Kol mekanizması- çubuk şeklindeki kaldıraç yapıları şeklinde yapılan bağlantılardan oluşan bir mekanizmadır.
Kol mekanizmaları hemen hemen tüm makine türlerinde yaygındır.
2.1. KOL MEKANİZMALARININ SINIFLANDIRILMASI
Kaldıraç mekanizmalarının tamamı kinematik zincir tipine ve yapıya göre sınıflandırılmıştır.
Kinematik zincirin türüne göre iki grup ayırt edilir.
Kapalı kinematik zincirli mekanizmalar - bunlar kaldıraç mekanizmalarıdır -
Yapılarında yalnızca kapalı kinematik içeren nizmalar
kayak zincirleri (bkz. Şekil 1.6, Şekil 2.1).
Açık kinematik zincirli mekanizmalar - bunlar kaldıraç mekanizmalarıdır
Yapılarında yalnızca açık kinematik zincirler içeren mekanizmalar (bkz. Şekil 1.4, c, Şekil 2.7).
Çoğu durumda, kapalı kinematik zincire sahip kaldıraç mekanizmaları düzlemsel mekanizmalardır ve açık kinematik zincire sahip kaldıraç mekanizmaları uzaysaldır.
Kaldıraç mekanizmalarının yapısı basit, basit veya karmaşık olabilir.
Temel mekanizmalar– bunlar, yapısı bağımsız olarak hareketi dönüştürebilen parçalara bölünemeyen mekanizmalardır.
(Şekil 2.3).
Basit mekanizmalar– bunlar, yapısı bir temel mekanizma ve bir yapısal gruptan oluşan kaldıraç mekanizmalarıdır.
(Şekil 1.6, Şekil 2.1).
Karmaşık mekanizmalar- bunlar, yapısı bir veya daha fazla temel mekanizma ve iki veya daha fazla yapısal gruptan oluşan kaldıraç mekanizmalarıdır.
Karmaşık kaldıraç mekanizmaları aşağıdakilere ayrılmıştır:
aynı tipte - bunlar, yapısı aynı temel mekanizmaları ve benzer yapısal bağlantı gruplarını içeren karmaşık kaldıraç mekanizmalarıdır;
çoklu tip - bunlar, yapısı farklı temel mekanizmalar ve farklı yapısal bağlantı grupları içeren karmaşık kaldıraç mekanizmalarıdır;
kombine– bunlar, yapısı benzer ve çok tip mekanizmaların birleşimi sonucu oluşan karmaşık kaldıraç mekanizmalarıdır.
Tüm basit kaldıraç mekanizmaları düz mekanizmalardır ve bunlar da temel tipik şemalara bölünmüştür:
menteşe mekanizması (bkz. Şekil 1.6, b);
2. KOL DİŞLİLERİ
2.1.
krank kaydırma mekanizması (bkz. Şekil 1.6, a); külbütör mekanizması (Şekil 2.1, a); teğetsel mekanizma (Şekil 2.1, b); sinüs mekanizması (Şekil 2.1, c).
Düz kol mekanizmalarının hareketli bağlantıları, hem en basit hareket türlerini (dönme ve öteleme) hem de karmaşık hareketleri gerçekleştirebilir.
Pirinç. 2.1. Tipik düz kaldıraç mekanizmalarının blok diyagramları
Dönme hareketlerini gerçekleştiren bağlantılar arasında krank, külbütör kolu, külbütör ve salınım sürgüsü bulunur.
Krank, yalnızca dönme kinematik çiftlerinin bir parçası olan ve dönme ekseni etrafında 360°'den fazla bir açıyla dönebilme yeteneğine sahip olan bir kaldıraç mekanizmasının bir bağlantısıdır (bkz. Şekil 1.6, Şekil 2.1, bağlantı 1) .
Külbütör kolu, yalnızca dönme kinematik çiftlerinin bir parçası olan ve dönme ekseni etrafında 360°'den daha az bir açıyla dönebilme yeteneğine sahip olan bir kaldıraç mekanizmasının bir bağlantısıdır (bkz. Şekil 1.6, bağlantı 4).
Bağlantı, dönme ve öteleme kinematik çiftlerinin bir parçası olan ve dönme ekseni etrafında 360°'den daha az bir açıyla dönme yeteneğine sahip olan kaldıraç mekanizmasının bir bağlantısıdır (Şekil 2.1, bağlantı 5).
Sallanan kaydırıcı- bu, bir çubukla öteleme kinematik çifti ve bir standla dönme kinematik çifti oluşturan bir kaldıraç mekanizmasının bir bağlantısıdır.
Sunulan tüm bağlantılar rafla etkileşime girer. Bu durumda krank çoğu durumda başlangıç, ayar veya öncü bağlantıdır.
Öteleme hareketlerini gerçekleştiren bağlantılar arasında kaydırıcı, taş ve çubuk bulunur.
Kaydırıcı, stand ile öteleme kinematik çifti oluşturan bir bağlantıdır (bkz. Şekil 1.6, bağlantı 3).
Taş, kızakla öteleme kinematik çifti oluşturan bir bağlantıdır (Şekil 2.1, bağlantı 6).
Çubuk, sallanan veya sabit bir kaydırıcıyla öteleme kinematik bir çift oluşturan bir bağlantıdır (Şekil 2.1, bağlantı 7).
Biyel kolları karmaşık hareketleri gerçekleştiren bağlantılardır.
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |

2. KOL DİŞLİLERİ
2.1. Kol mekanizmalarının sınıflandırılması
Biyel kolu, yalnızca rafla bağlantısı olmayan hareketli bağlantılarla kinematik çiftler oluşturan bir kaldıraç mekanizmasındaki bağlantıdır.
(bkz. Şekil 1.6, bağlantı 2).
2.2. KALDIRAÇ MEKANİZMALARININ YAPISAL ANALİZİ
Herhangi bir kaldıraç mekanizmasının yapısını incelerken iki yön ayırt edilir: yapısal analiz ve yapısal sentez.
Yapısal analiz bir mekanizmanın yapısını inceleme sürecidir, yani gerçekleştirdikleri bağlantıların sayısını ve hareket türlerini, kinematik çiftlerin sayısını ve türünü, yapısal grupları ve kinematik zincirleri, hareketlilik sayısını ve kusurların varlığını belirleme sürecidir.
Gerektiğinde ortadan kaldırılan yapılarındaki kusurları tespit etmek için mekanizmaların yapısal analizi yapılır.
Yapısal kusurları ortadan kaldırmanın (ortadan kaldırmanın) bir örneği olarak, irrasyonel yapıya sahip düz bir kaldıraç mekanizmasını düşünün (bkz. Şekil 1.12, a). Bu mekanizma yalnızca bağlantıların uzunlukları aşağıdaki oranlarda olduğunda çalışır durumda kalır:
yakh: l OA = l BC,l AB = l DE = l OC vel OD = l EC. Sonuç olarak mekanizmanın noktaları her zaman bir paralelkenar olan OABC şeklini oluşturur. Daha sonra, mekanizma bağlantılarının hareketlerini değiştirmeden, bağlantı çubuğunu 2 çıkarabilirsiniz, çünkü D ve E noktalarında menteşe merkezleri olan 1 ve 4 numaralı bağlantılarla kinematik çiftler oluşturan bu bağlantı, bu bağlantılara bağlantı koşullarını etkilemeyen bağlantı koşulları uygular. onların hareketinin doğası. Bu durumda, bağlantı çubuğunun (2) bağlantılara (1 ve 4) uyguladığı bağlantı koşulları pasif veya yedeklidir. Buna karşılık, D ve E noktalarında menteşe merkezlerine sahip kinematik çiftlerin hareketliliği, yerel hareketliliğin bir örneğidir, çünkü onların yokluğunda mekanizmanın geri kalan bağlantılarının hareketliliği değişmeyecektir. Mekanizma yapısından biyel kolu 2 yerine biyel kolu 3 çıkarılırsa benzer bir durum ortaya çıkacaktır.
Yapısal kusurları ortadan kaldırmak için, mekanizma devresindeki yedekli veya pasif bağlantıların varlığını ve sayısını tam olarak bilmek gerekir. Yedekli veya pasif bağlantıların sayısını hesaplamak için aşağıdaki ilişki kullanılır:
q =W o +W m +W ,
burada W o ,W m ,W – verilen, yerel ve hesaplanan hareketlilik.
Yedekli veya pasif bağlantılar yalnızca birkaç devreli kapalı kinematik zincirlerde mevcuttur. Mekanizmalarda iki tür devre vardır: bağımlı ve bağımsız. Bir devre, diğer devrelerden en az bir bağlantıyla farklılık gösteriyorsa bağımsızdır. Bağımlı devreler birbirlerini kopyalarlar ve onları oluşturan bağlantılar yedekli veya pasif bağlantılar oluşturur. Yani Şekil 2'de sunulan mekanizmanın yapısı. 1.12, birkaç devre içerir - OABC ve ODEC. Konturlar bağımlıdır çünkü aynı miktarda oluşurlar
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.2.
Ve bağlantı türleri. Aynı zamanda, daha önce bu mekanizmanın yapısının kusurlara sahip olduğunu, yani bağımlı devrelerin varlığını doğrulayan yedekli veya pasif bağlantılar ve yerel hareketlilik içerdiğini öğrenmiştik. Bu nedenle bağımlı devre sayısını belirlemek için mekanizmanın toplam devre sayısının bilinmesi gerekir. Devre sayısı şu ifade kullanılarak belirlenir:
K = p−n,
burada p, mekanizmanın yapısındaki kinematik çiftlerin sayısıdır; n, mekanizmanın hareketli bağlantılarının sayısıdır,
n = k− 1,
burada k, sehpa dahil olmak üzere mekanizma bağlantılarının toplam sayısıdır.
Yapısal kusurlar hariç tutulduktan sonra yapısal grupların sayısı, kinematik çiftlerin sayısı ve türü, ana hareketliliklerin sayısı belirlenir ve ardından çıkış bağlantısından başlayarak, birlikte mekanizmanın bileşiminden bağlantı grupları ayrılır. sıfıra eşit bir hareketliliğe sahiptir. Bu durumda mekanizmada kalan bağlantıların öncü bağlantıyla bağlantısını kaybetmemesini sağlamak gerekir.
Genel olarak, kaldıraç mekanizmalarının yapısal analizi aşağıdaki sorunların çözümüne indirgenmektedir:
uzaysal mekanizmalar için:
2) mekanizmanın manevra kabiliyetinin belirlenmesi.
düz mekanizmalar için:
1) mekanizmanın hareketliliğinin belirlenmesi;
2) mekanizmanın yapısının analizi.
Sunulan yapısal analiz sorunlarını inceledikten sonra, her iki kaldıraç mekanizması türü için ilk sorunun benzerliğini not edebiliriz. Aynı zamanda, ikinci görevler, formülasyondaki bazı farklılıklara rağmen, aynı amacı gütmektedir: yapısal kusurların varlığının belirlenmesi.
Mekanizmaların hareketliliği
Mekanizmanın hareketliliği- bu, zaman içinde dikkate alınan bir anda bir düzlemdeki veya uzaydaki mekanizma bağlantılarının konumlarını benzersiz bir şekilde belirleyen bağımsız genelleştirilmiş koordinatların sayısıdır.
Mekansal mekanizmaların hareketliliğini belirlemek için yapısal formüller P. I. Somov ve düz mekanizmalar için P. L. Chebyshev tarafından elde edildi. Her iki yapısal formül de aynı yapı ilkelerine dayanmaktadır; dolayısıyla genelleştirilmiş bir biçimde yapısal formüller şu şekilde temsil edilebilir;
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.2. Kaldıraç mekanizmalarının yapısal analizi
W = H n+ ∑ (H− i) pi ,
ben= 1n
burada H, hareketlilik derecesinin sayısıdır (uzaysal mekanizmalar için H = 6, düz mekanizmalar için H = 3); p i, kinematik hareketlilik çiftlerinin sayısıdır;
i kinematik çiftin hareketlilik sayısıdır. Yapısal formüllerin iki yazım biçimi vardır: 1) kinematik çiftlerin sınıflarında:
düz mekanizmalar için P. L. Chebyshev'in formülü:
W = 3 n− 2 p5 – p4,
W =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1 ,
nerede p 5 , p 4 , p 3 , p 2 , p 1 - sırasıyla beşinci, dördüncü, üçüncü, ikinci ve birinci sınıfın kinematik çiftlerinin sayısı;
2) kinematik çiftlerin hareketlilik derecelerinde: düz mekanizmalar için P. L. Chebyshev'in formülü:
W = 3 n− 2 p1 – p2 ,
mekansal mekanizmalar için P. I. Somov'un formülü:
W =6 n −5 p 1 −4 p 2 −3 p 3 −2 p 4 −p 5 ,
burada p 1 , p 2 , p 3 , p 4 , p 5 - sırasıyla bir, iki, üç, dört ve beş hareketliliğe sahip kinematik çiftlerin sayısı.
Kol mekanizmalarının yapısının bileşimi
Kaldıraç mekanizmalarının analizi ve sentezi sorunlarını çözmek için Profesör L.V. Assur, yedek bağlantıları olmayan ve yerel hareketliliğe sahip olmayan mekanizmaların birincil (temel) mekanizmalardan ve yapısal bağlantı gruplarından oluştuğu orijinal bir yapısal sınıflandırma önerdi (Şekil 2.2). ).
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |

2. KOL DİŞLİLERİ
2.2. Kaldıraç mekanizmalarının yapısal analizi
Yapısal sentez
Mekanizma = PM+...+ PM+ SGZ+...+ SGZ
Yapısal analiz
Pirinç. 2.2. Assur'a göre mekanizma yapısının bileşimi
Birincil mekanizma(PM), bir veya daha fazla hareketliliğe sahip kinematik bir çift oluşturan hareketli ve sabit bağlantılardan oluşan temel bir mekanizmadır (Şekil 2.3).
Birincil mekanizmalar | ||||||
hareketlilik ile W = 1 | hareketlilik ile W > 1 | |||||
Pirinç. 2.3. Birincil mekanizmalar
Tanıma göre tüm birincil (temel) mekanizmalar, bir hareketli bağlantının bir sehpa ile birleşmesinden oluşur ve birinci sınıf mekanizmalardır. Bu durumda sınıf, hareketli parçaların sayısına karşılık gelir.
Yapısal bağlantı grubu(SGZ) oluşturan kinematik bir zincirdir
uzayda ve düzlemde hareketliliği her zaman sıfır olan ve benzer özelliklere sahip daha basit zincirlere ayrılmayan mekanizmanın hareketli bağlantılarıyla yıkanır
(pirinç. 2.4., Şekil 2.5., Şekil 2.6).
Başlangıçta, L.V. Assur'un yapısal sınıflandırması yalnızca dönme kinematik çiftlerine sahip düz kaldıraç mekanizmalarını kapsıyordu. Daha sonra, Profesör I. I. Artobolevsky bu sınıflandırmayı geliştirdi, onu düz kaldıraç mekanizmalarına ve öteleme kinematik çiftlerine kadar genişletti; bu, yapısal grubun daha düşük kinematik çiftlere sahip bir kinematik zincir olduğuna göre yapısal gruplar teorisinin oluşturulmasının temelini attı. koşulu karşılıyor
W s.g= 3 n s.g− 2 p 1− p 2= 0 ,
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.2. Kaldıraç mekanizmalarının yapısal analizi
burada W s.g ,n s.g – yapısal grubun hareketliliği ve hareketli bağlantılarının sayısı
py; p 1 ,p 2 – karşılık gelen hareketliliğe sahip kinematik çiftlerin sayısı. Yapısal grupların bir özelliği statik belirsizlikleridir.
Sınırlanabilirlik Serbest bağlantı elemanlarına sahip bir rafa yapısal bir grup tutturulursa, statik olarak belirsiz bir kafes kiriş oluşur. Yapısal grupların bu özelliğini kullanarak mekanizmaların yapısal, kinematik ve kuvvet analizini yapmak uygundur. Tüm yapısal gruplarda uç bağlantılar yalnızca bir kinematik çiftin parçasıdır ve serbest bir bağlantı elemanına sahiptir. Bu tür bağlantılara tasma denir.
Tasma, yapısal bir grubun son halkasıdır; bir eleman bir kinematik çiftin parçasıdır ve bağlantının ikinci bir serbest elemanına sahiptir.
Yapısal gruplar yalnızca çift sayıda hareketli birim tarafından oluşturulabilir (bkz. Şekil 2.4 - 2.6). Bir yapısal grubun karmaşıklık derecesi, sınıfıyla karakterize edilir. Bir yapısal grubun sınıfı, en karmaşık bağlantının köşe sayısı dikkate alınarak bağlantıların ve kinematik çiftlerin sayısına göre belirlenir. Yapısal grupların karmaşıklığı mekanizmanın sınıfını belirler. Buna göre mekanizmanın sınıfı, bileşiminde yer alan en karmaşık yapısal grubun sınıfına göre belirlenir. Bir sınıf içinde yapısal gruplar takımlara bölünür. Yapısal grubun sırası potansiyel müşteri sayısına karşılık gelir.
Kaldıraç mekanizmalarının yapısında en yaygın yapısal gruplar, iki bağlantıdan (2 ve 3) ve beşinci sınıfın üç kinematik çiftinden oluşanlardır (Şekil 2.4). Bu yapısal gruplar, ikinci sınıfa karşılık gelen, iki köşeli iki hareketli bağlantı içerir. İkinci sınıfın yapısal gruplarının en az iki tasması vardır, bu da sınıf içinde birkaç takımın varlığını gösterir. Şu anda en yaygın olanı, karakteristik özelliği beş türün varlığı olan ikinci dereceden ikinci sınıfın yapısal gruplarıdır (Şekil 2.4).
Yapısal grubun türü, kinematik çiftlerin türüne ve sınıfına bağlı olarak derlenen yapısal formülü ile belirlenir. İkinci dereceden ikinci sınıfın yapısal grubu (Şekil 2.4, a), iki bağlantıdan, iki uçtan oluşur ve beşinci sınıfın üç dönme çiftini içerir, birinci tipe karşılık gelen bir BBB yapısal formülüne sahiptir. İkinci dereceden ikinci sınıfın ikinci tipi grubu (Şekil 2.4, b), aşırı dönme kinematik çiftlerinden birinin beşinci sınıfın öteleme çiftiyle değiştirilmesiyle elde edilir. Ortaya çıkan grubun yapısal formülü GSYİH veya PVV şeklinde olacaktır.
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |

2. KOL MEKANİZMALARI | |||||||||||
2.2. Kaldıraç mekanizmalarının yapısal analizi | |||||||||||
4A 1 | |||||||||||
Pirinç. 2.4. İkinci dereceden ikinci sınıfın yapısal grupları | |||||||||||
İkinci dereceden ikinci sınıfın üçüncü tip yapısal grubu (Şekil 2.4, c), ERW'nin yapısal formülüne sahiptir ve ortalama dönme kinematik çiftinin beşinci sınıfın öteleme çifti ile değiştirilmesi nedeniyle oluşur. İkinci dereceden ikinci sınıfın dördüncü tipi gruplar (Şekil 2.4, d), beşinci sınıfın her iki aşırı dönme kinematik çiftinin PVP'nin yapısal formülüne karşılık gelen öteleme çiftleriyle değiştirilmesiyle elde edilir. Aşırı ve orta dönme kinematik çiftlerinden birinin öteleme çiftleriyle değiştirilmesi, PPV veya VPP yapısal formülüne sahip olan ikinci dereceden ikinci sınıfın beşinci tipini elde etmemizi sağlar (Şekil 2.4, d).
Yalnızca ikinci sınıf yapısal grupları içeren mekanizmalar ikinci sınıf mekanizmalardır.
Teorik olarak büyük sınıfların yapısal grupları vardır, ancak müfredattaki yaygınlıklarının düşük olması nedeniyle kendimizi ikinci sınıfın yapısal grupları ile sınırlayacağız.
Uzaysal kaldıraç mekanizmalarının manevra kabiliyeti
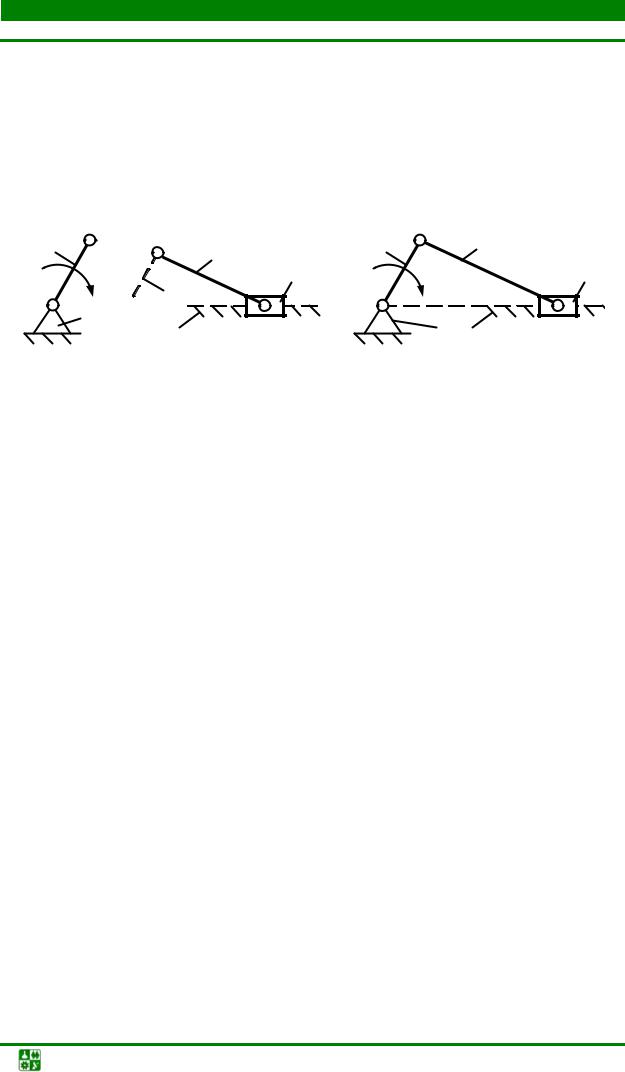
Uzamsal kaldıraç mekanizmalarının en yaygın temsilcileri manipülatörlerdir (Şekil 2.5, a).
Manipülatör, insan eline benzer eylemler gerçekleştiren uzamsal bir kaldıraç mekanizmasıdır.
Manipülatörler nesnelerin konumunu değiştirmek için tasarlanmıştır. Endüstriyel robotların manipülatörlerinin bağlantıları yalnızca
farklı sınıfların kinematik çiftlerini içeren kapalı kinematik zincirler, bu tür mekanizmaların birlikten daha büyük hareketliliğe sahip olmasına olanak tanır. Bununla birlikte manipülatörler, çalışması sırasında mekanizmanın yapısını değiştirme yeteneği ile karakterize edilir. Hizmet amacına bağlı olarak iki seçenek mümkündür.
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |

2. KOL DİŞLİLERİ
2.2. Kaldıraç mekanizmalarının yapısal analizi
Pirinç. 2.5. Endüstriyel robot manipülatör mekanizmasının şeması
İlk seçenek: Sabit bir nesnenin konumunu değiştirmeniz gerekir (Şekil 2.5, a). Zamanın ilk anında konumu değiştirilmesi gereken cisim sabit bir düzlem üzerinde durmaktadır ve hareketsizdir. Buna göre nesne ve düzlem birbirlerine belirli bağlantılar empoze eder. Üstelik düzlem ile nesne arasındaki ilişki kinematik durumunu değiştirmezse, bunlar tek bir sabit bağlantı, yani bir stand olarak düşünülebilir. Söz konusu nesnenin çıkış bağlantısı tarafından yakalanmasına karşılık gelen anda, bu bağlantı da hareketsiz hale gelir ve rafın bir elemanı olarak düşünülmelidir (Şekil 2.5, b). Buna göre mekanizmanın yapısındaki hareketli bakla sayısı birer birer azalmakta ve mekanizmanın bu ana kadar sahip olduğu açık kinematik zincir kapanarak hareket kabiliyetinin azalmasına yol açmaktadır. Bir sonraki anda, nesneyi daha ileri taşımak için sabit düzlemden koparmaya ihtiyaç duyulacaktır. Ancak böyle bir eylemi gerçekleştirmek için belirli bir anda kapalı bir kinematik zincire sahip olan manipülatörün en az bire eşit hareketliliğe sahip olması gerekir. Bir nesne sabit bir düzlemden ayrılır ayrılmaz bu düzlemle önceden var olan ilişkisini kaybedecektir ve gelecekte çıkış bağlantısıyla birlikte tek bir hareketli bağlantı olarak düşünülmelidir. Çıkış bağlantısıyla hareketliliğin yeniden sağlandığı anda, manipülatörün kinematik zinciri tekrar açılır, bu da mekanizmanın önceki hareketliliğine ve bir nesneyi belirli bir yasaya göre hareket ettirme yeteneğine yol açar.
İkinci seçenek: Parçayı sabit bir yüzeyde yapılmış belirli bir şekle sahip bir deliğe yerleştirmeniz gerekir. Parçanın çıkış bağlantısının deliğe takılmasına karşılık gelen anda, çıkış bağlantısı hareketli kalır ve manipülatörün kinematik zinciri kapanır (Şekil 2.5, c). Bu durumda hareketli bağlantı sayısı korunur ve parçanın oluşturduğu yeni kinematik çiftin ve monte edildiği sabit yüzeyin hareketliliği ile orantılı olarak mekanizmanın hareketliliği değişir. Çıkış bağlantısı ile parça arasındaki bağlantının sona ermesi anında
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.2. Kaldıraç mekanizmalarının yapısal analizi
kinematik zincir açılır ve mekanizma özelliklerini geri kazandırır.
Ele alınan durumlardan, manipülatörün çalışabilirliğinin sağlanmasının ancak aşağıdaki koşulun karşılanması durumunda mümkün olduğu anlaşılmaktadır:
m ≥ 1.
burada m, manipülatörün manevra kabiliyetidir.
Manevra kabiliyeti, manipülatörün sabit bir çıkış bağlantısıyla hareketliliğidir.
Uzamsal mekanizmaların manevra kabiliyeti, Somov formülüne göre elde edilen ifadeyle belirlenir:
m =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1
burada tüm katsayılar § 2.3'te sunulanlarla aynıdır.
2.3. KALDIRAÇ MEKANİZMALARININ SENTEZİ
Mekanizmaların sentezi iki aşamada gerçekleştirilir. İlk aşamaya yapısal sentez, ikinci aşamaya metrik sentez denir. Her aşamada takip edilen genel kriterler şunlardır: mekanizmanın toplam ağırlık özelliklerinin ve maliyetinin en aza indirilmesi, ayrıca baklaların üretilebilirliğinin sağlanması ve çalışma koşullarının yerine getirilmesi. Ancak her aşamanın farklı hedefleri vardır.
Aşamaların her birini ayrı ayrı karakterize edelim.
Yapısal sentez gerekli özelliklere sahip bir mekanizmanın mevcut yapısının yeni veya modernleştirilmesi (iyileştirilmesi) sürecidir: belirli sayıda hareket, yerel hareketlerin ve gereksiz bağlantıların yokluğu, minimum bağlantı, kinematik çiftlerin kullanımı belli bir tür.
Yapısal sentez aşamasında, bağlantı sayısını, kinematik çiftlerin sayısını, tipini ve hareketliliğini, ayrıca yedek bağlantı sayısını ve yerel hareketliliği belirleyen mekanizmanın yapısal bir diyagramı oluşturulur. Her bir yedek bağlantı ve yerel hareketlilik mekanizmasının yapısal şemaya dahil edilmesi, kanıtlanabilir bir şekilde gerekçelendirilmelidir. Yapısal bir diyagram seçerken ana koşullar belirtilen parametrelerdir: gerekli hareket sayısı, yerel hareketlerin ve yedek bağlantıların olmaması, bağlantı sayısının en aza indirilmesi, belirli bir tür veya sınıftaki kinematik çiftlerin kullanılması. Aynı zamanda belirleyici koşullar şunlardır: verilen hareket yasası ve giriş ve çıkış bağlantılarının eksenlerinin konumu. Mekanizmanın giriş ve çıkış bağlantılarının eksenleri paralel ise düz blok diyagram seçilir. Giriş ve çıkış bağlantılarının eksenleri kesiştiğinde veya kesiştiğinde, şunu kullanın:
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.3. Kaldıraç mekanizmalarının sentezi
mekansal bir şema kullanır. Çoğu durumda, yapısal sentezin görevi, bir dizi standart diyagramdan bir mekanizmanın yapısal diyagramını seçmektir.
Düz kaldıraç mekanizmalarının yapısal sentezi, L.V. Assur'un yapısal sınıflandırmasına uygun olarak gerçekleştirilir (bkz. Şekil 2.3). Örnek olarak, bir krank-kaydırma mekanizmasının yapısal sentezini düşünün (Şekil 2.6).
Pirinç. 2.6. Bir krank kaydırma mekanizmasının yapısal sentez şeması
Yapısal analizin ilk görevinin sonucu, mekanizmanın hareketliliğinin birliğe eşit olduğunu göstermektedir; bu nedenle, birincil mekanizma olarak, bağlantıları beşincinin dönme kinematik çiftini oluşturan karşılık gelen hareketliliğin bir grup bağlantısını seçiyoruz. sınıf (Şekil 2.6, a). Seçilen birincil mekanizmaya, 2. tipin 2. sınıfının 2. sınıfının yapısal bir bağlantı grubunu ekliyoruz (Şekil 2.6, b). Bu şekilde elde edilen mekanizma rasyonel bir yapıya sahip olacak, yani yapısal şeması yapısal kusurlar içermeyecektir (Şekil 2.6, c).
Uygun sınıf, tip ve düzendeki gerekli sayıda yapısal grubun sırayla birleştirilmesiyle daha karmaşık yapısal diyagramlar elde edilebilir. Aynı zamanda belirtilen diğer tüm koşullar sağlandığında mekanizmanın yapısının rasyonel kalmasını sağlamak gerekir.
Yapısal sentez aşamasının sonucu, kabul edilen kriterleri karşılayan mekanizmanın yapısal bir diyagramıdır.
Metrik sentez mekanizma bağlantılarının temel geometrik boyutlarının ve verilen koşulları en iyi şekilde karşılayan ve kalite göstergelerinin optimum kombinasyonunu sağlayan çalışma yüzeyi profillerinin konfigürasyonlarının belirlenmesi işlemidir.
Metrik sentezin amaçları şunlardır:
1) giriş veya çıkış bağlantısının belirtilen konumlarına dayanarak mekanizmanın kinematik diyagramının sentezi;
2) mekanizmanın kinematik diyagramının belirtilen geometrik parametrelere göre sentezi;
3) çıkış bağlantısının belirli bir hareket yasasına göre mekanizmanın kinematik diyagramının sentezi;
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.3. Kaldıraç mekanizmalarının sentezi
4) mekanizmanın kinematik diyagramının verilen kinematik parametrelere göre sentezi: çıkış bağlantısının ortalama hızı, ortalama hızın eşitsizlik katsayısı;
5) basınç açısının veya iletim açısının belirli bir değerine dayanarak mekanizmanın kinematik diyagramının sentezi.
Metrik sentez problemlerinin çözümü, sentezin her iki aşamasının kriterlerini karşılayan mekanizmanın kinematik diyagramıdır.
Kinematik diyagram- bu, GOST tarafından önerilen semboller kullanılarak belirli bir ölçek faktöründe yapılan mekanizmanın grafiksel bir temsilidir.
Kinematik diyagram, baklaların sayısı ve gerçekleştirdiği hareketlerin türü, kinematik çiftlerin hareketlilik sayısı ve sınıfı, kinematik zincirlerin sayısı ve türü ve baklaların boyutları hakkında bilgi içerir.
Kaldıraç mekanizmalarının metrik sentezi problemlerini çözerken, aşağıdaki kriterlere göre yönlendirilirler:
1) Bağlantıların dönmesine ilişkin koşul - tasarlanan mekanizma, giriş veya çıkış bağlantılarının dönmesine olanak sağlamalıdır
360°'den fazla açıya sahip kapılar;
2) mekanizmanın boyutlarına ilişkin tasarım kısıtlamaları - tasarlanan mekanizmanın, belirtilen aralıklara uyan genel boyutlara sahip olması gerekir;
3) mekanizmanın bağlantılarının belirtilen hareket yasasını veya belirli konumlarını sağlamanın doğruluğu - tasarlanan mekanizma, belirtilen hareket yasasının veya bağlantıların belirli konumlarının gerekli doğrulukla yerine getirilmesini sağlamalıdır;
4) kuvvet faktörlerinin aktarım koşullarının sınırlandırılması - tasarlanan mekanizmanın basınç açısının mevcut değeri izin verilen değeri aşmamalıdır;
5) mekanizmanın işleyişinin ve işleyişinin özelliklerini dikkate alan diğer koşullar ve gereksinimler.
İLE mekanizmaların sentez yöntemleri analiz yöntemleriyle sentezi içerir
Ve doğrudan sentez yöntemleri (analitik, grafiksel ve grafik-analitik).
Mekanizmaların grafik-analitik yöntemler kullanılarak metrik sentezi belirli bir ölçek faktöründe gerçekleştirilir.
Ölçek faktörü- bu gerçek bir ilişki...
l segmentinin uzunluğuna metre cinsinden alınan, milimetre cinsinden ölçülen ve bu değeri kinematik diyagramın bir parçası olarak gösteren belirli bir l değeri.
Uzunluk ölçeği, herhangi bir değeri milimetre cinsinden gösteren bir parçanın uzunluğunun metre cinsinden gerçek değere oranıdır.
Ölçek, değerleri GOST hükümlerine göre sıkı bir şekilde düzenlenen standart bir miktardır. “Mühendislik Grafikleri” disiplininin hükümlerinden gerçek ölçeğin şu şekilde olduğu bilinmektedir:
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |

2. KOL DİŞLİLERİ
2.3. Kaldıraç mekanizmalarının sentezi
1 × 1 giyiyor ve bir dizi büyütme ölçeği ve küçültme ölçeği var. Ölçek faktörü, ölçeğin tersidir ve standartlaştırılmış bir değer değildir. Ölçek faktörünün değerleri, gerekli sorunların çözümü için belirtilen koşullara ve hedeflere bağlı olarak keyfi olarak alınır.
ul =OA l OA,
burada l OA krankın gerçek uzunluğudur; OA isteğe bağlı bir segmenttir.
2.4. KOL MEKANİZMALARININ KALİTE GÖSTERGELERİ
Metrik sentezin kısıtlamaları ve koşulları, kaldıraç mekanizmalarının kalitesinin değerlendirildiği kalite göstergelerinin değerlerini oluşturur.
Kaldıraç mekanizmalarının niteliksel göstergeleri şunlardır: verimlilik η;
mekanizma stroku H;
ortalama hızın eşitsizlik katsayısı k; basınç açısıϑ; iletim açısıμ.
Yeterlikη boyutsuz bir miktardır, ha-
mekanizma tarafından faydalı olarak kullanılan toplam enerji miktarının karakterize edilmesi. § 1.4'te belirtildiği gibi, hareket dönüşümü sürecine kinematik çiftlerdeki sürtünmenin varlığından kaynaklanan mekanik enerji kayıpları eşlik ettiğinden, mekanizmanın verimliliği her zaman birden azdır. Verimlilik değeri birliğe ne kadar yakınsa kayıplar o kadar düşük olur, dolayısıyla kaldıraç mekanizmasının kalitesi de o kadar yüksek olur.
Düz kol mekanizmalarının çalışma alanı genellikle mekanizmanın stroku adı verilen çıkış bağlantısının hareket aralığı ile değerlendirilir.
Mekanizmanın stroku, çıkış bağlantısının başlangıç ve son konumları arasındaki mesafedir.
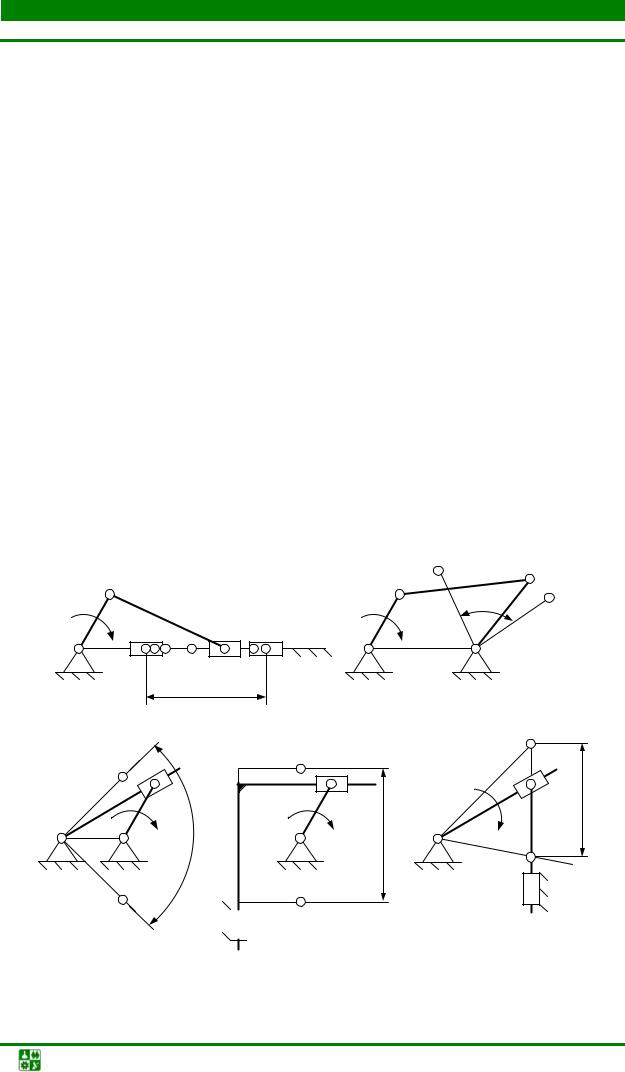
Krank-kaydırıcı (Şekil 2.7, a), sinüs (Şekil 2.7, d) ve teğet (Şekil 2.7, d) mekanizmaları için strok, bu parametrenin tanımına göre ve menteşeli mekanizmalar için hesaplanır (Şekil 2.7). , b) ve rocker ( Şekil 2.7, c) mekanizmalarında, bu parametrenin değeri ifade ile bulunabilir.
Н = ψ l,
Mekanizmalar ve makineler teorisi. Ders Kitabı ödenek |
2. KOL DİŞLİLERİ
2.4.
burada l ,ψ – çıkış bağlantı açıklığının uzunluğu ve açısı, rad.
Külbütör kolu salınım açısı veya külbütör ψ, külbütör kolunun veya külbütörünün başlangıç ve son konumları arasındaki açıdır (Şekil 2.7, b, c).
Düz kol mekanizmalarının çoğu periyodik bir çalışma yapısına sahiptir, yani belirli bir süre sonra mekanizmada meydana gelen tüm işlemler tekrarlanır. Bu durumda herhangi bir mekanizmanın çalışma döngüsü, çalışma ve rölanti aşamalarına bölünür. Güç stroku aşamasında, mekanizmanın servis amacı gerçekleştirilir ve boşta kalma aşamasında, hareket döngüsünün tamamlanması ve bağlantıların çalışma yüzeylerindeki artık gerilimlerin hafifletilmesi amaçlanır. Çalışma ve rölanti vuruşları için harcanan zamanın oranı genellikle ortalama hız eşitsizliği katsayısı kullanılarak değerlendirilir.
Ortalama hız eşitsizliği katsayısı katsayı
rölanti süresi T x.x'in çalışma strok süresi T r.x'e oranının karakterize edilmesi:
T x.x | |||||
burada θ, mekanizmanın en uç konumlarındaki biyel kolunun konumları arasındaki açıdır.
A, B | A, B | A, B |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Pirinç. 2.8. Tipik kaldıraç mekanizmalarının basınç açılarını belirleme şemaları Düz kol mekanizmalarının bağlantıları arasındaki kuvvet faktörlerinin aktarım kalitesini değerlendirmek için basınç açısı ϑ kullanılır. Basınç açısı, aktif kuvvet vektörü Pa arasındaki dar açıdır, önceki bağlantının yanından hareket eden ve uygulama noktasının hız vektörü (Şekil 2.8). Basınç açısının değeri, Q mekanizmasının itici kuvvetinin büyüklüğünü belirleyen, bağlantılar arasındaki kuvvetlerin aktarımı için koşulları oluşturur: Q = P a cos(ϑ ) . İfadenin analizinden, basınç açısının değerindeki bir azalmanın, itici kuvvetin değerinde bir artışa yol açtığı ve buna bağlı olarak basınç açısındaki bir artışın bu kuvveti azalttığı anlaşılmaktadır. Kaldıraç mekanizmalarının çalışması sırasında basınç açısı her zaman ϑ ≤ 90°'dir. Basınç açısı ϑ > 90° olduğunda mekanizmalarda sıkışma veya kendiliğinden frenleme meydana gelebilir. Kendi kendine frenleme veya sıkışma, bir mekanizmanın durumudur. Bağlantıların herhangi bir keyfi büyük itici kuvvet değerinde hareket etmesini imkansız kılan basınç açılarının değerleri eşlik eder. Bu tür durumları ortadan kaldırmak için, mekanizmaları sentezlerken, izin verilen basınç açıları [ϑ ] değerleri, aşağıdaki önerilere göre belirlenir: bağlantıları yalnızca dönme kinematik çiftleri oluşturan mekanizmalar için izin verilen basınç açısı, aralıkta yer alır.
2. KOL DİŞLİLERİ 2.4. Kaldıraç mekanizmalarının niteliksel göstergeleri [ϑ ] = 45− 60° ve dönme ve öteleme kinematik çiftlerinin kombinasyonuna sahip mekanizmalar için, [ϑ ] = 30− 45°. Basınç açısı değerlerinde [ϑ ] = 90°, mekanizma “ölü” konumlardadır, bu durum statikte bağlantıların hareket halindeyken (dinamik) sıkışmasına neden olur; mekanizma bu tür konumların üstesinden gelir. ilave kinetik enerji hacmi. Menteşe mekanizmasının kalitesini değerlendirmek için basınç açısına ek olarak μ iletim açısı kullanılır (Şekil 2.8, b). Aktarım açısı, biyel kolunun eksenleri ile menteşe mekanizmasının külbütör kolunun göreceli konumunu belirleyen açıdır. İletim açıları ve basınç değerleri birbiriyle ilişkilidir: ϑ+μ =90°. İfadenin analizi, basınç açısındaki bir artışın iletim açısında bir azalmaya yol açtığını ve bunun tersine iletim açısı değerlerindeki bir artışın, basınç açısında bir azalmaya yol açtığını göstermektedir. Basınç ve iletim açılarının değerlerinde aynı anda artış veya azalma mümkün değildir. Açılardan biri sıfıra eşit olduğunda ikinci açının değeri maksimuma yani 90°'ye ulaşır.
|
Lider bir bağlantı, kendisine uygulanan dış kuvvetlerin işinin pozitif olduğu bir bağlantıdır, köle– negatif veya sıfıra eşit.
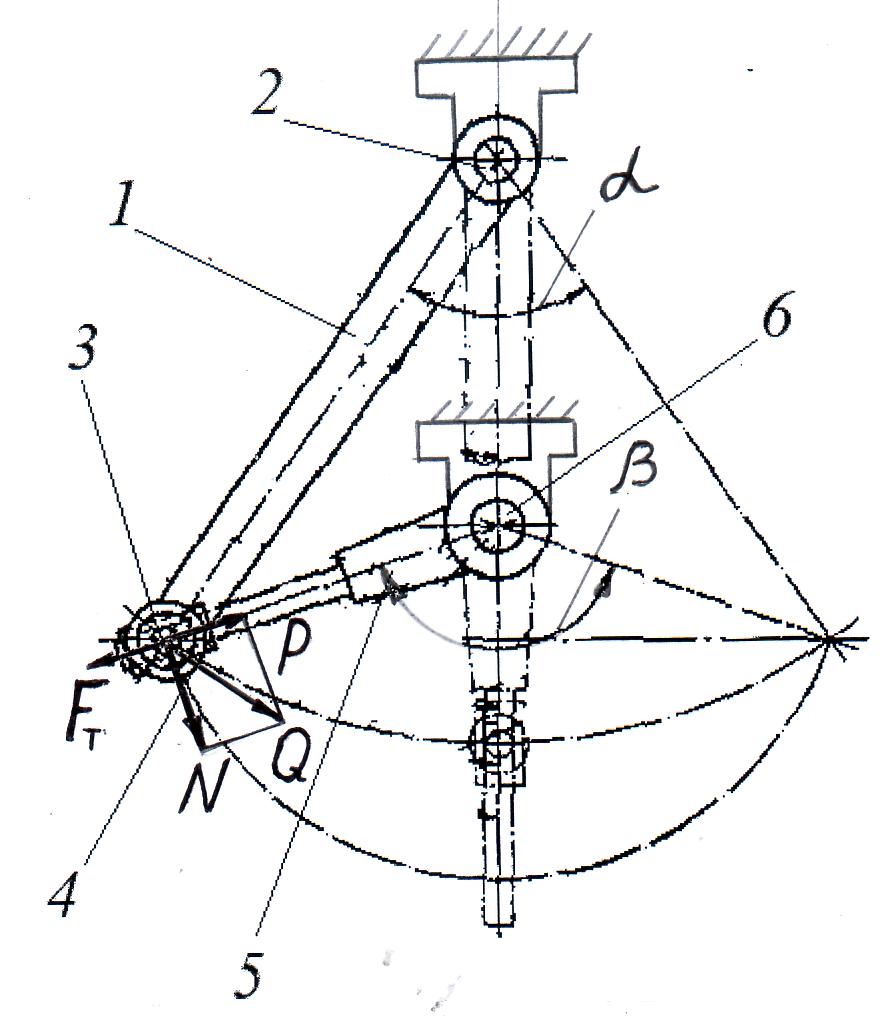
Şek. Şekil 13.2 dört eklemli mekanizmayı göstermektedir. Giriş bağlantısına 1 Bu mekanizmaya bir sürüş momenti uygulanır M D , çıkış bağlantısına 3 - direnç anı M c3. Tasarım aşamasında Şekil 2'deki bağlantıların kütleleri ve atalet momentleri hesaplanmıştır. 13.2 tanımlıdır, bu nedenle tahrik edilen baklaya etki eden itici kuvvet reaksiyondur F 32 çizgi boyunca yönlendirilmiş Güneş , bağlantıdaki uygulama noktasının hızı 3 - V C gönderildi taraf 3 bağlantıya dik 3 . Köşe 32 vektörler arasında F 32 ve V C - dönme çiftindeki basınç açısı İLE . Bu açı arttıkça kuvvetin teğet bileşeni F T 32 , bağlantı rotasyonunu teşvik etmek 3 yönde 3 , azalır ve normal F N 32 , hareketi etkilemez ancak yalnızca bağlantıyı deforme eder (sıkıştırır) 3 , artar. Yani basınç açısının artmasıyla birlikte dişli kutusundaki kuvvetlerin iletilmesi koşulları kötüleşir. Gerçek dişli kutularında her zaman sürtünme olduğundan, dişli kutusundaki basınç açısının belirli bir değerinde, kendi kendine frenleme veya sıkışma mümkündür.
Kendinden kilitleme veya sıkışma- bu, dişli kutularından birinde artan basınç açılarının bir sonucu olarak, tahrik kuvvetinin keyfi olarak büyük bir değeri ile mekanizmanın hareketinin imkansız hale geldiği mekanizmanın bir durumudur. Genellikle kuvvet aktarım koşullarını karakterize etmek için kuvvet artış katsayısı kullanılır (sürtünmeyi hesaba katmadan)
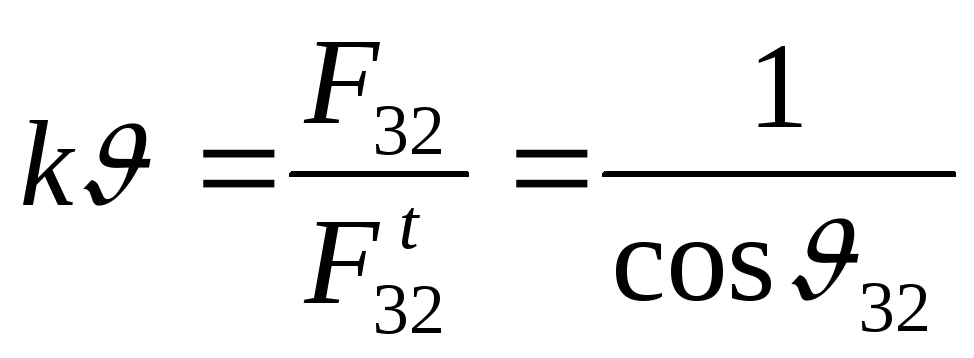
|
|

Gerçek mekanizmalarda her zaman sürtünme olduğu için basınç açılarında sıkışma meydana gelir. < 90 . Hesaplarken kuvvet artış katsayısı belirtilir (örneğin k = 2 ) ve izin verilen basınç açısını belirleyin [ ] . Ön hesaplamalar için yalnızca dönme çiftlerine sahip mekanizmalar için kabul edilir [ ] = 45 - 60 , aşamalı kontrol noktalarının varlığında [ ] = 30 - 45 . Mekanizmanın sözde "ölü" pozisyonlarında basınç açılarının = 90 . Statik koşullarda mekanizma bu konumda sıkışabilir; dinamikte mekanizma, hareketli bağlantıların depoladığı kinetik enerjiyi kullanarak bu konumlar arasında hareket eder.
Ortalama hızın eşitsizliği katsayısı kavramı
Çıkış bağlantısının ortalama hızının eşitsizlik katsayısı k çıkış bağlantısının dönüş strokundaki hareketi sırasındaki ortalama hızlarının oranı denir 3wd oh ve dümdüz 3 çeker
|
|
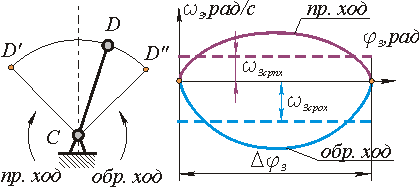
Nerede 

T Ah ve t ph - sırasıyla geri zaman ve ileri zaman.
Çalışma veya ileri stroktaki mekanizmanın çıkış bağlantısı üzerindeki yükün, rölanti veya geri stroktaki yükten çok daha büyük olduğu teknolojik makineler tasarlanırken, ileri stroktaki çıkış bağlantısı hızının daha az olması arzu edilir. tersi olandan daha. Boşta kalma süresini azaltmak için ters strok sırasında hızın da arttırılması gerekir. Bu nedenle, bir mekanizmayı metrik olarak sentezlerken, belirli bir ortalama hız eşitsizliği katsayısını sağlayan bağlantı boyutlarını seçmek genellikle gereklidir.
ALYUSHİN Yu.A.
MENTEŞELİ KOL MEKANİZMALARININ YAPISAL ANALİZİ
(Temel kavramlar ve bağımsız çalışma örneği)
Menteşe-kol mekanizmalarının incelenmesi yapısal, kinematik ve dinamik analizleri içerir. Yapısal analiz, hareketli bağlantıların ve kinematik çiftlerin (KP) sayısının belirlenmesini, bunların sınıflandırılmasını, bir düzlem ve mekansal mekanizma için serbestlik derecesi sayısının belirlenmesini, gereksiz bağlantıların ortadan kaldırılmasını (uzamsal gruplar için) ve yapının Assur'a göre "rasyonelleştirilmesini" içerir. Yedekli mobiliteye sahip devrelerin olası çeşitlerinin enerji yorumuyla. Bir mekanizmanın yapısı, işlevsel olarak ilgili eleman kümeleri (bağlantılar, bağlantı grupları veya standart mekanizmalar) ve bunlar arasındaki ilişkiler (hareketli dişli kutuları veya sabit bağlantılar) tarafından belirlenir. Mekanizmanın bağlantılar, dişli kutuları ve yapısal gruplar düzeyindeki yapısı, bu elemanları birbirine bağlayan kinematik çiftlerin türü hakkında ek bilgilerle kinematik olandan farklı olan yapısal şemasında gösterilmektedir.
1. Yapısal analizin temel kavramları.
1.1. Mekanizmanın hareketliliği (serbestlik derecesi sayısı) - mekanizmanın diğer tüm bağlantılarının (bir düzlemde veya uzayda) konumunu benzersiz bir şekilde belirleyen önde gelen bağlantıların sayısı (bağımsız genelleştirilmiş koordinatlar). 1.2. Yerel hareketlilik - gerekli sayıda tahrik bağlantısını etkilemeyen, ancak bağlantıların başka amaçlar için olası yer değiştirmelerine izin veren mekanizmanın bireysel bağlantılarının hareketliliği, örneğin, kam mekanizmasındaki iticiye eksenel olarak bağlanan bir silindirin dönüşü, izin verir kayma sürtünmesinin kam yüzeyindeki yuvarlanma sürtünmesiyle değiştirilmesi.1.3. Bağlantı - Bir vücudun hareketine uygulanan kısıtlama (mekanizma bağlantısı).
1.4. Assur yapısal grupları. Herhangi bir mekanizma, bir veya daha fazla iki bağlantılı (birincil) mekanizmanın ve bir veya daha fazla Assur grubunun kombinasyonu olarak temsil edilebilir. Assur yapısal grupları, hareketliliği (düzlemde) sıfır olan bir mekanizmanın yalnızca hareketli parçaları tarafından oluşturulan kinematik zincirlerdir. Assur grubunun yapısal formülüBuradan
![]() ,
,
Nerede  bağlantı sayısı;
bağlantı sayısı;  – yapısal gruptaki daha düşük CP'lerin sayısı. Tüm sayıların tamsayı olması gerektiğinden, yapısal bir gruptaki bağlantıların sayısı her zaman çift olmalı ve düşük CP'lerin sayısı 3'ün katı olmalıdır. 1.4.1. Assur Grubu
– sıfır hareketliliğe sahip düz kinematik zincirler. 1.4.2.
Sınıf
Assur yapısal grubu, oluşturulan kapalı bir döngüde yer alan kinematik çiftlerin sayısıdır. dahili
Grubun kinematik çiftleri. 1.4.3.
Emir
Assur grubu standa, başlangıç mekanizmasına veya diğer gruplara bağlanacağı kinematik çiftlerin sayısını belirler. 1.4.4.
Tasmalar
Assur yapısal gruplarına bu grubun bağlı olduğu mekanizma elemanlarının analogları denir. Genellikle serbest CP'lerden uzanan noktalı çizgilerle gösterilirler (bkz. Şekil 1). Bu kavram göz önüne alındığında emir grup sayıyı belirler tasmalar standa, başlangıç mekanizmasına veya diğer Assur gruplarına takıldığı.
– yapısal gruptaki daha düşük CP'lerin sayısı. Tüm sayıların tamsayı olması gerektiğinden, yapısal bir gruptaki bağlantıların sayısı her zaman çift olmalı ve düşük CP'lerin sayısı 3'ün katı olmalıdır. 1.4.1. Assur Grubu
– sıfır hareketliliğe sahip düz kinematik zincirler. 1.4.2.
Sınıf
Assur yapısal grubu, oluşturulan kapalı bir döngüde yer alan kinematik çiftlerin sayısıdır. dahili
Grubun kinematik çiftleri. 1.4.3.
Emir
Assur grubu standa, başlangıç mekanizmasına veya diğer gruplara bağlanacağı kinematik çiftlerin sayısını belirler. 1.4.4.
Tasmalar
Assur yapısal gruplarına bu grubun bağlı olduğu mekanizma elemanlarının analogları denir. Genellikle serbest CP'lerden uzanan noktalı çizgilerle gösterilirler (bkz. Şekil 1). Bu kavram göz önüne alındığında emir grup sayıyı belirler tasmalar standa, başlangıç mekanizmasına veya diğer Assur gruplarına takıldığı. 
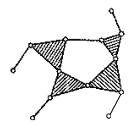
Pirinç. 1. Çift başlı grupları güvence altına alın.
Tablo 1 Assur yapısal grupları II-VI sınıflarının örneklerini göstermektedir. Serbest kinematik çiftler, Şekil 2'de olduğu gibi, giden uçlarla (noktalı çizgiler) işaretlenmiştir. 1.
Tablo 1.
| Grup | Emir |
|||
| II sınıf | ||||
| III sınıf |
|
|||
| IV sınıf | ||||
| V sınıf |
|
| ||
| VI sınıf |
|
| ||



2. Altı bağlantılı mekanizmanın yapısal analizinin gerçekleştirilmesine bir örnek, kinematik diyagramı Şekil 2'de gösterilmektedir. 2.
Pirinç. 2. Mekanizmanın kinematik diyagramı
2.1. Sabit bağlantıyı seçme– A ve D menteşelerinin sabit eksenlerinin ve sürgü kılavuzlarının sabitlendiği raf “0”. 2.2. Biz numaralıyoruz(Arap rakamları) Hareketli parçaları sınıflandırınız. Sonraki dinamik analizin kolaylığı için, bağlantıların enerji kaynağından (öncü bağlantı) en uzaktaki tüketicilere kadar sırayla numaralandırılması tavsiye edilir. Söz konusu mekanizmada beş hareketli bağlantı bulunmaktadır: bağlantı 1 - krank, 360 0 tam dönüşle dönme hareketi yapar; 2 ve 4 - bağlantı çubukları, hareketli eksenlere göre dönüşle düzlemsel paralel hareket gerçekleştirir (MCS'nin konumu zamanla değişir); bağlantı 3 – külbütör kolu, sabit D eksenine göre salınım hareketi gerçekleştirir; bağlantı 5 - kaydırıcı, sabit kılavuzlar boyunca ileri geri hareket gerçekleştirir. 2.3. Kinematik çiftleri sınıflandırıyoruz Bitişik bağlantıların göreceli hareketini belirleyen (KP). Bazı ders kitaplarında kinematik çiftler Romen rakamlarıyla numaralandırılmıştır; örneğin Şekil 2, 3 ve 5'te I, II, III, IV, V, VI ve VII. Ancak, daha düşük hata olasılığıyla, KP sınıflandırmasını, Romen rakamı yerine, karşılık gelen kinematik çiftlerle bağlanan bitişik bağlantıları gösteren endeksli büyük Latin harflerinin kullanıldığı Tablo 2 biçiminde sunun.Tablo 2.
| Bitişik bağlantıların sayısı | Dijital KP kodu | Kontrol paneli tipi | Şekil 2'deki atama 2, a, 2, b ve metinde |
|
| 2&4 (veya 3&4) | C 24 (veya C 34) |
|||
Nerede N- hareketli parça sayısı ( N = 5), P 1
- aynı hareketliliğe sahip daha düşük kinematik çiftlerin sayısı ( P 1
=7
). Mekanizmada daha yüksek (düzlemde iki hareketli) kinematik çift yoktur, P 2
=0
. Mekanizmanın toplam serbestlik derecesi sayısı 1'dir, yani mekanizmanın çalışması için AB krank olarak kullanılabilen bir tahrik bağlantısı yeterlidir. 2.5. Assur yapısal gruplarını belirliyoruz. Assur yapısal gruplarını tanımlamak için (serbestlik derecesi sayısı W = 0 ile), ana bağlantıdan en uzakta olandan başlayarak mekanizmayı en basit modüllere böleriz. Bundan önce, kinematik diyagramlarda (bkz. Şekil 2) birleştirilmiş çiftlerin bir noktada, özellikle 2, 3 ve 4 numaralı bağlantılar arasında, örneğin Şekil 2'de gösterildiği gibi ayrı ayrı görüntülenmesi tavsiye edilir. 3, a veya Şekil 2'de. 3, b. Genel olarak konuşursak, bu iki şema, hem 4 ve 5 numaralı bağlantıların kinematiğinde (2, 3 ve 4 numaralı bağlantıları bağlayan menteşelerin eksenleri uzayda hizalanmamışsa) hem de kinematik aracılığıyla iletilen kuvvetlerde farklılık gösteren farklı mekanizmalara karşılık gelir. Bağlantılar 2 ve 3 arasındaki çiftler. Belirtilen bağlantıları bağlayan dönme kinematik çiftlerinin eksenlerini birleştirirsek, kinematik koşullar açık bir şekilde belirlenecektir, ancak iletilen kuvvetler, katılmayan pasif kuvvetlerin ortaya çıkması nedeniyle değişebilir. Zamanın her anında bu eksenlerin hareket hızına dik olarak yönlendirilmeleri nedeniyle bağlı bitişik bağlantılar arasında güç aktarımı (dik vektörlerin skaler çarpımı 0'a eşittir!). 

Pirinç. 3. Mekanizmanın olası kinematik şemaları.
Şekil 2'deki kinematik diyagramlar. Şekil 3'te, biyel kolu 2 veya külbütör kolunun 3 sert üçgen biçimindeki görüntüsü, sınıf 3 olarak sınıflandırılırsa (en karmaşık kapalı konturun kenar sayısına göre) ve siparişe göre mekanizmanın sınıflandırılmasında bir hataya yol açabilir. 3 (grubu ana bağlantıya (başlangıç mekanizması) ve standa bağlayan uç sayısına göre. Hataları önlemek için mekanizmayı ikiye ayırmak gerekir) tek hücreli hayvan bağlantısının kesilmesi mekanizmanın geri kalan kısmının çalışmasını aksatmayan modüller. Bu nedenle seçim, Şekil 2'de gösterilen sınıf 1'in iki uçlu Assur grupları ile başlamalıdır. 1. En uzak Assur grubu, üç kinematik çiftli bağlantı çubuğu (4) ve kaydırıcının (5) kullanılmasıyla oluşturulur: Şekil 2'deki C 24, E 45, 5&0. Şekil 3, a veya C 34, E 45, 5&0. 3, b, bunların iki kinematik çifti “1c” tipine ve bir tanesi “1p” tipine (5&0) aittir. S 24 ve 5&0 (Şekil 3, a) veya S 34 ve 5&0 (Şekil 3, b) dişli kutusundaki kablolar, bu Assur yapısal grubunu (GDP tipi) biyel kolu 2'ye (Şekil 3'teki külbütör kolu 3) bağlar. b) ve payanda 0. Geriye kalan kısmın (bağlantılar 1, 2 ve 3) serbestlik derecesi sayısı (hareketlilik derecesi) eşit kalır K= 1, orijinal mekanizmadaki gibi. Bu, ilk yapısal grubun doğru şekilde tanımlandığını doğrular. Daha sonra, ikinci grubu (bağlantı 2 ve 3) “1v” tipi üç kinematik çiftle (B 12, C 23, D 03, VBB tipi Assur yapısal grubu) ayırıyoruz. Bundan sonra kalan kısmın hareketlilik derecesi (A 01 kinematik çiftine sahip başlangıç mekanizması) W = 1'e eşit kalır. Şek. Şekil 4 Assur gruplarını ayrı ayrı göstermektedir. Şekil 2'deki her grup için noktalı oklar. Şekil 4, tahrik bağlantısı 1'i ("başlangıç mekanizması") ve rafı 0 içeren mekanizmanın geri kalanına grupların bağlandığı "uçları" göstermektedir. Ayrıca, bu tür bir bağlantı, bir kinematik çiftin eklenmesiyle varsayılmaktadır. Ekli Assur grubuna ait, hareket etmek ve teknolojik bir işlem gerçekleştirmek için enerji alacağı rafın veya donör mekanizmanın gövdesine.
![]()
![]()
Pirinç. 4. Assur'un yapısal grupları. Artobolevsky I.I.'ye göre. Bir grubun sınıfı, grubun en karmaşık kapalı konturunu oluşturan kinematik çiftlerin sayısına göre belirlenir. Grubun sırası, grubun başlangıç mekanizmasına ve rafa bağlanabileceği kinematik çiftlerin serbest elemanlarının sayısına göre belirlenir. Her iki ayrılabilir yapısal grup da 2. dereceye aittir ve 1 sınıf, tüm mekanizma aynı sınıfa aittir. 2.6. Gereksiz bağlantıları ortadan kaldırın. Bağlantıların düzlemsel paralel hareketi varsayımı ideal bir mekanizma ile ilgili olduğundan ve gerçekte elemanların imalatındaki yanlışlıktan dolayı, öncelikle bağlantıların hareket düzlemi eksenlerinin dik olmaması ve bağlantıların düzgün olmaması nedeniyle -dönme kinematik çiftlerinin eksenlerinin paralelliği, mekanizma uzaysal bir mekanizmaya dönüştürülür, gerçek bir mekanizma için serbestlik derecesi sayısı Malyshev formülüne göre hesaplanmalıdır. Tablo 2'deki kinematik çiftleri hesaba katarak şunu elde ederiz: Mekanizmanın 6 yedek bağlantısı vardır ve bunlar, düşük kinematik çiftlerin daha yüksek olanlarla değiştirilmesiyle ortadan kaldırılabilir. Enerji akışları açısından Şekil 1'deki daha çok tercih edilen şema için. 3'te ve gereksiz bağlantıları ortadan kaldırma seçeneklerinden biri Tablo 3 ve Şekil 2'de gösterilmektedir. 5.
Tablo 3.
| Bitişik bağlantıların sayısı | PPD için dişli kutusu tipi | Uzamsal kontrol paneli türü hareket | Şekil 2'deki atama 2a ve 2b |
|
İnsan varlığının bir biçimi olarak kültürün önemini anlayabilen ve faaliyetlerinde modern hoşgörü ilkelerine göre hareket edebilen,
Ürün Açıklaması
Kol mekanizmaları. Bölüm 1
Kaldıraç mekanizmaları, dönme, öteleme veya düzlemsel paralel hareket gerçekleştiren bağlantılardan oluşan mekanizmaları içerir. Bu mekanizmalar basitlikleri, yüksek verimlilikleri ve yüksek yük kapasiteleri ile ayırt edilirler, ancak tahrik edilen bağlantının herhangi bir hareket yasasını sağlayamazlar, bu da onların teknolojideki kullanımını bir dereceye kadar sınırlar.
Aşağıdaki kaldıraç mekanizmaları teknolojik ekipmanlarda yaygın olarak kullanılmaktadır: dört çubuklu menteşe mekanizmaları, krank mekanizmaları, külbütör mekanizmaları. Kol mekanizmalarının örneklerine ve tasarım özelliklerine bakalım.
Dört çubuklu mafsallı mekanizmalar
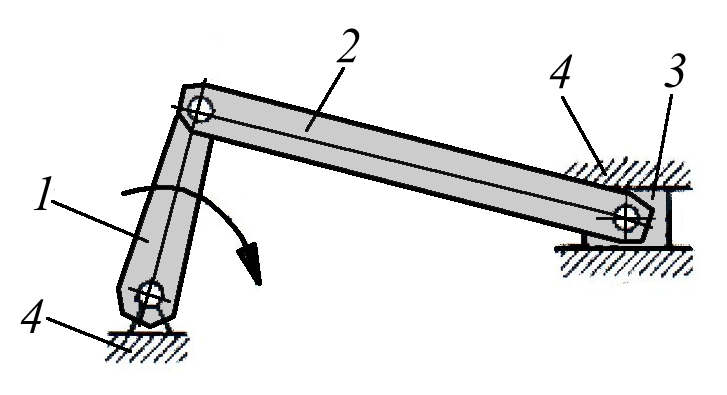
Menteşeli dört çubuklu mekanizmalar sırasıyla üç türe ayrılır: tahrik eden ve tahrik edilen bağlantının tam bir dönüş yapabildiği çift krank (bkz. Şekil 1a), tahrik bağlantısının, tahrik bağlantısının olduğu krank-külbütör. krank döner ve tahrik edilen külbütör bir sallanma hareketi yapar (bkz. Şekil 1b) ve hem tahrik eden hem de tahrik edilen baklaların bir sallanma hareketi gerçekleştirdiği iki külbütör kolu (bkz. Şekil 1c).
İki kranklı mekanizmanın bir örneği, uzun bir açısal çelik parçasını raftan teknolojik ekipmanın makaralı konveyörüne aktarma mekanizmasıdır; tasarım diyagramı Şekil 2'de gösterilmiştir. 2. Şaftlar (3) üzerine monte edilmiş ve dört kızak (4) ile eksenler (5) aracılığıyla birbirine menteşeli olarak bağlanan iki dört ışınlı dişliden (1 ve 2) oluşur; aktarma sırasında iş parçasının (6) içine yerleştirildiği ve böylece dört adet iki krank oluşturduğu mekanizmalar. Bu durumda, kaymalı yataklar üzerindeki miller (3), braketler (9) aracılığıyla ortak bir çerçeveye (10) monte edilen mahfazalara (7 ve 8) yerleştirilir.

Dört çubuklu mafsallı mekanizmaların bir başka temsilcisi, kural olarak tahrik edilen külbütör kolunun salınım açısını değiştirmek (artırmak, azaltmak) veya üzerinde oluşturulan kuvveti değiştirmek için kullanılan çift külbütör mekanizmalarıdır (bkz. Şekil 3). .
Şek. 3 A tasarımı (uzunluk oranı ve külbütör kolları 1 ve 3'ün göreceli konumu) salınım açısını artırmanıza izin veren çift külbütör mekanizmasını gösterir β α öndeki külbütör kolu 1. Şek. 3 B tasarımı (uzunluk oranı ve külbütör kollarının (1 ve 3) göreceli konumu) salınım açısının azaltılmasını mümkün kılan bir çift külbütör mekanizması gösterilmektedir. β salınım açısına göre tahrikli külbütör kolu 3 α ön külbütör kolu 1. Şekil 2'de gösterilen mekanizmada ise. 3 A, ön bağlantı, tam bir devirle dönen bağlantı 3 olacak ve Şekil 2'de gösterilen mekanizmada olacaktır. 3 B, tahrik bağlantısı 1 tam bir devrim yapacak, ardından bu çift külbütör mekanizmaları krank külbütör mekanizmalarına dönüşecektir. Bu mekanizmalar nadiren makine ve ekipmanların güç aktüatörleri olarak kullanılır, çünkü tahrik baklasından tahrik edilen baklaya kuvvet aktarırken artan kayıp miktarı nedeniyle yalnızca sınırlı bir dönüş açısında (60 - 90 derece) çalışabilirler. krank dönüş açıları. Bu tür mekanizmalar genellikle düşük hızlarda ve yüklerde çalışan yardımcı mekanizmalar olarak kullanılır. Bu tip mekanizma genellikle çeşitli tipteki tilterlerde aktüatör olarak kullanılır.
 Pirinç. 4. Kalıplama makinesinin tablasını eğmek için bir eğimleyici.
Pirinç. 4. Kalıplama makinesinin tablasını eğmek için bir eğimleyici.
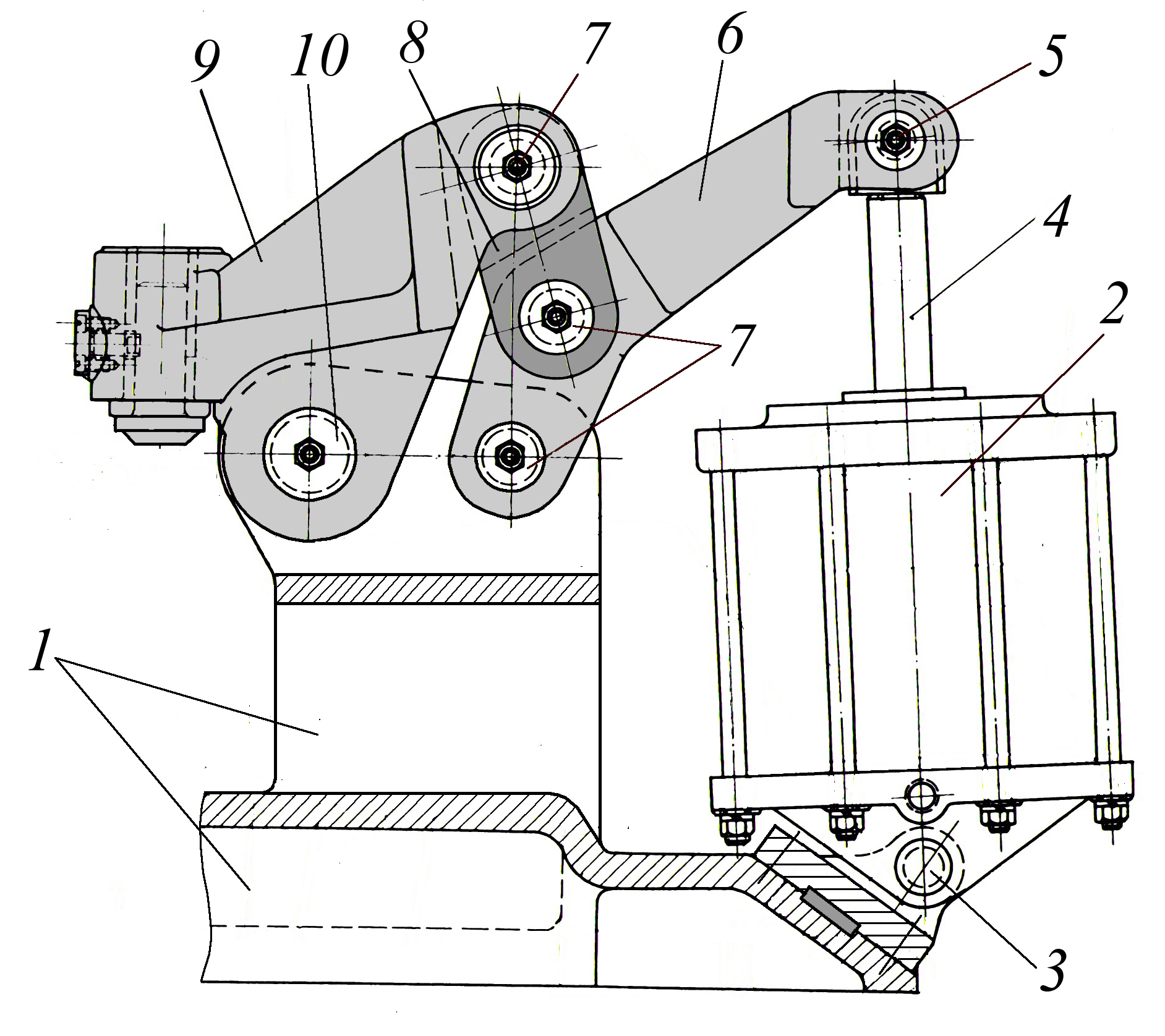
Şek. Şekil 4, mafsallı dört çubuklu tasarıma göre yapılmış, çerçeve (1) üzerindeki kayan yataklar (2) üzerine monte edilen tahrik mili (3) üzerine sağlam bir şekilde monte edilmiş bir tahrik külbütör kolundan (6) oluşan tiltleyicinin aktüatör mekanizmasını göstermektedir ve bir tahrikli bir eksen (5) ve bir kayan yatak (4) aracılığıyla çerçeveye (1) menteşeli bir şekilde monte edilen külbütör kolu (7), bu durumda çubukların (6 ve 7) karşıt uçları, eksenler (8 ve 9) aracılığıyla biyel koluna (10) eksenel olarak bağlanır, üzerinde enine bir kirişe (11) sahip iki rafın (8) sağlam bir şekilde sabitlendiği Tahrik mili (3) saat yönünde döndüğünde (eğim aktüatörünün tahriki gösterilmemiştir), öndeki külbütör kolu (6) da aynı yönde döner ve onunla birlikte. dört çubuklu menteşenin mekanizması. Salınım eksenlerinin seçimi ve külbütör kollarının (6 ve 7) uzunlukları Şekil 2'de gösterilmektedir. Şekil 4, döndürüldüğünde platformun (11) belirli bir açıda döndürülmesine olanak tanır ve bu, özellikle kalıplama makinesinin tablasının eğilmesi için kullanılır. 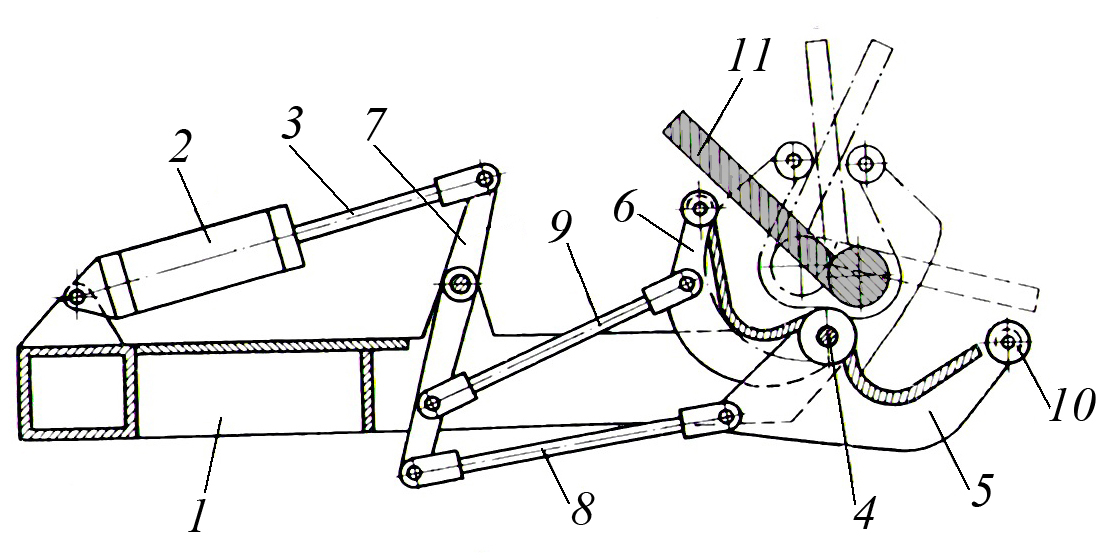
Pirinç. Şekil 5 Döner çeneleri mafsallı dört çubuklu külbütör kollarıyla tahrik edilen bir kaynak konumlandırıcının tasarımı
Şekil 5 kaynak konumlayıcının, dönen çenelerin tasarımını göstermektedir
ortak bir tahrikli külbütör koluna sahip mafsallı dört baklalı tahrikli külbütör kollarıdır. Çerçeve (1) üzerine monte edilmiş bir tahrik pnömatik silindiri (2) içerir; bunun çubuğu (3), çift kollu bir manivela (7) aracılığıyla sağlanır; tahrik edilen kolu, çubukları (8) içeren iki mafsallı dört bağlantının ön külbütör koludur. ve 9, bu dört baklanın külbütör kolları tarafından tahrik edilen, ortak bir eksen (4) üzerine monte edilmiş döner çenelere (5 ve 6) eksensel olarak bağlanmıştır.
Titreşim şu şekilde çalışır. Ürünün (11) ilk dikişinin kaynağının tamamlanmasından sonra, kaynaklı ürünü (11) bir çerçeveye monte ederken, çubuğu (3) geri çekilen ve döner çeneleri (5 ve 6) bir araya getiren pnömatik silindiri (2) açma komutu verilir. dikey konum (şu anda destek silindirleri 10 ürünün rafı boyunca yuvarlanır). Bunun bir sonucu olarak, kaynaklı ürünün (11) ağırlık merkezi, destek prizmasının (Şekil 5'te gösterilmemiştir) karşı tarafına doğru hareket eder ve çubuk (3) açıldığında meydana gelen kolların (5 ve 6) müteakip açılmasıyla birlikte hareket eder. Pnömatik silindirin (2) uzatılmasıyla ürün, ikinci dikişin kaynaklanması için uygun bir konuma yerleştirilir.
Şekil 6 İki mafsallı dört çubuk içeren bir freze merkezi makinesinin sıkıştırma mekanizmasının tasarımı.
Şekil 6, iki mafsallı dört çubuk içeren, önde gelen bağlantısı üç kollu bir kaldıraç olan ve ikincisinin ön kolu tahrik çubuğuna bağlı olan bir freze merkezi makinesinin sıkıştırma mekanizmasının tasarımını göstermektedir. Pnömatik silindir ve dört çubuğun tahrikli külbütör kolları, kademeli olarak hareket eden sıkıştırma prizmalarına bağlanır. Makinenin çerçevesi (1) üzerine monte edilmiş bir mahfaza (4) içerir; burada bir çubuk (6) ile bir tahrik pnömatik silindiri (5), bir eksen (2) ve bir braket (3) aracılığıyla menteşeli olarak monte edilir; ikincisi bir çubuk (19) ve üç kollu bir braket kullanır kol (7), ara çubuklar (8 ve 10) ve iki kollu kollar (9 ve 11), mahfazanın (4) kılavuzlarına (14 ve 15) monte edilen sürgülere (12 ve 13) dönebilir şekilde bağlanır. Sürgüler (12 ve 13) üzerinde, prizmalar (16) ve 17 sabit olup aralarına taban kızağı (23) monte edilmiştir.
Sıkıştırma mekanizması aşağıdaki gibi çalışır. Taban kızağına (23) önceden monte edilmiş iş parçasını (kesilecek ve ortalanacak şaft) kelepçelemek için, pnömatik silindirin (5) çubuk boşluğuna basınçlı hava verilirken, çubuğu (6) üç kollu kolu (7) geri çeker ve saat yönünde döndürür. ara çubuklar (8 ve 10) aracılığıyla, çift kollu kollar (9 ve 11) sürgüleri (12 ve 13) kendilerine bağlı prizmalarla (16 ve 17) bir araya getirerek iş parçasını (18) sıkıştırır. İşlenen iş parçasını serbest bırakmak için basınçlı hava sağlanır. Pnömatik silindirin (5) piston boşluğuna, çubuğu (6) çubuk (19) boyunca uzanır ve kaldıraç mekanizması, işlenmiş iş parçasını serbest bırakırken, sürgüleri (12 ve 13) prizmalarla (16 ve 17) orijinal konumlarına döndürür.
Şekil 7 Masaüstü presin aktüatörünün tasarımı.
Şekil 7, aktüatörü çift külbütörlü bir mekanizma olan, pnömomekanik tahrikli bir masa üstü presin tasarımını göstermektedir. Bir eksen (3) aracılığıyla çerçeveye (1) menteşeli olarak monte edilmiş bir güç pnömatik silindiri (2) içerir; bunun çubuğu (4) ayrıca bir eksen (5) aracılığıyla bir külbütör koluna (6) dönebilir şekilde bağlanır ve ikincisi eksenler (7) kullanılarak bir çubuğa (8) dönebilir şekilde bağlanır. bu da bir eksen (7) aracılığıyla çerçeveye (1) bir eksen (10) kullanılarak monte edilen çift kollu bir kola (9) bağlanır. Pnömatik bir silindir tarafından çalıştırılan aktüatörün bu tasarımı, küçük boyutlu bir masa üstü pres oluşturmayı mümkün kılar. önemli kuvvetler geliştirme yeteneğine sahip.
Pirinç. 8. Konveyör kargo süspansiyonunun tasarımı esas alınarak yapılmıştır
mafsallı dört çubuk
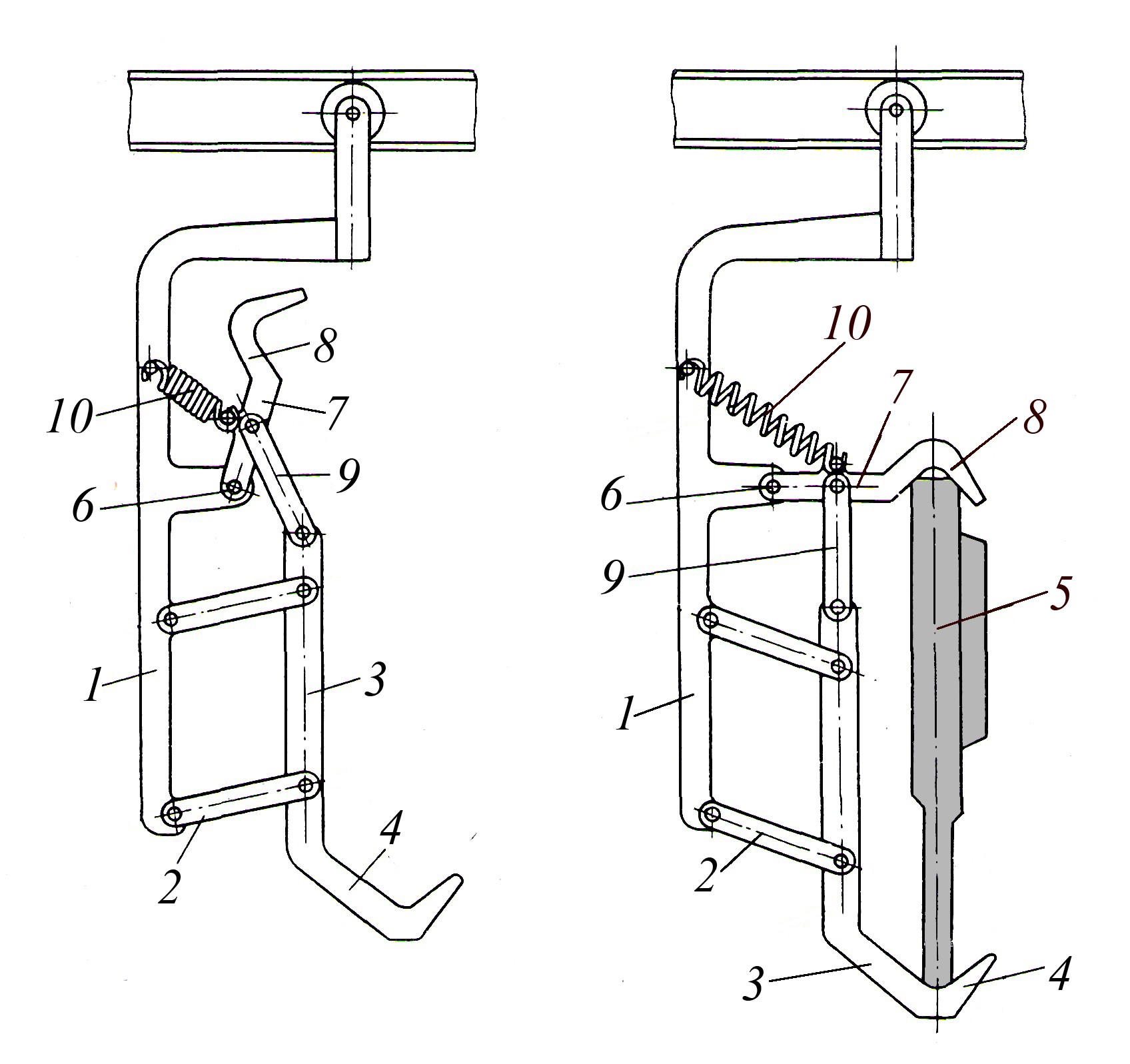
Şek. Şekil 8, aktüatörü dört çubuklu bir menteşe içeren konveyör kargo süspansiyonunun tasarımını göstermektedir. Bu tasarım, taşınan parçanın basit ve güvenilir bir şekilde sabitlenmesini ve sıkıştırılmasını, ayrıca kurulumunu ve boşaltılmasını sağlar. Konveyör taşıyıcısına monte edilmiş ve iki eşit uzunlukta külbütör kolu (2) kullanılarak ona bağlanan sabit bir stand (1), taşınan parçanın (5) montajı için yük taşıma rafına (4) sahip bir çubuk (3) ve ayrıca bir manivela (7) içerir. bir eksen (6) aracılığıyla sabit standa (1) eksenel olarak bağlanan bir basınç rafı (8) ve bir çubuk (9) aracılığıyla çubuğa (3) eksenel olarak bağlanır. Bu durumda, sabit direk arasına bir uzatma yayı (10) monte edilir 1 ve kol 7.
Süspansiyon aşağıdaki gibi çalışır. Başlangıç konumunda, yük taşıma rafına (4) sahip çubuk (3) ve basınç rafına (8) sahip kol (7) üst konumdadır ve parçanın (5) süspansiyon üzerine montajına müdahale etmez. Bu konumda, parça 5, yük taşıma rafına (4) monte edilirken, ağırlığının etkisi altında, yayın (10) kuvvetinin üstesinden gelen kol (7), çubuk (9) ve çubuk (3) aşağı indirilir. Sıkıştırma rafı (8), çubuğun (3) külbütör kolları (2) ile bağlantı noktasından daha büyük bir yarıçap boyunca döndüğünden, aynı zamanda yük taşıma çatalından (4) daha büyük bir mesafe kat edecek, böylece parça (5) bastırılacaktır sıkıştırma rafı 8 tarafından yük taşıma rafına 4. Parçaları boşaltmak için, yük taşıma rafının 4 ve baskı rafının 8 strok miktarı kadar yayın (10) hareketi altında kolla (7) birlikte yukarı kaldırılır. üst başlangıç pozisyonuna getirin ve böylece parçayı serbest bırakın.
Krank mekanizmaları
Tüm kaldıraç mekanizmaları arasında krank mekanizmaları, kinematiğin basitliği nedeniyle teknolojide en yaygın olanıdır; bu, dönme hareketini öteleme hareketine dönüştürmeyi nispeten kolaylaştırır, bu da bunların teknolojik ekipmanın aktüatörlerinde, örneğin mekanik preslerde kullanılmasına olanak tanır. ve öteleme hareketini dönme hareketine dönüştürür, bu da bunların içten yanmalı bir motorun aktüatörü olarak kullanılmasına olanak tanır. Krank mekanizması, dönme olasılığı (krank veya eksantrik mil) ile çerçeveye monte edilmiş bir kranktan (1), krank (1) döndüğünde, kaydırıcıya (3) eksenel olarak bağlanan, ona eksensel olarak bağlanan bir bağlantı çubuğundan (2) oluşur. çerçevenin (4) kılavuzlarında ileri geri hareket eder (bkz. Şekil 9).
Pirinç. 9. Krank mekanizması.
Şek. Şekil 10, dört eksantrik bir krank mili (1) ve her biri bir biyel kolu (2) içeren dört piston grubundan (Şekil 10 geleneksel olarak bir piston grubunu gösterir) oluşan dört silindirli bir içten yanmalı motorun krank kolu mekanizmasını gösterir. karşılık gelen silindirin astarına karıştırılan piston 3.
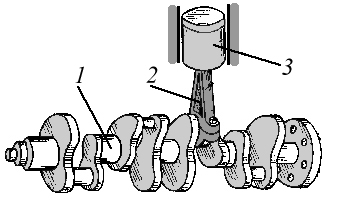
Pirinç. 10. Krank mekanizması
içten yanmalı motor.
Bir dizi makine ve ekipmanın tasarımı, büyük bir kaydırıcı vuruşunun ve vuruşun sonunda büyük bir kuvvetin oluşturulmasını gerektirir. Bu durumda, bir krank ve biyel kolu grubunu da içeren diz-kol mekanizmaları kullanılır (bkz. Şekil 11). Böyle bir mekanizma, tahrik miline (2) monte edilmiş, çerçevenin yataklarında dönen bir krank (1), bir tahrik biyel kolu (4), bir külbütör kolu (6), tahrikli bir biyel kolu (7) ve çerçevenin (11) kılavuzlarında hareket eden bir kaydırıcıyı (10) içerir. Külbütör kolu (6) bir eksen (8) aracılığıyla eksenel olarak çerçeveye bağlanır ve tahrik edilen bağlantı çubuğu (7) eksen (9) aracılığıyla kaydırıcıya (10) bağlanır (bkz. Şekil 11a). Böyle bir mekanizmanın çıkış bağlantısı, aşamalı olarak hareket eden bir kaydırıcı olmayabilir, ancak eksen (9) aracılığıyla tahrik edilen bağlantı çubuğuna (7) ve eksen (11) aracılığıyla çerçeveye eksenel olarak bağlanan bir sallanan bağlantı (10) olabilir (bkz. Şekil 11b).
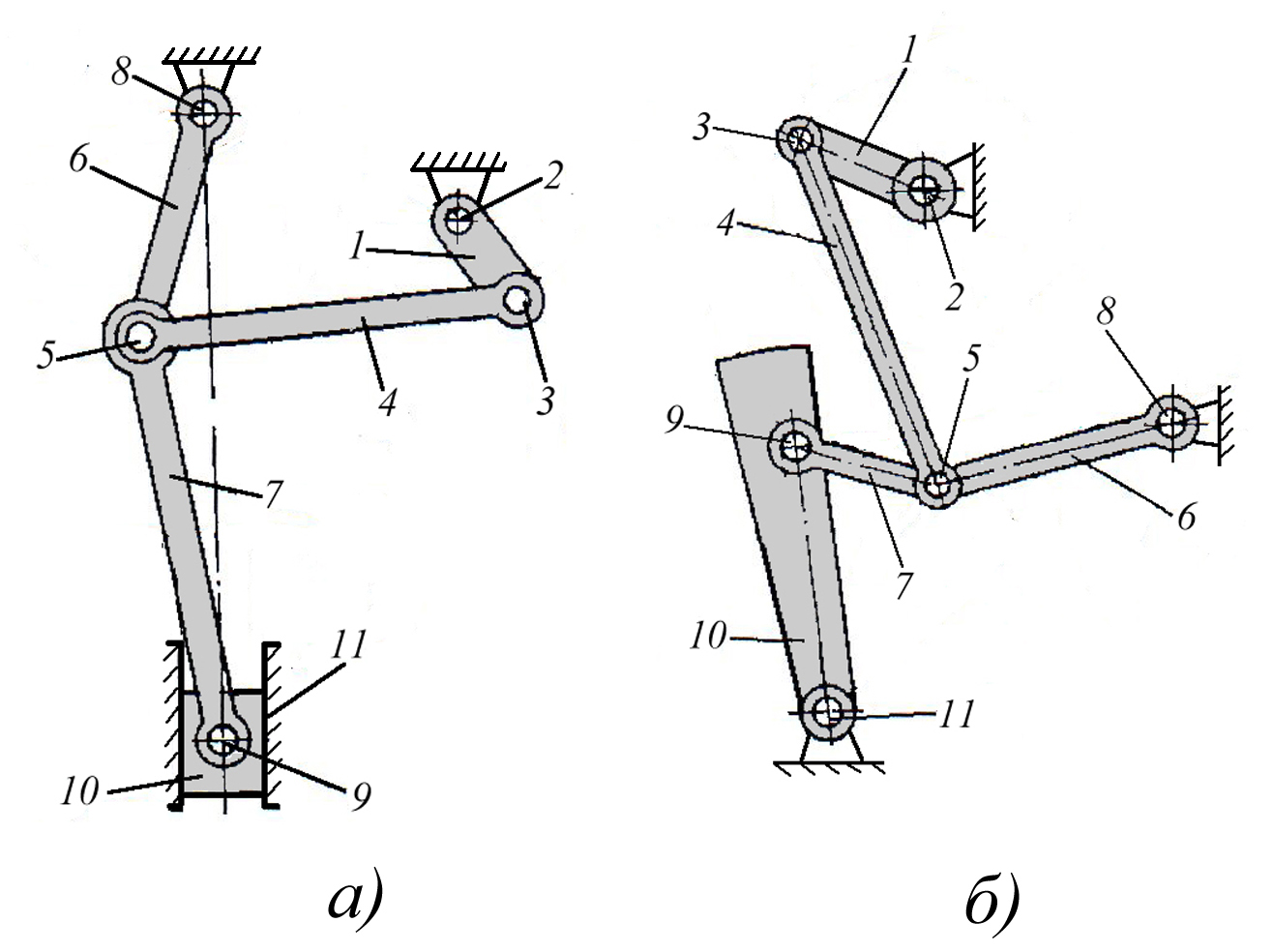
Pirinç. 11. Büyük bir kaydırıcı stroku ve strok sonunda kaydırıcıya kuvvet uygulayan krank mekanizmaları.
Külbütör kolları, kollar ve çubuklar sistemi ile birlikte krank mekanizması, farklı strok boyutları, hızları ve çıkış bağlantısının strok sayısını (genellikle bir dizi makinenin çalışmasında gerekli olan kaydırıcı) elde etmenizi sağlar ve teçhizat.
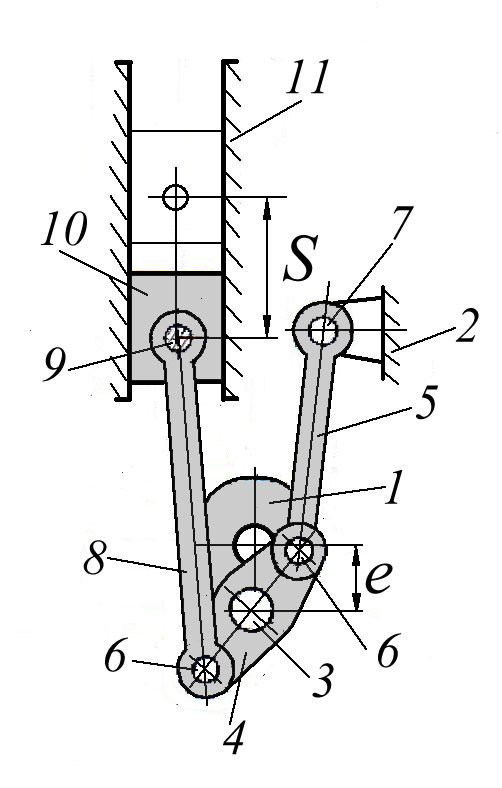
Pirinç. 12. Krank mekanizmasının, krank milinin eksantrikliğine kıyasla iki kat sürgü stroku ile tasarımı.
Şek. Şekil 12, kaydırıcının çift stroklu krank çubuğu mekanizmasının tasarım diyagramını göstermektedir S krank mili eksantriklik değeriyle karşılaştırıldığında e . Bir mahfaza (2) içindeki yataklar üzerine monte edilmiş bir krank mili (1) içerir; krank boynunda (3) akslar (6) aracılığıyla mahfazaya (2) bir eksen (7) üzerinde dönebilir şekilde monte edilmiş bir çubuğa (5) bağlanan bir külbütör kolu (4) bulunur ve bir biyel kolu bulunur Şekil 8, bir eksen (9) aracılığıyla kılavuzlarda (11) hareket eden bir kaydırıcıya (10) eksenel olarak bağlanmıştır. Mekanizmanın tasarımında, çubuğa (5) ve bağlantıya bağlanan krank milinin (1) krank boynuna menteşeli olarak monte edilmiş bir külbütör kolunun (4) bulunması çubuk (8), kaydırıcıya (10) ileri ve geri hareket sırasında daha fazla hareket kazandırır.
![]()
Pirinç. 13. Mekanizmanın tasarımı, krank milinin dönüş hızını değiştirmeden kaydırıcının strok sayısının iki katına çıkarılmasına olanak tanır.
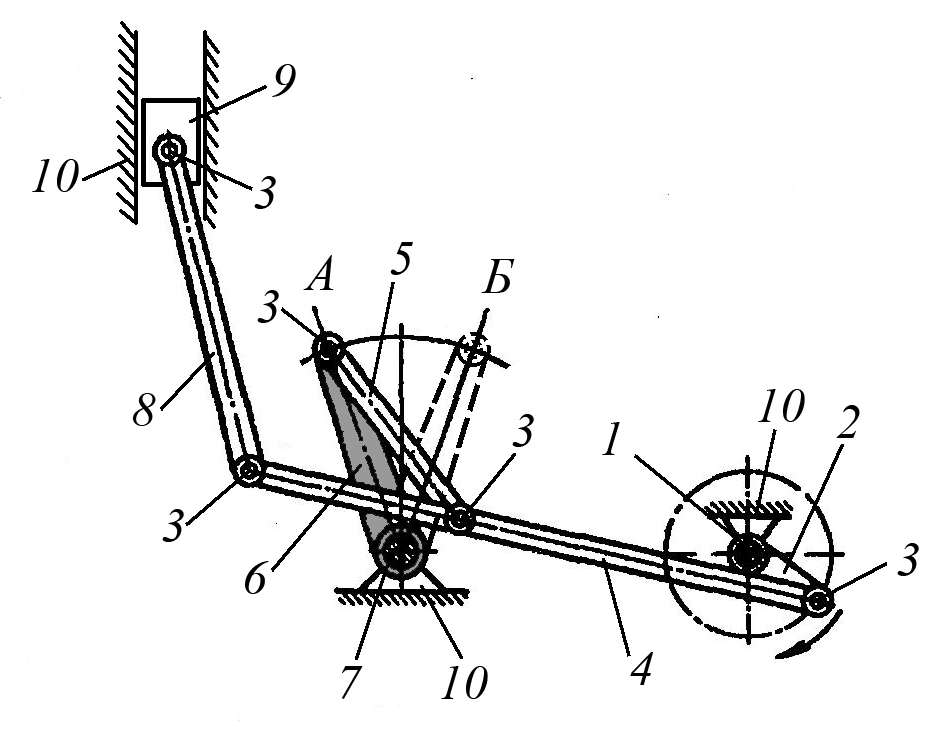
Şek. Şekil 13, tahrik krank milinin açısal dönüş hızını arttırmadan kaydırıcının strok sayısının iki katına çıkarılmasına olanak tanıyan bir külbütör mekanizması ile birleştirilmiş bir krank mekanizmasının tasarımını göstermektedir. Çerçeve üzerindeki yataklara monte edilmiş ve bir tahrikten dönüş alan bir krank mili (1), bir bağlantı çubuğu (2), bir çift kollu manivela (3) içerir. bir eksenin (4) ve bir biyel kolu (5) vasıtasıyla bir kaydırıcıya (6) bağlanan, yatak kılavuzları (7) içinde hareket eden bir düzenektir.
Mekanizma şu şekilde çalışmaktadır. Krank milini (1) 180 derecelik bir açıyla döndürürken, çift kollu kol (3) bir açıyla döner A
kaydırıcı (6) bir çift vuruş yaparken, krank milinin (1) 180 derece daha dönmesiyle çift kollu kol (3) tekrar açılı bir dönüş yapar A
orijinal konumuna geri döner ve kaydırıcı (6) aynı anda krank milinin bir turunda ikinci bir çift vuruş yapar.
Pirinç. 14. Kol mekanizmasının tasarımı, çıkış bağlantısının hareketini tersine çevirmenize olanak tanır.
Bazı durumlarda, geri döndürülemez bir tahrikin varlığında, mekanizmanın çıkış bağlantısının hareketinin tersine çevrilmesi gerekli hale gelir; bunun için, Şekil 2'de gösterildiği gibi içine ek bağlantılar yerleştirilebilir. Bu krank kolu mekanizması, tahrik milinin (1) üzerine monte edilmiş, çerçevedeki (10) yataklara monte edilmiş, bir eksen (3) vasıtasıyla tahrik biyel koluna (4) dönebilir şekilde bağlanan bir kranktan (2) oluşur; bu da, aşağıdaki araçlarla dönel olarak bağlanır. eksenlerin (3) ara biyel koluna (5) ve tahrik edilen biyel koluna (6) bağlanması, bunlar da eksenler (3) aracılığıyla sırasıyla külbütör koluna (6) ve kaydırıcıya (9) dönebilir şekilde bağlanır. Kaydırıcının (9) ileri geri hareketinin yönünü değiştirmek için, külbütör kolu (6), A konumundan B konumuna ve bunun tersi yönde hareket ettirilir, ardından sabitlenir (mandal Şekil 14'te gösterilmemiştir).

Pirinç. 15. Mafsallı ve kaldıraçlı mekanizmalardan oluşan bir sistem içeren bir helikopter eğik plakasının tasarım diyagramı.
Şek. Şekil 15, bir helikopterin ana rotorunun kanatlarını kontrol eden, menteşeli kol mekanizmaları temelinde yapılmış kompakt bir otomatik eğik plakanın orijinal tasarımını göstermektedir. Ana rotor kanatlarını kontrol eden menteşeli çubuklara (2) sahip bir döner halka (1) ve bir bilyeli yatak (4) aracılığıyla dönmeyen bir halkaya (5) monte edilen bir spline - menteşe (3) içerir. helikopter rotor tahrik dişli kutusunun miline (6) sabitlenmiştir. Dönmeyen bir halka (5) üzerinde, parmakları (7 ve 8) ve küresel yatakları (9 ve 10) kullanarak, çerçeve (11) Çerçeve (11) üzerinde, parmakları (12 ve 13) ve küresel yatakları (14 ve 15) kullanarak hareket eder. İLE
Ve M
radyal kaymalı yataklara (19 ve 20) ve baskı yataklarına (21 ve 22) dişli kutusu mahfazasına (23) sağlam bir şekilde monte edilmiş bir braket (18) içindeki bir pim (17) vasıtasıyla monte edilen bir kol (16) sabitlenmiştir. Kol (16) iki koldan yapılmıştır ve tahriki kol, bıçak vidasının ortak adımını kontrol etmek için çubuğa (24) dönebilir şekilde bağlanmıştır Uzunlamasına ve yanal kontrol çubukları (25 ve 26), kolektif adım kontrol çubuğuna (24) göre karşıt taraflarda dönmeyen bir halkaya (5) eksensel olarak bağlanmıştır. Makinenin tasarımında küresel yatakların (9, 10, 14, 15) bulunması, helikopter kontrol sisteminin normal çalışması için gerekli olan döner halkanın (1) küre boyunca dönmesini sağlar. Bu durumda küresel mesnetlerin (9 ve 10) merkezlerinden geçen eksen G
Ve D
ve küresel yatakların (14 ve 15) merkezlerinden geçen bir eksen İLE
Ve M
karşılıklı olarak diktir ve pervane kanatlarının genel eğimini kontrol etmek ve dönmeyen halkanın (5) tahrik milinin (6) eksenine göre yer değiştirmesini ve dönmesini önlemek için tasarlanan çerçeve (11) ile kolun (16) konumu, isteğe bağlıdır. makinenin boyuna ve enine kontrol düzlemi - çarpık. Kolun (16) dönme ekseni, noktalardan geçen eksene paraleldir İLE
Ve M
.
Eğik plaka makinesi aşağıdaki gibi çalışır. Pervane kanatlarının döngüsel eğimi, döner halkanın (1) noktaların iki hareket eksenine göre kontrol çubukları (25 ve 26) ile eğilmesiyle kontrol edilir. A
Ve İÇİNDE
. Bu durumda, küresel yataklardaki (9 ve 10) döner halka (1) ve dönmeyen halka (5), çerçeveye (11) ve küresel yataklardaki (14) döner halka (1) ve dönmeyen halka (5) ile birlikte çerçeveye göre döner ve 15, kola (16) göre. Pervane kanatlarının genel eğimi, hareket eden noktalar tarafından kontrol edilir P
kolektif adımın (24) kontrol çubuğu tarafından kol (16). Kol (16), dişli kutusu mahfazası (23) üzerine sağlam bir şekilde monte edilmiş braket (18) üzerine menteşelendiğinden, dönmeyen halka (5) radyal olarak yer değiştirir ve döndürülür. R
braketin (18) ekseninden geçen eksene göre ve şaftın (6) eksenine göre önemsiz bir miktarda yer değiştirir. Pervane kanatlarının genel ve döngüsel hatvesini ortaklaşa kontrol ederken noktalar aynı anda hareket eder A, B
Ve P
. Bu durumda, sabit halkanın (5) ve hareketli halkanın (1) eş zamanlı eğilmesi ve hareketi meydana gelir.
Rocker mekanizmaları
Sallanma mekanizmaları iki özel bağlantı içeren mekanizmalardır: her biri dönme veya sallanma hareketi gerçekleştiren, birbirine göre aşamalı olarak hareket eden bir külbütör ve bir külbütör taşı (bkz. Şekil 16). Mekanizmada bu tür iki baklanın bulunması, tahrik edilen baklanın ileri ve geri hareketi sırasında farklı hareket hızlarına yol açar, bu da bazı durumlarda mekanizmanın avantajı, bazı durumlarda ise dezavantajıdır ve genellikle kullanımı. Külbütörün yaptığı hareket bakımından farklılık gösteren iki ana külbütör mekanizması türü vardır; bunlar, külbütörün sallanma ve dönme hareketi olan mekanizmalardır;

Pirinç. 16. Külbütör mekanizmalarının çeşitleri
Şek. 16a gösterildi sahnelerin sallanma hareketine sahip mekanizma
eksen (2) üzerine bir külbütör taşının (3) yerleştirildiği, külbütörün (4) oluğunda öteleme hareketi imkanına sahip olan, bir eksen (5) aracılığıyla sabit bir stand üzerine eksenel olarak monte edilen ve bir sallanma yapan bir kranktan (1) oluşur. Krank (1) döndüğünde hareket Bu durumda, külbütör (4), krank köşe başına 1 döndürüldüğünde ileri doğru bir vuruş yapar. A
ve krankı belirli bir açıyla döndürürken ters strok İÇİNDE
bu da bu açıların eşitsizliği nedeniyle ileri ve geri hızlarda farklılığa neden olur. Şek. 16b gösteriliyor sahnelerin dönme hareketine sahip mekanizma
eksen (2) üzerine bir külbütör taşının (3) yerleştirildiği bir kranktan (1) ve bir eksen (5) aracılığıyla sabit bir stand üzerine eksensel olarak monte edilen ve krank (1) döndüğünde bir dönme hareketi gerçekleştiren bir külbütörden (4) oluşan. Külbütör mekanizmasının bu tasarımı ile külbütörün ileri ve geri hareket hızındaki fark aynı zamanda açı farkıyla da belirlenir. A
Ve İÇİNDE
.
Aynı amaçlar için kullanılan mafsallı dört bağlantılı mekanizmayla karşılaştırıldığında (bkz. Şekil 3), külbütör mekanizması, tahrik krankının ve tahrikli külbütörün ortak eksene göre simetrik olarak yerleştirilmesiyle yerleşiminin sağlanmasını kolaylaştırır; bu bazen ortak eksene göredir. tasarım sırasında gereklidir. Ancak aynı zamanda külbütör mekanizması, külbütör çiftindeki ilave kayma sürtünmesi nedeniyle kayıpları arttırmıştır ve bu nedenle esas olarak teknolojik ekipmanın hafif yüklü yardımcı mekanizmalarında kullanılmaktadır.
Pirinç. 17. Krank mekanizmasının açı değiştirmesi
tahrik edilen bağlantının salınımı.
Şek. Şekil 17, tahrik baklasının tahrik baklasına göre salınım açısını arttırmak veya azaltmak için kullanılan külbütör mekanizmasının tasarım diyagramını göstermektedir. Bir şaft (2) üzerine monte edilmiş, kendisine tork ileten, ona bir eksen (3) aracılığıyla bağlanan bir krank (1), bir külbütör taşı (4) ve kaymalı yataklar üzerinde dönmek üzere monte edilmiş bir eksen (6) üzerine monte edilmiş bir külbütörden (5) oluşur. Krank 1 belirli bir açıyla döndürüldüğünde A Vida 5 belirli bir açıyla döner İÇİNDE krank 1, bağlantı 5 uzunlukları ve aralarındaki mesafenin belirli bir oranı için bu iki katına çıkar. Ve bunun tersine, tahrik bağlantısı (5) ile krank (1) yarı yarıya bir açıyla dönecektir.
Pirinç. 18. Çapraz planya makinesini tahrik etmek için krank mekanizması.
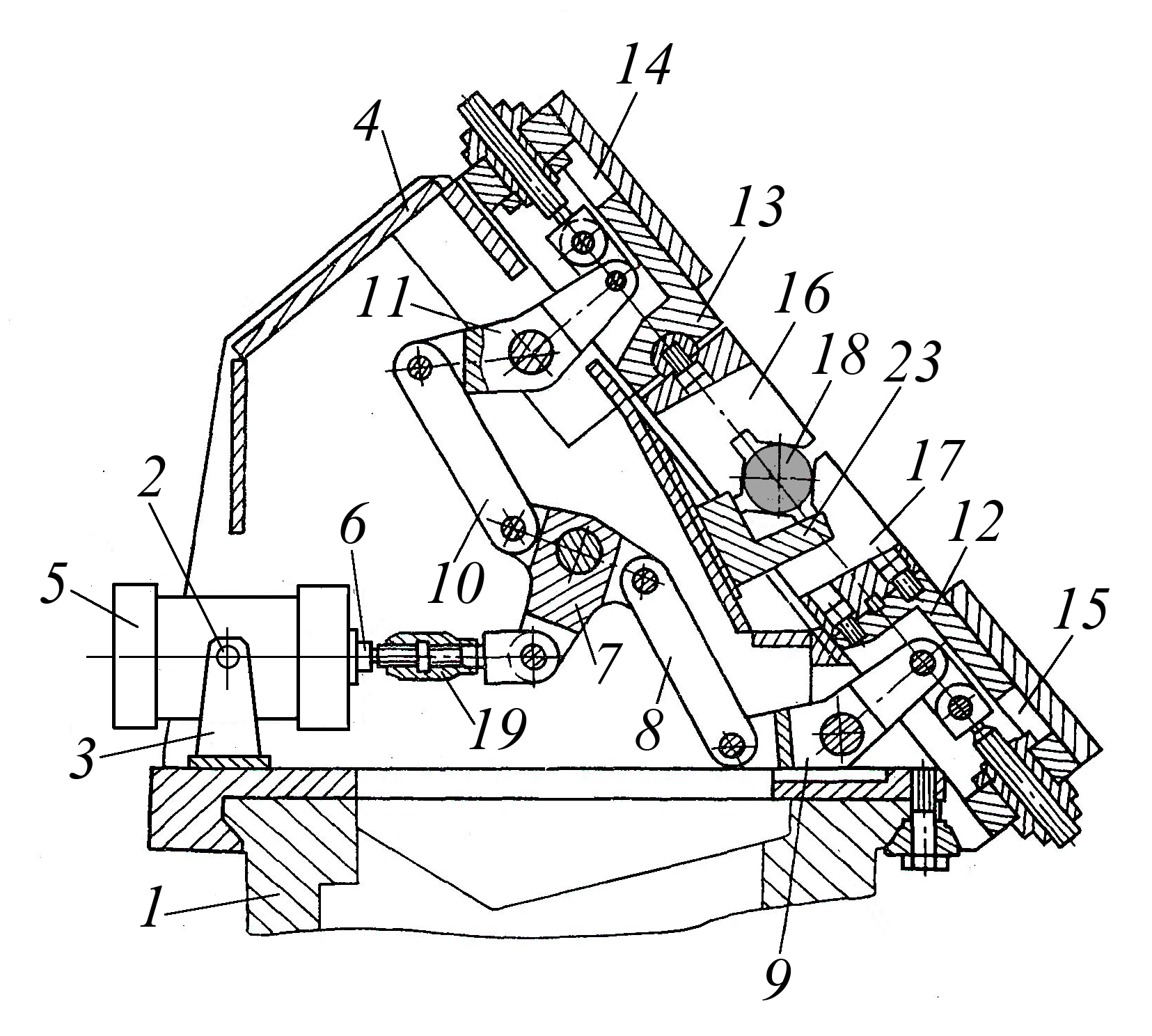
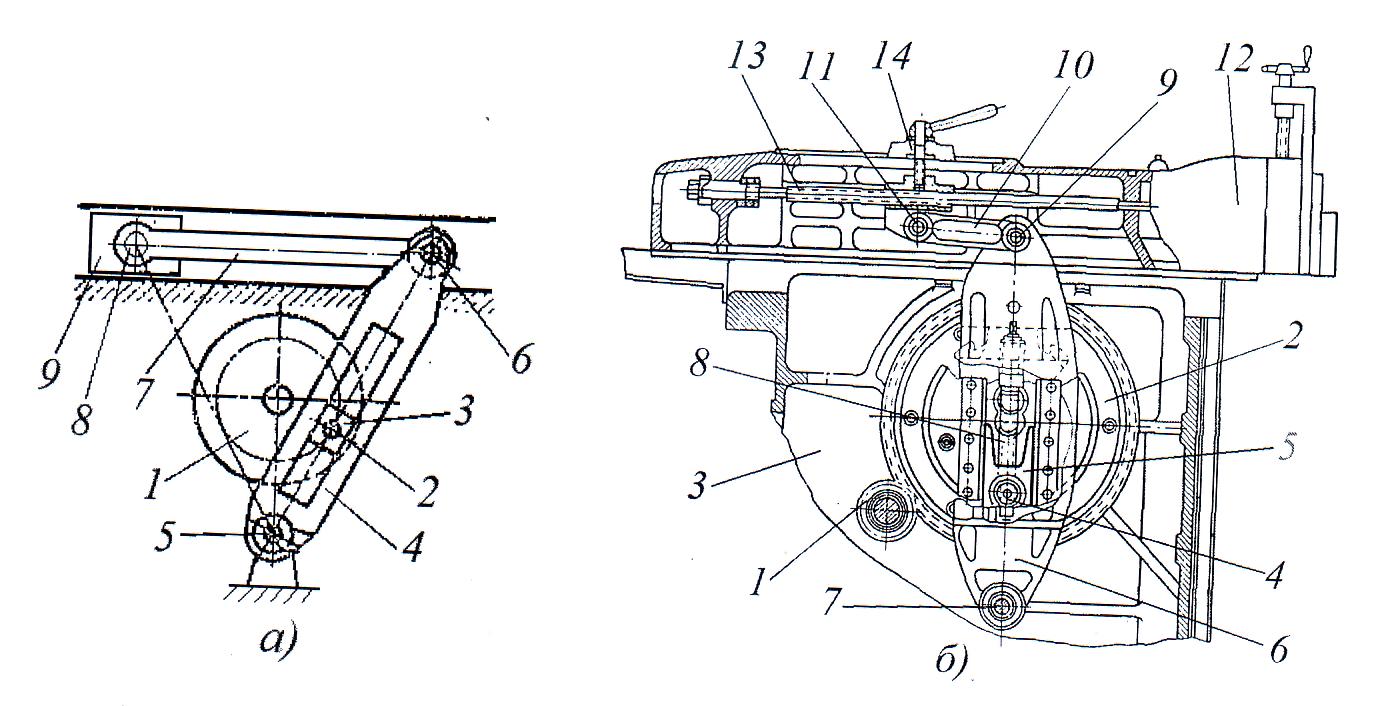
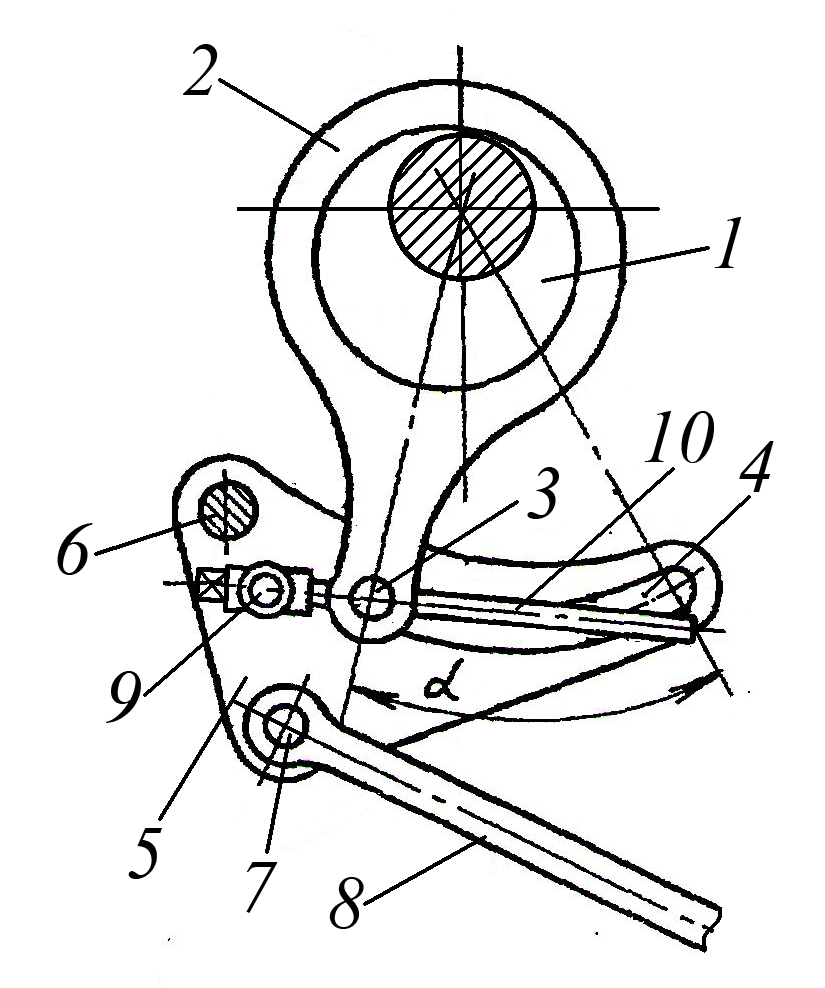
Ancak bazı durumlarda külbütör mekanizması teknolojik ekipmanın aktüatörü olarak da kullanılabilir. Bunun bir örneği, Şekil 18'de gösterilen çapraz planya makinesinin kaliper tahrikidir. Çerçevedeki yataklar üzerinde dönen bir şaft üzerine monte edilmiş, bir eksen (2) aracılığıyla bağlanan bir kranktan (1) ve bir külbütör taşından (3) oluşur. bir eksen (5) aracılığıyla çerçeveye eksenel olarak monte edilen külbütör (4) ve bağlantı çubuğuna (7) bağlanan eksen (6) yardımıyla, eksen (8) aracılığıyla kaydırıcıya (9) eksenel olarak bağlanır (bkz. Şekil 18a). Enine planyanın aktüatörünün tasarımında (bkz. Şekil 18b), kinematik diyagramda listelenen bağlantılara ek olarak, eksantrikliği ayarlamak için dişli 1 - 2, vida 8 şeklinde bir krank tahriki sağlanır. Değeri taşıyıcının (12) (kaydırıcı) strokunu belirleyen krank ekseninin (4), kurşun vidası (13) ve konumunu sabitleyen kelepçe (14), makinenin taşıyıcısının (12) başlangıç konumunu ayarlamak için gereklidir.

Pirinç. 19. Presin krank mekanizması.
Presin krank biyel kolu aktüatörünü bir külbütör mekanizması ile değiştirmek, eksantrik mil ile kaydırıcı arasındaki boşluğu en aza indirmenize ve ayrıca presin damga arası boşluğunun boyutunu ayarlama doğruluğunu basitleştirmenize ve artırmanıza olanak tanır ( bkz. Şekil 19). Tasarımı, kılavuzlarda (2) bir külbütör taşı (5) aracılığıyla eksantrik bir şafta (4) bağlanan bir sürgü (3), silindirler (7) ve sürgü (3) içinde yer alan ve onunla temas halinde olan bir külbütör (6) içeren bir çerçeve (1) içerir. anahtar 9 ve bir vida 8. Taşın (5) sahne arkası (6) ile yalnızca taşın (5) sahne arkası (6) oluğunda kayması için gereken minimum boşluğun bağlantısını sağlamak için, aralarına aşağıdakilerden oluşan bir kama mekanizması monte edilir: bir kama (10) ve bir ayar vidası (11). Damga arası boşluğun boyutunun hassas bir şekilde ayarlanması için, dönüşü, sahne arkasının kaydırıcının eğimli oluğu boyunca sağa veya sola (6) hareket etmesine yol açan bir vida (8) sağlanır. Kaydırıcının yukarı veya aşağı hareket etmesi sonucunda bulunduğu yer 3. Eksantrik şaft (4) döndüğünde, taş (5) düz, paralel bir hareket yapar; taşın (5) oluğundaki yatay yönde silindirler (7) üzerinde serbestçe hareket edebilmesi nedeniyle dikey bileşeni kaydırıcıya (3) aktarılır. slayt 6.

Pirinç. 20. Dönen kızaklı mekanizma.
Şek. Şekil 20, Whitworth mekanizması olarak adlandırılan, geri dönüş hızını arttırmak için kanal açma makinelerinde kullanılan döner kızaklı bir mekanizmayı göstermektedir. Bir eksen (5) üzerinde bulunan bir dişli (3) ile iç içe geçen ve ona sabit bir hızda dönüş sağlayan bir dişli (1), ekseni (6) eksenden geçen dönen bir külbütörün (2) oluğuna oturan bir külbütör taşı (4) içerir. 5 ve eksantriklik miktarı kadar tekerleğin (3) dönme eksenine göre kaydırılmıştır e ve ayrıca makine kaydırıcısına bağlı biyel kolu (7). Külbütörün (2) dönme merkezi, bu durumda krank olan dişlinin (3) dönme eksenine göre kaydırıldığından, külbütör taşı (4) çalışma stroku sırasında bir açıyla döner. A ve belirli bir açıyla ters vuruş sırasında İÇİNDE . Çünkü açı A daha fazla açı İÇİNDE eksantrikliğin büyüklüğü ile belirlenen bir miktar kadar olduğunda, sürgünün (2) ve onunla ilişkili biyel kolunun (7) ters hızı, bu açıların oranıyla orantılı bir miktarda çalışma strokunun hızından daha büyük olur.
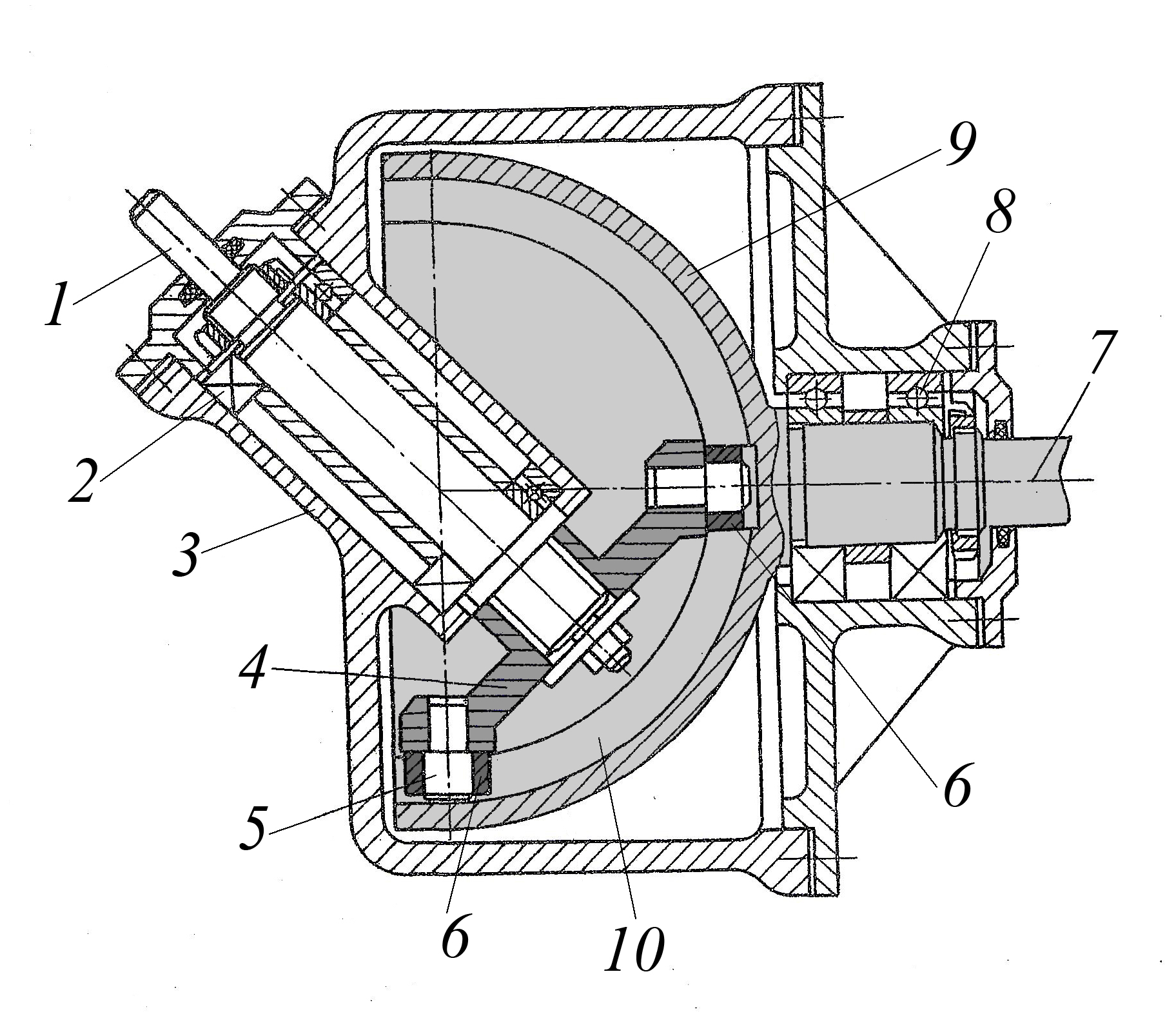
Pirinç. 21. Durdurma hareketini tahrik edilen mile ileten külbütör mekanizması.
Sabit bir hızda dönen bir tahrik milinden, aralıklı olarak dönen tahrik edilen bir mile dönüşü iletmek için bir külbütör mekanizması kullanılabilir. Böyle bir mekanizmanın tasarımı Şekil 2'de gösterilmektedir. 21. Mahfazaya (9) monte edilmiş ve sabit bir hızda dönen, üzerine sabit bir şekilde sabitlenmiş bir eksantrik (7) içeren, üzerine iki kollu bir bağlantı çubuğunun (8) monte edildiği, tahrik kızaklarına (2) menteşeli olarak bağlanan bir tahrik mili (4) içerir ve sabitlemenin (6) yanı sıra, tahrik edilen flanşın (1) bir manşon (11) ve bağlantının (10) bir manşon (12) ile serbestçe dönme imkanı ile şaft (4) üzerine monte edilmesi. Bu durumda, flanş (1), radyal oluklar (3) ile yapılır, içine eksantrik (7) biyel kolu (8) ile döndüğünde, tahrik sürgüsü (2) dönüşümlü olarak girer ve sabit bir mahfaza (9) içindeki dikey oluk (5) boyunca sürekli kayan sabitleme sürgüsü (6) periyodik olarak tahrik edilen flanşın oluklarına yerleştirilir 1. Tahrik mili (4) eksantrik (7) ile birlikte döndüğünde, çift kollu biyel kolu (8) tahrik edilen flanşın (1) oluklarına (3) tahriki (2) ve sabitleme sürgüsünü (6) periyodik olarak yerleştirir ve çıkarır, bu da tahrik edilen flanşın dönmesine neden olur Şekil 1'de gösterildiği gibi, tahrik sürgüsü (2) oluğa (3) yerleştirildiğinde ve tahrik edilen flanş (1), kilitleme sürgüsü (6) oluğa (3) yerleştirildiğinde durur. Tahrik edilen flanştaki (1) olukların (3) sayısı, dönme hızının dönme hızına oranını belirler. tahrik milinin (4) hızı. Tahrik sürgüsü (2) oluk tahrikli flanşa (1) girdiğinde, ikincisi yavaş yavaş dönmeye başlar, ardından hızı hızlı bir şekilde artar ve sürgü (2) kavramadan çıktığında tekrar azalır; bu da Mekanizmanın yüksek hızlarında dahi sarsıntı ve darbeleri ortadan kaldırır.
Şekil 22 Külbütör mekanizmasının tasarımı, tahrik ekseni ve tahrik edilen miller
45 derecelik bir açıyla kesişen
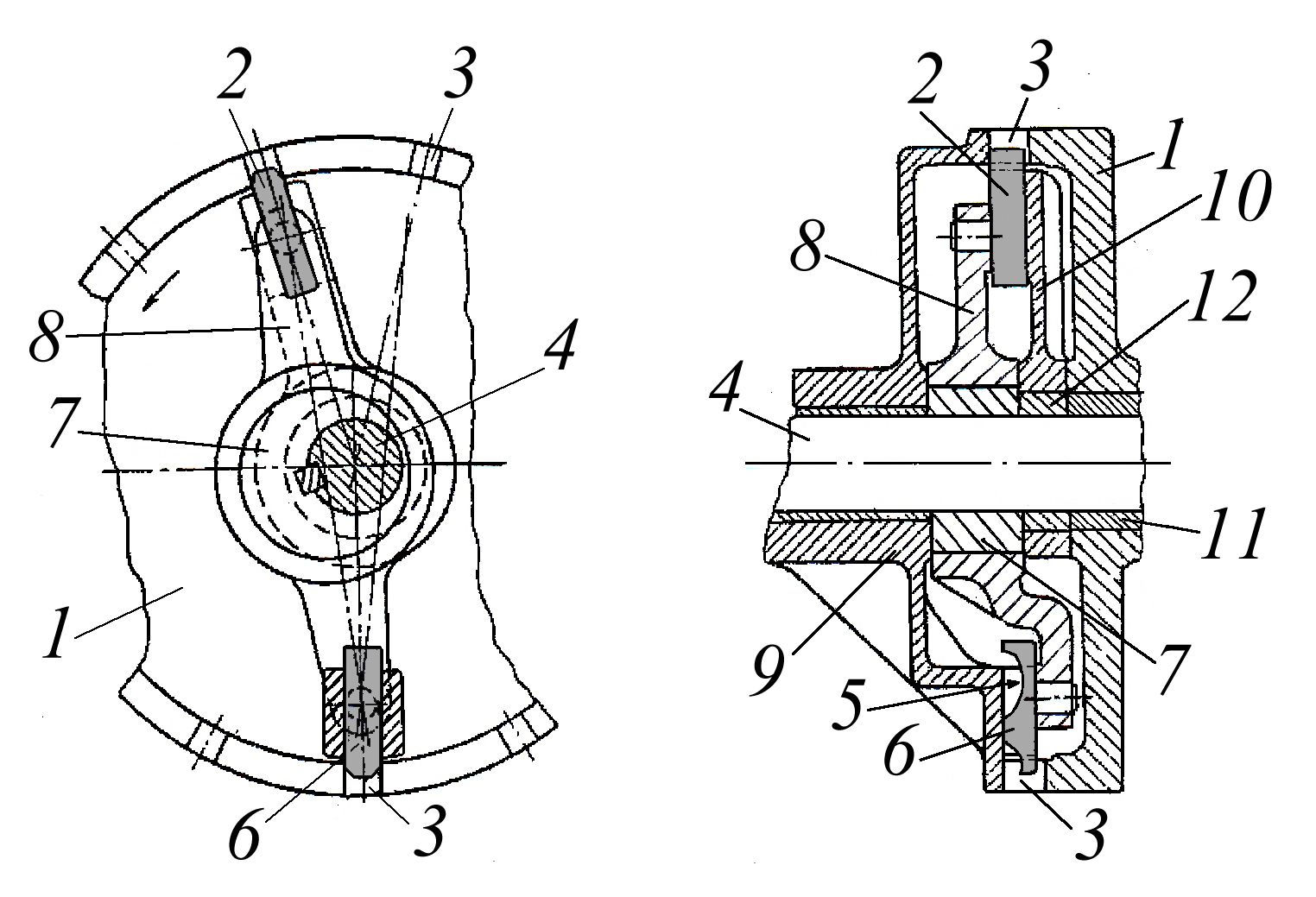
Şek. Şekil 22'de 45 derecelik açıyla kesişen miller arasında hareketin iletilmesini sağlayan külbütör mekanizmasının tasarımı görülmektedir. Bu mekanizma, alt ucunda bir krankın (4), akslara (5) eksenel olarak monte edilmiş bir destek krankının (4), kaydırıcıların (6) yanı sıra monte edilmiş bir çıkış şaftının (7) bulunduğu yataklar (2) vasıtasıyla bir mahfazaya (3) monte edilmiş bir tahrik mili (1) içerir. krankın (4) sürgülerinin (6) temas halinde olduğu, 90 derecelik bir açıyla kesişen iki oluğa (10) sahip olan, sürgüyle (9) tek parça halinde yapılmış mahfaza (3) içindeki yataklar (8) üzerinde.
Mekanizma şu şekilde çalışmaktadır. Krank 4'ü belirli bir açıyla döndürürken 2𝝅
sürgüler (6) oluklar (10) boyunca hareket eder ve aynı zamanda sürgüyü belirli bir açıyla döndürür 𝝅
dolayısıyla, kranktan (4) külbütöre (9) dişli oranı şuna eşittir: 2
. Mekanizmanın tasarımı, hareketin sürgüden (9) kranka (4) iletilmesine izin verir (bu durumda, mil (7) tahrik eden olur ve mil (1) tahrik edilen olur). Bu durumda dişli oranı şuna eşit olacaktır: 0,5
.
İlave kol mekanizmaları
yapısal elemanlar
Teknolojik ekipman ve aksesuarların bir parçası olarak kaldıraç mekanizmaları kullanıldığında, verimli çalışmayı sağlamak için, aşağıdaki görevlerin çözülmesine olanak tanıyan ek yapısal elemanlar yerleştirilmiştir:
− çıkış bağlantısının (kaydırıcı, kol, külbütör) strok değerini ayarlayın,
- çıkış bağlantısının başlangıç (son) konumunu ayarlayın,
− Mekanizma parçalarını hasarlardan koruyun,
− karmaşık hareketi çıkış bağlantısına iletin
− Mekanizmayı açıp kapatın,
Bu tür kaldıraç mekanizmalarının yapıcı uygulamasının örneklerini ele alalım. Kaldıraç mekanizmasının çıkış bağlantısının strokunun ayarlanması, kaldıraç kollarının oranını değiştirerek veya tahrik krankının eksantriklik değerini değiştirerek iki şekilde gerçekleştirilir.

Şekil 23 Öndeki kolunun uzunluğunu ayarlamanıza olanak tanıyan bir cihazın tasarımı.
Şekil 23, hafif yük kaldıraç mekanizmasının koluna yerleştirilmiş, ön kolunun uzunluğunu ayarlamanıza olanak tanıyan bir cihazın tasarımını göstermektedir. Bir ön kol (1) ve tahrikli (2) koldan oluşan ve bir eksen (3) üzerine monte edilmiş olan bu kaldıraç, bir eksen (5) aracılığıyla tahrik çubuğuna (4) menteşeli bir şekilde bağlanan ve oluk (10) içinde gerekli pozisyonda sabitlenen yerleşik bir pime (6) sahiptir ve dişli deliğine bir ayar vidası (7) sokulur. Bu durumda, kolun tahrik edilen kolu (2), eksen (8) aracılığıyla kol mekanizmasının tahrik edilen bağlantısına döner şekilde bağlanır. Kolun ön kolunun (1) uzunluğunu ayarlarken, somun (9) sökülür, ardından pim (6), ayar vidası (7) kullanılarak kolun ön kolunun (1) oluğu boyunca bir tarafa veya diğerine hareket ettirilir ve ardından pim (6) daha sonra somun (9) ile kilitlenir.
Şekil 24 Çıkış bağlantısının strokunu ayarlamak için bir cihazla krank mekanizmasının tasarımı
Şekil 24, tahrik kolunun ayarlanabilir uzunluğuna sahip bir ara çift kollu kol şeklinde yapılmış, çıkış bağlantısının strokunu ayarlamak için yerleşik bir cihaza sahip krank mekanizmasının tasarımını göstermektedir. Krank üzerine bir biyel kolunun (2) takıldığı krank mili (1), eksen (3) aracılığıyla eksen (6) aracılığıyla çerçeveye monte edilmiş bir ara çift kollu kol (5) ve tahrik edilen çubuğa (8) bağlanan eksen (7) aracılığıyla eksenel olarak bağlanır. aynı zamanda, eksen (9) aracılığıyla ara kol (5) üzerine, üzerine bir somunun (Şekil 34'teki somun gösterilmemiştir) yerleştirildiği, biyel kolunun (2) eksenine (3) dönebilir şekilde bağlanan bir kılavuz vida (10) menteşeli olarak monte edilir. ara kolun (5) yarıçap oluğunda (4) bir kaydırıcı gibi hareket etme yeteneği. Kurşun vida (10) döndüğünde, bağlantı çubuğu (2) bir açıyla döner αi bu, ara kolun (5) ön kolunun boyutunda bir değişikliğe yol açar ve tahrik edilen ve tahrik edilen kolların uzunluklarının değişen oranı, mekanizmanın tahrik edilen çubuğunun (8) strok değerinin değiştirilmesini mümkün kılar. Mekanizmanın çıkış bağlantısının strokunu ayarlamak için dikkate alınan cihaz, daha önce tartışılandan olumlu bir şekilde farklıdır, çünkü ayarlamalar yaparken, çıkış bağlantısının (çubuk 8) varlığıyla sağlanan başlangıç \u200b\u200bpozisyonunu korumaya izin verir. merkezi krank milinin (1) ekseni ile çakışan yarıçaplı bir oluğun (4) ara kolu (5), bu nedenle ayarlamalar yaparken biyel kolunun (2) döndürülmesi ara kolun (5) konumunu değiştirmez.

Pirinç. 25. Ayarlanabilir eksantriklik değerine sahip eksantrik milinin tasarımı.
Şek. Şekil 25, eksantrikliğinin, şaftın karşılık gelen yüzeyine monte edilmiş bir eksantrik manşonun döndürülmesiyle ayarlandığı bir eksantrik şaftın tasarımını göstermektedir. Eksantrik milin önerilen tasarımı, eksantrik boynunda (1) bir eksantrik manşon (3) bulunan, iç silindirik yüzeyde içine bir kamanın (5) sığabileceği oluklara (8) sahip oluklara (4) sahip bir milden (2) oluşur. eksantrik boyun (1) ve yaylar (7) tarafından yay yüklü parmaklar (6) üzerinde duran Bu durumda, anahtarın (5) uçlarına, her birinin içinde maksimum bir spiral yüzey (16) ile sınırlanan bir girintiye (11) sahip olan halkalar (9 ve 10) monte edilir. derinlik oluğun (4) yüksekliğine eşittir. Halkaların (9 ve 10) ve eksantrik burcun (3) eksantrik oluklara eksenel olarak sabitlenmesi için Şaftın (2) muyluları (1), içlerine sağlam bir şekilde sabitlenmiş yarım halkalar (12) ile donatılmıştır ve sabitleme için. radyal yönde, yaylı bilyeli kelepçeler (13) halkalara (9 ve 10) monte edilmiştir. Halkaları döndürmek için içlerinde delikler (14) yapılır ve eksantrik manşonun (3) dönmesi için delikler (15) yapılır.
Eksantrik manşon 3 aşağıdaki şekilde ayarlanır. Halkalar (9 ve 10), anahtar (5) eksantrik manşonun (3) oluğundan (4) tamamen çıkana kadar çubuğun veya levyenin yerleştirildiği deliklerden döndürülür. Bundan sonra eksantrik manşon (3), gerekli açıya döndürülür. bunun sonucunda şaftın (2) eksantriklik değeri değişir. Daha sonra halkalar (9 ve 10), kama (5) eksantrik burcun ilgili oluğuna (4) ve halkalardaki girintiye (11) girene kadar benzer şekilde döndürülür. eğimli yan yüzeyi girintinin (11) karşılık gelen eğimli yüzeyine karşıdır. Bu, eksantrik burcun (3) uçlarının konumunun ayarlanması işlemidir.
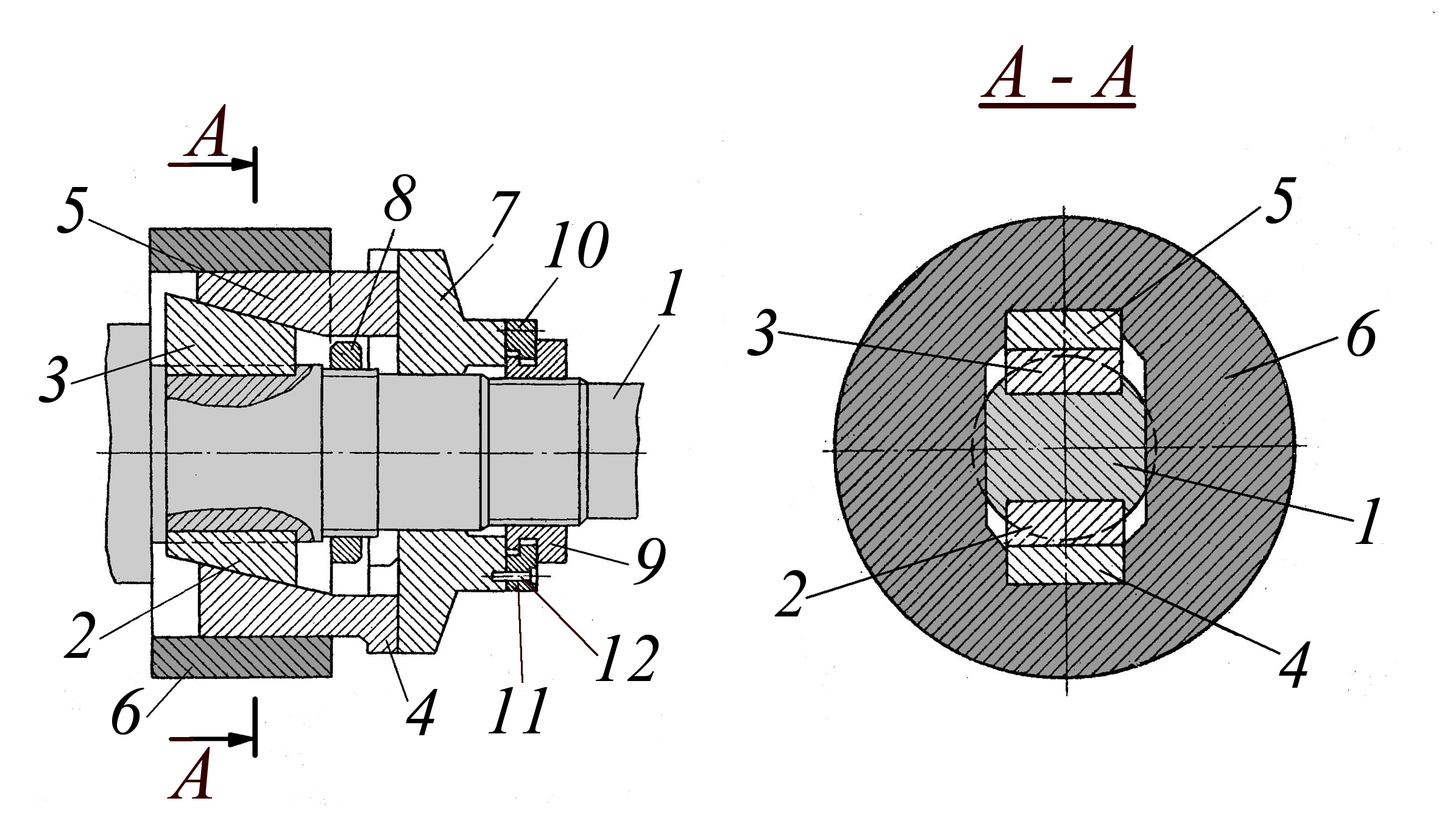
Pirinç. 26. Eksantrik milinin eksantrikliğinin düzgün şekilde ayarlanması için bir kama cihazının tasarımı.
Şek. Şekil 26, eksantrik milinin eksantrikliğini düzgün bir şekilde ayarlamak için bir kama cihazının tasarımını göstermektedir. Üzerine kama yüzeyleri ile eksantriğin (6) uzunlamasına oluklarında eksenel hareket olasılığı olan kamaların (4 ve 5) birleşme yüzeyleri ile temas halinde olan kamaların (2 ve 3) monte edildiği bir tahrik mili (1) içerir ve flanşın (7) karşılık gelen oluklarındaki radyal hareket, ikincisi, milin dişli kısmında bulunan bir somun (9) aracılığıyla eksenel hareket imkanı ile mil (1) üzerine monte edilir. Bu durumda, eksantrik (6), bir somun (8) vasıtasıyla eksenel yönde şaft (1) üzerine sabitlenir ve somun (9), yarım halkalar (10, 11) ve vidalar (12) kullanılarak flanşa (7) bağlanır.
Cihaz aşağıdaki gibi çalışır. Eksantrik milin (1) eksantrikliğini değiştirmek gerekirse, somunu (9) döndürerek flanşı (7) istenen yönde hareket ettirin; bu sırada takozlar (4 ve 5), sabitlenmiş takozların (2 ve 3) birleşme yüzeyleri boyunca kayar. şaft (1), flanş (7) ile birlikte eksenel yönde hareket eder ve içinde açılan oluğun yüzeyi boyunca radyal olarak kayar. Takozların (4 ve 5) bu hareketi sonucunda eksantrik (6), eksantrik milinin eksantrikliğini artırarak veya azaltarak radyal yönde hareket eder.
Kol mekanizmasının çıkış bağlantısı bir kaydırıcı ise, ona bağlı biyel kolunun uzunluğu değiştirilerek başlangıç veya son konumu ayarlanır ve kol mekanizmasının çıkış bağlantısı bir kaldıraç veya külbütör kolu ise, o zaman açısal konum ayarlanır. Bir kaldıraç mekanizmasının çıkış bağlantısının konumunu ayarlamak için cihazların tasarım örneklerine bakalım.

Şekil 27 Başlangıç ayarlı kaldıraç mekanizması
çıkış bağlantısı konumu
Şekil 27'de eksantrik milden iticiye hareket aktarımının çift kollu bir ara kol vasıtasıyla gerçekleştirildiği kaldıraç mekanizmasının tasarımı gösterilmektedir. Bir eksantrik mil (1), eksantrik milin krank pimi üzerine monte edilmiş bir mahfaza (2) ve dişli uçları birbirine konumu olan bir dişli kaplin (4) ile bağlanan bir çubuktan (3) oluşan bir bağlantı çubuğu içerir. kilit somunları (5) ve ayrıca eksen (8) üzerine dönebilir şekilde monte edilmiş, itici (11) ile sürekli temas halinde olan eksen (9) üzerine bir silindirin (10) monte edildiği tahrik kolu üzerine çift kollu bir kol (7) ile sabitlenmiştir. Bu tasarım Biyel kolunun uzunluğu, gövdenin (2) ve çubuğun (3) dişli uçlarının kaplinin (4) içine vidalanması veya sökülmesi yoluyla uzunluğunun ayarlanmasıyla, konum kolunun (7) ve buna göre iticinin (11) başlangıç konumunun değiştirilmesine olanak tanır. Mekanizmayı ekipmanın bir parçası olarak kurarken gerekli mi?

Şekil 28 Biyel kolunun uzunluğunu değiştirmek için bir cihaza sahip krank mekanizması
Şekil 28, biyel kolunun uzunluğu değiştirilerek kaydırıcının başlangıç konumunun ayarlandığı presin krank mili-biyel kolu mekanizmasının tasarımını göstermektedir. Krank milinin krank pimi (3) üzerine monte edilmiş ve krank mekanizmasının kaydırıcısına (5) bir eksantrik burç (2) ve deliğinde bulunan bir eksen (4) aracılığıyla bağlanan bir biyel kolu (1) içerir; eksantrik burcun (3) deliğinde (7) bir bir burç (9) ile eksen (8), ayar vidasının (10) yerleştirildiği dişli bir hareketle döner şekilde monte edilir. Vidanın (10) bilyeli desteği (12), baskı yatağı (15) üzerindeki camın (14) içine monte edilir ve kapak (17) tarafından sabitlenir. vidanın kare sapı (16) kapaktaki (17) delikten geçirilir. Biyel kolu (1), bir kayar yatak (18) aracılığıyla krank milinin krank pimi (3) ile, bir kayan yatak (19) aracılığıyla eksantrik burç (2) ve bir kayan yatak (20) aracılığıyla eksen (4) ile eksantrik burç (2) ile temas halindedir. eksenel yönde, eksen (4) bir rondela (21) ve cıvatalar (22) ile sabitlenir.
Biyel kolunun (1) uzunluğunu değiştirmek için, ayar vidası (10), kare kafa (16) tarafından istenen yönde döndürülür; bu, dişli kovana (9) vidalandığında veya vidaları çıkarıldığında eksantrik burcu (2) eksen (4) etrafında dönmeye zorlar. ve böylece biyel kolunu (1) uzatarak veya kısaltarak ekseninin konumunu değiştirir, bu da kaydırıcının (5) başlangıç konumunda bir değişikliğe yol açar
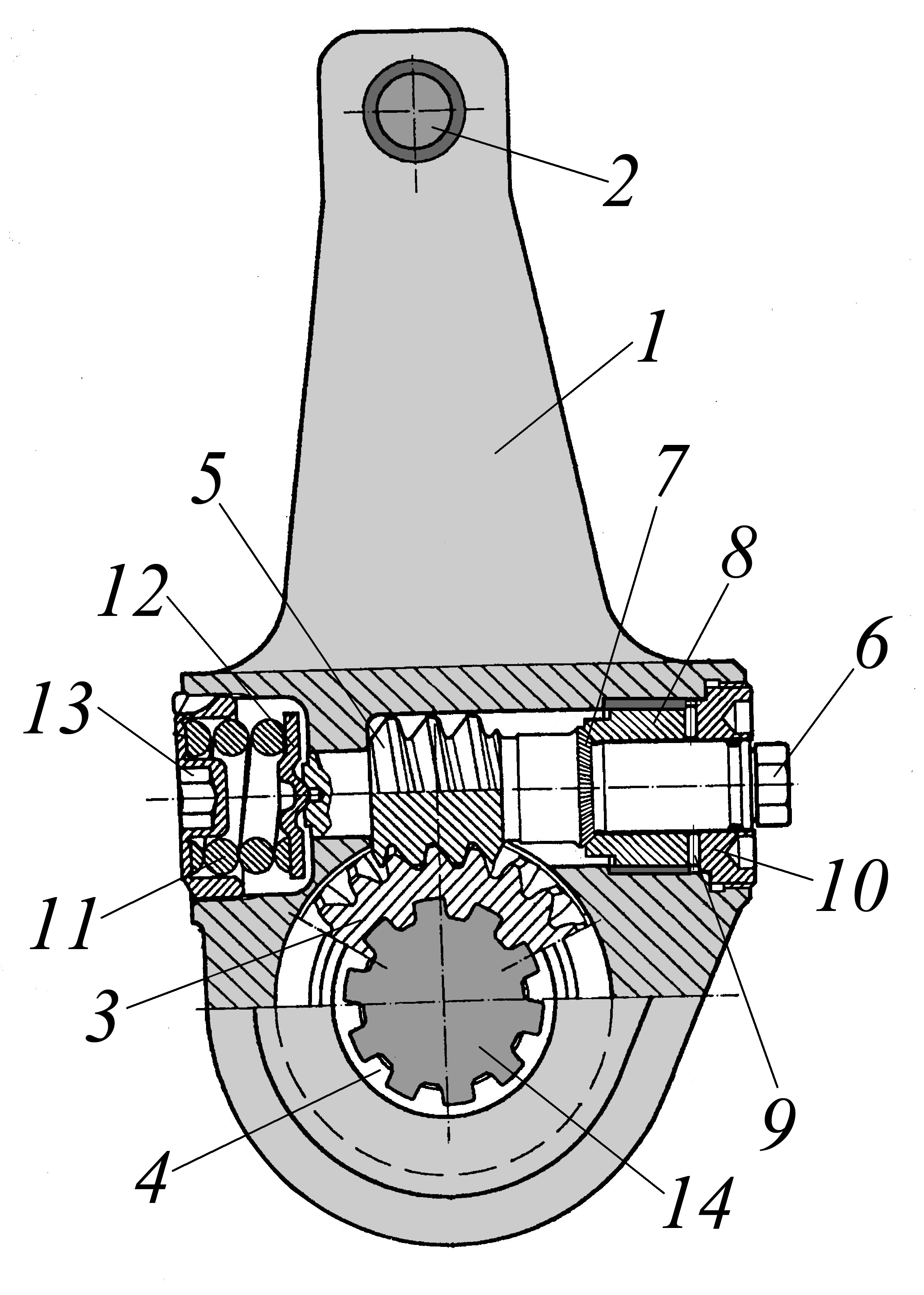
Şekil 29 Açısal konumunu ayarlamak için yerleşik cihaza sahip sallanan sandalye
Şekil 29, monte edildiği eksene göre açısal konumunu ayarlamanıza olanak tanıyan, külbütör koluna yerleştirilmiş bir cihazın tasarımını göstermektedir. Eksen (2) aracılığıyla kaldıraç mekanizmasının tahrik çubuğuna eksenel olarak bağlanan külbütör koluna (1) yerleştirilmiş olan bu cihaz, külbütör kolunun deliğine yerleştirilmiş bir sonsuz dişli çarktan (3) oluşur ve iç kamaları (4) ile oluklu mil ile temas eder. eksenin (14) yüzeyi ve ayrıca sonsuz dişli çarkının eksenine dik olarak yapılan külbütör kolunun deliğine monte edilen sonsuz vida (5) ile birleşir. Bu durumda, solucanın (5) sol muylusu, altıgen ucu (6) kapaktaki (10) bir takım silindirler (9) aracılığıyla deliğe yerleştirilmiş olup, sağ ucunda konik dişlerin bulunduğu manşon (8) ile temas halindedir. Sonsuz vida (5) üzerinde yapılan eşleşen dişlerle temas halinde olan ve bir bağlantı oluşturan Şekil 7'ye ait. Sonsuz vidanın (5) merkezi konik deliği ile sol ucu, yay (11) ve kapak (13) tarafından bastırılan elastik rondelanın (12) birleşme yüzeyi ile temas halindedir.
Külbütörün (1) eksene (14) göre açısal konumunun ayarlanması aşağıdaki şekilde gerçekleştirilir. Külbütörü (1) bir yönde veya başka bir yönde döndürmek için, sonsuz vida (5), bir anahtarla altıgen bir kafa (6) tarafından istenen yönde döndürülürken, dönüşü, bir kanallı bağlantı vasıtasıyla sabitlenen sonsuz dişli çarka (3) iletilir. şaft (14) üzerinde hareketsiz kalır ve külbütör (1), şafta (14) göre açısal konumunu değiştirerek istenen yönde döner.
Teknolojik ekipmanın, özellikle de mekanik preslerin aktüatörleri olan krank ve biyel kolu mekanizmalarının kaydırıcıları, ekipmanın taban kısmına göre konumları ve hareketleri açısından katı gereksinimlere tabidir (mekanik bir pres için bu gerekliliktir). Sürgü vuruşunun masanın taban yüzeyine dikliği için), dolayısıyla sürgü kılavuzları konumlarını ayarlamak için uygun cihazlara sahiptir.

Şekil 30 Kaydırıcının konumunu ayarlamanıza olanak tanıyan cihazın tasarımı
iki düzlemde.
Şekil 30, kaydırıcının konumunu iki düzlemde ayarlamanıza olanak tanıyan bir cihazın tasarımını göstermektedir. Bu cihaz, iki düzlemde ayarlama imkanı ile çerçeve (1) üzerine monte edilmiş sürgü (10) kılavuzlarını (4) ve ayrıca çerçeve (1) ile temas halinde kılavuzun (4) dişli deliğine monte edilmiş dişli bir burcu (3) içerir. dişli burçtaki (3) ve somundaki (12) eşleşme oluklarıyla temas halinde kılavuz görevi gören altıgen başlı ve dikdörtgen çıkıntılara sahip küresel bir rondela (7) ve bir pim (14) ile şekillendirilmiş bir rondela (9). ön düzlemde, vidayı (8) gevşetin ve şekillendirilmiş rondelayı (9) döndürerek burcu (3) eksenin (2) dişli deliğine hareket ettirin; bu, kılavuzun (4) konumunun değişmesine yol açar. Gerekli miktarda ayarlama tamamlandıktan sonra vida, Kılavuzların öne dik düzlemdeki konumunu ayarlamak için somunun (12) sıkılması gevşetilir ve aynı şekilde şekillendirilmiş somun (9) döndürülerek kılavuz (4) gerekli miktara hareket ettirilir, bundan sonra somun (12) sıkılır.
Teknolojik donanımın bir parçası olarak çalışan bir krank mekanizmasında, eksantrik milinin krank pimi üst ve alt noktaya göre ± 15 derecelik bir bölgede döndürüldüğünde maksimum kuvvet meydana gelir ve bunun sonucunda ortaya çıkan tork değişmez. maksimum ve bu nedenle bilinen güvenlik cihazları tasarımları (mekanizma tahrikine yerleştirilmiş güvenlik kavramaları) onu olası aşırı yüklerden korumaz. Bununla bağlantılı olarak, krank mekanizmasının bağlantılarına doğrudan güvenlik cihazları yerleştirilmiştir.
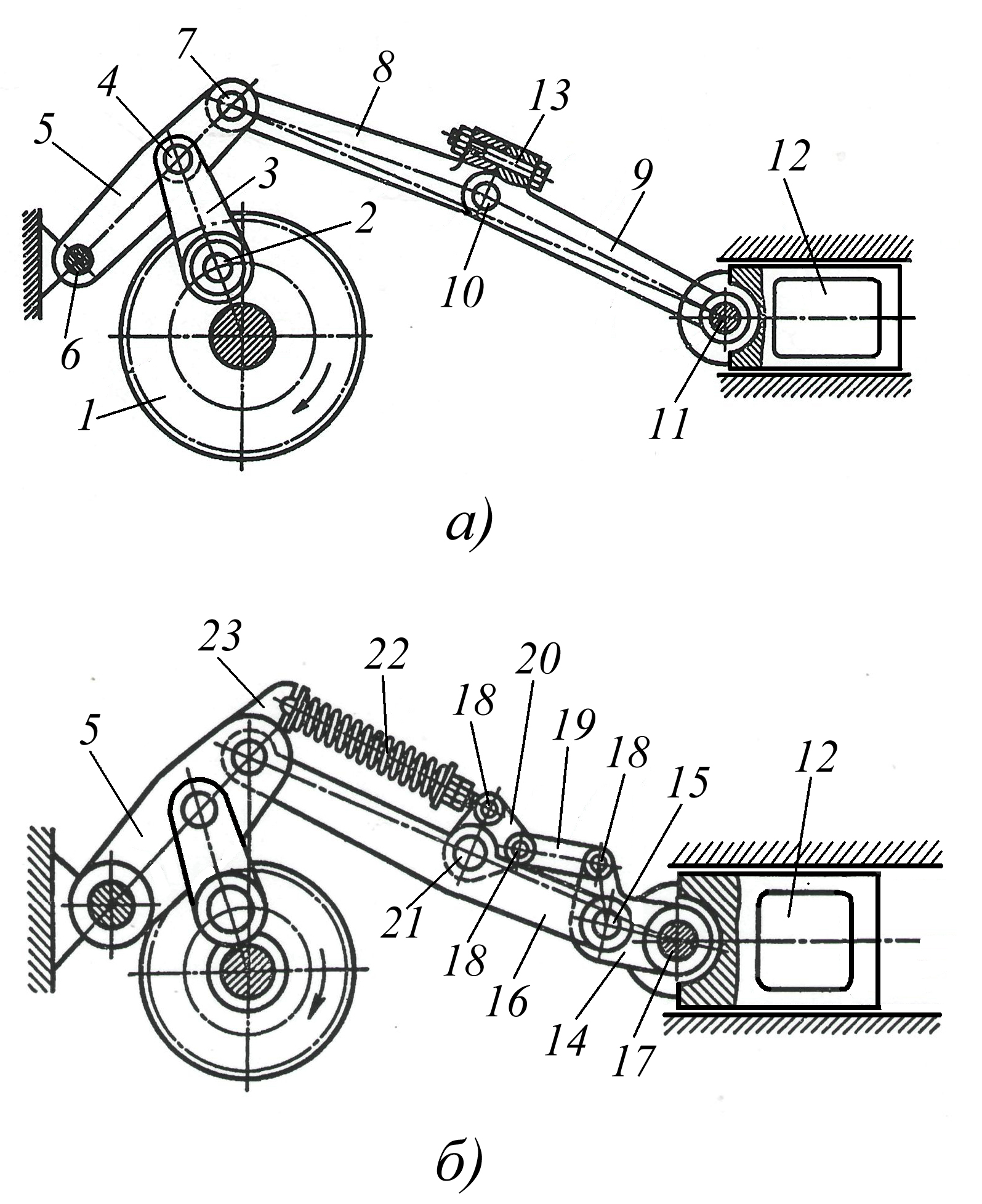
Şekil 31 Krank mekanizmasının bağlantı çubuğuna yerleştirilmiş güvenlik cihazları için tasarım seçenekleri.
Şekil 31, krank mekanizmasının biyel koluna yerleştirilmiş güvenlik cihazları için iki tasarım seçeneğini göstermektedir. Mekanizmanın krank mili, dişli (1) ile tek parça halinde yapılır ve krank pimi (2), biyel koluna (3) eksenel olarak bağlanır, bu da eksen (4) aracılığıyla eksen (6) kullanılarak çerçeveye monte edilen külbütör koluna (5) bağlanır. ve eksen (7) aracılığıyla, bir tahrik parçası (8) ve bir tahrik edilen parçadan (9) oluşan, bir eksen (10) ile bir emniyet cıvatası (13) ile birbirine bağlanan bir bağlantı çubuğu düzeneğe bağlanır (bkz. Şekil 31a), bağlantı çubuğu ise eksen (11) aracılığıyla sürgüye (12) bağlanır. Yük arttıkça, sürgüye (12) etki eden emniyet cıvatası izin verilen 13 kopmayı aşar, biyel kolunun (8 ve 9) parçaları eksen (10) üzerinde birbirine göre döner ve hareket krank milinin kaydırıcıya (12) iletilmemesi, mekanizmanın karmaşık parçalarının kırılmasının önlenmesini sağlar. Kaydırıcıya (12) etki eden kuvvetteki artışın nedenleri ortadan kaldırıldıktan ve emniyet cıvatası (13) değiştirildikten sonra mekanizma çalışmaya devam edebilir.
Şekil 31b, kendi kendini sıfırlayan yerleşik güvenlik mekanizmasına sahip mekanizmanın bir versiyonunu göstermektedir. Eksenler (15, 17) aracılığıyla menteşeli olarak bağlanan tek parçalı bir biyel kolu (16) ve bir kaydırıcı (12) ile bir ara çift kollu kol (14) ve eksenler (18) aracılığıyla bir kol (14), bir çubuk (19) ve bir çift kollu kol (20) içerir. , külbütör kolunun (5) çıkıntısına (23) bağlanan bir sıkıştırma yayı (22) aracılığıyla biyel kolu (16) üzerindeki bir eksen (21) aracılığıyla menteşeli olarak monte edilmiştir. Yük arttıkça, kaydırıcıya (12) etki eden yay (22) izin verilen sınırı aşar ve biyel kolu (16) ve eksen (15) üzerindeki çift kollu kol (14), birbirine göre döner, böylece krank milinden kaydırıcıya hareket aktarımı ortadan kaldırılır. Kaydırıcıya (12) etki eden kuvvetteki artışın nedenlerini ortadan kaldırdıktan sonra, yay (22) orijinal konumuna geri döner ve emniyet cihazının tüm parçalarını (kol 14, çubuk 19 ve kol 20) geri getirir, bunun sonucunda mekanizma çalışmaya devam edebilir.

Pirinç. 32. Ürünü farklı yüksekliklerde bulunan konveyörler arasında aktarmak için eğim aktüatörünün tasarımı.
Şek. Şekil 32, bir ürünü farklı yükseklik seviyelerinde bulunan konveyörler arasında aktarmak için, içine tahriksiz silindirik ve konik dişlilerin yerleştirildiği, parçanın taşınmasına izin veren dört çubuklu mafsallı bir yapının tasarımına göre yapılmış bir eğim tasarımını göstermektedir. hareket ederken konumunu değiştirin. Farklı yüksekliklerde bulunan konveyörler (2 ve 3) arasına monte edilmiş bir rafa (1) monte edilmiştir. Devirmeli transfer mekanizması, dönme tahrikli bir ürün kavrama mekanizması ile donatılmış dört bağlantılı bir menteşe şeklinde yapılmıştır. Aktarma mekanizması, rafın (1) deliklerindeki yataklara monte edilmiş bir eksen (4) ve bir mil (5), bunlara bağlı kollar (6 ve 7) ve milin (5) karşı ucuna monte edilmiş bir karşı ağırlık (8), üzerine monte edilmiş bir dişliden (9) oluşur. şaft (5) ve bir kremayer (1) üzerine monte edilmiş bir hidrolik silindir çubuğu (11) ile sağlam bir şekilde bağlanan bir kremayer (10) ile iç içe geçmiştir. Kolların (6 ve 7) karşıt uçları, bir dişli şaft (14) ve bir eksen vasıtasıyla mahfazanın (13) içine dönebilir şekilde monte edilmiştir. Şekil 15'te, dişli şaftı (14), kavrama mekanizması ürününün dönme tahrikinin şaftına (16) serbestçe monte edilmiş ve ona bir sürücü (21) ve bir flanş (20) aracılığıyla bağlanan bir dişli (22) ile birleşir. Ürün tutucusu şu şekilde yapılır: Şaft (17) üzerine sağlam bir şekilde monte edilmiş ve şaftın (17) dönüşünü sınırlayan iki durdurucu (30 ve 31) içeren bir pimin (29) dişlinin (22) halka şeklindeki oluğunda (23) bulunan bir blok (24), hareketli durdurucular (25 ve 26) ve yaylar (27 ve 28) içeren yay cihazı.
Cihaz aşağıdaki gibi çalışır. Başlangıç konumunda silindirik cam şeklindeki ürün, üst konveyörün (2) silindirleri (32) üzerine yerleştirilir ve parmak (29) deliğine sokulur. Ürünü alt konveyöre (3) aktarmak için, hidrolik silindir (11) açılır ve rafa (10) sıkı bir şekilde bağlanan çubuğu geri çekilirken, dişli (9) saat yönünde döner ve şaftı (5) aynı yönde döndürür, bu da kolu (7) döndürür aktarma mekanizmasının mahfaza (13) ve parmak (29) üzerinde yer alan ürünle birlikte düz - paralel bir hareket yapmasıyla sonuçlanan ürün yatay konumda konveyöre (3) girer. Kolların (6 ve 7) dönmesiyle eş zamanlı olarak ürün, kollara (6 ve 7) iletilen kolların (6 ve 7) salınımının neden olduğu dişli milinin (14) dönmesi nedeniyle oluşan 180 derecelik bir açıyla dikey eksen etrafında döner. dişli (22) ve ardından konik dişliler (18 ve 19) aracılığıyla, üzerine pimin (29) sabitlendiği mile (17) doğru hareketin başlangıcında ürünün dikey bir eksen etrafında dönerken silindirlere (32) temas etmemesi sağlanır. üst konveyör (2) ve aralarında garantili bir boşluk sağlamak için, dişli şaftını (14) döndürürken, yayın (27) ilk sıkıştırılması sırasında şaft (16 22) üzerine monte edilmiş bir dişli çark, pim ile şafta (17) dönüş iletmeden serbestçe döner. Ürün konveyörün (2) üzerine kaldırıldığında, hareketli durdurucu (25), sıkıştırılmış yayın (27) etkisi altında, kuvveti sürücüye (21) iletir, böylece şaftın (16) konik dişliler (18 ve 19) boyunca dönmesine neden olur. , mil 17 ve pim 29. Ürünü konveyör 3 üzerine monte ettikten sonra tahriki açılır (Şekil 32'de gösterilmemiştir) ve ürün pim 29'dan ayrılır ve gerekli yönde hareket eder. Üründen serbest bırakılan eğim, orijinal konumuna geri döner ve hidrolik silindir (11) açılır; raflı (10) çubuğu, şaft (5) ile dişliyi (9) uzatır ve döndürür, bunun sonucunda gövdeli (13) kollar (6 ve 7) ve pin 29 aynı yönde dönüyor. Bu durumda, pim (29) ile birlikte şaft (17), yay (28) ve hareketli durdurucu (26) tarafından gerçekleştirilen, ters yönde 180 derecelik bir açıyla döner.

Pirinç. 33. Krank-biyel mekanizmasının tasarımı, kaydırıcının belirli bir süre içinde alçaltılmış olanla karışmasını sağlar.
Hız sabite yakın.
Şek. Şekil 33, kaydırıcının belirli bir süre boyunca sabite yakın düşük bir hızda hareket etmesine olanak tanıyan bir kaldıraç-krank sistemi ile birleştirilmiş bir krank mekanizmasının tasarımını göstermektedir. Bu mekanizma, destek muyluları (2) çerçeve üzerindeki yataklara monte edilmiş bir krank mili (1), krank milinin (1) krank pimi üzerine eksenel olarak monte edilmiş ve bir kol ile eksenler (6) aracılığıyla bağlanan bir çift kollu kol (3) içerir. biyel kolu (4) ve bir sürgü (5) ve diğer kol ile sürgüye (8) monte edilmiş, eksen (9) üzerinde sallanan bir çubuk (7) ile, çubuk (7) eksen (12) nedeniyle külbütör kolu (11) ile dönel olarak bağlanmıştır, eksen (10) vasıtasıyla çerçeveye monte edilir. Sürgü (5) aşağı doğru hareket ettiğinde, külbütör kolu (11), çubuk (7) ve sürgüden (8) oluşan külbütör kolu sistemi, iki kollu kolun (3) etrafında ek bir dönüş gerçekleştirir. krank milinin (1) krank pimini saat yönünde çevirin, bu da belirli bir noktada kaydırıcının hızının yavaşlamasına ve değerinin sabite yakın hale gelmesine neden olur. Kaydırıcının bu hareket modu, örneğin çizim gibi bir dizi teknolojik işlemi gerçekleştirirken gereklidir.
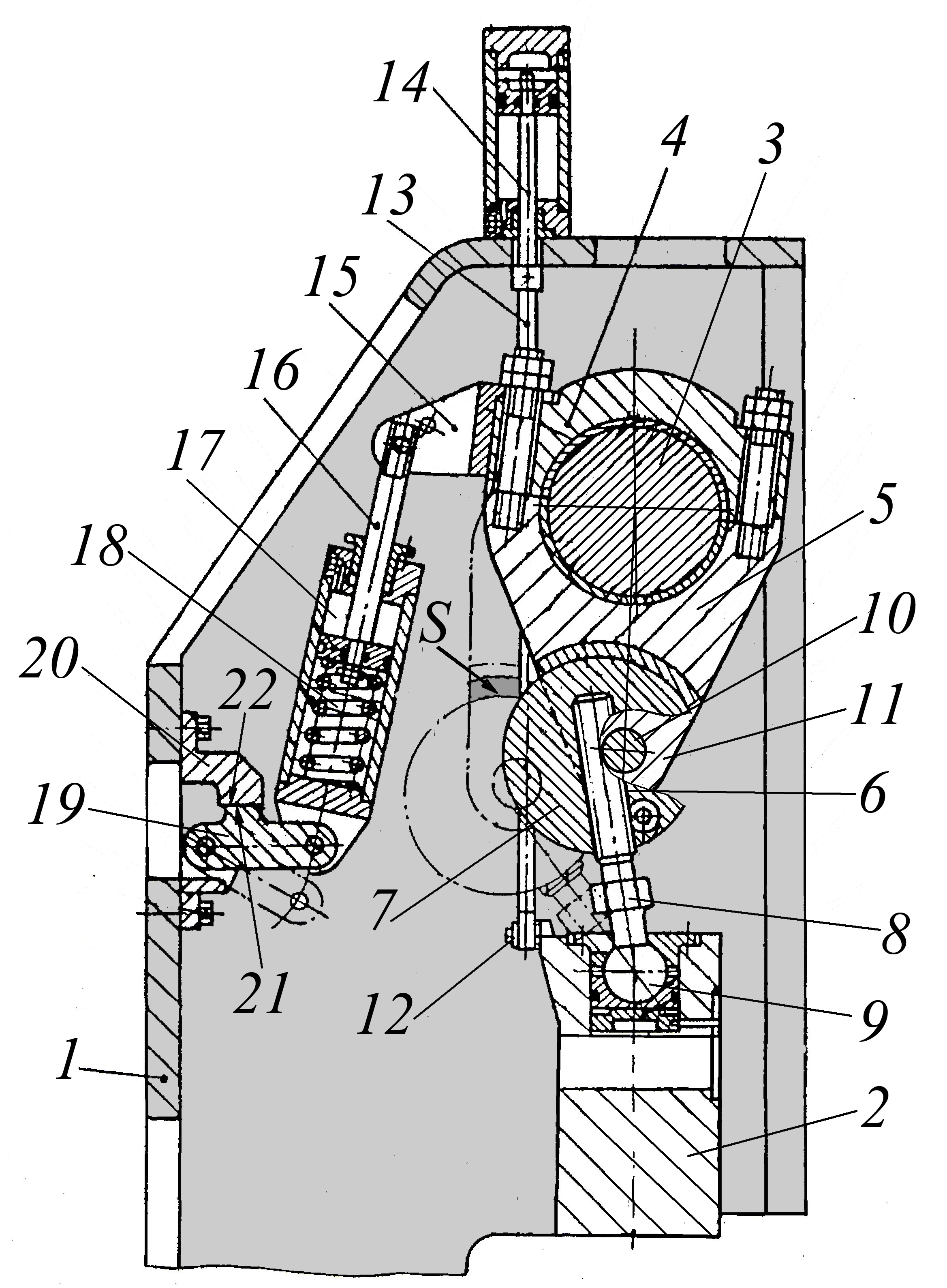
Şekil 34 Debriyajsız aktivasyon cihazlı presin krank-biyel kolu aktüatörünün tasarımı
Şekil 34, debriyajsız aktivasyon için bir cihazla birlikte presin krank-biyel kolu aktüatörünün tasarımını göstermektedir;
kırılma biyel kolu temelinde yapılmıştır. Çerçevenin (1) kılavuzlarına monte edilmiş, küresel bir menteşe (9) kullanılarak kaydırıcıya (2) bağlanan, krank milinden (3) monte edilmiş bir bağlantı çubuğu (4) aracılığıyla ileri geri hareket tahriki alan bir kaydırıcıdan (2) oluşur; bağlantı çubuğu (4) ise bir tahrik (5) ve tahrik edilen bir dirsek (6), bir menteşe bağlantısı oluşturan silindirik yüzeyler, ikincisi bir disk (7) ve bir ayar vidasından (8) oluşur ve disk (7), gözlerin (11) ilgili deliklerine yerleştirilmiş akslar (10) ile yapılır. Biyel kolunun (4) tahrik kısmı (5). Ek olarak, akslar (10), diskin (7) eksenine göre eksantrik olarak yerleştirilmiştir; bu, tahrikin (5) silindirik yüzeyleri ile kırma bağlantısının tahrik edilen (6) dizleri arasında bir boşluğun varlığını sağlar. Presin krank-biyel kolu mekanizmasının çalıştırılması sırasında gerekli olan çubuk 4. Kırma biyel kolu (4) kapalı konumda olsa bile, üst başlangıç konumunda olmasının garanti altına alınması için sürgü (2), bir eksen (12) ve bir çubuk (13) aracılığıyla dengeleme çubuğuna (14) bağlanır. Bir braket (15) Debriyajsız bir aktivasyon mekanizması olan kontrol pnömatik silindirinin (17) çubuğuna (16) eksenel olarak bağlanan biyel kolunun tahrik dirseğine (5) sağlam bir şekilde sabitlenirken, gövdesi presin arka duvarına monte edilmiş bir brakete (20) dönebilir şekilde bağlanmıştır. çerçeve (1), bir külbütör kolu (19) vasıtasıyla. Braket (20) bir çıkıntı (22) ile donatılmıştır ve külbütör (19), ara sıra etkileşim olasılığı olan bir çıkıntı (21) ile donatılmıştır.
Mekanizma şu şekilde çalışmaktadır. Elektro-pnömatik otomasyon sisteminden gelen komut üzerine krank milinin (3) sabit dönüşüyle, bunun sonucunda ve pnömatik silindir gövdesinin mafsallı bağlantısı sayesinde kontrol pnömatik silindirinin (17) çubuk boşluğuna basınçlı hava beslenir. Külbütör kolu (19), çubuğun (16) ve gövdenin karşılıklı zıt hareketleri meydana gelir, bu da külbütör kolunun (19) saat yönüne doğru dönmesine yol açar ve çıkıntısı (21), braketin (20) çıkıntısına (22) ve pnömatik çubuğun (16) karşısında durur. yayı (18) sıkıştıran silindir, dönel olarak bağlandığı braket (15) üzerinde etki eder ve böylece biyel kolunun (4) tahrik eden (5) ve tahrik edilen (6) kısmının kapalı bir konumda tutulmasını sağlar (Şekil 34'te gösterildiği gibi). Bu durumda, hareket krank milinden (3) kaydırıcıya (2) kapalı bir bağlantı çubuğu (4) aracılığıyla aktarılır. Elektro-pnömatik otomasyon sisteminden gelen komut üzerine kontrol pnömatik silindirinin (17) çubuk boşluğuna basınçlı hava beslemesi durdurulduğunda, Dönen krank milinin (3) etkisi ve dengeleyicinin (14) kuvveti altında, biyel kolu dirsekleri (5 ve 6) meydana gelir (4) ve menteşeyi oluşturan silindirik yüzeyleri, aksların (10) göreli olarak eksantrik montajı nedeniyle ortaya çıkan temastan çıkarılır. diskin (7) ekseni aralarında bir S boşluğunun oluşmasına kadar. Daha sonra biyel kolunun (4) dizleri (5 ve 6), onları bağlayan akslara (10) göre sallanma hareketi yapmaya başlar ve krank mili (3) sürekli dönerken dengeleyicinin (14) kuvvetinin etkisi altında kaydırıcı (2) en üst konum. Aynı zamanda, yayın (18) etkisi altında, kontrol pnömatik silindirinin (17) gövdesi serbestçe hareket eder ve alçalır ve külbütör kolu (19) saat yönünde döner. Pnömatik silindirin (17) gövdesi en alçak konumuna ulaştıktan sonra, döner krank milinden (3) hareket alırken braket (15) ve külbütör kolu (19) ile menteşe bağlantı noktalarına göre dönerek düz - paralel bir hareket yapmaya başlar. sabit bir hızda, çubuk boşluğu pnömatik silindirine (17) daha sonra basınçlı hava beslemesi ile kaydırıcı (2) bir çalışma stroku yapar.
Vites kolu mekanizmaları.
Kol mekanizmalarının dişlilerle kombinasyonu, her ikisi için de karakteristik olmayan yeni özelliklere sahip mekanizmalar oluşturmayı mümkün kılar. Çoğu zaman, bu tür mekanizmalar çıkış bağlantısının yüksekliğini elde etmek için kullanılır, ancak bazı durumlarda çıkış bağlantısının farklı hareket yörüngelerini elde etmenin yanı sıra hareketinin büyüklüğünü ve hızını değiştirmeyi de mümkün kılabilirler.
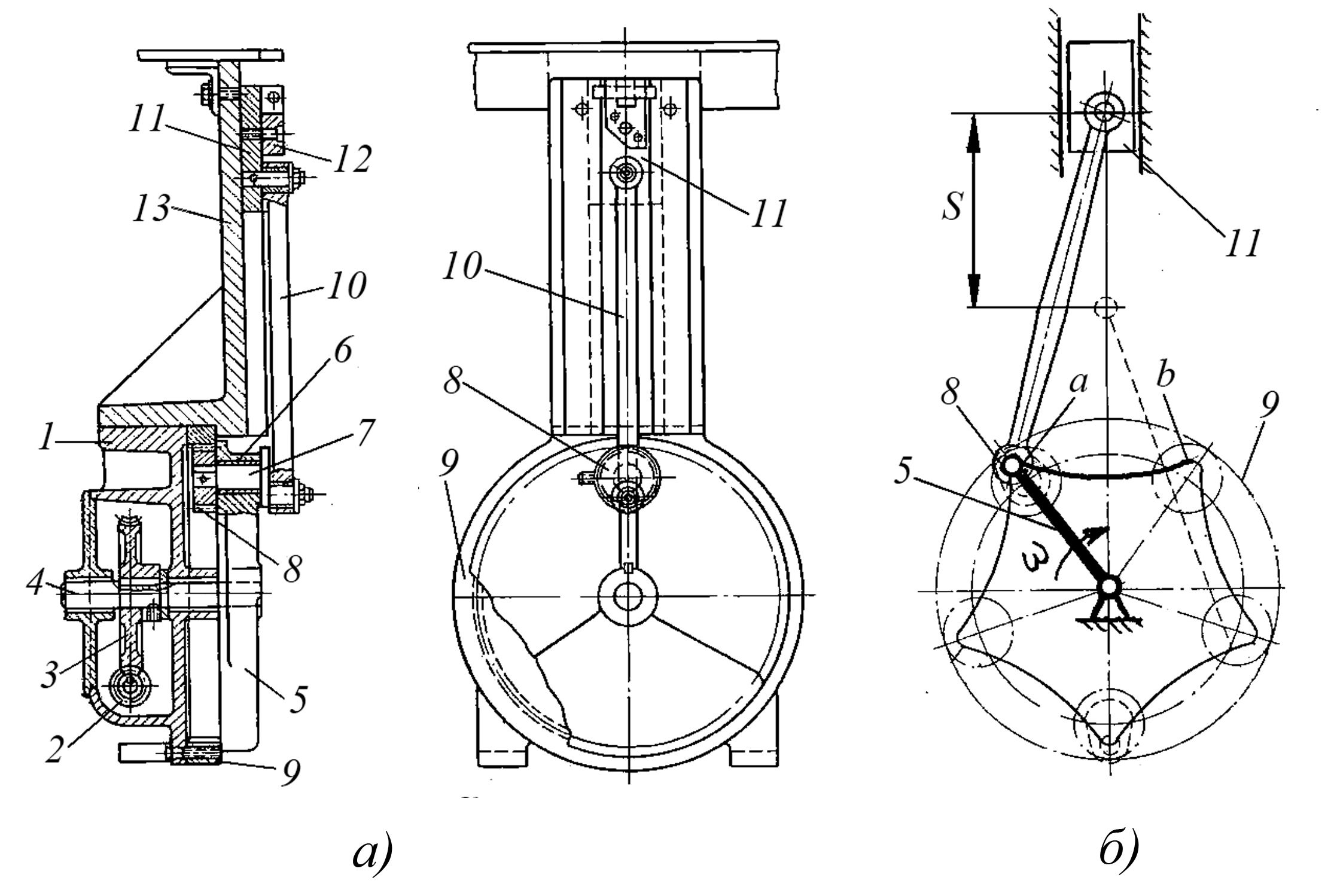
Şekil 35 Çıkış bağlantısı - aşırı ileri konumdaki kaydırıcının ayakta durmasını sağlayan vites kolu mekanizmasının tasarımı
Şekil 35, çıkış bağlantısı olan kaydırıcının aşırı ileri konumda tahrik bağlantısının - krankın belirli bir dönme açısında durduğu vites kolu mekanizmasının tasarımını göstermektedir. İçinde bir sonsuz dişlinin (2, 3) bulunduğu bir mahfazadan (1) oluşur ve tahrik edilen şaftı (4) üzerine, düz bir yüzeye eksantrik bir pimin (7) monte edildiği deliğe planet dişli taşıyıcısı olan bir krankın (5) sabitlendiği bir mahfazadan (1) oluşur. bir ucunda, mahfazaya (1) monte edilmiş taç çarkına (9) bağlanan bir uydunun (8) sağlam bir şekilde sabitlendiği ve diğer ucu, hareket eden kaydırıcıya (11) ileri geri bir hareket sağlayan bağlantı çubuğuna (10) dönebilir şekilde bağlanan bir yatak (6) çerçevenin (13) kılavuzlarında (12). Bu durumda, pimin (7) eksantriklik değeri, uydunun (8) ana dairesinin yarıçapından çok daha azdır. Cihazın çalışmasındaki bir duraklama sırasında, eksantrik pimi (7) hareket eder. yarıçapı, biyel kolunun (10) krank (5) ve kaydırıcı (11) ile bağlantısının eksenleri arasındaki mesafeye yaklaşık olarak eşit olan bir yay boyunca, bunun sonucunda kaydırıcıya hareket vermeden bir sallanma hareketi yapar (bkz. .35b). Cihazın bu kinematiği ile, eksantrik pimin (7) hareket yörüngesi, üzerinde kaydırıcının (11) en uç konumdaki duraklamasının bölüm tarafından ifade edildiği beş çıkıntılı kapalı bir eğridir. a-b grafikte. Kaydırıcının (11) duraklaması, biyel kolunun (10) uzunluğunun, yörünge bölümüne yakın şekildeki yayın yarıçapına eşit olması nedeniyle meydana gelir. a-b krank 5.
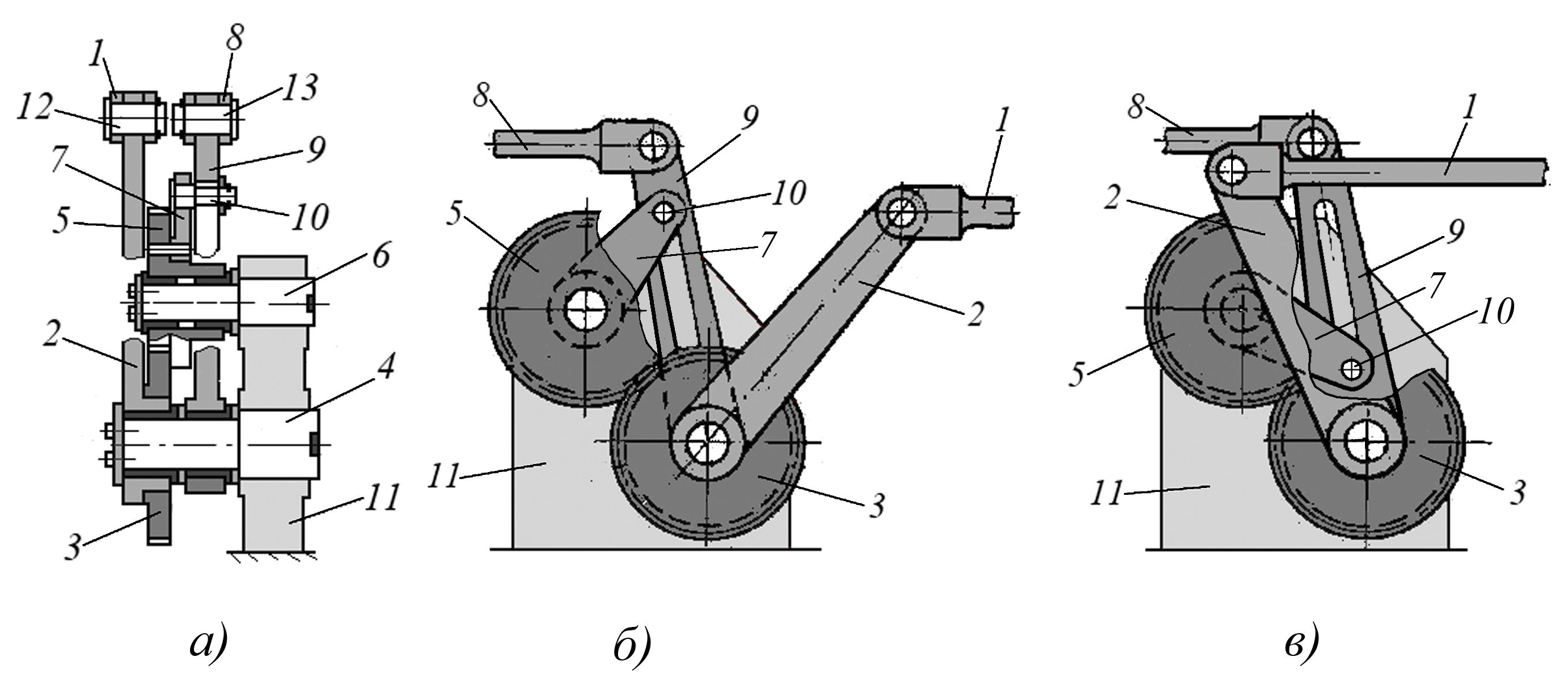
Şekil 36 Vites kolu mekanizmasının tasarımı, tahrik edilen baklanın tahrik eden baklaya göre iki kat daha fazla ileri geri hareketini elde etmeyi mümkün kılar.
Şekil 36, tahrik edilen bağlantının tahrik eden bağlantıya göre iki kat daha fazla ileri geri hareketini elde etmeyi mümkün kılan vites kolu mekanizmasının tasarımını göstermektedir. Bu tahrikin öncü elemanı, dişliye (3) bağlı olan ve bu tekerlek ile eksen (4) üzerinde serbestçe dönen kola (2) sallanma hareketi veren çubuk (1)'dir. Dişli (3), eksen (6) üzerine monte edilmiş kola (7) bağlı olan tekerleğe (5) dönüş sağlar. Sürgünün (9) oluğunda hareket eden pim (10) manivela (7), çubuğa (8) hareket verir. Eksenler (4 ve 6), çerçeveye monte edilmiş sabit bir mahfazaya (11) monte edilir. Şekil 36b,c'de çubuk 1, hareket döngüsünün başlangıcına ve ortasına karşılık gelen en sağ ve sol konumlarda gösterilmektedir. Her iki durumda da sürgü (9) aynı konumu işgal eder, çünkü tam bir döngüyü tamamlar ve orijinal konumuna geri döner. Kol 2, çubuk 1 tarafından Şekil 36a'da gösterilen konumdan sola hareket ettirilir, bunun sonucunda dişli 3, dönüşün belirli bir bölümünü gerçekleştirir. Tekerlek 3 ile iç içe olan dişli 5, aynı dönüşü ters yönde yapar. Tekerleğe (5) bağlı olan kol (7) onunla birlikte döner ve parmak (10), sürgünün (9) oluğu boyunca aşağı doğru hareket eder. Parmak (10), eksenin (6) merkezini geçmeden önce, sürgü sağa döner ve en uç konumuna ulaşır (bkz. Şekil 36c) . Çubuğun (1) daha fazla hareket etmesiyle, parmak (10) eksenin (6) merkezinin altına düşer ve sürgüyü (9) ters yönde, yani sola doğru hareket ettirir. Çubuk (1) en sol konuma ulaştığı anda, sürgü (9) de en sol konumunu alır ve çubuk (1) yalnızca ileri doğru bir hareket yaparken çift hareket yapar. Çubuk (1) ters vuruş yaptığı sırada bakla (9) başka bir çift vuruş yapar.
Şekil 37 Tahrik edilen milin periyodik dönüş açısını otomatik olarak değiştirmenize olanak tanıyan vites kolu mekanizmasının tasarımı.
Şekil 37, tahrik edilen milin periyodik dönüş açısını otomatik olarak değiştirmenize olanak tanıyan vites kolu mekanizmasının tasarımını göstermektedir. Üzerine bir dişlinin (2) ve bir mandallı tekerleğin (3) sağlam bir şekilde sabitlendiği tahrikli bir şaft (1) ve ayrıca dişli (2) dişli ile sürekli bağlantı halindeyken dönme olasılığı olan şaft (1) üzerine monte edilmiş bir külbütör kolu (4) içerir. Bu, külbütör kolu (4) üzerine bir eksen (12) aracılığıyla dönebilir şekilde monte edilen ve bir eksen (13) aracılığıyla bir çubuğa (7) bağlanan ve daha sonra bir eksen (10) aracılığıyla tahrik çubuğuna (8) dönebilir şekilde bağlanan bir krank (6) taşıyan Şekil 5'te yer almaktadır. ek olarak, mandallı tekerlek (3) ile temas halinde külbütör koluna (4) yaylı bir mandal (11) monte edilir ve sürgüye (9) külbütör kolunun (4) uzunlamasına oluğu boyunca hareket edebilen bir eksen (10) monte edilir. Şekil 37a'da, kaydırıcı 9 en alt konumda gösterilir
Mekanizma şu şekilde çalışmaktadır. Karşılıklı bir hareket gerçekleştiren çubuk (8), külbütör koluna (4) bir sallanma hareketi verir. Çubuk (8) ileri doğru hareket ettiğinde, mandal (11), tahrik edilen şaftın (1) dişli çark (2) ile birlikte olması nedeniyle mandallı çark (3) ile birleşir. , külbütör kolu 4 ile birlikte sallanma hareketi yapar. Çubuk ters yönde 8 hareket ettiğinde, mandal 11 mandallı çarkın dişleri boyunca kayar ve tahrik edilen mil 1, dişli 2 ile birlikte sabit kalır. Külbütör kolunun (4) ters hareketi sırasında, bu sırada sabit dişli çark (2) boyunca yuvarlanan dişli (5), eksen (12) üzerinde döner ve çubuğa (7) menteşeli bir şekilde bağlanan krankı (6) döndürür. buna paralel hareket eder ve ikincisi aynı zamanda kaydırıcıyı (9) külbütör kolunun (4) oluğunda hareket ettirir, bunun sonucunda eksenden (10) şafta (1) olan mesafe artar. Bu durumda dişli 2 ile dişli 5 arasındaki dişli oranı ikiye eşit seçildiğinden, kranklı 6 dişli 5 180 derecelik bir açıyla döner ve kaydırıcı 9, külbütör 4'ün oluğundaki en üst konumu işgal eder (bkz. Şekil 37b). ). Bu nedenle, çubuğun (8) bir sonraki ileri vuruşu sırasında, salınım yarıçapındaki artış nedeniyle külbütör kolunun (4) ve buna bağlı olarak tahrik edilen milin (1) dönme açısı daha az olacaktır. Çubuk (8) ters yönde hareket ettiğinde ve külbütör kolu (4) döndüğünde, sabit dişli (2) boyunca yuvarlanan dişli (5), tekrar 180 derecelik bir açıyla dönecek, kaydırıcı (9), Şekil 37a'da gösterildiği gibi orijinal alt konumunu alacaktır. , bundan sonra mekanizmanın çalışma döngüsü tekrarlanacaktır.
 Şekil 38 Doğrusal hareket için vites kolu mekanizmasının tasarımı.
Şekil 38 Doğrusal hareket için vites kolu mekanizmasının tasarımı.
Çalışmada mekanizmaların (kinematik, enerji, güç, mukavemet) ve bunların ana yapısal elemanlarının (eksantrik ve krank milleri, biyel kolları, kaydırıcılar, kollar, menteşe bağlantıları) hesaplamaları verilmiştir.
Son 20-25 yılda makine mühendisliğinde teknolojik ekipmanların tasarımı da dahil olmak üzere, öncelikle tahrik tipi ve kontrol sistemi ile ilgili değişikliklere rağmen, kaldıraç mekanizmaları benzersiz avantajları nedeniyle yaygın olarak kullanılmaya devam etmektedir. Bu avantajlar, kaldıraç mekanizmalarının, yüksek çalışma hızlarında, aktüatörün çıkış bağlantısının belirli bir hareket yörüngesinin elde edilmesine ve ayrıca ekipmanın çalışma döngüsünün belirli bir süresi boyunca darbeli teknolojik yüklerin mevcudiyetine izin vermesi gerçeğinde yatmaktadır. gerekli gücü en aza indirmek için özellikle krank mekanizmasının özelliklerini kullanmak. Ek olarak, kaldıraç mekanizmaları, basit yapısal elemanları kullanarak, çıkış bağlantısının strok sayısını arttırmayı, sürücünün hareketini arttırmadan çıkış bağlantısının strokunun büyüklüğünü değiştirmeyi ve ayrıca bir dizi sorunu çözmeyi mümkün kılar. diğer sorunlar. Aynı zamanda, ne bir hidrolik ne de programlanabilir bir elektromekanik tahrik, bu konuda manivela mekanizmalarıyla rekabet edemez, bu da manivela mekanizmaları için oldukça geniş bir uygulama yelpazesini belirler.
EDEBİYAT.
1. Ignatiev N.P. Azov tasarımının temelleri 2011.
2. Ignatiev N.P. Mekanizmaların tasarımı Azov 2015.
Makale, yazarın çalışmasının ilgili bölümlerinden alınan bilgilere dayanılarak yazılmıştır. "Tasarım Temelleri" 2011 yılında yayınlanan ve yazarın çalışması "Mekanizma Tasarımı", 2015 yılında yayınlandı.
Referans ve metodolojik kılavuzda "Mekanizma Tasarımı" Kaldıraç mekanizmalarının tasarım örneklerine ek olarak şunları içerir:
– Kam mekanizmaları, aralıklı mekanizmalar ve kombine mekanizmaların kullanımına yönelik tasarım örnekleri ve öneriler,
- yukarıdaki mekanizmaların ana parça türlerinin kullanımına ilişkin tasarım örnekleri ve öneriler: krank milleri, bağlantı çubukları, kaydırıcılar, kaldıraçlar ve külbütör kolları, kamlar ve bunların menteşe bağlantıları,
– mekanizma tahrikinin tipinin seçimine ilişkin öneriler ve uygulama örnekleri,
– mekanizmaların hesaplamaları,
– bir kam makinesinin çalışmasının siklogramının oluşturulmasına bir örnek,
– mekanizmaları tasarlama metodolojisi,
– mekanizmalara ve bunların tipik parçalarına doğruluk gereksinimlerinin atanmasına ilişkin öneriler,
– karmaşık bir orijinal mekanizma tasarlama örneği
Yazının tam sürümünü satın almak için sepetinize ekleyin,
Makalenin tam sürümünün maliyeti 80 ruble.
Modern makine mühendisliğinde daha düşük kinematik çiftlere sahip kaldıraç mekanizmaları yaygınlaşmıştır. Bu tür mekanizmaların avantajları şunları içerir: yüksek üretilebilirlik, kinematik bağlantılarda rulman kullanma olasılığı, temas yüzeylerinde az aşınma ile büyük kuvvetleri iletme yeteneği, çalışma sırasında güvenilirlik ve dayanıklılık. Bu mekanizmalar, kam mekanizmalarından farklı olarak kinematik çiftlerin sürekli kapanmasını sağlayan cihazlara ihtiyaç duymaz.
Teknolojik sürecin gereksinimlerini karşılayacak koşullardan mekanizmalar yaratılır. Mekanizma tasarımı, çözümü iki aşamaya ayrılabilen karmaşık bir iştir. İlk aşama mekanizmaların sentezi, çıkış bağlantısının gerekli tipini ve hareket yasasını ve mekanizmaların çalışabilirliği için genel koşulları sağlayan kinematik bir diyagramın seçilmesinden oluşur. İçinde ikinci aşama Mekanizmanın gücünü ve güvenilirliğini sağlamak için yapısal bağlantı biçimleri ve kinematik çiftler geliştirilmektedir. Kursumuz yalnızca ilk aşama sentez.
Mekanizma tasarımı genellikle verilen spesifik koşullarla ilgili deneyime dayanarak seçilir. Daha sonra belirleyin sentez parametreleri, yani gerekli yörüngeleri vb. sağlayan bağlantıların uzunlukları ve noktaların koordinatları ve ayrıca Ek sentez koşulları.
Ek sentez koşulları şunları içerir: krankın varlığı koşulu ve ayrıca kuvvet aktarma koşulu.
Kuvvet aktarım koşulu
Makinelerdeki kuvvet aktarımının kalitesi genellikle bağlantıların yerçekimi kuvvetleri ve atalet kuvvetleri dikkate alınmadan belirlenen basınç açısı λ ile karakterize edilir.
Basınç açısı λ'dır bitişik hareketli bağlantının yanından tahrik edilen bağlantıya etki eden kuvvetin vektörü ile bu kuvvetin uygulama noktasının mutlak hızının vektörü arasındaki dar açı.
Hareket iletim açısı γ 90°'ye kadar basınç açısını tamamlar:
γ = 90° – λ .
Metrik sentez aşamasında, izin verilen maksimum basınç açıları [λ max ] ve hareket iletimi [γ min ], kural olarak bunları alarak sınırlıdır:
Kayar tahrikli bağlantı için [λ max ] ≤ 30° ve [γ min ] ≥ 60° ve
[λ max ] ≤ 40°...45° ve [γ min ] ≥ 50°...45° – dönen tahrikli bağlantı için.
Tahrik momentlerinin etkisi altında dengede olan dört çubuklu mafsallı bağlantıda kuvvetlerin aktarılması koşulunu ele alalım. M D ve direnç momenti M C (Şekil 3.1). Basınç açısı λ, faydalı direnç kuvveti arasındaki ilişkiyi karakterize eder. F 23 çünkü λ direnç anının üstesinden gelmek M ve kuvvetle F 23, eşit
F 23 = MİLE /( ben Güneş∙ çünkü λ).
Şekil 3.1. Dört çubuklu mafsallı bağlantıdaki basınç açısı λ
Basınç açısı arttıkça daha fazla kuvvet uygulanmalıdır F 23 aynı direnç anının üstesinden gelmek için. Bu, kinematik çiftlerdeki reaksiyonların artmasına ve mekanizmanın etkinliğinin azalmasına yol açar.
Mekanizma hareket ettikçe basınç açısı değişir. Dört çubuklu bir menteşede bu açı, krankın bulunduğu konumlarda aşırı değerlere ulaşır. OA standla aynı düz çizgide yer alır İşletim Sistemi(Şekil 3.2).
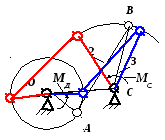
Şekil 3.2. Mekanizmanın basınç açılarının ulaştığı konumlar
aşırı değerler
Bir krank-kaydırma mekanizmasında basınç açısı, Şekil 2'de gösterilen konumlarda aşırı değerler alır. 3.3 kranklandığında OA kaydırıcının yörüngesine dik İÇİNDE.

Pirinç. 3.3. Basınç açılarının olduğu mekanizmanın konumları
ekstrem değerlere sahiptir.
Aşağıda ders projelerinde mekanizmaların kinematik sentezinin en yaygın sorunlarını ele alıyoruz.
Ortalama hızdaki değişim katsayısına ve külbütör kolunun iki uç konumuna dayalı dört çubuklu mafsallı bağlantının sentezi
Katsayı k Sürülen bağlantının ortalama hızındaki değişiklik şuna eşittir: k = V C 2 – 1 / V C 1 – 2 ,
Nerede V C 1 – 2 − bir noktanın ortalama doğrusal hızı İLE(Şekil 3.4) çalışma stroku sırasında, V C 2 – 1 − ters vuruş için de aynısı.
Kabul edelim k> 1, çünkü mekanizmaları tasarlarken, kural olarak, başlangıç pozisyonuna dönme süresi çalışma strok süresinden daha az olarak alınır, bu nedenle k > 1.
bunu kanıtlamak zor değil k= (180° + θ) /(180° – θ).
θ = 180° nerede ( k −1) /(k +1),
nerede q − biyel kolu konumları arasındaki açı M.Ö.çalışma strokunun başında ve sonunda.
Aşağıdaki gösterimi tanıtalım:
ben 1 – krank uzunluğu AB,(bkz. Şekil 3.4); ben 2 – biyel uzunluğu Güneş;
ben 3 – külbütör uzunluğu CD; ben 4 – destekler arasındaki mesafe (stand uzunluğu AD).

Pirinç. 3.4. Belirtilen açıların değerlerine karşılık gelen konumlardaki mekanizmanın diyagramı ψ
ψ 1 ve ψ 2 açıları ve katsayı göz önüne alındığında k, külbütör kolunun iki uç konumunu tasvir edelim CD(Şekil 3.5).
Puanlar İLE 1 ve İLE 2'yi düz bir çizgiyle bağlayalım. Biyel kolunun uç konumları arasındaki q açısını hesaplayalım. Güneş. bu noktada İLE 2 γ = 90° açısını oluşturun −
θ ve noktadan İLE 1 çizgiye dik olanı indirin İLE 1 İLE 2 noktasından çizilen bir çizgiyle kesişene kadar İLE 2 ve γ açısını oluşturuyor. Bu doğruların kesişme noktasını gösterelim. HAKKINDA. Açıkçası, bir dik üçgende OİLE 1 İLE 2 köşe İLE 1 İşletim Sistemi 2 = θ. Üç noktaya kadar O, İLE 1 ve İLE 2'de bir çember tanımlıyoruz. Köşesi noktada olan yazılı açı HAKKINDA bir yay üzerinde duruyor  ve θ açısına ve aynı yayı temel alan tüm yazılı açılara eşittir. Merkezi noktası olan bir daire seçelim HAKKINDA keyfi nokta A ve onu noktalarla düz bölümlerle birleştirin İLE 1 ve İLE 2. Sonuç olarak krank desteğinin noktaya yerleştirilmesi A, aşırı konumlardaki dört çubuklu mekanizmanın bir diyagramını elde ederiz (bkz. Şekil 3.5).
ve θ açısına ve aynı yayı temel alan tüm yazılı açılara eşittir. Merkezi noktası olan bir daire seçelim HAKKINDA keyfi nokta A ve onu noktalarla düz bölümlerle birleştirin İLE 1 ve İLE 2. Sonuç olarak krank desteğinin noktaya yerleştirilmesi A, aşırı konumlardaki dört çubuklu mekanizmanın bir diyagramını elde ederiz (bkz. Şekil 3.5).

Pirinç. 3.5. k katsayısına göre dört çubuklu menteşe sentezi
ortalama hızdaki değişiklikler ve külbütörün iki aşırı konumu
Aşağıdaki şekilden klima 1 = İÇİNDE 1 İLE 1 −AB 1 = ben 2 − ben 1 ; klima 2 = İÇİNDE 2 İLE 2 −AB 2 = ben 2 + ben 1 .
Nerede ben 1 = 0,5 (klima 2 −klima 1) μ ben / 2; ben 2 = klima 2 − ben 1 .
Stand uzunluğu AD = ben 4 noktanın konumuna göre belirlenecektir A.
Noktanın konumundan bu yana A keyfi olarak seçildiğinde, problemin çok değişkenli bir çözümü vardır. Bu, örneğin kuvvet aktarımının durumu, desteklerin koordinat eksenine göre eksantrikliğinin varlığı veya yokluğu gibi ek koşullar eklemenizi sağlar.
Külbütör mekanizmasının sentezi katsayık değişiklikler
sahnelerin ortalama hızı
Verilen: katsayı k hızdaki değişiklikler ve noktanın iki uç konumu İÇİNDE kulis Güneş.
Külbütör mekanizmasını iki uç konumda ele alalım (Şekil 3.6).

Pirinç. 3.6. Külbütör mekanizmasının sentezi
Krank konumu arasındaki açı OA 2 ve krankın pozisyonda devamı OA 1 eşittir θ = 180° ( k −1) /(k+1). Açılar İÇİNDE 1 C B 2 ve q, kenarları birbirine dik olan açılar gibi birbirine eşit olacaktır.
Düz bir çizgi üzerinde İÇİNDE 1 İÇİNDE 2 tepe noktasında bir açı olan bir ikizkenar üçgen oluşturun İLE q açısına eşit. q açısını rastgele bir noktada ikiye bölen düz bir çizgi üzerinde bir nokta seçin HAKKINDA Krankın etrafında döndüğü yer OA. Noktadan düşme HAKKINDAçizgiye dik İÇİNDE 1 İLE(veya İÇİNDE 2 İLE), krankın uzunluğunu bulun OA. Ortaya çıkan külbütör mekanizması belirtilen koşulları karşılayacaktır. Külbütör mekanizmasının verilen şartlara göre yapımı şu şekilde gerçekleşir. Puanlar İÇİNDE 1 ve İÇİNDE Konumu verilen 2'yi düz bir çizgiyle birleştiriyoruz.
Krank-kaydırıcı mekanizmasının sentezi
Aşağıdaki kuralları kabul edelim (Şekil 3.7):
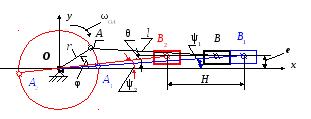
Pirinç. 3.7. Krank kaydırma mekanizmasının şeması
R– krank uzunluğu OA;N– kaydırıcının hareketi; ben– biyel uzunluğu AB;
e– disaksiyel, yani nokta yörünge ofseti İÇİNDE eksene göre kaydırıcı Ah ;
L = ben/ R– biyel kolunun bağıl uzunluğu;
ν = e/R– göreceli eksenel olmayan;
H = H/ R– kaydırıcının göreceli stroku ;
λ max – maksimum basınç açısı (bkz. Şekil 3.3);
k − kaydırıcının ortalama hızındaki değişim katsayısı (bkz. § 3.1)
ψ 1 ve ψ 2 - krankın oluşturduğu dar açılar OA yön ile Ah kaydırıcının en uç konumlarında: φ 1 =  İÇİNDE 1
Ah, φ 2 = İÇİNDE 2
Ah
;
İÇİNDE 1
Ah, φ 2 = İÇİNDE 2
Ah
;
θ = ψ 2 – ψ 1 – sürgünün en uç konumlarındaki bağlantı çubukları arasındaki dar açı.
Görev 1. Verilen: Olumsuz, L = ben/ R.
Bulmak: R; ben; ׀λ maksimum ׀.
Krank uzunluğu OA: R = H / H. AB: ben = L R.
Biyel uzunluğu L] .
Basınç açısının en büyük değeri ׀ λ max ׀ = arc sin [(1 + ν) / Verilen: Görev 2.k, L= ben/ R.
Bulmak: N, R; ben; e;
׀ λ maks ׀.
Kaydırıcının aşırı konumlarındaki bağlantı çubukları arasındaki dar açı k–1)/(k+1).
θ = 180 0 ∙(
H = {2∙} 0,5 .
İfadeden bağıl eksen dışı olanı buluyoruz
ν = [( H –2)∙(L 2 –1)] 0,5 .
Krank uzunluğu R = H/ H; biyel uzunluğu ben = L R; eksen dışı e =ν R.
Basınç açısının en büyük değeri λ max = ark sin [(1 + ν) / L].