Spakmekanisme- dette er en mekanisme dannet av lenker laget i form av stangformede spakstrukturer.
Spakmekanismer er utbredt i nesten alle typer maskiner.
2.1. KLASSIFISERING AV SPAKKMEKANISMER
Hele utvalget av spakmekanismer er klassifisert i henhold til typen kinematisk kjede og struktur.
Basert på typen kinematisk kjede, skilles to grupper.
Mekanismer med en lukket kinematisk kjede - dette er spakmekanismer -
nisms som inneholder i sin struktur kun lukket kinematisk
skikjeder (se fig. 1.6, fig. 2.1).
Mekanismer med åpen kinematisk kjede - Dette er spakmekanismer
mekanismer som inneholder i sin struktur kun åpne kinematiske kjeder (se fig. 1.4, c, fig. 2.7).
I de fleste tilfeller er spakmekanismer med en lukket kinematisk kjede planmekanismer, og spakmekanismer med en åpen kinematisk kjede er romlige.
Strukturen til spakmekanismer kan være elementær, enkel eller kompleks.
Elementære mekanismer– dette er mekanismer hvis struktur ikke kan deles inn i deler som er i stand til uavhengig å transformere bevegelse
(Fig. 2.3).
Enkle mekanismer– dette er spakmekanismer, hvis struktur består av en elementær mekanisme og en strukturell gruppe
(Fig. 1.6, Fig. 2.1).
Komplekse mekanismer– dette er spakmekanismer, hvis struktur består av en eller flere elementære mekanismer og to eller flere strukturelle grupper.
Komplekse spakmekanismer er delt inn i:
inn i samme type - dette er komplekse spakmekanismer, hvis struktur inneholder de samme elementære mekanismene og lignende strukturelle grupper av lenker;
multi-type - dette er komplekse spakmekanismer, hvis struktur inneholder forskjellige elementære mekanismer og forskjellige strukturelle grupper av lenker;
kombinert– dette er komplekse spakmekanismer, hvis struktur er dannet som et resultat av kombinasjonen av lignende og multi-type mekanismer.
Alle enkle spakmekanismer er flate mekanismer, som igjen er delt inn i grunnleggende typiske ordninger:
hengselmekanisme (se fig. 1.6, b);
2. SPAKKEGIR
2.1.
sveiv-glidemekanisme (se fig. 1.6, a); vippemekanisme (fig. 2.1, a); tangentiell mekanisme (fig. 2.1, b); sinusmekanisme (fig. 2.1, c).
De bevegelige leddene til flate spakmekanismer kan utføre både de enkleste typer bevegelser (rotasjons- og translasjonsbevegelser) og komplekse bevegelser.
Ris. 2.1. Blokkdiagrammer over typiske flate spakmekanismer
Lenkene som utfører rotasjonsbevegelser inkluderer sveiv, vippearm, vippe og svingglider.
En sveiv er et ledd til en spakmekanisme, som er en del av kun rotasjonskinematiske par og har evnen til å rotere rundt rotasjonsaksen i en vinkel på mer enn 360° (se fig. 1.6, fig. 2.1, lenke 1) .
En vippearm er et ledd av en spakmekanisme, som er en del av kun rotasjonskinematiske par og har evnen til å rotere rundt rotasjonsaksen i en vinkel på mindre enn 360° (se fig. 1.6, ledd 4).
Leddet er et ledd av spakmekanismen, som er en del av de rotasjons- og translasjonskinematiske parene og har evnen til å rotere rundt rotasjonsaksen i en vinkel på mindre enn 360° (fig. 2.1, lenke 5).
Vippende skyveknapp− dette er en kobling av en spakmekanisme, som danner et translasjonskinematisk par med en stang og et rotasjonskinematisk par med et stativ.
Alle presenterte lenker samhandler med stativet. I dette tilfellet er sveiven i de fleste tilfeller den innledende, angitte eller ledende lenken.
Linkene som utfører translasjonsbevegelser inkluderer glidebryteren, steinen og stangen.
Glideren er en lenke som danner et translasjonskinematisk par med stativet (se fig. 1.6, lenke 3).
Steinen er et ledd som danner et translasjonskinematisk par med lysbildet (fig. 2.1, lenke 6).
Stangen er et ledd som danner et translasjonskinematisk par med en svingende eller stasjonær glider (fig. 2.1, lenke 7).
Vevstengene er leddene som utfører komplekse bevegelser.
Teori om mekanismer og maskiner. Lærebok godtgjørelse |

2. SPAKKEGIR
2.1. Klassifisering av spakmekanismer
En koblingsstang er et ledd i en spakmekanisme som danner kinematiske par kun med bevegelige ledd som ikke har forbindelser med stativet
(se fig. 1.6, lenke 2).
2.2. STRUKTURELL ANALYSE AV LEVERMEKANISMER
Når man studerer strukturen til en hvilken som helst spakmekanisme, skilles to retninger: strukturell analyse og strukturell syntese.
Struktur analyse er prosessen med å studere strukturen til en mekanisme, dvs. bestemme antall lenker og typer bevegelser de utfører, antall og type kinematiske par, strukturelle grupper og kinematiske kjeder, antall mobilitet og tilstedeværelsen av defekter.
Strukturell analyse av mekanismer utføres for å identifisere defekter i deres struktur, som elimineres om nødvendig.
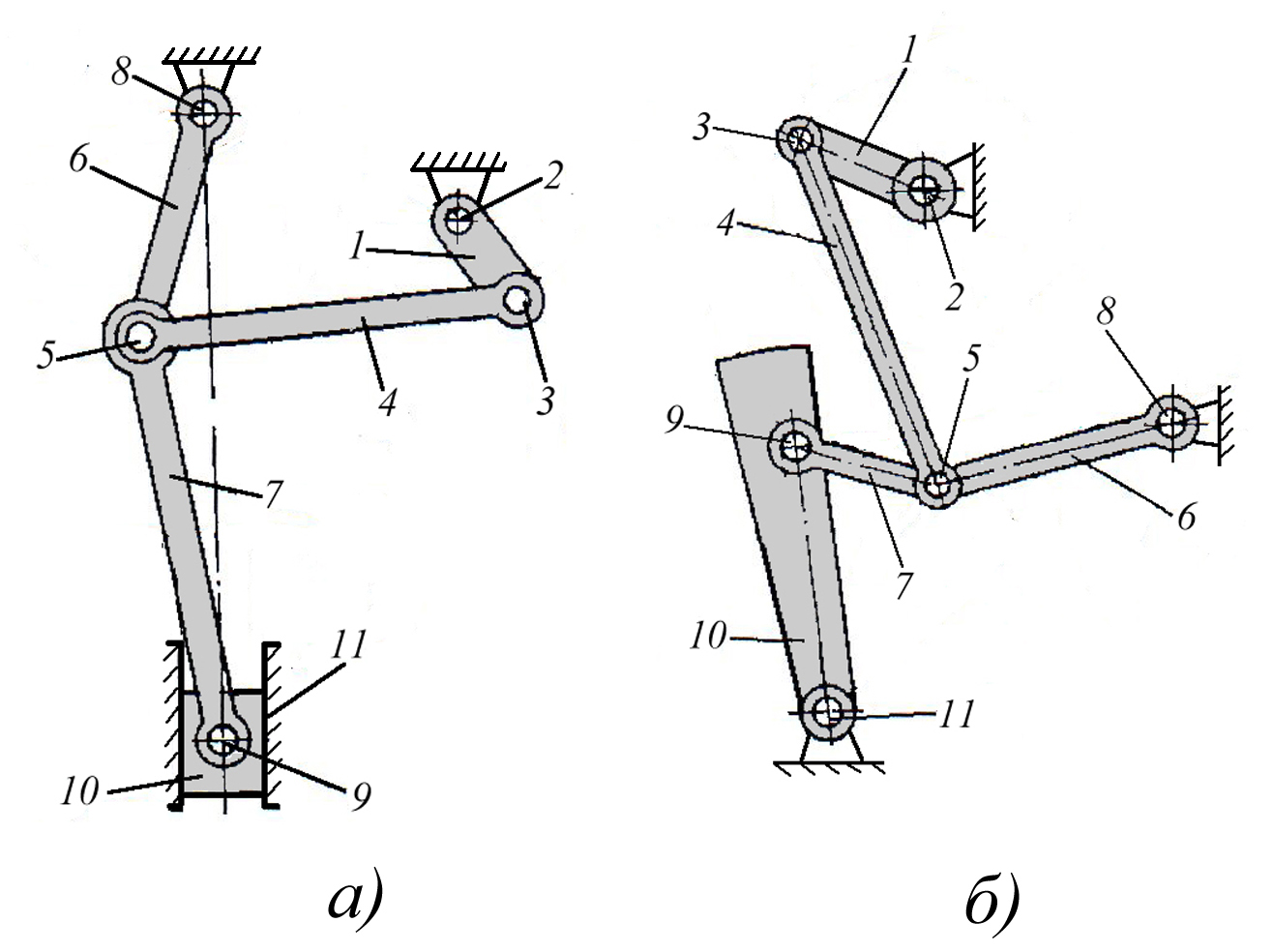
Som et eksempel på å eliminere (eliminere) strukturelle defekter, vurdere en flat spakmekanisme med en irrasjonell struktur (se fig. 1.12, a). Denne mekanismen forblir operativ bare hvis lengdene på lenkene er i følgende forhold:
yakh: l OA = l BC,l AB = l DE = l OC ogl OD = l EC. Følgelig danner punktene til mekanismen figuren OABC, som alltid er et parallellogram. Deretter, uten å endre bevegelsene til mekanismeleddene, kan du fjerne koblingsstangen 2, siden denne koblingen, som danner kinematiske par med lenker 1 og 4 med hengselssentre ved punktene D og E, pålegger disse koblingsforholdene som ikke påvirker koblingen. arten av deres bevegelse. I dette tilfellet er forbindelsesbetingelsene pålagt av koblingsstangen 2 på leddene 1 og 4 passive eller overflødige. På sin side er mobiliteten til kinematiske par med hengselssentre ved punktene D og E et eksempel på lokal mobilitet, siden mobiliteten til de gjenværende leddene til mekanismen ikke vil endres i deres fravær. En lignende situasjon vil oppstå hvis koblingsstang 3 ekskluderes fra mekanismens struktur i stedet for koblingsstang 2.
For å eliminere strukturelle defekter, er det nødvendig å vite nøyaktig tilstedeværelsen av redundante eller passive forbindelser i mekanismekretsen og deres nummer. For å beregne antall redundante eller passive tilkoblinger brukes følgende forhold:
q =W o +W m +W,
hvor W o ,W m ,W – gitt, lokal og beregnet mobilitet.
Redundante, eller passive, forbindelser er kun tilgjengelig i lukkede kinematiske kjeder med flere kretser. Det er to typer kretser i mekanismer: avhengige og uavhengige. En krets er uavhengig hvis den skiller seg fra andre kretser med minst én kobling. Avhengige kretser duplisere hverandre, og koblingene som danner dem skaper overflødige, eller passive, forbindelser. Så strukturen til mekanismen presentert i fig. 1.12, inneholder flere kretser - OABC og ODEC. Konturene er avhengige, fordi de er dannet av samme mengde
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.2.
Og typer lenker. Samtidig fant vi tidligere ut at strukturen til denne mekanismen har defekter, det vil si at den inneholder redundante eller passive forbindelser og lokal mobilitet, noe som bekrefter tilstedeværelsen av avhengige kretser. Derfor, for å bestemme antall avhengige kretser, er det nødvendig å vite det totale antallet kretser av mekanismen. Antall kretser bestemmes ved hjelp av uttrykket
K = p−n,
hvor p er antall kinematiske par i mekanismens struktur, n er antall bevegelige ledd i mekanismen,
n = k− 1,
her er k det totale antallet mekanismeledd, inkludert stativet.
Etter å ha ekskludert strukturelle defekter, bestemmes antall strukturelle grupper, antall og type kinematiske par, antall hovedmobiliteter, og deretter, starter med utgangslenken, skilles grupper av lenker fra sammensetningen av mekanismen, som sammen ha en mobilitet lik null. I dette tilfellet er det nødvendig å sikre at koblingene som er igjen i mekanismen, ikke mister forbindelsen med den ledende lenken.
Generelt kommer den strukturelle analysen av spakmekanismer ned til å løse følgende problemer:
for romlige mekanismer:
2) bestemme mekanismens manøvrerbarhet.
for flate mekanismer:
1) bestemmelse av mekanismemobilitet;
2) analyse av sammensetningen av mekanismestrukturen.
Etter å ha undersøkt de presenterte problemene med strukturell analyse, kan vi merke likheten til det første problemet for begge typer spakmekanismer. Samtidig forfølger de andre oppgavene, til tross for noen forskjeller i formulering, det samme målet - å identifisere tilstedeværelsen av strukturelle defekter.
Mobilitet av mekanismer
Mekanismens mobilitet– dette er antallet uavhengige generaliserte koordinater som unikt bestemmer posisjonene til mekanismekoblingene på et plan eller i rommet på det aktuelle tidspunktet.
Strukturelle formler for å bestemme mobiliteten til romlige mekanismer ble oppnådd av P. I. Somov, og for flate mekanismer - av P. L. Chebyshev. Begge strukturformlene er basert på de samme prinsippene for deres konstruksjon, og derfor kan strukturformlene representeres som
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.2. Strukturell analyse av spakmekanismer
W = H n+ ∑ (H− i) pi ,
i= 1 n
hvor H er antall grader av mobilitet (for romlige mekanismer H = 6, for flate mekanismer H = 3 p i antall kinematiske par av mobilitet;
i er antall mobilitet til det kinematiske paret. Strukturformler har to former for skriving: 1) i klasser av kinematiske par:
for flate mekanismer formelen til P. L. Chebyshev:
W = 3 n− 2 p5 − p4 ,
W =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1 ,
hvor p 5 , p 4 , p 3 , p 2 , p 1 – antall kinematiske par, henholdsvis av den femte, fjerde, tredje, andre og første klasse;
2) i grader av mobilitet av kinematiske par: for flate mekanismer, formelen til P. L. Chebyshev:
W = 3 n− 2 p1 − p2 ,
for romlige mekanismer formelen til P. I. Somov:
W =6 n −5 p 1 −4 p 2 −3 p 3 −2 p 4 −p 5,
her p 1 , p 2 , p 3 , p 4 , p 5 - antall kinematiske par som har henholdsvis en, to, tre, fire og fem mobiliteter.
Sammensetning av strukturen til spakmekanismer
For å løse problemene med analyse og syntese av spakmekanismer foreslo professor L.V Assur en original strukturell klassifisering, ifølge hvilken mekanismer som ikke har redundante forbindelser og lokal mobilitet består av primære (elementære) mekanismer og strukturelle grupper av lenker (fig. 2.2. ).
Teori om mekanismer og maskiner. Lærebok godtgjørelse |

2. SPAKKEGIR
2.2. Strukturell analyse av spakmekanismer
Strukturell syntese
Mekanisme = PM+...+ PM+ SGZ+...+ SGZ
Struktur analyse
Ris. 2.2. Sammensetning av mekanismestrukturen i henhold til Assur
Primær mekanisme(PM) er en elementær mekanisme som består av bevegelige og faste ledd, som danner et kinematisk par med en eller flere mobiliteter (fig. 2.3).
Primære mekanismer | ||||||
med mobilitet W = 1 | med mobilitet W > 1 | |||||
Ris. 2.3. Primære mekanismer
I henhold til definisjonen er alle primære (elementære) mekanismer dannet av kombinasjonen av ett bevegelig ledd med et stativ og er førsteklasses mekanismer. I dette tilfellet tilsvarer klassen antall bevegelige lenker.
Strukturell gruppe av lenker(SGZ) er en kinematisk kjede som dannes
badet av bevegelige ledd av mekanismen, hvis mobilitet i rommet og på planet er null til enhver tid, og ikke brytes opp i enklere kjeder med lignende egenskaper
(ris. 2.4., Fig. 2.5., Fig. 2.6).
Opprinnelig dekket den strukturelle klassifiseringen av L.V. Assur bare flate spakmekanismer med rotasjonskinematiske par. Deretter forbedret professor I. I. Artobolevsky denne klassifiseringen, og utvidet den til flate spakmekanismer og med translasjonelle kinematiske par, som la grunnlaget for etableringen av teorien om strukturelle grupper, ifølge hvilken strukturgruppen er en kinematisk kjede med lavere kinematiske par som tilfredsstiller betingelsen
W s.g= 3 n s.g− 2 p 1− p 2= 0 ,
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.2. Strukturell analyse av spakmekanismer
hvor W s.g ,n s.g – mobilitet og antall bevegelige ledd i strukturgruppen
py; p 1 ,p 2 – antall kinematiske par med tilsvarende mobilitet. Et trekk ved strukturelle grupper er deres statiske usikkerhet
Begrensning Hvis en strukturell gruppe er festet til et stativ med frie elementer av lenker, dannes et statisk ubestemt fagverk. Ved å bruke denne egenskapen til strukturelle grupper er det praktisk å utføre strukturell, kinematisk og kraftanalyse av mekanismer. I alle strukturelle grupper er endeleddene kun en del av ett kinematisk par og har et fritt leddelement. Slike lenker kalles bånd.
Et bånd er det siste leddet i en strukturell gruppe, ett element er en del av ett kinematisk par og har et andre fritt element i lenken.
Strukturelle grupper kan kun dannes av et jevnt antall bevegelige enheter (se fig. 2.4 - 2.6). Graden av kompleksitet til en strukturell gruppe er preget av dens klasse. Klassen til en strukturell gruppe bestemmes av antall lenker og kinematiske par, tatt i betraktning antall toppunkter til den mest komplekse lenken. Kompleksiteten til strukturelle grupper bestemmer klassen til mekanismen. Følgelig bestemmes klassen av mekanismen av klassen til den mest komplekse strukturelle gruppen inkludert i sammensetningen. Innenfor en klasse er strukturelle grupper delt inn i ordrer. Rekkefølgen på strukturgruppen tilsvarer antall leads.
I strukturen til spakmekanismer er de vanligste strukturelle gruppene de som består av to ledd (2 og 3) og tre kinematiske par av den femte klassen (fig. 2.4). Disse strukturelle gruppene inneholder to bevegelige lenker med to toppunkter, som tilsvarer den andre klassen. Strukturelle grupper av den andre klassen har minst to bånd, noe som indikerer tilstedeværelsen av flere ordrer i klassen. For tiden er de mest utbredte strukturelle grupper av den andre klassen av andre orden, et karakteristisk trekk som er tilstedeværelsen av fem typer (fig. 2.4).
Typen av strukturell gruppe bestemmes av dens strukturelle formel, som er kompilert avhengig av typen og klassen av kinematiske par. Den strukturelle gruppen av den andre klassen av den andre orden (fig. 2.4, a) er dannet av to lenker, to ledninger og inneholder tre rotasjonspar av den femte klassen, har en strukturell formel BBB, som tilsvarer den første typen. Den andre typen gruppe av den andre klassen av andre orden (fig. 2.4, b) oppnås ved å erstatte et av de ekstreme rotasjonskinematiske parene med et translasjonspar av den femte klassen. Strukturformelen til den resulterende gruppen vil ha formen BNP eller PVV.
Teori om mekanismer og maskiner. Lærebok godtgjørelse |

2. HEFTMEKANISMER | |||||||||||
2.2. Strukturell analyse av spakmekanismer | |||||||||||
4 A 1 | |||||||||||
Ris. 2.4. Strukturelle grupper av andre klasse av andre orden | |||||||||||
Den tredje typen strukturell gruppe av den andre klassen av den andre orden (fig. 2.4, c) har strukturformelen til ERW og dannes på grunn av erstatning av det gjennomsnittlige rotasjonskinematiske paret med et translasjonspar av den femte klassen. Den fjerde typen grupper av den andre klassen av den andre orden (fig. 2.4, d) oppnås ved å erstatte begge ekstreme kinematiske rotasjonsparene i den femte klassen med translasjonspar, som tilsvarer strukturformelen til PVP. Ved å erstatte et av de ekstreme og midtre rotasjonskinematiske parene med translasjonsparene kan vi oppnå den femte typen gruppe av den andre klassen av andre orden (fig. 2.4, d), som har strukturformelen PPV eller VPP.
Mekanismer som bare inneholder andreklasses strukturelle grupper er andreklasses mekanismer.
Teoretisk er det strukturelle grupper av store klasser, men på grunn av deres lave prevalens i læreplanen vil vi begrense oss til strukturelle grupper av andre klasse.
Manøvrerbarhet av romlige spakmekanismer
De vanligste representantene for romlige spakmekanismer er manipulatorer (fig. 2.5, a).
En manipulator er en romlig spakmekanisme som utfører handlinger som ligner på en menneskelig hånd.
Manipulatorer er designet for å endre posisjonen til objekter. Koblingene til manipulatorer av industriroboter danner bare
lukkede kinematiske kjeder som inneholder kinematiske par av forskjellige klasser, noe som gjør at slike mekanismer kan ha større mobilitet enn enhet. Imidlertid er manipulatorer preget av evnen til å endre strukturen til mekanismen under driften. Avhengig av tjenesteformålet er to alternativer mulig.
Teori om mekanismer og maskiner. Lærebok godtgjørelse |

2. SPAKKEGIR
2.2. Strukturell analyse av spakmekanismer
Ris. 2.5. Diagram over industrirobotens manipulatormekanisme
Første alternativ: du må endre posisjonen til et stasjonært objekt (fig. 2.5, a). I det første øyeblikket ligger objektet hvis posisjon må endres på et stasjonært plan og er i ro. Følgelig pålegger objektet og planet visse forbindelser på hverandre. Videre, hvis forholdet mellom flyet og objektet ikke endrer sin kinematiske tilstand, kan de betraktes som en fast kobling, som er et stativ. I det tidsøyeblikket som tilsvarer fangsten av det aktuelle objektet av utgangslenken, blir også denne lenken ubevegelig og må betraktes som et element i stativet (fig. 2.5, b). Følgelig reduseres antallet bevegelige ledd i strukturen til mekanismen med én, og den åpne kinematiske kjeden som mekanismen hadde til dette øyeblikket blir lukket, noe som fører til en reduksjon i mobiliteten. I neste øyeblikk vil det være behov for å rive objektet vekk fra det stasjonære planet for å flytte det videre. For å utføre en slik handling må imidlertid manipulatoren, som i et gitt øyeblikk har en lukket kinematisk kjede, ha en mobilitet som er minst lik én. Så snart et objekt er skilt fra et fast plan, vil det miste sitt tidligere eksisterende forhold til dette planet, og i fremtiden må det vurderes sammen med utgangsleddet som ett bevegelig ledd. I øyeblikket for gjenoppretting av mobilitet av utgangslenken, blir den kinematiske kjeden til manipulatoren igjen åpen, noe som fører til den forrige mobiliteten til mekanismen og evnen til å flytte et objekt i henhold til en gitt lov.
Andre alternativ: du må installere delen i et hull med en viss form laget i en fast overflate. I tidspunktet som tilsvarer installasjonen av delens utgangsledd inn i hullet, forblir utgangsleddet bevegelig, og den kinematiske kjeden til manipulatoren lukkes (fig. 2.5, c). I dette tilfellet opprettholdes antallet bevegelige ledd, og mobiliteten til mekanismen endres proporsjonalt med mobiliteten til det nye kinematiske paret dannet av delen og den faste overflaten den er installert i. I øyeblikket avslutning av forbindelsen mellom utgangskoblingen og delen
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.2. Strukturell analyse av spakmekanismer
den kinematiske kjeden blir åpen, og mekanismen gjenoppretter sine egenskaper.
Fra de vurderte situasjonene følger det at det kun er mulig å sikre at manipulatoren fungerer hvis følgende betingelse er oppfylt:
m ≥ 1.
hvor m er manøvrerbarheten til manipulatoren.
Manøvrerbarhet er mobiliteten til manipulatoren med en stasjonær utgangskobling.
Manøvrerbarheten til romlige mekanismer bestemmes av uttrykket oppnådd basert på Somov-formelen:
m =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1
hvor alle koeffisienter er identiske med de som er presentert i § 2.3.
2.3. SYNTESE AV SPAKKMEKANISMER
Syntesen av mekanismer utføres i to trinn. Det første trinnet kalles strukturell syntese, og det andre kalles metrisk syntese. De generelle kriteriene som følges på hvert trinn er: minimere de totale vektegenskapene og kostnadene til mekanismen, samt å sikre at leddene kan produseres og oppfylle driftsbetingelsene. Imidlertid har hvert trinn forskjellige mål.
La oss karakterisere hvert av stadiene separat.
Strukturell syntese er prosessen med å designe en ny eller modernisere (forbedre) en eksisterende struktur av en mekanisme som har de nødvendige egenskapene: et gitt antall bevegelser, fravær av lokale bevegelser og redundante forbindelser, et minimum av lenker, bruk av kinematiske par av en bestemt type.
På stadiet av strukturell syntese dannes et strukturelt diagram av mekanismen, som bestemmer antall lenker, antall, type og mobilitet til kinematiske par, samt antall redundante forbindelser og lokal mobilitet. Innføringen av mekanismen til hver redundant forbindelse og lokal mobilitet i strukturdiagrammet må beviselig begrunnes. Hovedbetingelsene ved valg av et strukturelt diagram er de spesifiserte parametrene: nødvendig antall bevegelser, fravær av lokale bevegelser og redundante forbindelser, minimering av antall lenker, bruk av kinematiske par av en bestemt type eller klasse. Samtidig er de avgjørende betingelsene: den gitte bevegelsesloven og plasseringen av aksene til inngangs- og utgangslenkene. Hvis aksene til inngangs- og utgangslenkene til mekanismen er parallelle, velges et flatt blokkdiagram. Når aksene til inngangs- og utgangslenkene krysser eller krysser, bruk
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.3. Syntese av spakmekanismer
bruker et romlig skjema. I de fleste tilfeller kommer oppgaven med strukturell syntese ned til å velge et strukturelt diagram av en mekanisme fra et sett med standarddiagrammer.
Den strukturelle syntesen av flate spakmekanismer utføres i samsvar med den strukturelle klassifiseringen av L.V. Assur (se fig. 2.3). Som et eksempel kan du vurdere den strukturelle syntesen av en sveiv-skyvemekanisme (fig. 2.6).
Ris. 2.6. Opplegg for strukturell syntese av en sveiv-skyvemekanisme
Resultatet av den første oppgaven med strukturanalyse viser at mobiliteten til mekanismen er lik enhet, derfor velger vi som den primære mekanismen en gruppe lenker med den tilsvarende mobiliteten, hvis lenker danner et rotasjonskinematisk par av den femte klasse (Fig. 2.6, a). Til den valgte primærmekanismen fester vi en strukturell gruppe lenker av 2. klasse av 2. orden av 2. type (fig. 2.6, b). Mekanismen oppnådd på denne måten vil ha en rasjonell struktur, det vil si at dens strukturelle diagram ikke vil inneholde strukturelle defekter (fig. 2.6, c).
Mer komplekse strukturelle diagrammer kan oppnås ved å slå sammen det nødvendige antallet strukturelle grupper av passende klasse, type og rekkefølge. I dette tilfellet er det nødvendig å sikre at strukturen til mekanismen forblir rasjonell når alle andre spesifiserte betingelser er oppfylt.
Resultatet av det strukturelle syntesestadiet er et strukturelt diagram av mekanismen som tilfredsstiller de aksepterte kriteriene.
Metrisk syntese er prosessen med å bestemme de grunnleggende geometriske dimensjonene til mekanismekoblingene og konfigurasjonene av arbeidsflateprofilene som best tilfredsstiller de gitte forholdene og gir den optimale kombinasjonen av kvalitetsindikatorer.
Målene for metrisk syntese er:
1) syntese av det kinematiske diagrammet til mekanismen basert på de spesifiserte posisjonene til inngangs- eller utgangskoblingen;
2) syntese av det kinematiske diagrammet av mekanismen i henhold til spesifiserte geometriske parametere;
3) syntese av det kinematiske diagrammet til mekanismen i henhold til en gitt bevegelseslov for utgangslenken;
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.3. Syntese av spakmekanismer
4) syntese av det kinematiske diagrammet av mekanismen i henhold til de gitte kinematiske parameterne: gjennomsnittlig hastighet på utgangskoblingen, ujevnhetskoeffisient for gjennomsnittshastigheten;
5) syntese av kinematisk diagram av mekanismen basert på en gitt verdi av trykkvinkelen eller overføringsvinkelen.
Løsningen på problemene med metrisk syntese er det kinematiske diagrammet av mekanismen som tilfredsstiller kriteriene for begge syntesestadiene.
Kinematisk diagram- dette er en grafisk representasjon av mekanismen, laget i en viss skalafaktor ved å bruke symboler anbefalt av GOST.
Det kinematiske diagrammet inneholder informasjon om antall ledd og type bevegelser de utfører, antall mobilitet og klasse av kinematiske par, antall og type kinematiske kjeder og dimensjonene til leddene.
Når vi løser problemer med metrisk syntese av spakmekanismer, veiledes vi av følgende kriterier:
1) betingelse for rotasjon av leddene - den utformede mekanismen må gi mulighet for at inngangs- eller utgangslenkene kan rotere
porter i en vinkel på mer enn 360°;
2) designbegrensninger på dimensjonene til mekanismen - den utformede mekanismen må ha generelle dimensjoner som passer innenfor de angitte områdene;
3) nøyaktighet for å sikre den spesifiserte bevegelsesloven eller spesifiserte posisjoner av koblingene til mekanismen - den utformede mekanismen må sikre oppfyllelsen av den spesifiserte bevegelsesloven eller spesifiserte posisjoner av koblingene med den nødvendige nøyaktigheten;
4) begrensning på betingelsene for overføring av kraftfaktorer - gjeldende verdi av trykkvinkelen til den utformede mekanismen bør ikke overstige den tillatte verdien;
5) andre forhold og krav som tar hensyn til spesifikke funksjoner og drift av mekanismen.
TIL metoder for syntese av mekanismer inkluderer syntese ved hjelp av analysemetoder
Og metoder for direkte syntese (analytisk, grafisk og grafisk-analytisk).
Metrisk syntese av mekanismer ved bruk av grafisk-analytiske metoder utføres i en viss skalafaktor.
Skaleringsfaktor- dette er et forhold til enhver ekte-
en gitt verdi l, tatt i meter, til lengden av segmentet l, målt i millimeter og viser denne verdien som en del av kinematisk diagram.
Lengdeskalaen er forholdet mellom lengden på et segment som viser en verdi i millimeter og den faktiske verdien i meter.
Skalaen er en standardisert mengde, hvis verdier er strengt regulert av bestemmelsene i GOST. Fra bestemmelsene i disiplinen "Engineering Graphics" er det kjent at den faktiske skalaen er
Teori om mekanismer og maskiner. Lærebok godtgjørelse |

2. SPAKKEGIR
2.3. Syntese av spakmekanismer
iført 1×1, og det er serier med forstørrelsesskalaer og reduksjonsskalaer. Skalafaktoren er den gjensidige av skalaen og er ikke en standardisert verdi. Verdiene til skalafaktoren tas vilkårlig avhengig av de spesifiserte betingelsene og målene for å løse de nødvendige problemene.
μl =OA l OA,
hvor l OA er den faktiske lengden på sveiven;
2.4. KVALITETSINDIKATORER PÅ SPAKKMEKANISMER
Begrensningene og betingelsene for metrisk syntese danner verdiene til kvalitetsindikatorer ved hjelp av hvilke kvaliteten på spakmekanismer vurderes.
Kvalitative indikatorer på spakmekanismer er: effektivitet η;
mekanisme slag H;
koeffisient av ujevnhet av gjennomsnittlig hastighet k; trykkvinkelϑ; overføringsvinkelμ.
Effektivitetη er en dimensjonsløs størrelse, ha-
karakteriserer mengden total energi som er nyttig brukt av mekanismen. Som nevnt i § 1.4, er effektiviteten til mekanismen alltid mindre enn én, siden prosessen med bevegelsestransformasjon er ledsaget av tap av mekanisk energi forårsaket av tilstedeværelsen av friksjon i kinematiske par. Jo nærmere effektivitetsverdien er enhet, jo lavere tap er derfor, jo høyere er kvaliteten på spakmekanismen.
Arbeidsområdet til flate spakmekanismer vurderes vanligvis av bevegelsesområdet til utgangslenken, kalt mekanismens slag.
Mekanismens slag er avstanden mellom start- og sluttposisjonen til utgangslenken.
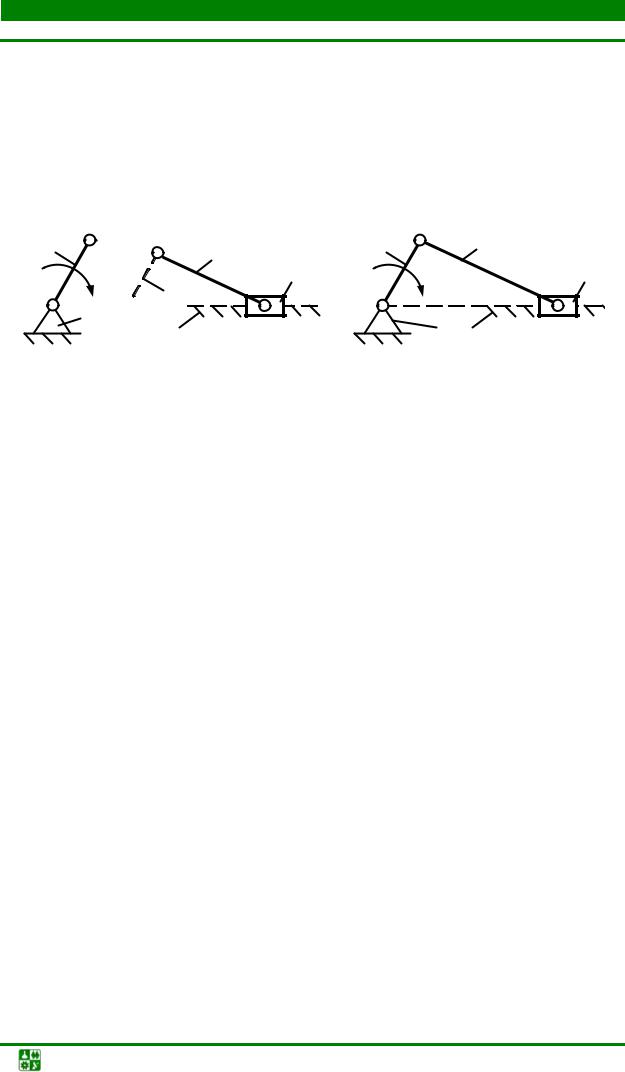
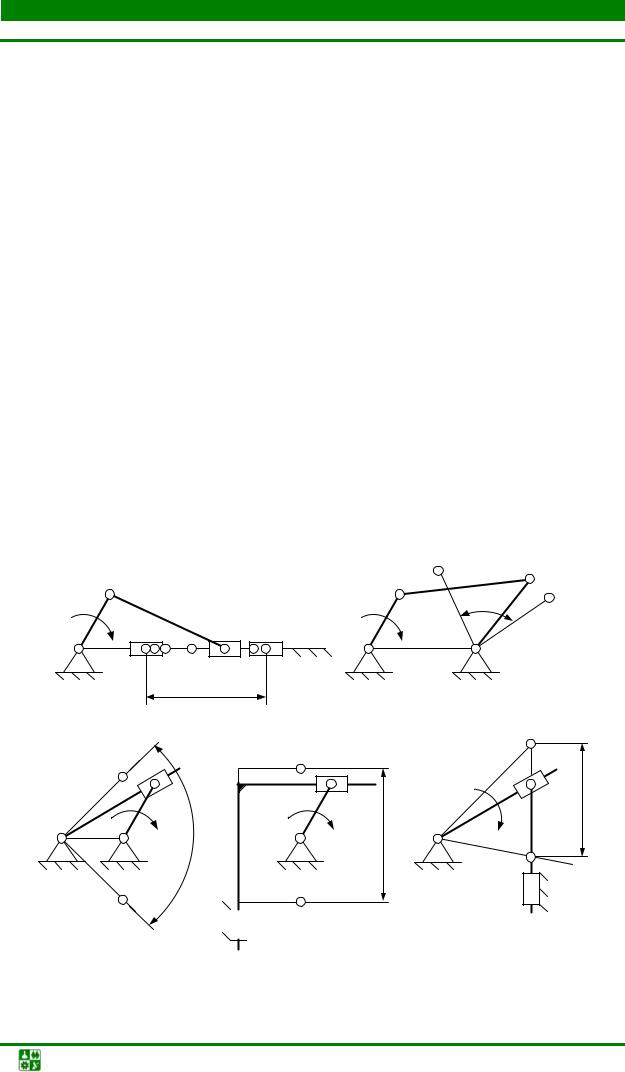
For sveiv-glidemekanismer (fig. 2.7, a), sinus (fig. 2.7, d) og tangentielle (fig. 2.7, d) mekanismer, beregnes slaget i henhold til definisjonen av denne parameteren, og for hengslet (fig. 2.7) , b) og vippemekanismer ( Fig. 2.7, c) kan verdien av denne parameteren finnes ved uttrykket
Н = ψ l,
Teori om mekanismer og maskiner. Lærebok godtgjørelse |
2. SPAKKEGIR
2.4.
hvor l ,ψ – lengde og vinkel, rad, av utgangslenkespennet.
Vippearmsvingevinkel eller vippe ψ er vinkelen mellom start- og sluttposisjonen til vippearmen eller vippen (fig. 2.7, b, c).
De fleste flate spakmekanismer har en periodisk drift, det vil si etter en viss tidsperiode, gjentas alle prosesser som forekommer i mekanismen. I dette tilfellet er driftssyklusen til enhver mekanisme delt inn i arbeids- og tomgangsfaser. Under kraftslagfasen utføres serviceformålet med mekanismen, og tomgangsfasen er ment å fullføre bevegelsessyklusen og avlaste gjenværende spenninger fra arbeidsflatene til leddene. Forholdet mellom tiden brukt på arbeids- og tomgangsslag vurderes vanligvis ved å bruke gjennomsnittlig hastighetsujevnhetskoeffisient.
Gjennomsnittlig hastighetsujevnhetskoeffisient er koeffisienten
som karakteriserer forholdet mellom tomgangstiden T x.x og arbeidsslagtiden T r.x:
T x.x | |||||
hvor θ er vinkelen mellom koblingsstangens posisjoner i mekanismens ytterposisjoner.
A, B | A, B | A, B |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
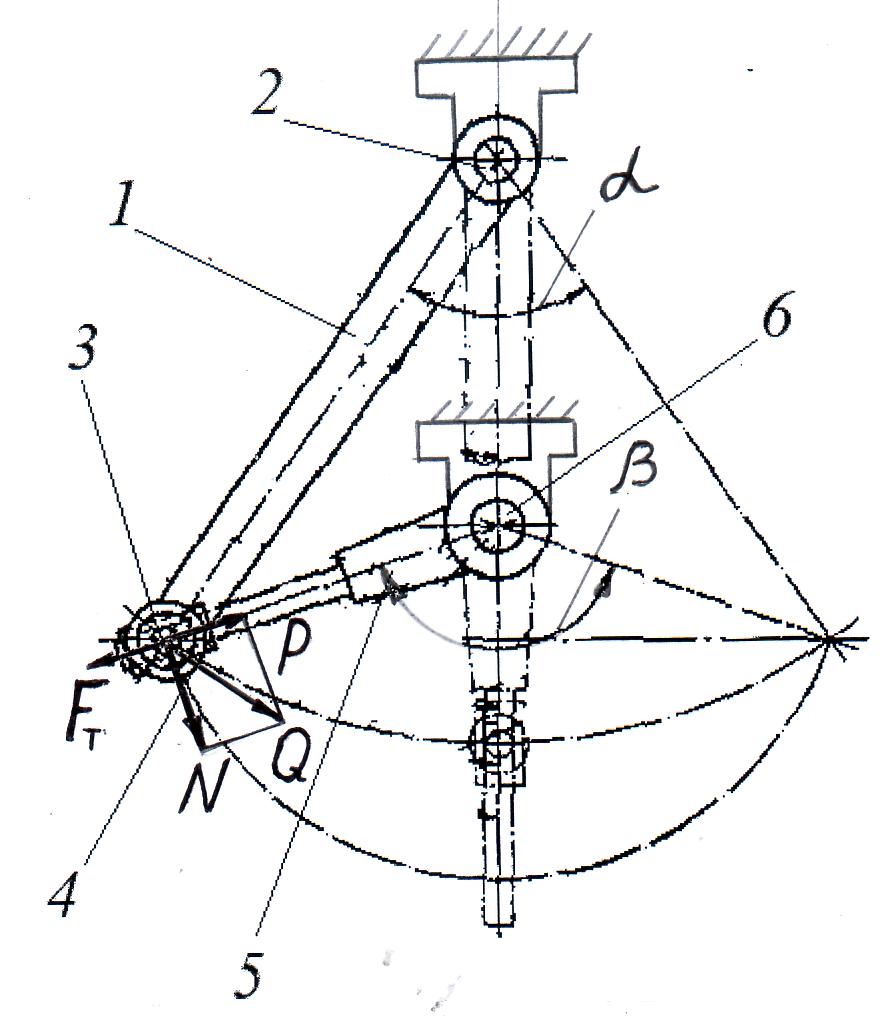
Ris. 2.8. Opplegg for å bestemme trykkvinkler for typiske spakmekanismer For å vurdere kvaliteten på overføring av kraftfaktorer mellom leddene til flate spakmekanismer, brukes trykkvinkelen ϑ. Trykkvinkelen er den spisse vinkelen mellom den aktive kraftvektoren Pa, som virker fra siden av det foregående leddet, og hastighetsvektoren til punktet for påføringen (fig. 2.8). Verdien av trykkvinkelen danner betingelsene for overføring av krefter mellom leddene, og bestemmer størrelsen på drivkraften til mekanismen Q: Q = P a cos(ϑ) . Fra analysen av uttrykket følger det at en reduksjon i verdien av trykkvinkelen fører til en økning i verdien av drivkraften, og en økning i trykkvinkelen reduserer følgelig denne kraften. Under betjening av spakmekanismer er trykkvinkelen alltid ϑ ≤ 90°. Når trykkvinkelen ϑ > 90° kan det oppstå blokkering eller selvbremsing i mekanismene. Selvbremsing, eller jamming, er en tilstand av en mekanisme som ledsaget av verdier for trykkvinkler som gjør det umulig for leddene å bevege seg med en hvilken som helst vilkårlig stor verdi av drivkraften. For å eliminere slike situasjoner, ved syntetisering av mekanismer, spesifiseres tillatte verdier for trykkvinkler [ϑ], styrt av følgende anbefalinger: for mekanismer hvis lenker kun danner rotasjonskinematiske par, ligger den tillatte trykkvinkelen i området
2. SPAKKEGIR 2.4. Kvalitative indikatorer på spakmekanismer [ϑ ] = 45−60°, og for mekanismer som har en kombinasjon av rotasjons- og translasjonskinematiske par, [ϑ] = 30−45°. Ved trykkvinkelverdier [ϑ] = 90° er mekanismen i såkalte "døde" posisjoner, noe som i statikk fører til blokkering av leddene i bevegelse (dynamikk), mekanismen overvinner slike posisjoner ekstra volum kinetisk energi. For å vurdere kvaliteten på hengselmekanismen brukes i tillegg til trykkvinkelen overføringsvinkelen μ (fig. 2.8, b). Overføringsvinkelen er vinkelen som bestemmer den relative posisjonen til aksene til koblingsstangen og vippearmen til hengselmekanismen. Verdiene for overføringsvinkler og trykk henger sammen: ϑ+μ =90°. Analyse av uttrykket viser at en økning i trykkvinkelen fører til en reduksjon i overføringsvinkelen, og omvendt fører en økning i verdiene til overføringsvinkelen til en reduksjon i trykkvinkelen. En samtidig økning eller reduksjon i verdiene av trykk og overføringsvinkler er umulig. Når en av vinklene er lik null, når verdien av den andre vinkelen et maksimum, dvs. 90° ..
|
Ledende en lenke er en kobling som arbeidet til eksterne krefter på den er positivt for, slave– negativ eller lik null.
I fig. Figur 13.2 viser en fireleddet mekanisme. Til inngangslenken 1 et drivmoment påføres denne mekanismen M d , til utgangskoblingen 3 - motstandsmoment M c3. På designstadiet vil massene og treghetsmomentene til lenkene i fig. 13.2 er definert, derfor er drivkraften som virker på det drevne leddet reaksjonen F 32 rettet langs linjen Sol , hastigheten på applikasjonspunktet på lenken 3 - V C sendt til side 3 vinkelrett på lenken 3 . Hjørne 32 mellom vektorer F 32 og V C - trykkvinkel i rotasjonsparet MED . Når denne vinkelen øker, vil den tangentielle komponenten av kraften F t 32 , fremme koblingsrotasjon 3 i retningen 3 , minker og normal F n 32 , som ikke påvirker bevegelsen, men bare deformerer (komprimerer) koblingen 3 , øker. Det vil si at med en økning i trykkvinkelen forverres betingelsene for overføring av krefter i girkassen. Siden det i ekte girkasser alltid er friksjon, er selvbremsing eller blokkering mulig ved en viss verdi av trykkvinkelen i girkassen.
Selvlåsende eller blokkerende- dette er en tilstand av mekanismen når, som følge av økende trykkvinkler i en av girkassene, bevegelse av mekanismen blir umulig med en vilkårlig stor verdi av drivkraften. Ofte, for å karakterisere forholdene for kraftoverføring, brukes kraftøkningskoeffisienten (uten å ta hensyn til friksjon)
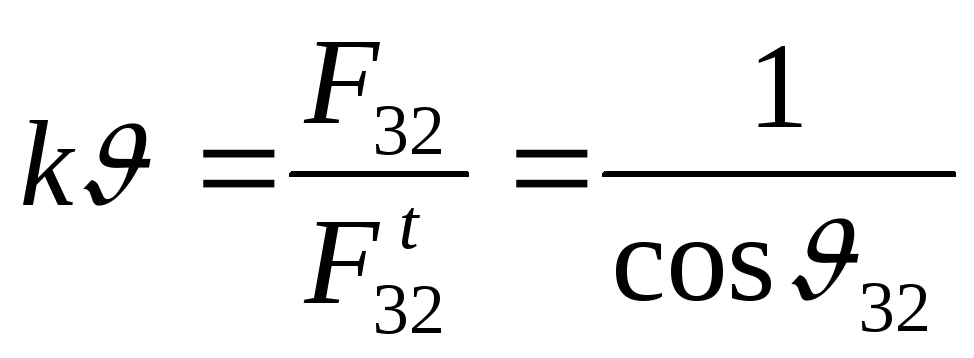
|
|

Siden det i virkelige mekanismer alltid er friksjon, oppstår jamming ved trykkvinkler < 90 . Ved beregning spesifiseres kraftøkningskoeffisienten (for eksempel k = 2 ) og bestemme tillatt trykkvinkel [ ] . For foreløpige beregninger er det bare akseptert for mekanismer med rotasjonspar [ ] = 45 - 60 , i nærvær av progressive kontrollpunkter [ ] = 30 - 45 . Det skal bemerkes at i de såkalte "døde" posisjonene til mekanismen, er trykkvinklene = 90 . Under statiske forhold kan mekanismen blokkere i denne posisjonen i dynamikk, mekanismen beveger seg gjennom disse posisjonene ved å bruke den kinetiske energien som er lagret av de bevegelige delene.
Konseptet med koeffisienten for ujevnhet av gjennomsnittlig hastighet
Ujevnhetskoeffisienten til gjennomsnittshastigheten til utgangslenken k er forholdet mellom gjennomsnittshastighetene til utgangsleddet under dets bevegelse på returslaget 3wd åh og rett frem 3wd
|
|
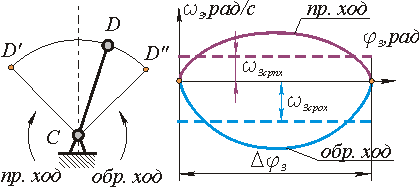
Hvor 

t Åh og T ph - reverseringstid og fremtid, henholdsvis.
Ved utforming av teknologiske maskiner der belastningen på utgangsleddet til mekanismen i arbeids- eller foroverslaget er mye større enn belastningen i tomgangs- eller reversslaget, er det ønskelig at hastigheten på utgangsleddet i foroverslaget er mindre enn i den motsatte. For å redusere tomgangstiden er det også nødvendig å øke hastigheten under revers. Derfor, når man syntetiserer en mekanisme metrisk, er det ofte nødvendig å velge koblingsstørrelser som gir en gitt koeffisient for gjennomsnittlig hastighetsujevnhet.
ALYUSHIN Yu.A.
STRUKTURELL ANALYSE AV SELE- OG SPAKKMEKANISMER
(Grunnleggende konsepter og eksempel på selvstendig arbeid)
Studiet av hengslede spakmekanismer involverer strukturelle, kinematiske og dynamiske analyser. Strukturell analyse inkluderer å bestemme antall bevegelige lenker og kinematiske par (KP), deres klassifisering, å bestemme antall frihetsgrader for et plan og romlig mekanisme, eliminere redundante forbindelser (for romlige grupper) og "rasjonalisere" strukturen i henhold til Assur med en energitolkning av mulige varianter av kretsløp med redundant mobilitet. Strukturen til en mekanisme bestemmes av funksjonelt relaterte sett med elementer (lenker, grupper av lenker eller standardmekanismer) og forholdet mellom dem (bevegelige girkasser eller faste ledd). Strukturen til mekanismen på nivå med lenker, girkasser og strukturelle grupper vises på dets strukturelle diagram, som er forskjellig fra den kinematiske med tilleggsinformasjon om typen kinematiske par som forbinder disse elementene.
1. Grunnleggende begreper for strukturanalyse.
1.1. Mobilitet (antall frihetsgrader) til mekanismen - antall ledende lenker (uavhengige generaliserte koordinater) som unikt bestemmer posisjonen til alle andre lenker av mekanismen (på et plan eller i rommet). 1.2. Lokal mobilitet – mobiliteten til individuelle ledd i mekanismen, som ikke påvirker det nødvendige antallet drivlenker, men tillater mulige forskyvninger av leddene til andre formål, for eksempel tillater rotasjonen av en rulle som er dreibart koblet til skyveren i kammekanismen utskifting av glidfriksjon med rullefriksjon på overflaten av kammen.1.3. Forbindelse - begrensning pålagt bevegelse av en kropp (mekanismekobling).
1.4. Assur strukturelle grupper. Enhver mekanisme kan representeres som en kombinasjon av en eller flere to-leddet (primær) mekanismer og en eller flere Assur-grupper. Assur strukturelle grupper er kinematiske kjeder dannet kun av bevegelige ledd av en mekanisme, hvis mobilitet (på planet) er null. Strukturformel for Assur-gruppenHerfra
![]() ,
,
Hvor  antall lenker;
antall lenker;  – antall lavere CP-er i strukturgruppen. Siden alle tall må være heltall, må antallet lenker i en strukturell gruppe alltid være partall, og antallet lavere CP-er må være et multiplum av 3. 1.4.1. Assur Group
– flate kinematiske kjeder med null mobilitet. 1.4.2.
Klasse
Assur strukturell gruppe er antallet kinematiske par som er inkludert i en lukket sløyfe dannet innvendig
kinematiske par av gruppen. 1.4.3.
Rekkefølge
Assur-gruppen bestemmer antall kinematiske par som den er festet til stativet, initialmekanismen eller andre grupper. 1.4.4.
Leiebånd
Assur strukturelle grupper kalles analoger av mekanismeelementene som denne gruppen er knyttet til. De vises vanligvis som stiplede linjer som strekker seg fra frie CP-er (se fig. 1). Gitt dette konseptet rekkefølge gruppe bestemmer antallet bånd, som den er festet til stativet, startmekanismen eller andre Assur-grupper med.
– antall lavere CP-er i strukturgruppen. Siden alle tall må være heltall, må antallet lenker i en strukturell gruppe alltid være partall, og antallet lavere CP-er må være et multiplum av 3. 1.4.1. Assur Group
– flate kinematiske kjeder med null mobilitet. 1.4.2.
Klasse
Assur strukturell gruppe er antallet kinematiske par som er inkludert i en lukket sløyfe dannet innvendig
kinematiske par av gruppen. 1.4.3.
Rekkefølge
Assur-gruppen bestemmer antall kinematiske par som den er festet til stativet, initialmekanismen eller andre grupper. 1.4.4.
Leiebånd
Assur strukturelle grupper kalles analoger av mekanismeelementene som denne gruppen er knyttet til. De vises vanligvis som stiplede linjer som strekker seg fra frie CP-er (se fig. 1). Gitt dette konseptet rekkefølge gruppe bestemmer antallet bånd, som den er festet til stativet, startmekanismen eller andre Assur-grupper med. 
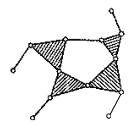
Ris. 1. Assur dobbeltledergrupper.
Tabell 1 viser eksempler på Assur strukturelle grupper II-VI klasser. Frie kinematiske par er merket med utgående avledninger - stiplede linjer, som i fig. 1.
Tabell 1.
| Gruppe | Rekkefølge |
|||
| II klasse | ||||
| III klasse |
|
|||
| IV klasse | ||||
| V klasse |
|
| ||
| VI klasse |
|
| ||



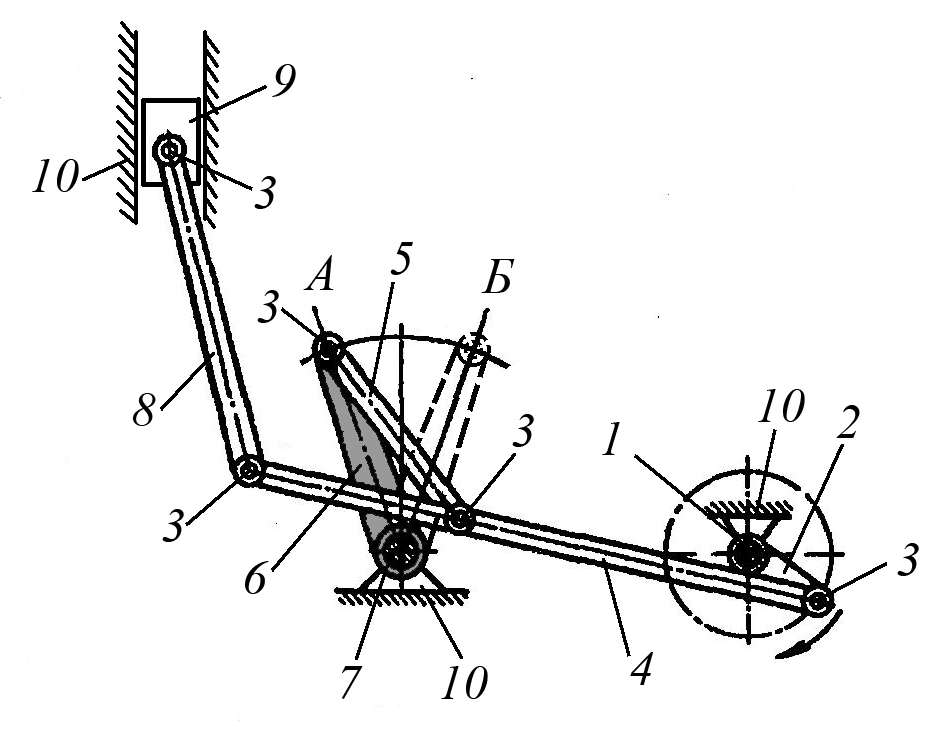
2. Et eksempel på å utføre en strukturell analyse av en mekanisme med seks ledd, det kinematiske diagrammet er vist i fig. 2.
Ris. 2. Kinematisk diagram av mekanismen
2.1. Velge den faste lenken– stativ "0", hvor de faste aksene til hengslene A og D er festet, samt glideføringene. 2.2. Vi nummererer(arabiske tall) og klassifisere de bevegelige delene. For å gjøre det lettere for påfølgende dynamisk analyse, er det tilrådelig å nummerere koblingene sekvensielt fra energikilden (ledende kobling) til de fjerneste forbrukerne. I mekanismen under vurdering er det fem bevegelige ledd: lenke 1 - sveiven, gjør en rotasjonsbevegelse med en full rotasjon på 360 0; 2 og 4 - koblingsstenger, utfør planparallell bevegelse med rotasjon i forhold til de bevegelige aksene (posisjonen til MCS endres over tid); lenke 3 – vippearm, utfører oscillerende bevegelse i forhold til den faste aksen D; lenke 5 – glidebryter, utfører frem- og tilbakegående bevegelse langs faste føringer. 2.3. Vi klassifiserer kinematiske par(KP), som bestemmer den relative bevegelsen til tilstøtende lenker. I noen lærebøker er kinematiske par nummerert med romertall, for eksempel I, II, III, IV, V, VI og VII i figurene 2, 3 og 5. Men med lavere sannsynlighet for feil er det mer praktisk å presentere klassifiseringen av KP i form av tabell 2, der i stedet for romertall Tallene bruker store latinske bokstaver med indekser som indikerer tilstøtende lenker forbundet med tilsvarende kinematiske par.Tabell 2.
| Antall tilstøtende lenker | Digital KP-kode | Type kontrollpanel | Betegnelse i fig. 2, a, 2, b og i teksten |
|
| 2&4 (eller 3&4) | C 24 (eller C 34) |
|||
Hvor n- antall bevegelige deler ( n = 5), s 1
- antall lavere kinematiske par med samme mobilitet ( s 1
=7
). Det er ingen høyere (med to mobiliteter på planet) kinematiske par i mekanismen, s 2
=0
. Det totale antallet frihetsgrader for mekanismen er 1, det vil si at for driften av mekanismen er ett drivledd tilstrekkelig, som kan brukes som en AB-sveiv. 2.5. Vi identifiserer Assur strukturelle grupper. For å identifisere Assur-strukturgruppene (med antall frihetsgrader W = 0), deler vi mekanismen inn i de enkleste modulene, med utgangspunkt i den som er lengst fra den ledende lenken. Før dette er det tilrådelig å vise par kombinert på kinematiske diagrammer (se fig. 2) på ett punkt, spesielt mellom lenker 2, 3 og 4, separat, for eksempel, som vist i fig. 3, a eller i fig. 3, b. Disse to skjemaene tilsvarer generelt forskjellige mekanismer, som er forskjellige både i kinematikken til leddene 4 og 5 (hvis aksene til hengslene som forbinder leddene 2, 3 og 4 ikke er på linje i rommet), og i kreftene som overføres gjennom kinematisk par mellom ledd 2 og 3. Hvis vi kombinerer aksene til de rotasjonskinematiske parene som forbinder de indikerte leddene, vil de kinematiske forholdene bli entydig bestemt, men de overførte kreftene kan endres på grunn av utseendet til passive krefter som ikke deltar i overføring av kraft mellom tilkoblede tilstøtende lenker på grunn av det faktum at de i hvert øyeblikk i tid er rettet ortogonalt til bevegelseshastigheten til disse aksene (skalarproduktet av ortogonale vektorer er 0!). 

Ris. 3. Mulige kinematiske skjemaer for mekanismen.
Kinematiske diagrammer i fig. 3 med bildet av koblingsstang 2 eller vippearm 3 i form av stive trekanter kan føre til en feil ved klassifisering av mekanismen hvis den er klassifisert som klasse 3 (i henhold til antall sider av den mest komplekse lukkede konturen) og rekkefølge 3 (i henhold til antall ledninger som forbinder gruppen med ledende ledd (initialmekanisme) og stativet. For å unngå feil, er det nødvendig å skille mekanismen i protozoer moduler, hvis frakobling ikke forstyrrer driften av den gjenværende delen av mekanismen. Derfor må utvalget begynne med de to-ledede Assur-gruppene i klasse 1, vist i fig. 1. Den fjerneste Assur-gruppen dannes ved å koble stang 4 og glidebryter 5 med tre kinematiske par: C 24, E 45, 5&0 i fig. 3, a eller C 34, E 45, 5&0 i fig. 3, b, hvorav to kinematiske par tilhører typen «1c» og ett til typen «1p» (5&0). Ledningene på girkassen S 24 og 5&0 (fig. 3, a) eller S 34 og 5&0 (fig. 3, b) forbinder denne Assur-strukturgruppen (type GDP) med koblingsstang 2 (vippearm 3 i fig. 3, b) og staget 0. Antall frihetsgrader (mobilitetsgrad) for den gjenværende delen (lenker 1, 2 og 3) forblir likt W= 1, som i den originale mekanismen. Dette bekrefter at den første strukturelle gruppen er korrekt identifisert. Deretter skiller vi den andre gruppen (lenker 2 og 3) med tre kinematiske par av typen "1v" (B 12, C 23, D 03, Assur strukturell gruppe av type VBB). Graden av mobilitet til den gjenværende delen etter dette - den første mekanismen med det kinematiske paret A 01 - forblir lik W = 1. I fig. Figur 4 viser Assur-gruppene separat. Stiplede piler for hver gruppe i fig. Figur 4 viser "ledningene" som gruppene er festet med til resten av mekanismen, som inneholder drivleddet 1 ("initialmekanismen") og stativet 0. Dessuten antas en slik forbindelse gjennom introduksjonen av et kinematisk par som tilhører den vedlagte Assur-gruppen inn i kroppen til stativet eller donormekanismen, hvorfra den vil motta energi til å bevege seg og utføre en teknologisk operasjon.
![]()
![]()
Ris. 4. Strukturelle grupper av Assur. I følge Artobolevsky I.I. klassen til en gruppe bestemmes av antall kinematiske par som danner den mest komplekse lukkede konturen av gruppen. Rekkefølgen av gruppen bestemmes av antall frie elementer av kinematiske par som gruppen kan festes til den første mekanismen og stativet. Begge separerbare strukturelle grupper tilhører 2. orden og 1 klasse, hele mekanismen tilhører samme klasse. 2.6. Eliminer redundante tilkoblinger. Siden antakelsen om planparallell bevegelse av lenkene er relatert til en ideell mekanisme, og i virkeligheten, på grunn av unøyaktigheten i produksjonen av elementer, primært ikke-ortogonaliteten til aksene til bevegelsesplanet til lenkene og ikke -parallelisme av aksene til rotasjonskinematiske par, mekanismen konverteres til en romlig, antall frihetsgrader for en reell mekanisme skal beregnes i henhold til Malyshev-formelen. Tar vi hensyn til de kinematiske parene fra Tabell 2, får vi: Mekanismen har 6 redundante forbindelser, som kan elimineres ved å erstatte de lavere kinematiske parene med høyere. For det mer foretrukne opplegget i fig. 1 fra synspunktet til energistrømmer. 3, og ett av alternativene for å eliminere redundante tilkoblinger er vist i tabell 3 og fig. 5.
Tabell 3.
| Antall tilstøtende lenker | Type girkasse for PPD | Type kontrollpanel for romlig bevegelse | Betegnelse i fig. 2a og 2b |
|
er i stand til å forstå betydningen av kultur som en form for menneskelig eksistens og bli veiledet i sin virksomhet av moderne toleranseprinsipper,
Produktbeskrivelse
Spakmekanismer. Del 1
Spakmekanismer inkluderer mekanismer som består av ledd som utfører rotasjons-, translasjons- eller planparallell bevegelse. Disse mekanismene utmerker seg ved sin enkelhet, høye effektivitet og høye belastningskapasitet, men de kan ikke gi noen bevegelseslov for det drevne leddet, noe som til en viss grad begrenser deres bruk i teknologi.
Følgende typer spakmekanismer er mye brukt i teknologisk utstyr: firestangs hengselmekanismer, sveivmekanismer, vippemekanismer. La oss se på eksempler og designfunksjoner til spakmekanismer.
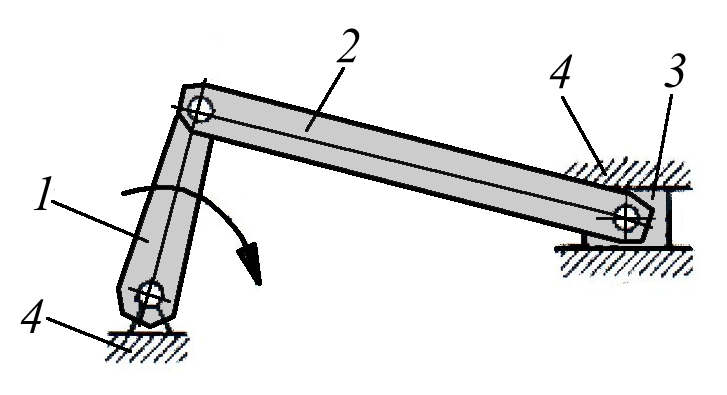
Fire-stangs leddede mekanismer
De hengslede firestangsmekanismene er på sin side delt inn i tre typer: dobbelsveiv, der det drivende og drevne leddet kan gjøre en full omdreining (se fig. 1a), sveivvippe, der drivleddet, sveiv, roterer, og den drevne vippebevegelsen gjør en vippebevegelse (se . Fig. 1b) og to vippearmer, der både de drivende og drevne leddene utfører en vippebevegelse (se Fig. 1c).
Et eksempel på en to-veiv mekanisme er mekanismen for å overføre et langt stykke vinkelstål fra et stativ til en rullebane av teknologisk utstyr, hvis designdiagram er vist i fig. 2. Den består av to fire-stråle kjedehjul 1 og 2, montert på aksler 3 og hengslet forbundet med hverandre ved hjelp av akser 5 med fire vugger 4, inn i hvilke arbeidsstykket 6 er plassert ved overføring, og danner således fire to-veiv. mekanismer. I dette tilfellet er akslene 3 på glidelagrene plassert i husene 7 og 8, som er montert på en felles ramme 10 ved hjelp av braketter 9.

En annen representant for firestangs leddmekanismer er dobbeltvippemekanismer (se fig. 3), som som regel brukes til å endre (øke, redusere) svingvinkelen til den drevne vippearmen eller endre kraften som skapes på den .
I fig. 3 EN viser en dobbeltvippemekanisme, hvis utforming (lengdeforholdet og den relative posisjonen til vippearmene 1 og 3) lar deg øke svingvinkelen β α ledende vippearm 1. I fig. 3 b en dobbelvippemekanisme er vist, hvis utforming (lengdeforhold og relativ plassering av vippearmer 1 og 3) gjør det mulig å redusere svingvinkelen β drevet vippearm 3 i forhold til svingvinkelen α ledende vippearm 1. Hvis i mekanismen vist i fig. 3 EN, vil det ledende leddet være ledd 3 som roterer med en full omdreining, og i mekanismen vist i fig. 3 b, vil dens ledende ledd 1 gjøre en hel revolusjon, så vil disse dobbeltvippemekanismene bli til sveivvippemekanismer. Disse mekanismene brukes sjelden som kraftaktuatorer for maskiner og utstyr, siden de bare kan operere i en begrenset svingvinkel (60 - 90 grader) på grunn av den økende mengden tap under overføring av krefter fra drivleddet til det drevne leddet, med økende svingvinkler på sveivene. Slike mekanismer brukes vanligvis som hjelpemekanismer, som opererer ved lave hastigheter og belastninger. Denne typen mekanismer brukes ofte som aktuator i ulike typer tiltere.
 Ris. 4. En tilter for vipping av bordet til støpemaskinen.
Ris. 4. En tilter for vipping av bordet til støpemaskinen.
I fig. Figur 4 viser aktuatormekanismen til tilteren, laget i henhold til den leddede firestangskonstruksjonen, bestående av en drivende vippearm 6, stivt montert på drivakselen 3, som er montert på glidelagre 2 på rammen 1 og en drevet vippearmen 7 dreibart montert på rammen 1 ved hjelp av en akse 5 og et glidelager 4, i dette tilfellet er de motsatte ender av stengene 6 og 7, gjennom aksene 8 og 9, dreibart forbundet med koblingsstangen 10, på hvilke to stativer 8 med en tverrgående tverrbjelke 11 er stivt festet. Når drivakselen 3 roterer (driften til vippeaktuatoren er ikke vist) med klokken, dreier også den ledende vippearmen 6 i samme retning, og med den hele. mekanismen til firestangshengslet. Valget av svingakser og lengder på vippearmene 6 og 7 er vist i fig. 4, når den dreies, tillater plattformen 11 å snus i en vinkel, som spesielt brukes til å vippe bordet til støpemaskinen. 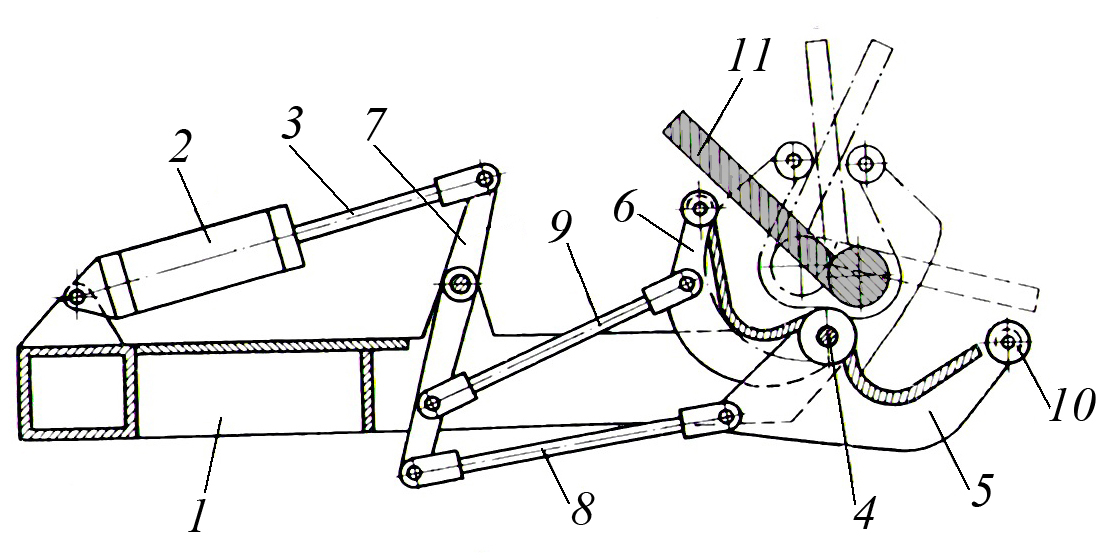
Ris. 5 Design av en sveiseposisjoner, hvis roterende kjever er drevne vippearmer av leddede firestaver
Figur 5 viser utformingen av sveiseposisjoner, roterende kjever
som er drevne vippearmer av leddede fireledd med en felles drevet vippearm. Den inneholder, montert på rammen 1, en drivpneumatisk sylinder 2, hvis stang 3 er ved hjelp av en dobbeltarmet spak 7, hvis drevne arm er den ledende vippearmen til to leddede fireledd som inneholder stenger 8 og 9, dreibart forbundet med de roterende kjevene 5 og 6 montert på en felles akse 4, som drives av vippearmene til disse fire leddene.
Tilteren fungerer som følger. Etter å ha fullført sveisingen av den første sømmen av produktet 11, gis en kommando om å slå på den pneumatiske sylinderen 2, hvis stang 3 er trukket tilbake og bringer de roterende kjevene 5 og 6 sammen, mens det sveisede produktet 11 installeres i en vertikal posisjon (på dette tidspunktet ruller støtterullene 10 langs hyllen til produktet). Som et resultat av dette beveger tyngdepunktet til det sveisede produktet 11 seg til motsatt side av støtteprismet (ikke vist i fig. 5) og med den påfølgende åpningen av spakene 5 og 6, som skjer når stangen 3 av den pneumatiske sylinderen 2 forlenges, plasseres produktet i en posisjon som er praktisk for sveising av den andre sømmen.
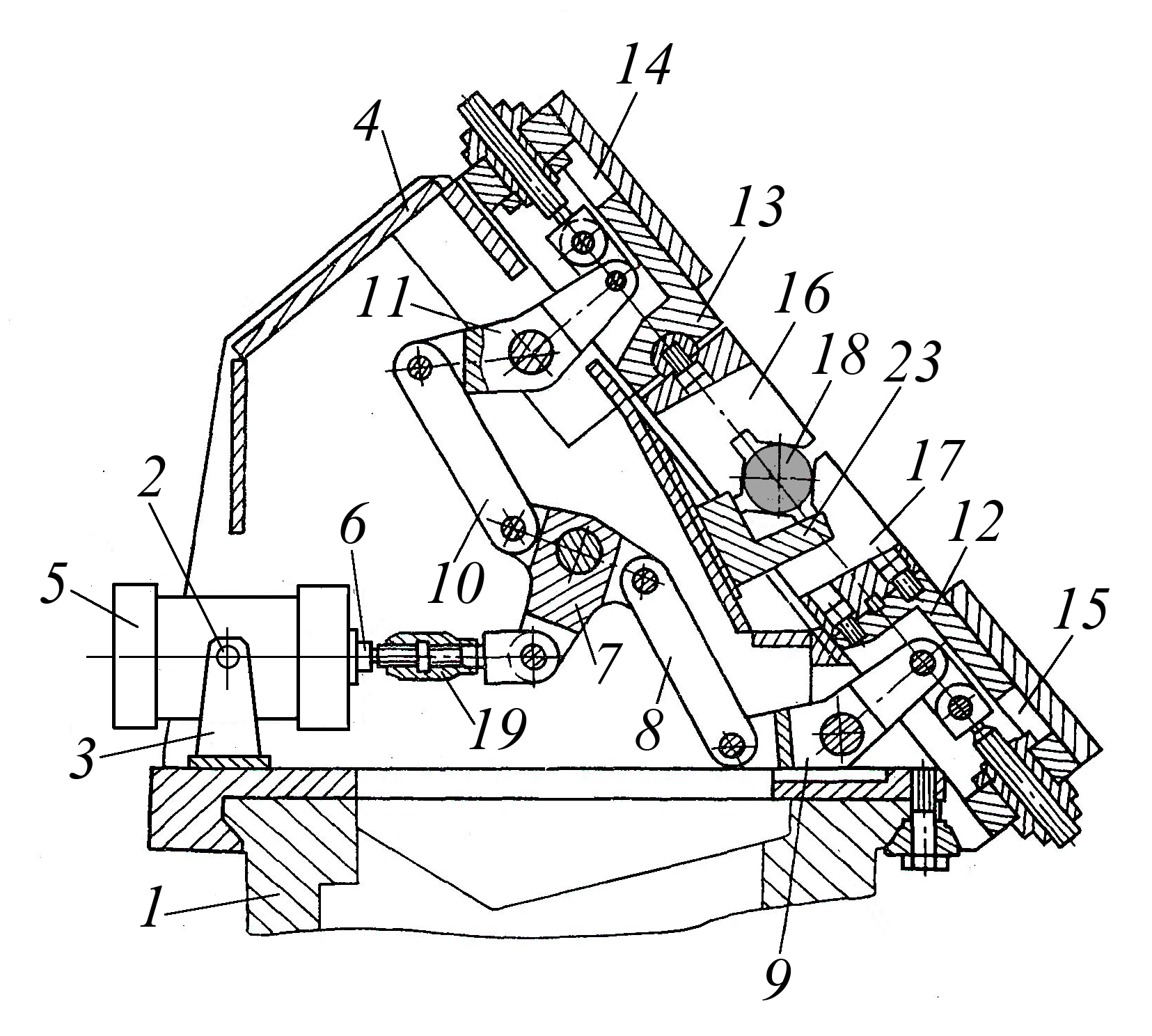
Fig. 6 Design av klemmemekanismen til en fresesentral maskin som inneholder to leddede firestaver.
Figur 6 viser utformingen av klemmemekanismen til en fresesentral maskin, som inneholder to leddede firestaver, hvis ledende ledd er en tre-arms spak, mens den fremste armen til sistnevnte er koblet til stangen til drivverket. pneumatisk sylinder, og de drevne vippearmene til firestavene er koblet til progressivt bevegelige klemprismer. Den inneholder et hus 4 montert på maskinens ramme 1, hvor en drivpneumatisk sylinder 5 med en stang 6 er hengslet montert ved hjelp av en akse 2 og en brakett 3, sistnevnte ved hjelp av en stang 19 og en tre-arm. spaken 7, mellomstengene 8 og 10 og toarmsspakene 9 og 11, er dreibart forbundet med gliderne 12 og 13, som er installert i føringene 14 og 15 til huset 4. På gliderne 12 og 13 er prismer 16 og 17 er festet, mellom hvilke baseholderen 23 er installert.
Klemmemekanismen fungerer som følger. For å klemme arbeidsstykket (akselen som skal trimmes og sentreres), forhåndsinstallert på basisvuggen 23, tilføres trykkluft til stanghulrommet til den pneumatiske sylinderen 5, mens stangen 6 trekker seg tilbake og dreier trearmsspaken 7 med klokken. , som gjennom mellomstenger 8 og 10, dobbeltarmede spaker 9 og 11 bringer gliderne 12 og 13 sammen med prismene 16 og 17 festet til dem, som klemmer arbeidsstykket 18. For å frigjøre det bearbeidede arbeidsstykket tilføres trykkluft til stempelhulrommet til den pneumatiske sylinderen 5, mens dens stang 6 strekker seg gjennom stangen 19 og spakmekanismen returnerer gliderne 12 og 13 med prismer 16 og 17 til deres opprinnelige posisjon, mens den frigjør det behandlede arbeidsstykket.
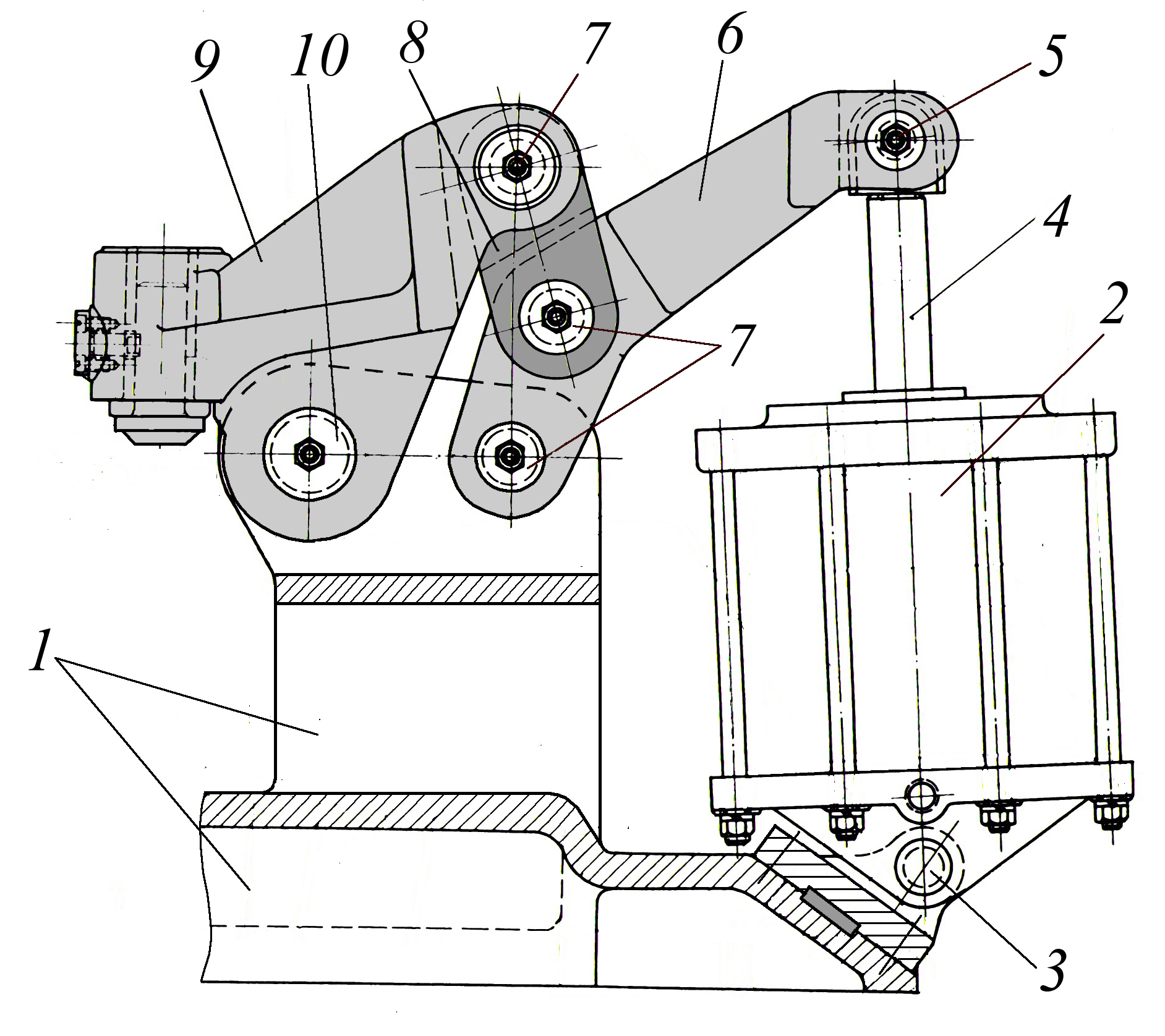
Fig. 7 Utforming av aktuatoren til bordpressen.
Figur 7 viser utformingen av en bordpresse med en pneumomekanisk drift, hvis aktuator er en dobbeltvippemekanisme. Den inneholder en kraftpneumatisk sylinder 2 hengslet montert på rammen 1 via en akse 3, hvis stang 4 også er dreibart forbundet via en akse 5 til en vippearm 6, og denne er dreibart forbundet med en stang 8 ved hjelp av aksene 7 , som igjen er forbundet via en akse 7 til en dobbeltarmet spak 9, montert ved hjelp av en akse 10 på rammen 1. Denne utformingen av aktuatoren drevet av en pneumatisk sylinder gjør det mulig å lage en bordpresse i liten størrelse. i stand til å utvikle betydelige krefter.
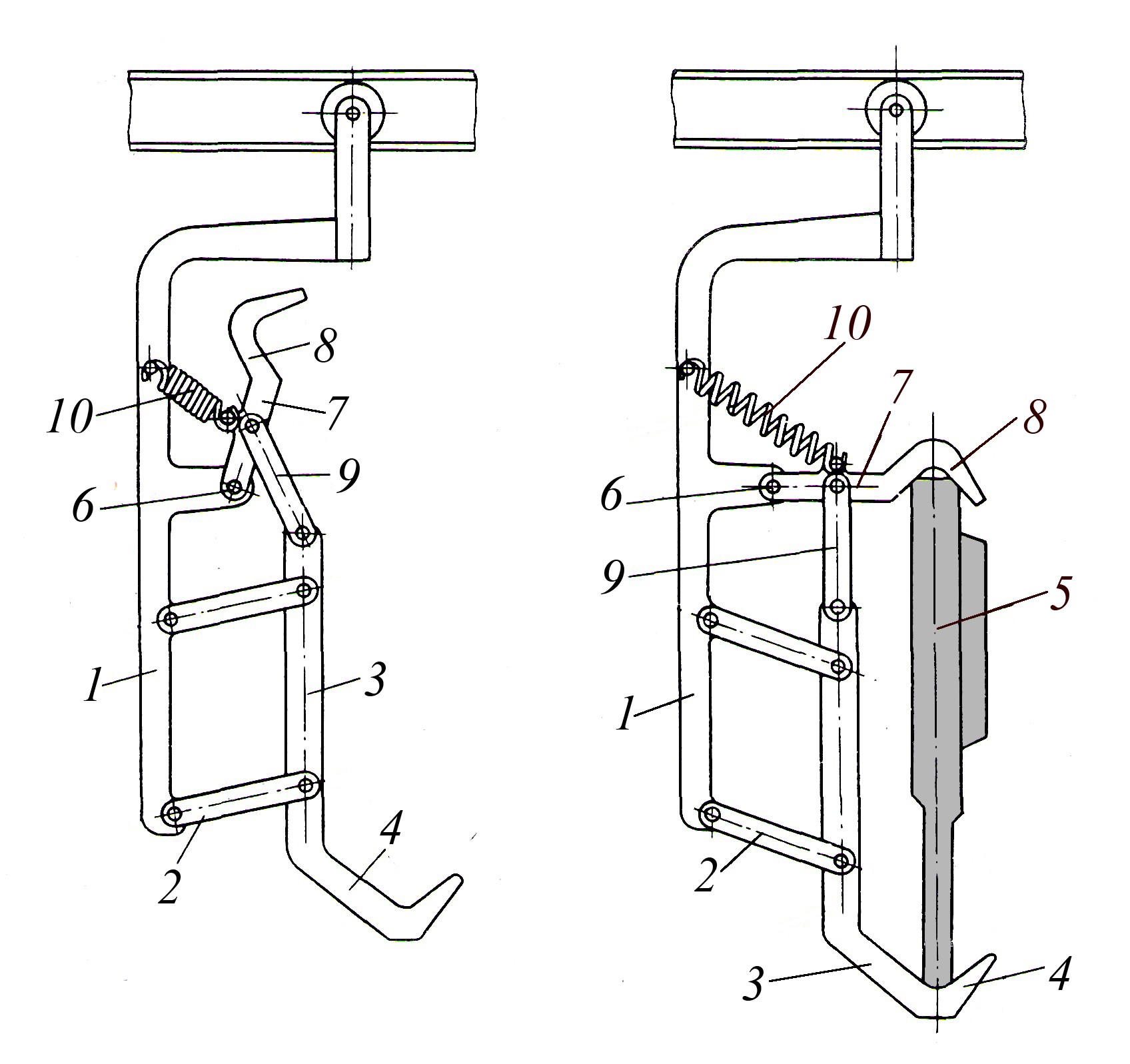
Ris. 8. Design av transportørens lastoppheng laget på grunnlag
leddet firestav
I fig. Figur 8 viser utformingen av transportørens lastoppheng, hvis aktuator inneholder et firestangshengsel. Denne utformingen sikrer enkel og pålitelig fiksering og fastspenning av den transporterte delen, samt installasjon og lossing. Den inneholder et fast stativ 1, montert på transportørvognen og forbundet med denne ved hjelp av to like lange vippearmer 2, en stang 3 med en bærehylle 4, for montering av den transporterte delen 5, samt en spak 7 med en trykkhylle 8, dreibart forbundet med det faste stativet 1 ved hjelp av en akse 6, og ved hjelp av en stang 9 er det dreibart forbundet med stangen 3. I dette tilfellet er en forlengelsesfjær 10 installert mellom den faste stolpen 1 og spaken 7.
Suspensjonen fungerer som følger. I utgangsposisjon er stang 3 med bærehylle 4 og spak 7 med trykkhylle 8 i øvre posisjon og forstyrrer ikke monteringen av del 5 på opphenget. I denne posisjonen er delen 5 installert på den bærende hyllen 4, mens under påvirkning av dens vekt senkes spaken 7, stangen 9 og stangen 3, som overvinner kraften fra fjæren 10. Siden spennhyllen 8 roterer langs en større radius enn koblingspunktet til stangen 3 med vippearmene 2, vil den samtidig tilbakelegge en større avstand enn den bærende gaffelen 4, slik at delen 5 presses av klemhyllen 8 til den bærende hyllen 4. For lossing løftes dens deler opp av slagmengden til den bærende hyllen 4 og trykkhyllen 8 sammen med spaken 7 under påvirkning av fjæren 10 tilbake til den øvre startposisjonen, og dermed frigjøre delen.
Sveiv mekanismer
Av alle typer spakmekanismer er sveivmekanismer mest utbredt i teknologien på grunn av enkelheten til kinematikk, som gjør det relativt enkelt å konvertere rotasjonsbevegelse til translasjonsbevegelse, som tillater bruk i aktuatorer av teknologisk utstyr, for eksempel i mekaniske presser , og translasjonsbevegelse til rotasjonsbevegelse, som gjør at de kan brukes som en aktuator for en forbrenningsmotor. Veivmekanismen består av en sveiv 1 installert i rammen med mulighet for rotasjon (veiv eller eksentrisk aksel), en koblingsstang 2 som er dreibart koblet til den, som er dreibart koblet til glideren 3, som når sveiven 1 roterer, utfører en frem- og tilbakegående bevegelse i føringene til rammen 4 (se fig. 9).
Ris. 9. Sveivmekanisme.
I fig. Figur 10 viser veivstangmekanismen til en firesylindret forbrenningsmotor, bestående av en fireeksentrisk veivaksel 1 og fire stempelgrupper (fig. 10 viser konvensjonelt én stempelgruppe), som hver inneholder en koblingsstang 2 og en stempel 3, som er blandet i foringen til den tilsvarende sylinderen.
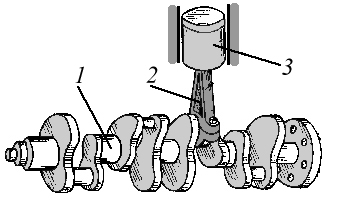
Ris. 10. Sveivmekanisme
intern forbrenningsmotor.
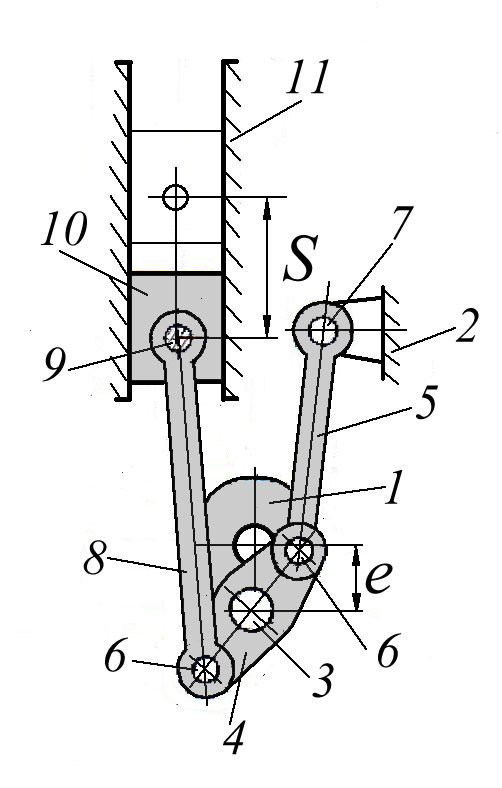
Utformingen av en rekke maskiner og utstyr krever opprettelse av et stort skyveslag og en stor kraft på slutten av slaget. I dette tilfellet brukes kne-spakmekanismer, som også inkluderer en sveiv- og koblingsstanggruppe (se fig. 11). En slik mekanisme inneholder en sveiv 1 montert på drivakselen 2, som roterer i rammens lager, en drivforbindelsesstang 4, en vippearm 6, en drevet forbindelsesstang 7 og en glider 10 som beveger seg i styrene til rammen 11 mens vippearmen 6 er dreibart forbundet med rammen ved hjelp av en akse 8, og den drevne forbindelsesstangen 7 er forbundet med glideren 10 via aksen 9 (se fig. 11a). Utgangsleddet til en slik mekanisme kan ikke være en progressivt bevegelig glider, men et svingende ledd 10, dreibart forbundet gjennom aksen 9 til den drevne forbindelsesstangen 7, og gjennom aksen 11 til rammen (se fig. 11b).
Ris. 11. Sveivmekanismer med stort skyveslag og kraft på glideren ved slutten av slaget.
Sammen med systemet med vippearmer, spaker og stenger, lar sveivmekanismen deg oppnå forskjellige slagstørrelser, hastigheter og antall slag på utgangslenken - glideren, som ofte er nødvendig i driften av en rekke maskiner og utstyr.
Ris. 12. Design av veivmekanismen med to ganger sleidens slag sammenlignet med veivakselens eksentrisitet.
I fig. Figur 12 viser et designdiagram av en veivstangmekanisme med dobbelt slag av glideren S sammenlignet med veivakselens eksentrisitetsverdi e . Den inneholder en veivaksel 1 montert på lagre i et hus 2, på hvis veivhals 3 det er en vippearm 4 forbundet via aksler 6 til en stang 5 som er dreibart montert i huset 2 på en akse 7, og en koblingsstang 8 dreibart forbundet via en akse 9 til en glider 10 som beveger seg i føringene 11. Tilstedeværelsen i utformingen av mekanismen til en vippearm 4 hengslet montert på veivakselen til veivakselen 1, forbundet med stangen 5 og forbindelsen stangen 8, gir glideren 10 økt bevegelse under dens forover- og bakoverslag.
![]()
Ris. 13. Utformingen av mekanismen tillater å doble antall slag på glideren uten å endre veivakselens rotasjonshastighet.
I fig. 13 viser utformingen av en veivmekanisme kombinert med en vippemekanisme, som gjør det mulig å doble antall slag til glideren uten å øke vinkelhastigheten på rotasjonshastigheten til drivveivakselen. Den inneholder en veivaksel 1, montert i lagre på rammen og mottar rotasjon fra et drivverk (drevet er ikke vist i fig. 13), en koblingsstang 2, en dobbeltarmsspak 3, svingbart montert på rammen ved hjelp av midler. av en akse 4 og, ved hjelp av en forbindelsesstang 5, forbundet med en glider 6 som beveger seg i sengeføringene 7.
Mekanismen fungerer som følger. Når du dreier veivakselen 1 i en vinkel på 180 grader, roterer den dobbeltarmede spaken 3 i en vinkel EN
mens glideren 6 gjør ett dobbeltslag, med ytterligere rotasjon av veivakselen 1 med ytterligere 180 grader, gjør dobbeltarmsspaken 3 igjen en sving i en vinkel EN
, går tilbake til sin opprinnelige posisjon, og glideren 6 gjør samtidig et andre dobbeltslag i en omdreining av veivakselen.
Ris. 14. Utformingen av spakmekanismen lar deg reversere bevegelsen til utgangslenken.
I noen tilfeller, i nærvær av en ikke-reversibel drift, blir det nødvendig å reversere bevegelsen til utgangslenken til mekanismen, for dette kan ytterligere koblinger bygges inn i den, som vist i fig. 14. Denne veivspakmekanismen består av en sveiv 2 montert på drivakselen 1, montert på lagre i rammen 10, svingbart forbundet ved hjelp av en akse 3 til den drivende koblingsstangen 4, som igjen er svingbart forbundet med midler. av akser 3 til den mellomliggende forbindelsesstangen 5 og den drevne ene forbindelsesstangen 6, som igjen er dreibart forbundet ved hjelp av akser 3 til henholdsvis vippearmen 6 og glideren 9. For å endre retningen på gliderens 9 frem- og tilbakegående bevegelse, flyttes vippearmen 6 fra posisjon A til posisjon B og omvendt, hvoretter den festes (låsen er ikke vist i fig. 14).

Ris. 15. Designdiagram av en helikopterskrueplate som inneholder et system av hengslede og spakmekanismer.
I fig. Figur 15 viser den opprinnelige utformingen av en kompakt automatisk svingplate som styrer bladene til et helikopters hovedrotor, laget på basis av hengslede spakmekanismer. Den inneholder en roterende ring 1 med hengslede stenger 2 som styrer hovedrotorbladene, og en spline - hengsel 3, som er installert på en ikke-roterende ring 5 ved hjelp av et kulelager 4. Drivningen av spline - hengsel 3 er festet på akselen 6 til helikopterrotordrevet girkasse. På en ikke-roterende ring 5, ved bruk av fingrene 7 og 8 og sfæriske lagre 9 og 10, beveger rammen 11 seg på ramme 11, ved hjelp av fingrene 12 og 13 og sfæriske lagre 14 og 15. TIL
Og M
en spak 16 er festet, som er montert i radielle glidelagre 19 og 20 og skyvelager 21 og 22 ved hjelp av en tapp 17 i en brakett 18 stivt montert på girkassehuset 23. Spaken 16 er laget av to armer og dens drivkraft armen er dreibart forbundet med stangen 24 for å kontrollere den felles stigningen til bladskruen De langsgående og laterale styrestengene 25 og 26 er dreibart forbundet med en ikke-roterende ring 5 på motsatte sider i forhold til den kollektive stigningskontrollstangen 24. Tilstedeværelsen av sfæriske lagre 9, 10, 14, 15 i utformingen av maskinen sikrer rotasjon av den roterende ringen 1 langs kulen, noe som er nødvendig for normal drift av helikopterkontrollsystemet. I dette tilfellet går aksen gjennom sentrene til sfæriske lagre 9 og 10 G
Og D
og en akse som går gjennom sentrene til sfæriske lagre 14 og 15 TIL
Og M
innbyrdes vinkelrett, og plasseringen av rammen 11 og spaken 16, utformet for å kontrollere den totale stigningen til propellbladene og holde den ikke-roterende ringen 5 fra forskyvning og rotasjon i forhold til drivakselens 6 akse, er vilkårlig i forhold til planet for den langsgående og tverrgående kontrollen av maskinen - skjev. Rotasjonsaksen til spaken 16 er parallell med aksen som går gjennom punktene TIL
Og M
.
Svingplatemaskinen fungerer som følger. Den sykliske stigningen til propellbladene styres ved å vippe den roterende ringen 1 med kontrollstengene 25 og 26 i forhold til de to bevegelsesaksene til punktene EN
Og I
. I dette tilfellet roterer den roterende ringen 1 og den ikke-roterende ringen 5 i de sfæriske lagrene 9 og 10 i forhold til rammen 11 og rammen sammen med den roterende ringen 1 og den ikke-roterende ringen 5 i de sfæriske lagrene 14 og 15 i forhold til spaken 16. Den totale stigningen til propellbladene styres av bevegelige punkter P
spaken 16 ved styrestangen til den kollektive stigningen 24. Siden spaken 16 er hengslet på braketten 18, stivt montert på girkassehuset 23, forskyves den ikke-roterende ringen 5 og roteres radialt R
i forhold til aksen som går gjennom aksen til braketten 18 og er forskjøvet i forhold til aksen til akselen 6 med en ubetydelig mengde. Når man sammen kontrollerer den generelle og sykliske stigningen til propellbladene, beveger punktene seg samtidig A, B
Og P
. I dette tilfellet skjer en samtidig vipping og bevegelse av den faste ringen 5 og den bevegelige ringen 1.
Vippemekanismer
Vippemekanismer er mekanismer som inneholder to spesifikke ledd: en vippestein og en vippestein (se fig. 16), som hver, utfører en rotasjons- eller vippebevegelse, beveger seg progressivt i forhold til hverandre. Tilstedeværelsen av to slike ledd i mekanismen fører til forskjellige bevegelseshastigheter for det drevne leddet under dets forover- og bakoverbevegelse, noe som i noen tilfeller er en fordel med mekanismen, og i noen tilfeller en ulempe og generelt bestemmer området for dens bruk. Det er to hovedtyper av vippemekanismer som er forskjellige i bevegelsen vippen gjør, dette er mekanismer med vippe- og rotasjonsbevegelse

Ris. 16. Typer vippemekanismer
I fig. 16a vist mekanisme med gyngende bevegelse av scenene
bestående av en sveiv 1, på hvis akse 2 er plassert en vippestein 3, som har mulighet for translasjonsbevegelse i sporet til vippen 4, svingbart montert på et stasjonært stativ ved hjelp av en akse 5 og gjør en vipping bevegelse når sveiven 1 roterer. I dette tilfellet gjør vippen 4 et slag fremover når sveiven dreies 1 per hjørne EN
, og det omvendte slaget når du dreier sveiven i vinkel I
, noe som fører til en forskjell i hastigheten fremover og bakover på grunn av ulikheten i disse vinklene. I fig. 16b vist mekanisme med rotasjonsbevegelse av scenene
bestående av en sveiv 1, på hvis akse 2 en vippestein 3 er plassert og en vippe 4, svingbart montert på et stasjonært stativ ved hjelp av en akse 5 og utfører en rotasjonsbevegelse når sveiven roterer 1. Med denne utformingen av vippemekanismen bestemmes forskjellen i hastigheten på vippebevegelsen fremover og bakover også av forskjellen i vinkler EN
Og I
.
Sammenlignet med den hengslede fireleddsmekanismen som brukes til samme formål (se fig. 3), gjør vippemekanismen det lettere å sikre utformingen av drivsveiv og drevet vippe ved å plassere dem symmetrisk i forhold til fellesaksen, som noen ganger er nødvendig under design. Men på samme tid har vippemekanismen økt tap på grunn av ekstra glidefriksjon i vippeparet og brukes derfor hovedsakelig i lett belastede hjelpemekanismer til teknologisk utstyr.
Ris. 17. Sveivmekanismen endrer vinkel
sving av det drevne leddet.
I fig. 17. viser designdiagrammet for vippemekanismen som brukes til å øke eller redusere svingningsvinkelen til det drevne leddet i forhold til drivleddet. Den består av en sveiv 1 montert på en aksel 2, som overfører dreiemoment til den, koblet til den via en akse 3, en vippestein 4 og en vippe 5 montert på en akse 6, montert for rotasjon på glidelagre. Når sveiv 1 dreies i vinkel EN Skrue 5 roterer i vinkel I , som for et gitt forhold mellom lengdene til veiv 1, ledd 5 og avstanden mellom dem, dobles. Og omvendt, med drivleddet 5, vil sveiven 1 rotere i en vinkel på halvparten så mye.
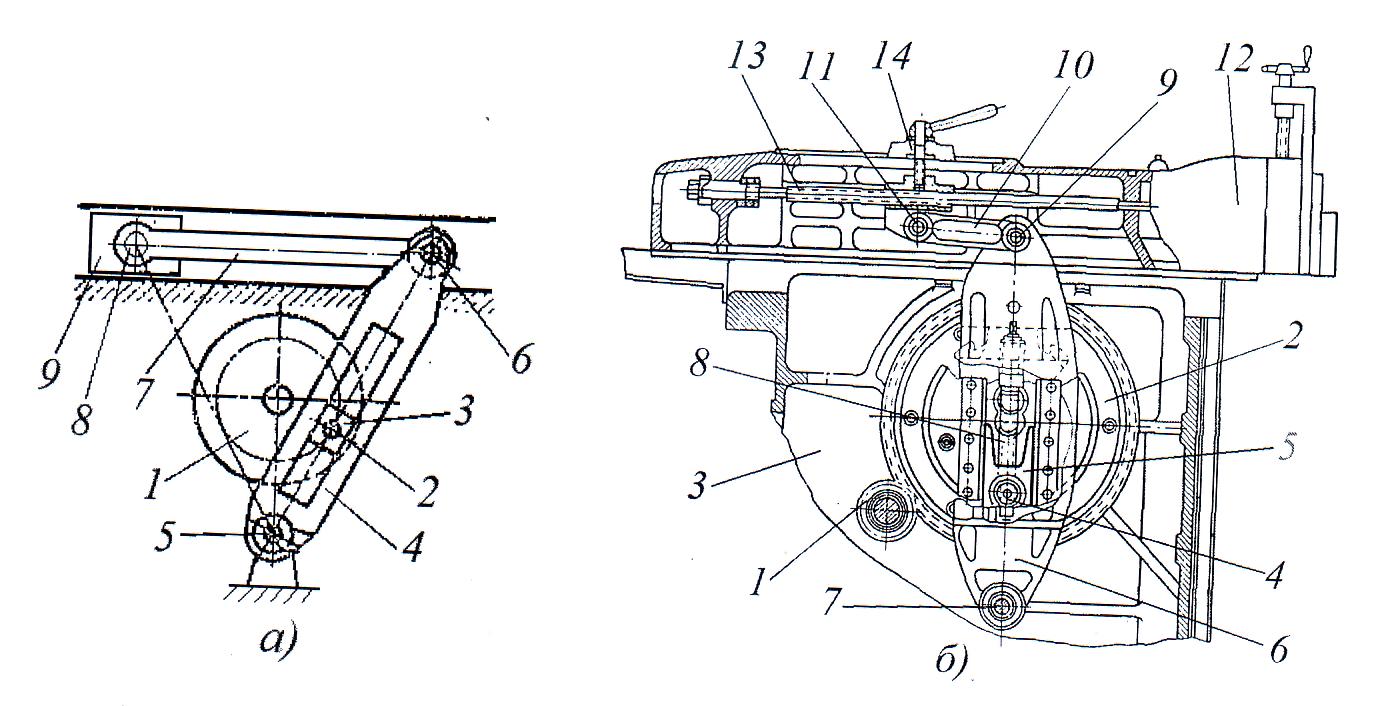
Ris. 18. Sveivmekanisme for å kjøre en kryssplaningsmaskin.
Imidlertid kan vippemekanismen i en rekke tilfeller også brukes som aktuator for teknologisk utstyr. Et eksempel på dette er kaliperdriften til en kryssplanemaskin, vist i fig. 18. Den består av en sveiv 1 montert på en aksel som roterer på lagre i rammen, forbundet gjennom en akse 2 og en vippestein 3 med en vippe 4, svingbart montert i rammen gjennom en akse 5, og ved hjelp av akse 6 koblet til koblingsstang 7, som gjennom akse 8 er dreibart forbundet med glider 9 (se fig. 18a). I utformingen av aktuatoren til tverrhøvelen (se fig. 18b), i tillegg til lenkene som er oppført i kinematisk diagram, er det anordnet et veivdrev i form av et tannhjul 1 - 2, skrue 8, for å justere eksentrisiteten av veivaksen 4, hvis verdi bestemmer slaglengden til vognen 12 (glideren), ledeskruen 13 og klemmen 14 som fikserer dens posisjon er nødvendig for å justere startposisjonen til vognen 12 til maskinen.

Ris. 19. Sveivmekanisme til pressen.
Ved å bytte ut til pressen med en vippemekanisme kan du minimere gapet mellom den eksentriske akselen og glideren, samt forenkle og øke nøyaktigheten av å justere størrelsen på pressens mellomstempel ( se fig. 19). Dens utforming inneholder en ramme 1, i føringene 2 som det er en glider 3 forbundet med en eksentrisk aksel 4 gjennom en vippestein 5, ruller 7 og en vippe 6 plassert inne i glideren 3 og i kontakt med den ved hjelp av en nøkkel 9 og en skrue 8. For å sikre koblingen av steinen 5 og backstage 6 av minimumsgapet som kun kreves for å skyve steinen 5 i sporet til backstage 6, er det installert en kilemekanisme mellom dem, bestående av en kile 10 og en justeringsskrue 11. For nøyaktig justering av størrelsen på mellomstempelrommet er en skrue 8 tilveiebrakt, hvis rotasjon fører til bevegelsen av backstage til høyre eller venstre 6 langs det skrånende sporet på glideren 3 hvor den er plassert, som et resultat av at glideren beveger seg opp eller ned. Når den eksentriske akselen 4 roterer, gjør steinen 5 en flat, parallell bevegelse, hvis vertikale komponent overføres til glideren 3 på grunn av steinens 5 evne til å bevege seg fritt på ruller 7 i horisontal retning i sporet til lysbildet 6.

Ris. 20. Mekanisme med en roterende sleide.
I fig. Figur 20 viser en mekanisme med en roterende sleide som brukes i spilleautomater for å øke returhastigheten, kalt Whitworth-mekanismen. Den inneholder et tannhjul 1 som er i inngrep med et tannhjul 3 plassert på en akse 5 og gir rotasjon til det med konstant hastighet, en vippestein 4 som passer inn i sporet til en roterende vippe 2, hvis akse 6 går gjennom aksen 5 og er forskjøvet i forhold til rotasjonsaksen til hjulet 3 med mengden av eksentrisitet e , samt koblingsstang 7 koblet til maskinskyveren. Siden rotasjonssenteret til vippen 2 er forskjøvet i forhold til rotasjonsaksen til tannhjulet 3, som i dette tilfellet er sveiven, roterer vippesteinen 4 i en vinkel under arbeidsslaget EN , og under det omvendte slaget i vinkel I . Fordi vinkelen EN mer vinkel I med en mengde bestemt av størrelsen på eksentrisiteten, så er revershastigheten til sleiden 2 og forbindelsesstangen 7 knyttet til den større enn hastigheten til arbeidsslaget med en mengde proporsjonal med forholdet mellom disse vinklene.
Ris. 21. Vippemekanisme som overfører stoppbevegelse til den drevne akselen.
En vippemekanisme kan brukes til å overføre rotasjon fra en drivaksel som roterer med konstant hastighet til en drevet aksel som roterer intermitterende. Utformingen av en slik mekanisme er vist i fig. 21. Den inneholder, installert i huset 9 og roterende med konstant hastighet, en drivaksel 4 med en eksentrisk 7 som er stivt festet til den, på hvilken det er montert en to-arms forbindelsesstang 8, hengslet forbundet med drivsleidene 2 og festingen 6, samt montert på akselen 4 med mulighet for fri rotasjon av den drevne flensen 1 med en hylse 11 og leddet 10 med en hylse 12. I dette tilfellet er flensen 1 laget med radielle spor 3, inn i hvilken, når eksentrikken 7 roterer med koblingsstangen 8, går drivsleiden 2 vekselvis inn, og festesleiden 6, som konstant glir langs det vertikale sporet 5 i et stasjonært hus 9, blir periodisk satt inn i sporene til den drevne flensen 1. Når drivakselen 4 roterer med eksentrikken 7, setter og fjerner den dobbeltarmede forbindelsesstangen 8 med jevne mellomrom fra sporene 3 på den drevne flensen 1 drivverket 2 og festesleiden 6, noe som fører til rotasjon av den drevne flensen 1 når drivsleiden 2 settes inn i sporet 3 og den drevne flensen 1 stopper når låsesleiden 6 settes inn i sporet 3. Antall spor 3 i den drevne flensen 1 bestemmer forholdet mellom dens rotasjonshastighet og rotasjonen hastigheten til drivakselen 4. Ved begynnelsen av drivsleiden 2 som går inn i den spordrevne flensen 1, begynner denne å rotere sakte, deretter øker hastigheten raskt og når glideren 2 kommer ut av inngrep avtar den igjen, noe som eliminerer støt og slag selv ved høye hastigheter på mekanismen.
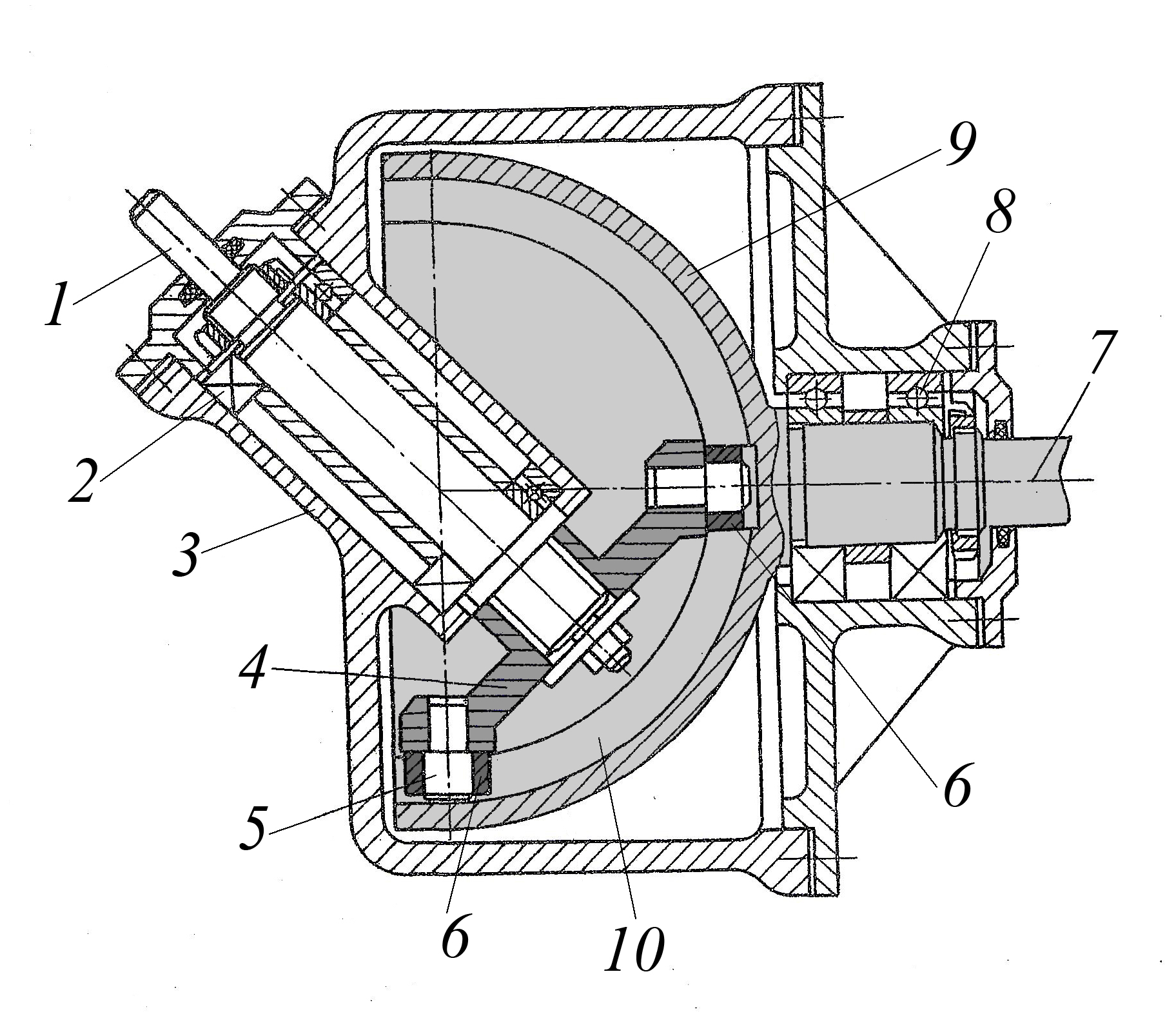
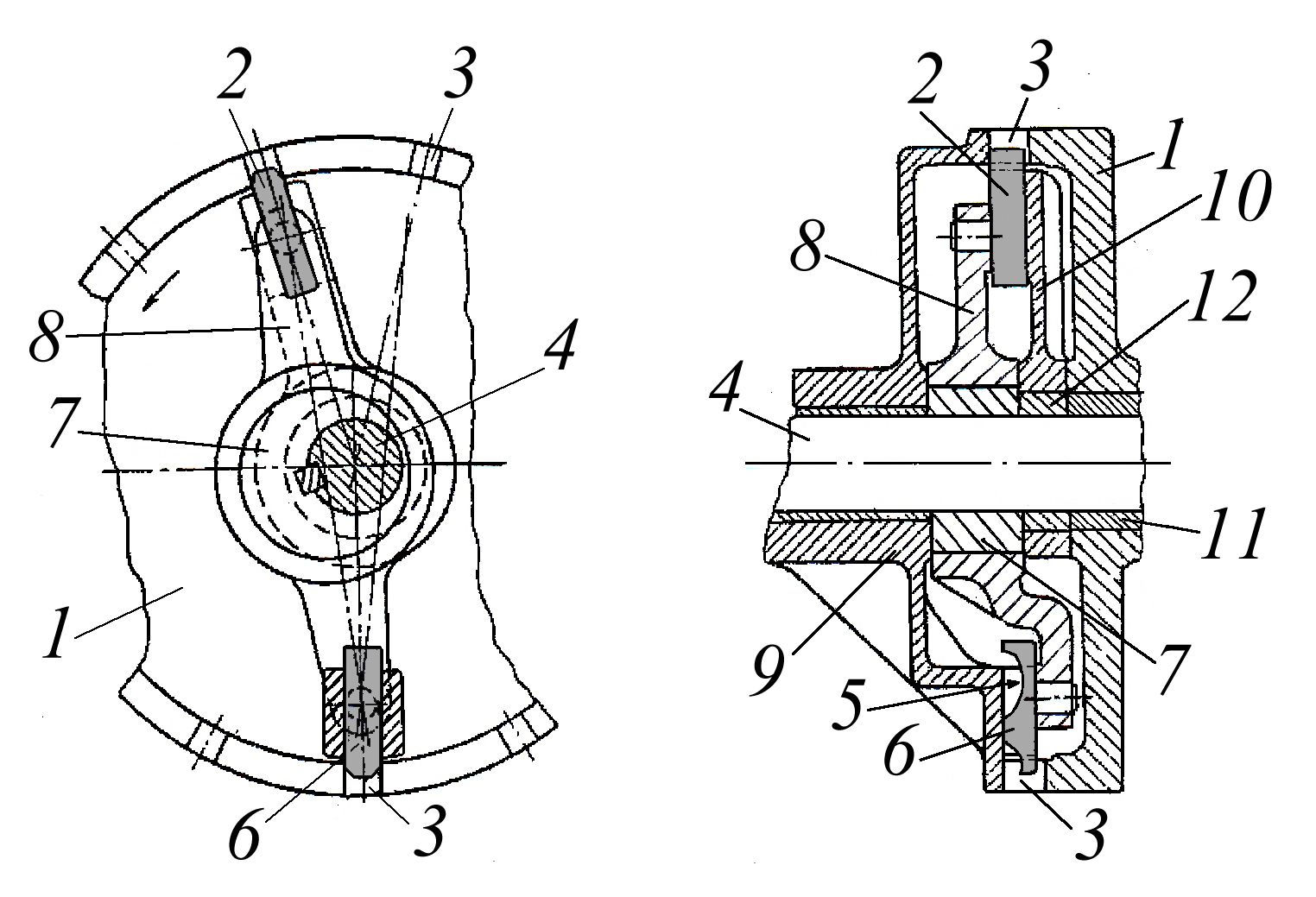
Fig. 22 Utforming av vippemekanismen, drivaksen og drevne aksler
som skjærer hverandre i en vinkel på 45 grader
I fig. Figur 22 viser utformingen av en vippemekanisme som gjør at bevegelse kan overføres mellom aksler som krysser hverandre i en vinkel på 45 grader. Denne mekanismen inneholder en drivaksel 1 installert i et hus 3 ved hjelp av lagre 2, ved den nedre ende av hvilke en sveiv 4, en støttesvev 4, dreibart montert på aksler 5, glidere 6, samt en utgående aksel 7 montert på lagre 8 i huset 3, som er laget i ett stykke med sleiden 9, som har to spor 10 som skjærer hverandre i en vinkel på 90 grader som gliderne 6 til sveiven 4 er i kontakt med.
Mekanismen fungerer som følger. Når sveiv 4 dreies i vinkel 2𝝅
gliderne 6 beveger seg langs sporene 10, og roterer samtidig skyveren i en vinkel 𝝅
, således er girforholdet fra sveiv 4 til vippe 9 lik 2
. Utformingen av mekanismen gjør det mulig å overføre bevegelse fra sleiden 9 til sveiven 4 (i dette tilfellet blir akselen 7 den drivende, og akselen 1 blir den drevne). I dette tilfellet vil girforholdet være lik 0,5
.
Spakmekanismer med tillegg
strukturelle elementer
Når spakmekanismer brukes som en del av teknologisk utstyr og tilbehør, for å sikre effektiv drift, er ytterligere strukturelle elementer innebygd i den, som gjør det mulig å løse følgende oppgaver:
− juster slagverdien til utgangsleddet (glider, spak, vippe),
− juster den første (endelige) posisjonen til utgangskoblingen,
− beskytte mekanismedelene mot skade,
− kommunisere kompleks bevegelse til utgangslenken
− slå mekanismen på og av,
La oss vurdere eksempler på den konstruktive implementeringen av slike spakmekanismer. Regulering av slagverdien til utgangsleddet til spakmekanismen utføres på to måter, ved å endre forholdet mellom spakearmene, eller ved å endre eksentrisitetsverdien til drivsveiv.

Fig. 23 Design av en enhet som lar deg justere lengden på den fremste armen.
Figur 23 viser utformingen av en enhet innebygd i spaken til en lettlastspakmekanisme, som lar deg justere lengden på den fremste armen. Denne spaken, som består av en ledende 1 og en drevet 2 arm og montert på en akse 3, har en innebygd tapp 6, hengslet forbundet via en akse 5 til drivstangen 4 og festet i ønsket posisjon i sporet 10, og en justeringsskrue 7 settes inn i dets gjengede hull. I dette tilfellet er den drevne armen 2 til spaken dreibart forbundet med akselen 8s drevne ledd. Ved justering av lengden på spakens fremre arm 1 skrus mutteren 9 ut, deretter flyttes tappen 6 til den ene eller andre siden langs sporet til spakens fremre arm 1 ved hjelp av justeringsskruen 7, og deretter tappen 6 låses deretter med mutteren 9.
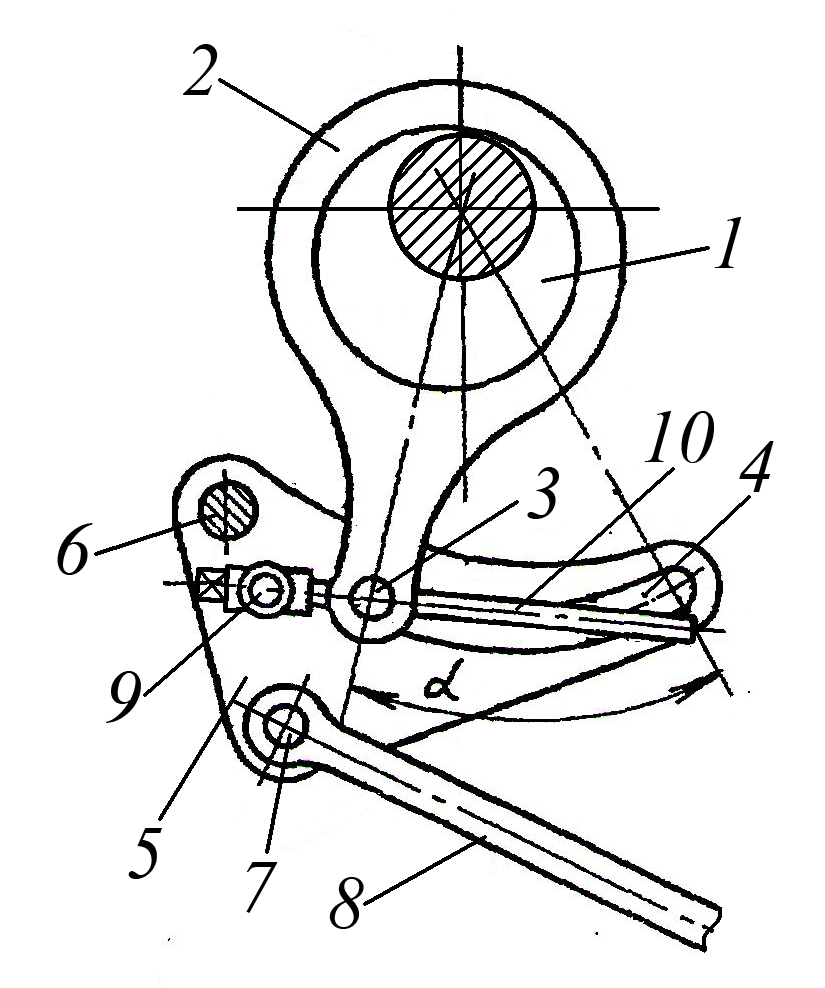
Fig. 24 Utforming av sveivmekanismen med en enhet for justering av slaglengden til utgangsleddet
Figur 24 viser utformingen av sveivmekanismen med en innebygd enhet for justering av utgangsleddets slag, som er laget i form av en mellomliggende dobbelarmsspak med justerbar lengde på drivarmen veivaksel 1, på hvis veiv er installert en koblingsstang 2, dreibart forbundet via akse 3 med en mellomliggende dobbelarmspak 5 montert på rammen via akse 6, og via akse 7 forbundet med den drevne stangen 8. samtidig, på den mellomliggende spaken 5 via akse 9, er en ledeskrue 10 hengslet montert, på hvilken en mutter er plassert (mutteren på fig. 34 ikke vist) er dreibart forbundet med aksen 3 til koblingsstangen 2 og har evnen, som en glider, til å bevege seg i radiussporet 4 på den mellomliggende spaken 5. Når ledeskruen 10 roterer, roterer koblingsstangen 2 i en vinkel αi som fører til en endring i størrelsen på den fremre armen til den mellomliggende spaken 5, og endringsforholdet mellom lengdene på dens drevne og drivende armer gjør det mulig å endre slagverdien til den drevne stangen 8 til mekanismen. Den betraktede innretningen for justering av slaglengden til utgangsleddet til mekanismen skiller seg gunstig fra den som er diskutert tidligere ved at den tillater, når du foretar justeringer, å opprettholde startposisjonen til utgangsleddet (stang 8), som sikres ved tilstedeværelsen i den mellomliggende spaken 5 til et radiusspor 4, hvis senter sammenfaller med veivakselens 1 akse, derfor, når du foretar justeringer, endrer ikke posisjonen til mellomspaken 5 å dreie forbindelsesstangen 2.

Ris. 25. Eksentrisk skaftdesign, med justerbar eksentrisitetsverdi.
I fig. 25 viser utformingen av en eksentrisk aksel, hvor dens eksentrisitet justeres ved å rotere en eksentrisk hylse installert på den tilsvarende overflaten av akselen. Den foreslåtte utformingen av den eksentriske akselen består av en aksel 2, på den eksentriske halsen 1 som det er en eksentrisk hylse 3 av, med spor 4 på den indre sylindriske overflaten som en nøkkel 5 kan passe inn i, plassert i sporet 8 på akselen. eksentrisk hals 1 og hviler på fingrene 6 fjærbelastet av fjærer 7. I dette tilfellet er ringene 9 og 10 installert ved endene av nøkkelen 5, som hver har en utsparing 11 på innsiden, begrenset av en spiralflate 16 med et maksimum dybde lik høyden på sporet 4. For aksial fiksering av ringene 9 og 10 og den eksentriske bøssingen 3 i de eksentriske sporene. Akslingens 2 akseltapper 1 er utstyrt med halvringer 12, stivt festet i dem. i radiell retning er fjærbelastede kuleklemmer 13 montert i ringene 9 og 10. For å rotere ringene er det laget hull 14 i dem, og for rotasjon av den eksentriske hylsen 3 er det laget hull 15 i den.
Den eksentriske hylsen 3 justeres som følger. Ringene 9 og 10 roteres gjennom hullene som stangen eller brekkjernet settes inn i inntil nøkkelen 5 er fullstendig fjernet fra sporet 4 på den eksentriske hylsen 3. Etter dette roteres den eksentriske hylsen 3 til ønsket vinkel, som en Resultatet av hvilket verdien av eksentrisiteten til akselen 2 endres. Deretter roteres ringene 9 og 10 på lignende måte inntil kilen 5 går inn i det tilsvarende sporet 4 i den eksentriske bøssingen og inn i utsparingen 11 i ringene. dens skrå sideflate mot den tilsvarende skrånende overflaten av utsparingen 11. Dette er prosessen med å justere posisjonen til den eksentriske bøssingens 3 ender.
Ris. 26. Design av en kileanordning for jevn justering av eksentrisiteten til den eksentriske akselen.
I fig. 26 viser utformingen av en kileanordning for jevn justering av eksentrisiteten til den eksentriske akselen. Den inneholder en drivaksel 1 på hvilken det er montert kiler 2 og 3, som med sine kileflater er i kontakt med kilenes 4 og 5 sammenfallende flater, som har mulighet for aksial bevegelse i eksentrikkens 6 og langsgående spor. radiell bevegelse i de tilsvarende sporene til flensen 7, sistnevnte er installert på akselen 1 med mulighet for aksial bevegelse ved hjelp av en mutter 9 plassert på den gjengede delen av akselen. I dette tilfellet er eksentrikken 6 festet på akselen 1 i aksial retning ved hjelp av en mutter 8, og mutteren 9 er forbundet med flensen 7 ved hjelp av halvringer 10, 11 og skruer 12.
Enheten fungerer som følger. Hvis det er nødvendig å endre eksentrisiteten til den eksentriske akselen 1, ved å rotere mutteren 9, flytt flensen 7 i ønsket retning, mens kilene 4 og 5, glir langs motflatene til kilene 2 og 3 festet til akselen 1, beveger seg i aksial retning sammen med flensen 7 og glir radialt langs overflaten av sporet laget i den. Som et resultat av slik bevegelse av kilene 4 og 5, beveger eksentrikken 6 seg i radiell retning, og øker eller reduserer eksentrisiteten til den eksentriske akselen.
Hvis utgangsleddet til spakmekanismen er en glider, justeres dens utgangs- eller sluttposisjon ved å endre lengden på forbindelsesstangen som er koblet til den, og hvis utgangsleddet til spakmekanismen er en spak eller vippearm, vinkelposisjonen justeres. La oss se på eksempler på utformingen av enheter for å justere posisjonen til utgangslenken til en spakmekanisme.

Fig. 27 Spakmekanisme med innledende justering
utgangskoblingsposisjon
Figur 27 viser utformingen av en spakmekanisme der overføringen av bevegelse fra den eksentriske akselen til skyveren utføres gjennom en mellomliggende dobbelarmsspak. Den inneholder en eksentrisk aksel 1, en koblingsstang bestående av et hus 2 montert på veivstiften til den eksentriske akselen og en stang 3, hvis gjengede ender er forbundet med hverandre ved hjelp av en gjenget kobling 4, hvis posisjon er festet med låsemuttere 5, samt en dobbeltarmsspak 7, dreibart montert på aksen 8, på hvis drevne arm en rulle 10 er installert på aksen 9, som er i konstant kontakt med skyveren 11. Denne utformingen av koblingsstangen tillater, ved å justere lengden, ved å skru eller skru av de gjengede endene av legemet 2 og stangen 3 inn i koblingen 4, å endre posisjonsspaken 7 og følgelig utgangsposisjonen til skyveren 11, hva er nødvendig når du setter opp mekanismen som en del av utstyret?

Fig. 28 Sveivmekanisme med innretning for endring av lengden på koblingsstangen
Figur 28 viser utformingen av veivaksel-koblingsstangmekanismen til pressen, hvor startposisjonen til glideren justeres ved å endre lengden på koblingsstangen. Den inneholder en koblingsstang 1 installert på veivtappen 3 på veivakselen og koblet til glideren 5 på veivmekanismen via en eksentrisk bøssing 2 og en akse 4 plassert i dens hull, mens i øyet 7 på den eksentriske bøssingen 3 en akse 8 med en bøssing 9 er hengslet montert, i en gjenget bevegelse bort fra hvilken justeringsskruen 10 er plassert. Kulestøtten 12 til skruen 10 er installert i glasset 14 på trykklageret 15 og er festet av dekselet 17. , mens det firkantede skaftet 16 på skruen føres gjennom hullet i dekselet 17. Vevstangen 1 er i kontakt med veivakselen 3 ved hjelp av et glidelager 18, med den eksentriske foringen 2 ved hjelp av et glidelager 19, og den eksentriske foringen 2 med aksen 4 ved hjelp av et glidelager 20. den aksiale retningen er akse 4 festet med en skive 21 og bolter 22.
For å endre lengden på koblingsstangen 1, dreies justeringsskruen 10 av det firkantede hodet 16 i ønsket retning, som når den skrus inn eller skrus av gjengebøssingen 9, tvinger den eksentriske bøssingen 2 til å rotere rundt aksen 4 , og endrer derved posisjonen til dens akse, forlenger eller ved å forkorte forbindelsesstangen 1, noe som fører til en endring i utgangsposisjonen til glideren 5
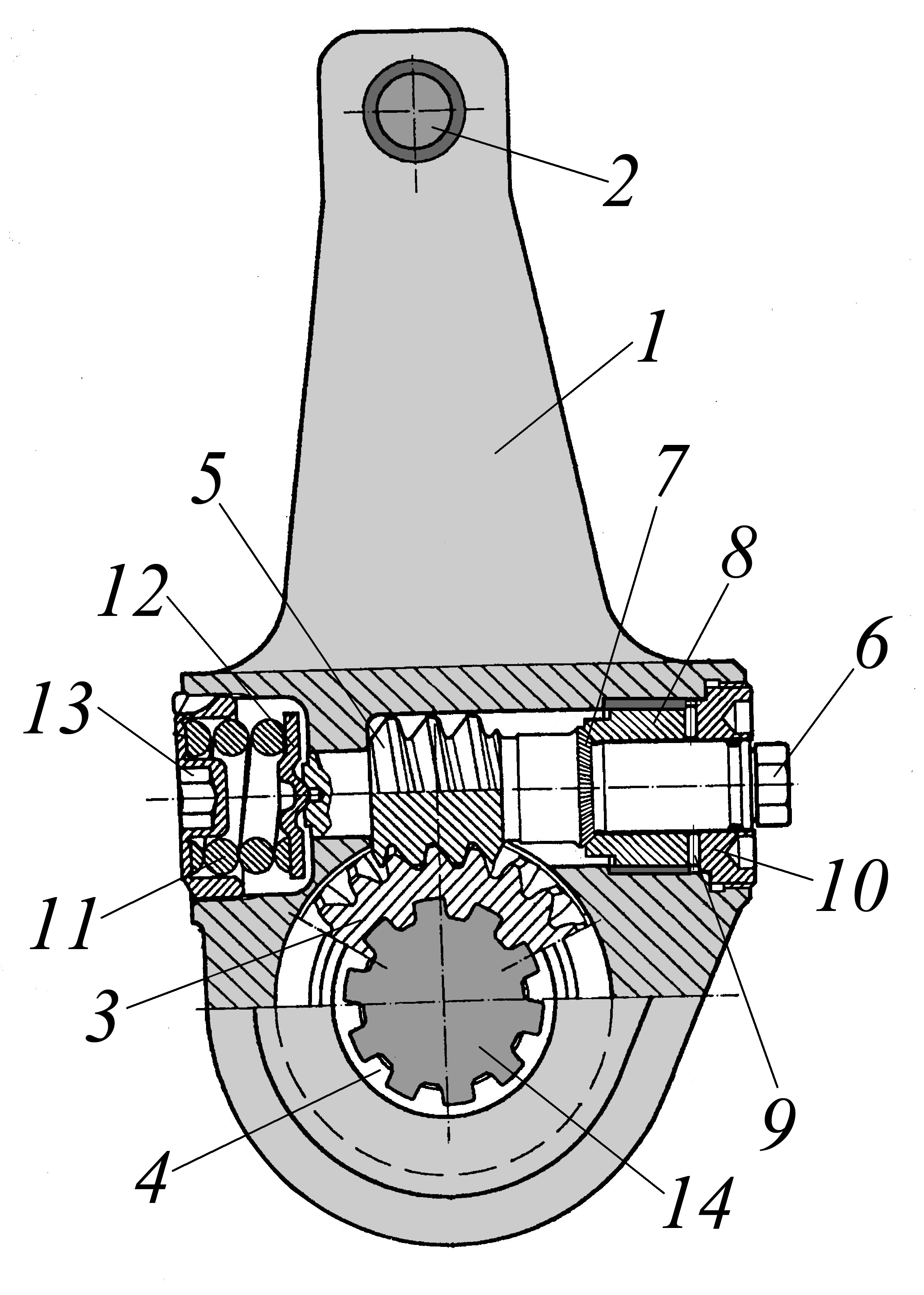
Fig. 29 Vippe med innebygd anordning for justering av vinkelposisjonen
Figur 29 viser utformingen av en enhet innebygd i vippearmen, som lar deg justere dens vinkelposisjon i forhold til aksen den er installert på. Denne innretningen, innebygd i vippearmen 1, som er dreibart forbundet gjennom aksen 2 til drivstangen til spakmekanismen, består av et snekkehjul 3 plassert i boringen til vippearmen og med sine innvendige splines 4 er i kontakt med splinesen. overflaten av aksen 14, og går også i inngrep med snekken 5 installert i boringen til vippearmen, laget vinkelrett på aksen til snekkehjulet. I dette tilfellet er den venstre tappen til ormen 5 med den sekskantede enden 6 plassert i hullet i dekselet 10, gjennom et sett med ruller 9, i kontakt med hylsen 8, på den høyre ende av hvilken det er koniske tenner 7, hvilken kontakt med de parrende tennene laget på ormen 5, danner et inngrep. Den venstre ende av snekken 5 med dens sentrale koniske hull er i kontakt med motflaten til den elastiske skiven 12, som presses av fjæren 11 og dekselet 13.
Justering av vinkelposisjonen til vippen 1 i forhold til aksen 14 utføres som følger. For å dreie vippen 1 i en eller annen retning, roteres snekken 5 av et sekskantet hode 6 med en skiftenøkkel i ønsket retning, mens rotasjonen overføres til snekkehjulet 3, som er festet ved hjelp av en splineforbindelse på akselen 14, forblir ubevegelig, og vippen 1 roterer i ønsket retningsside, og endrer sin vinkelposisjon i forhold til akselen 14.
Gliderne til sveiv- og koblingsstangmekanismer, som er aktuatorene til teknologisk utstyr, spesielt mekaniske presser, er underlagt strenge krav til posisjon og bevegelse i forhold til utstyrets basisdel (for en mekanisk presse er dette kravet for vinkelrett på skyveslaget til bunnflaten av bordet), derfor har skyveføringene passende anordninger for å justere deres posisjon.

Fig. 30 Design av en enhet som lar deg justere posisjonen til glideren
i to plan.
Figur 30 viser utformingen av en enhet som lar deg justere posisjonen til glideren i to plan. Denne innretningen inneholder føringer 4 av sleiden 10, montert på rammen 1 med mulighet for justering i to plan, samt en gjenget bøssing 3 installert i det gjengede hullet på føringen 4, i kontakt med rammen 1 v.h.a. en sfærisk skive 7 og en tapp 14, samt en formet skive 9, med et sekskantet hode og rektangulære fremspring som fungerer som føringer i kontakt med sammenfallende spor i den gjengede foringen 3 og mutter 12. For å justere posisjonen til føringene i frontplanet, løsne skruen 8 og ved å rotere den formede skiven 9, flytt bøssingen 3 i det gjengede hullet på aksen 2, noe som fører til en endringsposisjon av føringen 4. Etter å ha fullført den nødvendige justeringen, skruen 8 strammes For å justere posisjonen til føringene i planet vinkelrett på fronten, løsnes tiltrekkingen av mutteren 12 og på samme måte, ved å dreie den formede mutteren 9, flyttes føringen 4 til ønsket mengde. hvoretter mutteren 12 strammes.
I en veivmekanisme som fungerer som en del av teknologisk utstyr, oppstår den maksimale kraften når veivtappen til den eksentriske akselen roteres i området ± 15 grader i forhold til det øvre og nedre punktet, som et resultat av at det resulterende dreiemomentet ikke er maksimalt, og derfor beskytter ikke de kjente utformingene av sikkerhetsanordninger (sikkerhetskoblinger innebygd i mekanismen) den mot mulig overbelastning. I forbindelse med dette bygges sikkerhetsinnretninger direkte inn i veivmekanismens ledd.
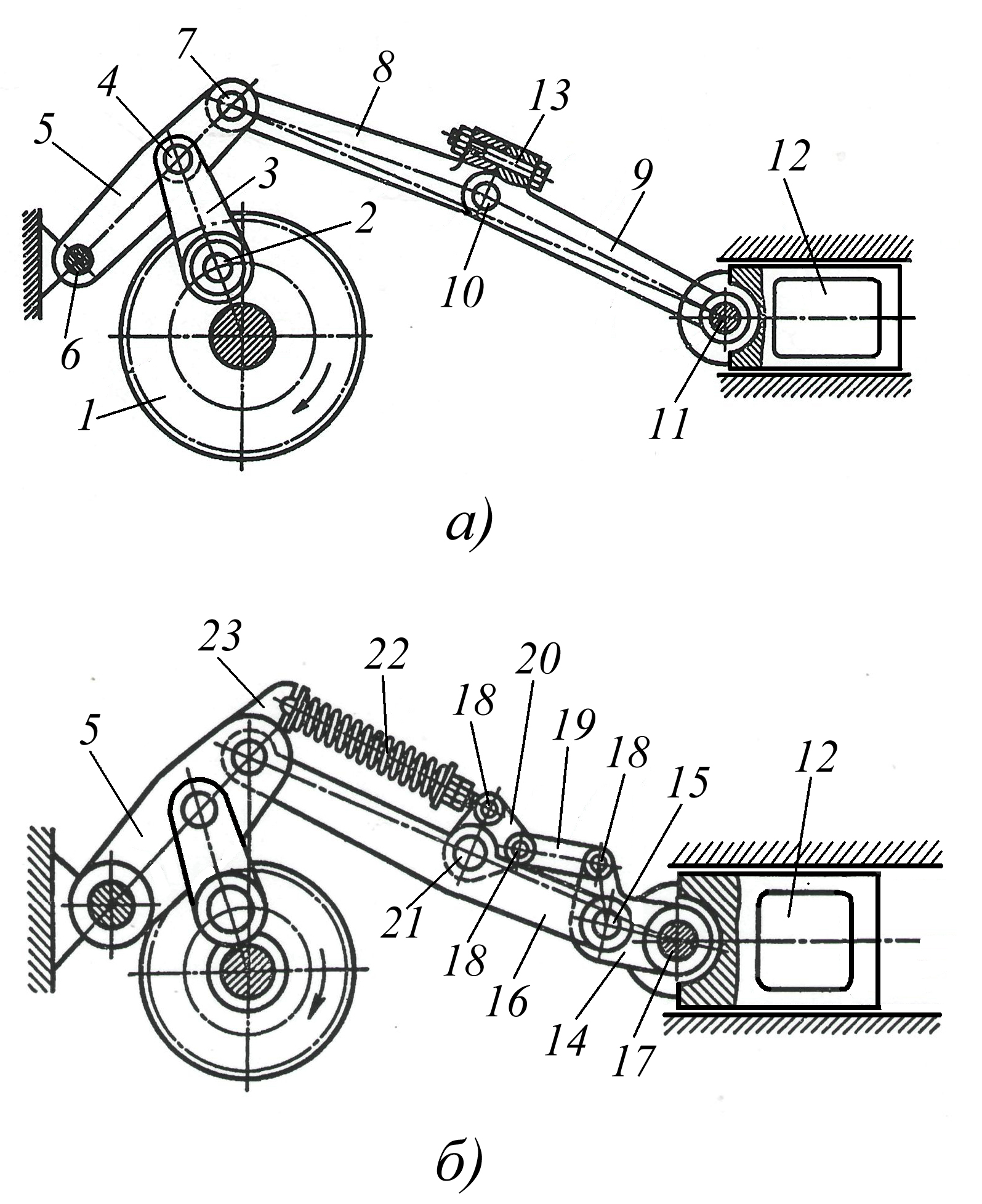
Fig. 31 Utformingsmuligheter for sikkerhetsinnretninger innebygd i veivmekanismens vevstang.
Figur 31 viser to designalternativer for sikkerhetsinnretninger innebygd i vevstangen til sveivmekanismen. Mekanismens veivaksel er laget i ett stykke med tannhjulet 1, og veivstiften 2 er dreibart forbundet med forbindelsesstangen 3, som igjen er forbundet via akse 4 til vippearmen 5 montert på rammen ved hjelp av akse 6 , og via akse 7 er forbundet med sammenstillingen en koblingsstang bestående av en drivdel 8 og en drevet del 9, forbundet med hverandre ved en akse 10 med en sikkerhetsbolt 13 (se fig. 31a), mens koblingsstangen er koblet til glideren 12 gjennom aksen 11. Når belastningen øker, overskrider sikkerhetsbolten som virker på glideren 12 de tillatte 13 pausene, deler av forbindelsesstangen 8 og 9 roterer i forhold til hverandre på akse 10 og bevegelsen fra veivakselen til glideren 12 blir ikke overført, noe som sikrer at komplekse deler av mekanismen forhindres i å gå i stykker. Etter å ha eliminert årsakene til økningen i kraft som virker på glideren 12 og erstattet sikkerhetsbolten 13, kan mekanismen fortsette å virke.
Figur 31b viser en versjon av mekanismen med en innebygd selv-tilbakestillende sikkerhetsmekanisme. Den inneholder en koblingsstang 16 i ett stykke som er hengslet forbundet ved hjelp av aksene 15, 17 og en mellomliggende dobbeltarmet spak 14 med en glider 12, og spaken 14 ved hjelp av aksene 18, en stang 19 og en dobbeltarmet spak 20 , hengslet montert ved hjelp av en akse 21 på koblingsstangen 16, gjennom en trykkfjær 22 forbundet med fremspringet 23 på vippearmen 5. Når belastningen øker, overskrider fjæren 22 som virker på glideren 12 den tillatte grensen, og forbindelsesstangen 16 og dobbeltarmsspaken 14 på aksen 15 roterer i forhold til hverandre, og eliminerer således overføringen av bevegelse fra veivakselen til glideren. Etter å ha eliminert årsakene til økningen i kraft som virker på glideren 12, går fjæren 22 tilbake til sin opprinnelige posisjon, og returnerer alle delene av sikkerhetsanordningen (spak 14, stang 19 og spak 20), som et resultat av at mekanismen kan fortsette å fungere.

Ris. 32. Design av vippeaktuatoren for overføring av produktet mellom transportører plassert i forskjellige høyder.
I fig. 32 viser utformingen av en tilter for overføring av et produkt mellom transportører plassert på forskjellige høydenivåer, laget i henhold til utformingen av en fire-stangs leddkonstruksjon, i hvilken ikke-drevne sylindriske og vinkelgir er innebygd, slik at delen kan endre posisjon mens du beveger deg. Den er montert på et stativ 1, installert mellom transportører 2 og 3 plassert i forskjellige høyder. Vippeoverføringsmekanismen er laget i form av et fireleddet hengsel, utstyrt med en produktgripemekanisme med rotasjonsdrev. Overføringsmekanismen består av en akse 4 og en aksel 5 montert på lagre i boringene til tannstangen 1, med spaker 6 og 7 festet til dem og en motvekt 8 montert på motsatt ende av akselen 5, et gir 9 montert på akselen 5 og inngrep med en tannstang 10, stivt forbundet med en hydraulisk sylinderstang 11 montert på en tannstang 1. De motsatte ender av spakene 6 og 7 er dreibart montert i huset 13 ved hjelp av en giraksel 14 og en akse 15, mens tannhjulsakselen 14 går i inngrep med et tannhjul 22 som er fritt montert på akselen 16 til rotasjonsdrevet til gripemekanismeproduktet og forbundet med dette ved hjelp av en driver 21 og en flens 20. Produktgriperen er laget i formen av en tapp 29, stivt montert på akselen 17 og inneholder to stoppere 30 og 31 som begrenser rotasjonen av akselen 17. Rotasjonsdriften til produktgriperen inneholder montert på akslene 16 og 17 og inngrep med koniske tannhjul 18 og 19 og et fjæranordning bestående av en blokk 24, bevegelige stoppere 25 og 26 og fjærer 27 og 28, som er plassert i det ringformede sporet 23 på tannhjulet 22.
Enheten fungerer som følger. I utgangsposisjonen er produktet, som har formen av et sylindrisk glass, plassert på rullene 32 på den øvre transportøren 2 og fingeren 29 settes inn i dets hull. For å overføre produktet til den nedre transportøren 3 slås den hydrauliske sylinderen 11 på og dens stang som er stivt forbundet med stativet 10 trekkes tilbake, mens giret 9 roterer med klokken og roterer akselen 5 i samme retning, som dreier spaken 7 , som resulterer i at overføringsmekanismen sammen med huset 13 og produktet plassert på fingeren 29 gjør en flat-parallell bevegelse, slik at produktet kommer inn i transportøren 3 i horisontal posisjon. Samtidig med rotasjonen av spakene 6 og 7, roterer produktet rundt den vertikale aksen i en vinkel på 180 grader, noe som oppstår på grunn av svingingen av spakene 6 og 7, rotasjonen av girakselen 14, overført til giret 22 og deretter gjennom vinkeltannhjulene 18 og 19 til akselen 17, på hvilken tappen 29 er festet. For at produktet, når det dreies rundt en vertikal akse ved begynnelsen av bevegelsen, ikke skal berøre rullene 32 på den øvre transportøren. 2 og for å sikre et garantert gap mellom dem, når man dreier girakselen 14, roterer et tannhjul montert på akselen 16 22, under den første kompresjonen av fjæren 27, fritt uten å overføre rotasjon til akselen 17 med tappen 29 festet Når produktet heves over transportøren 2, overfører den bevegelige stopper 25, under påvirkning av den komprimerte fjæren 27, kraft til driveren 21, og får derved akselen 16 til å rotere og gjennom koniske tannhjul 18 og 19. 17 med stift 29. Etter at produktet er installert på transportør 3, slås drivverket på (ikke vist i fig. 32) og produktet forlater stift 29 og beveger seg i ønsket retning. Vippeanordningen, frigjort fra produktet, går tilbake til sin opprinnelige posisjon, og den hydrauliske sylinderen 11 slås på dens stang med stativet 10, og dreier giret 9 med akselen 5 mot klokken, som et resultat av at spakene 6 og 7 med kroppen 13; og stift 29 dreies i samme retning. I dette tilfellet roterer akselen 17 med tappen 29 i en vinkel på 180 grader i motsatt retning, utført av fjæren 28 og den bevegelige stopperen 26.

Ris. 33. Utformingen av sveivkoblingsstangmekanismen gjør at glideren blandes med den senkede i løpet av en viss tidsperiode.
hastighet nær konstant.
I fig. Figur 33 viser utformingen av en sveivmekanisme kombinert med et spak-sveivsystem, som lar glideren bevege seg med redusert hastighet nær konstant over en viss tidsperiode. Denne mekanismen inneholder en veivaksel 1, hvis støttetapper 2 er montert i lager på rammen, en to-arms spak 3, svingbart montert på veivtappen til veivakselen 1 og forbundet gjennom akser 6 med en arm med en koblingsstang 4 og en glider 5, og ved den andre armen med en stang 7, installert i sleiden 8, svingende på aksen 9, mens stangen 7 er dreibart forbundet, på grunn av aksen 12, med vippearmen 11, montert på rammen ved hjelp av aksen 10. Når glideren 5 beveger seg nedover, vil vippespaksystemet som består av vippearmen 11, stang 7. Skyveren 8 utfører en ekstra rotasjon av to-armsspaken 3 rundt veivstiften til veivakselen 1 med klokken, noe som fører til at hastigheten på glidebryteren på et visst tidspunkt reduseres, og verdien blir nær konstant. Denne bevegelsesmodusen til glidebryteren er nødvendig når du utfører en rekke teknologiske operasjoner, for eksempel tegning.
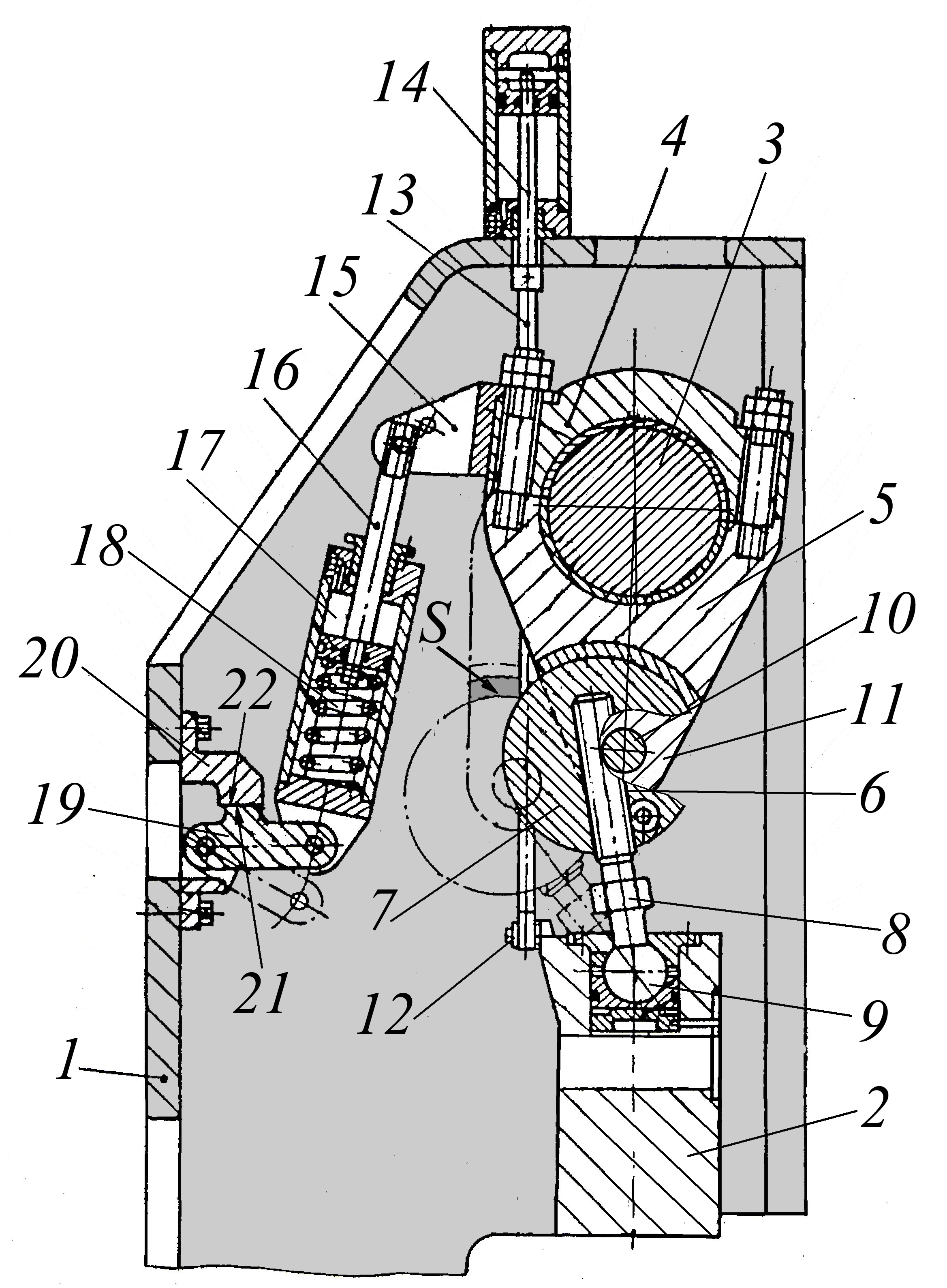
Fig. 34 Utforming av sveiv-vevstangaktuatoren til pressen med en clutchløs aktiveringsanordning
Figur 34 viser utformingen av sveiv-vevstangaktuatoren til pressen med en enhet for clutchfri aktivering, som
laget på grunnlag av en brytende koblingsstang. Den består av en glider 2 installert i føringene til rammen 1, som mottar en frem- og tilbakegående drivkraft fra veivakselen 3 gjennom en sammensatt forbindelsesstang 4, koblet til glideren 2 ved hjelp av et sfærisk hengsel 9, mens forbindelsesstangen 4 inneholder en drivkraft 5 og en drevet 6 albue, sylindriske flater som danner et hengselledd, sistnevnte består av en skive 7 og en justeringsskrue 8, og skiven 7 er laget med aksler 10, plassert i de tilsvarende hullene i øynene 11 til drivverket. del 5 av koblingsstangen 4. I tillegg er akslene 10 plassert eksentrisk i forhold til skivens 7 akse, noe som sikrer tilstedeværelsen av et gap mellom de sylindriske overflatene til drivanordningen 5 og drevne 6 knær på den brytende koblingsstangen 4, som er nødvendig under tomgang av pressens aktiveringsvev-koblingsstangmekanisme. For å sikre at den er garantert i den øvre startposisjonen, selv når den brytende koblingsstangen 4 er i av-posisjon, er glideren 2 koblet til balansestangen 14 via en akse 12 og en stang 13. En brakett 15 er stivt festet til koblingsstangens drivalbue 5, som er dreibart forbundet med stangen 16 på den pneumatiske kontrollsylinderen 17, en clutchløs aktiveringsmekanisme, mens kroppen er dreibart forbundet med en brakett 20, montert på bakveggen av pressen ramme 1, ved hjelp av en vippearm 19. Braketten 20 er utstyrt med et fremspring 22, og vippen 19 er utstyrt med et fremspring 21, som har mulighet for sporadisk interaksjon.
Mekanismen fungerer som følger. Med konstant rotasjon av veivakselen 3, på kommando fra det elektro-pneumatiske automatiseringssystemet, tilføres trykkluft til stanghulrommet til den pneumatiske kontrollsylinderen 17, som et resultat av dette og takket være leddforbindelsen av den pneumatiske sylinderkroppen med vippearmen 19, innbyrdes motsatte bevegelser av dens stang 16 og kroppen, som fører til rotasjon av vippearmen 19 mot klokken og dens fremspring 21 hviler mot fremspringet 22 av braketten 20, og stangen 16 til pneumatikken sylinderen, som komprimerer fjæren 18, virker på braketten 15, som den er dreibart forbundet med, og sikrer derved at drivingen 5 og drevet 6 til koblingsstangen 4 holdes i en lukket stilling (som vist i figur 34). I dette tilfellet overføres bevegelsen fra veivakselen 3 til glideren 2 gjennom en lukket koblingsstang 4. Når tilførselen av trykkluft inn i stanghulrommet til kontrollpneumatisk sylinder 17 stoppes på kommando fra det elektropneumatiske automatiseringssystemet, under påvirkning av den roterende veivakselen 3 og kraften til utjevningsanordningen 14, oppstår koblingsstangens albuer 5 og 6 4 og fjerner deres sylindriske overflater som danner hengslet fra kontakt, noe som fører, på grunn av den eksentriske installasjonen av akslene 10 i forhold til aksen til skiven 7, til dannelsen av et gap S mellom dem. Deretter begynner knærne 5 og 6 på koblingsstangen 4 å gjøre en vippebevegelse i forhold til akslene 10 som forbinder dem, og glideren 2, under påvirkning av kraften fra balanseren 14, med veivakselen 3 konstant roterende, er i den øverste posisjonen. Samtidig, under påvirkning av fjæren 18, beveger og senkes kroppen til den pneumatiske kontrollsylinderen 17 fritt og vippearmen 19 roterer med klokken. Etter at kroppen til den pneumatiske sylinderen 17 når sin laveste posisjon, begynner den å gjøre en flat-parallell bevegelse, dreie i forhold til punktene på hengselforbindelsen med braketten 15 og vippearmen 19, mens den mottar bevegelse fra veivakselen 3 som roterer med en konstant hastighet Med den etterfølgende tilførsel av trykkluft inn i stanghulrommets pneumatiske sylinder 17, gjør glideren 2 et arbeidsslag.
Girspakmekanismer.
Kombinasjonen av spakmekanismer med gir gjør det mulig å lage mekanismer med nye egenskaper som er ukarakteristiske for begge. Oftest brukes slike mekanismer for å oppnå høyden på utgangslenken, men i noen tilfeller kan de gjøre det mulig å oppnå forskjellige bevegelsesbaner for utgangslenken, samt endre størrelsen og hastigheten på dens bevegelse
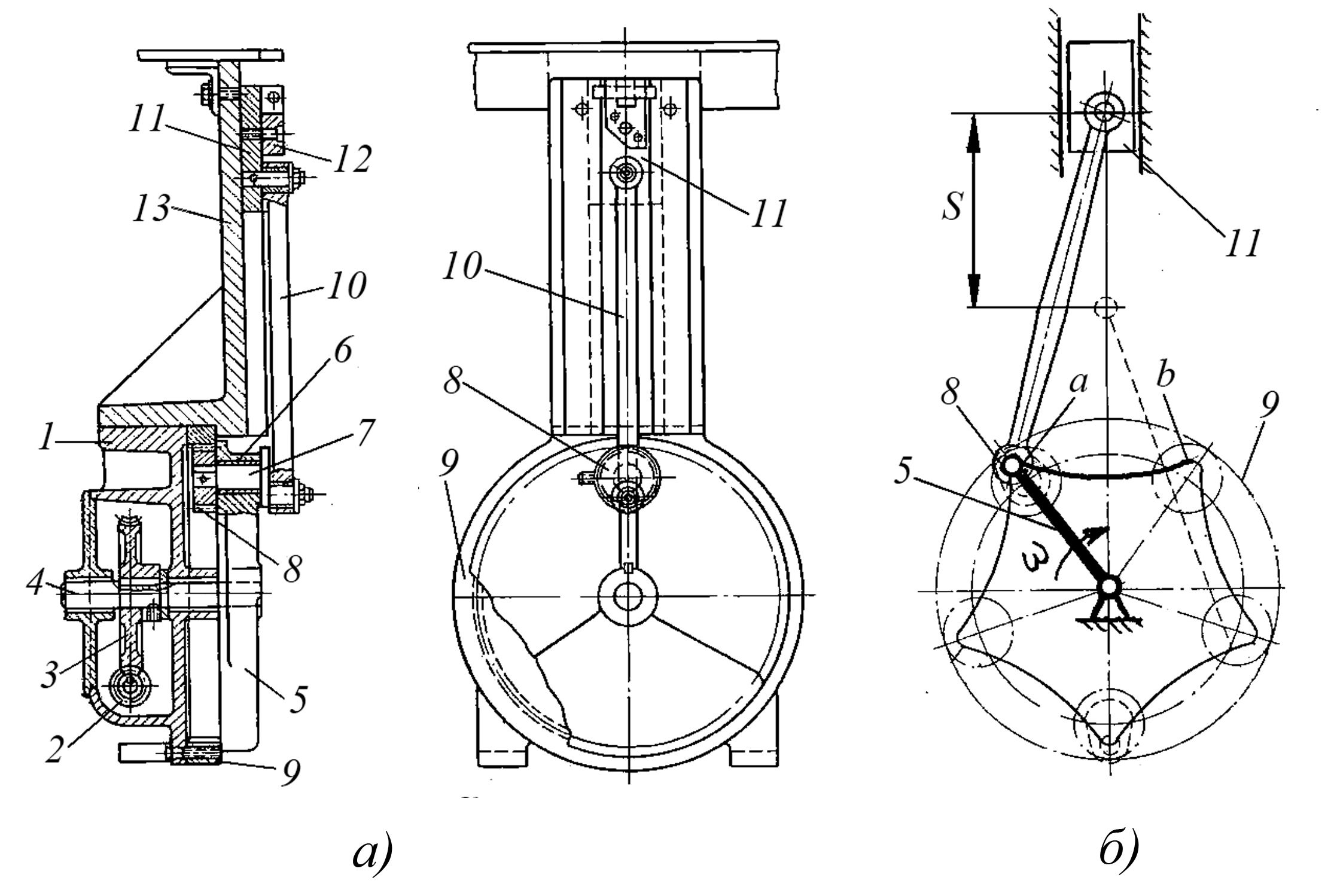
Fig. 35 Utformingen av girspakmekanismen, hvis utgangsledd - glideren i ytterste fremre posisjon gjør at den står
Figur 35 viser utformingen av girspakmekanismen, hvis utgangsledd, glideren, i ytterste fremre posisjon stopper ved en viss rotasjonsvinkel til drivleddet - sveiven. Den består av et hus 1 hvor snekkegiret 2, 3 er plassert, og på dens drevne aksel 4 er det festet en sveiv 5, som er en planetgirbærer, i hvis hull en eksentrisk tapp 7 er installert på glideren lager 6, i den ene ende av hvilket en satellitt 8 er stivt festet, i inngrep med kronhjulet 9 montert i huset 1, og den andre enden er dreibart forbundet med forbindelsesstangen 10, som gir en frem- og tilbakegående bevegelse til glideren 11 som beveger seg i føringene 12 til rammen 13. I dette tilfellet er eksentrisitetsverdien til tappen 7 mye mindre enn radiusen til hovedsirkelen til satellitten 8. Under en pause i driften av enheten beveger den eksentriske tappen 7 seg langs en bue hvis radius er tilnærmet lik avstanden mellom aksene for forbindelsen av koblingsstangen 10 med sveiven 5 og glideren 11, som et resultat av at den foretar en vippebevegelse uten å gi bevegelse til glideren (se fig. 35b). Med slik kinematikk av anordningen er bevegelsesbanen til den eksentriske tappen 7 en lukket kurve med fem fremspring, hvor pausen til glideren 11 i ytterposisjonen er uttrykt av seksjonen a–b på diagrammet. Pausen til glideren 11 oppstår på grunn av det faktum at lengden på forbindelsesstangen 10 er lik radiusen til buen nært i form av baneseksjonen a-b sveiv 5.
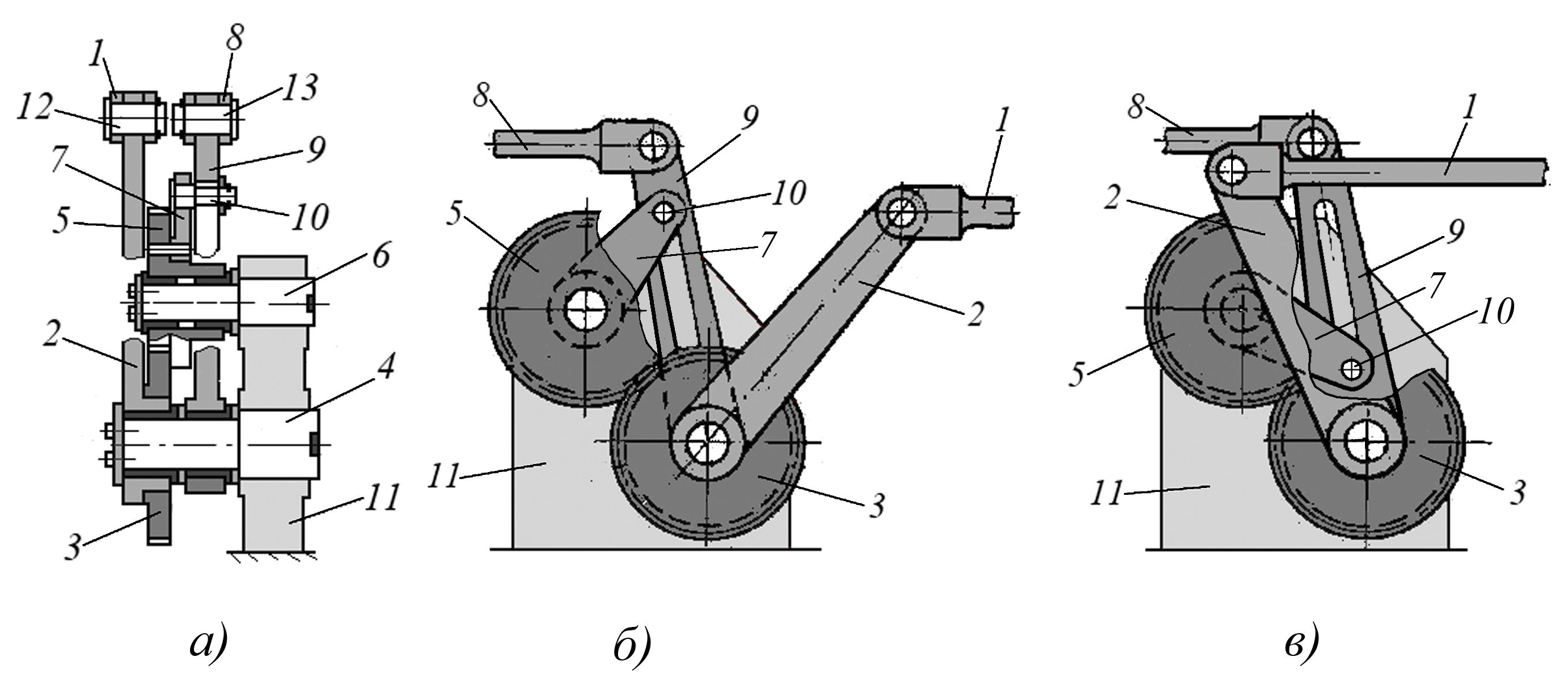
Fig. 36 Utformingen av girspakmekanismen gjør det mulig å oppnå dobbelt så mange frem- og tilbakegående bevegelser av det drevne leddet i forhold til det som driver.
Figur 36 viser utformingen av girspakmekanismen, som gjør det mulig å oppnå dobbelt så mange frem- og tilbakegående bevegelser av det drevne leddet i forhold til det drivende. Det ledende elementet i dette drivverket er stangen 1, som gir en vippebevegelse til spaken 2, koblet til gir 3 og fritt roterende med dette hjulet på akse 4. Tannhjul 3 gir rotasjon til hjul 5, forbundet med spak 7 montert på akse 6. Pinnen 10 spaken 7, som beveger seg i sporet til sleiden 9, gir bevegelse til stangen 8. Aksene 4 og 6 er montert i et stasjonært hus 11 montert på rammen. I fig. 36b,c er stang 1 vist i ytterste høyre og venstre posisjon, som tilsvarer begynnelsen og midten av dens bevegelsessyklus. Sleiden 9 inntar i begge tilfeller samme posisjon, siden den fullfører en hel syklus og går tilbake til sin opprinnelige posisjon. Spaken 2 beveges av stangen 1 fra posisjonen vist i fig. 36a til venstre, som et resultat av dette gir 3 gjør en viss del av omdreiningen. Gir 5, som er i inngrep med hjul 3, gjør samme rotasjon i motsatt retning. Spak 7 koblet til hjul 5 roterer med den, og finger 10 beveger seg ned langs sporet på sleiden 9. Før finger 10 krysser midten av akse 6, dreier sleiden til høyre og når sin ytterstilling (se fig. 36c). . Ved ytterligere bevegelse av stangen 1 faller fingeren 10 under midten av aksen 6 og beveger sleiden 9 i motsatt retning, dvs. til venstre. I det øyeblikk stangen 1 når den ytterste venstre posisjon, inntar også sleiden 9 sin ytterste venstre posisjon, og gjør et dobbelt bevegelse mens stangen 1 bare gjør en foroverbevegelse. I løpet av tiden stangen 1 gjør det omvendte slaget, gjør leddet 9 et nytt dobbeltslag.
Fig. 37 Design av en girspakmekanisme som lar deg automatisk endre vinkelen på periodisk rotasjon av den drevne akselen.
Figur 37 viser utformingen av en girspakmekanisme som lar deg automatisk endre vinkelen for periodisk rotasjon av den drevne akselen. Den inneholder en drevet aksel 1, på hvilken et tannhjul 2 og et skrallehjul 3 er stivt festet, samt en vippearm 4 montert på akselen 1 med mulighet for rotasjon, mens tannhjulet 2 er i konstant inngrep med tannhjulet. 5, som er dreibart montert ved hjelp av en akse 12 på vippearmen 4 og bærer en sveiv 6, forbundet via en akse 13 til en stang 7, som igjen er svingbart forbundet via en akse 10 til drivstangen 8. I I tillegg er en fjærbelastet pal 11 installert på vippearmen 4 i kontakt med sperrehjulet 3, og en akse 10 er installert i glideren 9, som kan bevege seg langs det langsgående sporet til vippearmen 4. I fig. 37a, glideren 9 er vist i sin laveste posisjon
Mekanismen fungerer som følger. Stangen 8, som utfører en frem- og tilbakegående bevegelse, gir vippearmen 4 en vippebevegelse. Når stangen 8 beveger seg fremover, griper sperrehaken 11 inn i sperrehjulet 3, på grunn av hvilket den drevne akselen 1 sammen med tannhjulet 2 , gjør en vippebevegelse sammen med vippearmen 4. Når stangen beveger seg i revers 8, glir pal 11 langs tennene på sperrehjulet og den drevne akselen 1, sammen med tannhjulet 2, forblir stasjonært. Under omvendt bevegelse av vippearmen 4 roterer tannhjulet 5, som ruller langs det stasjonære tannhjulet 2 på dette tidspunktet, om aksen 12 og dreier sveiven 6, som, hengslet til stangen 7, gir en flat, parallell bevegelse til den, og sistnevnte beveger samtidig glideren 9 i sporet til vippearmen 4 som et resultat av at avstanden fra aksen 10 til akselen 1 øker. Siden girforholdet mellom gir 2 og gir 5 i dette tilfellet er valgt lik to, roterer gir 5 med sveiv 6 i en vinkel på 180 grader, og glideren 9 inntar den øverste posisjonen i sporet til vippe 4 (se fig. 37b) ). Derfor vil rotasjonsvinkelen til vippearmen 4 og følgelig den drevne akselen 1 være mindre under det neste foroverslaget av stangen 8 på grunn av økningen i svingeradius. Når stangen 8 beveger seg i revers og vippearmen 4 dreier, vil tannhjulet 5, som ruller langs det faste tannhjulet 2, igjen dreie i en vinkel på 180 grader, skyveren 9 vil ta sin opprinnelige nedre posisjon som vist i fig. 37a , hvoretter driftssyklusen til mekanismen vil gjentas.
 Fig. 38 Utforming av girspakmekanisme for lineær bevegelse.
Fig. 38 Utforming av girspakmekanisme for lineær bevegelse.
Beregninger av mekanismer (kinematisk, energi, kraft, styrke), så vel som deres viktigste strukturelle elementer (eksentriske og veivaksler, koblingsstenger, glidere, spaker, hengselledd) er gitt i arbeidet
Til tross for endringene i maskinteknikk de siste 20–25 årene, inkludert i utformingen av teknologisk utstyr, først og fremst relatert til drivtypen og dets kontrollsystem, fortsetter spakmekanismer å bli mye brukt på grunn av deres unike fordeler. Disse fordelene ligger i det faktum at spakmekanismer tillater, ved høye driftshastigheter, å oppnå en gitt bevegelsesbane for utgangskoblingen til aktuatoren, så vel som i nærvær av pulserende teknologiske belastninger i løpet av en viss periode av utstyrets driftssyklus , ved å bruke spesielt egenskapene til sveivmekanismen for å minimere den nødvendige kraften. I tillegg gjør spakmekanismer det mulig, ved hjelp av enkle strukturelle elementer, å øke antall slag på utgangsleddet, endre størrelsen på utgangsleddets slag, uten å øke bevegelsen til drivverket, og også løse en rekke andre problemer. Samtidig kan verken en hydraulisk eller programmerbar elektromekanisk drift konkurrere med spakmekanismer i denne forbindelse, noe som bestemmer et ganske bredt spekter av bruksområder for spakmekanismer.
LITTERATUR.
1. Ignatiev N.P. Fundamentals of design Azov 2011.
2. Ignatiev N.P. Design av mekanismer Azov 2015.
Artikkelen ble skrevet basert på informasjon fra de relevante delene av forfatterens arbeid "Grunnleggende design" utgitt i 2011 og forfatterens arbeid "Mekanismedesign", utgitt i 2015.
I referanse- og metodehåndboken "Mekanismedesign" I tillegg til eksempler på utformingen av spakmekanismer, inneholder den:
– designeksempler og anbefalinger for bruk av kammekanismer, intermitterende mekanismer og kombinerte mekanismer,
– eksempler på design og anbefalinger for bruk av hovedtyper av deler av de ovennevnte mekanismene: veivaksler, koblingsstenger, glidere, spaker og vippearmer, kam og deres hengselledd,
– anbefalinger for valg av type mekanismedrift og eksempler på implementeringen,
– beregninger av mekanismer,
– et eksempel på å konstruere et syklogram over driften av en kammaskin,
– metodikk for utforming av mekanismer,
– anbefalinger for å tildele nøyaktighetskrav til mekanismer og deres typiske deler,
– et eksempel på utforming av en kompleks originalmekanisme
For å kjøpe den fullstendige versjonen av artikkelen, legg den til i handlekurven,
Kostnaden for den fullstendige versjonen av artikkelen er 80 rubler.
Spakmekanismer med lavere kinematiske par har blitt utbredt i moderne maskinteknikk. Fordelene med slike mekanismer inkluderer: høy produksjonsevne, muligheten for å bruke rullelagre i kinematiske forbindelser, evnen til å overføre store krefter med liten slitasje på kontaktflater, pålitelighet og holdbarhet i drift. Disse mekanismene krever ikke enheter som sikrer konstant lukking av kinematiske par, i motsetning til kammekanismer.
Mekanismer skapes ut fra betingelsene for å møte kravene til den teknologiske prosessen. Mekanismedesign er en kompleks oppgave, hvis løsning kan deles inn i to stadier. Første etappe syntese av mekanismer består i å velge et kinematisk diagram som gir den nødvendige typen og bevegelsesloven til utgangslenken og de generelle betingelsene for mekanismenes funksjonalitet. I andre trinn Strukturelle former for lenker og kinematiske par utvikles for å sikre styrken og påliteligheten til mekanismen. Vårt kurs dekker kun Første skritt syntese.
Mekanismens design velges vanligvis basert på erfaring i forhold til gitte spesifikke forhold. Bestem deretter synteseparametere, dvs. lengder på lenker og koordinater av punkter som gir de nødvendige banene, etc., samt ytterligere syntesebetingelser.
Ytterligere syntesebetingelser inkluderer betingelse for eksistensen av en sveiv, og kraftoverføringstilstand.
Tving overføringstilstand
Kvaliteten på kraftoverføring i maskiner er vanligvis preget av trykkvinkelen λ, bestemt uten å ta hensyn til tyngdekreftene til leddene og treghetskreftene.
Trykkvinkel λ er en spiss vinkel mellom vektoren til kraften som virker på det drevne leddet fra siden av det tilstøtende bevegelige leddet og vektoren for den absolutte hastigheten til punktet for påføring av denne kraften.
Bevegelsesoverføringsvinkel γ utfyller trykkvinkelen opp til 90°:
γ = 90° – λ .
På stadiet av metrisk syntese er de maksimalt tillatte vinklene for trykk [λ max ] og overføring av bevegelse [γ min ] begrenset, som regel, med dem:
[λ max ] ≤ 30° og [γ min ] ≥ 60° for en glidende drevet ledd, og
[λ max ] ≤ 40°...45° og [γ min ] ≥ 50°...45° – for et roterende drevet ledd.
La oss vurdere betingelsen for overføring av krefter i en firestangs leddledd, som er i likevekt under påvirkning av momentene til drivkraften. M D og motstandsmoment M C (fig. 3.1). Trykkvinkelen λ karakteriserer forholdet mellom den nyttige motstandskraften F 23 cos λ overvinne motstandsmomentet M Med, og kraft F 23, lik
F 23 = M MED /( l Sol∙ cos λ).
Fig.3.1. Trykkvinkel λ i en firestangs leddledd
Etter hvert som trykkvinkelen øker, må det påføres mer kraft F 23 for å overvinne det samme motstandsmomentet. Dette fører til en økning i reaksjoner i kinematiske par og en reduksjon i effektiviteten til mekanismen.
Når mekanismen beveger seg, endres trykkvinkelen. Denne vinkelen i et fire-stangs hengsel når ekstreme verdier i posisjoner der sveiven OA plassert på samme rette linje med stativet OS(Fig. 3.2).
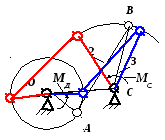
Fig.3.2. Posisjonene til mekanismen som trykkvinklene når
ekstreme verdier
I en sveiv-skyvemekanisme får trykkvinkelen ekstreme verdier i posisjonene vist i fig. 3.3 ved sveiv OA vinkelrett på glidebryterens bane I.

Ris. 3.3. Posisjonene til mekanismen der trykket vinkler
har ekstreme verdier.
Nedenfor tar vi for oss de vanligste problemene med kinematisk syntese av mekanismer i kursprosjekter.
Syntese av en firestangs leddledd basert på endringskoeffisienten i gjennomsnittshastighet og to ytterposisjoner av vippearmen
Koeffisient k endring i gjennomsnittshastigheten til det drevne leddet er lik k = V C 2 – 1 / V C 1 – 2 ,
Hvor V C 1 – 2 − gjennomsnittlig lineær hastighet til et punkt MED(fig. 3.4) under arbeidsslaget, V C 2 – 1 − det samme for omvendt slag.
La oss akseptere k> 1, siden ved utforming av mekanismer, som regel, tas tiden for å gå tilbake til utgangsposisjonen til å være mindre enn arbeidsslagtiden, derfor k > 1.
Det er ikke vanskelig å bevise det k= (180° + θ) /(180° – θ).
Hvor er θ = 180° ( k −1) /(k +1),
hvor q − vinkel mellom koblingsstangposisjoner B.C. ved begynnelsen og slutten av arbeidsslaget.
La oss introdusere følgende notasjon:
l 1 – sveivlengde AB,(se fig. 3.4); l 2 – vevstagslengde Sol;
l 3 – vippelengde CD; l 4 – avstand mellom støttene (standlengde END).

Ris. 3.4. Diagram av mekanismen i posisjoner som tilsvarer verdiene til de gitte vinklene ψ
Gitt vinklene ψ 1 og ψ 2, samt koeffisienten k, la oss skildre vippearmens to ekstreme posisjoner CD(Fig. 3.5).
Poeng MED 1 og MED La oss koble 2 med en rett linje. La oss beregne vinkelen q mellom koblingsstangens ekstreme posisjoner Sol. På punktet MED 2 konstruer vinkelen γ = 90° −
θ, og fra punktet MED 1 senk vinkelrett på linjen MED 1 MED 2 til den skjærer en linje trukket fra punktet MED 2 og danner vinkelen y. La oss betegne skjæringspunktet mellom disse linjene OM. Tydeligvis i en rettvinklet trekant OMED 1 MED 2 hjørne MED 1 OS 2 = θ. Med tre poeng O, MED 1 og MED 2 beskriver vi en sirkel. Innskrevet vinkel med toppunktet i punktet OM hviler på en bue  og er lik vinkelen θ, samt alle innskrevne vinkler basert på samme bue. La oss velge en sirkel med sentrum i punktet OM vilkårlig poeng EN og koble den med rette segmenter med punkter MED 1 og MED 2. Som et resultat, plasserer sveivstøtten på punktet EN, får vi et diagram over en firestangsmekanisme i ekstreme posisjoner (se fig. 3.5).
og er lik vinkelen θ, samt alle innskrevne vinkler basert på samme bue. La oss velge en sirkel med sentrum i punktet OM vilkårlig poeng EN og koble den med rette segmenter med punkter MED 1 og MED 2. Som et resultat, plasserer sveivstøtten på punktet EN, får vi et diagram over en firestangsmekanisme i ekstreme posisjoner (se fig. 3.5).

Ris. 3.5. Syntese av et firestavs hengsel i henhold til koeffisienten k
endringer i gjennomsnittshastighet og to ekstreme posisjoner av vippen
Av figuren følger det AC 1 = I 1 MED 1 −AB 1 = l 2 − l 1 ; AC 2 = I 2 MED 2 −AB 2 = l 2 + l 1 .
Hvor l 1 = 0,5 (AC 2 −AC 1) μ l / 2; l 2 = AC 2 − l 1 .
Stativlengde END = l 4 vil bli bestemt av punktets posisjon EN.
Siden posisjonen til punktet EN ble valgt vilkårlig, er det en multivariat løsning på problemet. Dette lar deg introdusere ytterligere forhold, for eksempel tilstanden for kraftoverføring, tilstedeværelsen eller fraværet av eksentrisitet av plasseringen av støttene i forhold til koordinataksen.
Syntese av vippemekanismen iht koeffisientk Endringer
gjennomsnittshastigheten på scenene
Gitt: koeffisient k endringer i hastighet og to ekstreme posisjoner av punktet I bak scenen Sol.
La oss vurdere vippemekanismen i to ytterposisjoner (fig. 3.6).

Ris. 3.6. Syntese av vippemekanismen
Vinkel mellom sveivposisjon OA 2 og fortsettelse av sveiven i posisjon OA 1 er lik θ = 180° ( k −1) /(k+1). Vinkler I 1 C B 2 og q vil være lik hverandre, som vinkler med innbyrdes vinkelrette sider.
På en rett linje I 1 I 2 konstruer en likebenet trekant med en vinkel i toppunktet MED, lik vinkelen q. Velg et punkt på en rett linje som deler vinkelen q i to i et vilkårlig punkt OM, som sveiven roterer rundt OA. Slipper fra poenget OM vinkelrett på linjen I 1 MED(eller I 2 MED), finn lengden på sveiven OA. Den resulterende vippemekanismen vil tilfredsstille de spesifiserte betingelsene. Konstruksjonen av vippemekanismen i henhold til de gitte forholdene skjer som følger. Poeng I 1 og I 2, hvis posisjon er gitt, forbinder vi med en rett linje.
Syntese av en sveiv-skyvemekanisme
La oss godta følgende konvensjoner (fig. 3.7):
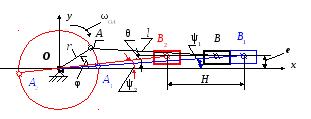
Ris. 3.7. Diagram av sveiv-skyvemekanismen
r– sveivlengde OA;N– glidebryterens slag; l– lengde på vevstag AB;
e– disaksial, dvs. punktbaneforskyvning I glidebryteren i forhold til aksen Åh ;
L = l/ r– relativ lengde på koblingsstangen;
ν = e/r– relativ disaksial;
h = H/ r– relativ slag av glidebryteren ;
λ max – maksimal trykkvinkel (se fig. 3.3);
k − endringskoeffisient i gliderens gjennomsnittlige hastighet (se § 3.1)
ψ 1 og ψ 2 – spisse vinkler dannet av sveiven OA med retning Åh i ytterposisjonene til glidebryteren: φ 1 =  I 1
Åh, φ 2 = I 2
Åh
;
I 1
Åh, φ 2 = I 2
Åh
;
θ = ψ 2 – ψ 1– spiss vinkel mellom koblingsstengene i sleidens ytterposisjoner.
Oppgave 1. Gitt: Ikke, L = l/ r.
Finne: r; l; ׀λ maks ׀.
Veiv lengde OA: r = H / h. Vevstanglengde AB: l = L r.
Den største verdien av trykkvinkelen ׀ λ max ׀ = bue sin [(1 + ν) / L] .
Oppgave 2. Gitt: N,k, L= l/ r.
Finne: r; l; e; ׀ λ maks ׀.
Akutt vinkel mellom koblingsstengene i gliderens ekstreme posisjoner
θ = 180 0 ∙( k–1)/(k+1).
Vi finner det relative slaget til glidebryteren fra uttrykket
h = {2∙} 0,5 .
Vi finner det relative disaksiale fra uttrykket
ν = [( h –2)∙(L 2 –1)] 0,5 .
Veiv lengde r = H/ h; koblingsstanglengde l = L r; disaksial e =ν r.
Den største verdien av trykkvinkelen λ max = bue sin [(1 + ν) / L].