприклад, виконати, коли тверде тіло міститься на деяких опорах, але в жодному разі не можна стверджувати, що перенесення сили в цьому випадку не змінить реакцій опор. Було б, отже, великою помилкою застосовувати принцип перенесення сили щодо реакцій опор, переносячи, наприклад, у точку опори ту чи іншу з прикладених сил. Єдиними умовами, які можна законно застосовувати в цьому випадку, виявляються загальні умови рівноваги, тому що останні завжди є необхідними умовами.
185. Приведення сил, прикладених до твердого тіла (статична думка).
Ми щойно бачили, що можна, не порушуючи рівноваги твердого тіла, зробити над силами, прикладеними до точок тіла, такі операції:
1°. Додавання або розкладання сил, прикладених в одній точці.
2 °. Додаток або відкидання двох рівних і протилежних сил.
3 °. Перенесення сили у довільну точку її лінії дії.
Ці операції, як це було встановлено в теорії векторів (п° 29), являють собою елементарні операції, які дозволяють привести один до одного дві еквівалентні системи векторів. Звідси отримуємо таку теорему:
Не порушуючи рівноваги твердого тіла, можна замінити будь-яку систему сил, прикладених до тіла, іншою системою сил, що є системою векторів, еквівалентною першою.
Такі дві системи сил називають еквівалентними.
Завдання приведення системи сил, прикладених до твердого тіла, збігається, таким чином, із завданням приведення системи векторів, тому ми можемо висловити такі висновки:
1°. Приведення до двох сил. Система сил, прикладених до твердого тіла, може бути наведена,
порушення рівноваги тільки до двох сил, з яких одна прикладена в довільно обраній точці тіла (п° 26).
2 °. Приведення до сили та пари. Система сил, прикладених до твердого тіла, може бути наведена, без порушення рівноваги, до однієї сили, прикладеної в довільній точці тіла, і до однієї пари. Сила є результуюча R всіх сил системи, перенесених в точку О (головний вектор), а момент пари дорівнює головному моменту системи сил щодо тієї ж точки (п° 24).
Для того щоб система сил приводилася до однієї результуючої R, необхідно і достатньо, щоб для довільно взятого центру приведення Про геометрична сума R була відмінна від нуля, а результуючий момент G (якщо він не дорівнює нулю) був перпендикулярний R. Рівнодійна спрямована в цьому випадку центральної осі системи.
Для того щоб система приводилася до однієї пари, необхідно і достатньо, щоб головний вектор R дорівнював нулю, а головний момент О був відмінний від нуля. У цьому випадку головний момент системи той самий для кожної точки простору.
Нарешті, якщо вектори R і G обидва рівні нулю, система еквівалентна нулю, і тіло буде в рівновазі. Ми розглянемо цей випадок у наступному п°.
Сили у площині. - Коли всі сили діють в одній площині, і геометрична сума їх R не дорівнює нулю, результуючий момент G (так само, як і момент кожної сили) перпендикулярний R. Отже, ці сили наводяться до однієї рівнодіючої R, прикладеної в точці центральної осі (що лежить, очевидно, у площині дії сил). Якщо R дорівнює нулю, то система приводиться до однієї пари, а якщо, крім того, G дорівнює нулю, то система знаходиться в рівновазі.
Корисно помітити, що будь-яка плоска система сил завжди може бути приведена до двох сил, приклад. ним у двох даних точщх А і площині,
Насправді кожна сила t, прикладена в точці О, що лежить поза прямою АВ, розкладається, за напрямами ОА і ОВ, на дві складові, які можна перенести в точки А і В. Якщо точка Про докладання сили лежить на АВ, і лінія дії сили проходить через А, то точку докладання сили можна перенести якщо лінія дії сили не проходить через А, то точку докладання сили можна перенести вздовж лінії дії за пряму АВ, що призводить до першого випадку.
Паралельні сили. - Якщо сили паралельні, та їх геометрична сума R не дорівнює нулю, то результуючий момент G перпендикулярний R, і, отже, ці сили наводяться до однієї результуючої R прикладеної в точці центральної осі (паралельної загальному напрямку сил). Якщо R дорівнює нулю, то система приводиться до однієї пари або знаходиться в рівновазі (коли момент пари дорівнює нулю).
186. Рівновагу твердого тіла.
Для рівноваги вільного твердого тіла необхідно і достатньо, щоб система доданих до нього сил (тобто, в даному випадку зовнішніх сил) була еквівалентна нулю.
Ми знаємо вже, що ця умова необхідна, оскільки вона є загальною умовою рівноваги.
Для твердого тіла воно виявляється також достатнім. Справді, якщо система сил еквівалентна нулю, вона може бути приведена до нуля елементарними операціями і, отже, можна просто відкинути всі її сили. На підставі цього маємо дві умови рівноваги у векторній формі
Ці умови розпадаються на шість рівнянь алгебри. Нехай X, У, Z - проекції вектора R на три прямокутні осі координат, або суми проекцій всіх сил на осі; нехай далі L, М,
Результуючі моменти системи цих сил щодо тих самих осей; тоді ці шість рівнянь будуть:
Часто кажуть, що три перші рівняння (еквівалентні рівності R = 0) є умовами рівноваги для поступального руху, а три останні (еквівалентні рівності G = 0) - умови рівноваги для обертання. Підставу для таких назв ми отримаємо пізніше, при застосуванні до вирішення того самого завдання принципу віртуальних робіт.
187. Приведення сил, прикладених до твердого тіла (динамічний погляд). Динамічна рівновага.
У динаміці твердого тіла ми покажемо, що у разі вільного твердого тіла його рух буде повністю визначено, якщо для кожного моменту часу дано головний вектор і головний момент щодо будь-якої точки всіх доданих до нього сил. Звідси маємо таку теорему:
Якщо дві системи сил, прикладених до твердого тіла, завжди еквівалентні між собою з погляду теорії векторів, всі вони будуть еквівалентні і з погляду руху тіла.
Ця теорема, по суті, відноситься до динаміки, але вона тісно пов'язана також із геометричною статикою. Справді, її можна довести за допомогою простого узагальнення основного постулату, який уточнює визначення твердого тіла в статиці (п° 184).
Насправді замінимо цей постулат наступним:
Не змінюючи нічого в стані спокою або руху твердого тіла, можна додати або відкинути дві рівні і прямо протилежні сили, що додаються до двох точок тіла.
Цей більш загальний постулат, який може бути перевірений безпосередньо досвідом, дозволяє дати таке
ж узагальнення поняття приведення та еквівалентності сил. Насправді, у всіх реченнях п. 185 можна замінити слова «не порушуючи рівноваги» словами «нічого не змінюючи у стані спокою чи руху тіла». Тоді висновок п°185 виявляється рівносильним висловленому динамічному принципу.
Зазначимо, зокрема, одне слідство:
Якщо тверде тіло під дією системи сил S залишається в рівновазі, то ця система сил (як еквівалентна нулю) нічого не може змінити і в стані руху тіла, якщо останнє вже не спокоїться.
Тепер цілком природно встановити таке визначення:
Ця система сил перебуває у рівноваг з погляду динаміки, чи динамічному рівновазі, якщо сили що неспроможні змінити стан спокою чи руху твердого тіла, якого вони прикладені.
Маючи це визначення, можна висловити таку пропозицію:
Для того, щоб сили, прикладені до твердого тіла, знаходилися в динамічній рівновазі, необхідно і достатньо, щоб вони являли собою систему векторів, еквівалентну нулю.
Цей спосіб уявлення рівноваги сил, прикладених до твердого тіла, дуже поширений, і слово «рівновагу» дуже часто вживається саме в цьому сенсі. Однак не слід забувати, що таке уявлення про рівнозесію відноситься швидше до динаміки, ніж до статики.
188. Центр важкості твердого тіла.
Приведення сил, прикладених до твердого тіла, може бути, зокрема, виконано сил ваги всіх матеріальних точок, у тому числі тіло складається. Всі ці сипи є паралельними силами, однаково орієнтовані. Ця система векторів наводиться тому до однієї рівнодіючої, рівної загальної ваги Р твердого тіла та прикладеної в центрі цих паралельних векторів, який
ми позначатимемо Г. Ця точка, становище якої у тілі залежить від його орієнтування щодо Землі, є центр тяжкості тіла. Ми побачимо у наступному розділі, як можна визначити його координати. З попередніх теорем випливає, що дія сил тяжіння на різні точки твердого тіла як зі статичної, так і динамічної точки зору, приводиться до єдиної сили, до повної ваги, прикладеного в центрі тяжкості тіла.