Системот на сили се нарекува избалансиран, ако под влијание на овој систем телото останува во мирување.
Услови за рамнотежа:
Првиот услов за рамнотежа на круто тело:
За круто тело да биде во рамнотежа, потребно е збирот на надворешните сили што се применуваат на телото да биде еднаков на нула.
Вториот услов за рамнотежа на круто тело:
Кога круто тело е во рамнотежа, збирот на моментите на сите надворешни сили што дејствуваат на него во однос на која било оска е еднаков на нула.
Општ услов за рамнотежа на круто тело:
За круто тело да биде во рамнотежа, збирот на надворешните сили и збирот на моментите на силите што делуваат на телото мора да биде нула. Почетната брзина на центарот на масата и аголната брзина на ротација на телото исто така мора да бидат еднакви на нула.
Теорема.Три сили балансираат на круто тело само ако сите лежат во иста рамнина.
11. Систем на рамна сила– тоа се сили сместени во една рамнина.
Три форми на равенки за рамнотежа за рамнински систем:
Центарот на гравитација на телото.
Центар на гравитацијаТело со конечни димензии се нарекува точка за која збирот на моментите на гравитација на сите честички на телото е еднаков на нула. Во овој момент се применува силата на гравитација на телото. Центарот на гравитација на телото (или системот на сили) обично се совпаѓа со центарот на масата на телото (или системот на сили).
Центар на гравитација на рамна фигура:
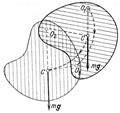
Практичен метод за пронаоѓање на центарот на масата на рамна фигура: закачете го телото во гравитационо поле за да може слободно да се ротира околу точката на суспензија О1 . Во рамнотежа центарот на масата СО е на иста вертикала со точката на потпирање (под неа), бидејќи е еднаква на нула
момент на гравитација, кој може да се смета дека се применува во центарот на масата. Со менување на точката на потпирање наоѓаме друга права линија на ист начин O 2 C , поминувајќи низ центарот на масата. Позицијата на центарот на масата е дадена со точката на нивното вкрстување.
Центар на брзина на маса:
Импулсот на системот на честички е еднаков на производот од масата на целиот систем М= Σmi на брзината на неговиот центар на маса В :
![]()
Центарот на маса го карактеризира движењето на системот како целина.
15. Лизгачко триење– триење при релативно движење на телата кои се во контакт.
Статично триење– триење во отсуство на релативно движење на контактните тела.
Лизгачка сила на триење Ftr помеѓу површините на контактните тела за време на нивното релативно движење зависи од силата на нормалната реакција Н , или од силата на нормалниот притисок Pn , и Ftr=kN или Ftr=kPn , каде што к – коефициент на триење на лизгање , во зависност од истите фактори како коефициентот на статичко триење k0 , како и на брзината на релативното движење на телата што контактираат.
16. Триење на тркалање- Ова е превртување на едно тело над друго. Силата на триење на лизгање не зависи од големината на површините за триење, туку само од квалитетот на површините на телата за триење и од силата што ги намалува површините на триење и е насочена нормално на нив. F=kN, Каде Ф- сила на триење, Н– големината на нормалната реакција и k – коефициент на триење на лизгање.
17. Рамнотежа на телата во присуство на триење- ова е максималната сила на адхезија пропорционална на нормалниот притисок на телото на рамнината.
Аголот помеѓу вкупната реакција, врз основа на најголемата сила на триење за дадена нормална реакција, и насоката на нормалната реакција се вика агол на триење.
Конус со врв во точката на нанесување на нормалната реакција на груба површина, чија генератрикс прави агол на триење со оваа нормална реакција, се нарекува конус на триење.
Динамика.
1. ВО динамикасе разгледува влијанието на интеракциите меѓу телата врз нивното механичко движење.
Тежина- ова е сликарство карактеристично за материјална точка. Масата е константна. Масата е придавка (адитив)
Сила -ова е вектор кој целосно ја карактеризира интеракцијата на материјална точка на неа со други материјални точки.
Материјална точка– тело чии димензии и форма се неважни во движењето што се разгледува.
Систем на материјалповикани точки збир на материјални точки во интеракција една со друга.
Њутновиот 1 закон:која било материјална точка одржува состојба на мирување или рамномерно праволиниско движење додека надворешните влијанија не ја променат оваа состојба.
Вториот Њутнов закон:забрзувањето добиено од материјална точка во инерцијална референтна рамка е директно пропорционално на силата што дејствува на точката, обратно пропорционално на масата на точката и се совпаѓа во насока со силата: a=F/m
Третиот Њутнов закон:силите на интеракција помеѓу две материјални точки во инерцијалната референтна рамка се еднакви по големина и насочени во спротивни насоки : Фик= - Фки
Дали знаеше, Која е лажноста на концептот „физички вакуум“?
Физички вакуум - концептот на релативистичка квантна физика, под кој се подразбира најниската (земјена) енергетска состојба на квантизирано поле, кое има нула импулс, аголен моментум и други квантни броеви. Релативистичките теоретичари го нарекуваат физички вакуум простор целосно лишен од материја, исполнет со немерливо, и затоа само имагинарно поле. Таквата состојба, според релативистите, не е апсолутна празнина, туку простор исполнет со некои фантомски (виртуелни) честички. Релативистичката квантна теорија на поле вели дека, во согласност со Хајзенберговиот принцип на несигурност, виртуелен, односно привидни (на кого?), честичките постојано се раѓаат и исчезнуваат во физичкиот вакуум: се случуваат таканаречените осцилации на полето со нулта точка. Виртуелните честички на физичкиот вакуум, а со тоа и самиот, по дефиниција, немаат референтен систем, бидејќи во спротивно Ајнштајновиот принцип на релативност, на кој се заснова теоријата на релативност, би бил нарушен (т.е. апсолутен систем за мерење со референца на честичките на физичкиот вакуум би станало возможно, што пак јасно би го побило принципот на релативност на кој се заснова SRT). Така, физичкиот вакуум и неговите честички не се елементи на физичкиот свет, туку само елементи на теоријата на релативноста, кои не постојат во реалниот свет, туку само во релативистички формули, притоа го нарушуваат принципот на каузалност (тие се појавуваат и исчезнуваат без причина), принципот на објективност (виртуелните честички може да се разгледуваат, во зависност од желбата на теоретичарот, или постоечки или непостоечки), принципот на фактичка мерливост (не се набљудува, немаат свој ISO).
Кога еден или друг физичар го користи концептот на „физички вакуум“, тој или не ја разбира апсурдноста на овој термин, или е неискрен, бидејќи е скриен или отворен приврзаник на релативистичката идеологија.
Најлесен начин да се разбере апсурдноста на овој концепт е да се свртиме кон потеклото на неговото појавување. Роден е од Пол Дирак во 1930-тите, кога стана јасно дека негирањето на етерот во неговата чиста форма, како што беше направено од голем математичар, но просечен физичар, веќе не е можно. Има премногу факти кои се во спротивност со ова.
За да го одбрани релативизмот, Пол Дирак го воведе афизичкиот и нелогичен концепт на негативна енергија, а потоа и постоењето на „море“ од две енергии кои се компензираат една со друга во вакуум - позитивно и негативно, како и „море“ од честички кои ја компензираат секоја друго - виртуелни (односно, привидни) електрони и позитрони во вакуум.
Во статиката, како и во кинематиката (точка 51), круто тело е систем на материјални точки непроменливо поврзани едни со други. Така, овој систем е апсолутно цврсто тело, чии точки остануваат на постојани растојанија една од друга, без оглед на силите што дејствуваат на овие точки и без оглед на движењето на телото.
Вака дефинираното тело е секако идеализација. Пред сè, физиката нè учи дека цврстите тела се состојат од молекули, кои самите имаат многу сложена структура и можат да бидат во широк спектар на скриени движења. Токму за молекулите земени во нивните просечни позиции можеме да кажеме дека остануваат, со висок степен на приближување, на истото
исти растојанија едни од други. Така, овде можеме да ги гледаме молекулите во нивните просечни позиции само како материјални точки. Но, тоа не е сè; дури и ако ги занемариме скриените молекуларни движења и внимаваме само на видливите движења на честичките, тогаш и тогаш сите природни тела ја менуваат својата форма под влијание на силите што се применуваат врз нив; внатрешните сили што дејствуваат помеѓу честичките од истото тело зависат, како што знаеме (точка 109), од овие деформации. Меѓутоа, бидејќи деформациите на телата наречени „цврсти“ во физиката се многу мали, тие може да се занемарат како прво приближување, освен ако силите што се применуваат на телата се премногу големи и освен ако не ги проучуваме внатрешните сили. Одредувањето на внатрешните сили и видливите деформации што се случуваат во цврстите тела е тешка задача која повеќе не се однесува на статиката, туку на теоријата на еластичност. Теоријата што ќе ја претставиме е применлива за цврсти физички тела со поголема точност, колку тие се поблиску до апсолутно цврсто тело.
Од логичка гледна точка, геометриската статика на круто тело треба да се смета како гранична теорија. Тој поставува одреден број општи закони применливи за сите цврсти материи, без оглед на нивната молекуларна структура и нивните еластични својства, сè додека деформациите може да се сметаат за бесконечно мали. Меѓутоа, вака конструираната теорија е нецелосна теорија на рамнотежа, бидејќи систематски ги остава настрана еластичните својства, чие вклучување во некои случаи станува апсолутно неопходно. Во овие случаи, методите на геометриска статика се покажуваат како недоволни за да се решат сите прашања што може да ни ги постави проблемот со рамнотежата. Некои од овие прашања може да испаднат дури и контрадикторни ако ја задржиме хипотезата за апсолутна непроменливост на цврсто тело.
Самата состојба на недеформабилност не е доволна за да се оправда теоријата за рамнотежа на цврсти материи;
на ова мора да се додаде, како додаток на дефиницијата за круто тело, следниот механички постулат:
Постулат. - Без да менувате ништо во условите на рамнотежа на круто тело, можете да додадете или отфрлите две еднакви и директно спротивни сили што се применуваат на две негови точки.
Овој постулат би можел да се изведе од општ принцип познат како принцип на виртуелни движења, но засега нема да го правиме тоа. Споменатиот принцип ќе го воспоставиме во едно од следните поглавја како основа на аналитичката статика. Исто така, би било бескорисно да се воведе овој постулат ако ги прифатиме основните закони на динамиката како што ги изложивме во претходниот дел од курсот, бидејќи постулатот за кој станува збор, како што ќе видиме подоцна, е едноставен посебен случај на една општа теорема за динамика на круто тело. Ако го воведеме овде, тоа го правиме со цел да го зачуваме карактерот на независна дисциплина зад статиката. Овој постулат ќе го разгледаме, од гледна точка на физиката, како директна последица на искуството; од гледна точка на теоретската механика, ќе го сметаме како додаток на дефиницијата за цврсто тело усвоена во статиката, притоа добивајќи ја придобивката што сме ослободени од воведувањето на молекуларната хипотеза.
Како што веќе беше забележано во теоријата на вектори (точка 28), овој основен постулат како последица го повлекува следниот предлог:
Без да се нарушат условите за рамнотежа на круто тело, може да се премести точката на примена на сила во произволна точка на неговата линија на дејствување, сè додека оваа нова точка е поврзана со телото.
Се подразбира дека оваа реченица зборува само за состојбата на рамнотежа на телото, а не за оние дејства што различни точки на телото ги вршат една врз друга, бидејќи овие внатрешни дејства, се разбира, ќе се променат кога точката на примена на наведената сила
операцијата може, на пример, да се изврши кога на некои потпори се поставува круто тело, но во никој случај не може да се каже дека преносот на сила во овој случај нема да ги промени реакциите на потпорите. Затоа, би било голема грешка да се примени принципот на пренос на сила при одредување на реакциите на потпорите, пренесувајќи, на пример, една или друга од применетите сили на потпорната точка. Единствените услови што можат легитимно да се применат во овој случај се општите услови на рамнотежа, бидејќи вторите се секогаш неопходни услови.
185. Намалување на силите што се применуваат на круто тело (статичка гледна точка).
Штотуку видовме дека е можно, без да се наруши рамнотежата на круто тело, да се извршат следните операции на силите што се применуваат на точките на телото:
1°. Дополнување или проширување на силите применети во една точка.
2°. Собирање или одземање на две еднакви и директно спротивни сили.
3°. Пренесување на сила на произволна точка во неговата линија на дејствување.
Овие операции, како што беше утврдено во теоријата на вектори (точка 29), се токму оние елементарни операции кои овозможуваат да се донесат два еквивалентни системи на вектори еден до друг. Од ова ја добиваме следната теорема:
Без да се наруши рамнотежата на круто тело, можно е да се замени кој било систем на сили што се применуваат на телото со друг систем на сили, кој е систем на вектори еквивалентен на првиот.
Ваквите два системи на сили се нарекуваат еквивалентни.
Затоа, задачата да се донесе систем на сили применети на круто тело се совпаѓа со задачата да се донесе систем на вектори, така што можеме да ги донесеме следните заклучоци:
1°. Намалување на две сили. Системот на сили кои се применуваат на круто тело може да се даде како
нерамнотежа, само на две сили, од кои едната се применува на произволно избрана точка на телото (точка 26).
2°. Донесување на сила и на пар. Системот на сили што се применува на цврсто тело може да се намали, без да се наруши рамнотежата, на една сила применета во произволна точка О од телото и на еден пар. Силата е резултатот R на сите сили на системот пренесени во точката O (главниот вектор), а моментот на парот е еднаков на главниот момент O на системот на сили во однос на истата точка (точка 24).
За да може системот на сили да се сведе на една резултантна R, потребно е и доволно за произволно земен центар на редукција O геометриската сума R да се разликува од нула, а добиениот момент G (ако не е нула) е нормална на R. Резултатот е насочен во овој случај по централната оска на системот.
За да може системот да се сведе на еден пар, потребно е и доволно главниот вектор R да биде еднаков на нула, а главниот момент O да се разликува од нула. Во овој случај, главниот момент на системот е ист за секоја точка во просторот.
Конечно, ако векторите R и G се обајцата нула, тогаш системот е еквивалентен на нула и телото ќе биде во рамнотежа. Овој случај ќе го разгледаме во следниот пасус.
Сили во авион. - Кога сите сили дејствуваат во една рамнина, а геометрискиот збир на нивниот R не е еднаков на нула, добиениот момент G (како и моментот на секоја сила) е нормален на R. Следствено, овие сили се сведуваат на една резултантна R се применува во точка на централната оска (која очигледно лежи во рамнината на дејствување на силите). Ако R е еднаков на нула, тогаш системот се намалува на еден пар, а ако, дополнително, G е еднаков на нула, тогаш системот е во рамнотежа.
Корисно е да се забележи дека секој рамнински систем на сили секогаш може да се сведе на две сили, прид. изразено во две дадени точки А и рамнина,
Всушност, секоја сила t применета во точката O, која лежи надвор од правата AB, се распаѓа, во насоките OA и OB, на две компоненти кои можат да се пренесат на точките A и B. Ако точката O на примената на сила лежи на AB, а линијата дејството на силата минува низ А, тогаш може да се пренесе точката на примена на силата; ако линијата на дејство на силата не поминува низ А, тогаш точката на примена на силата може да се пренесе по линијата на дејство надвор од линијата AB, што води до првиот случај.
Паралелни сили. - Ако силите се паралелни, а нивната геометриска сума R не е еднаква на нула, тогаш добиениот момент G е нормален на R и, според тоа, овие сили се сведуваат на една резултантна R применета во точка на централната оска (паралелно кон општата насока на силите). Ако R е еднаков на нула, тогаш системот се сведува на еден пар или е во рамнотежа (кога моментот на парот е нула).
186. Рамнотежа на круто тело.
За слободно круто тело да биде во рамнотежа, потребно е и доволно системот на сили што се применуваат на него (т.е., во овој случај, надворешните сили) да биде еквивалентен на нула.
Веќе знаеме дека оваа состојба е неопходна, бидејќи претставува општа рамнотежа.
За цврсто тело, исто така, се покажува дека е доволно. Всушност, ако системот на сили е еквивалентен на нула, тој може да се сведе на нула со елементарни операции и, според тоа, сите сили што го сочинуваат може едноставно да се отфрлат. Врз основа на ова, имаме два услови на рамнотежа во векторска форма
Овие услови се распаѓаат на шест алгебарски равенки. Нека X, Y, Z се проекциите на векторот R на три правоаголни координатни оски, или збирот на проекциите на сите сили на истата оска; нека понатаму L, M,
Резултирачките моменти на системот на овие сили во однос на истите оски; тогаш овие шест равенки ќе бидат:
Често се вели дека првите три равенки (еквивалентни на еднаквоста R = 0) ги претставуваат условите за рамнотежа за преводно движење, а последните три (еквивалентни на еднаквоста G = 0) ги претставуваат условите за рамнотежа за ротација. Основата за ваквите имиња ќе ја добиеме подоцна, кога ќе го примениме принципот на виртуелна работа за решавање на истиот проблем.
187. Намалување на силите што се применуваат на круто тело (динамичка гледна точка). Динамична рамнотежа.
Во динамиката на круто тело, ќе покажеме дека во случај на слободно круто тело, неговото движење ќе биде целосно определено ако за секој момент од времето главниот вектор и главниот момент за одредена точка од сите сили што се применуваат на него. дадени се. Оттука ја имаме следната теорема:
Ако два системи на сили кои се применуваат на круто тело се постојано еквивалентни еден на друг од гледна точка на векторската теорија, тогаш тие ќе бидат еквивалентни од гледна точка на движењето на телото.
Оваа теорема суштински се однесува на динамиката, но исто така е тесно поврзана со геометриската статика. Навистина, може да се докаже со користење на многу едноставна генерализација на главниот постулат, што ја појаснува дефиницијата за круто тело во статиката (точка 184).
Всушност, да го замениме овој постулат со следново:
Без промена на ништо во состојба на мирување или движење на круто тело, може да се додадат или одземат две еднакви и директно спротивни сили што се применуваат на две точки од телото.
Овој поопшт постулат, кој исто така може директно да се потврди со искуство, ни овозможува да го дадеме следново
истото генерализирање на концептот на намалување и еквивалентност на силите. Всушност, во сите реченици од став 185 е можно зборовите „без нарушување на рамнотежата“ да се заменат со зборовите „без да се менува ништо во состојба на мирување или движење на телото“. Тогаш заклучокот од став 185 излегува дека е еквивалентен на динамичкиот принцип изразен овде.
Конкретно да забележиме една последица:
Ако круто тело, под влијание на системот на сили S, остане во рамнотежа, тогаш овој систем на сили (што е еквивалентен на нула) не може да промени ништо во состојбата на движење на телото, ако ова не е повеќе во мирување. .
Сега е сосема природно да се утврди следнава дефиниција:
Даден систем на сили е во рамнотежа од гледна точка на динамика, или во динамичка рамнотежа ако силите не можат да ја променат состојбата на мирување или движењето на крутото тело на кое се применуваат.
Имајќи ја оваа дефиниција, можеме да го дадеме следниот предлог:
За силите што се применуваат на цврсто тело да бидат во динамичка рамнотежа, потребно е и доволно тие да претставуваат систем на вектори еквивалентен на нула.
Овој начин на претставување на рамнотежата на силите што се применуваат на цврсто тело е многу распространет, а зборот „рамнотежа“ многу често се користи во оваа смисла. Сепак, не треба да се изгуби од вид фактот дека оваа идеја за рамнотежа се однесува повеќе на динамика отколку на статика.
188. Тежиште на цврсто тело.
Намалувањето на силите што се применуваат на круто тело може, особено, да се изврши за тежинските сили на сите материјални точки од кои се состои телото. Сите овие сили претставуваат паралелни сили, подеднакво ориентирани. Затоа, овој систем на вектори се сведува на една резултантна, еднаква на вкупната тежина P на крутото тело и се применува во центарот на овие паралелни вектори, кои
ќе означиме G. Оваа точка, чија положба во телото не зависи од неговата ориентација во однос на површината на Земјата, е центар на гравитација на телото. Ќе видиме во следното поглавје како може да се одредат неговите координати. Од претходните теореми произлегува дека дејството на гравитацијата на различни точки на круто тело, и од статичка и од динамичка гледна точка, е сведено на една сила, вкупната тежина што се применува во центарот на гравитација на телото.