ಲಿವರ್ ಯಾಂತ್ರಿಕತೆ- ಇದು ರಾಡ್-ಆಕಾರದ ಲಿವರ್ ರಚನೆಗಳ ರೂಪದಲ್ಲಿ ಮಾಡಿದ ಲಿಂಕ್ಗಳಿಂದ ರೂಪುಗೊಂಡ ಕಾರ್ಯವಿಧಾನವಾಗಿದೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಬಹುತೇಕ ಎಲ್ಲಾ ರೀತಿಯ ಯಂತ್ರಗಳಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಹರಡಿವೆ.
2.1. ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂಗಳ ವರ್ಗೀಕರಣ
ಸಂಪೂರ್ಣ ವೈವಿಧ್ಯಮಯ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿ ಮತ್ತು ರಚನೆಯ ಪ್ರಕಾರವಾಗಿ ವರ್ಗೀಕರಿಸಲಾಗಿದೆ.
ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯ ಪ್ರಕಾರವನ್ನು ಆಧರಿಸಿ, ಎರಡು ಗುಂಪುಗಳನ್ನು ಪ್ರತ್ಯೇಕಿಸಲಾಗಿದೆ.
ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯೊಂದಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳು - ಇವು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು -
ಅವುಗಳ ರಚನೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ನಿಸ್ಮ್ಗಳು ಕೇವಲ ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರವನ್ನು ಹೊಂದಿರುತ್ತವೆ
ಸ್ಕೀ ಸರಪಳಿಗಳು (ಚಿತ್ರ 1.6, ಚಿತ್ರ 2.1 ನೋಡಿ).
ತೆರೆದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯೊಂದಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳು - ಇವು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ
ಅವುಗಳ ರಚನೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಕಾರ್ಯವಿಧಾನಗಳು ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳನ್ನು ಮಾತ್ರ ತೆರೆಯುತ್ತವೆ (Fig. 1.4, c, Fig. 2.7 ನೋಡಿ).
ಹೆಚ್ಚಿನ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯೊಂದಿಗೆ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಸಮತಲ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ ಮತ್ತು ತೆರೆದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯೊಂದಿಗೆ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಪ್ರಾದೇಶಿಕವಾದವುಗಳಾಗಿವೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನೆಯು ಪ್ರಾಥಮಿಕ, ಸರಳ ಅಥವಾ ಸಂಕೀರ್ಣವಾಗಿರಬಹುದು.
ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು- ಇವುಗಳು ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಅದರ ರಚನೆಯನ್ನು ಸ್ವತಂತ್ರವಾಗಿ ಚಲನೆಯನ್ನು ಪರಿವರ್ತಿಸುವ ಸಾಮರ್ಥ್ಯವಿರುವ ಭಾಗಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗುವುದಿಲ್ಲ
(ಚಿತ್ರ 2.3).
ಸರಳ ಕಾರ್ಯವಿಧಾನಗಳು- ಇವುಗಳು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇದರ ರಚನೆಯು ಒಂದು ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನ ಮತ್ತು ಒಂದು ರಚನಾತ್ಮಕ ಗುಂಪನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ
(ಚಿತ್ರ 1.6, ಚಿತ್ರ 2.1).
ಸಂಕೀರ್ಣ ಕಾರ್ಯವಿಧಾನಗಳು- ಇವುಗಳು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇದರ ರಚನೆಯು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಎರಡು ಅಥವಾ ಹೆಚ್ಚಿನ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ.
ಸಂಕೀರ್ಣ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ವಿಂಗಡಿಸಲಾಗಿದೆ:
ಒಂದೇ ಪ್ರಕಾರಕ್ಕೆ - ಇವು ಸಂಕೀರ್ಣ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇದರ ರಚನೆಯು ಒಂದೇ ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಲಿಂಕ್ಗಳ ಒಂದೇ ರೀತಿಯ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ;
ಬಹು-ಪ್ರಕಾರ - ಇವು ಸಂಕೀರ್ಣ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇದರ ರಚನೆಯು ವಿಭಿನ್ನ ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಲಿಂಕ್ಗಳ ವಿವಿಧ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಒಳಗೊಂಡಿದೆ;
ಸಂಯೋಜಿಸಲಾಗಿದೆ- ಇವು ಸಂಕೀರ್ಣ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇವುಗಳ ರಚನೆಯು ಒಂದೇ ರೀತಿಯ ಮತ್ತು ಬಹು-ರೀತಿಯ ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಯೋಜನೆಯ ಪರಿಣಾಮವಾಗಿ ರೂಪುಗೊಳ್ಳುತ್ತದೆ.
ಎಲ್ಲಾ ಸರಳ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಸಮತಟ್ಟಾದ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ, ಇವುಗಳನ್ನು ಮೂಲ ವಿಶಿಷ್ಟ ಯೋಜನೆಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ:
ಹಿಂಜ್ ಯಾಂತ್ರಿಕತೆ (Fig. 1.6, ಬಿ ನೋಡಿ);
2. ಲಿವರ್ ಗೇರ್ಸ್
2.1.
ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಯಾಂತ್ರಿಕತೆ (Fig. 1.6, a ನೋಡಿ); ರಾಕರ್ ಯಾಂತ್ರಿಕತೆ (Fig. 2.1, a); ಸ್ಪರ್ಶಕ ಯಾಂತ್ರಿಕ (Fig. 2.1, b); ಸೈನಸ್ ಯಾಂತ್ರಿಕತೆ (ಚಿತ್ರ 2.1, ಸಿ).
ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಚಲಿಸುವ ಲಿಂಕ್ಗಳು ಸರಳವಾದ ರೀತಿಯ ಚಲನೆಗಳನ್ನು (ತಿರುಗುವ ಮತ್ತು ಅನುವಾದ) ಮತ್ತು ಸಂಕೀರ್ಣ ಚಲನೆಗಳನ್ನು ನಿರ್ವಹಿಸಬಹುದು.
ಅಕ್ಕಿ. 2.1. ವಿಶಿಷ್ಟ ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರಗಳು
ತಿರುಗುವ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುವ ಲಿಂಕ್ಗಳಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್, ರಾಕರ್ ಆರ್ಮ್, ರಾಕರ್ ಮತ್ತು ಸ್ವಿಂಗ್ ಸ್ಲೈಡರ್ ಸೇರಿವೆ.
ಕ್ರ್ಯಾಂಕ್ ಎನ್ನುವುದು ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಲಿಂಕ್ ಆಗಿದೆ, ಇದು ಕೇವಲ ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಭಾಗವಾಗಿದೆ ಮತ್ತು 360 ° ಕ್ಕಿಂತ ಹೆಚ್ಚು ಕೋನದಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದೆ (ಚಿತ್ರ 1.6, ಚಿತ್ರ 2.1, ಲಿಂಕ್ 1 ನೋಡಿ) .
ರಾಕರ್ ಆರ್ಮ್ ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಲಿಂಕ್ ಆಗಿದೆ, ಇದು ಕೇವಲ ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಭಾಗವಾಗಿದೆ ಮತ್ತು 360 ° ಕ್ಕಿಂತ ಕಡಿಮೆ ಕೋನದಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದೆ (ಚಿತ್ರ 1.6, ಲಿಂಕ್ 4 ನೋಡಿ).
ಲಿಂಕ್ ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಲಿಂಕ್ ಆಗಿದೆ, ಇದು ತಿರುಗುವ ಮತ್ತು ಭಾಷಾಂತರ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಭಾಗವಾಗಿದೆ ಮತ್ತು 360 ° ಕ್ಕಿಂತ ಕಡಿಮೆ ಕೋನದಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದೆ (ಚಿತ್ರ 2.1, ಲಿಂಕ್ 5).
ರಾಕಿಂಗ್ ಸ್ಲೈಡರ್- ಇದು ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂನ ಲಿಂಕ್ ಆಗಿದೆ, ಇದು ರಾಡ್ನೊಂದಿಗೆ ಅನುವಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ಮತ್ತು ಸ್ಟ್ಯಾಂಡ್ನೊಂದಿಗೆ ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುತ್ತದೆ.
ಪ್ರಸ್ತುತಪಡಿಸಿದ ಎಲ್ಲಾ ಲಿಂಕ್ಗಳು ರಾಕ್ನೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುತ್ತವೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಹೆಚ್ಚಿನ ಸಂದರ್ಭಗಳಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ ಆರಂಭಿಕ, ಸೆಟ್ ಅಥವಾ ಪ್ರಮುಖ ಲಿಂಕ್ ಆಗಿದೆ.
ಅನುವಾದ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುವ ಲಿಂಕ್ಗಳು ಸ್ಲೈಡರ್, ಕಲ್ಲು ಮತ್ತು ರಾಡ್ ಅನ್ನು ಒಳಗೊಂಡಿವೆ.
ಸ್ಲೈಡರ್ ಸ್ಟ್ಯಾಂಡ್ನೊಂದಿಗೆ ಅನುವಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುವ ಲಿಂಕ್ ಆಗಿದೆ (Fig. 1.6, ಲಿಂಕ್ 3 ನೋಡಿ).
ಕಲ್ಲು ಸ್ಲೈಡ್ (Fig. 2.1, ಲಿಂಕ್ 6) ನೊಂದಿಗೆ ಭಾಷಾಂತರ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುವ ಲಿಂಕ್ ಆಗಿದೆ.
ರಾಡ್ ಸ್ವಿಂಗಿಂಗ್ ಅಥವಾ ಸ್ಥಾಯಿ ಸ್ಲೈಡರ್ (Fig. 2.1, ಲಿಂಕ್ 7) ನೊಂದಿಗೆ ಭಾಷಾಂತರ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುವ ಲಿಂಕ್ ಆಗಿದೆ.
ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳು ಸಂಕೀರ್ಣ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುವ ಲಿಂಕ್ಗಳಾಗಿವೆ.
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |

2. ಲಿವರ್ ಗೇರ್ಸ್
2.1. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ವರ್ಗೀಕರಣ
ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಲಿವರ್ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಲಿಂಕ್ ಆಗಿದ್ದು ಅದು ಚರಣಿಗೆಯೊಂದಿಗೆ ಸಂಪರ್ಕವನ್ನು ಹೊಂದಿರದ ಚಲಿಸುವ ಲಿಂಕ್ಗಳೊಂದಿಗೆ ಮಾತ್ರ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ರೂಪಿಸುತ್ತದೆ.
(ಚಿತ್ರ 1.6, ಲಿಂಕ್ 2 ನೋಡಿ).
2.2 ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ಯಾವುದೇ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನದ ರಚನೆಯನ್ನು ಅಧ್ಯಯನ ಮಾಡುವಾಗ, ಎರಡು ದಿಕ್ಕುಗಳನ್ನು ಪ್ರತ್ಯೇಕಿಸಲಾಗಿದೆ: ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆ.
ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಕಾರ್ಯವಿಧಾನದ ರಚನೆಯನ್ನು ಅಧ್ಯಯನ ಮಾಡುವ ಪ್ರಕ್ರಿಯೆ, ಅಂದರೆ ಅವರು ನಿರ್ವಹಿಸುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಚಲನೆಯ ಪ್ರಕಾರಗಳು, ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಪ್ರಕಾರ, ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳು, ಚಲನಶೀಲತೆಯ ಸಂಖ್ಯೆ ಮತ್ತು ದೋಷಗಳ ಉಪಸ್ಥಿತಿಯನ್ನು ನಿರ್ಧರಿಸುವುದು.
ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಅವುಗಳ ರಚನೆಯಲ್ಲಿನ ದೋಷಗಳನ್ನು ಗುರುತಿಸುವ ಸಲುವಾಗಿ ನಡೆಸಲಾಗುತ್ತದೆ, ಅಗತ್ಯವಿದ್ದರೆ ಅವುಗಳನ್ನು ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ.
ರಚನಾತ್ಮಕ ದೋಷಗಳನ್ನು ತೆಗೆದುಹಾಕುವ (ನಿರ್ಮೂಲನೆ ಮಾಡುವ) ಉದಾಹರಣೆಯಾಗಿ, ಅಭಾಗಲಬ್ಧ ರಚನೆಯೊಂದಿಗೆ ಫ್ಲಾಟ್ ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯನ್ನು ಪರಿಗಣಿಸಿ (Fig. 1.12, a ನೋಡಿ). ಲಿಂಕ್ಗಳ ಉದ್ದಗಳು ಈ ಕೆಳಗಿನ ಅನುಪಾತಗಳಲ್ಲಿದ್ದರೆ ಮಾತ್ರ ಈ ಕಾರ್ಯವಿಧಾನವು ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ:
yakh: l OA = l BC, l AB = l DE = l OC andl OD = l EC. ಪರಿಣಾಮವಾಗಿ, ಯಾಂತ್ರಿಕತೆಯ ಬಿಂದುಗಳು ಅಂಕಿ OABC ಅನ್ನು ರೂಪಿಸುತ್ತವೆ, ಇದು ಯಾವಾಗಲೂ ಸಮಾನಾಂತರ ಚತುರ್ಭುಜವಾಗಿದೆ. ನಂತರ, ಯಾಂತ್ರಿಕ ಲಿಂಕ್ಗಳ ಚಲನೆಯನ್ನು ಬದಲಾಯಿಸದೆ, ನೀವು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಅನ್ನು ತೆಗೆದುಹಾಕಬಹುದು, ಏಕೆಂದರೆ ಈ ಲಿಂಕ್, ಡಿ ಮತ್ತು ಇ ಬಿಂದುಗಳಲ್ಲಿ ಹಿಂಜ್ ಕೇಂದ್ರಗಳೊಂದಿಗೆ 1 ಮತ್ತು 4 ಲಿಂಕ್ಗಳೊಂದಿಗೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ರೂಪಿಸುತ್ತದೆ, ಈ ಲಿಂಕ್ಗಳ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರದ ಸಂಪರ್ಕ ಷರತ್ತುಗಳನ್ನು ವಿಧಿಸುತ್ತದೆ. ಅವರ ಚಲನೆಯ ಸ್ವರೂಪ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, 1 ಮತ್ತು 4 ಲಿಂಕ್ಗಳಲ್ಲಿ ರಾಡ್ 2 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ಮೂಲಕ ವಿಧಿಸಲಾದ ಸಂಪರ್ಕದ ಷರತ್ತುಗಳು ನಿಷ್ಕ್ರಿಯ ಅಥವಾ ಅನಗತ್ಯವಾಗಿರುತ್ತವೆ. ಪ್ರತಿಯಾಗಿ, D ಮತ್ತು E ಬಿಂದುಗಳಲ್ಲಿ ಹಿಂಜ್ ಕೇಂದ್ರಗಳೊಂದಿಗೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಚಲನಶೀಲತೆಯು ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆಗೆ ಒಂದು ಉದಾಹರಣೆಯಾಗಿದೆ, ಏಕೆಂದರೆ ಅವರ ಅನುಪಸ್ಥಿತಿಯಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ಉಳಿದ ಲಿಂಕ್ಗಳ ಚಲನಶೀಲತೆ ಬದಲಾಗುವುದಿಲ್ಲ. ರಾಡ್ 2 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ಬದಲು ಯಾಂತ್ರಿಕ ರಚನೆಯಿಂದ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 3 ಅನ್ನು ಹೊರತುಪಡಿಸಿದರೆ ಇದೇ ರೀತಿಯ ಪರಿಸ್ಥಿತಿ ಸಂಭವಿಸುತ್ತದೆ.
ರಚನಾತ್ಮಕ ದೋಷಗಳನ್ನು ತೊಡೆದುಹಾಕಲು, ಯಾಂತ್ರಿಕ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಅನಗತ್ಯ ಅಥವಾ ನಿಷ್ಕ್ರಿಯ ಸಂಪರ್ಕಗಳ ಉಪಸ್ಥಿತಿ ಮತ್ತು ಅವುಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿಖರವಾಗಿ ತಿಳಿದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ಅನಗತ್ಯ ಅಥವಾ ನಿಷ್ಕ್ರಿಯ ಸಂಪರ್ಕಗಳ ಸಂಖ್ಯೆಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು, ಈ ಕೆಳಗಿನ ಸಂಬಂಧವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ:
q =W o +W m +W,
ಅಲ್ಲಿ W o ,W m ,W – ನೀಡಲಾಗಿದೆ, ಸ್ಥಳೀಯ ಮತ್ತು ಲೆಕ್ಕಾಚಾರದ ಚಲನಶೀಲತೆ.
ಅನಗತ್ಯ, ಅಥವಾ ನಿಷ್ಕ್ರಿಯ, ಸಂಪರ್ಕಗಳು ಹಲವಾರು ಸರ್ಕ್ಯೂಟ್ಗಳೊಂದಿಗೆ ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳಲ್ಲಿ ಮಾತ್ರ ಲಭ್ಯವಿರುತ್ತವೆ. ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ ಎರಡು ವಿಧದ ಸರ್ಕ್ಯೂಟ್ಗಳಿವೆ: ಅವಲಂಬಿತ ಮತ್ತು ಸ್ವತಂತ್ರ. ಕನಿಷ್ಠ ಒಂದು ಲಿಂಕ್ನಿಂದ ಇತರ ಸರ್ಕ್ಯೂಟ್ಗಳಿಂದ ಭಿನ್ನವಾಗಿದ್ದರೆ ಸರ್ಕ್ಯೂಟ್ ಸ್ವತಂತ್ರವಾಗಿರುತ್ತದೆ. ಅವಲಂಬಿತ ಸರ್ಕ್ಯೂಟ್ಗಳುಪರಸ್ಪರ ನಕಲು, ಮತ್ತು ಅವುಗಳನ್ನು ರೂಪಿಸುವ ಲಿಂಕ್ಗಳು ಅನಗತ್ಯ ಅಥವಾ ನಿಷ್ಕ್ರಿಯ, ಸಂಪರ್ಕಗಳನ್ನು ರಚಿಸುತ್ತವೆ. ಆದ್ದರಿಂದ ಯಾಂತ್ರಿಕತೆಯ ರಚನೆಯನ್ನು ಅಂಜೂರದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗಿದೆ. 1.12, ಹಲವಾರು ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ - OABC ಮತ್ತು ODEC. ಬಾಹ್ಯರೇಖೆಗಳು ಅವಲಂಬಿತವಾಗಿವೆ, ಏಕೆಂದರೆ ಅವು ಒಂದೇ ಪ್ರಮಾಣದಲ್ಲಿ ರೂಪುಗೊಳ್ಳುತ್ತವೆ
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.2.
ಮತ್ತು ಲಿಂಕ್ಗಳ ವಿಧಗಳು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಈ ಕಾರ್ಯವಿಧಾನದ ರಚನೆಯು ದೋಷಗಳನ್ನು ಹೊಂದಿದೆ ಎಂದು ನಾವು ಹಿಂದೆ ಕಂಡುಕೊಂಡಿದ್ದೇವೆ, ಅಂದರೆ, ಇದು ಅನಗತ್ಯ, ಅಥವಾ ನಿಷ್ಕ್ರಿಯ, ಸಂಪರ್ಕಗಳು ಮತ್ತು ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆಯನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಇದು ಅವಲಂಬಿತ ಸರ್ಕ್ಯೂಟ್ಗಳ ಉಪಸ್ಥಿತಿಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಆದ್ದರಿಂದ, ಅವಲಂಬಿತ ಸರ್ಕ್ಯೂಟ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸಲು, ಯಾಂತ್ರಿಕತೆಯ ಒಟ್ಟು ಸರ್ಕ್ಯೂಟ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ಸರ್ಕ್ಯೂಟ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ಅಭಿವ್ಯಕ್ತಿ ಬಳಸಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ
K = p− n,
ಇಲ್ಲಿ p ಎಂಬುದು ಯಾಂತ್ರಿಕತೆಯ ರಚನೆಯಲ್ಲಿನ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ; n ಎಂಬುದು ಯಾಂತ್ರಿಕತೆಯ ಚಲಿಸುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ,
n = k− 1,
ಇಲ್ಲಿ k ಎಂಬುದು ಸ್ಟ್ಯಾಂಡ್ ಸೇರಿದಂತೆ ಯಾಂತ್ರಿಕ ಲಿಂಕ್ಗಳ ಒಟ್ಟು ಸಂಖ್ಯೆ.
ರಚನಾತ್ಮಕ ದೋಷಗಳನ್ನು ಹೊರತುಪಡಿಸಿದ ನಂತರ, ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ಸಂಖ್ಯೆ, ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಪ್ರಕಾರ, ಮುಖ್ಯ ಚಲನಶೀಲತೆಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ನಂತರ, ಔಟ್ಪುಟ್ ಲಿಂಕ್ನಿಂದ ಪ್ರಾರಂಭಿಸಿ, ಜಂಟಿಯಾಗಿ ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾದ ಚಲನಶೀಲತೆಯನ್ನು ಹೊಂದಿರುವ ಲಿಂಕ್ಗಳ ಗುಂಪುಗಳನ್ನು ಪ್ರತ್ಯೇಕಿಸಲಾಗುತ್ತದೆ. ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಉಳಿದಿರುವ ಲಿಂಕ್ಗಳು ಪ್ರಮುಖ ಲಿಂಕ್ನೊಂದಿಗೆ ಸಂಪರ್ಕವನ್ನು ಕಳೆದುಕೊಳ್ಳುವುದಿಲ್ಲ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ.
ಸಾಮಾನ್ಯವಾಗಿ, ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯು ಈ ಕೆಳಗಿನ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಬರುತ್ತದೆ:
ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ:
2) ಯಾಂತ್ರಿಕತೆಯ ಕುಶಲತೆಯನ್ನು ನಿರ್ಧರಿಸುವುದು.
ಸಮತಟ್ಟಾದ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ:
1) ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶೀಲತೆಯನ್ನು ನಿರ್ಧರಿಸುವುದು;
2) ಯಾಂತ್ರಿಕ ರಚನೆಯ ವಿಶ್ಲೇಷಣೆ.
ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯ ಪ್ರಸ್ತುತ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಶೀಲಿಸಿದ ನಂತರ, ಎರಡೂ ರೀತಿಯ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಮೊದಲ ಸಮಸ್ಯೆಯ ಹೋಲಿಕೆಯನ್ನು ನಾವು ಗಮನಿಸಬಹುದು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಎರಡನೇ ಕಾರ್ಯಗಳು, ಸೂತ್ರೀಕರಣದಲ್ಲಿ ಕೆಲವು ವ್ಯತ್ಯಾಸಗಳ ಹೊರತಾಗಿಯೂ, ಅದೇ ಗುರಿಯನ್ನು ಅನುಸರಿಸುತ್ತವೆ - ರಚನಾತ್ಮಕ ದೋಷಗಳ ಉಪಸ್ಥಿತಿಯನ್ನು ಗುರುತಿಸುವುದು.
ಕಾರ್ಯವಿಧಾನಗಳ ಚಲನಶೀಲತೆ
ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶೀಲತೆ- ಇದು ಸ್ವತಂತ್ರ ಸಾಮಾನ್ಯೀಕೃತ ನಿರ್ದೇಶಾಂಕಗಳ ಸಂಖ್ಯೆಯಾಗಿದ್ದು ಅದು ಸಮಯಕ್ಕೆ ಪರಿಗಣಿಸಲಾದ ಕ್ಷಣದಲ್ಲಿ ಸಮತಲದಲ್ಲಿ ಅಥವಾ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಯಾಂತ್ರಿಕ ಲಿಂಕ್ಗಳ ಸ್ಥಾನಗಳನ್ನು ಅನನ್ಯವಾಗಿ ನಿರ್ಧರಿಸುತ್ತದೆ.
ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಗಳ ಚಲನಶೀಲತೆಯನ್ನು ನಿರ್ಧರಿಸಲು ರಚನಾತ್ಮಕ ಸೂತ್ರಗಳನ್ನು P.I. ಸೊಮೊವ್ ಮತ್ತು ಫ್ಲಾಟ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ - P.L. ಚೆಬಿಶೇವ್ ಅವರಿಂದ ಪಡೆಯಲಾಗಿದೆ. ಎರಡೂ ರಚನಾತ್ಮಕ ಸೂತ್ರಗಳು ಅವುಗಳ ನಿರ್ಮಾಣದ ಒಂದೇ ತತ್ವಗಳನ್ನು ಆಧರಿಸಿವೆ; ಆದ್ದರಿಂದ, ಸಾಮಾನ್ಯ ರೂಪದಲ್ಲಿ, ರಚನಾತ್ಮಕ ಸೂತ್ರಗಳನ್ನು ಹೀಗೆ ಪ್ರತಿನಿಧಿಸಬಹುದು
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.2. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
W = H n+ ∑ (H− i) pi ,
i= 1n
ಇಲ್ಲಿ H ಎಂಬುದು ಚಲನಶೀಲತೆಯ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆ (ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ H = 6, ಫ್ಲಾಟ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ H = 3); p i ಎಂಬುದು ಚಲನಶೀಲತೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ;
i ಎಂಬುದು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಚಲನಶೀಲತೆಯ ಸಂಖ್ಯೆ. ರಚನಾತ್ಮಕ ಸೂತ್ರಗಳು ಬರವಣಿಗೆಯ ಎರಡು ರೂಪಗಳನ್ನು ಹೊಂದಿವೆ: 1) ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ವರ್ಗಗಳಲ್ಲಿ:
ಸಮತಟ್ಟಾದ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ P.L. ಚೆಬಿಶೇವ್ ಅವರ ಸೂತ್ರ:
W = 3 n− 2 p5 - p4 ,
W =6 n -5 p 5 -4 p 4 -3 p 3 -2 p 2 -p 1 ,
ಅಲ್ಲಿ p 5, p 4, p 3, p 2, p 1 - ಕ್ರಮವಾಗಿ ಐದನೇ, ನಾಲ್ಕನೇ, ಮೂರನೇ, ಎರಡನೇ ಮತ್ತು ಮೊದಲ ವರ್ಗದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ;
2) ಚಲನಶೀಲ ಜೋಡಿಗಳ ಚಲನಶೀಲತೆಯ ಡಿಗ್ರಿಗಳಲ್ಲಿ: ಸಮತಟ್ಟಾದ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ, P.L. ಚೆಬಿಶೇವ್ ಅವರ ಸೂತ್ರ:
W = 3 n− 2 p1 - p2 ,
ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ P.I. ಸೊಮೊವ್ ಸೂತ್ರ:
W =6 n -5 p 1 -4 p 2 -3 p 3 -2 p 4 -p 5 ,
ಇಲ್ಲಿ p 1 , p 2 , p 3 , p 4 , p 5 - ಕ್ರಮವಾಗಿ ಒಂದು, ಎರಡು, ಮೂರು, ನಾಲ್ಕು ಮತ್ತು ಐದು ಚಲನಶೀಲತೆಗಳನ್ನು ಹೊಂದಿರುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನೆಯ ಸಂಯೋಜನೆ
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಸಂಶ್ಲೇಷಣೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು, ಪ್ರೊಫೆಸರ್ ಎಲ್.ವಿ. ಅಸೂರ್ ಮೂಲ ರಚನಾತ್ಮಕ ವರ್ಗೀಕರಣವನ್ನು ಪ್ರಸ್ತಾಪಿಸಿದರು, ಅದರ ಪ್ರಕಾರ ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ಹೊಂದಿರದ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆಯು ಪ್ರಾಥಮಿಕ (ಪ್ರಾಥಮಿಕ) ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಲಿಂಕ್ಗಳ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ (ಚಿತ್ರ 2.2 )
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |

2. ಲಿವರ್ ಗೇರ್ಸ್
2.2. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆ
ಕಾರ್ಯವಿಧಾನ = PM+...+ PM+ SGZ+...+ SGZ
ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ಅಕ್ಕಿ. 2.2 ಅಸ್ಸೂರ್ ಪ್ರಕಾರ ಯಾಂತ್ರಿಕ ರಚನೆಯ ಸಂಯೋಜನೆ
ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನ(PM) ಚಲಿಸಬಲ್ಲ ಮತ್ತು ಸ್ಥಿರ ಲಿಂಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಒಂದು ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನವಾಗಿದೆ, ಇದು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ಚಲನಶೀಲತೆಯೊಂದಿಗೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುತ್ತದೆ (Fig. 2.3).
ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು | ||||||
ಚಲನಶೀಲತೆ W = 1 ಜೊತೆಗೆ | ಚಲನಶೀಲತೆ W > 1 ಜೊತೆಗೆ | |||||
ಅಕ್ಕಿ. 2.3 ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಗಳು
ವ್ಯಾಖ್ಯಾನದ ಪ್ರಕಾರ, ಎಲ್ಲಾ ಪ್ರಾಥಮಿಕ (ಪ್ರಾಥಮಿಕ) ಕಾರ್ಯವಿಧಾನಗಳು ಒಂದು ಸ್ಟ್ಯಾಂಡ್ನೊಂದಿಗೆ ಚಲಿಸುವ ಲಿಂಕ್ನ ಸಂಯೋಜನೆಯಿಂದ ರೂಪುಗೊಳ್ಳುತ್ತವೆ ಮತ್ತು ಅವು ಪ್ರಥಮ ದರ್ಜೆ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವರ್ಗವು ಚಲಿಸುವ ಭಾಗಗಳ ಸಂಖ್ಯೆಗೆ ಅನುರೂಪವಾಗಿದೆ.
ಲಿಂಕ್ಗಳ ರಚನಾತ್ಮಕ ಗುಂಪು(SGZ) ಒಂದು ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯಾಗಿದ್ದು ಅದು ರೂಪುಗೊಳ್ಳುತ್ತದೆ
ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯ ಚಲಿಸುವ ಲಿಂಕ್ಗಳಿಂದ ಸ್ನಾನ ಮಾಡಲ್ಪಟ್ಟಿದೆ, ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಮತ್ತು ಸಮತಲದಲ್ಲಿ ಚಲನಶೀಲತೆ ಯಾವುದೇ ಸಮಯದಲ್ಲಿ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ ಮತ್ತು ಒಂದೇ ರೀತಿಯ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಸರಳವಾದ ಸರಪಳಿಗಳಾಗಿ ಒಡೆಯುವುದಿಲ್ಲ
(ಅಕ್ಕಿ. 2.4., ಚಿತ್ರ 2.5., ಚಿತ್ರ 2.6).
ಆರಂಭದಲ್ಲಿ, L.V. ಅಸೂರ್ನ ರಚನಾತ್ಮಕ ವರ್ಗೀಕರಣವು ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳೊಂದಿಗೆ ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಮಾತ್ರ ಒಳಗೊಂಡಿದೆ. ತರುವಾಯ, ಪ್ರೊಫೆಸರ್ I. I. ಆರ್ಟೊಬೊಲೆವ್ಸ್ಕಿ ಈ ವರ್ಗೀಕರಣವನ್ನು ಸುಧಾರಿಸಿದರು, ಅದನ್ನು ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಮತ್ತು ಅನುವಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳೊಂದಿಗೆ ವಿಸ್ತರಿಸಿದರು, ಇದು ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ಸಿದ್ಧಾಂತದ ರಚನೆಗೆ ಆಧಾರವನ್ನು ಹಾಕಿತು, ಅದರ ಪ್ರಕಾರ ರಚನಾತ್ಮಕ ಗುಂಪು ಕಡಿಮೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಹೊಂದಿರುವ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯಾಗಿದೆ. ಸ್ಥಿತಿಯನ್ನು ತೃಪ್ತಿಪಡಿಸುತ್ತದೆ
W s.g= 3 n s.g− 2 p 1− p 2= 0 ,
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.2. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ಇಲ್ಲಿ W s.g , n s.g - ಚಲನಶೀಲತೆ ಮತ್ತು ರಚನಾತ್ಮಕ ಗುಂಪಿನ ಚಲಿಸುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ
ಪೈ; p 1 ,p 2 - ಅನುಗುಣವಾದ ಚಲನಶೀಲತೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ. ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ವೈಶಿಷ್ಟ್ಯವೆಂದರೆ ಅವುಗಳ ಸ್ಥಿರ ಅನಿಶ್ಚಿತತೆ
ಸೀಮಿತತೆ ಲಿಂಕ್ಗಳ ಉಚಿತ ಅಂಶಗಳೊಂದಿಗೆ ರಚನಾತ್ಮಕ ಗುಂಪನ್ನು ರ್ಯಾಕ್ಗೆ ಜೋಡಿಸಿದರೆ, ನಂತರ ಸ್ಥಿರವಾಗಿ ಅನಿರ್ದಿಷ್ಟ ಟ್ರಸ್ ರಚನೆಯಾಗುತ್ತದೆ. ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ಈ ಆಸ್ತಿಯನ್ನು ಬಳಸಿಕೊಂಡು, ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ, ಚಲನಶಾಸ್ತ್ರ ಮತ್ತು ಬಲ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಕೈಗೊಳ್ಳಲು ಅನುಕೂಲಕರವಾಗಿದೆ. ಎಲ್ಲಾ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳಲ್ಲಿ, ಅಂತಿಮ ಲಿಂಕ್ಗಳು ಕೇವಲ ಒಂದು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಭಾಗವಾಗಿದೆ ಮತ್ತು ಉಚಿತ ಲಿಂಕ್ ಅಂಶವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಅಂತಹ ಲಿಂಕ್ಗಳನ್ನು leashes ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಒಂದು ಬಾರು ರಚನಾತ್ಮಕ ಗುಂಪಿನ ಅಂತಿಮ ಕೊಂಡಿಯಾಗಿದೆ, ಒಂದು ಅಂಶವು ಒಂದು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಭಾಗವಾಗಿದೆ ಮತ್ತು ಲಿಂಕ್ನ ಎರಡನೇ ಉಚಿತ ಅಂಶವನ್ನು ಹೊಂದಿದೆ.
ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಚಲಿಸುವ ಘಟಕಗಳ ಸಮ ಸಂಖ್ಯೆಯ ಮೂಲಕ ಮಾತ್ರ ರಚಿಸಬಹುದು (ಚಿತ್ರ 2.4 - 2.6 ನೋಡಿ). ರಚನಾತ್ಮಕ ಗುಂಪಿನ ಸಂಕೀರ್ಣತೆಯ ಮಟ್ಟವನ್ನು ಅದರ ವರ್ಗದಿಂದ ನಿರೂಪಿಸಲಾಗಿದೆ. ರಚನಾತ್ಮಕ ಗುಂಪಿನ ವರ್ಗವನ್ನು ಲಿಂಕ್ಗಳು ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಇದು ಅತ್ಯಂತ ಸಂಕೀರ್ಣವಾದ ಲಿಂಕ್ನ ಶೃಂಗಗಳ ಸಂಖ್ಯೆಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ. ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ಸಂಕೀರ್ಣತೆಯು ಯಾಂತ್ರಿಕತೆಯ ವರ್ಗವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. ಅಂತೆಯೇ, ಯಾಂತ್ರಿಕತೆಯ ವರ್ಗವನ್ನು ಅದರ ಸಂಯೋಜನೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಅತ್ಯಂತ ಸಂಕೀರ್ಣವಾದ ರಚನಾತ್ಮಕ ಗುಂಪಿನ ವರ್ಗದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಒಂದು ವರ್ಗದೊಳಗೆ, ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಆದೇಶಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ. ರಚನಾತ್ಮಕ ಗುಂಪಿನ ಕ್ರಮವು ಲೀಡ್ಗಳ ಸಂಖ್ಯೆಗೆ ಅನುರೂಪವಾಗಿದೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನೆಯಲ್ಲಿ, ಎರಡು ಲಿಂಕ್ಗಳು (2 ಮತ್ತು 3) ಮತ್ತು ಐದನೇ ತರಗತಿಯ ಮೂರು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಸಾಮಾನ್ಯ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು (Fig. 2.4). ಈ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು ಎರಡು ಶೃಂಗಗಳೊಂದಿಗೆ ಎರಡು ಚಲಿಸಬಲ್ಲ ಲಿಂಕ್ಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ, ಇದು ಎರಡನೇ ವರ್ಗಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಎರಡನೇ ವರ್ಗದ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು ಕನಿಷ್ಟ ಎರಡು ಬಾರುಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ, ಇದು ವರ್ಗದೊಳಗೆ ಹಲವಾರು ಆದೇಶಗಳ ಉಪಸ್ಥಿತಿಯನ್ನು ಸೂಚಿಸುತ್ತದೆ. ಪ್ರಸ್ತುತ, ಎರಡನೇ ಕ್ರಮಾಂಕದ ಎರಡನೇ ವರ್ಗದ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿ ಹರಡಿವೆ, ಅದರ ವಿಶಿಷ್ಟ ಲಕ್ಷಣವೆಂದರೆ ಐದು ವಿಧಗಳ ಉಪಸ್ಥಿತಿ (ಚಿತ್ರ 2.4).
ರಚನಾತ್ಮಕ ಗುಂಪಿನ ಪ್ರಕಾರವನ್ನು ಅದರ ರಚನಾತ್ಮಕ ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಇದು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಪ್ರಕಾರ ಮತ್ತು ವರ್ಗವನ್ನು ಅವಲಂಬಿಸಿ ಸಂಕಲಿಸುತ್ತದೆ. ಎರಡನೇ ಕ್ರಮಾಂಕದ ಎರಡನೇ ವರ್ಗದ (Fig. 2.4, a) ರಚನಾತ್ಮಕ ಗುಂಪು ಎರಡು ಲಿಂಕ್ಗಳು, ಎರಡು ಲೀಡ್ಗಳಿಂದ ರೂಪುಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಐದನೇ ತರಗತಿಯ ಮೂರು ತಿರುಗುವ ಜೋಡಿಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ, ರಚನಾತ್ಮಕ ಸೂತ್ರ BBB ಅನ್ನು ಹೊಂದಿದೆ, ಇದು ಮೊದಲ ಪ್ರಕಾರಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಎರಡನೇ ಕ್ರಮಾಂಕದ (Fig. 2.4, b) ಎರಡನೇ ವರ್ಗದ ಗುಂಪಿನ ಎರಡನೇ ವಿಧವನ್ನು ಐದನೇ ವರ್ಗದ ಭಾಷಾಂತರ ಜೋಡಿಯೊಂದಿಗೆ ತೀವ್ರವಾದ ತಿರುಗುವಿಕೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳಲ್ಲಿ ಒಂದನ್ನು ಬದಲಿಸುವ ಮೂಲಕ ಪಡೆಯಲಾಗುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ ಗುಂಪಿನ ರಚನಾತ್ಮಕ ಸೂತ್ರವು ಜಿಡಿಪಿ ಅಥವಾ ಪಿವಿವಿ ರೂಪವನ್ನು ಹೊಂದಿರುತ್ತದೆ.
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |

2. ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಮ್ಸ್ | |||||||||||
2.2 ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ | |||||||||||
4 ಎ 1 | |||||||||||
ಅಕ್ಕಿ. 2.4 ಎರಡನೇ ಕ್ರಮಾಂಕದ ಎರಡನೇ ವರ್ಗದ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು | |||||||||||
ಎರಡನೇ ಕ್ರಮಾಂಕದ (Fig. 2.4, c) ಎರಡನೇ ವರ್ಗದ ಮೂರನೇ ವಿಧದ ರಚನಾತ್ಮಕ ಗುಂಪು ERW ನ ರಚನಾತ್ಮಕ ಸೂತ್ರವನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ಐದನೇ ತರಗತಿಯ ಅನುವಾದ ಜೋಡಿಯೊಂದಿಗೆ ಸರಾಸರಿ ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ಬದಲಿಸುವ ಕಾರಣದಿಂದಾಗಿ ರೂಪುಗೊಳ್ಳುತ್ತದೆ. ಎರಡನೇ ಕ್ರಮಾಂಕದ (Fig. 2.4, d) ಎರಡನೇ ವರ್ಗದ ನಾಲ್ಕನೇ ವಿಧದ ಗುಂಪುಗಳನ್ನು ಐದನೇ ತರಗತಿಯ ಎರಡೂ ತೀವ್ರ ತಿರುಗುವಿಕೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಅನುವಾದ ಜೋಡಿಗಳೊಂದಿಗೆ ಬದಲಾಯಿಸುವ ಮೂಲಕ ಪಡೆಯಲಾಗುತ್ತದೆ, ಇದು PVP ಯ ರಚನಾತ್ಮಕ ಸೂತ್ರಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ತೀವ್ರ ಮತ್ತು ಮಧ್ಯದ ತಿರುಗುವಿಕೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳಲ್ಲಿ ಒಂದನ್ನು ಅನುವಾದ ಜೋಡಿಗಳೊಂದಿಗೆ ಬದಲಾಯಿಸುವುದರಿಂದ ಎರಡನೇ ಕ್ರಮಾಂಕದ (Fig. 2.4, d) ರಚನಾತ್ಮಕ ಸೂತ್ರ PPV ಅಥವಾ VPP ಅನ್ನು ಹೊಂದಿರುವ ಎರಡನೇ ವರ್ಗದ ಐದನೇ ವಿಧದ ಗುಂಪನ್ನು ಪಡೆಯಲು ನಮಗೆ ಅನುಮತಿಸುತ್ತದೆ.
ಕೇವಲ ಎರಡನೇ ದರ್ಜೆಯ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಹೊಂದಿರುವ ಕಾರ್ಯವಿಧಾನಗಳು ಎರಡನೇ ದರ್ಜೆಯ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ.
ಸೈದ್ಧಾಂತಿಕವಾಗಿ, ದೊಡ್ಡ ವರ್ಗಗಳ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳಿವೆ, ಆದರೆ ಪಠ್ಯಕ್ರಮದಲ್ಲಿ ಅವುಗಳ ಕಡಿಮೆ ಹರಡುವಿಕೆಯಿಂದಾಗಿ, ನಾವು ಎರಡನೇ ವರ್ಗದ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳಿಗೆ ನಮ್ಮನ್ನು ಮಿತಿಗೊಳಿಸುತ್ತೇವೆ.
ಪ್ರಾದೇಶಿಕ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಕುಶಲತೆ
ಪ್ರಾದೇಶಿಕ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಸಾಮಾನ್ಯ ಪ್ರತಿನಿಧಿಗಳು ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳು (Fig. 2.5, a).
ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ ಎನ್ನುವುದು ಪ್ರಾದೇಶಿಕ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನವಾಗಿದ್ದು ಅದು ಮಾನವ ಕೈಯಂತೆಯೇ ಕ್ರಿಯೆಗಳನ್ನು ಮಾಡುತ್ತದೆ.
ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳನ್ನು ವಸ್ತುಗಳ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳ ಲಿಂಕ್ಗಳು ಮಾತ್ರ ರೂಪಿಸುತ್ತವೆ
ವಿವಿಧ ವರ್ಗಗಳ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಹೊಂದಿರುವ ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳು, ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳು ಏಕತೆಗಿಂತ ಹೆಚ್ಚಿನ ಚಲನಶೀಲತೆಯನ್ನು ಹೊಂದಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಆದಾಗ್ಯೂ, ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳು ಅದರ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ರಚನೆಯನ್ನು ಬದಲಾಯಿಸುವ ಸಾಮರ್ಥ್ಯದಿಂದ ನಿರೂಪಿಸಲ್ಪಟ್ಟಿವೆ. ಸೇವೆಯ ಉದ್ದೇಶವನ್ನು ಅವಲಂಬಿಸಿ, ಎರಡು ಆಯ್ಕೆಗಳು ಸಾಧ್ಯ.
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |

2. ಲಿವರ್ ಗೇರ್ಸ್
2.2. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ಅಕ್ಕಿ. 2.5 ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ ಕಾರ್ಯವಿಧಾನದ ರೇಖಾಚಿತ್ರ
ಮೊದಲ ಆಯ್ಕೆ: ನೀವು ಸ್ಥಾಯಿ ವಸ್ತುವಿನ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸಬೇಕಾಗಿದೆ (Fig. 2.5, a). ಸಮಯದ ಆರಂಭಿಕ ಕ್ಷಣದಲ್ಲಿ, ಅದರ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸಬೇಕಾದ ವಸ್ತುವು ಸ್ಥಾಯಿ ಸಮತಲದಲ್ಲಿದೆ ಮತ್ತು ವಿಶ್ರಾಂತಿಯಲ್ಲಿದೆ. ಅಂತೆಯೇ, ವಸ್ತು ಮತ್ತು ವಿಮಾನವು ಪರಸ್ಪರ ಕೆಲವು ಸಂಪರ್ಕಗಳನ್ನು ವಿಧಿಸುತ್ತದೆ. ಇದಲ್ಲದೆ, ವಿಮಾನ ಮತ್ತು ವಸ್ತುವಿನ ನಡುವಿನ ಸಂಬಂಧವು ಅದರ ಚಲನಶಾಸ್ತ್ರದ ಸ್ಥಿತಿಯನ್ನು ಬದಲಾಯಿಸದಿದ್ದರೆ, ಅವುಗಳನ್ನು ಒಂದು ಸ್ಥಿರ ಲಿಂಕ್ ಎಂದು ಪರಿಗಣಿಸಬಹುದು, ಅದು ಒಂದು ನಿಲುವು. ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಮೂಲಕ ಪ್ರಶ್ನೆಯಲ್ಲಿರುವ ವಸ್ತುವಿನ ಸೆರೆಹಿಡಿಯುವಿಕೆಗೆ ಅನುಗುಣವಾದ ಸಮಯದ ಕ್ಷಣದಲ್ಲಿ, ಈ ಲಿಂಕ್ ಸಹ ಚಲನರಹಿತವಾಗಿರುತ್ತದೆ ಮತ್ತು ಅದನ್ನು ರಾಕ್ನ ಅಂಶವಾಗಿ ಪರಿಗಣಿಸಬೇಕು (Fig. 2.5, b). ಅಂತೆಯೇ, ಕಾರ್ಯವಿಧಾನದ ರಚನೆಯಲ್ಲಿ ಚಲಿಸುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆಯು ಒಂದರಿಂದ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಮತ್ತು ಈ ಕ್ಷಣದವರೆಗೆ ಯಾಂತ್ರಿಕತೆಯು ಹೊಂದಿದ್ದ ತೆರೆದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯು ಮುಚ್ಚಲ್ಪಡುತ್ತದೆ, ಇದು ಅದರ ಚಲನಶೀಲತೆಯ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ. ಮುಂದಿನ ಕ್ಷಣದಲ್ಲಿ, ವಸ್ತುವನ್ನು ಮತ್ತಷ್ಟು ಚಲಿಸಲು ಸ್ಥಾಯಿ ಸಮತಲದಿಂದ ಹರಿದು ಹಾಕುವ ಅವಶ್ಯಕತೆಯಿದೆ. ಆದಾಗ್ಯೂ, ಅಂತಹ ಕ್ರಿಯೆಯನ್ನು ನಿರ್ವಹಿಸಲು, ಒಂದು ನಿರ್ದಿಷ್ಟ ಕ್ಷಣದಲ್ಲಿ ಮುಚ್ಚಿದ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯನ್ನು ಹೊಂದಿರುವ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ ಕನಿಷ್ಠ ಒಂದಕ್ಕೆ ಸಮಾನವಾದ ಚಲನಶೀಲತೆಯನ್ನು ಹೊಂದಿರಬೇಕು. ಸ್ಥಿರ ಸಮತಲದಿಂದ ವಸ್ತುವನ್ನು ಬೇರ್ಪಡಿಸಿದ ತಕ್ಷಣ, ಅದು ಈ ಸಮತಲದೊಂದಿಗೆ ಅದರ ಹಿಂದೆ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ಸಂಬಂಧವನ್ನು ಕಳೆದುಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಭವಿಷ್ಯದಲ್ಲಿ ಅದನ್ನು ಔಟ್ಪುಟ್ ಲಿಂಕ್ನೊಂದಿಗೆ ಒಂದು ಚಲಿಸುವ ಲಿಂಕ್ನಂತೆ ಪರಿಗಣಿಸಬೇಕು. ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಮೂಲಕ ಚಲನಶೀಲತೆಯ ಮರುಸ್ಥಾಪನೆಯ ಕ್ಷಣದಲ್ಲಿ, ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯು ಮತ್ತೆ ತೆರೆದುಕೊಳ್ಳುತ್ತದೆ, ಇದು ಯಾಂತ್ರಿಕತೆಯ ಹಿಂದಿನ ಚಲನಶೀಲತೆಗೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ಕಾನೂನಿನ ಪ್ರಕಾರ ವಸ್ತುವನ್ನು ಚಲಿಸುವ ಸಾಮರ್ಥ್ಯಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ.
ಎರಡನೆಯ ಆಯ್ಕೆ: ಸ್ಥಿರ ಮೇಲ್ಮೈಯಲ್ಲಿ ಮಾಡಿದ ನಿರ್ದಿಷ್ಟ ಆಕಾರದ ರಂಧ್ರಕ್ಕೆ ನೀವು ಭಾಗವನ್ನು ಸ್ಥಾಪಿಸಬೇಕಾಗಿದೆ. ರಂಧ್ರದೊಳಗೆ ಭಾಗದ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಅನುಸ್ಥಾಪನೆಗೆ ಅನುಗುಣವಾದ ಸಮಯದ ಕ್ಷಣದಲ್ಲಿ, ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಚಲಿಸಬಲ್ಲದು, ಮತ್ತು ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯು ಮುಚ್ಚುತ್ತದೆ (Fig. 2.5, c). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಚಲಿಸುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ, ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶೀಲತೆಯು ಭಾಗದಿಂದ ರೂಪುಗೊಂಡ ಹೊಸ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಚಲನಶೀಲತೆಗೆ ಅನುಗುಣವಾಗಿ ಮತ್ತು ಅದನ್ನು ಸ್ಥಾಪಿಸಿದ ಸ್ಥಿರ ಮೇಲ್ಮೈಗೆ ಅನುಗುಣವಾಗಿ ಬದಲಾಗುತ್ತದೆ. ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಮತ್ತು ಭಾಗದ ನಡುವಿನ ಸಂಪರ್ಕದ ಮುಕ್ತಾಯದ ಕ್ಷಣದಲ್ಲಿ
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.2. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಯು ತೆರೆದುಕೊಳ್ಳುತ್ತದೆ, ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯು ಅದರ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಪುನಃಸ್ಥಾಪಿಸುತ್ತದೆ.
ಪರಿಗಣಿಸಲಾದ ಸನ್ನಿವೇಶಗಳಿಂದ, ಈ ಕೆಳಗಿನ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸಿದರೆ ಮಾತ್ರ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುವುದು ಸಾಧ್ಯ ಎಂದು ಅದು ಅನುಸರಿಸುತ್ತದೆ:
ಮೀ ≥ 1.
ಇಲ್ಲಿ m ಎಂಬುದು ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಕುಶಲತೆಯಾಗಿದೆ.
ಕುಶಲತೆಯು ಸ್ಥಾಯಿ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನೊಂದಿಗೆ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಚಲನಶೀಲತೆಯಾಗಿದೆ.
ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಗಳ ಕುಶಲತೆಯನ್ನು ಸೊಮೊವ್ ಸೂತ್ರದ ಆಧಾರದ ಮೇಲೆ ಪಡೆದ ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
m =6 n -5 p 5 -4 p 4 -3 p 3 -2 p 2 -p 1
ಅಲ್ಲಿ ಎಲ್ಲಾ ಗುಣಾಂಕಗಳು § 2.3 ರಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಿದಂತೆಯೇ ಇರುತ್ತವೆ.
2.3 ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂಸ್ ಸಿಂಥೆಸಿಸ್
ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ಎರಡು ಹಂತಗಳಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ. ಮೊದಲ ಹಂತವನ್ನು ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಮತ್ತು ಎರಡನೆಯದನ್ನು ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಪ್ರತಿ ಹಂತದಲ್ಲಿ ಅನುಸರಿಸುವ ಸಾಮಾನ್ಯ ಮಾನದಂಡಗಳೆಂದರೆ: ಒಟ್ಟಾರೆ ತೂಕದ ಗುಣಲಕ್ಷಣಗಳು ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯ ವೆಚ್ಚವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು, ಜೊತೆಗೆ ಲಿಂಕ್ಗಳ ಉತ್ಪಾದನೆಯನ್ನು ಖಚಿತಪಡಿಸುವುದು ಮತ್ತು ಆಪರೇಟಿಂಗ್ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸುವುದು. ಆದಾಗ್ಯೂ, ಪ್ರತಿ ಹಂತವು ವಿಭಿನ್ನ ಗುರಿಗಳನ್ನು ಹೊಂದಿದೆ.
ಪ್ರತಿಯೊಂದು ಹಂತಗಳನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ನಿರೂಪಿಸೋಣ.
ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಅಗತ್ಯವಿರುವ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿರುವ ಯಾಂತ್ರಿಕತೆಯ ಅಸ್ತಿತ್ವದಲ್ಲಿರುವ ರಚನೆಯನ್ನು ಹೊಸ ಅಥವಾ ಆಧುನೀಕರಿಸುವ (ಸುಧಾರಿಸುವ) ವಿನ್ಯಾಸಗೊಳಿಸುವ ಪ್ರಕ್ರಿಯೆ: ನಿರ್ದಿಷ್ಟ ಸಂಖ್ಯೆಯ ಚಲನೆಗಳು, ಸ್ಥಳೀಯ ಚಲನೆಗಳ ಅನುಪಸ್ಥಿತಿ ಮತ್ತು ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳು, ಕನಿಷ್ಠ ಲಿಂಕ್ಗಳು, ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಬಳಕೆ ಒಂದು ನಿರ್ದಿಷ್ಟ ಪ್ರಕಾರ.
ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯ ಹಂತದಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರವು ರಚನೆಯಾಗುತ್ತದೆ, ಇದು ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ, ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ, ಪ್ರಕಾರ ಮತ್ತು ಚಲನಶೀಲತೆ, ಹಾಗೆಯೇ ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರದಲ್ಲಿ ಪ್ರತಿ ಅನಗತ್ಯ ಸಂಪರ್ಕ ಮತ್ತು ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆಯ ಕಾರ್ಯವಿಧಾನದ ಪರಿಚಯವನ್ನು ಸಮರ್ಥವಾಗಿ ಸಮರ್ಥಿಸಬೇಕು. ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರವನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ ಮುಖ್ಯ ಷರತ್ತುಗಳು ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ನಿಯತಾಂಕಗಳಾಗಿವೆ: ಅಗತ್ಯವಿರುವ ಚಲನೆಗಳ ಸಂಖ್ಯೆ, ಸ್ಥಳೀಯ ಚಲನೆಗಳು ಮತ್ತು ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳ ಅನುಪಸ್ಥಿತಿ, ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು, ನಿರ್ದಿಷ್ಟ ಪ್ರಕಾರದ ಅಥವಾ ವರ್ಗದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಬಳಕೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ನಿರ್ಧರಿಸುವ ಪರಿಸ್ಥಿತಿಗಳು: ನೀಡಿದ ಚಲನೆಯ ಕಾನೂನು ಮತ್ತು ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗಳ ಅಕ್ಷಗಳ ಸ್ಥಳ. ಯಾಂತ್ರಿಕತೆಯ ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗಳ ಅಕ್ಷಗಳು ಸಮಾನಾಂತರವಾಗಿದ್ದರೆ, ನಂತರ ಫ್ಲಾಟ್ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರವನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ. ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗಳ ಅಕ್ಷಗಳು ಛೇದಿಸಿದಾಗ ಅಥವಾ ದಾಟಿದಾಗ, ಬಳಸಿ
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.3. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆ
ಪ್ರಾದೇಶಿಕ ಯೋಜನೆಯನ್ನು ಬಳಸುತ್ತದೆ. ಹೆಚ್ಚಿನ ಸಂದರ್ಭಗಳಲ್ಲಿ, ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯ ಕಾರ್ಯವು ಪ್ರಮಾಣಿತ ರೇಖಾಚಿತ್ರಗಳ ಗುಂಪಿನಿಂದ ಯಾಂತ್ರಿಕತೆಯ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರವನ್ನು ಆಯ್ಕೆಮಾಡಲು ಬರುತ್ತದೆ.
ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ಎಲ್.ವಿ. ಅಸ್ಸೂರ್ನ ರಚನಾತ್ಮಕ ವರ್ಗೀಕರಣಕ್ಕೆ ಅನುಗುಣವಾಗಿ ನಡೆಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 2.3 ನೋಡಿ). ಉದಾಹರಣೆಯಾಗಿ, ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಯಾಂತ್ರಿಕತೆಯ (Fig. 2.6) ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ಪರಿಗಣಿಸಿ.
ಅಕ್ಕಿ. 2.6. ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಯಾಂತ್ರಿಕತೆಯ ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯ ಯೋಜನೆ
ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯ ಮೊದಲ ಕಾರ್ಯದ ಫಲಿತಾಂಶವು ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶೀಲತೆಯು ಏಕತೆಗೆ ಸಮಾನವಾಗಿದೆ ಎಂದು ತೋರಿಸುತ್ತದೆ, ಆದ್ದರಿಂದ, ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನವಾಗಿ ನಾವು ಅನುಗುಣವಾದ ಚಲನಶೀಲತೆಯ ಲಿಂಕ್ಗಳ ಗುಂಪನ್ನು ಆಯ್ಕೆ ಮಾಡುತ್ತೇವೆ, ಅದರ ಲಿಂಕ್ಗಳು ಐದನೆಯ ತಿರುಗುವಿಕೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯನ್ನು ರೂಪಿಸುತ್ತವೆ. ವರ್ಗ (Fig. 2.6, a). ಆಯ್ದ ಪ್ರಾಥಮಿಕ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ನಾವು 2 ನೇ ವಿಧದ 2 ನೇ ಕ್ರಮದ 2 ನೇ ತರಗತಿಯ ಲಿಂಕ್ಗಳ ರಚನಾತ್ಮಕ ಗುಂಪನ್ನು ಲಗತ್ತಿಸುತ್ತೇವೆ (ಚಿತ್ರ 2.6, ಬಿ). ಈ ರೀತಿಯಲ್ಲಿ ಪಡೆದ ಕಾರ್ಯವಿಧಾನವು ತರ್ಕಬದ್ಧ ರಚನೆಯನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಅಂದರೆ, ಅದರ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರವು ರಚನಾತ್ಮಕ ದೋಷಗಳನ್ನು ಹೊಂದಿರುವುದಿಲ್ಲ (ಚಿತ್ರ 2.6, ಸಿ).
ಸೂಕ್ತವಾದ ವರ್ಗ, ಪ್ರಕಾರ ಮತ್ತು ಕ್ರಮದ ಅಗತ್ಯವಿರುವ ಸಂಖ್ಯೆಯ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಅನುಕ್ರಮವಾಗಿ ಸೇರುವ ಮೂಲಕ ಹೆಚ್ಚು ಸಂಕೀರ್ಣವಾದ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರಗಳನ್ನು ಪಡೆಯಬಹುದು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಎಲ್ಲಾ ಇತರ ನಿರ್ದಿಷ್ಟ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸಿದಾಗ ಯಾಂತ್ರಿಕತೆಯ ರಚನೆಯು ತರ್ಕಬದ್ಧವಾಗಿ ಉಳಿಯುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ.
ರಚನಾತ್ಮಕ ಸಂಶ್ಲೇಷಣೆಯ ಹಂತದ ಫಲಿತಾಂಶವು ಅಂಗೀಕೃತ ಮಾನದಂಡಗಳನ್ನು ಪೂರೈಸುವ ಕಾರ್ಯವಿಧಾನದ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರವಾಗಿದೆ.
ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯಾಂತ್ರಿಕ ಲಿಂಕ್ಗಳ ಮೂಲ ಜ್ಯಾಮಿತೀಯ ಆಯಾಮಗಳನ್ನು ಮತ್ತು ಕೆಲಸದ ಮೇಲ್ಮೈ ಪ್ರೊಫೈಲ್ಗಳ ಸಂರಚನೆಗಳನ್ನು ನಿರ್ಧರಿಸುವ ಪ್ರಕ್ರಿಯೆಯು ನಿರ್ದಿಷ್ಟ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಉತ್ತಮವಾಗಿ ಪೂರೈಸುತ್ತದೆ ಮತ್ತು ಗುಣಮಟ್ಟದ ಸೂಚಕಗಳ ಅತ್ಯುತ್ತಮ ಸಂಯೋಜನೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯ ಉದ್ದೇಶಗಳು:
1) ಇನ್ಪುಟ್ ಅಥವಾ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ನಿಗದಿತ ಸ್ಥಾನಗಳ ಆಧಾರದ ಮೇಲೆ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಸಂಶ್ಲೇಷಣೆ;
2) ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಜ್ಯಾಮಿತೀಯ ನಿಯತಾಂಕಗಳ ಪ್ರಕಾರ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಸಂಶ್ಲೇಷಣೆ;
3) ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯ ನಿರ್ದಿಷ್ಟ ಕಾನೂನಿನ ಪ್ರಕಾರ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಸಂಶ್ಲೇಷಣೆ;
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.3. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆ
4) ನೀಡಿರುವ ಚಲನಶಾಸ್ತ್ರದ ನಿಯತಾಂಕಗಳ ಪ್ರಕಾರ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಸಂಶ್ಲೇಷಣೆ: ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸರಾಸರಿ ವೇಗ, ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ಗುಣಾಂಕ;
5) ಒತ್ತಡದ ಕೋನ ಅಥವಾ ಪ್ರಸರಣ ಕೋನದ ನಿರ್ದಿಷ್ಟ ಮೌಲ್ಯವನ್ನು ಆಧರಿಸಿ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಸಂಶ್ಲೇಷಣೆ.
ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯ ಸಮಸ್ಯೆಗಳಿಗೆ ಪರಿಹಾರವೆಂದರೆ ಸಂಶ್ಲೇಷಣೆಯ ಎರಡೂ ಹಂತಗಳ ಮಾನದಂಡಗಳನ್ನು ಪೂರೈಸುವ ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರವಾಗಿದೆ.
ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರ- ಇದು ಯಾಂತ್ರಿಕತೆಯ ಗ್ರಾಫಿಕ್ ಪ್ರಾತಿನಿಧ್ಯವಾಗಿದ್ದು, GOST ನಿಂದ ಶಿಫಾರಸು ಮಾಡಲಾದ ಚಿಹ್ನೆಗಳನ್ನು ಬಳಸಿಕೊಂಡು ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದ ಅಂಶದಲ್ಲಿ ಮಾಡಲ್ಪಟ್ಟಿದೆ.
ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರವು ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಅವು ನಿರ್ವಹಿಸುವ ಚಲನೆಗಳ ಪ್ರಕಾರ, ಚಲನಶೀಲತೆಯ ಸಂಖ್ಯೆ ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ವರ್ಗ, ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಪ್ರಕಾರ ಮತ್ತು ಲಿಂಕ್ಗಳ ಆಯಾಮಗಳ ಬಗ್ಗೆ ಮಾಹಿತಿಯನ್ನು ಒಳಗೊಂಡಿದೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುವಾಗ, ಅವುಗಳನ್ನು ಈ ಕೆಳಗಿನ ಮಾನದಂಡಗಳಿಂದ ಮಾರ್ಗದರ್ಶನ ಮಾಡಲಾಗುತ್ತದೆ:
1) ಲಿಂಕ್ಗಳ ತಿರುಗುವಿಕೆಯ ಸ್ಥಿತಿ - ವಿನ್ಯಾಸಗೊಳಿಸಿದ ಕಾರ್ಯವಿಧಾನವು ಇನ್ಪುಟ್ ಅಥವಾ ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗಳನ್ನು ತಿರುಗಿಸುವ ಸಾಧ್ಯತೆಯನ್ನು ಒದಗಿಸಬೇಕು
360 ° ಕ್ಕಿಂತ ಹೆಚ್ಚು ಕೋನದಲ್ಲಿ ಗೇಟ್ಸ್;
2) ಯಾಂತ್ರಿಕತೆಯ ಆಯಾಮಗಳ ಮೇಲೆ ವಿನ್ಯಾಸ ನಿರ್ಬಂಧಗಳು - ವಿನ್ಯಾಸಗೊಳಿಸಿದ ಕಾರ್ಯವಿಧಾನವು ನಿಗದಿತ ವ್ಯಾಪ್ತಿಯೊಳಗೆ ಹೊಂದಿಕೊಳ್ಳುವ ಒಟ್ಟಾರೆ ಆಯಾಮಗಳನ್ನು ಹೊಂದಿರಬೇಕು;
3) ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಚಲನೆಯ ನಿಯಮ ಅಥವಾ ಕಾರ್ಯವಿಧಾನದ ಲಿಂಕ್ಗಳ ನಿರ್ದಿಷ್ಟ ಸ್ಥಾನಗಳನ್ನು ಖಾತ್ರಿಪಡಿಸುವ ನಿಖರತೆ - ವಿನ್ಯಾಸಗೊಳಿಸಿದ ಕಾರ್ಯವಿಧಾನವು ನಿಗದಿತ ಚಲನೆಯ ನಿಯಮ ಅಥವಾ ಲಿಂಕ್ಗಳ ನಿರ್ದಿಷ್ಟ ಸ್ಥಾನಗಳನ್ನು ಅಗತ್ಯವಿರುವ ನಿಖರತೆಯೊಂದಿಗೆ ಪೂರೈಸುವುದನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು;
4) ಬಲದ ಅಂಶಗಳ ವರ್ಗಾವಣೆಯ ಪರಿಸ್ಥಿತಿಗಳ ಮೇಲಿನ ಮಿತಿ - ವಿನ್ಯಾಸಗೊಳಿಸಿದ ಕಾರ್ಯವಿಧಾನದ ಒತ್ತಡದ ಕೋನದ ಪ್ರಸ್ತುತ ಮೌಲ್ಯವು ಅನುಮತಿಸುವ ಮೌಲ್ಯವನ್ನು ಮೀರಬಾರದು;
5) ಕಾರ್ಯವಿಧಾನದ ಕಾರ್ಯ ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯ ನಿಶ್ಚಿತಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವ ಇತರ ಷರತ್ತುಗಳು ಮತ್ತು ಅವಶ್ಯಕತೆಗಳು.
TO ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆಯ ವಿಧಾನಗಳು ವಿಶ್ಲೇಷಣೆಯ ವಿಧಾನಗಳಿಂದ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ಒಳಗೊಂಡಿವೆ
ಮತ್ತು ನೇರ ಸಂಶ್ಲೇಷಣೆಯ ವಿಧಾನಗಳು (ವಿಶ್ಲೇಷಣಾತ್ಮಕ, ಚಿತ್ರಾತ್ಮಕ ಮತ್ತು ಗ್ರಾಫಿಕ್-ವಿಶ್ಲೇಷಣಾತ್ಮಕ).
ಗ್ರಾಫಿಕ್-ವಿಶ್ಲೇಷಣಾತ್ಮಕ ವಿಧಾನಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಕಾರ್ಯವಿಧಾನಗಳ ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯನ್ನು ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದ ಅಂಶದಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ.
ಸ್ಕೇಲ್ ಫ್ಯಾಕ್ಟರ್- ಇದು ಯಾವುದೇ ನೈಜ ಸಂಬಂಧವಾಗಿದೆ-
ಕೊಟ್ಟಿರುವ ಮೌಲ್ಯ l, ಮೀಟರ್ಗಳಲ್ಲಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ, ವಿಭಾಗದ ಉದ್ದಕ್ಕೆ l, ಮಿಲಿಮೀಟರ್ಗಳಲ್ಲಿ ಅಳೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ಈ ಮೌಲ್ಯವನ್ನು ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದ ಭಾಗವಾಗಿ ಚಿತ್ರಿಸುತ್ತದೆ.
ಉದ್ದದ ಪ್ರಮಾಣವು ಮಿಲಿಮೀಟರ್ಗಳಲ್ಲಿ ಯಾವುದೇ ಮೌಲ್ಯವನ್ನು ಮೀಟರ್ನಲ್ಲಿನ ನಿಜವಾದ ಮೌಲ್ಯಕ್ಕೆ ಚಿತ್ರಿಸುವ ವಿಭಾಗದ ಉದ್ದದ ಅನುಪಾತವಾಗಿದೆ.
ಪ್ರಮಾಣವು ಪ್ರಮಾಣಿತ ಪ್ರಮಾಣವಾಗಿದೆ, ಅದರ ಮೌಲ್ಯಗಳನ್ನು GOST ನ ನಿಬಂಧನೆಗಳಿಂದ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ. "ಎಂಜಿನಿಯರಿಂಗ್ ಗ್ರಾಫಿಕ್ಸ್" ಶಿಸ್ತಿನ ನಿಬಂಧನೆಗಳಿಂದ ಇದು ನಿಜವಾದ ಪ್ರಮಾಣವಾಗಿದೆ ಎಂದು ತಿಳಿದುಬಂದಿದೆ
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |

2. ಲಿವರ್ ಗೇರ್ಸ್
2.3. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆ
1×1 ಧರಿಸಿ, ಮತ್ತು ಹಿಗ್ಗುವಿಕೆ ಮಾಪಕಗಳು ಮತ್ತು ಕಡಿತ ಮಾಪಕಗಳ ಸರಣಿಗಳಿವೆ. ಸ್ಕೇಲ್ ಅಂಶವು ಸ್ಕೇಲ್ನ ಪರಸ್ಪರ ಮತ್ತು ಪ್ರಮಾಣಿತ ಮೌಲ್ಯವಲ್ಲ. ಅಗತ್ಯವಿರುವ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುವ ನಿರ್ದಿಷ್ಟ ಷರತ್ತುಗಳು ಮತ್ತು ಗುರಿಗಳನ್ನು ಅವಲಂಬಿಸಿ ಪ್ರಮಾಣದ ಅಂಶದ ಮೌಲ್ಯಗಳನ್ನು ನಿರಂಕುಶವಾಗಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.
μl =OA l OA,
ಇಲ್ಲಿ l OA ಕ್ರ್ಯಾಂಕ್ನ ನಿಜವಾದ ಉದ್ದವಾಗಿದೆ; OA ಒಂದು ಅನಿಯಂತ್ರಿತ ವಿಭಾಗವಾಗಿದೆ.
2.4 ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂಗಳ ಗುಣಮಟ್ಟ ಸೂಚಕಗಳು
ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯ ನಿರ್ಬಂಧಗಳು ಮತ್ತು ಷರತ್ತುಗಳು ಗುಣಮಟ್ಟದ ಸೂಚಕಗಳ ಮೌಲ್ಯಗಳನ್ನು ರೂಪಿಸುತ್ತವೆ, ಅದರ ಸಹಾಯದಿಂದ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಗುಣಮಟ್ಟವನ್ನು ನಿರ್ಣಯಿಸಲಾಗುತ್ತದೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಗುಣಾತ್ಮಕ ಸೂಚಕಗಳು: ದಕ್ಷತೆ η;
ಯಾಂತ್ರಿಕ ಸ್ಟ್ರೋಕ್ ಎಚ್;
ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ಗುಣಾಂಕ k; ಒತ್ತಡದ ಕೋನ; ಪ್ರಸರಣ ಕೋನμ.
ದಕ್ಷತೆη ಒಂದು ಆಯಾಮವಿಲ್ಲದ ಪ್ರಮಾಣ, ha-
ಯಾಂತ್ರಿಕತೆಯಿಂದ ಉಪಯುಕ್ತವಾಗಿ ಬಳಸಲಾಗುವ ಒಟ್ಟು ಶಕ್ತಿಯ ಪ್ರಮಾಣವನ್ನು ನಿರೂಪಿಸುತ್ತದೆ. § 1.4 ರಲ್ಲಿ ಗಮನಿಸಿದಂತೆ, ಯಾಂತ್ರಿಕತೆಯ ದಕ್ಷತೆಯು ಯಾವಾಗಲೂ ಒಂದಕ್ಕಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಚಲನೆಯ ರೂಪಾಂತರದ ಪ್ರಕ್ರಿಯೆಯು ಚಲನಶೀಲ ಜೋಡಿಗಳಲ್ಲಿ ಘರ್ಷಣೆಯ ಉಪಸ್ಥಿತಿಯಿಂದ ಉಂಟಾಗುವ ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ನಷ್ಟಗಳೊಂದಿಗೆ ಇರುತ್ತದೆ. ದಕ್ಷತೆಯ ಮೌಲ್ಯವು ಏಕತೆಗೆ ಹತ್ತಿರವಾಗಿದೆ, ಕಡಿಮೆ ನಷ್ಟಗಳು, ಆದ್ದರಿಂದ, ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಗುಣಮಟ್ಟವು ಹೆಚ್ಚಾಗುತ್ತದೆ.
ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಕೆಲಸದ ಪ್ರದೇಶವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯ ವ್ಯಾಪ್ತಿಯಿಂದ ನಿರ್ಣಯಿಸಲಾಗುತ್ತದೆ, ಇದನ್ನು ಯಾಂತ್ರಿಕತೆಯ ಸ್ಟ್ರೋಕ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಕಾರ್ಯವಿಧಾನದ ಸ್ಟ್ರೋಕ್ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ಸ್ಥಾನಗಳ ನಡುವಿನ ಅಂತರವಾಗಿದೆ.
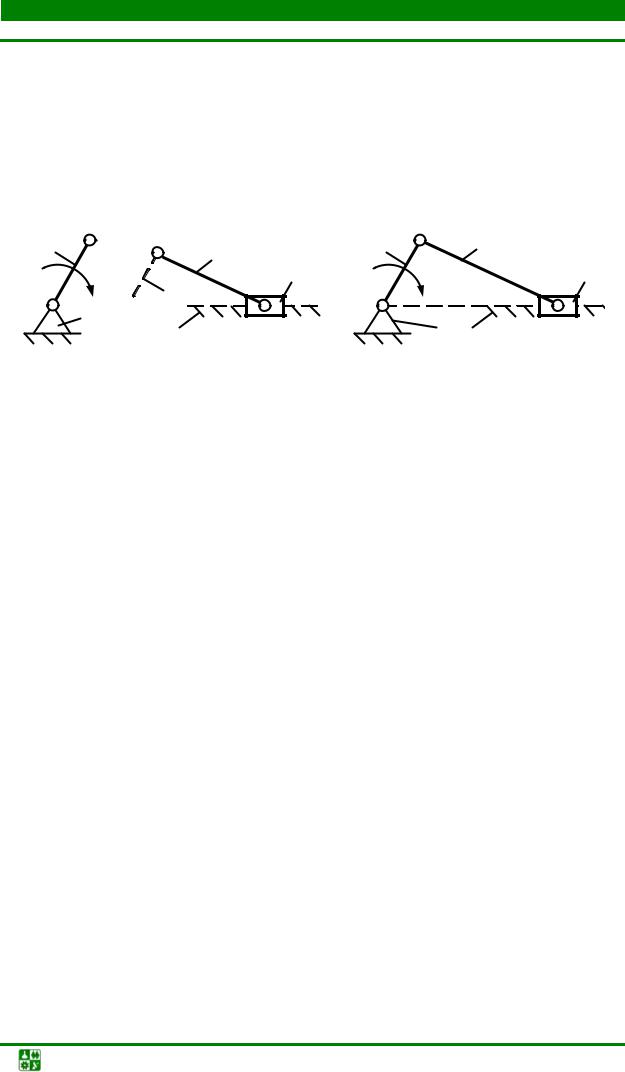
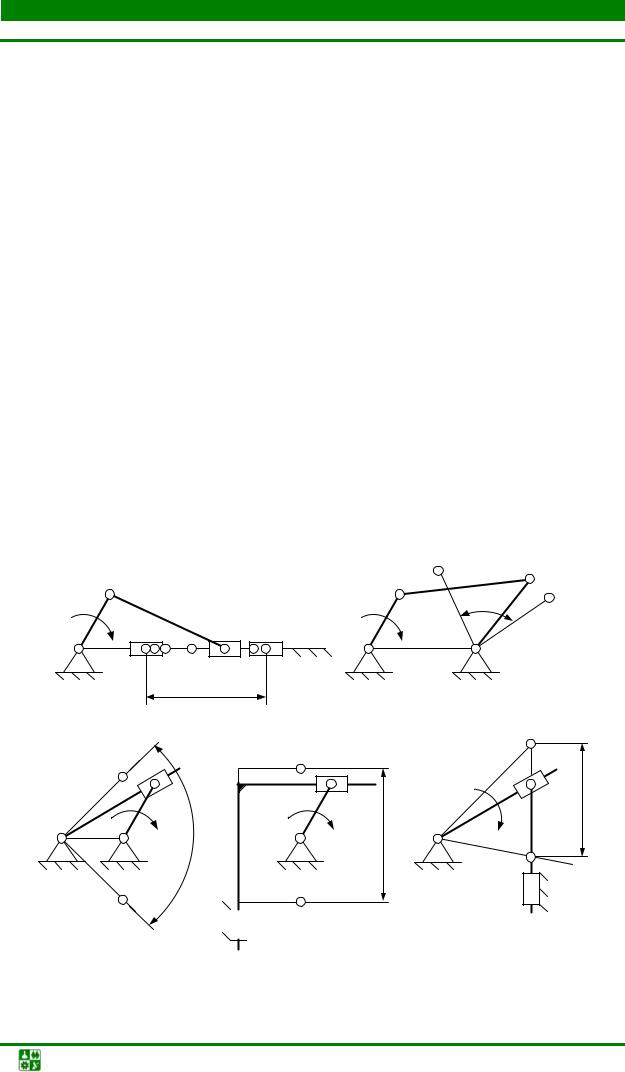
ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ (Fig. 2.7, a), ಸೈನ್ (Fig. 2.7, d) ಮತ್ತು ಸ್ಪರ್ಶಕ (Fig. 2.7, d) ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ, ಈ ನಿಯತಾಂಕದ ವ್ಯಾಖ್ಯಾನದ ಪ್ರಕಾರ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ ಮತ್ತು ಹಿಂಗ್ಡ್ (Fig. 2.7) , b) ಮತ್ತು ರಾಕರ್ (Fig. 2.7, c) ಕಾರ್ಯವಿಧಾನಗಳು, ಈ ನಿಯತಾಂಕದ ಮೌಲ್ಯವನ್ನು ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ಕಂಡುಹಿಡಿಯಬಹುದು
ಎನ್ = ψ ಎಲ್,
ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಯಂತ್ರಗಳ ಸಿದ್ಧಾಂತ. ಪಠ್ಯಪುಸ್ತಕ ಭತ್ಯೆ |
2. ಲಿವರ್ ಗೇರ್ಸ್
2.4.
ಅಲ್ಲಿ l ,ψ – ಉದ್ದ ಮತ್ತು ಕೋನ, ರಾಡ್, ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಸ್ಪ್ಯಾನ್.
ರಾಕರ್ ತೋಳಿನ ಸ್ವಿಂಗ್ ಕೋನಅಥವಾ ರಾಕರ್ ψ ಎಂಬುದು ರಾಕರ್ ಆರ್ಮ್ ಅಥವಾ ರಾಕರ್ನ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ಸ್ಥಾನಗಳ ನಡುವಿನ ಕೋನವಾಗಿದೆ (ಚಿತ್ರ 2.7, ಬಿ, ಸಿ).
ಹೆಚ್ಚಿನ ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಕಾರ್ಯಾಚರಣೆಯ ಆವರ್ತಕ ಸ್ವರೂಪವನ್ನು ಹೊಂದಿವೆ, ಅಂದರೆ, ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಯ ನಂತರ, ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ ಸಂಭವಿಸುವ ಎಲ್ಲಾ ಪ್ರಕ್ರಿಯೆಗಳು ಪುನರಾವರ್ತನೆಯಾಗುತ್ತವೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಯಾವುದೇ ಕಾರ್ಯವಿಧಾನದ ಕಾರ್ಯಾಚರಣೆಯ ಚಕ್ರವನ್ನು ಕೆಲಸ ಮತ್ತು ನಿಷ್ಕ್ರಿಯ ಹಂತಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ. ಪವರ್ ಸ್ಟ್ರೋಕ್ ಹಂತದಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯ ಸೇವಾ ಉದ್ದೇಶವನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ, ಮತ್ತು ಐಡಲ್ ಹಂತವು ಚಲನೆಯ ಚಕ್ರವನ್ನು ಪೂರ್ಣಗೊಳಿಸಲು ಮತ್ತು ಲಿಂಕ್ಗಳ ಕೆಲಸದ ಮೇಲ್ಮೈಗಳಿಂದ ಉಳಿದಿರುವ ಒತ್ತಡಗಳನ್ನು ನಿವಾರಿಸಲು ಉದ್ದೇಶಿಸಲಾಗಿದೆ. ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ಗುಣಾಂಕವನ್ನು ಬಳಸಿಕೊಂಡು ಕೆಲಸ ಮಾಡುವ ಮತ್ತು ಐಡಲಿಂಗ್ ಸ್ಟ್ರೋಕ್ಗಳ ಸಮಯದ ಅನುಪಾತವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ನಿರ್ಣಯಿಸಲಾಗುತ್ತದೆ.
ಸರಾಸರಿ ವೇಗ ಅಸಮಾನತೆಯ ಗುಣಾಂಕ ಗುಣಾಂಕವಾಗಿದೆ
ನಿಷ್ಕ್ರಿಯ ಸಮಯದ T x.x ಮತ್ತು ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ ಸಮಯ T r.x ಗೆ ಅನುಪಾತವನ್ನು ನಿರೂಪಿಸುತ್ತದೆ:
ಟಿ x.x | |||||
ಅಲ್ಲಿ θ ಎನ್ನುವುದು ಯಾಂತ್ರಿಕತೆಯ ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ಸ್ಥಾನಗಳ ನಡುವಿನ ಕೋನವಾಗಿದೆ.
ಎ, ಬಿ | ಎ, ಬಿ | ಎ, ಬಿ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
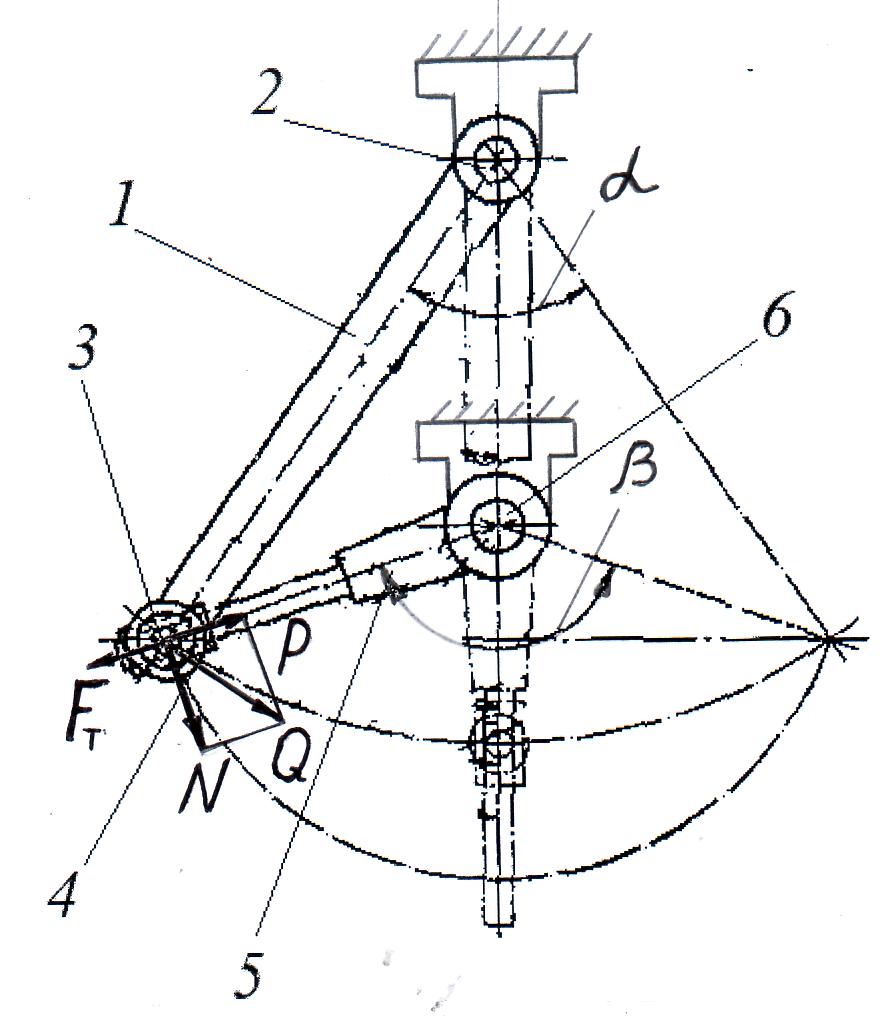
ಅಕ್ಕಿ. 2.8 ವಿಶಿಷ್ಟ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಒತ್ತಡದ ಕೋನಗಳನ್ನು ನಿರ್ಧರಿಸುವ ಯೋಜನೆಗಳು ಫ್ಲಾಟ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಲಿಂಕ್ಗಳ ನಡುವಿನ ಬಲದ ಅಂಶಗಳ ಪ್ರಸರಣದ ಗುಣಮಟ್ಟವನ್ನು ನಿರ್ಣಯಿಸಲು, ಒತ್ತಡದ ಕೋನ ϑ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಒತ್ತಡದ ಕೋನವು ಸಕ್ರಿಯ ಬಲ ವೆಕ್ಟರ್ P a ನಡುವಿನ ತೀವ್ರ ಕೋನವಾಗಿದೆ, ಹಿಂದಿನ ಲಿಂಕ್ನ ಬದಿಯಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಮತ್ತು ಅದರ ಅನ್ವಯದ ಬಿಂದುವಿನ ವೇಗ ವೆಕ್ಟರ್ (Fig. 2.8). ಒತ್ತಡದ ಕೋನದ ಮೌಲ್ಯವು ಲಿಂಕ್ಗಳ ನಡುವೆ ಬಲಗಳ ವರ್ಗಾವಣೆಯ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ರೂಪಿಸುತ್ತದೆ, ಯಾಂತ್ರಿಕತೆಯ ಚಾಲನಾ ಶಕ್ತಿಯ ಪ್ರಮಾಣವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ Q: Q = P a cos(ϑ) . ಅಭಿವ್ಯಕ್ತಿಯ ವಿಶ್ಲೇಷಣೆಯಿಂದ ಒತ್ತಡದ ಕೋನದ ಮೌಲ್ಯದಲ್ಲಿನ ಇಳಿಕೆಯು ಚಾಲನಾ ಶಕ್ತಿಯ ಮೌಲ್ಯದಲ್ಲಿ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಒತ್ತಡದ ಕೋನದಲ್ಲಿನ ಹೆಚ್ಚಳವು ಈ ಬಲವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ, ಒತ್ತಡದ ಕೋನವು ಯಾವಾಗಲೂ ϑ ≤ 90 ° ಆಗಿರುತ್ತದೆ. ಒತ್ತಡದ ಕೋನ ϑ > 90° ಆಗಿರುವಾಗ, ಯಾಂತ್ರಿಕತೆಗಳಲ್ಲಿ ಜ್ಯಾಮಿಂಗ್ ಅಥವಾ ಸ್ವಯಂ-ಬ್ರೇಕಿಂಗ್ ಸಂಭವಿಸಬಹುದು. ಸ್ವಯಂ-ಬ್ರೇಕಿಂಗ್, ಅಥವಾ ಜ್ಯಾಮಿಂಗ್, ಇದು ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಿತಿಯಾಗಿದೆ ಒತ್ತಡದ ಕೋನಗಳ ಮೌಲ್ಯಗಳೊಂದಿಗೆ ಲಿಂಕ್ಗಳು ಯಾವುದೇ ಅನಿಯಂತ್ರಿತವಾಗಿ ದೊಡ್ಡ ಮೌಲ್ಯದಲ್ಲಿ ಚಲಿಸಲು ಅಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಅಂತಹ ಸಂದರ್ಭಗಳನ್ನು ತೊಡೆದುಹಾಕಲು, ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಸಂಶ್ಲೇಷಿಸುವಾಗ, ಒತ್ತಡದ ಕೋನಗಳ ಅನುಮತಿಸುವ ಮೌಲ್ಯಗಳನ್ನು [ϑ] ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ, ಈ ಕೆಳಗಿನ ಶಿಫಾರಸುಗಳಿಂದ ಮಾರ್ಗದರ್ಶಿಸಲಾಗುತ್ತದೆ: ಕೊಂಡಿಗಳು ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಮಾತ್ರ ರೂಪಿಸುವ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ, ಅನುಮತಿಸುವ ಒತ್ತಡದ ಕೋನವು ವ್ಯಾಪ್ತಿಯಲ್ಲಿರುತ್ತದೆ.
2. ಲಿವರ್ ಗೇರ್ಸ್ 2.4. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಗುಣಾತ್ಮಕ ಸೂಚಕಗಳು [ϑ ] = 45− 60°, ಮತ್ತು ಪರಿಭ್ರಮಣ ಮತ್ತು ಅನುವಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಯೋಜನೆಯನ್ನು ಹೊಂದಿರುವ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ, [ϑ ] = 30− 45°. ಒತ್ತಡದ ಕೋನ ಮೌಲ್ಯಗಳಲ್ಲಿ [ϑ ] = 90 °, ಯಾಂತ್ರಿಕತೆಯು "ಡೆಡ್" ಸ್ಥಾನಗಳಲ್ಲಿದೆ, ಇದು ಸ್ಟ್ಯಾಟಿಕ್ಸ್ನಲ್ಲಿ ಲಿಂಕ್ಗಳ ಜ್ಯಾಮಿಂಗ್ಗೆ ಕಾರಣವಾಗುತ್ತದೆ; ಚಲನೆಯಲ್ಲಿ (ಡೈನಾಮಿಕ್ಸ್), ಯಾಂತ್ರಿಕತೆಯು ಅಂತಹ ಸ್ಥಾನಗಳನ್ನು ಮೀರಿಸುತ್ತದೆ ಚಲನ ಶಕ್ತಿಯ ಹೆಚ್ಚುವರಿ ಪರಿಮಾಣ. ಹಿಂಜ್ ಯಾಂತ್ರಿಕತೆಯ ಗುಣಮಟ್ಟವನ್ನು ನಿರ್ಣಯಿಸಲು, ಒತ್ತಡದ ಕೋನದ ಜೊತೆಗೆ, ಪ್ರಸರಣ ಕೋನ μ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ (Fig. 2.8, b). ಪ್ರಸರಣ ಕೋನವು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಮತ್ತು ಹಿಂಜ್ ಯಾಂತ್ರಿಕತೆಯ ರಾಕರ್ ತೋಳಿನ ಅಕ್ಷಗಳ ಸಂಬಂಧಿತ ಸ್ಥಾನವನ್ನು ನಿರ್ಧರಿಸುವ ಕೋನವಾಗಿದೆ. ಪ್ರಸರಣ ಕೋನಗಳು ಮತ್ತು ಒತ್ತಡದ ಮೌಲ್ಯಗಳು ಪರಸ್ಪರ ಸಂಬಂಧ ಹೊಂದಿವೆ: ϑ+μ =90°. ಒತ್ತಡದ ಕೋನದಲ್ಲಿನ ಹೆಚ್ಚಳವು ಪ್ರಸರಣ ಕೋನದಲ್ಲಿ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ಪ್ರಸರಣ ಕೋನದ ಮೌಲ್ಯಗಳಲ್ಲಿನ ಹೆಚ್ಚಳವು ಒತ್ತಡದ ಕೋನದಲ್ಲಿ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ ಎಂದು ಅಭಿವ್ಯಕ್ತಿಯ ವಿಶ್ಲೇಷಣೆ ತೋರಿಸುತ್ತದೆ. ಒತ್ತಡ ಮತ್ತು ಪ್ರಸರಣ ಕೋನಗಳ ಮೌಲ್ಯಗಳಲ್ಲಿ ಏಕಕಾಲಿಕ ಹೆಚ್ಚಳ ಅಥವಾ ಇಳಿಕೆ ಅಸಾಧ್ಯ. ಒಂದು ಕೋನವು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾದಾಗ, ಎರಡನೇ ಕೋನದ ಮೌಲ್ಯವು ಗರಿಷ್ಠವನ್ನು ತಲುಪುತ್ತದೆ, ಅಂದರೆ 90 ° ..
|
ಮುನ್ನಡೆಸುತ್ತಿದೆಲಿಂಕ್ ಎನ್ನುವುದು ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಕೆಲಸವು ಧನಾತ್ಮಕವಾಗಿರುವ ಲಿಂಕ್ ಆಗಿದೆ, ಗುಲಾಮ- ಋಣಾತ್ಮಕ ಅಥವಾ ಶೂನ್ಯಕ್ಕೆ ಸಮ.
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 13.2 ನಾಲ್ಕು-ಜಂಟಿ ಯಾಂತ್ರಿಕತೆಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಇನ್ಪುಟ್ ಲಿಂಕ್ಗೆ 1 ಈ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ಚಾಲನೆಯ ಕ್ಷಣವನ್ನು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ ಎಂ ಡಿ , ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗೆ 3 - ಪ್ರತಿರೋಧದ ಕ್ಷಣ ಎಂ c3. ವಿನ್ಯಾಸ ಹಂತದಲ್ಲಿ, ಅಂಜೂರದಲ್ಲಿನ ಲಿಂಕ್ಗಳ ದ್ರವ್ಯರಾಶಿಗಳು ಮತ್ತು ಜಡತ್ವದ ಕ್ಷಣಗಳು. 13.2 ಅನ್ನು ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ, ಆದ್ದರಿಂದ ಚಾಲಿತ ಲಿಂಕ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಚಾಲನಾ ಶಕ್ತಿಯು ಪ್ರತಿಕ್ರಿಯೆಯಾಗಿದೆ ಎಫ್ 32 ರೇಖೆಯ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲಾಗಿದೆ ಸೂರ್ಯ , ಲಿಂಕ್ನಲ್ಲಿ ಅದರ ಅಪ್ಲಿಕೇಶನ್ ಪಾಯಿಂಟ್ನ ವೇಗ 3 - ವಿ ಸಿ ಗೆ ಕಳುಹಿಸಲಾಗಿದೆ ಬದಿ 3 ಲಿಂಕ್ಗೆ ಲಂಬವಾಗಿ 3 . ಮೂಲೆ 32 ವಾಹಕಗಳ ನಡುವೆ ಎಫ್ 32 ಮತ್ತು ವಿ ಸಿ - ತಿರುಗುವ ಜೋಡಿಯಲ್ಲಿ ಒತ್ತಡದ ಕೋನ ಜೊತೆಗೆ . ಈ ಕೋನವು ಹೆಚ್ಚಾದಂತೆ, ಬಲದ ಸ್ಪರ್ಶಕ ಅಂಶ ಎಫ್ ಟಿ 32 , ಲಿಂಕ್ ತಿರುಗುವಿಕೆಯನ್ನು ಉತ್ತೇಜಿಸುವುದು 3 ದಿಕ್ಕಿನಲ್ಲಿ 3 , ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಮತ್ತು ಸಾಮಾನ್ಯ ಎಫ್ ಎನ್ 32 , ಇದು ಚಲನೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವುದಿಲ್ಲ, ಆದರೆ ಲಿಂಕ್ ಅನ್ನು ಮಾತ್ರ ವಿರೂಪಗೊಳಿಸುತ್ತದೆ (ಸಂಕುಚಿತಗೊಳಿಸುತ್ತದೆ). 3 , ಹೆಚ್ಚಾಗುತ್ತದೆ. ಅಂದರೆ, ಒತ್ತಡದ ಕೋನದಲ್ಲಿ ಹೆಚ್ಚಳದೊಂದಿಗೆ, ಗೇರ್ಬಾಕ್ಸ್ನಲ್ಲಿ ಬಲಗಳ ಪ್ರಸರಣಕ್ಕೆ ಪರಿಸ್ಥಿತಿಗಳು ಹದಗೆಡುತ್ತವೆ. ನೈಜ ಗೇರ್ಬಾಕ್ಸ್ಗಳಲ್ಲಿ ಯಾವಾಗಲೂ ಘರ್ಷಣೆ ಇರುವುದರಿಂದ, ಗೇರ್ಬಾಕ್ಸ್ನಲ್ಲಿನ ಒತ್ತಡದ ಕೋನದ ನಿರ್ದಿಷ್ಟ ಮೌಲ್ಯದಲ್ಲಿ ಸ್ವಯಂ-ಬ್ರೇಕಿಂಗ್ ಅಥವಾ ಜ್ಯಾಮಿಂಗ್ ಸಾಧ್ಯ.
ಸ್ವಯಂ-ಲಾಕಿಂಗ್ ಅಥವಾ ಜ್ಯಾಮಿಂಗ್- ಗೇರ್ಬಾಕ್ಸ್ಗಳಲ್ಲಿ ಒಂದರಲ್ಲಿ ಒತ್ತಡದ ಕೋನಗಳನ್ನು ಹೆಚ್ಚಿಸುವ ಪರಿಣಾಮವಾಗಿ, ಚಾಲನಾ ಶಕ್ತಿಯ ನಿರಂಕುಶವಾಗಿ ದೊಡ್ಡ ಮೌಲ್ಯದೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆಯ ಚಲನೆಯು ಅಸಾಧ್ಯವಾದಾಗ ಇದು ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಿತಿಯಾಗಿದೆ. ಆಗಾಗ್ಗೆ, ಬಲ ಪ್ರಸರಣದ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ನಿರೂಪಿಸಲು, ಬಲ ಹೆಚ್ಚಳದ ಗುಣಾಂಕವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ (ಘರ್ಷಣೆಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳದೆ)
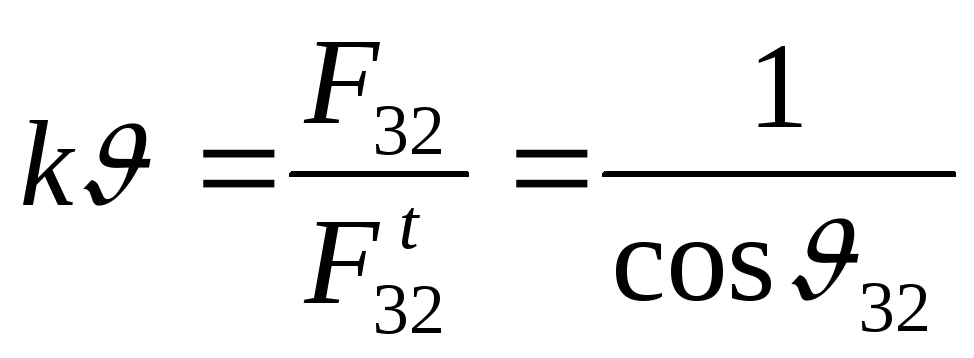
|
|

ನೈಜ ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ ಯಾವಾಗಲೂ ಘರ್ಷಣೆ ಇರುವುದರಿಂದ, ಒತ್ತಡದ ಕೋನಗಳಲ್ಲಿ ಜ್ಯಾಮಿಂಗ್ ಸಂಭವಿಸುತ್ತದೆ < 90 . ಲೆಕ್ಕಾಚಾರ ಮಾಡುವಾಗ, ಬಲ ಹೆಚ್ಚಳದ ಗುಣಾಂಕವನ್ನು ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ (ಉದಾಹರಣೆಗೆ ಕೆ = 2 ) ಮತ್ತು ಅನುಮತಿಸುವ ಒತ್ತಡದ ಕೋನವನ್ನು ನಿರ್ಧರಿಸಿ [ ] . ಪ್ರಾಥಮಿಕ ಲೆಕ್ಕಾಚಾರಗಳಿಗೆ ಇದು ತಿರುಗುವ ಜೋಡಿಗಳೊಂದಿಗೆ ಮಾತ್ರ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಅಂಗೀಕರಿಸಲ್ಪಟ್ಟಿದೆ [ ] = 45 - 60 , ಪ್ರಗತಿಶೀಲ ನಿಯಂತ್ರಣ ಬಿಂದುಗಳ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ [ ] = 30 - 45 . ಯಾಂತ್ರಿಕತೆಯ "ಸತ್ತ" ಸ್ಥಾನಗಳು ಎಂದು ಕರೆಯಲ್ಪಡುವಲ್ಲಿ, ಒತ್ತಡದ ಕೋನಗಳು ಎಂದು ಗಮನಿಸಬೇಕು = 90 . ಸ್ಥಿರ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯು ಈ ಸ್ಥಾನದಲ್ಲಿ ಜಾಮ್ ಆಗಬಹುದು; ಡೈನಾಮಿಕ್ಸ್ನಲ್ಲಿ, ಚಲಿಸುವ ಲಿಂಕ್ಗಳಿಂದ ಸಂಗ್ರಹವಾಗಿರುವ ಚಲನ ಶಕ್ತಿಯನ್ನು ಬಳಸಿಕೊಂಡು ಯಾಂತ್ರಿಕತೆಯು ಈ ಸ್ಥಾನಗಳ ಮೂಲಕ ಚಲಿಸುತ್ತದೆ.
ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ಗುಣಾಂಕದ ಪರಿಕಲ್ಪನೆ
ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ಗುಣಾಂಕ ಕೆ ರಿಟರ್ನ್ ಸ್ಟ್ರೋಕ್ನಲ್ಲಿ ಅದರ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸರಾಸರಿ ವೇಗದ ಅನುಪಾತವಾಗಿದೆ 3 ವಾಡ್ ಓಹ್ ಮತ್ತು ನೇರವಾಗಿ ಮುಂದೆ 3ವಾ
|
|
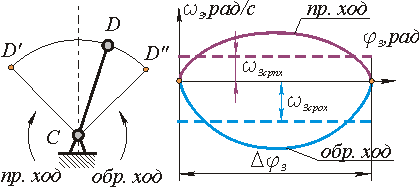
ಎಲ್ಲಿ 

ಟಿ ಓಹ್ ಮತ್ತು ಟಿ ph - ಕ್ರಮವಾಗಿ ರಿವರ್ಸ್ ಸಮಯ ಮತ್ತು ಫಾರ್ವರ್ಡ್ ಸಮಯ.
ಕೆಲಸ ಅಥವಾ ಫಾರ್ವರ್ಡ್ ಸ್ಟ್ರೋಕ್ನಲ್ಲಿನ ಕಾರ್ಯವಿಧಾನದ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನಲ್ಲಿನ ಹೊರೆ ಐಡಲ್ ಅಥವಾ ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ನಲ್ಲಿರುವ ಲೋಡ್ಗಿಂತ ಹೆಚ್ಚಿರುವ ತಾಂತ್ರಿಕ ಯಂತ್ರಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ, ಫಾರ್ವರ್ಡ್ ಸ್ಟ್ರೋಕ್ನಲ್ಲಿ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ವೇಗ ಕಡಿಮೆ ಇರುವುದು ಅಪೇಕ್ಷಣೀಯವಾಗಿದೆ. ರಿವರ್ಸ್ ಒಂದಕ್ಕಿಂತ. ಐಡಲ್ ಸಮಯವನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುವುದು ಸಹ ಅಗತ್ಯವಾಗಿದೆ. ಆದ್ದರಿಂದ, ಯಾಂತ್ರಿಕತೆಯನ್ನು ಮೆಟ್ರಿಕ್ ಆಗಿ ಸಂಶ್ಲೇಷಿಸುವಾಗ, ಸರಾಸರಿ ವೇಗದ ಅಸಮಾನತೆಯ ನಿರ್ದಿಷ್ಟ ಗುಣಾಂಕವನ್ನು ಒದಗಿಸುವ ಲಿಂಕ್ ಗಾತ್ರಗಳನ್ನು ಆಯ್ಕೆಮಾಡುವುದು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ.
ಅಲಿಯುಶಿನ್ ಯು.ಎ.
ಹಿಂಗ್ಡ್ ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂಗಳ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆ
(ಮೂಲ ಪರಿಕಲ್ಪನೆಗಳು ಮತ್ತು ಸ್ವತಂತ್ರ ಕೆಲಸ ಮಾಡುವ ಉದಾಹರಣೆ)
ಹಿಂಗ್ಡ್-ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಅಧ್ಯಯನವು ರಚನಾತ್ಮಕ, ಚಲನಶಾಸ್ತ್ರ ಮತ್ತು ಕ್ರಿಯಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ. ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯು ಚಲಿಸುವ ಲಿಂಕ್ಗಳು ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯನ್ನು (ಕೆಪಿ), ಅವುಗಳ ವರ್ಗೀಕರಣವನ್ನು ನಿರ್ಧರಿಸುವುದು, ವಿಮಾನ ಮತ್ತು ಪ್ರಾದೇಶಿಕ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ಸ್ವಾತಂತ್ರ್ಯದ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸುವುದು, ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳನ್ನು (ಪ್ರಾದೇಶಿಕ ಗುಂಪುಗಳಿಗೆ) ತೆಗೆದುಹಾಕುವುದು ಮತ್ತು ಅಸ್ಸೂರ್ ಪ್ರಕಾರ ರಚನೆಯನ್ನು "ತರ್ಕಬದ್ಧಗೊಳಿಸುವುದು" ಒಳಗೊಂಡಿರುತ್ತದೆ. ಅನಗತ್ಯ ಚಲನಶೀಲತೆಯೊಂದಿಗೆ ಸರ್ಕ್ಯೂಟ್ಗಳ ಸಂಭವನೀಯ ರೂಪಾಂತರಗಳ ಶಕ್ತಿಯ ವ್ಯಾಖ್ಯಾನದೊಂದಿಗೆ. ಕಾರ್ಯವಿಧಾನದ ರಚನೆಯನ್ನು ಕ್ರಿಯಾತ್ಮಕವಾಗಿ ಸಂಬಂಧಿಸಿದ ಅಂಶಗಳ ಸೆಟ್ (ಲಿಂಕ್ಗಳು, ಲಿಂಕ್ಗಳ ಗುಂಪುಗಳು ಅಥವಾ ಪ್ರಮಾಣಿತ ಕಾರ್ಯವಿಧಾನಗಳು) ಮತ್ತು ಅವುಗಳ ನಡುವಿನ ಸಂಬಂಧಗಳು (ಚಲಿಸುವ ಗೇರ್ಬಾಕ್ಸ್ಗಳು ಅಥವಾ ಸ್ಥಿರ ಕೀಲುಗಳು) ನಿರ್ಧರಿಸುತ್ತದೆ. ಲಿಂಕ್ಗಳು, ಗೇರ್ಬಾಕ್ಸ್ಗಳು ಮತ್ತು ರಚನಾತ್ಮಕ ಗುಂಪುಗಳ ಮಟ್ಟದಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ರಚನೆಯನ್ನು ಅದರ ರಚನಾತ್ಮಕ ರೇಖಾಚಿತ್ರದಲ್ಲಿ ಪ್ರದರ್ಶಿಸಲಾಗುತ್ತದೆ, ಇದು ಈ ಅಂಶಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಪ್ರಕಾರದ ಬಗ್ಗೆ ಹೆಚ್ಚುವರಿ ಮಾಹಿತಿಯೊಂದಿಗೆ ಚಲನಶಾಸ್ತ್ರದಿಂದ ಭಿನ್ನವಾಗಿದೆ.
1. ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯ ಮೂಲ ಪರಿಕಲ್ಪನೆಗಳು.
1.1. ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶೀಲತೆ (ಸ್ವಾತಂತ್ರ್ಯದ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆ). - ಯಾಂತ್ರಿಕತೆಯ ಎಲ್ಲಾ ಇತರ ಲಿಂಕ್ಗಳ ಸ್ಥಾನವನ್ನು (ವಿಮಾನದಲ್ಲಿ ಅಥವಾ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ) ಅನನ್ಯವಾಗಿ ನಿರ್ಧರಿಸುವ ಪ್ರಮುಖ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ (ಸ್ವತಂತ್ರ ಸಾಮಾನ್ಯೀಕೃತ ನಿರ್ದೇಶಾಂಕಗಳು). 1.2. ಸ್ಥಳೀಯ ಚಲನಶೀಲತೆ - ಯಾಂತ್ರಿಕತೆಯ ಪ್ರತ್ಯೇಕ ಲಿಂಕ್ಗಳ ಚಲನಶೀಲತೆ, ಇದು ಅಗತ್ಯವಿರುವ ಸಂಖ್ಯೆಯ ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್ಗಳ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವುದಿಲ್ಲ, ಆದರೆ ಇತರ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಲಿಂಕ್ಗಳ ಸಂಭವನೀಯ ಸ್ಥಳಾಂತರವನ್ನು ಅನುಮತಿಸುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಕ್ಯಾಮ್ ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ ಪಶರ್ಗೆ ಪ್ರಧಾನವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿರುವ ರೋಲರ್ ತಿರುಗುವಿಕೆಯು ಅನುಮತಿಸುತ್ತದೆ ಕ್ಯಾಮ್ನ ಮೇಲ್ಮೈಯಲ್ಲಿ ರೋಲಿಂಗ್ ಘರ್ಷಣೆಯ ಮೂಲಕ ಸ್ಲೈಡಿಂಗ್ ಘರ್ಷಣೆಯನ್ನು ಬದಲಾಯಿಸುವುದು.1.3. ಸಂಪರ್ಕ - ದೇಹದ ಚಲನೆಯ ಮೇಲೆ ನಿರ್ಬಂಧವನ್ನು ವಿಧಿಸಲಾಗಿದೆ (ಯಾಂತ್ರಿಕ ಲಿಂಕ್).
1.4 ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು. ಯಾವುದೇ ಕಾರ್ಯವಿಧಾನವನ್ನು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ಎರಡು-ಲಿಂಕ್ (ಪ್ರಾಥಮಿಕ) ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ಅಸೂರ್ ಗುಂಪುಗಳ ಸಂಯೋಜನೆಯಾಗಿ ಪ್ರತಿನಿಧಿಸಬಹುದು. ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು ಯಾಂತ್ರಿಕತೆಯ ಚಲಿಸಬಲ್ಲ ಲಿಂಕ್ಗಳಿಂದ ಮಾತ್ರ ರೂಪುಗೊಂಡ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳಾಗಿವೆ, ಅದರ ಚಲನಶೀಲತೆ (ಸಮತಲದಲ್ಲಿ) ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಅಸ್ಸೂರ್ ಗುಂಪಿನ ರಚನಾತ್ಮಕ ಸೂತ್ರಇಲ್ಲಿಂದ
![]() ,
,
ಎಲ್ಲಿ  ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ;
ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ;  - ರಚನಾತ್ಮಕ ಗುಂಪಿನಲ್ಲಿ ಕಡಿಮೆ ಸಿಪಿಗಳ ಸಂಖ್ಯೆ. ಎಲ್ಲಾ ಸಂಖ್ಯೆಗಳು ಪೂರ್ಣಾಂಕಗಳಾಗಿರಬೇಕು, ರಚನಾತ್ಮಕ ಗುಂಪಿನಲ್ಲಿರುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ ಯಾವಾಗಲೂ ಸಮವಾಗಿರಬೇಕು ಮತ್ತು ಕಡಿಮೆ CP ಗಳ ಸಂಖ್ಯೆಯು 3 ರ ಬಹುಸಂಖ್ಯೆಯಾಗಿರಬೇಕು. 1.4.1. ಅಸ್ಸೂರ್ ಗ್ರೂಪ್
- ಶೂನ್ಯ ಚಲನಶೀಲತೆಯೊಂದಿಗೆ ಫ್ಲಾಟ್ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳು. 1.4.2.
ವರ್ಗ
ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪು ರೂಪುಗೊಂಡ ಮುಚ್ಚಿದ ಲೂಪ್ನಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ ಆಂತರಿಕ
ಗುಂಪಿನ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳು. 1.4.3.
ಆದೇಶ
ಅಸ್ಸೂರ್ ಗುಂಪು ಸ್ಟ್ಯಾಂಡ್, ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ ಅಥವಾ ಇತರ ಗುಂಪುಗಳಿಗೆ ಜೋಡಿಸಲಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. 1.4.4.
ಬಾರುಗಳು
ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಈ ಗುಂಪನ್ನು ಜೋಡಿಸಲಾದ ಯಾಂತ್ರಿಕ ಅಂಶಗಳ ಸಾದೃಶ್ಯಗಳು ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಅವುಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಉಚಿತ CP ಗಳಿಂದ ವಿಸ್ತರಿಸುವ ಚುಕ್ಕೆಗಳ ಸಾಲುಗಳಾಗಿ ತೋರಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 1 ನೋಡಿ). ಈ ಪರಿಕಲ್ಪನೆಯನ್ನು ನೀಡಲಾಗಿದೆ ಆದೇಶಗುಂಪು ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಬಾರುಗಳು, ಅದರೊಂದಿಗೆ ಇದು ಸ್ಟ್ಯಾಂಡ್, ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ ಅಥವಾ ಇತರ ಅಸೂರ್ ಗುಂಪುಗಳಿಗೆ ಲಗತ್ತಿಸಲಾಗಿದೆ.
- ರಚನಾತ್ಮಕ ಗುಂಪಿನಲ್ಲಿ ಕಡಿಮೆ ಸಿಪಿಗಳ ಸಂಖ್ಯೆ. ಎಲ್ಲಾ ಸಂಖ್ಯೆಗಳು ಪೂರ್ಣಾಂಕಗಳಾಗಿರಬೇಕು, ರಚನಾತ್ಮಕ ಗುಂಪಿನಲ್ಲಿರುವ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ ಯಾವಾಗಲೂ ಸಮವಾಗಿರಬೇಕು ಮತ್ತು ಕಡಿಮೆ CP ಗಳ ಸಂಖ್ಯೆಯು 3 ರ ಬಹುಸಂಖ್ಯೆಯಾಗಿರಬೇಕು. 1.4.1. ಅಸ್ಸೂರ್ ಗ್ರೂಪ್
- ಶೂನ್ಯ ಚಲನಶೀಲತೆಯೊಂದಿಗೆ ಫ್ಲಾಟ್ ಚಲನಶಾಸ್ತ್ರದ ಸರಪಳಿಗಳು. 1.4.2.
ವರ್ಗ
ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪು ರೂಪುಗೊಂಡ ಮುಚ್ಚಿದ ಲೂಪ್ನಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ ಆಂತರಿಕ
ಗುಂಪಿನ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳು. 1.4.3.
ಆದೇಶ
ಅಸ್ಸೂರ್ ಗುಂಪು ಸ್ಟ್ಯಾಂಡ್, ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ ಅಥವಾ ಇತರ ಗುಂಪುಗಳಿಗೆ ಜೋಡಿಸಲಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. 1.4.4.
ಬಾರುಗಳು
ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಈ ಗುಂಪನ್ನು ಜೋಡಿಸಲಾದ ಯಾಂತ್ರಿಕ ಅಂಶಗಳ ಸಾದೃಶ್ಯಗಳು ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಅವುಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಉಚಿತ CP ಗಳಿಂದ ವಿಸ್ತರಿಸುವ ಚುಕ್ಕೆಗಳ ಸಾಲುಗಳಾಗಿ ತೋರಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 1 ನೋಡಿ). ಈ ಪರಿಕಲ್ಪನೆಯನ್ನು ನೀಡಲಾಗಿದೆ ಆದೇಶಗುಂಪು ಸಂಖ್ಯೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಬಾರುಗಳು, ಅದರೊಂದಿಗೆ ಇದು ಸ್ಟ್ಯಾಂಡ್, ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ ಅಥವಾ ಇತರ ಅಸೂರ್ ಗುಂಪುಗಳಿಗೆ ಲಗತ್ತಿಸಲಾಗಿದೆ. 
ಅಕ್ಕಿ. 1. ಅಸ್ಸೂರ್ ಡಬಲ್-ಲೀಡ್ ಗುಂಪುಗಳು.
ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು II-VI ತರಗತಿಗಳ ಉದಾಹರಣೆಗಳನ್ನು ಕೋಷ್ಟಕ 1 ತೋರಿಸುತ್ತದೆ. ಉಚಿತ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಹೊರಹೋಗುವ ಲೀಡ್ಗಳಿಂದ ಗುರುತಿಸಲಾಗಿದೆ - ಚುಕ್ಕೆಗಳ ರೇಖೆಗಳು, ಅಂಜೂರದಲ್ಲಿರುವಂತೆ. 1.
ಕೋಷ್ಟಕ 1.
| ಗುಂಪು | ಆದೇಶ |
|||
| IIವರ್ಗ | ||||
| IIIವರ್ಗ |
|
|||
| IVವರ್ಗ | ||||
| ವಿವರ್ಗ |
|
| ||
| VIವರ್ಗ |
|
| ||



2. ಆರು-ಲಿಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ರಚನಾತ್ಮಕ ವಿಶ್ಲೇಷಣೆಯನ್ನು ನಿರ್ವಹಿಸುವ ಉದಾಹರಣೆ, ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರವನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 2.
ಅಕ್ಕಿ. 2. ಯಾಂತ್ರಿಕತೆಯ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರ
2.1. ಸ್ಥಿರ ಲಿಂಕ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತಿದೆ- ರ್ಯಾಕ್ "0", ಅದರ ಮೇಲೆ ಎ ಮತ್ತು ಡಿ ಹಿಂಜ್ಗಳ ಸ್ಥಿರ ಅಕ್ಷಗಳು ಸ್ಥಿರವಾಗಿರುತ್ತವೆ, ಹಾಗೆಯೇ ಸ್ಲೈಡರ್ ಮಾರ್ಗದರ್ಶಿಗಳು. 2.2 ನಾವು ಸಂಖ್ಯೆ(ಅರೇಬಿಕ್ ಅಂಕಿಗಳು) ಮತ್ತು ಚಲಿಸುವ ಭಾಗಗಳನ್ನು ವರ್ಗೀಕರಿಸಿ.ನಂತರದ ಡೈನಾಮಿಕ್ ವಿಶ್ಲೇಷಣೆಯ ಅನುಕೂಲಕ್ಕಾಗಿ, ಶಕ್ತಿಯ ಮೂಲದಿಂದ (ಪ್ರಮುಖ ಲಿಂಕ್) ಅತ್ಯಂತ ದೂರದ ಗ್ರಾಹಕರಿಗೆ ಅನುಕ್ರಮವಾಗಿ ಲಿಂಕ್ಗಳನ್ನು ಸಂಖ್ಯೆ ಮಾಡಲು ಸಲಹೆ ನೀಡಲಾಗುತ್ತದೆ. ಪರಿಗಣನೆಯಲ್ಲಿರುವ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಐದು ಚಲಿಸುವ ಲಿಂಕ್ಗಳಿವೆ: ಲಿಂಕ್ 1 - ಕ್ರ್ಯಾಂಕ್, 360 0 ರ ಪೂರ್ಣ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ ತಿರುಗುವ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ; 2 ಮತ್ತು 4 - ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳು, ಚಲಿಸುವ ಅಕ್ಷಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ ಸಮತಲ-ಸಮಾನಾಂತರ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸಿ (ಎಂಸಿಎಸ್ನ ಸ್ಥಾನವು ಕಾಲಾನಂತರದಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ); ಲಿಂಕ್ 3 - ರಾಕರ್ ಆರ್ಮ್, ಸ್ಥಿರ ಅಕ್ಷ D ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಆಂದೋಲಕ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ; ಲಿಂಕ್ 5 - ಸ್ಲೈಡರ್, ಸ್ಥಿರ ಮಾರ್ಗದರ್ಶಿಗಳ ಉದ್ದಕ್ಕೂ ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. 2.3 ನಾವು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ವರ್ಗೀಕರಿಸುತ್ತೇವೆ(ಕೆಪಿ), ಇದು ಪಕ್ಕದ ಲಿಂಕ್ಗಳ ಸಾಪೇಕ್ಷ ಚಲನೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. ಕೆಲವು ಪಠ್ಯಪುಸ್ತಕಗಳಲ್ಲಿ, ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ರೋಮನ್ ಅಂಕಿಗಳೊಂದಿಗೆ ಎಣಿಸಲಾಗಿದೆ, ಉದಾಹರಣೆಗೆ, ಚಿತ್ರ 2, 3 ಮತ್ತು 5 ರಲ್ಲಿ I, II, III, IV, V, VI ಮತ್ತು VII. ಆದಾಗ್ಯೂ, ದೋಷಗಳ ಕಡಿಮೆ ಸಂಭವನೀಯತೆಯೊಂದಿಗೆ, ಇದು ಹೆಚ್ಚು ಅನುಕೂಲಕರವಾಗಿದೆ KP ಯ ವರ್ಗೀಕರಣವನ್ನು ಕೋಷ್ಟಕ 2 ರ ರೂಪದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಿ, ಇದರಲ್ಲಿ ರೋಮನ್ ಅಂಕಿಗಳ ಬದಲಿಗೆ ಸಂಖ್ಯೆಗಳು ದೊಡ್ಡ ಲ್ಯಾಟಿನ್ ಅಕ್ಷರಗಳನ್ನು ಸೂಚ್ಯಂಕಗಳೊಂದಿಗೆ ಬಳಸುತ್ತವೆ, ಅದು ಅನುಗುಣವಾದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳಿಂದ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಪಕ್ಕದ ಲಿಂಕ್ಗಳನ್ನು ಸೂಚಿಸುತ್ತದೆ.ಕೋಷ್ಟಕ 2.
| ಪಕ್ಕದ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ | ಡಿಜಿಟಲ್ ಕೆಪಿ ಕೋಡ್ | ನಿಯಂತ್ರಣ ಫಲಕದ ಪ್ರಕಾರ | ಅಂಜೂರದಲ್ಲಿ ಹುದ್ದೆ. 2, a, 2, b ಮತ್ತು ಪಠ್ಯದಲ್ಲಿ |
|
| 2&4 (ಅಥವಾ 3&4) | C 24 (ಅಥವಾ C 34) |
|||
ಎಲ್ಲಿ ಎನ್- ಚಲಿಸುವ ಭಾಗಗಳ ಸಂಖ್ಯೆ ( ಎನ್ = 5), ಪ 1
- ಒಂದೇ ಚಲನಶೀಲತೆಯೊಂದಿಗೆ ಕಡಿಮೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ ( ಪ 1
=7
) ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಹೆಚ್ಚಿನ (ವಿಮಾನದಲ್ಲಿ ಎರಡು ಚಲನಶೀಲತೆಯೊಂದಿಗೆ) ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳಿಲ್ಲ, ಪ 2
=0
. ಯಾಂತ್ರಿಕತೆಯ ಸ್ವಾತಂತ್ರ್ಯದ ಒಟ್ಟು ಸಂಖ್ಯೆಯು 1 ಆಗಿದೆ, ಅಂದರೆ, ಯಾಂತ್ರಿಕತೆಯ ಕಾರ್ಯಾಚರಣೆಗೆ, ಒಂದು ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್ ಸಾಕಾಗುತ್ತದೆ, ಇದನ್ನು ಎಬಿ ಕ್ರ್ಯಾಂಕ್ ಆಗಿ ಬಳಸಬಹುದು. 2.5 ನಾವು ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಗುರುತಿಸುತ್ತೇವೆ.ಅಸ್ಸೂರ್ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳನ್ನು ಗುರುತಿಸಲು (ಸ್ವಾತಂತ್ರ್ಯದ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆ W = 0), ನಾವು ಕಾರ್ಯವಿಧಾನವನ್ನು ಸರಳವಾದ ಮಾಡ್ಯೂಲ್ಗಳಾಗಿ ವಿಭಜಿಸುತ್ತೇವೆ, ಪ್ರಮುಖ ಲಿಂಕ್ನಿಂದ ದೂರದಿಂದ ಪ್ರಾರಂಭಿಸಿ. ಇದಕ್ಕೂ ಮೊದಲು, ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರಗಳಲ್ಲಿ (ಚಿತ್ರ 2 ನೋಡಿ) ಜೋಡಿಗಳನ್ನು ಒಂದು ಹಂತದಲ್ಲಿ, ನಿರ್ದಿಷ್ಟವಾಗಿ, 2, 3 ಮತ್ತು 4 ಲಿಂಕ್ಗಳ ನಡುವೆ ಪ್ರತ್ಯೇಕವಾಗಿ ಪ್ರದರ್ಶಿಸಲು ಸಲಹೆ ನೀಡಲಾಗುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ. 3, a ಅಥವಾ ಚಿತ್ರದಲ್ಲಿ. 3, ಬಿ. ಈ ಎರಡು ಯೋಜನೆಗಳು, ಸಾಮಾನ್ಯವಾಗಿ ಹೇಳುವುದಾದರೆ, ವಿಭಿನ್ನ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಅನುಗುಣವಾಗಿರುತ್ತವೆ, 4 ಮತ್ತು 5 ಲಿಂಕ್ಗಳ ಚಲನಶಾಸ್ತ್ರದಲ್ಲಿ ಭಿನ್ನವಾಗಿರುತ್ತವೆ (2, 3 ಮತ್ತು 4 ಲಿಂಕ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಕೀಲುಗಳ ಅಕ್ಷಗಳು ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಜೋಡಿಸದಿದ್ದರೆ), ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಮೂಲಕ ಹರಡುವ ಶಕ್ತಿಗಳಲ್ಲಿ ಲಿಂಕ್ಗಳು 2 ಮತ್ತು 3 ನಡುವಿನ ಜೋಡಿಗಳು. ಸೂಚಿಸಲಾದ ಲಿಂಕ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ತಿರುಗುವಿಕೆಯ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಅಕ್ಷಗಳನ್ನು ನಾವು ಸಂಯೋಜಿಸಿದರೆ, ನಂತರ ಚಲನಶಾಸ್ತ್ರದ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ನಿಸ್ಸಂದಿಗ್ಧವಾಗಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ಭಾಗವಹಿಸದ ನಿಷ್ಕ್ರಿಯ ಶಕ್ತಿಗಳ ಗೋಚರಿಸುವಿಕೆಯಿಂದಾಗಿ ಹರಡುವ ಶಕ್ತಿಗಳು ಬದಲಾಗಬಹುದು. ಈ ಅಕ್ಷಗಳ ಚಲನೆಯ ವೇಗಕ್ಕೆ ಪ್ರತಿ ಕ್ಷಣದಲ್ಲಿ ಅವುಗಳನ್ನು ಆರ್ಥೋಗೋನಲ್ ಆಗಿ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ ಎಂಬ ಅಂಶದಿಂದಾಗಿ ಸಂಪರ್ಕಿತ ಪಕ್ಕದ ಲಿಂಕ್ಗಳ ನಡುವೆ ಶಕ್ತಿಯ ವರ್ಗಾವಣೆ (ಆರ್ಥೋಗೋನಲ್ ವೆಕ್ಟರ್ಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನವು 0 ಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ!). 

ಅಕ್ಕಿ. 3. ಯಾಂತ್ರಿಕತೆಯ ಸಂಭವನೀಯ ಚಲನಶಾಸ್ತ್ರದ ಯೋಜನೆಗಳು.
ಅಂಜೂರದಲ್ಲಿ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರಗಳು. 3 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಅಥವಾ ರಾಕರ್ ಆರ್ಮ್ 3 ರ ಚಿತ್ರದೊಂದಿಗೆ ಕಟ್ಟುನಿಟ್ಟಾದ ತ್ರಿಕೋನಗಳ ರೂಪದಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯನ್ನು ವರ್ಗ 3 ಎಂದು ವರ್ಗೀಕರಿಸಿದರೆ (ಅತ್ಯಂತ ಸಂಕೀರ್ಣವಾದ ಮುಚ್ಚಿದ ಬಾಹ್ಯರೇಖೆಯ ಬದಿಗಳ ಸಂಖ್ಯೆಗೆ ಅನುಗುಣವಾಗಿ) ಮತ್ತು ಆದೇಶವನ್ನು ವರ್ಗೀಕರಿಸುವಲ್ಲಿ ದೋಷಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು 3 (ಮುಂಚೂಣಿಯಲ್ಲಿರುವ ಲಿಂಕ್ (ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ) ಮತ್ತು ಸ್ಟ್ಯಾಂಡ್ನೊಂದಿಗೆ ಗುಂಪನ್ನು ಸಂಪರ್ಕಿಸುವ ಲೀಡ್ಗಳ ಸಂಖ್ಯೆಗೆ ಅನುಗುಣವಾಗಿ. ತಪ್ಪುಗಳನ್ನು ತಪ್ಪಿಸಲು, ಯಾಂತ್ರಿಕತೆಯನ್ನು ವಿಭಜಿಸುವುದು ಅವಶ್ಯಕ ಪ್ರೊಟೊಜೋವಾಮಾಡ್ಯೂಲ್ಗಳು, ಅದರ ಸಂಪರ್ಕ ಕಡಿತವು ಯಾಂತ್ರಿಕತೆಯ ಉಳಿದ ಭಾಗದ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಅಡ್ಡಿಪಡಿಸುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ಆಯ್ಕೆಯು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ವರ್ಗ 1 ರ ಎರಡು-ಲೀಡ್ ಅಸೂರ್ ಗುಂಪುಗಳೊಂದಿಗೆ ಪ್ರಾರಂಭವಾಗಬೇಕು. 1. ಮೂರು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳೊಂದಿಗೆ ರಾಡ್ 4 ಮತ್ತು ಸ್ಲೈಡರ್ 5 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ಮೂಲಕ ಅತ್ಯಂತ ದೂರದ ಅಸ್ಸೂರ್ ಗುಂಪನ್ನು ರಚಿಸಲಾಗಿದೆ: ಚಿತ್ರದಲ್ಲಿ C 24, E 45, 5&0. ಚಿತ್ರದಲ್ಲಿ 3, a ಅಥವಾ C 34, E 45, 5&0. 3, b, ಇದರಲ್ಲಿ ಎರಡು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳು "1c" ಪ್ರಕಾರಕ್ಕೆ ಮತ್ತು ಒಂದು "1p" ಪ್ರಕಾರಕ್ಕೆ (5&0) ಸೇರಿದೆ. ಗೇರ್ ಬಾಕ್ಸ್ S 24 ಮತ್ತು 5&0 (Fig. 3, a) ಅಥವಾ S 34 ಮತ್ತು 5&0 (Fig. 3, b) ಮೇಲಿನ ಲೀಡ್ಗಳು ಈ Assur ಸ್ಟ್ರಕ್ಚರಲ್ ಗುಂಪನ್ನು (ಟೈಪ್ GDP) ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 (ರಾಕರ್ ಆರ್ಮ್ 3 ರಲ್ಲಿ ಚಿತ್ರ 3,) ನೊಂದಿಗೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ. b) ಮತ್ತು ಸ್ಟ್ರಟ್ 0. ಉಳಿದ ಭಾಗದ (ಲಿಂಕ್ಗಳು 1, 2 ಮತ್ತು 3) ಸ್ವಾತಂತ್ರ್ಯದ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆ (ಚಲನಶೀಲತೆಯ ಪದವಿ) ಸಮಾನವಾಗಿರುತ್ತದೆ ಡಬ್ಲ್ಯೂ= 1, ಮೂಲ ಕಾರ್ಯವಿಧಾನದಂತೆ. ಮೊದಲ ರಚನಾತ್ಮಕ ಗುಂಪನ್ನು ಸರಿಯಾಗಿ ಗುರುತಿಸಲಾಗಿದೆ ಎಂದು ಇದು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಮುಂದೆ, ನಾವು "1v" (B 12, C 23, D 03, ವಿಧದ VBB ನ Assur ರಚನಾತ್ಮಕ ಗುಂಪು) ಮೂರು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳೊಂದಿಗೆ ಎರಡನೇ ಗುಂಪನ್ನು (ಲಿಂಕ್ಗಳು 2 ಮತ್ತು 3) ಪ್ರತ್ಯೇಕಿಸುತ್ತೇವೆ. ಇದರ ನಂತರ ಉಳಿದ ಭಾಗದ ಚಲನಶೀಲತೆಯ ಮಟ್ಟ - ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿ A 01 ನೊಂದಿಗೆ ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ - W = 1 ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 4 ಅಸ್ಸೂರ್ ಗುಂಪುಗಳನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ತೋರಿಸುತ್ತದೆ. ಅಂಜೂರದಲ್ಲಿ ಪ್ರತಿ ಗುಂಪಿಗೆ ಚುಕ್ಕೆಗಳ ಬಾಣಗಳು. ಡ್ರೈವ್ ಲಿಂಕ್ 1 ("ಆರಂಭಿಕ ಯಾಂತ್ರಿಕತೆ") ಮತ್ತು ರ್ಯಾಕ್ 0 ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಯಾಂತ್ರಿಕತೆಯ ಉಳಿದ ಭಾಗಗಳಿಗೆ ಗುಂಪುಗಳನ್ನು ಜೋಡಿಸಲಾದ "ಲೀಡ್ಸ್" ಅನ್ನು ಚಿತ್ರ 4 ತೋರಿಸುತ್ತದೆ. ಇದಲ್ಲದೆ, ಅಂತಹ ಸಂಪರ್ಕವನ್ನು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಪರಿಚಯದ ಮೂಲಕ ಊಹಿಸಲಾಗಿದೆ. ರ್ಯಾಕ್ ಅಥವಾ ದಾನಿ ಕಾರ್ಯವಿಧಾನದ ದೇಹಕ್ಕೆ ಲಗತ್ತಿಸಲಾದ ಅಸ್ಸೂರ್ ಗುಂಪಿಗೆ ಸೇರಿದವರು, ಇದರಿಂದ ಅದು ಚಲಿಸಲು ಮತ್ತು ತಾಂತ್ರಿಕ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ನಿರ್ವಹಿಸಲು ಶಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತದೆ.
![]()
![]()
ಅಕ್ಕಿ. 4. ಅಸ್ಸೂರ್ನ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು. ಆರ್ಟೊಬೊಲೆವ್ಸ್ಕಿ I.I ರ ಪ್ರಕಾರ. ಗುಂಪಿನ ವರ್ಗವನ್ನು ಗುಂಪಿನ ಅತ್ಯಂತ ಸಂಕೀರ್ಣವಾದ ಮುಚ್ಚಿದ ಬಾಹ್ಯರೇಖೆಯನ್ನು ರೂಪಿಸುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಗುಂಪಿನ ಕ್ರಮವನ್ನು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಉಚಿತ ಅಂಶಗಳ ಸಂಖ್ಯೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಅದರೊಂದಿಗೆ ಗುಂಪನ್ನು ಆರಂಭಿಕ ಕಾರ್ಯವಿಧಾನ ಮತ್ತು ರಾಕ್ಗೆ ಜೋಡಿಸಬಹುದು. ಎರಡೂ ಬೇರ್ಪಡಿಸಬಹುದಾದ ರಚನಾತ್ಮಕ ಗುಂಪುಗಳು 2 ನೇ ಕ್ರಮಕ್ಕೆ ಸೇರಿವೆ ಮತ್ತು 1 ವರ್ಗ, ಇಡೀ ಕಾರ್ಯವಿಧಾನವು ಒಂದೇ ವರ್ಗಕ್ಕೆ ಸೇರಿದೆ. 2.6. ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ನಿವಾರಿಸಿ.ಲಿಂಕ್ಗಳ ಸಮತಲ-ಸಮಾನಾಂತರ ಚಲನೆಯ ಊಹೆಯು ಆದರ್ಶ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ಸಂಬಂಧಿಸಿದೆ ಮತ್ತು ವಾಸ್ತವದಲ್ಲಿ, ಅಂಶಗಳ ತಯಾರಿಕೆಯಲ್ಲಿನ ತಪ್ಪಾದ ಕಾರಣದಿಂದಾಗಿ, ಪ್ರಾಥಮಿಕವಾಗಿ ಲಿಂಕ್ಗಳ ಚಲನೆಯ ಸಮತಲದ ಅಕ್ಷಗಳ ಆರ್ಥೋಗೋನಾಲಿಟಿ ಮತ್ತು ಅಲ್ಲದ - ತಿರುಗುವ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ಅಕ್ಷಗಳ ಸಮಾನಾಂತರತೆ, ಯಾಂತ್ರಿಕತೆಯನ್ನು ಪ್ರಾದೇಶಿಕವಾಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ, ನಿಜವಾದ ಕಾರ್ಯವಿಧಾನಕ್ಕೆ ಸ್ವಾತಂತ್ರ್ಯದ ಡಿಗ್ರಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ಮಾಲಿಶೇವ್ ಸೂತ್ರದ ಪ್ರಕಾರ ಲೆಕ್ಕಹಾಕಬೇಕು. ಕೋಷ್ಟಕ 2 ರಿಂದ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು, ನಾವು ಪಡೆಯುತ್ತೇವೆ: ಯಾಂತ್ರಿಕತೆಯು 6 ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ಹೊಂದಿದೆ, ಕಡಿಮೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಹೆಚ್ಚಿನವುಗಳೊಂದಿಗೆ ಬದಲಿಸುವ ಮೂಲಕ ಅದನ್ನು ತೆಗೆದುಹಾಕಬಹುದು. ಶಕ್ತಿಯ ಹರಿವಿನ ದೃಷ್ಟಿಕೋನದಿಂದ ಚಿತ್ರ 1 ರಲ್ಲಿ ಹೆಚ್ಚು ಆದ್ಯತೆಯ ಯೋಜನೆಗಾಗಿ. 3, ಮತ್ತು ಅನಗತ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ತೆಗೆದುಹಾಕುವ ಆಯ್ಕೆಗಳಲ್ಲಿ ಒಂದನ್ನು ಟೇಬಲ್ 3 ಮತ್ತು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 5.
ಕೋಷ್ಟಕ 3.
| ಪಕ್ಕದ ಲಿಂಕ್ಗಳ ಸಂಖ್ಯೆ | PPD ಗಾಗಿ ಗೇರ್ಬಾಕ್ಸ್ನ ಪ್ರಕಾರ | ಪ್ರಾದೇಶಿಕ ನಿಯಂತ್ರಣ ಫಲಕದ ಪ್ರಕಾರ ಚಳುವಳಿ | ಅಂಜೂರದಲ್ಲಿ ಹುದ್ದೆ. 2a ಮತ್ತು 2b |
|
ಮಾನವ ಅಸ್ತಿತ್ವದ ಒಂದು ರೂಪವಾಗಿ ಸಂಸ್ಕೃತಿಯ ಮಹತ್ವವನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ ಮತ್ತು ಆಧುನಿಕ ಸಹಿಷ್ಣುತೆಯ ತತ್ವಗಳಿಂದ ಅವನ ಚಟುವಟಿಕೆಗಳಲ್ಲಿ ಮಾರ್ಗದರ್ಶನ ನೀಡಲಾಗುತ್ತದೆ,
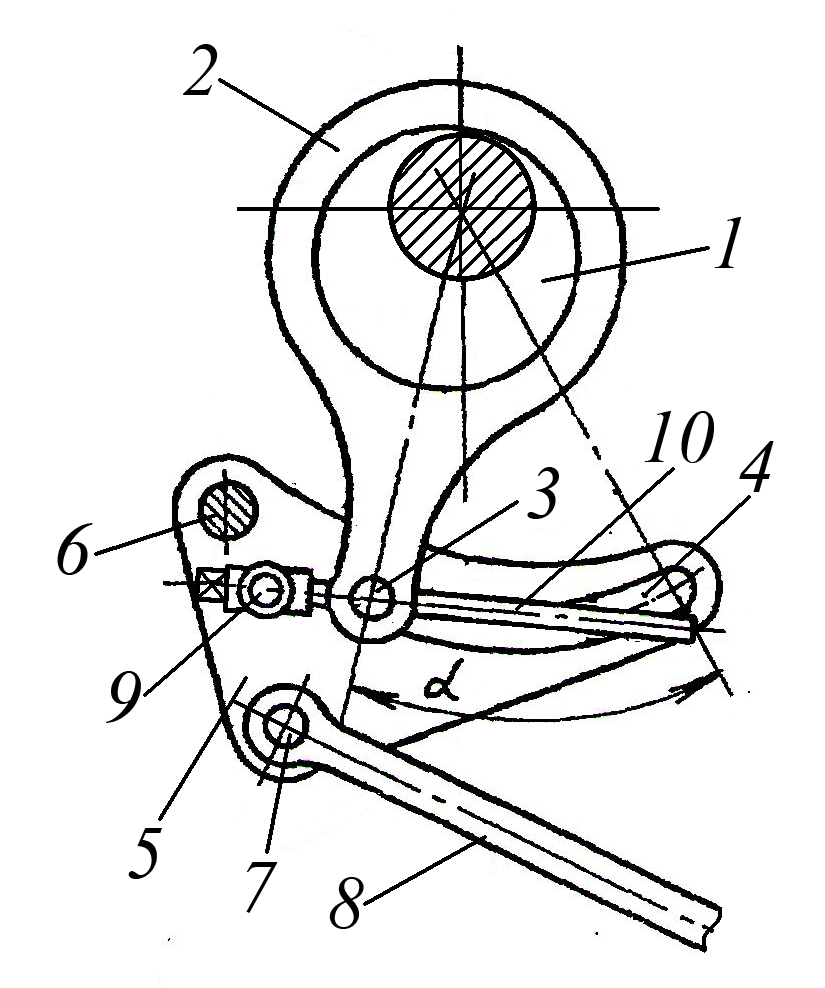
ಉತ್ಪನ್ನ ವಿವರಣೆ
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು. ಭಾಗ 1
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ತಿರುಗುವ, ಅನುವಾದ ಅಥವಾ ಸಮತಲ-ಸಮಾನಾಂತರ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುವ ಲಿಂಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಒಳಗೊಂಡಿವೆ. ಈ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಅವುಗಳ ಸರಳತೆ, ಹೆಚ್ಚಿನ ದಕ್ಷತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ಲೋಡ್ ಸಾಮರ್ಥ್ಯದಿಂದ ಪ್ರತ್ಯೇಕಿಸಲಾಗಿದೆ, ಆದಾಗ್ಯೂ, ಚಾಲಿತ ಲಿಂಕ್ನ ಯಾವುದೇ ಚಲನೆಯ ನಿಯಮವನ್ನು ಅವು ಒದಗಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ, ಇದು ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ ಅವುಗಳ ಬಳಕೆಯನ್ನು ಸ್ವಲ್ಪ ಮಟ್ಟಿಗೆ ಮಿತಿಗೊಳಿಸುತ್ತದೆ.
ಕೆಳಗಿನ ರೀತಿಯ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ತಾಂತ್ರಿಕ ಸಾಧನಗಳಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ: ನಾಲ್ಕು-ಬಾರ್ ಹಿಂಜ್ ಕಾರ್ಯವಿಧಾನಗಳು, ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನಗಳು, ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳು. ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಉದಾಹರಣೆಗಳು ಮತ್ತು ವಿನ್ಯಾಸದ ವೈಶಿಷ್ಟ್ಯಗಳನ್ನು ನೋಡೋಣ.
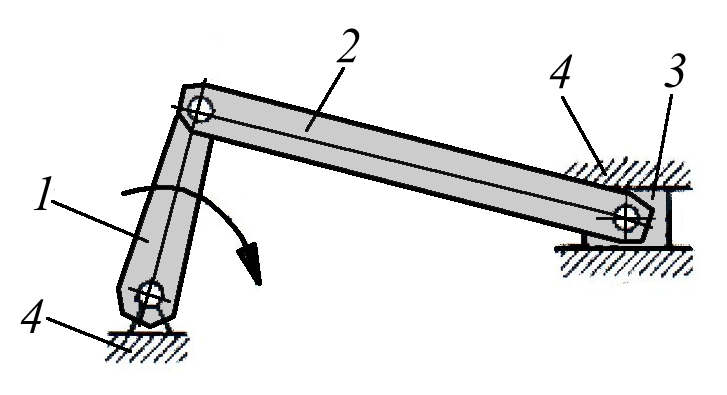
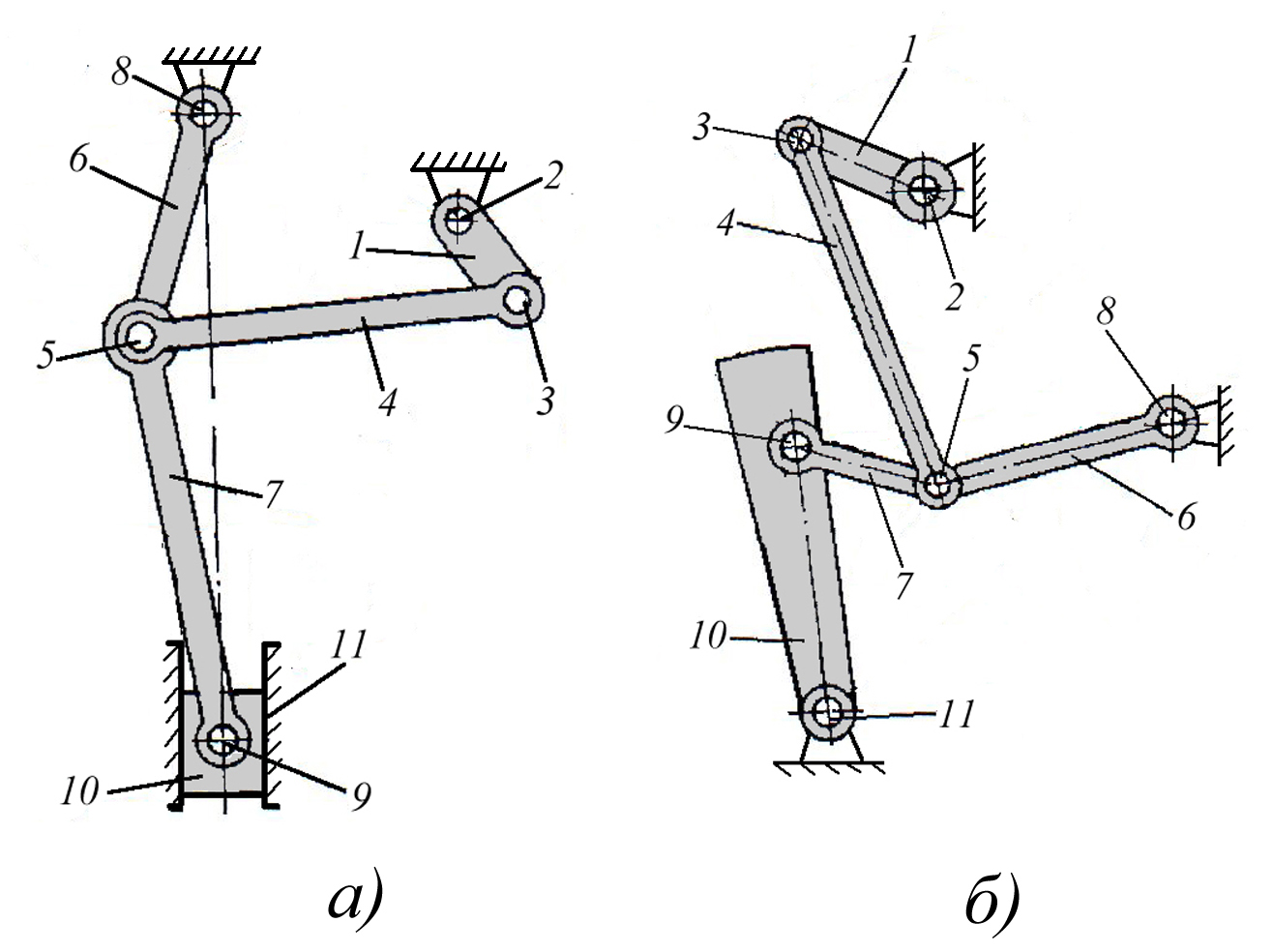
ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ಕಾರ್ಯವಿಧಾನಗಳು
ಹಿಂಗ್ಡ್ ನಾಲ್ಕು-ಬಾರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಮೂರು ವಿಧಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ: ಡಬಲ್-ಕ್ರ್ಯಾಂಕ್, ಇದರಲ್ಲಿ ಡ್ರೈವಿಂಗ್ ಮತ್ತು ಚಾಲಿತ ಲಿಂಕ್ ಪೂರ್ಣ ಕ್ರಾಂತಿಯನ್ನು ಮಾಡಬಹುದು (ಚಿತ್ರ 1a ನೋಡಿ), ಕ್ರ್ಯಾಂಕ್-ರಾಕರ್, ಇದರಲ್ಲಿ ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್, ಕ್ರ್ಯಾಂಕ್, ತಿರುಗುತ್ತದೆ, ಮತ್ತು ಚಾಲಿತ ರಾಕರ್ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ (ನೋಡಿ. ಚಿತ್ರ 1b) ಮತ್ತು ಎರಡು ರಾಕರ್ ತೋಳುಗಳು, ಇದರಲ್ಲಿ ಚಾಲನೆ ಮತ್ತು ಚಾಲಿತ ಲಿಂಕ್ಗಳು ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತವೆ (ಚಿತ್ರ 1c ನೋಡಿ).
ಎರಡು-ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನದ ಉದಾಹರಣೆಯೆಂದರೆ ಉದ್ದವಾದ ಕೋನೀಯ ಉಕ್ಕಿನ ಭಾಗವನ್ನು ರಾಕ್ನಿಂದ ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ರೋಲರ್ ಕನ್ವೇಯರ್ಗೆ ವರ್ಗಾಯಿಸುವ ಕಾರ್ಯವಿಧಾನವಾಗಿದೆ, ಅದರ ವಿನ್ಯಾಸ ರೇಖಾಚಿತ್ರವನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 2. ಇದು ಎರಡು ನಾಲ್ಕು-ರೇ ಸ್ಪ್ರಾಕೆಟ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ 1 ಮತ್ತು 2, ಶಾಫ್ಟ್ಗಳು 3 ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ನಾಲ್ಕು ತೊಟ್ಟಿಲು 4 ನೊಂದಿಗೆ ಅಕ್ಷಗಳು 5 ಮೂಲಕ ಪರಸ್ಪರ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಅದರೊಳಗೆ ವರ್ಕ್ಪೀಸ್ 6 ಅನ್ನು ವರ್ಗಾಯಿಸುವಾಗ ಇರಿಸಲಾಗುತ್ತದೆ, ಹೀಗೆ ನಾಲ್ಕು ಎರಡು-ಕ್ರ್ಯಾಂಕ್ ಅನ್ನು ರೂಪಿಸುತ್ತದೆ. ಕಾರ್ಯವಿಧಾನಗಳು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ಲೈಡಿಂಗ್ ಬೇರಿಂಗ್ಗಳ ಮೇಲಿನ ಶಾಫ್ಟ್ಗಳು 3 ವಸತಿ 7 ಮತ್ತು 8 ರಲ್ಲಿ ನೆಲೆಗೊಂಡಿವೆ, ಇವುಗಳನ್ನು ಬ್ರಾಕೆಟ್ಗಳು 9 ಮೂಲಕ ಸಾಮಾನ್ಯ ಫ್ರೇಮ್ 10 ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ.

ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ಕಾರ್ಯವಿಧಾನಗಳ ಮತ್ತೊಂದು ಪ್ರತಿನಿಧಿಯು ಡಬಲ್-ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳು (ಚಿತ್ರ 3 ನೋಡಿ), ಇದನ್ನು ನಿಯಮದಂತೆ, ಚಾಲಿತ ರಾಕರ್ ತೋಳಿನ ಸ್ವಿಂಗ್ ಕೋನವನ್ನು ಬದಲಾಯಿಸಲು (ಹೆಚ್ಚಳ, ಕಡಿಮೆ) ಅಥವಾ ಅದರ ಮೇಲೆ ರಚಿಸಲಾದ ಬಲವನ್ನು ಬದಲಾಯಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ. .
ಅಂಜೂರದಲ್ಲಿ. 3 ಎಡಬಲ್-ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದರ ವಿನ್ಯಾಸ (ಉದ್ದ ಅನುಪಾತ ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ಸ್ 1 ಮತ್ತು 3 ರ ಸಾಪೇಕ್ಷ ಸ್ಥಾನ) ಸ್ವಿಂಗ್ ಕೋನವನ್ನು ಹೆಚ್ಚಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ β α ಪ್ರಮುಖ ರಾಕರ್ ತೋಳು 1. ಚಿತ್ರದಲ್ಲಿ. 3 ಬಿಡಬಲ್-ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ತೋರಿಸಲಾಗಿದೆ, ಅದರ ವಿನ್ಯಾಸ (ಉದ್ದ ಅನುಪಾತ ಮತ್ತು ರಾಕರ್ ತೋಳುಗಳ ಸಾಪೇಕ್ಷ ಸ್ಥಾನ 1 ಮತ್ತು 3) ಸ್ವಿಂಗ್ ಕೋನವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ β ಸ್ವಿಂಗ್ ಕೋನಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಚಾಲಿತ ರಾಕರ್ ಆರ್ಮ್ 3 α ಪ್ರಮುಖ ರಾಕರ್ ತೋಳು 1. ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ಕಾರ್ಯವಿಧಾನದಲ್ಲಿದ್ದರೆ. 3 ಎ, ಪ್ರಮುಖ ಲಿಂಕ್ ಪೂರ್ಣ ಕ್ರಾಂತಿಯೊಂದಿಗೆ ತಿರುಗುವ ಲಿಂಕ್ 3 ಆಗಿರುತ್ತದೆ ಮತ್ತು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ. 3 ಬಿ, ಅದರ ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್ 1 ಪೂರ್ಣ ಕ್ರಾಂತಿಯನ್ನು ಮಾಡುತ್ತದೆ, ನಂತರ ಈ ಡಬಲ್-ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಕ್ರ್ಯಾಂಕ್-ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿ ಬದಲಾಗುತ್ತವೆ. ಈ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಯಂತ್ರಗಳು ಮತ್ತು ಸಲಕರಣೆಗಳ ಪವರ್ ಆಕ್ಯೂವೇಟರ್ಗಳಾಗಿ ವಿರಳವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಏಕೆಂದರೆ ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್ನಿಂದ ಚಾಲಿತ ಲಿಂಕ್ಗೆ ಪಡೆಗಳ ಪ್ರಸರಣದ ಸಮಯದಲ್ಲಿ ಹೆಚ್ಚುತ್ತಿರುವ ನಷ್ಟದಿಂದಾಗಿ ಅವು ಸೀಮಿತ ಸ್ವಿಂಗ್ ಕೋನದಲ್ಲಿ (60 - 90 ಡಿಗ್ರಿ) ಮಾತ್ರ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ, ಕ್ರ್ಯಾಂಕ್ಗಳ ಸ್ವಿಂಗ್ ಕೋನಗಳನ್ನು ಹೆಚ್ಚಿಸುವುದರೊಂದಿಗೆ. ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಸಹಾಯಕ ಪದಗಳಿಗಿಂತ ಬಳಸಲಾಗುತ್ತದೆ, ಕಡಿಮೆ ವೇಗ ಮತ್ತು ಲೋಡ್ಗಳಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಈ ರೀತಿಯ ಕಾರ್ಯವಿಧಾನವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ವಿವಿಧ ರೀತಿಯ ಟಿಲ್ಟರ್ಗಳಲ್ಲಿ ಪ್ರಚೋದಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
 ಅಕ್ಕಿ. 4. ಮೋಲ್ಡಿಂಗ್ ಯಂತ್ರದ ಟೇಬಲ್ ಅನ್ನು ಓರೆಯಾಗಿಸಲು ಒಂದು ಟಿಲ್ಟರ್.
ಅಕ್ಕಿ. 4. ಮೋಲ್ಡಿಂಗ್ ಯಂತ್ರದ ಟೇಬಲ್ ಅನ್ನು ಓರೆಯಾಗಿಸಲು ಒಂದು ಟಿಲ್ಟರ್.
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 4 ಟಿಲ್ಟರ್ನ ಆಕ್ಟಿವೇಟರ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ತೋರಿಸುತ್ತದೆ, ನಾಲ್ಕು-ಬಾರ್ ವಿನ್ಯಾಸದ ಪ್ರಕಾರ ಮಾಡಲ್ಪಟ್ಟಿದೆ, ಡ್ರೈವಿಂಗ್ ರಾಕರ್ ಆರ್ಮ್ 6 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಡ್ರೈವ್ ಶಾಫ್ಟ್ 3 ನಲ್ಲಿ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಇದನ್ನು ಫ್ರೇಮ್ 1 ಮತ್ತು ಚಾಲಿತ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ಸ್ಲೈಡಿಂಗ್ 2 ಮೇಲೆ ಜೋಡಿಸಲಾಗಿದೆ. ರಾಕರ್ ಆರ್ಮ್ 7 ಅನ್ನು ಅಕ್ಷ 5 ಮತ್ತು ಸ್ಲೈಡಿಂಗ್ ಬೇರಿಂಗ್ 4 ಮೂಲಕ ಫ್ರೇಮ್ 1 ನಲ್ಲಿ ಪ್ರಮುಖವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಈ ಸಂದರ್ಭದಲ್ಲಿ, ರಾಡ್ 6 ಮತ್ತು 7 ರ ವಿರುದ್ಧ ತುದಿಗಳನ್ನು ಅಕ್ಷಗಳು 8 ಮತ್ತು 9 ರ ಮೂಲಕ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 10 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಅದರ ಮೇಲೆ ಎರಡು ಚರಣಿಗೆಗಳು 8 ಒಂದು ಅಡ್ಡ ಅಡ್ಡಬೀಮ್ 11 ಅನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿವಾರಿಸಲಾಗಿದೆ. ಡ್ರೈವ್ ಶಾಫ್ಟ್ 3 ಅನ್ನು ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗಿಸಿದಾಗ (ಟಿಲ್ಟರ್ ಆಕ್ಯೂವೇಟರ್ನ ಡ್ರೈವ್ ಅನ್ನು ತೋರಿಸಲಾಗಿಲ್ಲ), ಪ್ರಮುಖ ರಾಕರ್ ಆರ್ಮ್ 6 ಸಹ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಅದರೊಂದಿಗೆ ಸಂಪೂರ್ಣ ನಾಲ್ಕು-ಬಾರ್ ಹಿಂಜ್ನ ಕಾರ್ಯವಿಧಾನ. ಸ್ವಿಂಗ್ ಅಕ್ಷಗಳ ಆಯ್ಕೆ ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ಸ್ 6 ಮತ್ತು 7 ರ ಉದ್ದವನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 4, ತಿರುಗಿಸಿದಾಗ, ಪ್ಲಾಟ್ಫಾರ್ಮ್ 11 ಅನ್ನು ಕೋನದಲ್ಲಿ ತಿರುಗಿಸಲು ಅನುಮತಿಸುತ್ತದೆ, ಇದನ್ನು ನಿರ್ದಿಷ್ಟವಾಗಿ ಮೋಲ್ಡಿಂಗ್ ಯಂತ್ರದ ಟೇಬಲ್ ಅನ್ನು ಓರೆಯಾಗಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ. 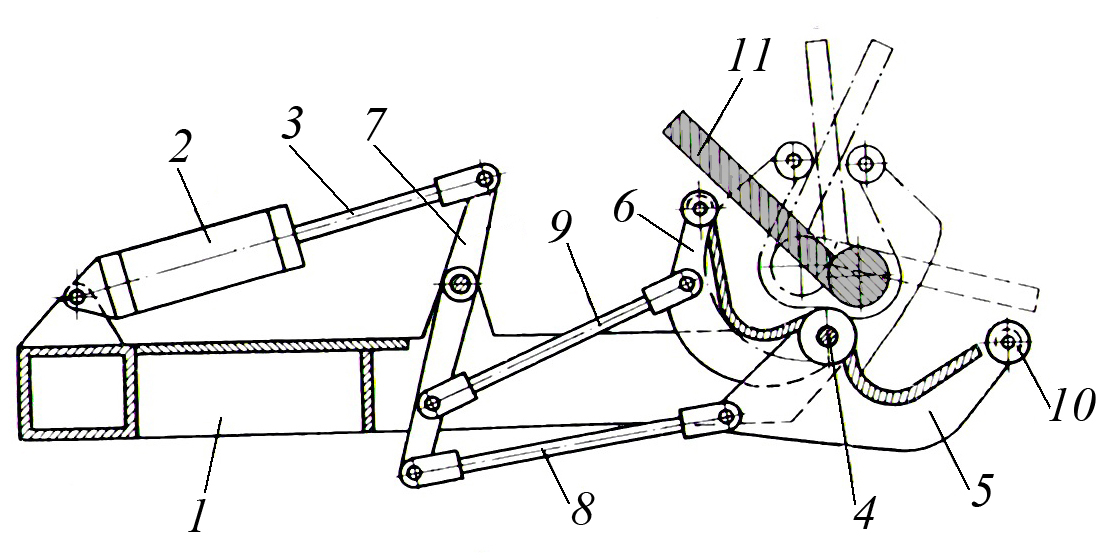
ಅಕ್ಕಿ. 5 ವೆಲ್ಡಿಂಗ್ ಪೊಸಿಷನರ್ನ ವಿನ್ಯಾಸ, ಅದರ ರೋಟರಿ ದವಡೆಗಳು ಸ್ಪಷ್ಟವಾದ ನಾಲ್ಕು-ಬಾರ್ಗಳ ರಾಕರ್ ತೋಳುಗಳಿಂದ ಚಾಲಿತವಾಗಿವೆ
ಚಿತ್ರ 5 ವೆಲ್ಡಿಂಗ್ ಸ್ಥಾನಿಕ, ತಿರುಗುವ ದವಡೆಗಳ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ
ಸಾಮಾನ್ಯ ಚಾಲಿತ ರಾಕರ್ ತೋಳನ್ನು ಹೊಂದಿರುವ ಉಚ್ಚಾರಣೆ ನಾಲ್ಕು-ಲಿಂಕ್ಗಳ ಚಾಲಿತ ರಾಕರ್ ತೋಳುಗಳಾಗಿವೆ. ಇದು ಫ್ರೇಮ್ 1 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಡ್ರೈವ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 2 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದರಲ್ಲಿ ರಾಡ್ 3 ಡಬಲ್-ಆರ್ಮ್ಡ್ ಲಿವರ್ 7 ರ ಮೂಲಕ ಇದೆ, ಇದರ ಚಾಲಿತ ತೋಳು ರಾಡ್ 8 ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಎರಡು ಸ್ಪಷ್ಟವಾದ ನಾಲ್ಕು-ಲಿಂಕ್ಗಳ ಪ್ರಮುಖ ರಾಕರ್ ಆರ್ಮ್ ಆಗಿದೆ. ಮತ್ತು 9, ಈ ನಾಲ್ಕು-ಲಿಂಕ್ಗಳ ರಾಕರ್ ಆರ್ಮ್ಗಳಿಂದ ಚಾಲಿತವಾಗಿರುವ ಸಾಮಾನ್ಯ ಅಕ್ಷ 4 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ರೋಟರಿ ದವಡೆಗಳು 5 ಮತ್ತು 6 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿವೆ.
ಟಿಲ್ಟರ್ ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಉತ್ಪನ್ನ 11 ರ ಮೊದಲ ಸೀಮ್ನ ವೆಲ್ಡಿಂಗ್ ಅನ್ನು ಪೂರ್ಣಗೊಳಿಸಿದ ನಂತರ, ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 2 ಅನ್ನು ಆನ್ ಮಾಡಲು ಆಜ್ಞೆಯನ್ನು ನೀಡಲಾಗುತ್ತದೆ, ಅದರಲ್ಲಿ ರಾಡ್ 3 ಅನ್ನು ಹಿಂತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ ಮತ್ತು ತಿರುಗುವ ದವಡೆಗಳು 5 ಮತ್ತು 6 ಅನ್ನು ಒಟ್ಟಿಗೆ ತರುತ್ತದೆ, ವೆಲ್ಡ್ ಉತ್ಪನ್ನ 11 ಅನ್ನು ಇನ್ಸ್ಟಾಲ್ ಮಾಡುವಾಗ ಲಂಬ ಸ್ಥಾನ (ಈ ಸಮಯದಲ್ಲಿ, ಬೆಂಬಲ ರೋಲರುಗಳು 10 ಉತ್ಪನ್ನದ ಶೆಲ್ಫ್ ಉದ್ದಕ್ಕೂ ಸುತ್ತಿಕೊಳ್ಳುತ್ತವೆ). ಇದರ ಪರಿಣಾಮವಾಗಿ, ಬೆಸುಗೆ ಹಾಕಿದ ಉತ್ಪನ್ನದ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೇಂದ್ರವು 11 ಬೆಂಬಲ ಪ್ರಿಸ್ಮ್ನ ಎದುರು ಭಾಗಕ್ಕೆ ಚಲಿಸುತ್ತದೆ (ಅಂಜೂರ 5 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ) ಮತ್ತು ರಾಡ್ 3 ಆಗಿರುವಾಗ ಸಂಭವಿಸುವ ಸನ್ನೆಕೋಲಿನ 5 ಮತ್ತು 6 ರ ನಂತರದ ತೆರೆಯುವಿಕೆಯೊಂದಿಗೆ. ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 2 ಅನ್ನು ವಿಸ್ತರಿಸಲಾಗಿದೆ, ಉತ್ಪನ್ನವನ್ನು ಎರಡನೇ ಸೀಮ್ ಅನ್ನು ಬೆಸುಗೆ ಹಾಕಲು ಅನುಕೂಲಕರವಾದ ಸ್ಥಾನದಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ.
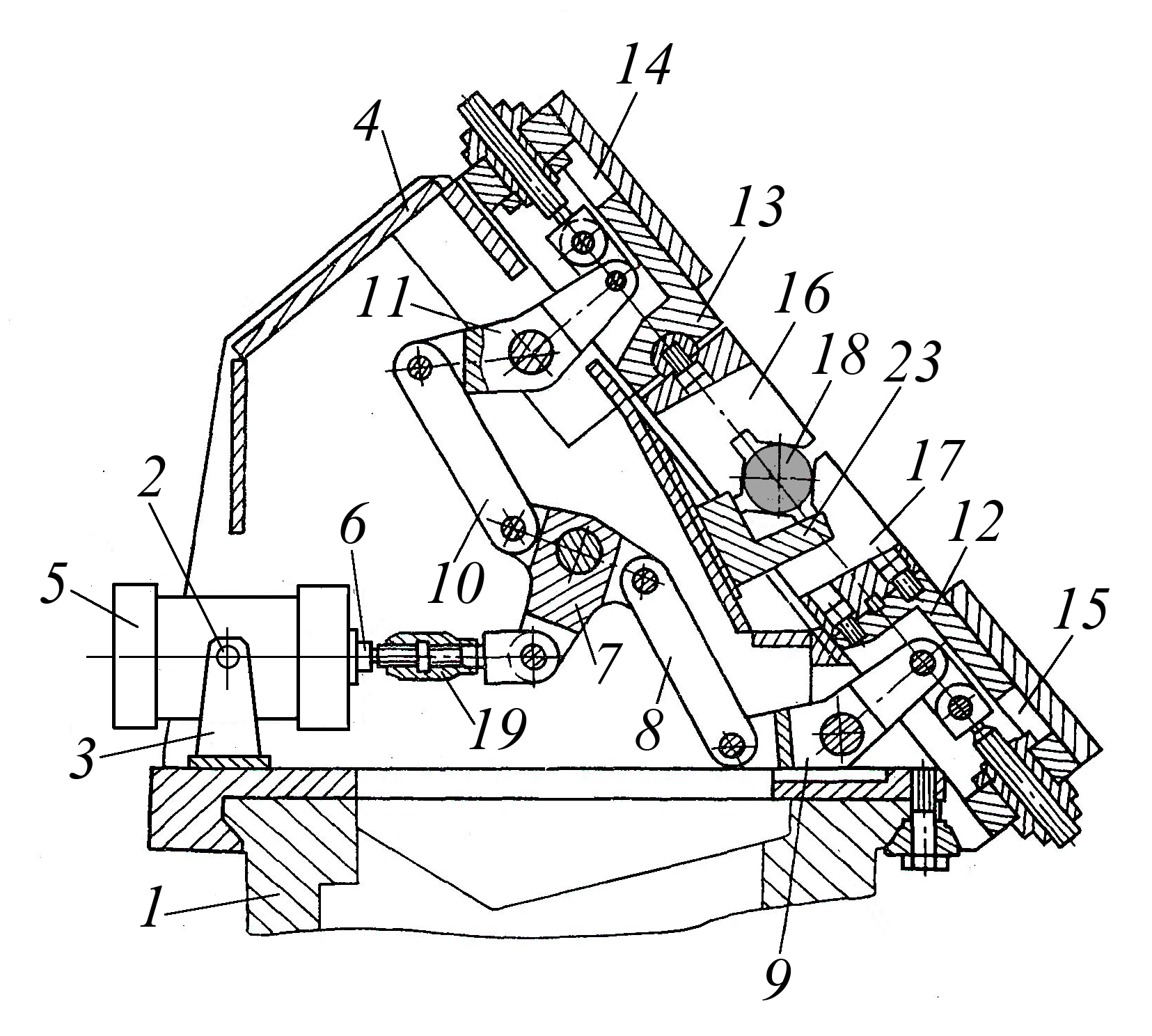
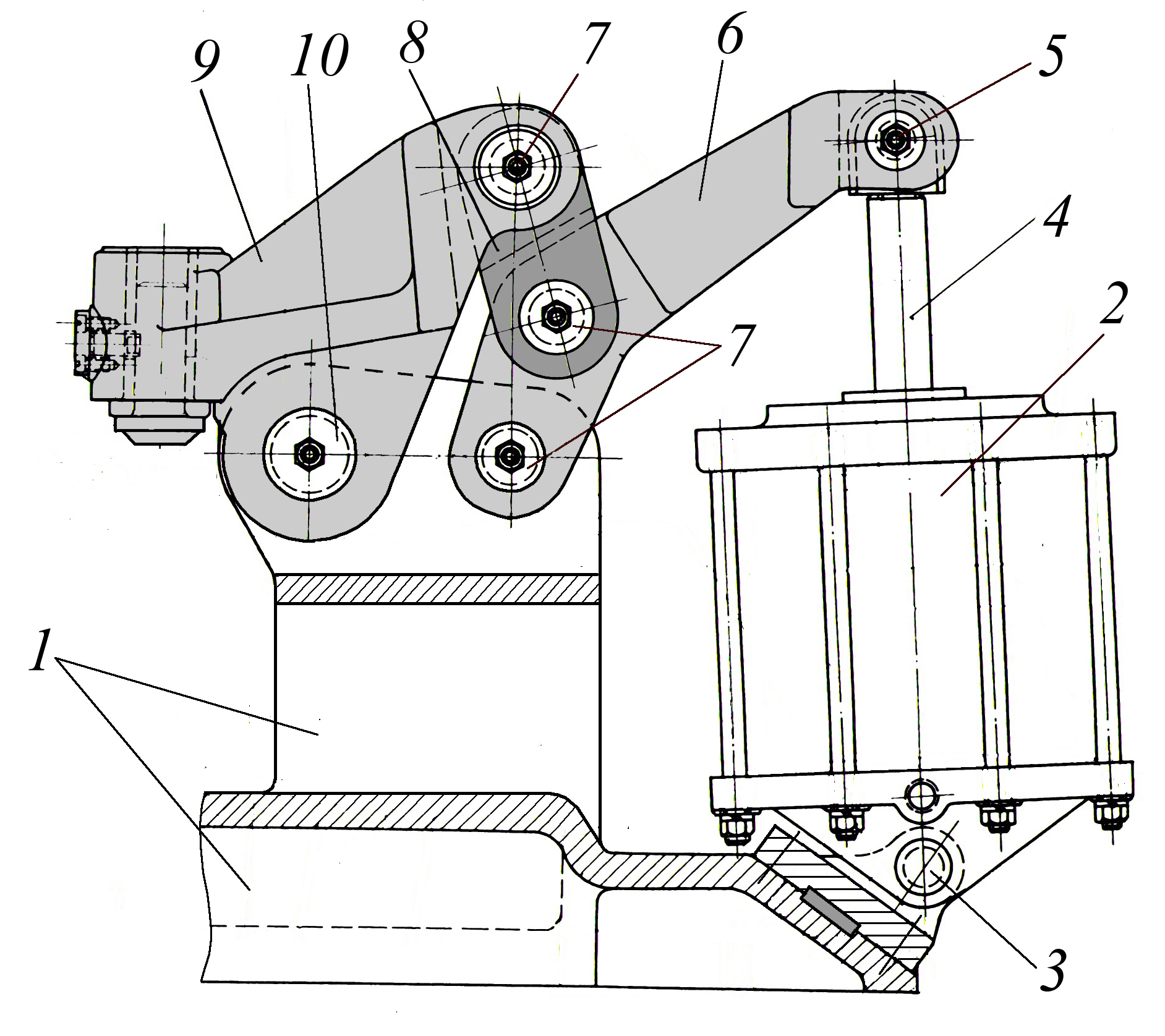
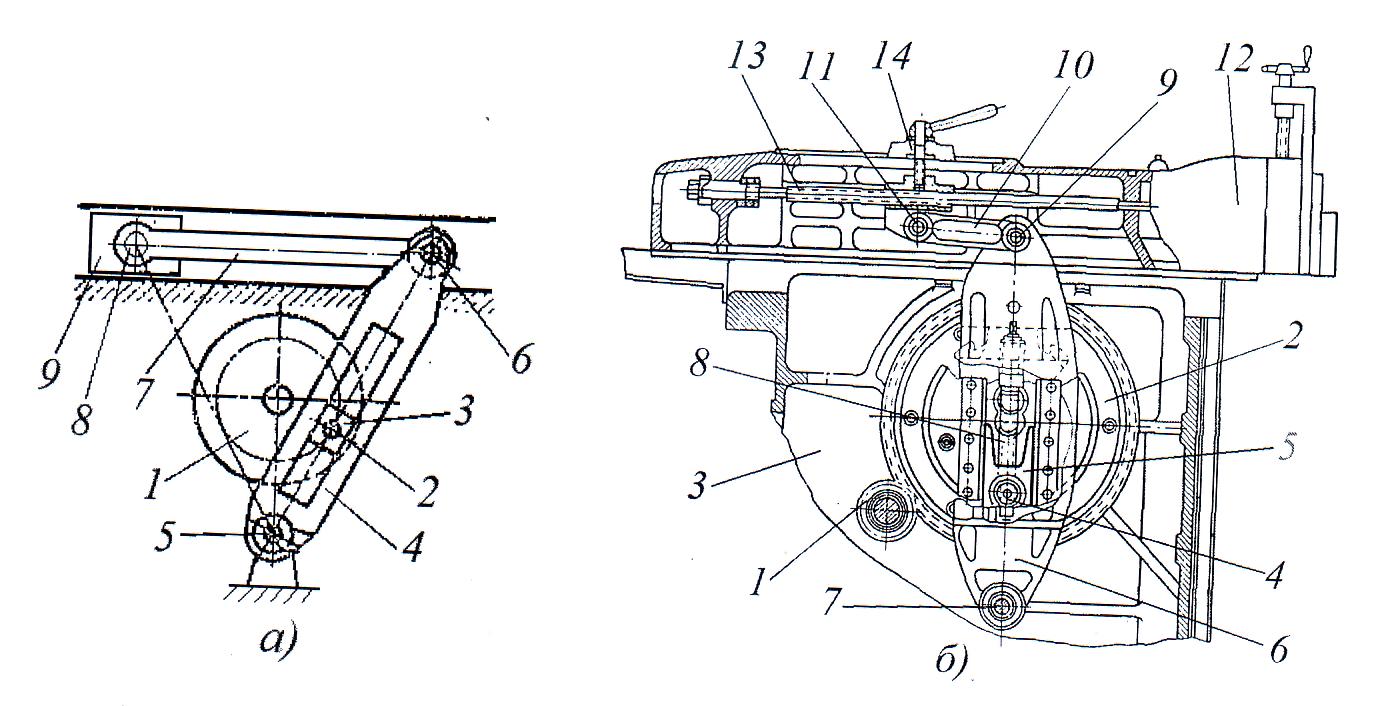
ಚಿತ್ರ 6 ಎರಡು ಸ್ಪಷ್ಟವಾದ ನಾಲ್ಕು-ಬಾರ್ಗಳನ್ನು ಹೊಂದಿರುವ ಮಿಲ್ಲಿಂಗ್-ಸೆಂಟ್ರಲ್ ಯಂತ್ರದ ಕ್ಲ್ಯಾಂಪಿಂಗ್ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸ.
ಚಿತ್ರ 6 ಮಿಲ್ಲಿಂಗ್-ಸೆಂಟ್ರಲ್ ಯಂತ್ರದ ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುವ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದರಲ್ಲಿ ಎರಡು ಸ್ಪಷ್ಟವಾದ ನಾಲ್ಕು-ಬಾರ್ಗಳಿವೆ, ಅದರ ಪ್ರಮುಖ ಲಿಂಕ್ ಮೂರು-ಕೈ ಲಿವರ್ ಆಗಿದೆ, ಆದರೆ ನಂತರದ ಪ್ರಮುಖ ತೋಳು ಡ್ರೈವ್ನ ರಾಡ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್, ಮತ್ತು ನಾಲ್ಕು-ಬಾರ್ಗಳ ಚಾಲಿತ ರಾಕರ್ ತೋಳುಗಳು ಹಂತಹಂತವಾಗಿ ಚಲಿಸುವ ಕ್ಲ್ಯಾಂಪಿಂಗ್ ಪ್ರಿಸ್ಮ್ಗಳಿಗೆ ಸಂಪರ್ಕ ಹೊಂದಿವೆ. ಇದು ಯಂತ್ರದ ಫ್ರೇಮ್ 1 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ವಸತಿ 4 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದರಲ್ಲಿ ರಾಡ್ 6 ನೊಂದಿಗೆ ಡ್ರೈವ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 5 ಅನ್ನು ಅಕ್ಷ 2 ಮತ್ತು ಬ್ರಾಕೆಟ್ 3 ಮೂಲಕ ಹಿಂಜ್ ಆಗಿ ಜೋಡಿಸಲಾಗುತ್ತದೆ, ಎರಡನೆಯದು ರಾಡ್ 19 ಮತ್ತು ಮೂರು-ತೋಳುಗಳನ್ನು ಬಳಸಿ ಲಿವರ್ 7, ಮಧ್ಯಂತರ ರಾಡ್ಗಳು 8 ಮತ್ತು 10 ಮತ್ತು ಎರಡು-ತೋಳಿನ ಸನ್ನೆಕೋಲಿನ 9 ಮತ್ತು 11, ಸ್ಲೈಡರ್ಗಳು 12 ಮತ್ತು 13 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಇವುಗಳನ್ನು ವಸತಿ 14 ಮತ್ತು 15 ರ ಮಾರ್ಗದರ್ಶಿಗಳಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ 4. ಸ್ಲೈಡರ್ಗಳಲ್ಲಿ 12 ಮತ್ತು 13, ಪ್ರಿಸ್ಮ್ಗಳು 16 ಮತ್ತು 17 ಅನ್ನು ನಿವಾರಿಸಲಾಗಿದೆ, ಅದರ ನಡುವೆ ಬೇಸ್ ತೊಟ್ಟಿಲು 23 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ.
ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುವ ಕಾರ್ಯವಿಧಾನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಕ್ಲ್ಯಾಂಪ್ ಮಾಡಲು (ಶಾಫ್ಟ್ ಅನ್ನು ಟ್ರಿಮ್ ಮಾಡಲು ಮತ್ತು ಕೇಂದ್ರೀಕರಿಸಲು), ಬೇಸ್ ತೊಟ್ಟಿಲು 23 ನಲ್ಲಿ ಮೊದಲೇ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಸಂಕುಚಿತ ಗಾಳಿಯನ್ನು ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 5 ರ ರಾಡ್ ಕುಹರಕ್ಕೆ ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ, ಆದರೆ ಅದರ ರಾಡ್ 6 ಹಿಂತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ಮೂರು ತೋಳಿನ ಲಿವರ್ 7 ಅನ್ನು ತಿರುಗಿಸುತ್ತದೆ. , ಇದು ಮಧ್ಯಂತರ ರಾಡ್ 8 ಮತ್ತು 10 ರ ಮೂಲಕ, ಡಬಲ್-ಆರ್ಮ್ಡ್ ಲಿವರ್ಸ್ 9 ಮತ್ತು 11 ಸ್ಲೈಡರ್ಗಳು 12 ಮತ್ತು 13 ಅನ್ನು ಅವುಗಳಿಗೆ ಜೋಡಿಸಲಾದ ಪ್ರಿಸ್ಮ್ಗಳು 16 ಮತ್ತು 17 ನೊಂದಿಗೆ ತರುತ್ತವೆ, ಇದು ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುತ್ತದೆ 18. ಸಂಸ್ಕರಿಸಿದ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಬಿಡುಗಡೆ ಮಾಡಲು, ಸಂಕುಚಿತ ಗಾಳಿಯನ್ನು ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ. ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 5 ರ ಪಿಸ್ಟನ್ ಕುಹರಕ್ಕೆ, ಅದರ ರಾಡ್ 6 ರಾಡ್ 19 ರ ಮೂಲಕ ವಿಸ್ತರಿಸುತ್ತದೆ ಮತ್ತು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನವು 12 ಮತ್ತು 13 ಸ್ಲೈಡರ್ಗಳನ್ನು ಪ್ರಿಸ್ಮ್ 16 ಮತ್ತು 17 ನೊಂದಿಗೆ ಅವುಗಳ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಹಿಂದಿರುಗಿಸುತ್ತದೆ, ಆದರೆ ಸಂಸ್ಕರಿಸಿದ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಬಿಡುಗಡೆ ಮಾಡುತ್ತದೆ.
ಚಿತ್ರ 7 ಟೇಬಲ್ಟಾಪ್ ಪ್ರೆಸ್ನ ಪ್ರಚೋದಕ ವಿನ್ಯಾಸ.
ನ್ಯೂಮೋಮೆಕಾನಿಕಲ್ ಡ್ರೈವಿನೊಂದಿಗೆ ಟೇಬಲ್ಟಾಪ್ ಪ್ರೆಸ್ನ ವಿನ್ಯಾಸವನ್ನು ಚಿತ್ರ 7 ತೋರಿಸುತ್ತದೆ, ಅದರ ಪ್ರಚೋದಕವು ಡಬಲ್-ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವಾಗಿದೆ. ಇದು ಪವರ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 2 ಅನ್ನು ಫ್ರೇಮ್ 1 ನಲ್ಲಿ ಅಕ್ಷ 3 ಮೂಲಕ ಜೋಡಿಸಲಾಗಿದೆ, ಅದರ ರಾಡ್ 4 ಅನ್ನು ಅಕ್ಷ 5 ರ ಮೂಲಕ ರಾಕರ್ ಆರ್ಮ್ 6 ಗೆ ಪ್ರಧಾನವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಮತ್ತು ಎರಡನೆಯದು ಆಕ್ಸಲ್ 7 ಅನ್ನು ಬಳಸಿಕೊಂಡು ರಾಡ್ 8 ಗೆ ಪಿವೋಟ್ ಆಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. , ಇದು ಪ್ರತಿಯಾಗಿ ಅಕ್ಷ 7 ರ ಮೂಲಕ ಡಬಲ್-ಆರ್ಮ್ಡ್ ಲಿವರ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಗಮನಾರ್ಹ ಶಕ್ತಿಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವ ಸಾಮರ್ಥ್ಯ.
ಅಕ್ಕಿ. 8. ಆಧಾರದ ಮೇಲೆ ಮಾಡಿದ ಕನ್ವೇಯರ್ ಕಾರ್ಗೋ ಅಮಾನತು ವಿನ್ಯಾಸ
ವ್ಯಕ್ತಪಡಿಸಿದ ನಾಲ್ಕು ಬಾರ್
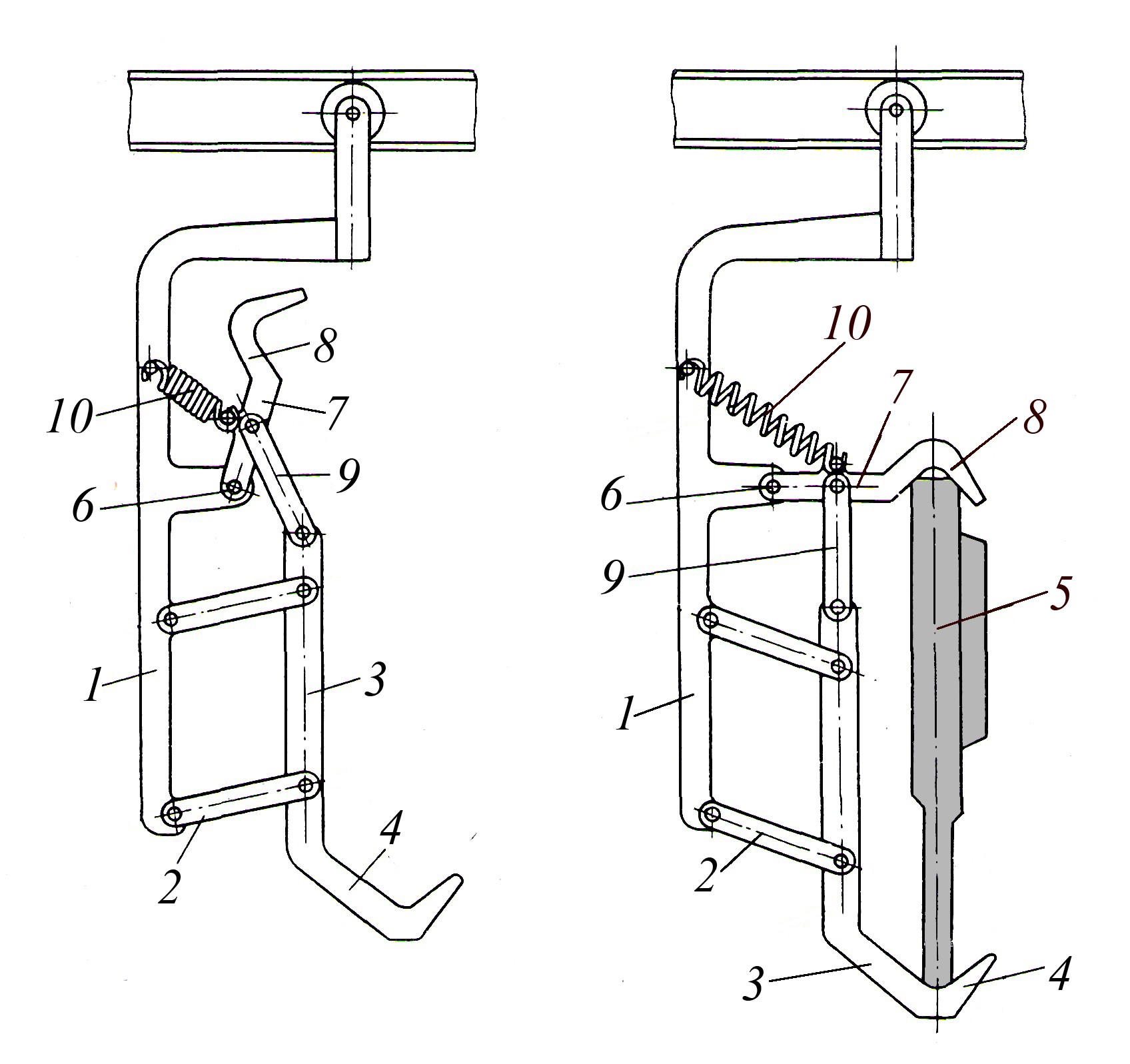
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 8 ಕನ್ವೇಯರ್ ಕಾರ್ಗೋ ಅಮಾನತು ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದರ ಪ್ರಚೋದಕವು ನಾಲ್ಕು-ಬಾರ್ ಹಿಂಜ್ ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಈ ವಿನ್ಯಾಸವು ಸಾಗಿಸಿದ ಭಾಗದ ಸರಳ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹ ಸ್ಥಿರೀಕರಣ ಮತ್ತು ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುವಿಕೆಯನ್ನು ಖಾತ್ರಿಗೊಳಿಸುತ್ತದೆ, ಜೊತೆಗೆ ಅದರ ಸ್ಥಾಪನೆ ಮತ್ತು ಇಳಿಸುವಿಕೆಯನ್ನು ಖಾತ್ರಿಗೊಳಿಸುತ್ತದೆ. ಇದು ಸ್ಥಿರ ಸ್ಟ್ಯಾಂಡ್ 1 ಅನ್ನು ಕನ್ವೇಯರ್ ಕ್ಯಾರೇಜ್ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಎರಡು ಸಮಾನ-ಉದ್ದದ ರಾಕರ್ ಆರ್ಮ್ಸ್ 2, ರಾಡ್ 3 ಅನ್ನು ಲೋಡ್-ಒಯ್ಯುವ ಶೆಲ್ಫ್ 4 ಅನ್ನು ಬಳಸಿ, ಸಾಗಿಸಿದ ಭಾಗ 5 ಅನ್ನು ಸ್ಥಾಪಿಸಲು ಮತ್ತು ಲಿವರ್ 7 ಅನ್ನು ಹೊಂದಿದೆ. ಒತ್ತಡದ ಶೆಲ್ಫ್ 8, ಸ್ಥಿರವಾದ ಸ್ಟ್ಯಾಂಡ್ 1 ಗೆ ಅಕ್ಷ 6 ರ ಮೂಲಕ ಮತ್ತು ರಾಡ್ 9 ರ ಮೂಲಕ ಪಿವೋಟಲಿಯಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ರಾಡ್ 3 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ಥಿರ ಪೋಸ್ಟ್ ನಡುವೆ ವಿಸ್ತರಣೆ ವಸಂತ 10 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ 1 ಮತ್ತು ಲಿವರ್ 7.
ಅಮಾನತು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿ, ಲೋಡ್-ಸಾಗಿಸುವ ಶೆಲ್ಫ್ 4 ರೊಂದಿಗಿನ ರಾಡ್ 3 ಮತ್ತು ಒತ್ತಡದ ಶೆಲ್ಫ್ 8 ರೊಂದಿಗಿನ ಲಿವರ್ 7 ಮೇಲಿನ ಸ್ಥಾನದಲ್ಲಿದೆ ಮತ್ತು ಅಮಾನತುಗೊಳಿಸುವಿಕೆಯ ಮೇಲೆ ಭಾಗ 5 ರ ಅನುಸ್ಥಾಪನೆಗೆ ಮಧ್ಯಪ್ರವೇಶಿಸಬೇಡಿ. ಈ ಸ್ಥಾನದಲ್ಲಿ, ಭಾಗ 5 ಅನ್ನು ಲೋಡ್-ಒಯ್ಯುವ ಶೆಲ್ಫ್ 4 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಆದರೆ ಅದರ ತೂಕದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಲಿವರ್ 7, ರಾಡ್ 9 ಮತ್ತು ರಾಡ್ 3, ಸ್ಪ್ರಿಂಗ್ 10 ರ ಬಲವನ್ನು ಮೀರಿಸುತ್ತದೆ, ಕೆಳಕ್ಕೆ ಇಳಿಸಲಾಗುತ್ತದೆ. ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುವ ಶೆಲ್ಫ್ 8 ರಾಕರ್ ಆರ್ಮ್ಸ್ 2 ನೊಂದಿಗೆ ರಾಡ್ 3 ರ ಸಂಪರ್ಕದ ಬಿಂದುಕ್ಕಿಂತ ದೊಡ್ಡ ತ್ರಿಜ್ಯದ ಉದ್ದಕ್ಕೂ ತಿರುಗುವುದರಿಂದ, ಅದೇ ಸಮಯದಲ್ಲಿ ಅದು ಲೋಡ್-ಒಯ್ಯುವ ಫೋರ್ಕ್ 4 ಗಿಂತ ಹೆಚ್ಚಿನ ದೂರವನ್ನು ಚಲಿಸುತ್ತದೆ, ಆದ್ದರಿಂದ ಭಾಗ 5 ಅನ್ನು ಒತ್ತಲಾಗುತ್ತದೆ ಲೋಡ್-ಸಾಗಿಸುವ ಶೆಲ್ಫ್ಗೆ ಕ್ಲ್ಯಾಂಪ್ ಮಾಡುವ ಶೆಲ್ಫ್ 8 ರಿಂದ 4. ಇಳಿಸುವಿಕೆಗಾಗಿ ಅದರ ಭಾಗಗಳನ್ನು ಲೋಡ್-ಒಯ್ಯುವ ಶೆಲ್ಫ್ 4 ಮತ್ತು ಒತ್ತಡದ ಶೆಲ್ಫ್ 8 ರ ಸ್ಟ್ರೋಕ್ ಪ್ರಮಾಣದಿಂದ ಮೇಲಕ್ಕೆತ್ತಲಾಗುತ್ತದೆ ಮತ್ತು ಸ್ಪ್ರಿಂಗ್ 10 ರಿಟರ್ನ್ನ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ಲಿವರ್ 7 ಜೊತೆಗೆ ಮೇಲಿನ ಆರಂಭಿಕ ಸ್ಥಾನಕ್ಕೆ, ಹೀಗೆ ಭಾಗವನ್ನು ಬಿಡುಗಡೆ ಮಾಡುತ್ತದೆ.
ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನಗಳು
ಎಲ್ಲಾ ರೀತಿಯ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ, ಚಲನಶಾಸ್ತ್ರದ ಸರಳತೆಯಿಂದಾಗಿ ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನಗಳು ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿ ಹರಡಿವೆ, ಇದು ತಿರುಗುವ ಚಲನೆಯನ್ನು ಅನುವಾದ ಚಲನೆಯಾಗಿ ಪರಿವರ್ತಿಸಲು ತುಲನಾತ್ಮಕವಾಗಿ ಸುಲಭಗೊಳಿಸುತ್ತದೆ, ಇದು ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ಆಕ್ಟಿವೇಟರ್ಗಳಲ್ಲಿ ಅವುಗಳ ಬಳಕೆಯನ್ನು ಅನುಮತಿಸುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಯಾಂತ್ರಿಕ ಪ್ರೆಸ್ಗಳಲ್ಲಿ , ಮತ್ತು ಪರಿಭ್ರಮಣ ಚಲನೆಗೆ ಭಾಷಾಂತರ ಚಲನೆ, ಇದು ಅವುಗಳನ್ನು ಆಂತರಿಕ ದಹನಕಾರಿ ಎಂಜಿನ್ನ ಪ್ರಚೋದಕವಾಗಿ ಬಳಸಲು ಅನುಮತಿಸುತ್ತದೆ. ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನವು ಚೌಕಟ್ಟಿನಲ್ಲಿ ತಿರುಗುವ ಸಾಧ್ಯತೆಯೊಂದಿಗೆ ಸ್ಥಾಪಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ (ಕ್ರ್ಯಾಂಕ್ ಅಥವಾ ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್), ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಅದರೊಂದಿಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಇದು ಸ್ಲೈಡರ್ 3 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಇದು ಕ್ರ್ಯಾಂಕ್ 1 ತಿರುಗಿದಾಗ, ಫ್ರೇಮ್ 4 ರ ಮಾರ್ಗದರ್ಶಿಗಳಲ್ಲಿ ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ (ಚಿತ್ರ 9 ನೋಡಿ).
ಅಕ್ಕಿ. 9. ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆ.
ಅಂಜೂರದಲ್ಲಿ. ನಾಲ್ಕು-ಸಿಲಿಂಡರ್ ಆಂತರಿಕ ದಹನಕಾರಿ ಎಂಜಿನ್ನ ಕ್ರ್ಯಾಂಕ್-ರಾಡ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ಚಿತ್ರ 10 ತೋರಿಸುತ್ತದೆ, ಇದು ನಾಲ್ಕು-ವಿಲಕ್ಷಣ ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 1 ಮತ್ತು ನಾಲ್ಕು ಪಿಸ್ಟನ್ ಗುಂಪುಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ (ಚಿತ್ರ 10 ಸಾಂಪ್ರದಾಯಿಕವಾಗಿ ಒಂದು ಪಿಸ್ಟನ್ ಗುಂಪನ್ನು ತೋರಿಸುತ್ತದೆ), ಪ್ರತಿಯೊಂದೂ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಮತ್ತು a ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಪಿಸ್ಟನ್ 3, ಇದು ಅನುಗುಣವಾದ ಸಿಲಿಂಡರ್ನ ಲೈನರ್ನಲ್ಲಿ ಮಿಶ್ರಣವಾಗಿದೆ.
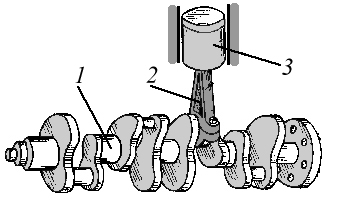
ಅಕ್ಕಿ. 10. ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆ
ಆಂತರಿಕ ದಹನಕಾರಿ ಎಂಜಿನ್.
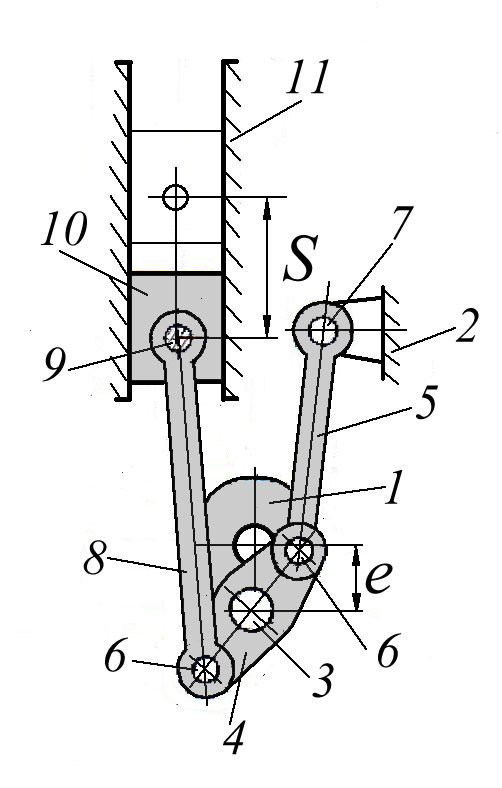
ಹಲವಾರು ಯಂತ್ರಗಳು ಮತ್ತು ಸಲಕರಣೆಗಳ ವಿನ್ಯಾಸವು ದೊಡ್ಡ ಸ್ಲೈಡರ್ ಸ್ಟ್ರೋಕ್ ಮತ್ತು ಸ್ಟ್ರೋಕ್ನ ಕೊನೆಯಲ್ಲಿ ದೊಡ್ಡ ಬಲವನ್ನು ರಚಿಸುವ ಅಗತ್ಯವಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೊಣಕಾಲು-ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಕ್ರ್ಯಾಂಕ್ ಮತ್ತು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಗುಂಪನ್ನು ಸಹ ಒಳಗೊಂಡಿರುತ್ತದೆ (ಚಿತ್ರ 11 ನೋಡಿ). ಅಂತಹ ಕಾರ್ಯವಿಧಾನವು ಡ್ರೈವ್ ಶಾಫ್ಟ್ 2 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಫ್ರೇಮ್ನ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಡ್ರೈವ್ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 4, ರಾಕರ್ ಆರ್ಮ್ 6, ಚಾಲಿತ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 7 ಮತ್ತು ಫ್ರೇಮ್ 11 ರ ಮಾರ್ಗದರ್ಶಿಗಳಲ್ಲಿ ಚಲಿಸುವ ಸ್ಲೈಡರ್ 10. , ರಾಕರ್ ಆರ್ಮ್ 6 ಅನ್ನು ಅಕ್ಷ 8 ರ ಮೂಲಕ ಫ್ರೇಮ್ಗೆ ಪ್ರಧಾನವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಮತ್ತು ಚಾಲಿತ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 7 ಅನ್ನು ಅಕ್ಷ 9 ಮೂಲಕ ಸ್ಲೈಡರ್ 10 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ (ಚಿತ್ರ 11a ನೋಡಿ). ಅಂತಹ ಯಾಂತ್ರಿಕತೆಯ ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಕ್ರಮೇಣ ಚಲಿಸುವ ಸ್ಲೈಡರ್ ಆಗಿರಬಾರದು, ಆದರೆ ಸ್ವಿಂಗಿಂಗ್ ಲಿಂಕ್ 10, ಅಕ್ಷ 9 ರ ಮೂಲಕ ಚಾಲಿತ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 7 ಗೆ ಮತ್ತು ಅಕ್ಷ 11 ರ ಮೂಲಕ ಫ್ರೇಮ್ಗೆ (Fig. 11b ನೋಡಿ).
ಅಕ್ಕಿ. 11. ದೊಡ್ಡ ಸ್ಲೈಡರ್ ಸ್ಟ್ರೋಕ್ ಮತ್ತು ಸ್ಟ್ರೋಕ್ನ ಕೊನೆಯಲ್ಲಿ ಸ್ಲೈಡರ್ನಲ್ಲಿ ಬಲದೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆಯನ್ನು ಕ್ರ್ಯಾಂಕ್ ಮಾಡಿ.
ರಾಕರ್ ಆರ್ಮ್ಸ್, ಲಿವರ್ಗಳು ಮತ್ತು ರಾಡ್ಗಳ ವ್ಯವಸ್ಥೆಯೊಂದಿಗೆ, ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನವು ವಿಭಿನ್ನ ಸ್ಟ್ರೋಕ್ ಗಾತ್ರಗಳು, ವೇಗಗಳು ಮತ್ತು ಅದರ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ಪಡೆಯಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ - ಸ್ಲೈಡರ್, ಇದು ಹಲವಾರು ಯಂತ್ರಗಳ ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ಹೆಚ್ಚಾಗಿ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ ಮತ್ತು ಉಪಕರಣ.
ಅಕ್ಕಿ. 12. ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ನ ವಿಕೇಂದ್ರೀಯತೆಗೆ ಹೋಲಿಸಿದರೆ ಸ್ಲೈಡ್ನ ಎರಡು ಬಾರಿ ಸ್ಟ್ರೋಕ್ನೊಂದಿಗೆ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ.
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 12 ಸ್ಲೈಡರ್ನ ಡಬಲ್ ಸ್ಟ್ರೋಕ್ನೊಂದಿಗೆ ಕ್ರ್ಯಾಂಕ್-ರಾಡ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ ಎಸ್ ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ ವಿಕೇಂದ್ರೀಯತೆಯ ಮೌಲ್ಯಕ್ಕೆ ಹೋಲಿಸಿದರೆ ಇ . ಇದು ಹೌಸಿಂಗ್ 2 ರಲ್ಲಿ ಬೇರಿಂಗ್ಗಳ ಮೇಲೆ ಜೋಡಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಕ್ರ್ಯಾಂಕ್ ನೆಕ್ 3 ನಲ್ಲಿ ರಾಕರ್ ಆರ್ಮ್ 4 ಅನ್ನು ಆಕ್ಸಲ್ 6 ಮೂಲಕ ಜೋಡಿಸಲಾಗಿದೆ 5 ರಾಡ್ 5 ಅನ್ನು ಅಕ್ಷ 7 ನಲ್ಲಿ ಹೌಸಿಂಗ್ 2 ನಲ್ಲಿ ಪ್ರಮುಖವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಇದೆ. 8 ಪ್ರಮುಖವಾಗಿ ಅಕ್ಷ 9 ಮೂಲಕ ಸ್ಲೈಡರ್ 10 ಗೈಡ್ಗಳಲ್ಲಿ ಚಲಿಸುವ ಮೂಲಕ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ 11. ರಾಕರ್ ಆರ್ಮ್ 4 ರ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸದಲ್ಲಿ ಉಪಸ್ಥಿತಿಯು ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ರ ಕ್ರ್ಯಾಂಕ್ ಕುತ್ತಿಗೆಯ ಮೇಲೆ ಹಿಂಜ್ ಆಗಿ ಜೋಡಿಸಲ್ಪಟ್ಟಿದೆ, ರಾಡ್ 5 ಮತ್ತು ಸಂಪರ್ಕಿಸುವ ಸಂಪರ್ಕ ರಾಡ್ 8, ಸ್ಲೈಡರ್ 10 ಗೆ ಅದರ ಫಾರ್ವರ್ಡ್ ಮತ್ತು ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ ಹೆಚ್ಚಿದ ಚಲನೆಯನ್ನು ನೀಡುತ್ತದೆ.
![]()
ಅಕ್ಕಿ. 13. ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವು ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಬದಲಾಯಿಸದೆಯೇ ಸ್ಲೈಡರ್ನ ಸ್ಟ್ರೋಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ದ್ವಿಗುಣಗೊಳಿಸಲು ಅನುಮತಿಸುತ್ತದೆ.
ಅಂಜೂರದಲ್ಲಿ. 13 ರಾಕರ್ ಕಾರ್ಯವಿಧಾನದೊಂದಿಗೆ ಸಂಯೋಜಿಸಲ್ಪಟ್ಟ ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದು ಡ್ರೈವ್ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ನ ತಿರುಗುವಿಕೆಯ ಕೋನೀಯ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸದೆ ಸ್ಲೈಡರ್ನ ಸ್ಟ್ರೋಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ದ್ವಿಗುಣಗೊಳಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಇದು ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಫ್ರೇಮ್ನಲ್ಲಿ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಡ್ರೈವ್ನಿಂದ ತಿರುಗುವಿಕೆಯನ್ನು ಸ್ವೀಕರಿಸುತ್ತದೆ (ಡ್ರೈವ್ ಅನ್ನು ಚಿತ್ರ 13 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ), ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2, ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 3, ಇದನ್ನು ಫ್ರೇಮ್ನಲ್ಲಿ ಪ್ರಧಾನವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ. ಒಂದು ಅಕ್ಷದ 4 ಮತ್ತು, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 5 ರ ಮೂಲಕ, ಸ್ಲೈಡರ್ 6 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಹಾಸಿಗೆ ಮಾರ್ಗದರ್ಶಿಗಳು 7 ರಲ್ಲಿ ಚಲಿಸುತ್ತದೆ.
ಕಾರ್ಯವಿಧಾನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು 180 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ತಿರುಗಿಸಿದಾಗ, ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 3 ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಎ
, ಸ್ಲೈಡರ್ 6 ಒಂದು ಡಬಲ್ ಸ್ಟ್ರೋಕ್ ಮಾಡುತ್ತದೆ, ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಮತ್ತೊಂದು 180 ಡಿಗ್ರಿಗಳಷ್ಟು ತಿರುಗಿಸುವುದರೊಂದಿಗೆ, ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 3 ಮತ್ತೆ ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಎ
, ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಹಿಂತಿರುಗಿ, ಮತ್ತು ಸ್ಲೈಡರ್ 6, ಅದೇ ಸಮಯದಲ್ಲಿ, ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ನ ಒಂದು ಕ್ರಾಂತಿಯಲ್ಲಿ ಎರಡನೇ ಡಬಲ್ ಸ್ಟ್ರೋಕ್ ಮಾಡುತ್ತದೆ.
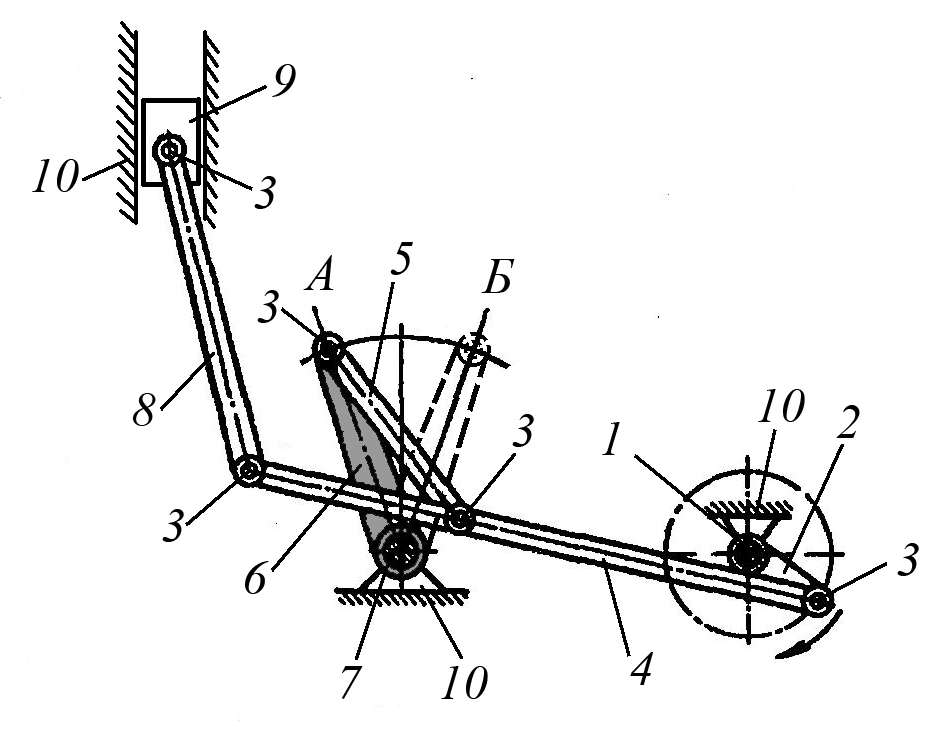
ಅಕ್ಕಿ. 14. ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವು ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯನ್ನು ರಿವರ್ಸ್ ಮಾಡಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ.
ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ, ರಿವರ್ಸಿಬಲ್ ಅಲ್ಲದ ಡ್ರೈವ್ನ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯನ್ನು ರಿವರ್ಸ್ ಮಾಡುವುದು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ; ಇದಕ್ಕಾಗಿ, ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ ಹೆಚ್ಚುವರಿ ಲಿಂಕ್ಗಳನ್ನು ಅದರಲ್ಲಿ ನಿರ್ಮಿಸಬಹುದು. 14. ಈ ಕ್ರ್ಯಾಂಕ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯು ಡ್ರೈವಿಂಗ್ ಶಾಫ್ಟ್ 1 ರ ಮೇಲೆ ಜೋಡಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ 2 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಫ್ರೇಮ್ 10 ರಲ್ಲಿ ಬೇರಿಂಗ್ಗಳ ಮೇಲೆ ಜೋಡಿಸಲಾಗಿದೆ, ಅಕ್ಷ 3 ರ ಮೂಲಕ ಡ್ರೈವಿಂಗ್ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 4 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ಪ್ರತಿಯಾಗಿ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ ಮಧ್ಯಂತರ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 5 ಗೆ ಅಕ್ಷಗಳು 3 ಮತ್ತು ಚಾಲಿತ ಒಂದು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 6, ಇವುಗಳನ್ನು ಅನುಕ್ರಮವಾಗಿ ರಾಕರ್ ಆರ್ಮ್ 6 ಮತ್ತು ಸ್ಲೈಡರ್ 9 ಗೆ ಅಕ್ಷಗಳು 3 ಮೂಲಕ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಸ್ಲೈಡರ್ 9 ರ ಪರಸ್ಪರ ಚಲನೆಯ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸಲು, ರಾಕರ್ ಆರ್ಮ್ 6 ಅನ್ನು ಸ್ಥಾನ A ನಿಂದ ಸ್ಥಾನ B ಗೆ ಮತ್ತು ಪ್ರತಿಯಾಗಿ ಸರಿಸಲಾಗುತ್ತದೆ, ಅದರ ನಂತರ ಅದನ್ನು ನಿವಾರಿಸಲಾಗಿದೆ (ತಾಳವನ್ನು ಅಂಜೂರ 14 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ).

ಅಕ್ಕಿ. 15. ಹಿಂಗ್ಡ್ ಮತ್ತು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಹೊಂದಿರುವ ಹೆಲಿಕಾಪ್ಟರ್ ಸ್ವಾಶ್ಪ್ಲೇಟ್ನ ವಿನ್ಯಾಸ ರೇಖಾಚಿತ್ರ.
ಅಂಜೂರದಲ್ಲಿ. ಹೆಲಿಕಾಪ್ಟರ್ನ ಮುಖ್ಯ ರೋಟರ್ನ ಬ್ಲೇಡ್ಗಳನ್ನು ನಿಯಂತ್ರಿಸುವ ಕಾಂಪ್ಯಾಕ್ಟ್ ಸ್ವಯಂಚಾಲಿತ ಸ್ವ್ಯಾಶ್ಪ್ಲೇಟ್ನ ಮೂಲ ವಿನ್ಯಾಸವನ್ನು ಚಿತ್ರ 15 ತೋರಿಸುತ್ತದೆ, ಹಿಂಗ್ಡ್ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಆಧಾರದ ಮೇಲೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಇದು ಮುಖ್ಯ ರೋಟರ್ ಬ್ಲೇಡ್ಗಳನ್ನು ನಿಯಂತ್ರಿಸುವ ಹಿಂಗ್ಡ್ ರಾಡ್ಗಳು 2 ನೊಂದಿಗೆ ತಿರುಗುವ ರಿಂಗ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ ಮತ್ತು ಸ್ಪ್ಲೈನ್ - ಹಿಂಜ್ 3 ಅನ್ನು ಬಾಲ್ ಬೇರಿಂಗ್ ಮೂಲಕ ತಿರುಗಿಸದ ರಿಂಗ್ 5 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ 4. ಸ್ಪ್ಲೈನ್ನ ಡ್ರೈವ್ - ಹಿಂಜ್ 3 ಹೆಲಿಕಾಪ್ಟರ್ ರೋಟರ್ ಡ್ರೈವ್ ಗೇರ್ಬಾಕ್ಸ್ನ ಶಾಫ್ಟ್ 6 ನಲ್ಲಿ ನಿವಾರಿಸಲಾಗಿದೆ. ತಿರುಗದ ಉಂಗುರ 5 ರಂದು, ಬೆರಳುಗಳು 7 ಮತ್ತು 8 ಮತ್ತು ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ಗಳು 9 ಮತ್ತು 10 ಅನ್ನು ಬಳಸಿ, ಫ್ರೇಮ್ 11 ಚಲಿಸುತ್ತದೆ. ಫ್ರೇಮ್ 11 ರಂದು, 12 ಮತ್ತು 13 ಬೆರಳುಗಳನ್ನು ಮತ್ತು 14 ಮತ್ತು 15 ಪಾಯಿಂಟ್ಗಳಲ್ಲಿ ಗೋಲಾಕಾರದ ಬೇರಿಂಗ್ಗಳನ್ನು ಬಳಸಿ TO
ಮತ್ತು ಎಂ
ಲಿವರ್ 16 ಅನ್ನು ಸರಿಪಡಿಸಲಾಗಿದೆ, ಇದು ರೇಡಿಯಲ್ ಪ್ಲೇನ್ ಬೇರಿಂಗ್ಗಳು 19 ಮತ್ತು 20 ಮತ್ತು ಥ್ರಸ್ಟ್ ಬೇರಿಂಗ್ಗಳು 21 ಮತ್ತು 22 ಅನ್ನು ಬ್ರಾಕೆಟ್ನಲ್ಲಿ ಪಿನ್ 17 ಮೂಲಕ 18 ಗೇರ್ಬಾಕ್ಸ್ ಹೌಸಿಂಗ್ನಲ್ಲಿ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ 23. ಲಿವರ್ 16 ಅನ್ನು ಎರಡು ತೋಳುಗಳು ಮತ್ತು ಅದರ ಚಾಲನೆಯಿಂದ ಮಾಡಲಾಗಿದೆ ಬ್ಲೇಡ್ ಸ್ಕ್ರೂನ ಸಾಮಾನ್ಯ ಪಿಚ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲು ತೋಳನ್ನು ರಾಡ್ 24 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ರೇಖಾಂಶ ಮತ್ತು ಪಾರ್ಶ್ವದ ನಿಯಂತ್ರಣ ರಾಡ್ಗಳು 25 ಮತ್ತು 26 ಸಾಮೂಹಿಕ ಪಿಚ್ ಕಂಟ್ರೋಲ್ ರಾಡ್ 24 ಗೆ ಹೋಲಿಸಿದರೆ ವಿರುದ್ಧ ಬದಿಗಳಲ್ಲಿ ತಿರುಗದ ರಿಂಗ್ 5 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿವೆ. ಯಂತ್ರದ ವಿನ್ಯಾಸದಲ್ಲಿ ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ಗಳು 9, 10, 14, 15 ರ ಉಪಸ್ಥಿತಿಯು ಗೋಳದ ಉದ್ದಕ್ಕೂ ತಿರುಗುವ ರಿಂಗ್ 1 ರ ತಿರುಗುವಿಕೆಯನ್ನು ಖಾತ್ರಿಗೊಳಿಸುತ್ತದೆ, ಇದು ಹೆಲಿಕಾಪ್ಟರ್ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯ ಸಾಮಾನ್ಯ ಕಾರ್ಯಾಚರಣೆಗೆ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ಗಳು 9 ಮತ್ತು 10 ರ ಕೇಂದ್ರಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ ಅಕ್ಷ ಜಿ
ಮತ್ತು ಡಿ
ಮತ್ತು ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ 14 ಮತ್ತು 15 ರ ಕೇಂದ್ರಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ ಅಕ್ಷ TO
ಮತ್ತು ಎಂ
ಪರಸ್ಪರ ಲಂಬವಾಗಿ, ಮತ್ತು ಫ್ರೇಮ್ 11 ಮತ್ತು ಲಿವರ್ 16 ರ ಸ್ಥಳ, ಪ್ರೊಪೆಲ್ಲರ್ ಬ್ಲೇಡ್ಗಳ ಒಟ್ಟಾರೆ ಪಿಚ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲು ಮತ್ತು ಡ್ರೈವ್ ಶಾಫ್ಟ್ 6 ರ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸ್ಥಳಾಂತರ ಮತ್ತು ತಿರುಗುವಿಕೆಯಿಂದ ತಿರುಗದ ರಿಂಗ್ 5 ಅನ್ನು ಇರಿಸಿಕೊಳ್ಳಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ, ಇದು ಅನಿಯಂತ್ರಿತವಾಗಿದೆ ಯಂತ್ರದ ರೇಖಾಂಶ ಮತ್ತು ಅಡ್ಡ ನಿಯಂತ್ರಣದ ಸಮತಲ - ಓರೆ. ಲಿವರ್ 16 ರ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷವು ಬಿಂದುಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿರುತ್ತದೆ TO
ಮತ್ತು ಎಂ
.
ಸ್ವಶ್ಪ್ಲೇಟ್ ಯಂತ್ರವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಬಿಂದುಗಳ ಚಲನೆಯ ಎರಡು ಅಕ್ಷಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಕಂಟ್ರೋಲ್ ರಾಡ್ 25 ಮತ್ತು 26 ನೊಂದಿಗೆ ತಿರುಗುವ ರಿಂಗ್ 1 ಅನ್ನು ಓರೆಯಾಗಿಸುವುದರ ಮೂಲಕ ಪ್ರೊಪೆಲ್ಲರ್ ಬ್ಲೇಡ್ಗಳ ಸೈಕ್ಲಿಕ್ ಪಿಚ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ. ಎ
ಮತ್ತು IN
. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ಗಳು 9 ಮತ್ತು 10 ರಲ್ಲಿ ತಿರುಗುವ ರಿಂಗ್ 1 ಮತ್ತು ತಿರುಗದ ರಿಂಗ್ 5 ಫ್ರೇಮ್ 11 ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಗೋಳಾಕಾರದ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ತಿರುಗುವ ರಿಂಗ್ 1 ಮತ್ತು ತಿರುಗದ ರಿಂಗ್ 5 ಜೊತೆಗೆ ಫ್ರೇಮ್ 14 ಮತ್ತು 15 ಲಿವರ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ 16. ಪ್ರೊಪೆಲ್ಲರ್ ಬ್ಲೇಡ್ಗಳ ಒಟ್ಟಾರೆ ಪಿಚ್ ಅನ್ನು ಚಲಿಸುವ ಬಿಂದುಗಳಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ ಪ
ಸಾಮೂಹಿಕ ಪಿಚ್ನ ನಿಯಂತ್ರಣ ರಾಡ್ನಿಂದ ಲಿವರ್ 16 24. ಲಿವರ್ 16 ಅನ್ನು ಬ್ರಾಕೆಟ್ 18 ನಲ್ಲಿ ಹಿಂಜ್ ಮಾಡಿರುವುದರಿಂದ, ಗೇರ್ಬಾಕ್ಸ್ ಹೌಸಿಂಗ್ 23 ಮೇಲೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ತಿರುಗದ ರಿಂಗ್ 5 ಅನ್ನು ಸ್ಥಳಾಂತರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ರೇಡಿಯಲ್ ಆಗಿ ತಿರುಗಿಸಲಾಗುತ್ತದೆ ಆರ್
ಬ್ರಾಕೆಟ್ 18 ರ ಅಕ್ಷದ ಮೂಲಕ ಹಾದುಹೋಗುವ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಮತ್ತು ಶಾಫ್ಟ್ 6 ರ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಅತ್ಯಲ್ಪ ಪ್ರಮಾಣದಲ್ಲಿ ಸ್ಥಳಾಂತರಿಸಲಾಗುತ್ತದೆ. ಪ್ರೊಪೆಲ್ಲರ್ ಬ್ಲೇಡ್ಗಳ ಸಾಮಾನ್ಯ ಮತ್ತು ಸೈಕ್ಲಿಕ್ ಪಿಚ್ ಅನ್ನು ಜಂಟಿಯಾಗಿ ನಿಯಂತ್ರಿಸುವಾಗ, ಅಂಕಗಳು ಏಕಕಾಲದಲ್ಲಿ ಚಲಿಸುತ್ತವೆ ಎ, ಬಿ
ಮತ್ತು ಪ
. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ಥಿರ ರಿಂಗ್ 5 ಮತ್ತು ಚಲಿಸಬಲ್ಲ ರಿಂಗ್ 1 ರ ಏಕಕಾಲಿಕ ಟಿಲ್ಟ್ ಮತ್ತು ಚಲನೆ ಸಂಭವಿಸುತ್ತದೆ.
ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳು
ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಎರಡು ನಿರ್ದಿಷ್ಟ ಲಿಂಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ: ರಾಕರ್ ಮತ್ತು ರಾಕರ್ ಕಲ್ಲು (ಅಂಜೂರ 16 ನೋಡಿ), ಪ್ರತಿಯೊಂದೂ, ತಿರುಗುವ ಅಥವಾ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ, ಪರಸ್ಪರ ಸಂಬಂಧಿತವಾಗಿ ಕ್ರಮೇಣ ಚಲಿಸುತ್ತದೆ. ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ ಅಂತಹ ಎರಡು ಲಿಂಕ್ಗಳ ಉಪಸ್ಥಿತಿಯು ಅದರ ಮುಂದಕ್ಕೆ ಮತ್ತು ಹಿಮ್ಮುಖ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಚಾಲಿತ ಲಿಂಕ್ನ ಚಲನೆಯ ವಿಭಿನ್ನ ವೇಗಗಳಿಗೆ ಕಾರಣವಾಗುತ್ತದೆ, ಇದು ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಕಾರ್ಯವಿಧಾನದ ಪ್ರಯೋಜನವಾಗಿದೆ, ಮತ್ತು ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಅನಾನುಕೂಲತೆ ಮತ್ತು ಸಾಮಾನ್ಯವಾಗಿ ಪ್ರದೇಶವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಅದರ ಬಳಕೆ. ರಾಕರ್ ಮಾಡುವ ಚಲನೆಯಲ್ಲಿ ಭಿನ್ನವಾಗಿರುವ ಎರಡು ಮುಖ್ಯ ವಿಧದ ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳಿವೆ; ಇವು ರಾಕರ್ನ ರಾಕಿಂಗ್ ಮತ್ತು ತಿರುಗುವಿಕೆಯ ಚಲನೆಯನ್ನು ಹೊಂದಿರುವ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ.

ಅಕ್ಕಿ. 16. ರಾಕರ್ ಕಾರ್ಯವಿಧಾನಗಳ ವಿಧಗಳು
ಅಂಜೂರದಲ್ಲಿ. 16a ತೋರಿಸಲಾಗಿದೆ ದೃಶ್ಯಗಳ ರಾಕಿಂಗ್ ಚಲನೆಯೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆ
ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಅದರಲ್ಲಿ ರಾಕರ್ ಸ್ಟೋನ್ 3 ಅನ್ನು ಅಕ್ಷದ 2 ನಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ, ಇದು ರಾಕರ್ 4 ರ ತೋಡಿನಲ್ಲಿ ಅನುವಾದ ಚಲನೆಯ ಸಾಧ್ಯತೆಯನ್ನು ಹೊಂದಿದೆ, ಅಕ್ಷ 5 ರ ಮೂಲಕ ಸ್ಥಾಯಿ ಸ್ಟ್ಯಾಂಡ್ ಮೇಲೆ ಪ್ರಮುಖವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ರಾಕಿಂಗ್ ಮಾಡುತ್ತದೆ ಕ್ರ್ಯಾಂಕ್ 1 ತಿರುಗಿದಾಗ ಚಲನೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಕ್ರ್ಯಾಂಕ್ ಪ್ರತಿ ಮೂಲೆಗೆ 1 ತಿರುಗಿದಾಗ ರಾಕರ್ 4 ಫಾರ್ವರ್ಡ್ ಸ್ಟ್ರೋಕ್ ಮಾಡುತ್ತದೆ ಎ
, ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ ಅನ್ನು ಕೋನದಲ್ಲಿ ತಿರುಗಿಸುವಾಗ ಹಿಮ್ಮುಖ ಸ್ಟ್ರೋಕ್ IN
, ಈ ಕೋನಗಳ ಅಸಮಾನತೆಯಿಂದಾಗಿ ಮುಂದಕ್ಕೆ ಮತ್ತು ಹಿಮ್ಮುಖ ವೇಗದಲ್ಲಿ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಅಂಜೂರದಲ್ಲಿ. 16b ತೋರಿಸಲಾಗಿದೆ ದೃಶ್ಯಗಳ ತಿರುಗುವಿಕೆಯ ಚಲನೆಯೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆ
ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಅದರಲ್ಲಿ ರಾಕರ್ ಸ್ಟೋನ್ 3 ಅನ್ನು ಇರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ರಾಕರ್ 4 ಅನ್ನು ಅಕ್ಷ 2 ರಲ್ಲಿ ಅಕ್ಷ 5 ರ ಮೂಲಕ ಸ್ಥಾಯಿ ಸ್ಟ್ಯಾಂಡ್ನಲ್ಲಿ ಪ್ರಧಾನವಾಗಿ ಜೋಡಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ತಿರುಗಿಸಿದಾಗ ತಿರುಗುವ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. ರಾಕರ್ ಕಾರ್ಯವಿಧಾನದ ಈ ವಿನ್ಯಾಸದೊಂದಿಗೆ, ರಾಕರ್ನ ಮುಂದಕ್ಕೆ ಮತ್ತು ಹಿಮ್ಮುಖ ಚಲನೆಯ ವೇಗದಲ್ಲಿನ ವ್ಯತ್ಯಾಸವನ್ನು ಕೋನಗಳಲ್ಲಿನ ವ್ಯತ್ಯಾಸದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಎ
ಮತ್ತು IN
.
ಅದೇ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಬಳಸಲಾಗುವ ಹಿಂಗ್ಡ್ ಫೋರ್-ಲಿಂಕ್ ಯಾಂತ್ರಿಕತೆಗೆ ಹೋಲಿಸಿದರೆ (ಚಿತ್ರ 3 ನೋಡಿ), ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವು ಡ್ರೈವಿಂಗ್ ಕ್ರ್ಯಾಂಕ್ ಮತ್ತು ಚಾಲಿತ ರಾಕರ್ನ ವಿನ್ಯಾಸವನ್ನು ಸಾಮಾನ್ಯ ಅಕ್ಷಕ್ಕೆ ಸಮ್ಮಿತೀಯವಾಗಿ ಇರಿಸುವ ಮೂಲಕ ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಸುಲಭಗೊಳಿಸುತ್ತದೆ, ಇದು ಕೆಲವೊಮ್ಮೆ ವಿನ್ಯಾಸದ ಸಮಯದಲ್ಲಿ ಅಗತ್ಯ. ಆದರೆ, ಅದೇ ಸಮಯದಲ್ಲಿ, ರಾಕರ್ ಜೋಡಿಯಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಸ್ಲೈಡಿಂಗ್ ಘರ್ಷಣೆಯಿಂದಾಗಿ ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯು ನಷ್ಟವನ್ನು ಹೆಚ್ಚಿಸಿದೆ ಮತ್ತು ಆದ್ದರಿಂದ ಇದನ್ನು ಮುಖ್ಯವಾಗಿ ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ಲಘುವಾಗಿ ಲೋಡ್ ಮಾಡಲಾದ ಸಹಾಯಕ ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಅಕ್ಕಿ. 17. ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯನ್ನು ಬದಲಾಯಿಸುವ ಕೋನ
ಚಾಲಿತ ಲಿಂಕ್ನ ಸ್ವಿಂಗ್.
ಅಂಜೂರದಲ್ಲಿ. 17. ಡ್ರೈವಿಂಗ್ ಲಿಂಕ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಚಾಲಿತ ಲಿಂಕ್ನ ಸ್ವಿಂಗ್ ಕೋನವನ್ನು ಹೆಚ್ಚಿಸಲು ಅಥವಾ ಕಡಿಮೆ ಮಾಡಲು ಬಳಸುವ ರಾಕರ್ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದು ಶಾಫ್ಟ್ 2 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಅದಕ್ಕೆ ಟಾರ್ಕ್ ಅನ್ನು ರವಾನಿಸುತ್ತದೆ, ಅಕ್ಷ 3, ರಾಕರ್ ಸ್ಟೋನ್ 4 ಮತ್ತು ರಾಕರ್ 5 ಅನ್ನು ಅಕ್ಷದ 6 ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ, ಸರಳ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ತಿರುಗಲು ಜೋಡಿಸಲಾಗಿದೆ. ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಕೋನದಲ್ಲಿ ತಿರುಗಿಸಿದಾಗ ಎ ಸ್ಕ್ರೂ 5 ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ IN , ಇದು, ಕ್ರ್ಯಾಂಕ್ 1 ರ ಉದ್ದಗಳ ನಿರ್ದಿಷ್ಟ ಅನುಪಾತಕ್ಕೆ, ಲಿಂಕ್ 5 ಮತ್ತು ಅವುಗಳ ನಡುವಿನ ಅಂತರವು ದ್ವಿಗುಣಗೊಳ್ಳುತ್ತದೆ. ಮತ್ತು, ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ಡ್ರೈವ್ ಲಿಂಕ್ 5, ಕ್ರ್ಯಾಂಕ್ 1 ಅರ್ಧದಷ್ಟು ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ.
ಅಕ್ಕಿ. 18. ಕ್ರಾಸ್-ಪ್ಲಾನಿಂಗ್ ಯಂತ್ರವನ್ನು ಚಾಲನೆ ಮಾಡಲು ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆ.
ಆದಾಗ್ಯೂ, ಹಲವಾರು ಸಂದರ್ಭಗಳಲ್ಲಿ, ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ತಾಂತ್ರಿಕ ಸಲಕರಣೆಗಳ ಪ್ರಚೋದಕವಾಗಿಯೂ ಬಳಸಬಹುದು. ಚಿತ್ರ 18 ರಲ್ಲಿ ತೋರಿಸಿರುವ ಕ್ರಾಸ್-ಪ್ಲಾನಿಂಗ್ ಯಂತ್ರದ ಕ್ಯಾಲಿಪರ್ ಡ್ರೈವ್ ಇದಕ್ಕೆ ಉದಾಹರಣೆಯಾಗಿದೆ. ಇದು ಚೌಕಟ್ಟಿನಲ್ಲಿ ಬೇರಿಂಗ್ಗಳ ಮೇಲೆ ತಿರುಗುವ ಶಾಫ್ಟ್ನಲ್ಲಿ ಅಳವಡಿಸಲಾದ ಕ್ರ್ಯಾಂಕ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಅಕ್ಷ 2 ಮತ್ತು ರಾಕರ್ ಸ್ಟೋನ್ 3 ಮೂಲಕ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ರಾಕರ್ 4, ಅಕ್ಷ 5 ರ ಮೂಲಕ ಚೌಕಟ್ಟಿನಲ್ಲಿ ಪ್ರಧಾನವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಮತ್ತು ಅಕ್ಷ 6 ರ ಸಹಾಯದಿಂದ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 7 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ಅಕ್ಷ 8 ರ ಮೂಲಕ ಸ್ಲೈಡರ್ 9 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ (ಚಿತ್ರ 18a ನೋಡಿ). ಟ್ರಾನ್ಸ್ವರ್ಸ್ ಪ್ಲ್ಯಾನರ್ನ ಆಕ್ಟಿವೇಟರ್ನ ವಿನ್ಯಾಸದಲ್ಲಿ (ಚಿತ್ರ 18b ನೋಡಿ), ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರದಲ್ಲಿ ಪಟ್ಟಿ ಮಾಡಲಾದ ಲಿಂಕ್ಗಳ ಜೊತೆಗೆ, ವಿಕೇಂದ್ರೀಯತೆಯನ್ನು ಸರಿಹೊಂದಿಸಲು ಗೇರ್ 1 - 2, ಸ್ಕ್ರೂ 8 ರೂಪದಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ ಡ್ರೈವ್ ಅನ್ನು ಒದಗಿಸಲಾಗುತ್ತದೆ. ಕ್ರ್ಯಾಂಕ್ ಅಕ್ಷದ 4, ಅದರ ಮೌಲ್ಯವು ಕ್ಯಾರೇಜ್ 12 (ಸ್ಲೈಡರ್) ನ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ , ಲೀಡ್ ಸ್ಕ್ರೂ 13 ಮತ್ತು ಕ್ಲಾಂಪ್ 14 ಅದರ ಸ್ಥಾನವನ್ನು ಸರಿಪಡಿಸುವುದು ಯಂತ್ರದ ಕ್ಯಾರೇಜ್ 12 ರ ಆರಂಭಿಕ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ಅವಶ್ಯಕವಾಗಿದೆ.

ಅಕ್ಕಿ. 19. ಪ್ರೆಸ್ನ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆ.
ಪ್ರೆಸ್ನ ಕ್ರ್ಯಾಂಕ್-ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಆಕ್ಯೂವೇಟರ್ ಅನ್ನು ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯೊಂದಿಗೆ ಬದಲಾಯಿಸುವುದರಿಂದ ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ ಮತ್ತು ಸ್ಲೈಡರ್ ನಡುವಿನ ಅಂತರವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ, ಜೊತೆಗೆ ಪ್ರೆಸ್ನ ಅಂತರ-ಸ್ಟಾಂಪ್ ಜಾಗದ ಗಾತ್ರವನ್ನು ಸರಿಹೊಂದಿಸುವ ನಿಖರತೆಯನ್ನು ಸರಳಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ಹೆಚ್ಚಿಸುತ್ತದೆ ( ಚಿತ್ರ 19 ನೋಡಿ). ಇದರ ವಿನ್ಯಾಸವು ಫ್ರೇಮ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಅದರಲ್ಲಿ ಮಾರ್ಗದರ್ಶಿಗಳು 2 ರಲ್ಲಿ ಸ್ಲೈಡರ್ 3 ಅನ್ನು ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ 4 ರಾಕರ್ ಸ್ಟೋನ್ 5 ಮೂಲಕ, ರೋಲರ್ಗಳು 7 ಮತ್ತು ರಾಕರ್ 6 ಸ್ಲೈಡರ್ 3 ಒಳಗೆ ಇದೆ ಮತ್ತು ಅದರ ಮೂಲಕ ಸಂಪರ್ಕದಲ್ಲಿದೆ ಕೀ 9 ಮತ್ತು ಸ್ಕ್ರೂ 8. ಹಿಂಭಾಗದ 6 ರ ತೋಡಿನಲ್ಲಿ ಕಲ್ಲು 5 ಅನ್ನು ಸ್ಲೈಡಿಂಗ್ ಮಾಡಲು ಮಾತ್ರ ಅಗತ್ಯವಿರುವ ಕನಿಷ್ಟ ಅಂತರದ ಕಲ್ಲು 5 ಮತ್ತು ಹಿಂಭಾಗದ 6 ರ ಸಂಪರ್ಕವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಅವುಗಳ ನಡುವೆ ಬೆಣೆ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಇವುಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಬೆಣೆ 10 ಮತ್ತು ಹೊಂದಾಣಿಕೆ ಸ್ಕ್ರೂ 11. ಇಂಟರ್ಸ್ಟ್ಯಾಂಪ್ ಜಾಗದ ಗಾತ್ರದ ನಿಖರವಾದ ಹೊಂದಾಣಿಕೆಗಾಗಿ, ಸ್ಕ್ರೂ 8 ಅನ್ನು ಒದಗಿಸಲಾಗಿದೆ, ಇದರ ತಿರುಗುವಿಕೆಯು ಸ್ಲೈಡರ್ನ ಇಳಿಜಾರಾದ ತೋಡು ಉದ್ದಕ್ಕೂ ಹಿಂಬದಿಯ ಬಲ ಅಥವಾ ಎಡಕ್ಕೆ 6 ಚಲನೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ 3 ಇದರಲ್ಲಿ ಅದು ಇದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಸ್ಲೈಡರ್ ಮೇಲಕ್ಕೆ ಅಥವಾ ಕೆಳಕ್ಕೆ ಚಲಿಸುತ್ತದೆ. ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ 4 ತಿರುಗಿದಾಗ, ಕಲ್ಲು 5 ಸಮತಟ್ಟಾದ, ಸಮಾನಾಂತರ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ, ಅದರ ಲಂಬವಾದ ಅಂಶವು ಸ್ಲೈಡರ್ 3 ಗೆ ವರ್ಗಾಯಿಸಲ್ಪಡುತ್ತದೆ, ಏಕೆಂದರೆ ಕಲ್ಲು 5 ರ ತೋಡುಗಳಲ್ಲಿ ಸಮತಲ ದಿಕ್ಕಿನಲ್ಲಿ ರೋಲರುಗಳು 7 ನಲ್ಲಿ ಮುಕ್ತವಾಗಿ ಚಲಿಸುವ ಸಾಮರ್ಥ್ಯದಿಂದಾಗಿ ಸ್ಲೈಡ್ 6.

ಅಕ್ಕಿ. 20. ತಿರುಗುವ ಸ್ಲೈಡ್ನೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆ.
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 20, ಸ್ಲಾಟಿಂಗ್ ಯಂತ್ರಗಳಲ್ಲಿ ರಿಟರ್ನ್ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸಲು ಬಳಸುವ ತಿರುಗುವ ಸ್ಲೈಡ್ನೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆಯನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದನ್ನು ವಿಟ್ವರ್ತ್ ಯಾಂತ್ರಿಕತೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಇದು ಗೇರ್ 1 ಅನ್ನು ಅಕ್ಷ 5 ನಲ್ಲಿರುವ ಗೇರ್ 3 ನೊಂದಿಗೆ ಜೋಡಿಸುತ್ತದೆ ಮತ್ತು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ತಿರುಗುವಿಕೆಯನ್ನು ನೀಡುತ್ತದೆ, ರಾಕರ್ ಸ್ಟೋನ್ 4 ತಿರುಗುವ ರಾಕರ್ 2 ರ ತೋಡುಗೆ ಹೊಂದಿಕೊಳ್ಳುತ್ತದೆ, ಅದರ ಅಕ್ಷವು 6 ಅಕ್ಷದ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ. 5 ಮತ್ತು ವಿಕೇಂದ್ರೀಯತೆಯ ಪ್ರಮಾಣದಿಂದ ಚಕ್ರ 3 ರ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸ್ಥಳಾಂತರಗೊಳ್ಳುತ್ತದೆ ಇ , ಹಾಗೆಯೇ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 7 ಅನ್ನು ಯಂತ್ರ ಸ್ಲೈಡರ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ರಾಕರ್ 2 ರ ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರವು ಗೇರ್ 3 ರ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸರಿದೂಗಿಸಲ್ಪಟ್ಟಿರುವುದರಿಂದ, ಈ ಸಂದರ್ಭದಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ ಆಗಿರುತ್ತದೆ, ರಾಕರ್ ಕಲ್ಲು 4 ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಎ , ಮತ್ತು ಕೋನದಲ್ಲಿ ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ IN . ಏಕೆಂದರೆ ಕೋನ ಎ ಹೆಚ್ಚು ಕೋನ IN ವಿಕೇಂದ್ರೀಯತೆಯ ಪ್ರಮಾಣದಿಂದ ನಿರ್ಧರಿಸಲ್ಪಟ್ಟ ಮೊತ್ತದಿಂದ, ನಂತರ ಸ್ಲೈಡ್ 2 ರ ಹಿಮ್ಮುಖ ವೇಗ ಮತ್ತು ಅದಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 7 ಈ ಕೋನಗಳ ಅನುಪಾತಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ನ ವೇಗಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ.
ಅಕ್ಕಿ. 21. ಚಾಲಿತ ಶಾಫ್ಟ್ಗೆ ಸ್ಟಾಪ್ ಚಲನೆಯನ್ನು ರವಾನಿಸುವ ರಾಕರ್ ಯಾಂತ್ರಿಕತೆ.
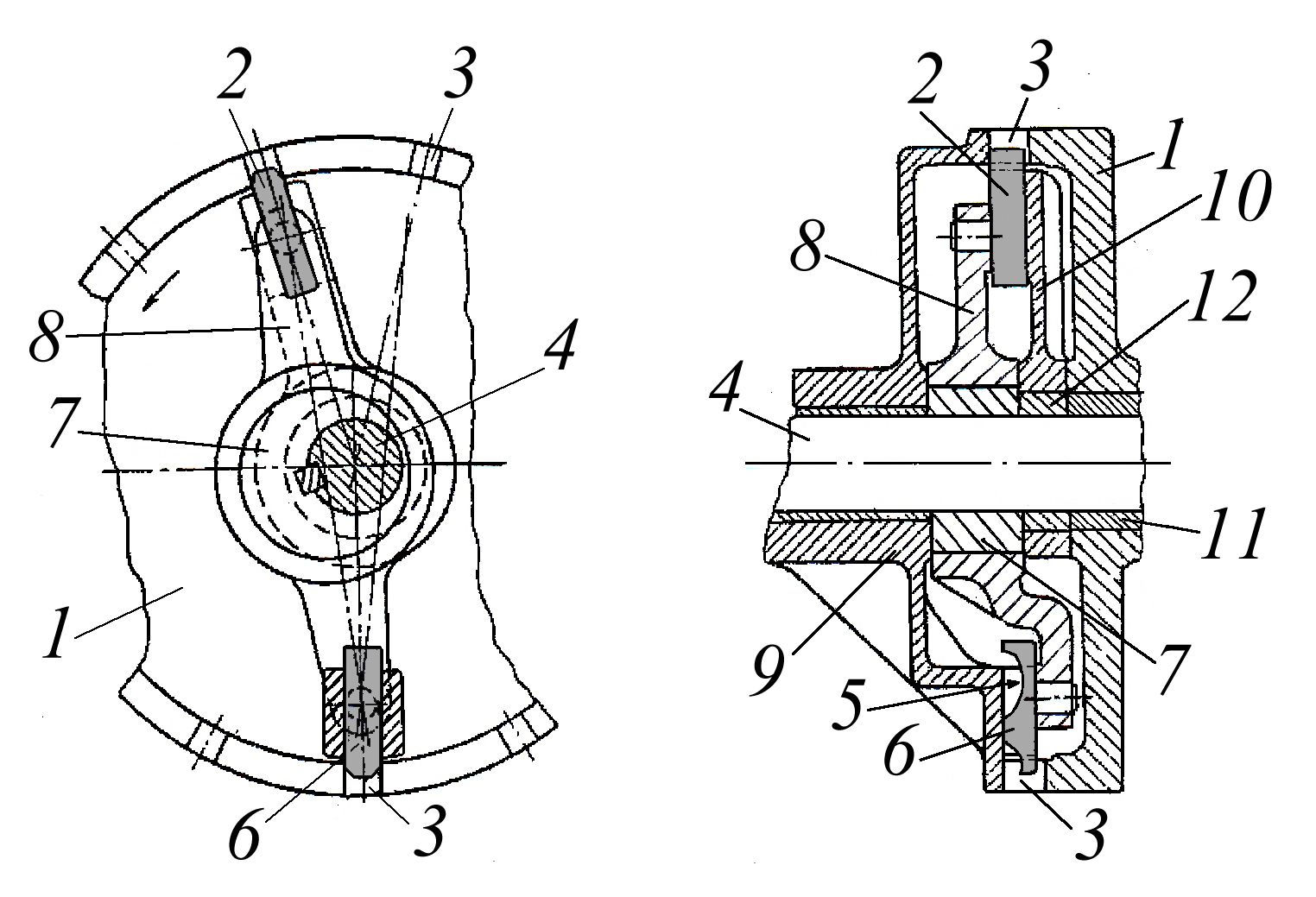
ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ತಿರುಗುವ ಡ್ರೈವ್ ಶಾಫ್ಟ್ನಿಂದ ಮಧ್ಯಂತರವಾಗಿ ತಿರುಗುವ ಚಾಲಿತ ಶಾಫ್ಟ್ಗೆ ತಿರುಗುವಿಕೆಯನ್ನು ರವಾನಿಸಲು ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ಬಳಸಬಹುದು. ಅಂತಹ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸವನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 21. ಇದು ಹೌಸಿಂಗ್ 9 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಡ್ರೈವ್ ಶಾಫ್ಟ್ 4 ಅನ್ನು ವಿಲಕ್ಷಣ 7 ಅನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಅದರ ಮೇಲೆ ಎರಡು-ತೋಳಿನ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 8 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ, ಡ್ರೈವ್ ಸ್ಲೈಡ್ಗಳು 2 ಗೆ ಹಿಂಜ್ ಆಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಮತ್ತು ಫಿಕ್ಸಿಂಗ್ 6, ಹಾಗೆಯೇ ಚಾಲಿತ ಫ್ಲೇಂಜ್ 1 ಅನ್ನು ಸ್ಲೀವ್ 11 ಮತ್ತು ಲಿಂಕ್ 10 ಅನ್ನು ಸ್ಲೀವ್ 12 ನೊಂದಿಗೆ ಮುಕ್ತವಾಗಿ ತಿರುಗಿಸುವ ಸಾಧ್ಯತೆಯೊಂದಿಗೆ ಶಾಫ್ಟ್ 4 ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಫ್ಲೇಂಜ್ 1 ಅನ್ನು ರೇಡಿಯಲ್ ಗ್ರೂವ್ಸ್ 3 ನೊಂದಿಗೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ, ಅದರಲ್ಲಿ, ವಿಲಕ್ಷಣ 7 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 8 ನೊಂದಿಗೆ ತಿರುಗಿಸಿದಾಗ, ಡ್ರೈವ್ ಸ್ಲೈಡ್ 2 ಪರ್ಯಾಯವಾಗಿ ಪ್ರವೇಶಿಸುತ್ತದೆ ಮತ್ತು ಸ್ಥಿರವಾದ ವಸತಿ 9 ರಲ್ಲಿ ಲಂಬವಾದ ತೋಡು 5 ರ ಉದ್ದಕ್ಕೂ ನಿರಂತರವಾಗಿ ಜಾರುವ ಫಿಕ್ಸಿಂಗ್ ಸ್ಲೈಡ್ 6 ಅನ್ನು ನಿಯತಕಾಲಿಕವಾಗಿ ಚಾಲಿತ ಫ್ಲೇಂಜ್ನ ಚಡಿಗಳಲ್ಲಿ ಸೇರಿಸಲಾಗುತ್ತದೆ. 1. ಡ್ರೈವ್ ಶಾಫ್ಟ್ 4 ವಿಲಕ್ಷಣ 7 ನೊಂದಿಗೆ ತಿರುಗಿದಾಗ, ಡಬಲ್-ಆರ್ಮ್ಡ್ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 8 ನಿಯತಕಾಲಿಕವಾಗಿ ಚಾಲಿತ ಫ್ಲೇಂಜ್ 1 ಡ್ರೈವ್ 2 ಮತ್ತು ಫಿಕ್ಸಿಂಗ್ ಸ್ಲೈಡ್ 6 ರ ಚಡಿಗಳಿಂದ 3 ಅನ್ನು ನಿಯತಕಾಲಿಕವಾಗಿ ಸೇರಿಸುತ್ತದೆ ಮತ್ತು ತೆಗೆದುಹಾಕುತ್ತದೆ, ಇದು ಚಾಲಿತ ಫ್ಲೇಂಜ್ ತಿರುಗುವಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ. 1 ಡ್ರೈವ್ ಸ್ಲೈಡ್ 2 ಅನ್ನು ಗ್ರೂವ್ 3 ಗೆ ಸೇರಿಸಿದಾಗ ಮತ್ತು ಚಾಲಿತ ಫ್ಲೇಂಜ್ 1 ಅನ್ನು ಲಾಕಿಂಗ್ ಸ್ಲೈಡ್ 6 ಅನ್ನು ತೋಡಿಗೆ ಸೇರಿಸಿದಾಗ 3. ಚಾಲಿತ ಫ್ಲೇಂಜ್ 1 ರಲ್ಲಿ 3 ಚಡಿಗಳ ಸಂಖ್ಯೆಯು ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ ಅದರ ತಿರುಗುವಿಕೆಯ ವೇಗದ ಅನುಪಾತವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಡ್ರೈವ್ ಶಾಫ್ಟ್ನ ವೇಗ 4. ಡ್ರೈವ್ ಸ್ಲೈಡ್ 2 ರ ಆರಂಭದಲ್ಲಿ ಗ್ರೂವ್ ಚಾಲಿತ ಫ್ಲೇಂಜ್ 1 ಅನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ, ಎರಡನೆಯದು ನಿಧಾನವಾಗಿ ತಿರುಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ನಂತರ ಅದರ ವೇಗವು ತ್ವರಿತವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಸ್ಲೈಡರ್ 2 ನಿಶ್ಚಿತಾರ್ಥದಿಂದ ಹೊರಬರುವ ಹೊತ್ತಿಗೆ ಅದು ಮತ್ತೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಅದು ಯಾಂತ್ರಿಕತೆಯ ಹೆಚ್ಚಿನ ವೇಗದಲ್ಲಿಯೂ ಸಹ ಆಘಾತಗಳು ಮತ್ತು ಪರಿಣಾಮಗಳನ್ನು ನಿವಾರಿಸುತ್ತದೆ.
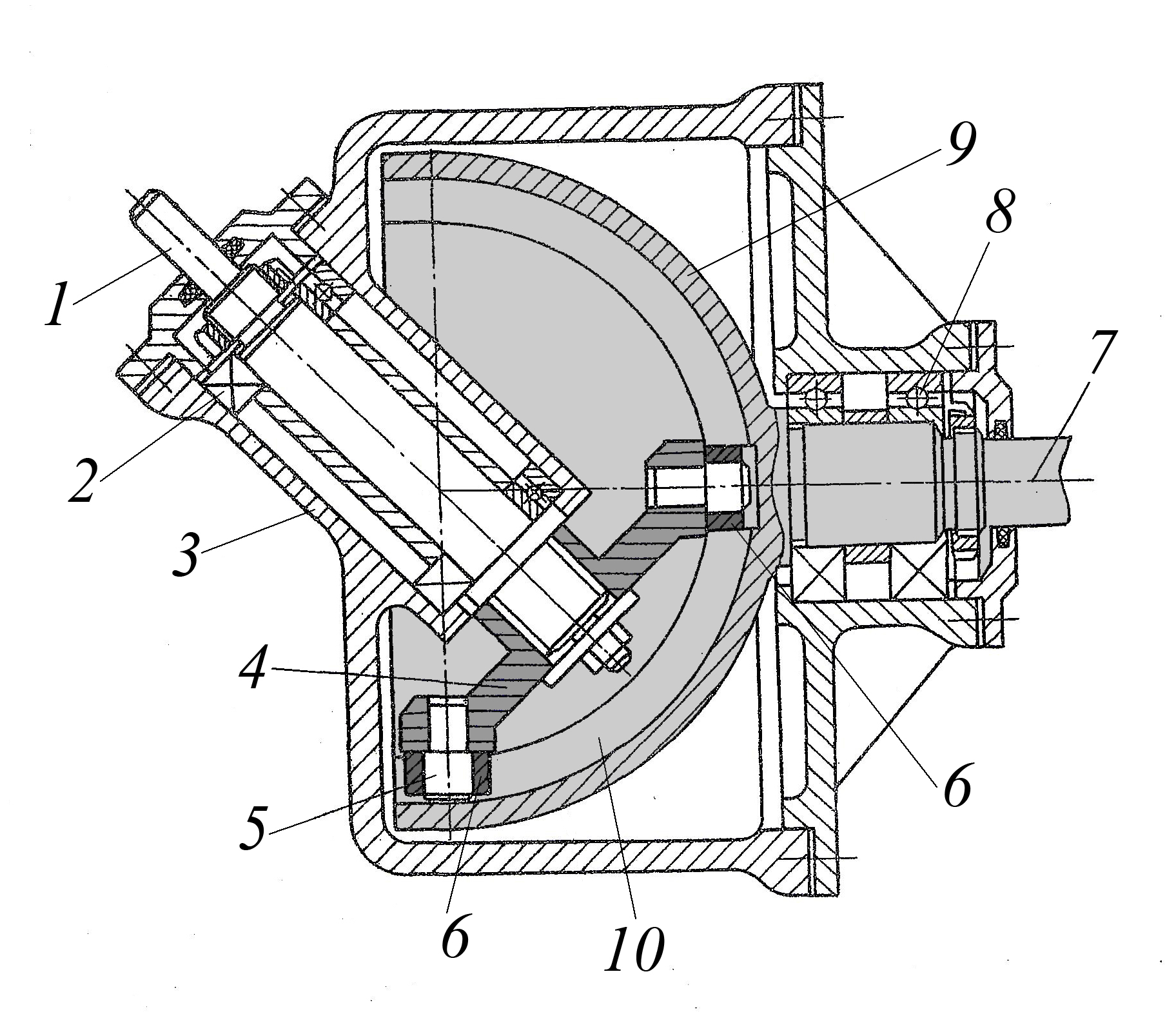
ಚಿತ್ರ 22 ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ, ಡ್ರೈವ್ ಮತ್ತು ಚಾಲಿತ ಶಾಫ್ಟ್ಗಳ ಅಕ್ಷ
ಇದು 45 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ಛೇದಿಸುತ್ತದೆ
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 22 ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದು 45 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ಛೇದಿಸುವ ಶಾಫ್ಟ್ಗಳ ನಡುವೆ ಚಲನೆಯನ್ನು ರವಾನಿಸುತ್ತದೆ. ಈ ಕಾರ್ಯವಿಧಾನವು ಬೇರಿಂಗ್ಗಳು 2 ಮೂಲಕ ಹೌಸಿಂಗ್ 3 ರಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ಡ್ರೈವ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಅದರ ಕೆಳಗಿನ ತುದಿಯಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ 4, ಪೋಷಕ ಕ್ರ್ಯಾಂಕ್ 4, ಆಕ್ಸಲ್ಗಳು 5, ಸ್ಲೈಡರ್ಗಳು 6, ಹಾಗೆಯೇ ಔಟ್ಪುಟ್ ಶಾಫ್ಟ್ 7 ಅನ್ನು ಆರೋಹಿಸಲಾಗಿದೆ. ವಸತಿ 3 ರಲ್ಲಿ ಬೇರಿಂಗ್ಗಳು 8 , ಇದು ಸ್ಲೈಡ್ 9 ನೊಂದಿಗೆ ಒಂದು ತುಣುಕಿನಲ್ಲಿ ಮಾಡಲ್ಪಟ್ಟಿದೆ, ಇದು ಎರಡು ಚಡಿಗಳನ್ನು ಹೊಂದಿದೆ 10 90 ಡಿಗ್ರಿಗಳ ಕೋನದಲ್ಲಿ ಛೇದಿಸುವ ಕ್ರ್ಯಾಂಕ್ 4 ರ ಸ್ಲೈಡರ್ಗಳು 6 ಸಂಪರ್ಕದಲ್ಲಿದೆ.
ಕಾರ್ಯವಿಧಾನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಕ್ರ್ಯಾಂಕ್ 4 ಅನ್ನು ಕೋನದಲ್ಲಿ ತಿರುಗಿಸುವಾಗ 2𝝅
ಸ್ಲೈಡರ್ಗಳು 6 ಚಡಿಗಳ ಉದ್ದಕ್ಕೂ ಚಲಿಸುತ್ತವೆ 10, ಮತ್ತು ಅದೇ ಸಮಯದಲ್ಲಿ ಸ್ಲೈಡ್ ಅನ್ನು ಕೋನದಲ್ಲಿ ತಿರುಗಿಸುತ್ತದೆ 𝝅
, ಹೀಗಾಗಿ, ಕ್ರ್ಯಾಂಕ್ 4 ರಿಂದ ರಾಕರ್ 9 ಗೆ ಗೇರ್ ಅನುಪಾತವು ಸಮಾನವಾಗಿರುತ್ತದೆ 2
. ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸವು ಸ್ಲೈಡ್ 9 ರಿಂದ ಕ್ರ್ಯಾಂಕ್ 4 ಗೆ ಚಲನೆಯನ್ನು ರವಾನಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ (ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಶಾಫ್ಟ್ 7 ಡ್ರೈವಿಂಗ್ ಆಗುತ್ತದೆ ಮತ್ತು ಶಾಫ್ಟ್ 1 ಚಾಲಿತವಾಗುತ್ತದೆ). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಗೇರ್ ಅನುಪಾತವು ಸಮಾನವಾಗಿರುತ್ತದೆ 0,5
.
ಹೆಚ್ಚುವರಿ ಜೊತೆ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು
ರಚನಾತ್ಮಕ ಅಂಶಗಳು
ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳು ಮತ್ತು ಪರಿಕರಗಳ ಭಾಗವಾಗಿ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಬಳಸಿದಾಗ, ಪರಿಣಾಮಕಾರಿ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಹೆಚ್ಚುವರಿ ರಚನಾತ್ಮಕ ಅಂಶಗಳನ್ನು ಅದರಲ್ಲಿ ನಿರ್ಮಿಸಲಾಗಿದೆ, ಇದು ಈ ಕೆಳಗಿನ ಕಾರ್ಯಗಳನ್ನು ಪರಿಹರಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ:
- ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ ಮೌಲ್ಯವನ್ನು ಹೊಂದಿಸಿ (ಸ್ಲೈಡರ್, ಲಿವರ್, ರಾಕರ್),
- ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಆರಂಭಿಕ (ಅಂತಿಮ) ಸ್ಥಾನವನ್ನು ಹೊಂದಿಸಿ,
- ಯಾಂತ್ರಿಕ ಭಾಗಗಳನ್ನು ಹಾನಿಯಿಂದ ರಕ್ಷಿಸಿ,
- ಔಟ್ಪುಟ್ ಲಿಂಕ್ಗೆ ಸಂಕೀರ್ಣ ಚಲನೆಯನ್ನು ಸಂವಹನ ಮಾಡಿ
- ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಆನ್ ಮತ್ತು ಆಫ್ ಮಾಡಿ,
ಅಂತಹ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ರಚನಾತ್ಮಕ ಅನುಷ್ಠಾನದ ಉದಾಹರಣೆಗಳನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ. ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ ಮೌಲ್ಯದ ನಿಯಂತ್ರಣವನ್ನು ಲಿವರ್ ಆರ್ಮ್ಸ್ನ ಅನುಪಾತವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಅಥವಾ ಡ್ರೈವ್ ಕ್ರ್ಯಾಂಕ್ನ ವಿಕೇಂದ್ರೀಯತೆಯ ಮೌಲ್ಯವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಎರಡು ರೀತಿಯಲ್ಲಿ ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ.

ಚಿತ್ರ 23 ಅದರ ಪ್ರಮುಖ ತೋಳಿನ ಉದ್ದವನ್ನು ಸರಿಹೊಂದಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಸಾಧನದ ವಿನ್ಯಾಸ.
ಲೈಟ್-ಲೋಡ್ ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಲಿವರ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸಾಧನದ ವಿನ್ಯಾಸವನ್ನು ಚಿತ್ರ 23 ತೋರಿಸುತ್ತದೆ, ಇದು ಅದರ ಪ್ರಮುಖ ತೋಳಿನ ಉದ್ದವನ್ನು ಸರಿಹೊಂದಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಈ ಲಿವರ್, ಪ್ರಮುಖ 1 ಮತ್ತು ಚಾಲಿತ 2 ತೋಳುಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಮತ್ತು ಅಕ್ಷ 3 ನಲ್ಲಿ ಅಳವಡಿಸಲಾಗಿದೆ, ಅಂತರ್ನಿರ್ಮಿತ ಪಿನ್ 6 ಅನ್ನು ಹೊಂದಿದೆ, ಅಕ್ಷ 5 ಮೂಲಕ ಡ್ರೈವಿಂಗ್ ರಾಡ್ 4 ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ ಮತ್ತು ಗ್ರೂವ್ 10 ರಲ್ಲಿ ಅಗತ್ಯವಿರುವ ಸ್ಥಾನದಲ್ಲಿ ಸ್ಥಿರವಾಗಿದೆ ಮತ್ತು ಹೊಂದಾಣಿಕೆ ಸ್ಕ್ರೂ 7 ಆಗಿದೆ ಅದರ ಥ್ರೆಡ್ ರಂಧ್ರಕ್ಕೆ ಸೇರಿಸಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಲಿವರ್ನ ಚಾಲಿತ ತೋಳು 2 ಅನ್ನು ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಚಾಲಿತ ಲಿಂಕ್ಗೆ ಅಕ್ಷ 8 ಮೂಲಕ ಕೀಲು ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಲಿವರ್ನ ಲೀಡಿಂಗ್ ಆರ್ಮ್ 1 ರ ಉದ್ದವನ್ನು ಸರಿಹೊಂದಿಸುವಾಗ, ನಟ್ 9 ಅನ್ನು ತಿರುಗಿಸಲಾಗುತ್ತದೆ, ನಂತರ ಪಿನ್ 6 ಅನ್ನು ಹೊಂದಾಣಿಕೆ ಸ್ಕ್ರೂ 7 ಅನ್ನು ಬಳಸಿಕೊಂಡು ಲಿವರ್ನ ಲೀಡಿಂಗ್ ಆರ್ಮ್ 1 ರ ತೋಡಿನ ಉದ್ದಕ್ಕೂ ಒಂದು ಬದಿಗೆ ಅಥವಾ ಇನ್ನೊಂದಕ್ಕೆ ಸರಿಸಲಾಗುತ್ತದೆ, ಮತ್ತು ನಂತರ ಪಿನ್ 6 ಅನ್ನು ನಂತರ ನಟ್ 9 ನೊಂದಿಗೆ ಲಾಕ್ ಮಾಡಲಾಗಿದೆ.
ಚಿತ್ರ 24 ಅದರ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ಸರಿಹೊಂದಿಸಲು ಸಾಧನದೊಂದಿಗೆ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ
ಚಿತ್ರ 24 ಅದರ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ಸರಿಹೊಂದಿಸಲು ಅಂತರ್ನಿರ್ಮಿತ ಸಾಧನದೊಂದಿಗೆ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದು ಡ್ರೈವ್ ಆರ್ಮ್ನ ಹೊಂದಾಣಿಕೆಯ ಉದ್ದದೊಂದಿಗೆ ಮಧ್ಯಂತರ ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ ರೂಪದಲ್ಲಿ ಮಾಡಲ್ಪಟ್ಟಿದೆ. ಇದು ಡ್ರೈವ್ ಅನ್ನು ಒಳಗೊಂಡಿದೆ. ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1, ಅದರ ಕ್ರ್ಯಾಂಕ್ನಲ್ಲಿ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಅಕ್ಷ 3 ರ ಮೂಲಕ ಮಧ್ಯಂತರ ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 5 ಮೂಲಕ ಫ್ರೇಮ್ನಲ್ಲಿ ಅಕ್ಷ 6 ಮೂಲಕ ಮತ್ತು ಅಕ್ಷ 7 ಮೂಲಕ ಚಾಲಿತ ರಾಡ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ 8. ನಲ್ಲಿ ಅದೇ ಸಮಯದಲ್ಲಿ, ಅಕ್ಷ 9 ರ ಮೂಲಕ ಮಧ್ಯಂತರ ಲಿವರ್ 5 ನಲ್ಲಿ, ಸೀಸದ ಸ್ಕ್ರೂ 10 ಅನ್ನು ಹಿಂಗ್ಡ್ ಆಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಅದರ ಮೇಲೆ ಅಡಿಕೆ ಇದೆ (ಚಿತ್ರ 34 ರಲ್ಲಿನ ಅಡಿಕೆ ತೋರಿಸಲಾಗಿಲ್ಲ) ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ರ ಅಕ್ಷ 3 ಕ್ಕೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ ಮತ್ತು ಹೊಂದಿದೆ ಮಧ್ಯಂತರ ಲಿವರ್ನ ತ್ರಿಜ್ಯದ ಗ್ರೂವ್ 4 ರಲ್ಲಿ ಚಲಿಸುವ ಸಾಮರ್ಥ್ಯ, ಸ್ಲೈಡರ್ನಂತೆ 5. ಸೀಸದ ತಿರುಪು 10 ತಿರುಗಿದಾಗ, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ αi ಇದು ಮಧ್ಯಂತರ ಲಿವರ್ 5 ರ ಪ್ರಮುಖ ತೋಳಿನ ಗಾತ್ರದಲ್ಲಿ ಬದಲಾವಣೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ಚಾಲಿತ ಮತ್ತು ಚಾಲನಾ ತೋಳುಗಳ ಉದ್ದಗಳ ಬದಲಾಗುತ್ತಿರುವ ಅನುಪಾತವು ಯಾಂತ್ರಿಕತೆಯ ಚಾಲಿತ ರಾಡ್ 8 ರ ಸ್ಟ್ರೋಕ್ ಮೌಲ್ಯವನ್ನು ಬದಲಾಯಿಸಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಕಾರ್ಯವಿಧಾನದ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ಸರಿಹೊಂದಿಸಲು ಪರಿಗಣಿಸಲಾದ ಸಾಧನವು ಈ ಹಿಂದೆ ಚರ್ಚಿಸಿದ್ದಕ್ಕಿಂತ ಅನುಕೂಲಕರವಾಗಿ ಭಿನ್ನವಾಗಿದೆ, ಇದು ಹೊಂದಾಣಿಕೆಗಳನ್ನು ಮಾಡುವಾಗ, ಔಟ್ಪುಟ್ ಲಿಂಕ್ (ರಾಡ್ 8) ನ ಆರಂಭಿಕ ಸ್ಥಾನವನ್ನು ನಿರ್ವಹಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ, ಇದು ಉಪಸ್ಥಿತಿಯಿಂದ ಖಾತ್ರಿಪಡಿಸಲ್ಪಡುತ್ತದೆ. ತ್ರಿಜ್ಯದ ಗ್ರೂವ್ 4 ರ ಮಧ್ಯಂತರ ಲಿವರ್ 5, ಅದರ ಮಧ್ಯಭಾಗವು ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ರ ಅಕ್ಷದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ, ಹೊಂದಾಣಿಕೆಗಳನ್ನು ಮಾಡುವಾಗ, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 2 ಅನ್ನು ತಿರುಗಿಸುವುದು ಮಧ್ಯಂತರ ಲಿವರ್ 5 ರ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸುವುದಿಲ್ಲ.

ಅಕ್ಕಿ. 25. ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ ವಿನ್ಯಾಸ, ಹೊಂದಾಣಿಕೆಯ ವಿಕೇಂದ್ರೀಯ ಮೌಲ್ಯದೊಂದಿಗೆ.
ಅಂಜೂರದಲ್ಲಿ. 25 ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದರಲ್ಲಿ ಶಾಫ್ಟ್ನ ಅನುಗುಣವಾದ ಮೇಲ್ಮೈಯಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ವಿಲಕ್ಷಣ ತೋಳನ್ನು ತಿರುಗಿಸುವ ಮೂಲಕ ಅದರ ವಿಕೇಂದ್ರೀಯತೆಯನ್ನು ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ. ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ಪ್ರಸ್ತಾವಿತ ವಿನ್ಯಾಸವು ಶಾಫ್ಟ್ 2 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದರಲ್ಲಿ ವಿಲಕ್ಷಣ ಕುತ್ತಿಗೆ 1 ರಲ್ಲಿ ವಿಲಕ್ಷಣ ತೋಳು 3 ಇರುತ್ತದೆ, ಒಳಗಿನ ಸಿಲಿಂಡರಾಕಾರದ ಮೇಲ್ಮೈಯಲ್ಲಿ ಚಡಿಗಳು 4 ಇದ್ದು, ಅದರೊಳಗೆ ಕೀ 5 ಹೊಂದಿಕೊಳ್ಳುತ್ತದೆ, ಇದು ತೋಡು 8 ರಲ್ಲಿದೆ. ವಿಲಕ್ಷಣ ಕುತ್ತಿಗೆ 1 ಮತ್ತು ಬೆರಳುಗಳ ಮೇಲೆ ವಿಶ್ರಾಂತಿ 6 ಸ್ಪ್ರಿಂಗ್ಗಳಿಂದ ಸ್ಪ್ರಿಂಗ್-ಲೋಡ್ ಮಾಡಲಾಗಿದೆ 7 ಈ ಸಂದರ್ಭದಲ್ಲಿ, 9 ಮತ್ತು 10 ನೇ ಉಂಗುರಗಳನ್ನು ಕೀ 5 ರ ತುದಿಗಳಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಪ್ರತಿಯೊಂದರ ಮೇಲೆ 11 ರ ಒಳಗೆ ಬಿಡುವು ಇರುತ್ತದೆ, ಸುರುಳಿಯಾಕಾರದ ಮೇಲ್ಮೈಯಿಂದ ಸೀಮಿತವಾಗಿರುತ್ತದೆ 16 ಜೊತೆಗೆ ತೋಡಿನ ಎತ್ತರಕ್ಕೆ ಸಮಾನವಾದ ಗರಿಷ್ಠ ಆಳ 4. ಉಂಗುರಗಳು 9 ಮತ್ತು 10 ರ ಅಕ್ಷೀಯ ಸ್ಥಿರೀಕರಣಕ್ಕಾಗಿ ಮತ್ತು ವಿಲಕ್ಷಣವಾದ ಚಡಿಗಳಲ್ಲಿ ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 3 ಗಾಗಿ ಶಾಫ್ಟ್ 2 ರ ಜರ್ನಲ್ಗಳು 1 ಅರ್ಧ ಉಂಗುರಗಳು 12 ಅನ್ನು ಹೊಂದಿದ್ದು, ಅವುಗಳಲ್ಲಿ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿವಾರಿಸಲಾಗಿದೆ, ಮತ್ತು ರೇಡಿಯಲ್ ದಿಕ್ಕಿನಲ್ಲಿ ಸ್ಥಿರೀಕರಣಕ್ಕಾಗಿ, 9 ಮತ್ತು 10 ರ ಉಂಗುರಗಳಲ್ಲಿ ಸ್ಪ್ರಿಂಗ್-ಲೋಡೆಡ್ ಬಾಲ್ ಹಿಡಿಕಟ್ಟುಗಳು 13 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ. ಉಂಗುರಗಳನ್ನು ತಿರುಗಿಸಲು, ರಂಧ್ರಗಳು 14 ಅನ್ನು ಅವುಗಳಲ್ಲಿ ತಯಾರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ವಿಲಕ್ಷಣ ತೋಳು 3 ರ ತಿರುಗುವಿಕೆಗಾಗಿ, ರಂಧ್ರಗಳು 15 ಅನ್ನು ಅದರಲ್ಲಿ ಮಾಡಲಾಗುತ್ತದೆ. .
ವಿಲಕ್ಷಣ ತೋಳು 3 ಅನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಹೊಂದಿಸಲಾಗಿದೆ. 9 ಮತ್ತು 10 ರ ಉಂಗುರಗಳನ್ನು ರಾಡ್ ಅಥವಾ ಕ್ರೌಬಾರ್ ಅನ್ನು ಸೇರಿಸಲಾದ ರಂಧ್ರಗಳ ಮೂಲಕ ತಿರುಗಿಸಲಾಗುತ್ತದೆ, ಅದರಲ್ಲಿ ಕೀ 5 ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ವಿಲಕ್ಷಣ ತೋಳು 4 ರ ಗ್ರೂವ್ 4 ನಿಂದ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ. ಇದರ ನಂತರ, ವಿಲಕ್ಷಣ ತೋಳು 3 ಅನ್ನು ಅಗತ್ಯವಿರುವ ಕೋನಕ್ಕೆ ತಿರುಗಿಸಲಾಗುತ್ತದೆ. ಇದರ ಪರಿಣಾಮವಾಗಿ ಶಾಫ್ಟ್ 2 ರ ವಿಕೇಂದ್ರೀಯತೆಯ ಮೌಲ್ಯವು ಬದಲಾಗುತ್ತದೆ. ನಂತರ 9 ಮತ್ತು 10 ನೇ ಉಂಗುರಗಳನ್ನು ಅದೇ ರೀತಿಯಲ್ಲಿ ತಿರುಗಿಸಲಾಗುತ್ತದೆ, ಕೀ 5 ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ನ ಅನುಗುಣವಾದ ಗ್ರೂವ್ 4 ಅನ್ನು ಪ್ರವೇಶಿಸುವವರೆಗೆ ಮತ್ತು ವಿಶ್ರಮಿಸುವಾಗ ಉಂಗುರಗಳಲ್ಲಿನ ಬಿಡುವು 11 ಗೆ ಪ್ರವೇಶಿಸುತ್ತದೆ. ಹಿನ್ಸರಿತದ ಅನುಗುಣವಾದ ಇಳಿಜಾರಿನ ಮೇಲ್ಮೈ ವಿರುದ್ಧ ಅದರ ಇಳಿಜಾರಾದ ಬದಿಯ ಮೇಲ್ಮೈ 11. ಇದು ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 3 ತುದಿಗಳ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸುವ ಪ್ರಕ್ರಿಯೆಯಾಗಿದೆ.
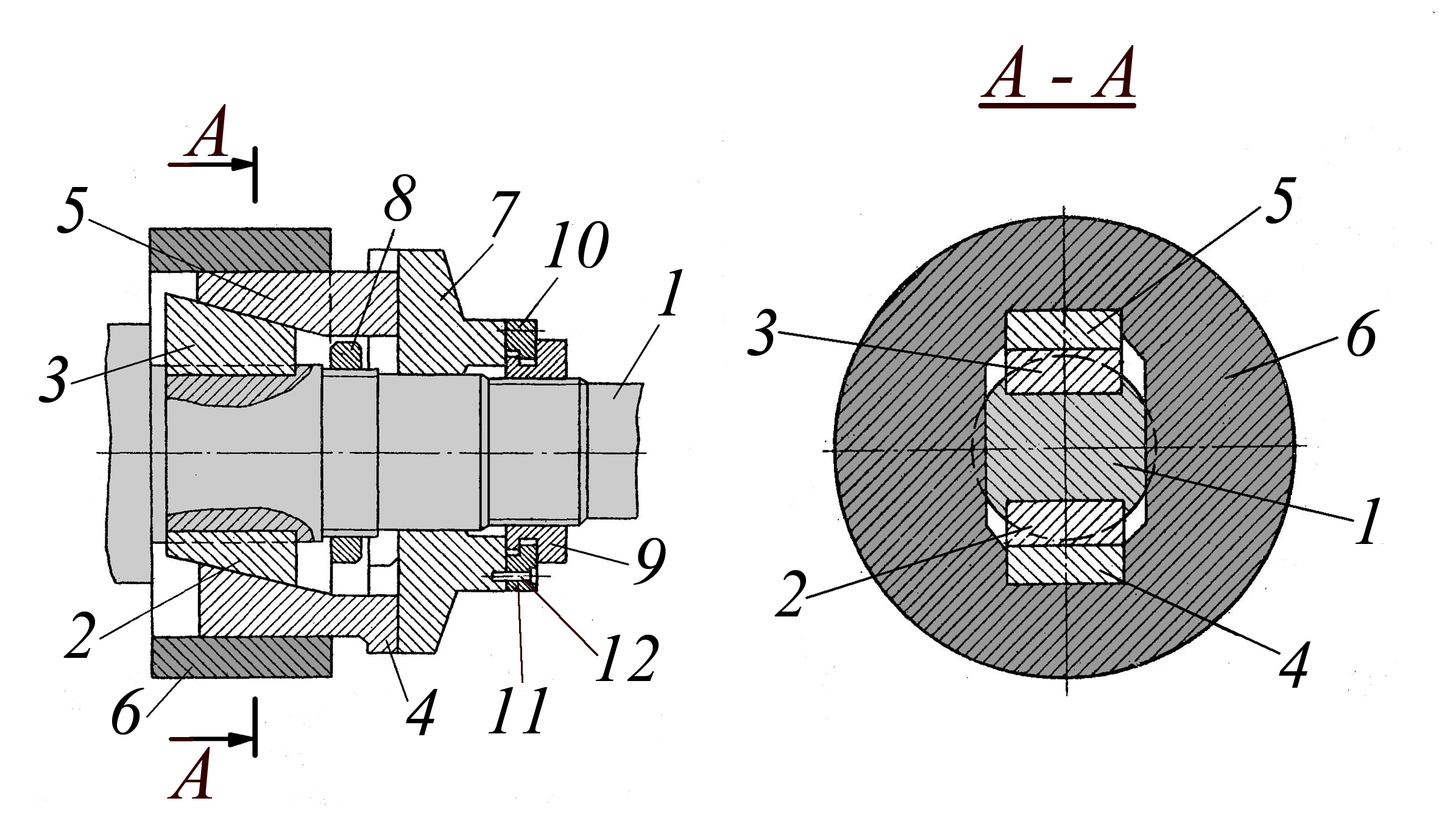
ಅಕ್ಕಿ. 26. ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ವಿಕೇಂದ್ರೀಯತೆಯ ಮೃದುವಾದ ಹೊಂದಾಣಿಕೆಗಾಗಿ ಬೆಣೆ ಸಾಧನದ ವಿನ್ಯಾಸ.
ಅಂಜೂರದಲ್ಲಿ. 26 ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ವಿಕೇಂದ್ರೀಯತೆಯನ್ನು ಸರಾಗವಾಗಿ ಸರಿಹೊಂದಿಸಲು ಬೆಣೆ ಸಾಧನದ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದು ಡ್ರೈವ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಅದರ ಮೇಲೆ ವೆಡ್ಜ್ಗಳು 2 ಮತ್ತು 3 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ, ಅವುಗಳ ಬೆಣೆ ಮೇಲ್ಮೈಗಳು ಬೆಣೆಯಾಕಾರದ 4 ಮತ್ತು 5 ರ ಸಂಯೋಗದ ಮೇಲ್ಮೈಗಳೊಂದಿಗೆ ಸಂಪರ್ಕದಲ್ಲಿರುತ್ತವೆ, ಇದು ವಿಲಕ್ಷಣ 6 ಮತ್ತು ರೇಖಾಂಶದ ಚಡಿಗಳಲ್ಲಿ ಅಕ್ಷೀಯ ಚಲನೆಯ ಸಾಧ್ಯತೆಯನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಫ್ಲೇಂಜ್ 7 ರ ಅನುಗುಣವಾದ ಚಡಿಗಳಲ್ಲಿ ರೇಡಿಯಲ್ ಚಲನೆ, ಎರಡನೆಯದನ್ನು ಶಾಫ್ಟ್ 1 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದ್ದು, ಶಾಫ್ಟ್ನ ಥ್ರೆಡ್ ಭಾಗದಲ್ಲಿರುವ ಕಾಯಿ 9 ಮೂಲಕ ಅಕ್ಷೀಯ ಚಲನೆಯ ಸಾಧ್ಯತೆಯಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವಿಲಕ್ಷಣ 6 ಅನ್ನು ಅಕ್ಷೀಯ ದಿಕ್ಕಿನಲ್ಲಿ ಶಾಫ್ಟ್ 1 ನಲ್ಲಿ ಅಡಿಕೆ 8 ಮೂಲಕ ನಿವಾರಿಸಲಾಗಿದೆ ಮತ್ತು ಅಡಿಕೆ 9 ಅನ್ನು ಅರ್ಧ ಉಂಗುರಗಳು 10, 11 ಮತ್ತು ಸ್ಕ್ರೂಗಳು 12 ಬಳಸಿ ಫ್ಲೇಂಜ್ 7 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.
ಸಾಧನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ 1 ರ ವಿಕೇಂದ್ರೀಯತೆಯನ್ನು ಬದಲಾಯಿಸಲು ಅಗತ್ಯವಿದ್ದರೆ, ಕಾಯಿ 9 ಅನ್ನು ತಿರುಗಿಸುವ ಮೂಲಕ, ಫ್ಲೇಂಜ್ 7 ಅನ್ನು ಅಪೇಕ್ಷಿತ ದಿಕ್ಕಿನಲ್ಲಿ ಸರಿಸಿ, ಆದರೆ 4 ಮತ್ತು 5 ತುಂಡುಭೂಮಿಗಳು 2 ಮತ್ತು 3 ಬೆಣೆಯಾಕಾರದ ಮೇಲ್ಮೈಗಳ ಉದ್ದಕ್ಕೂ ಜಾರುತ್ತವೆ. ಶಾಫ್ಟ್ 1, ಫ್ಲೇಂಜ್ 7 ನೊಂದಿಗೆ ಅಕ್ಷೀಯ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ ಮತ್ತು ಅದರಲ್ಲಿ ಮಾಡಿದ ತೋಡಿನ ಮೇಲ್ಮೈಯಲ್ಲಿ ರೇಡಿಯಲ್ ಆಗಿ ಜಾರುತ್ತದೆ. ಬೆಣೆಯಾಕಾರದ 4 ಮತ್ತು 5 ರ ಅಂತಹ ಚಲನೆಯ ಪರಿಣಾಮವಾಗಿ, ವಿಲಕ್ಷಣ 6 ರೇಡಿಯಲ್ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ, ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ವಿಕೇಂದ್ರೀಯತೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಅಥವಾ ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ಲಿವರ್ ಕಾರ್ಯವಿಧಾನದ ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಸ್ಲೈಡರ್ ಆಗಿದ್ದರೆ, ಅದರ ಆರಂಭಿಕ ಅಥವಾ ಅಂತಿಮ ಸ್ಥಾನವನ್ನು ಅದರೊಂದಿಗೆ ಸಂಪರ್ಕಿಸುವ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ನ ಉದ್ದವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನದ ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಲಿವರ್ ಅಥವಾ ರಾಕರ್ ಆರ್ಮ್ ಆಗಿದ್ದರೆ, ಅದರ ಕೋನೀಯ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ. ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ಸಾಧನಗಳ ವಿನ್ಯಾಸದ ಉದಾಹರಣೆಗಳನ್ನು ನೋಡೋಣ.

ಚಿತ್ರ 27 ಆರಂಭಿಕ ಹೊಂದಾಣಿಕೆಯೊಂದಿಗೆ ಲಿವರ್ ಯಾಂತ್ರಿಕತೆ
ಔಟ್ಪುಟ್ ಲಿಂಕ್ ಸ್ಥಾನ
ಚಿತ್ರ 27 ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದರಲ್ಲಿ ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನಿಂದ ಪಶರ್ಗೆ ಚಲನೆಯ ಪ್ರಸರಣವನ್ನು ಮಧ್ಯಂತರ ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ ಮೂಲಕ ನಡೆಸಲಾಗುತ್ತದೆ. ಇದು ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ಕ್ರ್ಯಾಂಕ್ ಪಿನ್ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಹೌಸಿಂಗ್ 2 ಮತ್ತು ರಾಡ್ 3 ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್, ಇದರ ಥ್ರೆಡ್ ತುದಿಗಳನ್ನು ಥ್ರೆಡ್ ಕಪ್ಲಿಂಗ್ 4 ಮೂಲಕ ಪರಸ್ಪರ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಅದರ ಸ್ಥಾನ ಲಾಕ್ನಟ್ಗಳು 5 ರಿಂದ ಸರಿಪಡಿಸಲಾಗಿದೆ, ಹಾಗೆಯೇ ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 7, ಅಕ್ಷ 8 ರ ಮೇಲೆ ಪ್ರಧಾನವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಅದರ ಚಾಲಿತ ತೋಳಿನ ಮೇಲೆ ರೋಲರ್ 10 ಅನ್ನು ಅಕ್ಷ 9 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಇದು ಪಶರ್ 11 ರೊಂದಿಗೆ ನಿರಂತರ ಸಂಪರ್ಕದಲ್ಲಿದೆ. ಈ ವಿನ್ಯಾಸ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಅದರ ಉದ್ದವನ್ನು ಸರಿಹೊಂದಿಸುವ ಮೂಲಕ, ದೇಹದ 2 ಮತ್ತು ರಾಡ್ 3 ಅನ್ನು ಜೋಡಿಸುವ 4 ರ ಥ್ರೆಡ್ ತುದಿಗಳನ್ನು ತಿರುಗಿಸುವ ಅಥವಾ ತಿರುಗಿಸುವ ಮೂಲಕ, ಲಿವರ್ 7 ಅನ್ನು ಬದಲಾಯಿಸಲು ಅನುಮತಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಪ್ರಕಾರ, ಪಶರ್ 11 ರ ಆರಂಭಿಕ ಸ್ಥಾನ, ಏನು ಉಪಕರಣದ ಭಾಗವಾಗಿ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಹೊಂದಿಸುವಾಗ ಅಗತ್ಯವಿದೆಯೇ?

ಚಿತ್ರ 28 ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ಉದ್ದವನ್ನು ಬದಲಾಯಿಸುವ ಸಾಧನದೊಂದಿಗೆ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆ
ಚಿತ್ರ 28 ಪತ್ರಿಕಾ ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್-ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಕಾರ್ಯವಿಧಾನದ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದರಲ್ಲಿ ಸ್ಲೈಡರ್ನ ಆರಂಭಿಕ ಸ್ಥಾನವನ್ನು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ಉದ್ದವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ. ಇದು ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ನ ಕ್ರ್ಯಾಂಕ್ ಜರ್ನಲ್ 3 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ ಮತ್ತು ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 2 ಮತ್ತು ಅದರ ರಂಧ್ರದಲ್ಲಿರುವ ಅಕ್ಷ 4 ಮೂಲಕ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ಸ್ಲೈಡರ್ 5 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಆದರೆ ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 3 ನ ಕಣ್ಣು 7 ರಲ್ಲಿದೆ. ಬಶಿಂಗ್ 9 ನೊಂದಿಗೆ ಆಕ್ಸಿಸ್ 8 ಅನ್ನು ಹಿಂಜ್ ಆಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಥ್ರೆಡ್ ಮಾಡಲಾದ ಚಲನೆಯಲ್ಲಿ ಹೊಂದಾಣಿಕೆ ಸ್ಕ್ರೂ 10 ಇದೆ. ಸ್ಕ್ರೂ 10 ರ ಬಾಲ್ ಸಪೋರ್ಟ್ 12 ಅನ್ನು ಥ್ರಸ್ಟ್ ಬೇರಿಂಗ್ 15 ನಲ್ಲಿ ಗಾಜಿನ 14 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಕವರ್ 17 ರಿಂದ ಸರಿಪಡಿಸಲಾಗಿದೆ , ಸ್ಕ್ರೂನ ಸ್ಕ್ವೇರ್ ಶ್ಯಾಂಕ್ 16 ಅನ್ನು ಕವರ್ 17 ರ ರಂಧ್ರದ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ. ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 1 ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ನ ಕ್ರ್ಯಾಂಕ್ಪಿನ್ 3 ನೊಂದಿಗೆ ಸ್ಲೈಡಿಂಗ್ ಬೇರಿಂಗ್ 18 ಮೂಲಕ ಸಂಪರ್ಕದಲ್ಲಿದೆ, ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 2 ಜೊತೆಗೆ ಸ್ಲೈಡಿಂಗ್ ಬೇರಿಂಗ್ 19, ಮತ್ತು ವಿಲಕ್ಷಣ ಬಶಿಂಗ್ 2 ಜೊತೆಗೆ ಅಕ್ಷ 4 ಜೊತೆಗೆ ಸ್ಲೈಡಿಂಗ್ ಬೇರಿಂಗ್ 20. ರಲ್ಲಿ ಅಕ್ಷೀಯ ದಿಕ್ಕು, ಅಕ್ಷ 4 ಅನ್ನು ವಾಷರ್ 21 ಮತ್ತು ಬೋಲ್ಟ್ 22 ನೊಂದಿಗೆ ನಿವಾರಿಸಲಾಗಿದೆ.
ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 1 ರ ಉದ್ದವನ್ನು ಬದಲಾಯಿಸಲು, ಸರಿಹೊಂದಿಸುವ ಸ್ಕ್ರೂ 10 ಅನ್ನು ಸ್ಕ್ವೇರ್ ಹೆಡ್ 16 ರಿಂದ ಅಪೇಕ್ಷಿತ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಿಸಲಾಗುತ್ತದೆ, ಇದು ಥ್ರೆಡ್ ಸ್ಲೀವ್ 9 ರಿಂದ ತಿರುಗಿಸಿದಾಗ ಅಥವಾ ತಿರುಗಿಸಿದಾಗ ವಿಲಕ್ಷಣ ತೋಳು 2 ಅನ್ನು ಅಕ್ಷ 4 ರ ಸುತ್ತಲೂ ತಿರುಗಿಸಲು ಒತ್ತಾಯಿಸುತ್ತದೆ. , ಮತ್ತು ಆ ಮೂಲಕ ಅದರ ಅಕ್ಷದ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ, ಉದ್ದವಾಗಿಸುವುದು ಅಥವಾ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 1 ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ, ಇದು ಸ್ಲೈಡರ್ 5 ರ ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿ ಬದಲಾವಣೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ
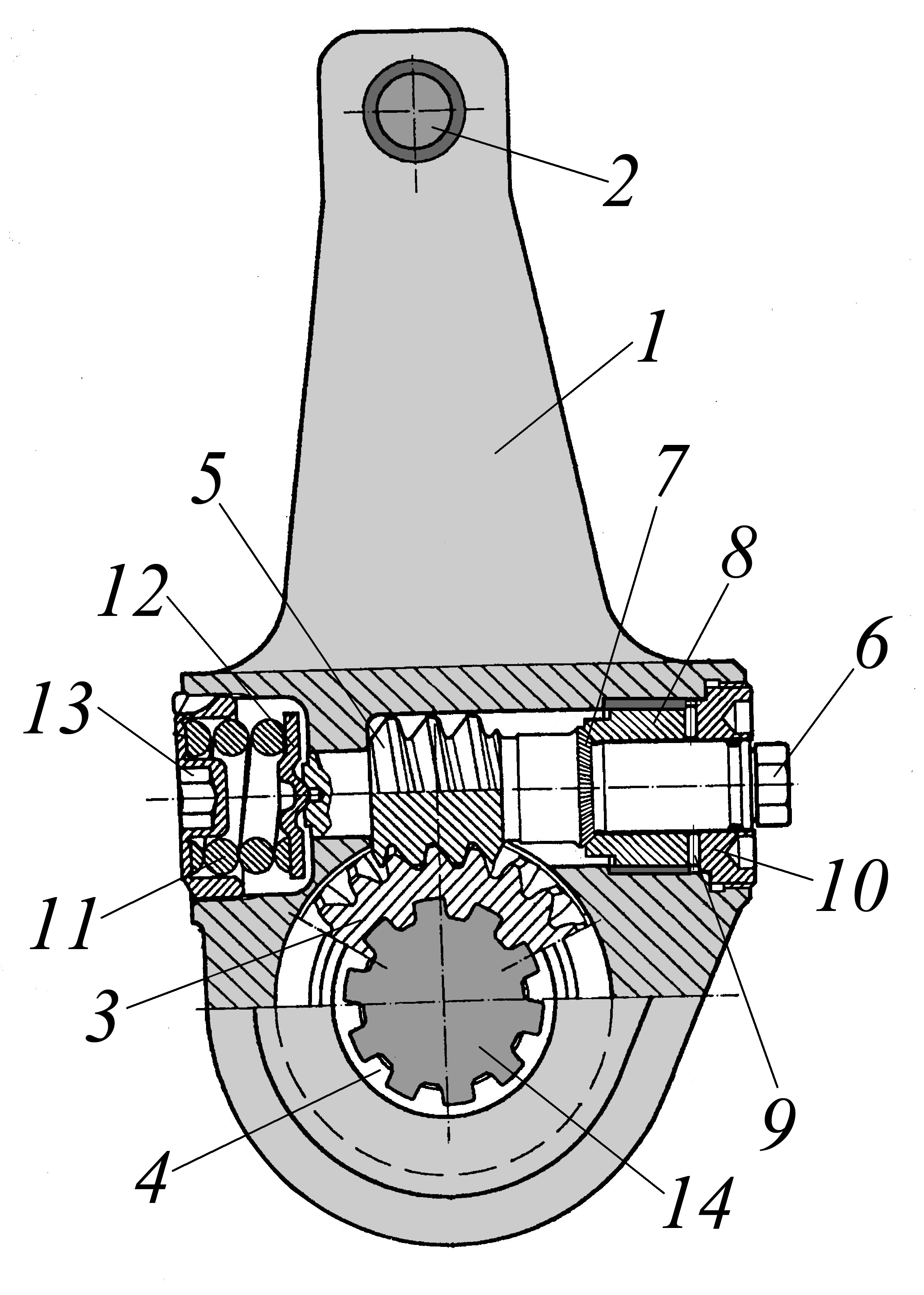
ಚಿತ್ರ 29 ಅದರ ಕೋನೀಯ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ಅಂತರ್ನಿರ್ಮಿತ ಸಾಧನದೊಂದಿಗೆ ರಾಕರ್
ಚಿತ್ರ 29 ರಾಕರ್ ಆರ್ಮ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸಾಧನದ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದು ಸ್ಥಾಪಿಸಲಾದ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಅದರ ಕೋನೀಯ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಈ ಸಾಧನವನ್ನು ರಾಕರ್ ಆರ್ಮ್ 1 ರಲ್ಲಿ ನಿರ್ಮಿಸಲಾಗಿದೆ, ಇದು ಅಕ್ಷ 2 ರ ಮೂಲಕ ಲಿವರ್ ಮೆಕ್ಯಾನಿಸಂನ ಡ್ರೈವ್ ರಾಡ್ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಇದು ರಾಕರ್ ಆರ್ಮ್ನ ಬೋರ್ನಲ್ಲಿರುವ ವರ್ಮ್ ವೀಲ್ 3 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಮತ್ತು ಅದರ ಆಂತರಿಕ ಸ್ಪ್ಲೈನ್ಗಳೊಂದಿಗೆ 4 ಸ್ಪ್ಲೈನ್ಡ್ ಅನ್ನು ಸಂಪರ್ಕಿಸುತ್ತದೆ. ಅಕ್ಷದ ಮೇಲ್ಮೈ 14, ಮತ್ತು ವರ್ಮ್ ಚಕ್ರದ ಅಕ್ಷಕ್ಕೆ ಲಂಬವಾಗಿ ಮಾಡಿದ ರಾಕರ್ ತೋಳಿನ ಬೋರಿಂಗ್ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ವರ್ಮ್ 5 ನೊಂದಿಗೆ ತೊಡಗಿಸಿಕೊಳ್ಳುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವರ್ಮ್ 5 ರ ಎಡ ಜರ್ನಲ್ ಷಡ್ಭುಜೀಯ ತುದಿ 6 ಅನ್ನು ಕವರ್ 10 ರ ರಂಧ್ರದಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ, ರೋಲರುಗಳು 9 ರ ಗುಂಪಿನ ಮೂಲಕ, ತೋಳು 8 ನೊಂದಿಗೆ ಸಂಪರ್ಕದಲ್ಲಿದೆ, ಅದರ ಬಲ ತುದಿಯಲ್ಲಿ ಶಂಕುವಿನಾಕಾರದ ಹಲ್ಲುಗಳಿವೆ. 7, ಇದು ವರ್ಮ್ 5 ನಲ್ಲಿ ಮಾಡಿದ ಸಂಯೋಗದ ಹಲ್ಲುಗಳೊಂದಿಗೆ ಸಂಪರ್ಕಗೊಳ್ಳುತ್ತದೆ, ಇದು ನಿಶ್ಚಿತಾರ್ಥವನ್ನು ರೂಪಿಸುತ್ತದೆ. ವರ್ಮ್ 5 ರ ಎಡ ತುದಿಯು ಅದರ ಕೇಂದ್ರ ಶಂಕುವಿನಾಕಾರದ ರಂಧ್ರದೊಂದಿಗೆ ಎಲಾಸ್ಟಿಕ್ ವಾಷರ್ 12 ರ ಸಂಯೋಗದ ಮೇಲ್ಮೈಯೊಂದಿಗೆ ಸಂಪರ್ಕದಲ್ಲಿದೆ, ಇದನ್ನು ವಸಂತ 11 ಮತ್ತು ಕವರ್ 13 ರಿಂದ ಒತ್ತಲಾಗುತ್ತದೆ.
ಅಕ್ಷ 14 ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ರಾಕರ್ 1 ರ ಕೋನೀಯ ಸ್ಥಾನದ ಹೊಂದಾಣಿಕೆಯನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ. ರಾಕರ್ 1 ಅನ್ನು ಒಂದು ದಿಕ್ಕಿನಲ್ಲಿ ಅಥವಾ ಇನ್ನೊಂದಕ್ಕೆ ತಿರುಗಿಸಲು, ವರ್ಮ್ 5 ಅನ್ನು ಷಡ್ಭುಜೀಯ ಹೆಡ್ 6 ಮೂಲಕ ಅಪೇಕ್ಷಿತ ದಿಕ್ಕಿನಲ್ಲಿ ವ್ರೆಂಚ್ ಮೂಲಕ ತಿರುಗಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ಅದರ ತಿರುಗುವಿಕೆಯು ವರ್ಮ್ ವೀಲ್ 3 ಗೆ ಹರಡುತ್ತದೆ, ಇದನ್ನು ಸ್ಪ್ಲೈನ್ಡ್ ಸಂಪರ್ಕದ ಮೂಲಕ ಸರಿಪಡಿಸಲಾಗುತ್ತದೆ. ಶಾಫ್ಟ್ 14 ನಲ್ಲಿ, ಚಲನರಹಿತವಾಗಿರುತ್ತದೆ, ಮತ್ತು ರಾಕರ್ 1 ಅಪೇಕ್ಷಿತ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಶಾಫ್ಟ್ 14 ಗೆ ಹೋಲಿಸಿದರೆ ಅದರ ಕೋನೀಯ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ.
ಕ್ರ್ಯಾಂಕ್ ಮತ್ತು ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಮೆಕ್ಯಾನಿಸಂಗಳ ಸ್ಲೈಡರ್ಗಳು, ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ಆಕ್ಟಿವೇಟರ್ಗಳು, ನಿರ್ದಿಷ್ಟವಾಗಿ ಯಾಂತ್ರಿಕ ಪ್ರೆಸ್ಗಳು, ಉಪಕರಣದ ಮೂಲ ಭಾಗಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಅವುಗಳ ಸ್ಥಾನ ಮತ್ತು ಚಲನೆಗೆ ಕಟ್ಟುನಿಟ್ಟಾದ ಅವಶ್ಯಕತೆಗಳಿಗೆ ಒಳಪಟ್ಟಿರುತ್ತವೆ (ಯಾಂತ್ರಿಕ ಪ್ರೆಸ್ಗೆ ಇದು ಅವಶ್ಯಕತೆಯಾಗಿದೆ ಟೇಬಲ್ನ ಮೂಲ ಮೇಲ್ಮೈಗೆ ಸ್ಲೈಡರ್ ಸ್ಟ್ರೋಕ್ನ ಲಂಬತೆಗಾಗಿ), ಆದ್ದರಿಂದ ಸ್ಲೈಡರ್ ಮಾರ್ಗದರ್ಶಿಗಳು ತಮ್ಮ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ಸೂಕ್ತವಾದ ಸಾಧನಗಳನ್ನು ಹೊಂದಿವೆ.

ಚಿತ್ರ 30 ಸ್ಲೈಡರ್ನ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಸಾಧನದ ವಿನ್ಯಾಸ
ಎರಡು ವಿಮಾನಗಳಲ್ಲಿ.
ಎರಡು ವಿಮಾನಗಳಲ್ಲಿ ಸ್ಲೈಡರ್ನ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಸಾಧನದ ವಿನ್ಯಾಸವನ್ನು ಚಿತ್ರ 30 ತೋರಿಸುತ್ತದೆ. ಈ ಸಾಧನವು ಸ್ಲೈಡ್ 10 ರ ಮಾರ್ಗದರ್ಶಿ 4 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಎರಡು ವಿಮಾನಗಳಲ್ಲಿ ಹೊಂದಾಣಿಕೆಯ ಸಾಧ್ಯತೆಯೊಂದಿಗೆ ಫ್ರೇಮ್ 1 ನಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಜೊತೆಗೆ ಥ್ರೆಡ್ ಬಶಿಂಗ್ 3 ಅನ್ನು ಮಾರ್ಗದರ್ಶಿ 4 ರ ಥ್ರೆಡ್ ರಂಧ್ರದಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಫ್ರೇಮ್ 1 ನೊಂದಿಗೆ ಸಂಪರ್ಕದಲ್ಲಿ ಗೋಳಾಕಾರದ ವಾಷರ್ 7 ಮತ್ತು ಪಿನ್ 14, ಹಾಗೆಯೇ ಆಕಾರದ ವಾಷರ್ 9, ಷಡ್ಭುಜಾಕೃತಿಯ ತಲೆ ಮತ್ತು ಆಯತಾಕಾರದ ಮುಂಚಾಚಿರುವಿಕೆಗಳನ್ನು ಹೊಂದಿರುವ ಥ್ರೆಡ್ ಬಶಿಂಗ್ 3 ಮತ್ತು ನಟ್ 12 ರಲ್ಲಿ ಸಂಯೋಗದ ಚಡಿಗಳೊಂದಿಗೆ ಸಂಪರ್ಕದಲ್ಲಿ ಮಾರ್ಗದರ್ಶಿಗಳಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ರಲ್ಲಿ ಮಾರ್ಗದರ್ಶಿಗಳ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು ಮುಂಭಾಗದ ಸಮತಲ, ಸ್ಕ್ರೂ 8 ಅನ್ನು ಸಡಿಲಗೊಳಿಸಿ ಮತ್ತು ಆಕಾರದ ವಾಷರ್ 9 ಅನ್ನು ತಿರುಗಿಸುವ ಮೂಲಕ, ಅಕ್ಷದ 2 ರ ಥ್ರೆಡ್ ರಂಧ್ರದಲ್ಲಿ ಬಶಿಂಗ್ 3 ಅನ್ನು ಸರಿಸಿ, ಇದು ಮಾರ್ಗದರ್ಶಿ 4 ರ ಬದಲಾವಣೆಯ ಸ್ಥಾನಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಅಗತ್ಯ ಪ್ರಮಾಣದ ಹೊಂದಾಣಿಕೆಯನ್ನು ಪೂರ್ಣಗೊಳಿಸಿದ ನಂತರ, ಸ್ಕ್ರೂ 8 ಅನ್ನು ಬಿಗಿಗೊಳಿಸಲಾಗಿದೆ. ಮುಂಭಾಗಕ್ಕೆ ಲಂಬವಾಗಿರುವ ಸಮತಲದಲ್ಲಿ ಮಾರ್ಗದರ್ಶಿಗಳ ಸ್ಥಾನವನ್ನು ಸರಿಹೊಂದಿಸಲು, ಅಡಿಕೆ 12 ರ ಬಿಗಿಗೊಳಿಸುವಿಕೆಯನ್ನು ಸಡಿಲಗೊಳಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಅದೇ ರೀತಿಯಲ್ಲಿ, ಆಕಾರದ ಅಡಿಕೆ 9 ಅನ್ನು ತಿರುಗಿಸುವ ಮೂಲಕ, ಮಾರ್ಗದರ್ಶಿ 4 ಅನ್ನು ಅಗತ್ಯವಿರುವ ಮೊತ್ತಕ್ಕೆ ಸರಿಸಲಾಗುತ್ತದೆ, ಅದರ ನಂತರ ಅಡಿಕೆ 12 ಅನ್ನು ಬಿಗಿಗೊಳಿಸಲಾಗುತ್ತದೆ.
ತಾಂತ್ರಿಕ ಸಲಕರಣೆಗಳ ಭಾಗವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಕ್ರ್ಯಾಂಕ್ ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ, ವಿಲಕ್ಷಣ ಶಾಫ್ಟ್ನ ಕ್ರ್ಯಾಂಕ್ ಜರ್ನಲ್ ಅನ್ನು ಮೇಲಿನ ಮತ್ತು ಕೆಳಗಿನ ಬಿಂದುಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ± 15 ಡಿಗ್ರಿಗಳಷ್ಟು ಪ್ರದೇಶದಲ್ಲಿ ತಿರುಗಿಸಿದಾಗ ಗರಿಷ್ಠ ಬಲವು ಸಂಭವಿಸುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಟಾರ್ಕ್ ಇರುವುದಿಲ್ಲ. ಗರಿಷ್ಠ ಮತ್ತು ಆದ್ದರಿಂದ ಸುರಕ್ಷತಾ ಸಾಧನಗಳ ತಿಳಿದಿರುವ ವಿನ್ಯಾಸಗಳು ( ಯಾಂತ್ರಿಕ ಡ್ರೈವ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸುರಕ್ಷತಾ ಹಿಡಿತಗಳು) ಸಂಭವನೀಯ ಓವರ್ಲೋಡ್ಗಳಿಂದ ಅದನ್ನು ರಕ್ಷಿಸುವುದಿಲ್ಲ. ಇದಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ, ಸುರಕ್ಷತಾ ಸಾಧನಗಳನ್ನು ನೇರವಾಗಿ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ಲಿಂಕ್ಗಳಲ್ಲಿ ನಿರ್ಮಿಸಲಾಗಿದೆ.
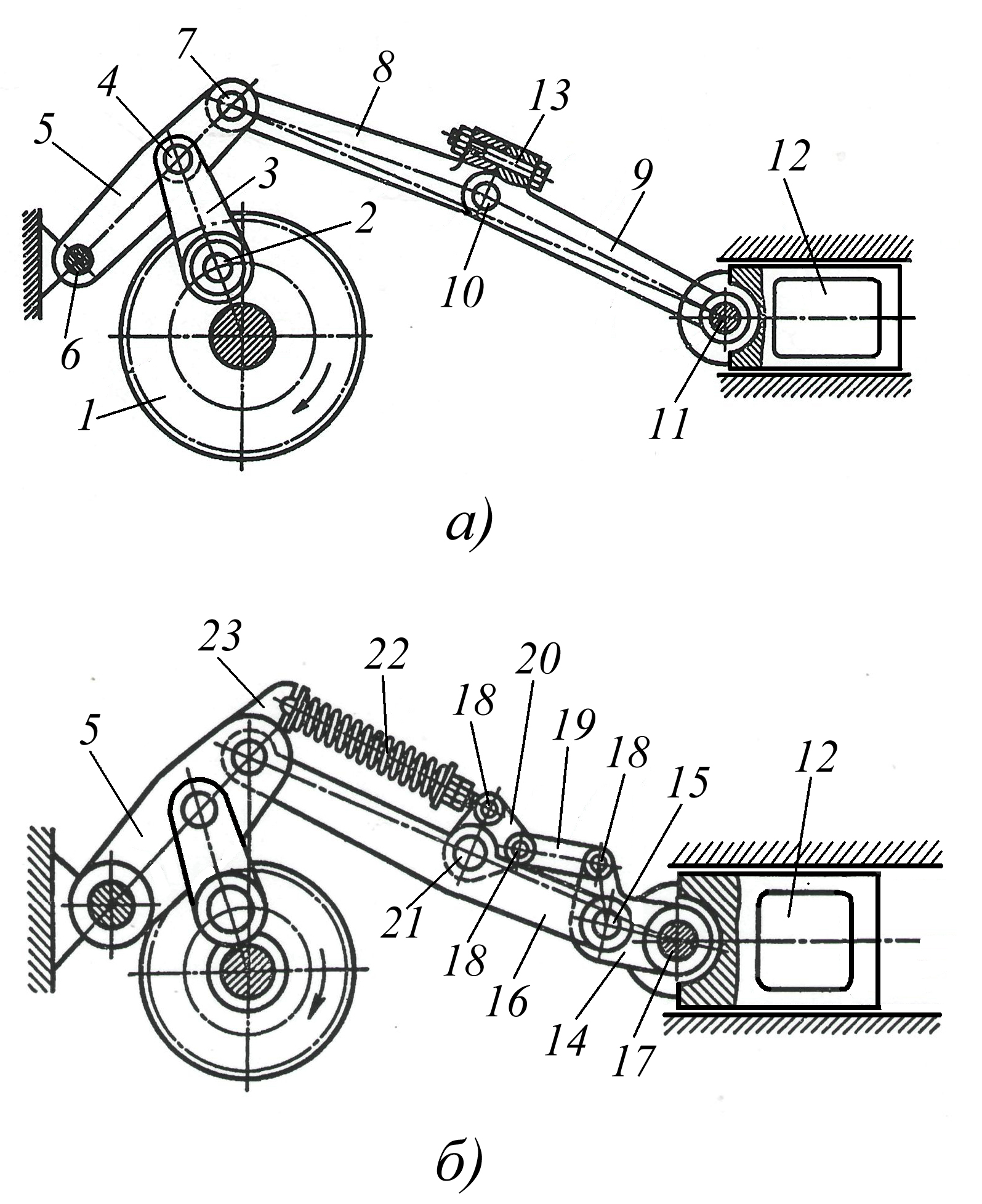
ಚಿತ್ರ 31 ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸುರಕ್ಷತಾ ಸಾಧನಗಳಿಗೆ ವಿನ್ಯಾಸ ಆಯ್ಕೆಗಳು.
ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸುರಕ್ಷತಾ ಸಾಧನಗಳಿಗೆ ಎರಡು ವಿನ್ಯಾಸ ಆಯ್ಕೆಗಳನ್ನು ಚಿತ್ರ 31 ತೋರಿಸುತ್ತದೆ. ಯಾಂತ್ರಿಕತೆಯ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ ಅನ್ನು ಗೇರ್ 1 ನೊಂದಿಗೆ ಒಂದು ತುಣುಕಿನಲ್ಲಿ ತಯಾರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ಕ್ರ್ಯಾಂಕ್ ಪಿನ್ 2 ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 3 ಗೆ ಪ್ರಧಾನವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ಪ್ರತಿಯಾಗಿ, ಅಕ್ಷ 4 ಮೂಲಕ, ಫ್ರೇಮ್ನಲ್ಲಿ ಅಳವಡಿಸಲಾದ ರಾಕರ್ ಆರ್ಮ್ 5 ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಅಕ್ಷ 6, ಮತ್ತು ಅಕ್ಷ 7 ರ ಮೂಲಕ ಜೋಡಣೆಗೆ ಜೋಡಿಸುವ ರಾಡ್ ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ ಡ್ರೈವಿಂಗ್ ಭಾಗ 8 ಮತ್ತು ಚಾಲಿತ ಭಾಗ 9, ಸುರಕ್ಷತಾ ಬೋಲ್ಟ್ 13 ನೊಂದಿಗೆ ಅಕ್ಷ 10 ಮೂಲಕ ಪರಸ್ಪರ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ (ಚಿತ್ರ 31a ನೋಡಿ), ಸಂಪರ್ಕಿಸುವಾಗ ರಾಡ್ ಅನ್ನು ಅಕ್ಷ 11 ಮೂಲಕ ಸ್ಲೈಡರ್ 12 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಲೋಡ್ ಹೆಚ್ಚಾದಂತೆ, ಸ್ಲೈಡರ್ 12 ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸುರಕ್ಷತಾ ಬೋಲ್ಟ್ ಅನುಮತಿಸುವ 13 ಬ್ರೇಕ್ಗಳನ್ನು ಮೀರುತ್ತದೆ, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 8 ಮತ್ತು 9 ರ ಭಾಗಗಳು ಅಕ್ಷ 10 ಮತ್ತು ಚಲನೆಯಲ್ಲಿ ಪರಸ್ಪರ ಸಂಬಂಧಿಸಿ ತಿರುಗುತ್ತವೆ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ನಿಂದ ಸ್ಲೈಡರ್ 12 ಗೆ ಹರಡುವುದಿಲ್ಲ, ಇದು ಯಾಂತ್ರಿಕತೆಯ ಸಂಕೀರ್ಣ ಭಾಗಗಳನ್ನು ಒಡೆಯುವುದನ್ನು ತಡೆಯುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಸ್ಲೈಡರ್ 12 ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ಹೆಚ್ಚಳದ ಕಾರಣಗಳನ್ನು ತೆಗೆದುಹಾಕಿದ ನಂತರ ಮತ್ತು ಸುರಕ್ಷತಾ ಬೋಲ್ಟ್ 13 ಅನ್ನು ಬದಲಿಸಿದ ನಂತರ, ಯಾಂತ್ರಿಕತೆಯು ಕಾರ್ಯನಿರ್ವಹಿಸುವುದನ್ನು ಮುಂದುವರಿಸಬಹುದು.
ಚಿತ್ರ 31b ಅಂತರ್ನಿರ್ಮಿತ ಸ್ವಯಂ-ಮರುಹೊಂದಿಸುವ ಸುರಕ್ಷತಾ ಕಾರ್ಯವಿಧಾನದೊಂದಿಗೆ ಯಾಂತ್ರಿಕತೆಯ ಆವೃತ್ತಿಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದು ಅಕ್ಷಗಳು 15, 17 ಮತ್ತು ಮಧ್ಯಂತರ ಡಬಲ್ ಆರ್ಮ್ಡ್ ಲಿವರ್ 14 ಜೊತೆಗೆ ಸ್ಲೈಡರ್ 12 ಮತ್ತು ಲಿವರ್ 14 ಅನ್ನು ಅಕ್ಷಗಳು 18, ರಾಡ್ 19 ಮತ್ತು ಡಬಲ್ ಆರ್ಮ್ಡ್ ಲಿವರ್ 20 ಮೂಲಕ ಸಂಪರ್ಕಿಸುವ ಒಂದು ತುಂಡು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 16 ಅನ್ನು ಒಳಗೊಂಡಿದೆ. , ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 16 ರಂದು ಅಕ್ಷ 21 ರ ಮೂಲಕ ಹಿಂಗ್ಡ್ ಆಗಿ ಜೋಡಿಸಲಾಗಿದೆ, ಕಂಪ್ರೆಷನ್ ಸ್ಪ್ರಿಂಗ್ 22 ಮೂಲಕ ರಾಕರ್ ಆರ್ಮ್ನ ಮುಂಚಾಚಿರುವಿಕೆ 23 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ 5. ಲೋಡ್ ಹೆಚ್ಚಾದಂತೆ, ಸ್ಲೈಡರ್ 12 ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸ್ಪ್ರಿಂಗ್ 22 ಅನುಮತಿಸುವ ಮಿತಿಯನ್ನು ಮೀರುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 16 ಮತ್ತು ಅಕ್ಷ 15 ನಲ್ಲಿ ಡಬಲ್-ಆರ್ಮ್ ಲಿವರ್ 14 ಪರಸ್ಪರ ಸಂಬಂಧಿಸಿ ತಿರುಗುತ್ತದೆ, ಹೀಗಾಗಿ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ನಿಂದ ಸ್ಲೈಡರ್ಗೆ ಚಲನೆಯ ವರ್ಗಾವಣೆಯನ್ನು ತೆಗೆದುಹಾಕುತ್ತದೆ. ಸ್ಲೈಡರ್ 12 ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ಹೆಚ್ಚಳದ ಕಾರಣಗಳನ್ನು ತೆಗೆದುಹಾಕಿದ ನಂತರ, ವಸಂತ 22 ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಮರಳುತ್ತದೆ, ಸುರಕ್ಷತಾ ಸಾಧನದ ಎಲ್ಲಾ ಭಾಗಗಳನ್ನು (ಲಿವರ್ 14, ರಾಡ್ 19 ಮತ್ತು ಲಿವರ್ 20) ಹಿಂದಿರುಗಿಸುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಮುಂದುವರಿಸಬಹುದು.

ಅಕ್ಕಿ. 32. ವಿಭಿನ್ನ ಎತ್ತರದಲ್ಲಿರುವ ಕನ್ವೇಯರ್ಗಳ ನಡುವೆ ಉತ್ಪನ್ನವನ್ನು ವರ್ಗಾಯಿಸಲು ಟಿಲ್ಟರ್ ಆಕ್ಟಿವೇಟರ್ನ ವಿನ್ಯಾಸ.
ಅಂಜೂರದಲ್ಲಿ. 32 ಎತ್ತರದಲ್ಲಿ ವಿವಿಧ ಹಂತಗಳಲ್ಲಿ ನೆಲೆಗೊಂಡಿರುವ ಕನ್ವೇಯರ್ಗಳ ನಡುವೆ ಉತ್ಪನ್ನವನ್ನು ವರ್ಗಾಯಿಸಲು ಟಿಲ್ಟರ್ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ರಚನೆಯ ವಿನ್ಯಾಸದ ಪ್ರಕಾರ ತಯಾರಿಸಲಾಗುತ್ತದೆ, ಇದರಲ್ಲಿ ಡ್ರೈವ್ ಅಲ್ಲದ ಸಿಲಿಂಡರಾಕಾರದ ಮತ್ತು ಬೆವೆಲ್ ಗೇರ್ಗಳನ್ನು ನಿರ್ಮಿಸಲಾಗಿದೆ, ಇದು ಭಾಗವನ್ನು ಅನುಮತಿಸುತ್ತದೆ ಚಲಿಸುವಾಗ ಅದರ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸಿ. ಇದು ವಿವಿಧ ಎತ್ತರಗಳಲ್ಲಿ ನೆಲೆಗೊಂಡಿರುವ ಕನ್ವೇಯರ್ 2 ಮತ್ತು 3 ರ ನಡುವೆ ಸ್ಥಾಪಿಸಲಾದ ರಾಕ್ 1 ನಲ್ಲಿ ಅಳವಡಿಸಲಾಗಿದೆ.ಟಿಲ್ಟರ್ ವರ್ಗಾವಣೆ ಕಾರ್ಯವಿಧಾನವನ್ನು ನಾಲ್ಕು-ಲಿಂಕ್ ಹಿಂಜ್ ರೂಪದಲ್ಲಿ ಮಾಡಲಾಗಿದೆ, ತಿರುಗುವಿಕೆಯ ಡ್ರೈವ್ನೊಂದಿಗೆ ಉತ್ಪನ್ನದ ಹಿಡಿತದ ಕಾರ್ಯವಿಧಾನವನ್ನು ಅಳವಡಿಸಲಾಗಿದೆ. ವರ್ಗಾವಣೆ ಕಾರ್ಯವಿಧಾನವು ರ್ಯಾಕ್ 1 ರ ಬೋರ್ಗಳಲ್ಲಿ ಬೇರಿಂಗ್ಗಳ ಮೇಲೆ ಜೋಡಿಸಲಾದ ಅಕ್ಷ 4 ಮತ್ತು ಶಾಫ್ಟ್ 5 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಅವುಗಳಿಗೆ ಲಿವರ್ಸ್ 6 ಮತ್ತು 7 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಶಾಫ್ಟ್ 5 ರ ವಿರುದ್ಧ ತುದಿಯಲ್ಲಿ ಕೌಂಟರ್ ವೇಟ್ 8 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ, ಗೇರ್ 9 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ. ಶಾಫ್ಟ್ 5 ಮತ್ತು ರ್ಯಾಕ್ 10 ನೊಂದಿಗೆ ಮೆಶ್ಡ್, ಹೈಡ್ರಾಲಿಕ್ ಸಿಲಿಂಡರ್ ರಾಡ್ 11 ನೊಂದಿಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಸಂಪರ್ಕಪಡಿಸಲಾಗಿದೆ, 1 ರ್ಯಾಕ್ ಮೇಲೆ ಜೋಡಿಸಲಾಗಿದೆ. ಲಿವರ್ಸ್ 6 ಮತ್ತು 7 ರ ವಿರುದ್ಧ ತುದಿಗಳನ್ನು ಗೇರ್ ಶಾಫ್ಟ್ 14 ಮತ್ತು ಅಕ್ಷದ ಮೂಲಕ ಹೌಸಿಂಗ್ 13 ರಲ್ಲಿ ಪ್ರಮುಖವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ 15, ಗೇರ್ ಶಾಫ್ಟ್ 14 ಗೇರ್ 22 ಅನ್ನು ಗ್ರಿಪ್ಪಿಂಗ್ ಮೆಕ್ಯಾನಿಸಂ ಉತ್ಪನ್ನದ ಸರದಿ ಡ್ರೈವ್ನ ಶಾಫ್ಟ್ 16 ನಲ್ಲಿ ಮುಕ್ತವಾಗಿ ಅಳವಡಿಸಲಾಗಿದೆ ಮತ್ತು ಡ್ರೈವರ್ 21 ಮತ್ತು ಫ್ಲೇಂಜ್ 20 ಮೂಲಕ ಅದರೊಂದಿಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಉತ್ಪನ್ನ ಗ್ರಿಪ್ಪರ್ ಅನ್ನು ರೂಪದಲ್ಲಿ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಪಿನ್ 29 ರ, ಶಾಫ್ಟ್ 17 ನಲ್ಲಿ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಶಾಫ್ಟ್ 17 ರ ತಿರುಗುವಿಕೆಯನ್ನು ಮಿತಿಗೊಳಿಸುವ ಎರಡು ನಿಲ್ದಾಣಗಳು 30 ಮತ್ತು 31 ಅನ್ನು ಒಳಗೊಂಡಿದೆ. ಉತ್ಪನ್ನದ ಗ್ರಿಪ್ಪರ್ನ ತಿರುಗುವಿಕೆಯ ಡ್ರೈವ್ ಶಾಫ್ಟ್ಗಳು 16 ಮತ್ತು 17 ಮತ್ತು ಮೆಶ್ಡ್ ಬೆವೆಲ್ ಗೇರ್ಗಳು 18 ಮತ್ತು 19 ಮತ್ತು a ಬ್ಲಾಕ್ 24 ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಸ್ಪ್ರಿಂಗ್ ಸಾಧನ, ಚಲಿಸಬಲ್ಲ ನಿಲ್ದಾಣಗಳು 25 ಮತ್ತು 26 ಮತ್ತು ಸ್ಪ್ರಿಂಗ್ಗಳು 27 ಮತ್ತು 28, ಇವು ಗೇರ್ 22 ರ ವಾರ್ಷಿಕ ತೋಡು 23 ರಲ್ಲಿವೆ.
ಸಾಧನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿ, ಸಿಲಿಂಡರಾಕಾರದ ಗಾಜಿನ ಆಕಾರವನ್ನು ಹೊಂದಿರುವ ಉತ್ಪನ್ನವು ಮೇಲಿನ ಕನ್ವೇಯರ್ 2 ರ ರೋಲರುಗಳು 32 ರ ಮೇಲೆ ಇದೆ ಮತ್ತು ಬೆರಳು 29 ಅನ್ನು ಅದರ ರಂಧ್ರಕ್ಕೆ ಸೇರಿಸಲಾಗುತ್ತದೆ. ಉತ್ಪನ್ನವನ್ನು ಕೆಳಗಿನ ಕನ್ವೇಯರ್ 3 ಗೆ ವರ್ಗಾಯಿಸಲು, ಹೈಡ್ರಾಲಿಕ್ ಸಿಲಿಂಡರ್ 11 ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ ಮತ್ತು ಅದರ ರಾಡ್ ಅನ್ನು ರ್ಯಾಕ್ 10 ಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಆದರೆ ಗೇರ್ 9 ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಶಾಫ್ಟ್ 5 ಅನ್ನು ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಿಸುತ್ತದೆ, ಅದು ಲಿವರ್ 7 ಅನ್ನು ತಿರುಗಿಸುತ್ತದೆ. , ಹೌಸಿಂಗ್ 13 ಮತ್ತು ಬೆರಳಿನ 29 ರ ಮೇಲೆ ಇರುವ ಉತ್ಪನ್ನದೊಂದಿಗೆ ವರ್ಗಾವಣೆಯ ಕಾರ್ಯವಿಧಾನದ ಪರಿಣಾಮವಾಗಿ, ಸಮತಟ್ಟಾದ - ಸಮಾನಾಂತರ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ, ಆದ್ದರಿಂದ ಉತ್ಪನ್ನವು ಕನ್ವೇಯರ್ 3 ಅನ್ನು ಸಮತಲ ಸ್ಥಾನದಲ್ಲಿ ಪ್ರವೇಶಿಸುತ್ತದೆ. ಸನ್ನೆಕೋಲಿನ 6 ಮತ್ತು 7 ರ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ, ಉತ್ಪನ್ನವು 180 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ಲಂಬ ಅಕ್ಷದ ಸುತ್ತಲೂ ತಿರುಗುತ್ತದೆ, ಇದು 6 ಮತ್ತು 7 ನೇ ಸನ್ನೆಕೋಲಿನ ಸ್ವಿಂಗ್, ಗೇರ್ ಶಾಫ್ಟ್ 14 ರ ತಿರುಗುವಿಕೆಯಿಂದಾಗಿ ಗೇರ್ಗೆ ಹರಡುತ್ತದೆ. 22 ಮತ್ತು ನಂತರ ಬೆವೆಲ್ ಗೇರ್ 18 ಮತ್ತು 19 ಮೂಲಕ ಶಾಫ್ಟ್ 17 ಗೆ, ಅದರ ಮೇಲೆ ಪಿನ್ 29 ಅನ್ನು ನಿಗದಿಪಡಿಸಲಾಗಿದೆ. ಉತ್ಪನ್ನದ ಸಲುವಾಗಿ, ಚಲನೆಯ ಆರಂಭದಲ್ಲಿ ಲಂಬ ಅಕ್ಷದ ಸುತ್ತಲೂ ತಿರುಗುವಾಗ, ಮೇಲಿನ ಕನ್ವೇಯರ್ನ ರೋಲರ್ಗಳು 32 ಅನ್ನು ಸ್ಪರ್ಶಿಸಬಾರದು 2 ಮತ್ತು ಅವುಗಳ ನಡುವೆ ಖಾತರಿಯ ಅಂತರವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಗೇರ್ ಶಾಫ್ಟ್ 14 ಅನ್ನು ತಿರುಗಿಸುವಾಗ, ಸ್ಪ್ರಿಂಗ್ 27 ರ ಆರಂಭಿಕ ಸಂಕೋಚನದ ಸಮಯದಲ್ಲಿ ಶಾಫ್ಟ್ 16 22 ನಲ್ಲಿ ಅಳವಡಿಸಲಾದ ಗೇರ್ ಚಕ್ರವು ಪಿನ್ 29 ಲಗತ್ತಿಸಲಾದ ಶಾಫ್ಟ್ 17 ಗೆ ತಿರುಗುವಿಕೆಯನ್ನು ರವಾನಿಸದೆ ಮುಕ್ತವಾಗಿ ತಿರುಗುತ್ತದೆ. ಉತ್ಪನ್ನವನ್ನು ಕನ್ವೇಯರ್ 2 ರ ಮೇಲೆ ಏರಿಸಿದಾಗ, ಚಲಿಸಬಲ್ಲ ಸ್ಟಾಪ್ 25, ಸಂಕುಚಿತ ಸ್ಪ್ರಿಂಗ್ 27 ರ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ, ಚಾಲಕ 21 ಗೆ ಬಲವನ್ನು ರವಾನಿಸುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಶಾಫ್ಟ್ 16 ಅನ್ನು ತಿರುಗಿಸಲು ಮತ್ತು ಬೆವೆಲ್ ಗೇರ್ 18 ಮತ್ತು 19, ಶಾಫ್ಟ್ ಮೂಲಕ ಕಾರಣವಾಗುತ್ತದೆ ಪಿನ್ 29 ನೊಂದಿಗೆ 17. ಕನ್ವೇಯರ್ 3 ನಲ್ಲಿ ಉತ್ಪನ್ನವನ್ನು ಸ್ಥಾಪಿಸಿದ ನಂತರ, ಅದರ ಡ್ರೈವ್ ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ (ಚಿತ್ರ 32 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ) ಮತ್ತು ಉತ್ಪನ್ನವು ಪಿನ್ 29 ಅನ್ನು ಬಿಟ್ಟು ಅಗತ್ಯವಿರುವ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ. ಉತ್ಪನ್ನದಿಂದ ಮುಕ್ತವಾದ ಟಿಲ್ಟರ್ ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಮರಳುತ್ತದೆ ಮತ್ತು ಹೈಡ್ರಾಲಿಕ್ ಸಿಲಿಂಡರ್ 11 ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ; ಅದರ ರಾಡ್ 10 ರ ರಾಡ್ ಅನ್ನು ಶಾಫ್ಟ್ 5 ಅಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ವಿಸ್ತರಿಸುತ್ತದೆ ಮತ್ತು ಗೇರ್ 9 ಅನ್ನು ತಿರುಗಿಸುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ದೇಹ 13 ನೊಂದಿಗೆ 6 ಮತ್ತು 7 ಸನ್ನೆಗಳು ಮತ್ತು ಪಿನ್ 29 ಅನ್ನು ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಿಸಿ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪಿನ್ 29 ರೊಂದಿಗಿನ ಶಾಫ್ಟ್ 17 ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ 180 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಇದನ್ನು ವಸಂತ 28 ಮತ್ತು ಚಲಿಸಬಲ್ಲ ಸ್ಟಾಪ್ 26 ರಿಂದ ನಡೆಸಲಾಗುತ್ತದೆ.

ಅಕ್ಕಿ. 33. ಕ್ರ್ಯಾಂಕ್-ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ಸ್ಲೈಡರ್ ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವುದರೊಂದಿಗೆ ಮಿಶ್ರಣ ಮಾಡಲು ಅನುಮತಿಸುತ್ತದೆ.
ವೇಗ ಸ್ಥಿರಕ್ಕೆ ಹತ್ತಿರದಲ್ಲಿದೆ.
ಅಂಜೂರದಲ್ಲಿ. ಚಿತ್ರ 33 ಲಿವರ್-ಕ್ರ್ಯಾಂಕ್ ಸಿಸ್ಟಮ್ನೊಂದಿಗೆ ಸಂಯೋಜಿತವಾದ ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದು ಸ್ಲೈಡರ್ ಅನ್ನು ನಿರ್ದಿಷ್ಟ ಸಮಯದವರೆಗೆ ಸ್ಥಿರತೆಗೆ ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಚಲಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಈ ಕಾರ್ಯವಿಧಾನವು ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇವುಗಳಲ್ಲಿ ಬೆಂಬಲ ಜರ್ನಲ್ಗಳು 2 ಅನ್ನು ಫ್ರೇಮ್ನಲ್ಲಿ ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ, ಎರಡು-ತೋಳಿನ ಲಿವರ್ 3, ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ರ ಕ್ರ್ಯಾಂಕ್ ಪಿನ್ನಲ್ಲಿ ಪ್ರಧಾನವಾಗಿ ಜೋಡಿಸಲಾಗಿದೆ ಮತ್ತು ಅಕ್ಷಗಳು 6 ಮೂಲಕ ಒಂದು ತೋಳಿನಿಂದ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 4 ಮತ್ತು ಸ್ಲೈಡರ್ 5, ಮತ್ತು ಇನ್ನೊಂದು ತೋಳಿನಿಂದ ರಾಡ್ 7 ನೊಂದಿಗೆ, ಸ್ಲೈಡ್ 8 ರಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಅಕ್ಷ 9 ನಲ್ಲಿ ತೂಗಾಡುತ್ತಿದೆ, ಆದರೆ ರಾಡ್ 7 ಅನ್ನು ರಾಕರ್ ಆರ್ಮ್ 11 ನೊಂದಿಗೆ ಅಕ್ಷ 12 ರ ಕಾರಣದಿಂದ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಅಕ್ಷ 10 ರ ಮೂಲಕ ಚೌಕಟ್ಟಿನ ಮೇಲೆ ಜೋಡಿಸಲಾಗಿದೆ. ಸ್ಲೈಡರ್ 5 ಕೆಳಕ್ಕೆ ಚಲಿಸಿದಾಗ, ರಾಕರ್ ಆರ್ಮ್ 11, ರಾಡ್ 7, ಸ್ಲೈಡ್ 8 ಅನ್ನು ಒಳಗೊಂಡಿರುವ ರಾಕರ್-ಲಿವರ್ ವ್ಯವಸ್ಥೆಯು ಎರಡು ತೋಳಿನ ಲಿವರ್ 3 ರ ಹೆಚ್ಚುವರಿ ತಿರುಗುವಿಕೆಯನ್ನು ನಡೆಸುತ್ತದೆ ಕ್ರ್ಯಾಂಕ್ ಶಾಫ್ಟ್ 1 ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ಕ್ರ್ಯಾಂಕ್ ಪಿನ್, ಇದು ಒಂದು ನಿರ್ದಿಷ್ಟ ಸಮಯದಲ್ಲಿ ಸ್ಲೈಡರ್ನ ವೇಗವು ನಿಧಾನಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಅದರ ಮೌಲ್ಯವು ಸ್ಥಿರಕ್ಕೆ ಹತ್ತಿರವಾಗುತ್ತದೆ ಎಂಬ ಅಂಶಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಹಲವಾರು ತಾಂತ್ರಿಕ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ನಿರ್ವಹಿಸುವಾಗ ಸ್ಲೈಡರ್ನ ಈ ಚಲನೆಯ ವಿಧಾನವು ಅವಶ್ಯಕವಾಗಿದೆ, ಉದಾಹರಣೆಗೆ, ರೇಖಾಚಿತ್ರ.
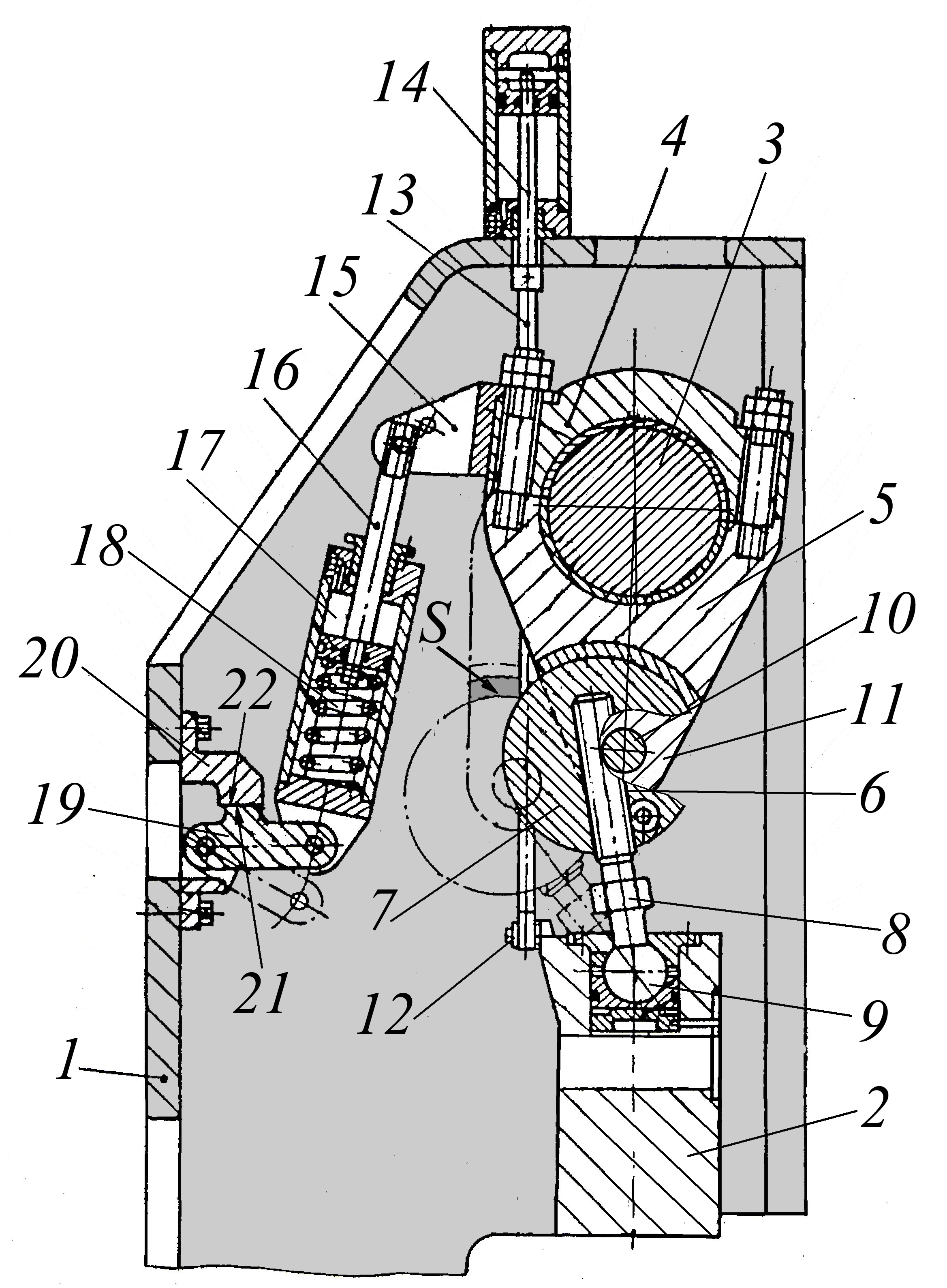
ಚಿತ್ರ 34 ಕ್ಲಚ್ಲೆಸ್ ಸಕ್ರಿಯಗೊಳಿಸುವ ಸಾಧನದೊಂದಿಗೆ ಪ್ರೆಸ್ನ ಕ್ರ್ಯಾಂಕ್-ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಆಕ್ಯೂವೇಟರ್ನ ವಿನ್ಯಾಸ
ಚಿತ್ರ 34 ಕ್ಲಚ್ಲೆಸ್ ಸಕ್ರಿಯಗೊಳಿಸುವಿಕೆಗಾಗಿ ಸಾಧನದೊಂದಿಗೆ ಪ್ರೆಸ್ನ ಕ್ರ್ಯಾಂಕ್-ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಆಕ್ಯೂವೇಟರ್ನ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದು
ಬ್ರೇಕಿಂಗ್ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಆಧಾರದ ಮೇಲೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಇದು ಫ್ರೇಮ್ 1 ರ ಮಾರ್ಗದರ್ಶಿಗಳಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ಸ್ಲೈಡರ್ 2 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದು ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ರಿಂದ ಜೋಡಿಸಲಾದ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 4 ಮೂಲಕ ಪರಸ್ಪರ ಚಲನೆಯ ಡ್ರೈವ್ ಅನ್ನು ಪಡೆಯುತ್ತದೆ, ಗೋಲಾಕಾರದ ಹಿಂಜ್ 9 ಅನ್ನು ಬಳಸಿಕೊಂಡು ಸ್ಲೈಡರ್ 2 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಆದರೆ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 4 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ ಡ್ರೈವಿಂಗ್ 5 ಮತ್ತು ಚಾಲಿತ 6 ಮೊಣಕೈ, ಸಿಲಿಂಡರಾಕಾರದ ಮೇಲ್ಮೈಗಳು ಹಿಂಜ್ ಜಾಯಿಂಟ್ ಅನ್ನು ರೂಪಿಸುತ್ತವೆ, ಎರಡನೆಯದು ಡಿಸ್ಕ್ 7 ಮತ್ತು ಹೊಂದಾಣಿಕೆ ಸ್ಕ್ರೂ 8 ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಮತ್ತು ಡಿಸ್ಕ್ 7 ಅನ್ನು ಆಕ್ಸಲ್ 10 ನೊಂದಿಗೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ, ಇದು ಕಣ್ಣುಗಳ 11 ರ ಅನುಗುಣವಾದ ರಂಧ್ರಗಳಲ್ಲಿದೆ. ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ಭಾಗ 5 ಅನ್ನು ಚಾಲನೆ ಮಾಡುವುದು 4. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಆಕ್ಸಲ್ಗಳು 10 ಡಿಸ್ಕ್ 7 ರ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ವಿಲಕ್ಷಣವಾಗಿ ನೆಲೆಗೊಂಡಿವೆ, ಇದು ಡ್ರೈವಿಂಗ್ 5 ರ ಸಿಲಿಂಡರಾಕಾರದ ಮೇಲ್ಮೈಗಳ ನಡುವಿನ ಅಂತರವನ್ನು ಖಾತ್ರಿಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಕನೆಕ್ಟಿಂಗ್ನ ಚಾಲಿತ 6 ಮೊಣಕಾಲುಗಳು ರಾಡ್ 4, ಇದು ಪ್ರೆಸ್ನ ಕ್ರ್ಯಾಂಕ್-ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಕಾರ್ಯವಿಧಾನವನ್ನು ನಿಷ್ಕ್ರಿಯಗೊಳಿಸುವ ಸಮಯದಲ್ಲಿ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ. ಬ್ರೇಕಿಂಗ್ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ 4 ಆಫ್ ಸ್ಥಾನದಲ್ಲಿದ್ದಾಗಲೂ ಅದು ಮೇಲಿನ ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿರುವುದು ಖಾತರಿಯಾಗಿದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಸ್ಲೈಡರ್ 2 ಅನ್ನು ಬ್ಯಾಲೆನ್ಸರ್ ರಾಡ್ 14 ಗೆ ಅಕ್ಷ 12 ಮತ್ತು ರಾಡ್ 13 ಮೂಲಕ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಒಂದು ಬ್ರಾಕೆಟ್ 15 ಅನ್ನು ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ನ ಡ್ರೈವಿಂಗ್ ಮೊಣಕೈ 5 ಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿಗದಿಪಡಿಸಲಾಗಿದೆ, ಇದು ಕಂಟ್ರೋಲ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ರ ರಾಡ್ 16 ಗೆ ಕ್ಲಚ್ಲೆಸ್ ಆಕ್ಟಿವೇಶನ್ ಮೆಕ್ಯಾನಿಸಂಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಆದರೆ ಅದರ ದೇಹವು ಬ್ರಾಕೆಟ್ 20 ಗೆ ಪಿವೋಟ್ ಆಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಹಿಂಭಾಗದ ಗೋಡೆಯ ಮೇಲೆ ಜೋಡಿಸಲಾಗಿದೆ. ಪ್ರೆಸ್ ಫ್ರೇಮ್ 1, ರಾಕರ್ ಆರ್ಮ್ 19 ಮೂಲಕ. ಬ್ರಾಕೆಟ್ 20 ಪ್ರೊಜೆಕ್ಷನ್ 22 ಅನ್ನು ಹೊಂದಿದೆ, ಮತ್ತು ರಾಕರ್ 19 ಪ್ರೊಜೆಕ್ಷನ್ 21 ಅನ್ನು ಹೊಂದಿದೆ, ಇದು ಸಾಂದರ್ಭಿಕ ಸಂವಹನದ ಸಾಧ್ಯತೆಯನ್ನು ಹೊಂದಿದೆ.
ಕಾರ್ಯವಿಧಾನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ರ ನಿರಂತರ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ, ಎಲೆಕ್ಟ್ರೋ-ನ್ಯೂಮ್ಯಾಟಿಕ್ ಆಟೊಮೇಷನ್ ಸಿಸ್ಟಮ್ನ ಆಜ್ಞೆಯ ಮೇರೆಗೆ, ಕಂಟ್ರೋಲ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ರ ರಾಡ್ ಕುಹರಕ್ಕೆ ಸಂಕುಚಿತ ಗಾಳಿಯನ್ನು ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಮತ್ತು ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ ದೇಹದ ಸ್ಪಷ್ಟ ಸಂಪರ್ಕಕ್ಕೆ ಧನ್ಯವಾದಗಳು ರಾಕರ್ ಆರ್ಮ್ 19, ಅದರ ರಾಡ್ 16 ಮತ್ತು ದೇಹದ ಪರಸ್ಪರ ವಿರುದ್ಧವಾದ ಚಲನೆಗಳು ಸಂಭವಿಸುತ್ತವೆ, ಇದು ರಾಕರ್ ಆರ್ಮ್ 19 ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗಲು ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ಮುಂಚಾಚಿರುವಿಕೆ 21 ಬ್ರಾಕೆಟ್ 20 ರ ಮುಂಚಾಚಿರುವಿಕೆ 22 ಮತ್ತು ನ್ಯೂಮ್ಯಾಟಿಕ್ನ ರಾಡ್ 16 ರ ವಿರುದ್ಧ ನಿಂತಿದೆ ಸಿಲಿಂಡರ್, ಸ್ಪ್ರಿಂಗ್ 18 ಅನ್ನು ಸಂಕುಚಿತಗೊಳಿಸುವುದು, ಬ್ರಾಕೆಟ್ 15 ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅದರೊಂದಿಗೆ ಅದು ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ ಮತ್ತು ಆ ಮೂಲಕ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 4 ರ ಡ್ರೈವಿಂಗ್ 5 ಮತ್ತು ಚಾಲಿತ 6 ಅನ್ನು ಮುಚ್ಚಿದ ಸ್ಥಾನದಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 34 ರಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಚಲನೆಯನ್ನು ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ರಿಂದ ಸ್ಲೈಡರ್ 2 ಗೆ ಮುಚ್ಚಿದ ಕನೆಕ್ಟಿಂಗ್ ರಾಡ್ ಮೂಲಕ ವರ್ಗಾಯಿಸಲಾಗುತ್ತದೆ 4. ಕಂಟ್ರೋಲ್ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ರ ರಾಡ್ ಕುಹರದೊಳಗೆ ಸಂಕುಚಿತ ಗಾಳಿಯ ಪೂರೈಕೆಯು ಎಲೆಕ್ಟ್ರೋ-ನ್ಯೂಮ್ಯಾಟಿಕ್ ಆಟೊಮೇಷನ್ ಸಿಸ್ಟಮ್ನಿಂದ ಆಜ್ಞೆಯನ್ನು ನಿಲ್ಲಿಸಿದಾಗ, ತಿರುಗುವ ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ಮತ್ತು ಈಕ್ವಲೈಜರ್ 14 ರ ಬಲದ ಅಡಿಯಲ್ಲಿ, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಮೊಣಕೈಗಳು 5 ಮತ್ತು 6 ಸಂಭವಿಸುತ್ತವೆ 4 ಮತ್ತು ಸಂಪರ್ಕದಿಂದ ಹಿಂಜ್ ಅನ್ನು ರೂಪಿಸುವ ಅವುಗಳ ಸಿಲಿಂಡರಾಕಾರದ ಮೇಲ್ಮೈಗಳನ್ನು ತೆಗೆದುಹಾಕುತ್ತದೆ, ಇದು ಆಕ್ಸಲ್ 10 ರ ವಿಲಕ್ಷಣ ಸ್ಥಾಪನೆಯಿಂದಾಗಿ ಕಾರಣವಾಗುತ್ತದೆ ಡಿಸ್ಕ್ 7 ರ ಅಕ್ಷ, ಅವುಗಳ ನಡುವೆ ಅಂತರ ಎಸ್ ರಚನೆಗೆ. ನಂತರ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 4 ರ ಮೊಣಕಾಲುಗಳು 5 ಮತ್ತು 6 ಅವುಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಆಕ್ಸಲ್ 10 ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತವೆ, ಮತ್ತು ಸ್ಲೈಡರ್ 2, ಬ್ಯಾಲೆನ್ಸರ್ 14 ರ ಬಲದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ನಿರಂತರವಾಗಿ ತಿರುಗುತ್ತದೆ. ಮೇಲಿನ ಸ್ಥಾನ. ಅದೇ ಸಮಯದಲ್ಲಿ, ವಸಂತ 18 ರ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ, ನಿಯಂತ್ರಣ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ನ ದೇಹವು ಚಲಿಸುತ್ತದೆ ಮತ್ತು ಮುಕ್ತವಾಗಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ 19 ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗುತ್ತದೆ. ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ರ ದೇಹವು ಅದರ ಕಡಿಮೆ ಸ್ಥಾನವನ್ನು ತಲುಪಿದ ನಂತರ, ಅದು ಸಮತಟ್ಟಾದ - ಸಮಾನಾಂತರ ಚಲನೆಯನ್ನು ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಬ್ರಾಕೆಟ್ 15 ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ 19 ರೊಂದಿಗಿನ ಹಿಂಜ್ ಸಂಪರ್ಕದ ಬಿಂದುಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ತಿರುಗುತ್ತದೆ, ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ 3 ತಿರುಗುವಿಕೆಯಿಂದ ಚಲನೆಯನ್ನು ಸ್ವೀಕರಿಸುತ್ತದೆ. ಸ್ಥಿರವಾದ ವೇಗದಲ್ಲಿ, ರಾಡ್ ಕುಹರದ ನ್ಯೂಮ್ಯಾಟಿಕ್ ಸಿಲಿಂಡರ್ 17 ಕ್ಕೆ ಸಂಕುಚಿತ ಗಾಳಿಯ ನಂತರದ ಪೂರೈಕೆಯೊಂದಿಗೆ, ಸ್ಲೈಡರ್ 2 ಕೆಲಸದ ಹೊಡೆತವನ್ನು ಮಾಡುತ್ತದೆ.
ಗೇರ್-ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು.
ಗೇರ್ಗಳೊಂದಿಗೆ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ಸಂಯೋಜನೆಯು ಎರಡಕ್ಕೂ ವಿಶಿಷ್ಟವಲ್ಲದ ಹೊಸ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ರಚಿಸಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಹೆಚ್ಚಾಗಿ, ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಎತ್ತರವನ್ನು ಪಡೆಯಲು ಬಳಸಲಾಗುತ್ತದೆ, ಆದರೆ ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಅವರು ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯ ವಿವಿಧ ಪಥಗಳನ್ನು ಪಡೆಯಲು ಸಾಧ್ಯವಾಗುವಂತೆ ಮಾಡಬಹುದು, ಜೊತೆಗೆ ಅದರ ಚಲನೆಯ ಪ್ರಮಾಣ ಮತ್ತು ವೇಗವನ್ನು ಬದಲಾಯಿಸಬಹುದು.
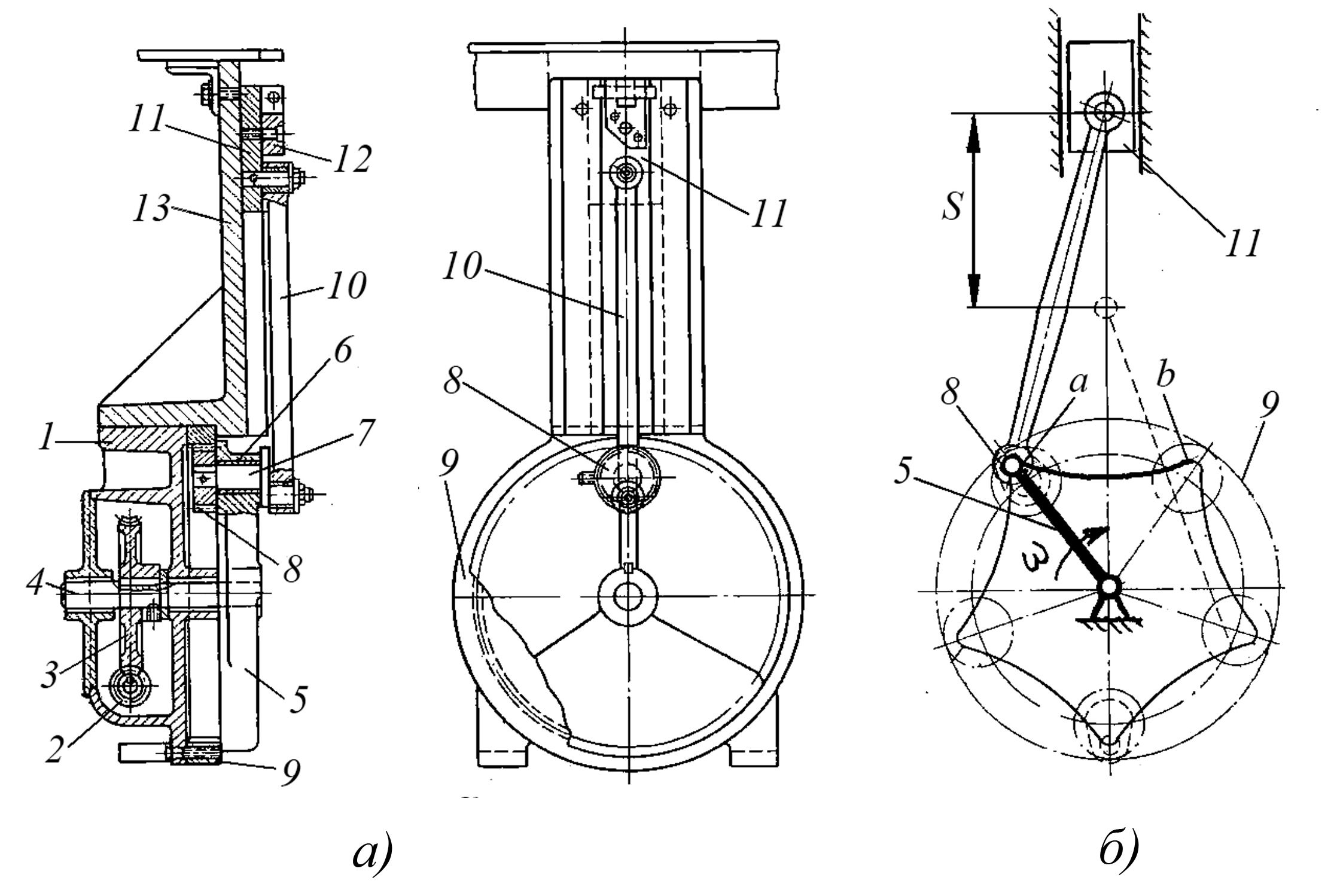
ಚಿತ್ರ 35 ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ, ಅದರ ಔಟ್ಪುಟ್ ಲಿಂಕ್ - ತೀವ್ರ ಮುಂದಿರುವ ಸ್ಥಾನದಲ್ಲಿರುವ ಸ್ಲೈಡರ್ ಅದನ್ನು ನಿಲ್ಲುವಂತೆ ಮಾಡುತ್ತದೆ
ಚಿತ್ರ 35 ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದರ ಔಟ್ಪುಟ್ ಲಿಂಕ್, ಸ್ಲೈಡರ್, ತೀವ್ರ ಫಾರ್ವರ್ಡ್ ಸ್ಥಾನದಲ್ಲಿ ಡ್ರೈವ್ ಲಿಂಕ್ನ ತಿರುಗುವಿಕೆಯ ನಿರ್ದಿಷ್ಟ ಕೋನದಲ್ಲಿ ಸ್ಟಾಪ್ ಮಾಡುತ್ತದೆ - ಕ್ರ್ಯಾಂಕ್. ಇದು ವಸತಿ 1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದರಲ್ಲಿ ವರ್ಮ್ ಗೇರ್ 2, 3 ಇದೆ, ಮತ್ತು ಅದರ ಚಾಲಿತ ಶಾಫ್ಟ್ 4 ನಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ 5 ಅನ್ನು ನಿಗದಿಪಡಿಸಲಾಗಿದೆ, ಇದು ಗ್ರಹಗಳ ಗೇರ್ ಕ್ಯಾರಿಯರ್ ಆಗಿದೆ, ಅದರ ರಂಧ್ರದಲ್ಲಿ ಸ್ಲೈಡಿಂಗ್ನಲ್ಲಿ ವಿಲಕ್ಷಣ ಪಿನ್ 7 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ. ಬೇರಿಂಗ್ 6, ಅದರ ಒಂದು ತುದಿಯಲ್ಲಿ ಉಪಗ್ರಹ 8 ಅನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿವಾರಿಸಲಾಗಿದೆ , ಕ್ರೌನ್ ವೀಲ್ 9 ಅನ್ನು ಹೌಸಿಂಗ್ 1 ನಲ್ಲಿ ಅಳವಡಿಸಲಾಗಿದೆ, ಮತ್ತು ಇನ್ನೊಂದು ತುದಿಯು ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 10 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಇದು ಸ್ಲೈಡರ್ 11 ಚಲಿಸುವ ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ನೀಡುತ್ತದೆ ಚೌಕಟ್ಟಿನ ಮಾರ್ಗದರ್ಶಿಗಳು 12 ರಲ್ಲಿ 13. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪಿನ್ 7 ರ ವಿಕೇಂದ್ರೀಯತೆಯ ಮೌಲ್ಯವು ಉಪಗ್ರಹದ ಮುಖ್ಯ ವೃತ್ತದ ತ್ರಿಜ್ಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ 8. ಸಾಧನದ ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ವಿರಾಮದ ಸಮಯದಲ್ಲಿ, ವಿಲಕ್ಷಣ ಪಿನ್ 7 ಚಲಿಸುತ್ತದೆ ಕ್ರ್ಯಾಂಕ್ 5 ಮತ್ತು ಸ್ಲೈಡರ್ 11 ನೊಂದಿಗೆ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 10 ರ ಸಂಪರ್ಕದ ಅಕ್ಷಗಳ ನಡುವಿನ ಅಂತರಕ್ಕೆ ಸರಿಸುಮಾರು ಸಮಾನವಾಗಿರುವ ಆರ್ಕ್ ಉದ್ದಕ್ಕೂ, ಇದು ಸ್ಲೈಡರ್ಗೆ ಚಲನೆಯನ್ನು ನೀಡದೆ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ (ಚಿತ್ರ ನೋಡಿ . 35b). ಸಾಧನದ ಅಂತಹ ಚಲನಶಾಸ್ತ್ರದೊಂದಿಗೆ, ವಿಲಕ್ಷಣ ಪಿನ್ 7 ರ ಚಲನೆಯ ಪಥವು ಐದು ಮುಂಚಾಚಿರುವಿಕೆಗಳೊಂದಿಗೆ ಮುಚ್ಚಿದ ವಕ್ರರೇಖೆಯಾಗಿದೆ, ಅದರ ಮೇಲೆ ತೀವ್ರ ಸ್ಥಾನದಲ್ಲಿ ಸ್ಲೈಡರ್ 11 ರ ವಿರಾಮವನ್ನು ವಿಭಾಗದಿಂದ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ a–b ಚಾರ್ಟ್ನಲ್ಲಿ. ಸಂಪರ್ಕಿಸುವ ರಾಡ್ 10 ರ ಉದ್ದವು ಪಥದ ವಿಭಾಗಕ್ಕೆ ಆಕಾರದಲ್ಲಿ ಹತ್ತಿರವಿರುವ ಆರ್ಕ್ನ ತ್ರಿಜ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಎಂಬ ಅಂಶದಿಂದಾಗಿ ಸ್ಲೈಡರ್ 11 ರ ವಿರಾಮ ಸಂಭವಿಸುತ್ತದೆ. a-b ಕ್ರ್ಯಾಂಕ್ 5.
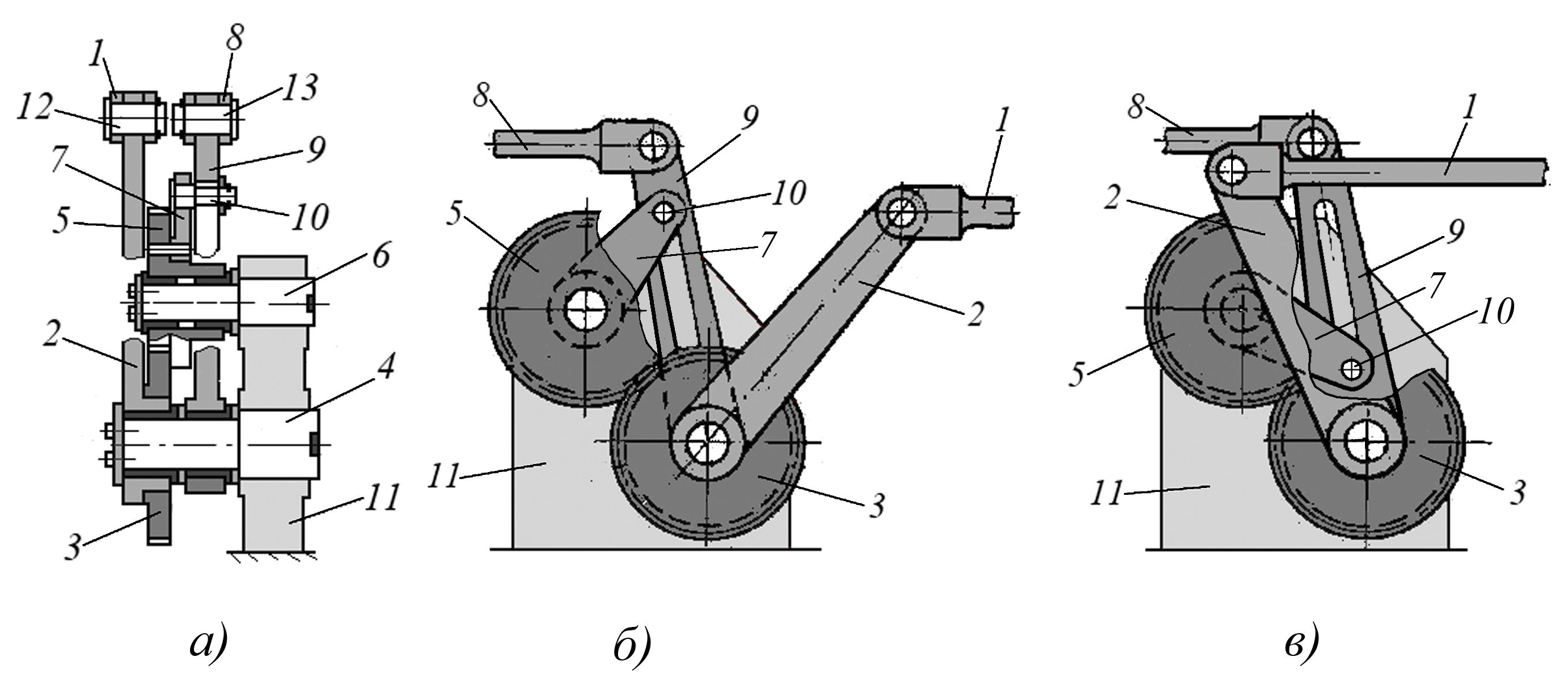
ಅಂಜೂರ 36 ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವು ಡ್ರೈವಿಂಗ್ ಒಂದಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಚಾಲಿತ ಲಿಂಕ್ನ ಎರಡು ಬಾರಿ ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ಪಡೆಯಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ.
ಚಿತ್ರ 36 ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ತೋರಿಸುತ್ತದೆ, ಇದು ಡ್ರೈವಿಂಗ್ ಒಂದಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಚಾಲಿತ ಲಿಂಕ್ನ ಎರಡು ಬಾರಿ ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ಪಡೆಯಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಈ ಡ್ರೈವ್ನ ಪ್ರಮುಖ ಅಂಶವೆಂದರೆ ರಾಡ್ 1, ಇದು ಲಿವರ್ 2 ಗೆ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ನೀಡುತ್ತದೆ, ಗೇರ್ 3 ಗೆ ಸಂಪರ್ಕಪಡಿಸುತ್ತದೆ ಮತ್ತು ಅಕ್ಷ 4 ನಲ್ಲಿ ಈ ಚಕ್ರದೊಂದಿಗೆ ಮುಕ್ತವಾಗಿ ತಿರುಗುತ್ತದೆ. ಗೇರ್ 3 ಚಕ್ರ 5 ಗೆ ತಿರುಗುವಿಕೆಯನ್ನು ನೀಡುತ್ತದೆ, ಅಕ್ಷ 6 ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಲಿವರ್ 7 ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಪಿನ್ 10 ಲಿವರ್ 7, ಸ್ಲೈಡ್ 9 ರ ತೋಡಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ, ರಾಡ್ 8 ಗೆ ಚಲನೆಯನ್ನು ನೀಡುತ್ತದೆ. ಅಕ್ಷಗಳು 4 ಮತ್ತು 6 ಅನ್ನು ಫ್ರೇಮ್ನಲ್ಲಿ ಅಳವಡಿಸಲಾಗಿರುವ ಸ್ಥಾಯಿ ವಸತಿ 11 ರಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ. ಚಿತ್ರ 36b,c ನಲ್ಲಿ, ರಾಡ್ 1 ಅನ್ನು ತೀವ್ರ ಬಲ ಮತ್ತು ಎಡ ಸ್ಥಾನಗಳಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ, ಇದು ಅದರ ಚಲನೆಯ ಚಕ್ರದ ಆರಂಭ ಮತ್ತು ಮಧ್ಯಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಎರಡೂ ಸಂದರ್ಭಗಳಲ್ಲಿ ಸ್ಲೈಡ್ 9 ಒಂದೇ ಸ್ಥಾನವನ್ನು ಆಕ್ರಮಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಅದು ಪೂರ್ಣ ಚಕ್ರವನ್ನು ಪೂರ್ಣಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಮರಳುತ್ತದೆ. ಲಿವರ್ 2 ಅನ್ನು ಚಿತ್ರ 36a ನಲ್ಲಿ ತೋರಿಸಿರುವ ಸ್ಥಾನದಿಂದ ಎಡಕ್ಕೆ ರಾಡ್ 1 ಮೂಲಕ ಚಲಿಸಲಾಗುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಗೇರ್ 3 ಕ್ರಾಂತಿಯ ಒಂದು ನಿರ್ದಿಷ್ಟ ಭಾಗವನ್ನು ಮಾಡುತ್ತದೆ. ಚಕ್ರ 3 ನೊಂದಿಗೆ ಜಾಲರಿಯಲ್ಲಿರುವ ಗೇರ್ 5, ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಅದೇ ತಿರುಗುವಿಕೆಯನ್ನು ಮಾಡುತ್ತದೆ. ಲಿವರ್ 7, ಚಕ್ರ 5 ಗೆ ಸಂಪರ್ಕಗೊಂಡಿದೆ, ಅದರೊಂದಿಗೆ ಸುತ್ತುತ್ತದೆ, ಮತ್ತು 10 ಬೆರಳನ್ನು ಲಿಂಕ್ 9 ರ ತೋಡು ಉದ್ದಕ್ಕೂ ಚಲಿಸುತ್ತದೆ. ಬೆರಳು 10 ಅಕ್ಷ 6 ರ ಮಧ್ಯಭಾಗವನ್ನು ದಾಟುವ ಮೊದಲು, ಲಿಂಕ್ ಬಲಕ್ಕೆ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಅದರ ತೀವ್ರ ಸ್ಥಾನವನ್ನು ತಲುಪುತ್ತದೆ (ಚಿತ್ರ ನೋಡಿ. 36c). ರಾಡ್ 1 ರ ಮತ್ತಷ್ಟು ಚಲನೆಯೊಂದಿಗೆ, ಬೆರಳು 10 ಅಕ್ಷ 6 ರ ಮಧ್ಯಭಾಗದ ಕೆಳಗೆ ಬೀಳುತ್ತದೆ ಮತ್ತು ಸ್ಲೈಡ್ 9 ಅನ್ನು ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ, ಅಂದರೆ ಎಡಕ್ಕೆ. ರಾಡ್ 1 ತೀವ್ರ ಎಡ ಸ್ಥಾನವನ್ನು ತಲುಪುವ ಕ್ಷಣದಲ್ಲಿ, ಸ್ಲೈಡ್ 9 ಸಹ ಅದರ ತೀವ್ರ ಎಡ ಸ್ಥಾನವನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ, ರಾಡ್ 1 ಕೇವಲ ಮುಂದಕ್ಕೆ ಚಲಿಸುವಾಗ ಎರಡು ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ. ರಾಡ್ 1 ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ ಮಾಡುವ ಸಮಯದಲ್ಲಿ, ಲಿಂಕ್ 9 ಮತ್ತೊಂದು ಡಬಲ್ ಸ್ಟ್ರೋಕ್ ಮಾಡುತ್ತದೆ.
ಚಿತ್ರ 37 ಚಾಲಿತ ಶಾಫ್ಟ್ನ ಆವರ್ತಕ ತಿರುಗುವಿಕೆಯ ಕೋನವನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಬದಲಾಯಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ.
ಚಾಲಿತ ಶಾಫ್ಟ್ನ ಆವರ್ತಕ ತಿರುಗುವಿಕೆಯ ಕೋನವನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಬದಲಾಯಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸವನ್ನು ಚಿತ್ರ 37 ತೋರಿಸುತ್ತದೆ. ಇದು ಚಾಲಿತ ಶಾಫ್ಟ್ 1 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಅದರ ಮೇಲೆ ಗೇರ್ 2 ಮತ್ತು ರಾಟ್ಚೆಟ್ ವೀಲ್ 3 ಅನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿವಾರಿಸಲಾಗಿದೆ, ಹಾಗೆಯೇ ರಾಕರ್ ಆರ್ಮ್ 4 ಅನ್ನು ಶಾಫ್ಟ್ 1 ನಲ್ಲಿ ತಿರುಗಿಸುವ ಸಾಧ್ಯತೆಯೊಂದಿಗೆ ಜೋಡಿಸಲಾಗಿದೆ, ಆದರೆ ಗೇರ್ 2 ಗೇರ್ನೊಂದಿಗೆ ನಿರಂತರ ತೊಡಗಿಸಿಕೊಂಡಿದೆ. 5, ಇದು ರಾಕರ್ ಆರ್ಮ್ 4 ನಲ್ಲಿ ಅಕ್ಷ 12 ರ ಮೂಲಕ ಪ್ರಮುಖವಾಗಿ ಜೋಡಿಸಲ್ಪಟ್ಟಿದೆ ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ 6 ಅನ್ನು ಒಯ್ಯುತ್ತದೆ, ಅಕ್ಷ 13 ರ ಮೂಲಕ ರಾಡ್ 7 ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ಅಕ್ಷ 10 ರ ಮೂಲಕ ಡ್ರೈವ್ ರಾಡ್ 8 ಗೆ ಪ್ರಮುಖವಾಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ರಾಕರ್ ಆರ್ಮ್ 4 ನಲ್ಲಿ ರಾಟ್ಚೆಟ್ ವೀಲ್ 3 ರ ಸಂಪರ್ಕದಲ್ಲಿ ಸ್ಪ್ರಿಂಗ್-ಲೋಡೆಡ್ ಪಾವ್ಲ್ 11 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಸ್ಲೈಡರ್ 9 ರಲ್ಲಿ ಅಕ್ಷ 10 ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಇದು ರಾಕರ್ ಆರ್ಮ್ 4 ರ ಉದ್ದದ ತೋಡು ಉದ್ದಕ್ಕೂ ಚಲಿಸಬಹುದು. ಚಿತ್ರ 37a ರಲ್ಲಿ, ಸ್ಲೈಡರ್ 9 ಅನ್ನು ಅದರ ಕಡಿಮೆ ಸ್ಥಾನದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ
ಕಾರ್ಯವಿಧಾನವು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ರಾಡ್ 8, ಪರಸ್ಪರ ಚಲನೆಯನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ, ರಾಕರ್ ಆರ್ಮ್ 4 ಗೆ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ನೀಡುತ್ತದೆ. ರಾಡ್ 8 ಮುಂದಕ್ಕೆ ಚಲಿಸಿದಾಗ, ಪೌಲ್ 11 ರಾಟ್ಚೆಟ್ ವೀಲ್ 3 ನೊಂದಿಗೆ ತೊಡಗಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಚಾಲಿತ ಶಾಫ್ಟ್ 1, ಜೊತೆಗೆ ಗೇರ್ ವೀಲ್ 2 ಜೊತೆಗೆ , ರಾಕರ್ ಆರ್ಮ್ 4 ನೊಂದಿಗೆ ರಾಕಿಂಗ್ ಚಲನೆಯನ್ನು ಮಾಡುತ್ತದೆ. ರಾಡ್ ರಿವರ್ಸ್ 8 ರಲ್ಲಿ ಚಲಿಸಿದಾಗ, ರಾಟ್ಚೆಟ್ ವೀಲ್ ಮತ್ತು ಚಾಲಿತ ಶಾಫ್ಟ್ 1 ರ ಹಲ್ಲುಗಳ ಉದ್ದಕ್ಕೂ ಪಾಲ್ 11 ಸ್ಲೈಡ್ಗಳು, ಗೇರ್ 2 ಜೊತೆಗೆ ಸ್ಥಿರವಾಗಿ ಉಳಿಯುತ್ತದೆ. ರಾಕರ್ ಆರ್ಮ್ 4 ರ ಹಿಮ್ಮುಖ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ, ಗೇರ್ 5, ಈ ಸಮಯದಲ್ಲಿ ಸ್ಥಾಯಿ ಗೇರ್ ವೀಲ್ 2 ರ ಉದ್ದಕ್ಕೂ ಉರುಳುತ್ತದೆ, ಅಕ್ಷ 12 ನಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ 6 ಅನ್ನು ತಿರುಗಿಸುತ್ತದೆ, ಇದು ರಾಡ್ 7 ಗೆ ಹಿಂಜ್ ಆಗಿ ಸಂಪರ್ಕ ಹೊಂದಿದ್ದು, ಫ್ಲಾಟ್ ಅನ್ನು ನೀಡುತ್ತದೆ, ಅದಕ್ಕೆ ಸಮಾನಾಂತರ ಚಲನೆ, ಮತ್ತು ಎರಡನೆಯದು ಅದೇ ಸಮಯದಲ್ಲಿ ರಾಕರ್ ಆರ್ಮ್ 4 ರ ತೋಡಿನಲ್ಲಿ ಸ್ಲೈಡರ್ 9 ಅನ್ನು ಚಲಿಸುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಅಕ್ಷ 10 ರಿಂದ ಶಾಫ್ಟ್ 1 ವರೆಗಿನ ಅಂತರವು ಹೆಚ್ಚಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ಗೇರ್ 2 ಮತ್ತು ಗೇರ್ 5 ನಡುವಿನ ಗೇರ್ ಅನುಪಾತವನ್ನು ಎರಡಕ್ಕೆ ಸಮಾನವಾಗಿ ಆಯ್ಕೆ ಮಾಡಲಾಗಿರುವುದರಿಂದ, ಕ್ರ್ಯಾಂಕ್ 6 ರೊಂದಿಗಿನ ಗೇರ್ 5 180 ಡಿಗ್ರಿ ಕೋನದ ಮೂಲಕ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಸ್ಲೈಡರ್ 9 ರಾಕರ್ 4 ರ ತೋಡಿನಲ್ಲಿ ಮೇಲಿನ ಸ್ಥಾನವನ್ನು ಆಕ್ರಮಿಸುತ್ತದೆ (ಚಿತ್ರ 37 ಬಿ ನೋಡಿ ) ಆದ್ದರಿಂದ, ರಾಡ್ 8 ರ ಮುಂದಿನ ಫಾರ್ವರ್ಡ್ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ, ರಾಕರ್ ಆರ್ಮ್ 4 ರ ತಿರುಗುವಿಕೆಯ ಕೋನ ಮತ್ತು ಅದರ ಪ್ರಕಾರ, ಸ್ವಿಂಗ್ ತ್ರಿಜ್ಯದ ಹೆಚ್ಚಳದಿಂದಾಗಿ ಚಾಲಿತ ಶಾಫ್ಟ್ 1 ಕಡಿಮೆ ಇರುತ್ತದೆ. ರಾಡ್ 8 ಹಿಮ್ಮುಖವಾಗಿ ಚಲಿಸಿದಾಗ ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ 4 ತಿರುಗಿದಾಗ, ಸ್ಥಿರ ಗೇರ್ 2 ರ ಉದ್ದಕ್ಕೂ ಉರುಳುವ ಗೇರ್ 5 ಮತ್ತೆ 180 ಡಿಗ್ರಿ ಕೋನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಸ್ಲೈಡರ್ 9 ಚಿತ್ರ 37a ನಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ ಅದರ ಮೂಲ ಕೆಳಗಿನ ಸ್ಥಾನವನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ. , ಅದರ ನಂತರ ಕಾರ್ಯವಿಧಾನದ ಕಾರ್ಯಾಚರಣೆಯ ಚಕ್ರವು ಪುನರಾವರ್ತಿಸುತ್ತದೆ.
 ಚಿತ್ರ 38 ರೇಖೀಯ ಚಲನೆಗಾಗಿ ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ.
ಚಿತ್ರ 38 ರೇಖೀಯ ಚಲನೆಗಾಗಿ ಗೇರ್-ಲಿವರ್ ಯಾಂತ್ರಿಕತೆಯ ವಿನ್ಯಾಸ.
ಕಾರ್ಯವಿಧಾನಗಳ ಲೆಕ್ಕಾಚಾರಗಳು (ಚಲನಶಾಸ್ತ್ರ, ಶಕ್ತಿ, ಶಕ್ತಿ, ಶಕ್ತಿ), ಹಾಗೆಯೇ ಅವುಗಳ ಮುಖ್ಯ ರಚನಾತ್ಮಕ ಅಂಶಗಳು (ವಿಲಕ್ಷಣ ಮತ್ತು ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ಗಳು, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳು, ಸ್ಲೈಡರ್ಗಳು, ಲಿವರ್ಗಳು, ಹಿಂಜ್ ಕೀಲುಗಳು) ಕೆಲಸದಲ್ಲಿ ನೀಡಲಾಗಿದೆ.
ಕಳೆದ 20-25 ವರ್ಷಗಳಲ್ಲಿ ಮೆಕ್ಯಾನಿಕಲ್ ಎಂಜಿನಿಯರಿಂಗ್ನಲ್ಲಿನ ಬದಲಾವಣೆಗಳ ಹೊರತಾಗಿಯೂ, ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ವಿನ್ಯಾಸ ಸೇರಿದಂತೆ, ಪ್ರಾಥಮಿಕವಾಗಿ ಡ್ರೈವ್ನ ಪ್ರಕಾರ ಮತ್ತು ಅದರ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗೆ ಸಂಬಂಧಿಸಿದೆ, ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಅವುಗಳ ವಿಶಿಷ್ಟ ಪ್ರಯೋಜನಗಳಿಂದಾಗಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲ್ಪಡುತ್ತವೆ. ಈ ಅನುಕೂಲಗಳು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಹೆಚ್ಚಿನ ಕಾರ್ಯಾಚರಣೆಯ ವೇಗದಲ್ಲಿ, ಆಕ್ಯೂವೇಟರ್ನ ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯ ನಿರ್ದಿಷ್ಟ ಪಥವನ್ನು ಪಡೆಯಲು ಅನುಮತಿಸುತ್ತದೆ, ಜೊತೆಗೆ ಸಲಕರಣೆಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಚಕ್ರದ ನಿರ್ದಿಷ್ಟ ಅವಧಿಯಲ್ಲಿ ಪಲ್ಸ್ ತಾಂತ್ರಿಕ ಹೊರೆಗಳ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ ಇರುತ್ತದೆ. , ಅಗತ್ಯವಿರುವ ಶಕ್ತಿಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಕ್ರ್ಯಾಂಕ್ ಯಾಂತ್ರಿಕತೆಯ ಗುಣಲಕ್ಷಣಗಳನ್ನು ನಿರ್ದಿಷ್ಟವಾಗಿ ಬಳಸುವುದು. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಸರಳ ರಚನಾತ್ಮಕ ಅಂಶಗಳನ್ನು ಬಳಸಿಕೊಂಡು, ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ಹೆಚ್ಚಿಸಲು, ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಸ್ಟ್ರೋಕ್ನ ಪ್ರಮಾಣವನ್ನು ಬದಲಾಯಿಸಲು, ಡ್ರೈವ್ನ ಚಲನೆಯನ್ನು ಹೆಚ್ಚಿಸದೆ, ಮತ್ತು ಹಲವಾರು ಪರಿಹರಿಸಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಇತರ ಸಮಸ್ಯೆಗಳು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಹೈಡ್ರಾಲಿಕ್ ಅಥವಾ ಪ್ರೋಗ್ರಾಮೆಬಲ್ ಎಲೆಕ್ಟ್ರೋಮೆಕಾನಿಕಲ್ ಡ್ರೈವ್ ಈ ನಿಟ್ಟಿನಲ್ಲಿ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳೊಂದಿಗೆ ಸ್ಪರ್ಧಿಸುವುದಿಲ್ಲ, ಇದು ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಸಾಕಷ್ಟು ವ್ಯಾಪಕ ಶ್ರೇಣಿಯ ಅನ್ವಯಿಕೆಗಳನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ.
ಸಾಹಿತ್ಯ.
1. Ignatiev N.P. ಅಜೋವ್ 2011 ರ ವಿನ್ಯಾಸದ ಮೂಲಭೂತ ಅಂಶಗಳು.
2. Ignatiev N.P. ಕಾರ್ಯವಿಧಾನಗಳ ವಿನ್ಯಾಸ ಅಜೋವ್ 2015.
ಲೇಖಕರ ಕೆಲಸದ ಸಂಬಂಧಿತ ವಿಭಾಗಗಳ ಮಾಹಿತಿಯನ್ನು ಆಧರಿಸಿ ಲೇಖನವನ್ನು ಬರೆಯಲಾಗಿದೆ "ವಿನ್ಯಾಸ ಮೂಲಭೂತ" 2011 ರಲ್ಲಿ ಪ್ರಕಟವಾದ ಮತ್ತು ಲೇಖಕರ ಕೆಲಸ "ಯಾಂತ್ರಿಕ ವಿನ್ಯಾಸ", 2015 ರಲ್ಲಿ ಪ್ರಕಟಿಸಲಾಗಿದೆ.
ಉಲ್ಲೇಖ ಮತ್ತು ಕ್ರಮಶಾಸ್ತ್ರೀಯ ಕೈಪಿಡಿಯಲ್ಲಿ "ಯಾಂತ್ರಿಕ ವಿನ್ಯಾಸ"ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳ ವಿನ್ಯಾಸದ ಉದಾಹರಣೆಗಳ ಜೊತೆಗೆ, ಇದು ಒಳಗೊಂಡಿದೆ:
- ಕ್ಯಾಮ್ ಕಾರ್ಯವಿಧಾನಗಳು, ಮಧ್ಯಂತರ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಸಂಯೋಜಿತ ಕಾರ್ಯವಿಧಾನಗಳ ಬಳಕೆಗೆ ವಿನ್ಯಾಸ ಉದಾಹರಣೆಗಳು ಮತ್ತು ಶಿಫಾರಸುಗಳು,
- ಮೇಲಿನ ಕಾರ್ಯವಿಧಾನಗಳ ಮುಖ್ಯ ಪ್ರಕಾರದ ಭಾಗಗಳ ಬಳಕೆಗೆ ವಿನ್ಯಾಸ ಮತ್ತು ಶಿಫಾರಸುಗಳ ಉದಾಹರಣೆಗಳು: ಕ್ರ್ಯಾಂಕ್ಶಾಫ್ಟ್ಗಳು, ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳು, ಸ್ಲೈಡರ್ಗಳು, ಲಿವರ್ಗಳು ಮತ್ತು ರಾಕರ್ ಆರ್ಮ್ಸ್, ಕ್ಯಾಮ್ಗಳು ಮತ್ತು ಅವುಗಳ ಹಿಂಜ್ ಕೀಲುಗಳು,
- ಯಾಂತ್ರಿಕ ಡ್ರೈವ್ ಪ್ರಕಾರವನ್ನು ಆಯ್ಕೆ ಮಾಡಲು ಶಿಫಾರಸುಗಳು ಮತ್ತು ಅದರ ಅನುಷ್ಠಾನದ ಉದಾಹರಣೆಗಳು,
- ಕಾರ್ಯವಿಧಾನಗಳ ಲೆಕ್ಕಾಚಾರ,
- ಕ್ಯಾಮ್ ಯಂತ್ರದ ಕಾರ್ಯಾಚರಣೆಯ ಸೈಕ್ಲೋಗ್ರಾಮ್ ಅನ್ನು ನಿರ್ಮಿಸುವ ಉದಾಹರಣೆ,
- ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವ ವಿಧಾನ,
- ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಅವುಗಳ ವಿಶಿಷ್ಟ ಭಾಗಗಳಿಗೆ ನಿಖರತೆಯ ಅವಶ್ಯಕತೆಗಳನ್ನು ನಿಯೋಜಿಸಲು ಶಿಫಾರಸುಗಳು,
- ಸಂಕೀರ್ಣ ಮೂಲ ಕಾರ್ಯವಿಧಾನವನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವ ಉದಾಹರಣೆ
ಲೇಖನದ ಪೂರ್ಣ ಆವೃತ್ತಿಯನ್ನು ಖರೀದಿಸಲು, ಅದನ್ನು ನಿಮ್ಮ ಕಾರ್ಟ್ಗೆ ಸೇರಿಸಿ,
ಲೇಖನದ ಪೂರ್ಣ ಆವೃತ್ತಿಯ ವೆಚ್ಚ 80 ರೂಬಲ್ಸ್ಗಳು.
ಆಧುನಿಕ ಮೆಕ್ಯಾನಿಕಲ್ ಇಂಜಿನಿಯರಿಂಗ್ನಲ್ಲಿ ಕಡಿಮೆ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳನ್ನು ಹೊಂದಿರುವ ಲಿವರ್ ಕಾರ್ಯವಿಧಾನಗಳು ವ್ಯಾಪಕವಾಗಿ ಹರಡಿವೆ. ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳ ಅನುಕೂಲಗಳು ಸೇರಿವೆ: ಹೆಚ್ಚಿನ ಉತ್ಪಾದನೆ, ಚಲನಶಾಸ್ತ್ರದ ಸಂಪರ್ಕಗಳಲ್ಲಿ ರೋಲಿಂಗ್ ಬೇರಿಂಗ್ಗಳನ್ನು ಬಳಸುವ ಸಾಧ್ಯತೆ, ಸಂಪರ್ಕಿಸುವ ಮೇಲ್ಮೈಗಳ ಕಡಿಮೆ ಉಡುಗೆಗಳೊಂದಿಗೆ ದೊಡ್ಡ ಶಕ್ತಿಗಳನ್ನು ರವಾನಿಸುವ ಸಾಮರ್ಥ್ಯ, ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ವಿಶ್ವಾಸಾರ್ಹತೆ ಮತ್ತು ಬಾಳಿಕೆ. ಈ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಕ್ಯಾಮ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗಿಂತ ಭಿನ್ನವಾಗಿ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ನಿರಂತರ ಮುಚ್ಚುವಿಕೆಯನ್ನು ಖಾತ್ರಿಪಡಿಸುವ ಸಾಧನಗಳ ಅಗತ್ಯವಿರುವುದಿಲ್ಲ.
ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯ ಅವಶ್ಯಕತೆಗಳನ್ನು ಪೂರೈಸಲು ಪರಿಸ್ಥಿತಿಗಳಿಂದ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ರಚಿಸಲಾಗಿದೆ. ಯಾಂತ್ರಿಕ ವಿನ್ಯಾಸವು ಒಂದು ಸಂಕೀರ್ಣ ಕಾರ್ಯವಾಗಿದೆ, ಅದರ ಪರಿಹಾರವನ್ನು ಎರಡು ಹಂತಗಳಾಗಿ ವಿಂಗಡಿಸಬಹುದು. ಮೊದಲ ಹಂತಕಾರ್ಯವಿಧಾನಗಳ ಸಂಶ್ಲೇಷಣೆಯು ಔಟ್ಪುಟ್ ಲಿಂಕ್ನ ಚಲನೆಯ ಅಗತ್ಯವಿರುವ ಪ್ರಕಾರ ಮತ್ತು ನಿಯಮವನ್ನು ಮತ್ತು ಕಾರ್ಯವಿಧಾನಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಸಾಮಾನ್ಯ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಒದಗಿಸುವ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರವನ್ನು ಆಯ್ಕೆಮಾಡುವಲ್ಲಿ ಒಳಗೊಂಡಿದೆ. ರಲ್ಲಿ ಎರಡನೇ ಹಂತಯಾಂತ್ರಿಕತೆಯ ಶಕ್ತಿ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಲಿಂಕ್ಗಳು ಮತ್ತು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳ ರಚನಾತ್ಮಕ ರೂಪಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾಗುತ್ತಿದೆ. ನಮ್ಮ ಕೋರ್ಸ್ ಮಾತ್ರ ಒಳಗೊಂಡಿದೆ ಮೊದಲ ಹಂತದಸಂಶ್ಲೇಷಣೆ.
ನಿರ್ದಿಷ್ಟ ಷರತ್ತುಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಅನುಭವದ ಆಧಾರದ ಮೇಲೆ ಯಾಂತ್ರಿಕ ವಿನ್ಯಾಸವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ. ನಂತರ ನಿರ್ಧರಿಸಿ ಸಂಶ್ಲೇಷಣೆಯ ನಿಯತಾಂಕಗಳು, ಅಂದರೆ ಲಿಂಕ್ಗಳ ಉದ್ದಗಳು ಮತ್ತು ಅಗತ್ಯವಿರುವ ಪಥಗಳನ್ನು ಒದಗಿಸುವ ಬಿಂದುಗಳ ನಿರ್ದೇಶಾಂಕಗಳು ಇತ್ಯಾದಿ, ಹಾಗೆಯೇ ಹೆಚ್ಚುವರಿ ಸಂಶ್ಲೇಷಣೆಯ ಪರಿಸ್ಥಿತಿಗಳು.
ಹೆಚ್ಚುವರಿ ಸಂಶ್ಲೇಷಣೆಯ ಪರಿಸ್ಥಿತಿಗಳು ಸೇರಿವೆ ಕ್ರ್ಯಾಂಕ್ ಅಸ್ತಿತ್ವದ ಸ್ಥಿತಿ, ಮತ್ತು ಬಲ ವರ್ಗಾವಣೆಯ ಸ್ಥಿತಿ.
ಬಲ ವರ್ಗಾವಣೆ ಸ್ಥಿತಿ
ಯಂತ್ರಗಳಲ್ಲಿನ ಬಲ ಪ್ರಸರಣದ ಗುಣಮಟ್ಟವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಒತ್ತಡದ ಕೋನ λ ನಿಂದ ನಿರೂಪಿಸಲಾಗುತ್ತದೆ, ಲಿಂಕ್ಗಳು ಮತ್ತು ಜಡತ್ವ ಬಲಗಳ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳದೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಒತ್ತಡದ ಕೋನ λ ಆಗಿದೆ ಪಕ್ಕದ ಚಲಿಸುವ ಲಿಂಕ್ನ ಬದಿಯಿಂದ ಚಾಲಿತ ಲಿಂಕ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ವೆಕ್ಟರ್ ಮತ್ತು ಈ ಬಲದ ಅನ್ವಯದ ಬಿಂದುವಿನ ಸಂಪೂರ್ಣ ವೇಗದ ವೆಕ್ಟರ್ ನಡುವಿನ ತೀವ್ರ ಕೋನ.
ಚಲನೆಯ ಪ್ರಸರಣ ಕೋನ γ ಒತ್ತಡದ ಕೋನವನ್ನು 90 ° ವರೆಗೆ ಪೂರೈಸುತ್ತದೆ:
γ = 90° - λ .
ಮೆಟ್ರಿಕ್ ಸಂಶ್ಲೇಷಣೆಯ ಹಂತದಲ್ಲಿ, ಒತ್ತಡದ ಗರಿಷ್ಠ ಅನುಮತಿಸುವ ಕೋನಗಳು [λ ಗರಿಷ್ಠ] ಮತ್ತು ಚಲನೆಯ ಪ್ರಸರಣ [γ ನಿಮಿಷ] ಸೀಮಿತವಾಗಿದೆ, ನಿಯಮದಂತೆ, ಅವುಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ:
ಸ್ಲೈಡಿಂಗ್ ಚಾಲಿತ ಲಿಂಕ್ಗಾಗಿ [λ ಗರಿಷ್ಠ ] ≤ 30° ಮತ್ತು [γ ನಿಮಿಷ ] ≥ 60°, ಮತ್ತು
[λ ಗರಿಷ್ಠ ] ≤ 40°...45° ಮತ್ತು [γ ನಿಮಿಷ ] ≥ 50°...45° – ತಿರುಗುವ ಚಾಲಿತ ಲಿಂಕ್ಗಾಗಿ.
ಚಾಲನಾ ಶಕ್ತಿಯ ಕ್ಷಣಗಳ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ಸಮತೋಲನದಲ್ಲಿರುವ ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ಸಂಪರ್ಕದಲ್ಲಿ ಪಡೆಗಳ ವರ್ಗಾವಣೆಯ ಸ್ಥಿತಿಯನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ. ಎಂಡಿ ಮತ್ತು ಪ್ರತಿರೋಧದ ಕ್ಷಣ ಎಂಸಿ (ಚಿತ್ರ 3.1). ಒತ್ತಡದ ಕೋನ λ ಉಪಯುಕ್ತ ಪ್ರತಿರೋಧ ಶಕ್ತಿಯ ನಡುವಿನ ಸಂಬಂಧವನ್ನು ನಿರೂಪಿಸುತ್ತದೆ ಎಫ್ 23 cos λ ಪ್ರತಿರೋಧದ ಕ್ಷಣವನ್ನು ಮೀರಿಸುತ್ತದೆ ಎಂಜೊತೆ, ಮತ್ತು ಬಲ ಎಫ್ 23, ಸಮಾನ
ಎಫ್ 23 = ಎಂಇದರೊಂದಿಗೆ /( ಎಲ್ ಸೂರ್ಯ∙ cos λ).
Fig.3.1. ಒತ್ತಡದ ಕೋನ λ ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ಲಿಂಕ್ನಲ್ಲಿ
ಒತ್ತಡದ ಕೋನವು ಹೆಚ್ಚಾದಂತೆ, ಹೆಚ್ಚಿನ ಬಲವನ್ನು ಅನ್ವಯಿಸಬೇಕು ಎಫ್ 23 ಪ್ರತಿರೋಧದ ಅದೇ ಕ್ಷಣವನ್ನು ಜಯಿಸಲು. ಇದು ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಗಳಲ್ಲಿ ಪ್ರತಿಕ್ರಿಯೆಗಳ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯ ದಕ್ಷತೆಯ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ.
ಕಾರ್ಯವಿಧಾನವು ಚಲಿಸುವಾಗ, ಒತ್ತಡದ ಕೋನವು ಬದಲಾಗುತ್ತದೆ. ನಾಲ್ಕು-ಬಾರ್ ಹಿಂಜ್ನಲ್ಲಿರುವ ಈ ಕೋನವು ಕ್ರ್ಯಾಂಕ್ ಇರುವ ಸ್ಥಾನಗಳಲ್ಲಿ ತೀವ್ರ ಮೌಲ್ಯಗಳನ್ನು ತಲುಪುತ್ತದೆ OAಸ್ಟ್ಯಾಂಡ್ನೊಂದಿಗೆ ಅದೇ ನೇರ ಸಾಲಿನಲ್ಲಿ ಇದೆ OS(ಚಿತ್ರ 3.2).
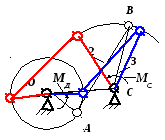
Fig.3.2. ಒತ್ತಡದ ಕೋನಗಳು ತಲುಪುವ ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಾನಗಳು
ವಿಪರೀತ ಮೌಲ್ಯಗಳು
ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಕಾರ್ಯವಿಧಾನದಲ್ಲಿ, ಒತ್ತಡದ ಕೋನವು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ಸ್ಥಾನಗಳಲ್ಲಿ ತೀವ್ರ ಮೌಲ್ಯಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ. 3.3 ಯಾವಾಗ ಕ್ರ್ಯಾಂಕ್ OAಸ್ಲೈಡರ್ನ ಪಥಕ್ಕೆ ಲಂಬವಾಗಿ IN.

ಅಕ್ಕಿ. 3.3. ಒತ್ತಡದ ಕೋನಗಳ ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಾನಗಳು
ವಿಪರೀತ ಮೌಲ್ಯಗಳನ್ನು ಹೊಂದಿವೆ.
ಕೋರ್ಸ್ ಯೋಜನೆಗಳಲ್ಲಿ ಕಾರ್ಯವಿಧಾನಗಳ ಚಲನಶಾಸ್ತ್ರದ ಸಂಶ್ಲೇಷಣೆಯ ಸಾಮಾನ್ಯ ಸಮಸ್ಯೆಗಳನ್ನು ನಾವು ಕೆಳಗೆ ಪರಿಗಣಿಸುತ್ತೇವೆ.
ಸರಾಸರಿ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯ ಗುಣಾಂಕ ಮತ್ತು ರಾಕರ್ ತೋಳಿನ ಎರಡು ತೀವ್ರ ಸ್ಥಾನಗಳ ಆಧಾರದ ಮೇಲೆ ನಾಲ್ಕು-ಬಾರ್ ಸ್ಪಷ್ಟವಾದ ಸಂಪರ್ಕದ ಸಂಶ್ಲೇಷಣೆ
ಗುಣಾಂಕ ಕೆಚಾಲಿತ ಲಿಂಕ್ನ ಸರಾಸರಿ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಸಮಾನವಾಗಿರುತ್ತದೆ ಕೆ = ವಿ ಸಿ 2 – 1 / ವಿ ಸಿ 1 – 2 ,
ಎಲ್ಲಿ ವಿ ಸಿ 1 – 2 − ಒಂದು ಬಿಂದುವಿನ ಸರಾಸರಿ ರೇಖೀಯ ವೇಗ ಜೊತೆಗೆ(ಚಿತ್ರ 3.4) ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ ಸಮಯದಲ್ಲಿ, ವಿ ಸಿ 2 – 1 − ರಿವರ್ಸ್ ಸ್ಟ್ರೋಕ್ಗೆ ಅದೇ.
ಒಪ್ಪಿಕೊಳ್ಳೋಣ ಕೆ> 1, ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ, ನಿಯಮದಂತೆ, ಆರಂಭಿಕ ಸ್ಥಾನಕ್ಕೆ ಮರಳುವ ಸಮಯವನ್ನು ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ ಸಮಯಕ್ಕಿಂತ ಕಡಿಮೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ ಕೆ > 1.
ಅದನ್ನು ಸಾಬೀತುಪಡಿಸುವುದು ಕಷ್ಟವೇನಲ್ಲ ಕೆ= (180° + θ) /(180° – θ).
ಎಲ್ಲಿ θ = 180° ( ಕೆ −1) /(ಕೆ +1),
ಅಲ್ಲಿ q − ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಸ್ಥಾನಗಳ ನಡುವಿನ ಕೋನ ಬಿ.ಸಿ.ಕೆಲಸದ ಸ್ಟ್ರೋಕ್ನ ಆರಂಭದಲ್ಲಿ ಮತ್ತು ಕೊನೆಯಲ್ಲಿ.
ನಾವು ಈ ಕೆಳಗಿನ ಸಂಕೇತವನ್ನು ಪರಿಚಯಿಸೋಣ:
ಎಲ್ 1 - ಕ್ರ್ಯಾಂಕ್ ಉದ್ದ ಎಬಿ,(ಚಿತ್ರ 3.4 ನೋಡಿ); ಎಲ್ 2 - ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಉದ್ದ ಸೂರ್ಯ;
ಎಲ್ 3 - ರಾಕರ್ ಉದ್ದ ಸಿಡಿ; ಎಲ್ 4 - ಬೆಂಬಲಗಳ ನಡುವಿನ ಅಂತರ (ಸ್ಟ್ಯಾಂಡ್ ಉದ್ದ ಎಡಿ).

ಅಕ್ಕಿ. 3.4. ನಿಗದಿತ ಕೋನಗಳ ಮೌಲ್ಯಗಳಿಗೆ ಅನುಗುಣವಾದ ಸ್ಥಾನಗಳಲ್ಲಿನ ಕಾರ್ಯವಿಧಾನದ ರೇಖಾಚಿತ್ರ ψ
ಕೋನಗಳು ψ 1 ಮತ್ತು ψ 2, ಹಾಗೆಯೇ ಗುಣಾಂಕವನ್ನು ನೀಡಲಾಗಿದೆ ಕೆ, ರಾಕರ್ ಆರ್ಮ್ನ ಎರಡು ತೀವ್ರ ಸ್ಥಾನಗಳನ್ನು ನಾವು ಚಿತ್ರಿಸೋಣ ಸಿಡಿ(ಚಿತ್ರ 3.5).
ಅಂಕಗಳು ಜೊತೆಗೆ 1 ಮತ್ತು ಜೊತೆಗೆ 2 ಅನ್ನು ನೇರ ರೇಖೆಯೊಂದಿಗೆ ಸಂಪರ್ಕಿಸೋಣ. ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ತೀವ್ರ ಸ್ಥಾನಗಳ ನಡುವಿನ ಕೋನ q ಅನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡೋಣ ಸೂರ್ಯ. ಹಂತದಲ್ಲಿ ಜೊತೆಗೆ 2 ಕೋನವನ್ನು ನಿರ್ಮಿಸಿ γ = 90 ° −
θ, ಮತ್ತು ಬಿಂದುವಿನಿಂದ ಜೊತೆಗೆ 1 ರೇಖೆಗೆ ಲಂಬವಾಗಿ ಕಡಿಮೆ ಮಾಡಿ ಜೊತೆಗೆ 1 ಜೊತೆಗೆ 2 ಬಿಂದುವಿನಿಂದ ಎಳೆದ ರೇಖೆಯೊಂದಿಗೆ ಛೇದಿಸುವವರೆಗೆ ಜೊತೆಗೆ 2 ಮತ್ತು ಕೋನ γ ಅನ್ನು ರೂಪಿಸುತ್ತದೆ. ಈ ರೇಖೆಗಳ ಛೇದನದ ಬಿಂದುವನ್ನು ನಾವು ಸೂಚಿಸೋಣ ಬಗ್ಗೆ. ನಿಸ್ಸಂಶಯವಾಗಿ, ಬಲ ತ್ರಿಕೋನದಲ್ಲಿ ಓಜೊತೆಗೆ 1 ಜೊತೆಗೆ 2 ಮೂಲೆ ಜೊತೆಗೆ 1 OS 2 = θ. ಮೂರು ಅಂಕಗಳಿಂದ O, ಜೊತೆಗೆ 1 ಮತ್ತು ಜೊತೆಗೆ 2 ನಾವು ವೃತ್ತವನ್ನು ವಿವರಿಸುತ್ತೇವೆ. ಬಿಂದುವಿನಲ್ಲಿ ಶೃಂಗದೊಂದಿಗೆ ಕೆತ್ತಲಾದ ಕೋನ ಬಗ್ಗೆಒಂದು ಚಾಪದ ಮೇಲೆ ನಿಂತಿದೆ  ಮತ್ತು θ ಕೋನಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ, ಹಾಗೆಯೇ ಅದೇ ಚಾಪವನ್ನು ಆಧರಿಸಿ ಎಲ್ಲಾ ಕೆತ್ತಲಾದ ಕೋನಗಳು. ಬಿಂದುವಿನಲ್ಲಿ ಕೇಂದ್ರವನ್ನು ಹೊಂದಿರುವ ವೃತ್ತವನ್ನು ನಾವು ಆರಿಸಿಕೊಳ್ಳೋಣ ಬಗ್ಗೆಅನಿಯಂತ್ರಿತ ಬಿಂದು ಎಮತ್ತು ಅಂಕಗಳೊಂದಿಗೆ ನೇರ ಭಾಗಗಳೊಂದಿಗೆ ಅದನ್ನು ಸಂಪರ್ಕಿಸಿ ಜೊತೆಗೆ 1 ಮತ್ತು ಜೊತೆಗೆ 2. ಪರಿಣಾಮವಾಗಿ, ಬಿಂದುವಿನಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ ಬೆಂಬಲವನ್ನು ಇರಿಸುವುದು ಎ, ನಾವು ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ನಾಲ್ಕು-ಬಾರ್ ಯಾಂತ್ರಿಕತೆಯ ರೇಖಾಚಿತ್ರವನ್ನು ಪಡೆಯುತ್ತೇವೆ (ಚಿತ್ರ 3.5 ನೋಡಿ).
ಮತ್ತು θ ಕೋನಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ, ಹಾಗೆಯೇ ಅದೇ ಚಾಪವನ್ನು ಆಧರಿಸಿ ಎಲ್ಲಾ ಕೆತ್ತಲಾದ ಕೋನಗಳು. ಬಿಂದುವಿನಲ್ಲಿ ಕೇಂದ್ರವನ್ನು ಹೊಂದಿರುವ ವೃತ್ತವನ್ನು ನಾವು ಆರಿಸಿಕೊಳ್ಳೋಣ ಬಗ್ಗೆಅನಿಯಂತ್ರಿತ ಬಿಂದು ಎಮತ್ತು ಅಂಕಗಳೊಂದಿಗೆ ನೇರ ಭಾಗಗಳೊಂದಿಗೆ ಅದನ್ನು ಸಂಪರ್ಕಿಸಿ ಜೊತೆಗೆ 1 ಮತ್ತು ಜೊತೆಗೆ 2. ಪರಿಣಾಮವಾಗಿ, ಬಿಂದುವಿನಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ ಬೆಂಬಲವನ್ನು ಇರಿಸುವುದು ಎ, ನಾವು ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ನಾಲ್ಕು-ಬಾರ್ ಯಾಂತ್ರಿಕತೆಯ ರೇಖಾಚಿತ್ರವನ್ನು ಪಡೆಯುತ್ತೇವೆ (ಚಿತ್ರ 3.5 ನೋಡಿ).

ಅಕ್ಕಿ. 3.5 ಗುಣಾಂಕ ಕೆ ಪ್ರಕಾರ ನಾಲ್ಕು-ಬಾರ್ ಹಿಂಜ್ನ ಸಂಶ್ಲೇಷಣೆ
ಸರಾಸರಿ ವೇಗದಲ್ಲಿ ಬದಲಾವಣೆಗಳು ಮತ್ತು ರಾಕರ್ನ ಎರಡು ತೀವ್ರ ಸ್ಥಾನಗಳು
ಚಿತ್ರದಿಂದ ಅದು ಅನುಸರಿಸುತ್ತದೆ ಎಸಿ 1 = IN 1 ಜೊತೆಗೆ 1 -ಎಬಿ 1 = ಎಲ್ 2 − ಎಲ್ 1 ; ಎಸಿ 2 = IN 2 ಜೊತೆಗೆ 2 -ಎಬಿ 2 = ಎಲ್ 2 + ಎಲ್ 1 .
ಎಲ್ಲಿ ಎಲ್ 1 = 0,5 (ಎಸಿ 2 −ಎಸಿ 1) μ ಎಲ್ / 2; ಎಲ್ 2 = ಎಸಿ 2 − ಎಲ್ 1 .
ಸ್ಟ್ಯಾಂಡ್ ಉದ್ದ ಎಡಿ = ಎಲ್ 4 ಅನ್ನು ಬಿಂದುವಿನ ಸ್ಥಾನದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಎ.
ಬಿಂದುವಿನ ಸ್ಥಾನದಿಂದ ಎಅನಿಯಂತ್ರಿತವಾಗಿ ಆಯ್ಕೆ ಮಾಡಲಾಗಿದೆ, ಸಮಸ್ಯೆಗೆ ಬಹುಮುಖ ಪರಿಹಾರವಿದೆ. ಹೆಚ್ಚುವರಿ ಷರತ್ತುಗಳನ್ನು ಪರಿಚಯಿಸಲು ಇದು ನಿಮ್ಮನ್ನು ಅನುಮತಿಸುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಬಲ ವರ್ಗಾವಣೆಯ ಸ್ಥಿತಿ, ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಬೆಂಬಲಗಳ ಸ್ಥಳದ ವಿಕೇಂದ್ರೀಯತೆಯ ಉಪಸ್ಥಿತಿ ಅಥವಾ ಅನುಪಸ್ಥಿತಿ.
ಪ್ರಕಾರ ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯ ಸಂಶ್ಲೇಷಣೆ ಗುಣಾಂಕಕೆ ಬದಲಾವಣೆಗಳನ್ನು
ದೃಶ್ಯಗಳ ಸರಾಸರಿ ವೇಗ
ನೀಡಲಾಗಿದೆ: ಗುಣಾಂಕ ಕೆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಗಳು ಮತ್ತು ಬಿಂದುವಿನ ಎರಡು ತೀವ್ರ ಸ್ಥಾನಗಳು INತೆರೆಮರೆಯ ಸೂರ್ಯ.
ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯನ್ನು ಎರಡು ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ಪರಿಗಣಿಸೋಣ (ಚಿತ್ರ 3.6).

ಅಕ್ಕಿ. 3.6. ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯ ಸಂಶ್ಲೇಷಣೆ
ಕ್ರ್ಯಾಂಕ್ ಸ್ಥಾನದ ನಡುವಿನ ಕೋನ OA 2 ಮತ್ತು ಸ್ಥಾನದಲ್ಲಿ ಕ್ರ್ಯಾಂಕ್ನ ಮುಂದುವರಿಕೆ OA 1 ಸಮನಾಗಿರುತ್ತದೆ θ = 180° ( ಕೆ −1) /(ಕೆ+1). ಕೋನಗಳು IN 1 ಸಿ ಬಿ 2 ಮತ್ತು q ಪರಸ್ಪರ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಪರಸ್ಪರ ಲಂಬವಾಗಿರುವ ಬದಿಗಳನ್ನು ಹೊಂದಿರುವ ಕೋನಗಳಂತೆ.
ನೇರ ಸಾಲಿನಲ್ಲಿ IN 1 IN 2 ಶೃಂಗದಲ್ಲಿ ಕೋನದೊಂದಿಗೆ ಸಮದ್ವಿಬಾಹು ತ್ರಿಕೋನವನ್ನು ನಿರ್ಮಿಸಿ ಜೊತೆಗೆ, ಕೋನ q ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಅನಿಯಂತ್ರಿತ ಹಂತದಲ್ಲಿ q ಕೋನವನ್ನು ಅರ್ಧದಷ್ಟು ಭಾಗಿಸುವ ನೇರ ರೇಖೆಯಲ್ಲಿ, ಒಂದು ಬಿಂದುವನ್ನು ಆಯ್ಕೆಮಾಡಿ ಬಗ್ಗೆ, ಅದರ ಸುತ್ತಲೂ ಕ್ರ್ಯಾಂಕ್ ತಿರುಗುತ್ತದೆ OA. ಬಿಂದುವಿನಿಂದ ಕೈಬಿಡುವುದು ಬಗ್ಗೆರೇಖೆಗೆ ಲಂಬವಾಗಿ IN 1 ಜೊತೆಗೆ(ಅಥವಾ IN 2 ಜೊತೆಗೆ), ಕ್ರ್ಯಾಂಕ್ನ ಉದ್ದವನ್ನು ಕಂಡುಹಿಡಿಯಿರಿ OA. ಪರಿಣಾಮವಾಗಿ ರಾಕರ್ ಕಾರ್ಯವಿಧಾನವು ನಿಗದಿತ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸುತ್ತದೆ. ನೀಡಿರುವ ಷರತ್ತುಗಳ ಪ್ರಕಾರ ರಾಕರ್ ಯಾಂತ್ರಿಕತೆಯ ನಿರ್ಮಾಣವು ಈ ಕೆಳಗಿನಂತೆ ಸಂಭವಿಸುತ್ತದೆ. ಅಂಕಗಳು IN 1 ಮತ್ತು IN 2, ಅದರ ಸ್ಥಾನವನ್ನು ನೀಡಲಾಗಿದೆ, ನಾವು ನೇರ ರೇಖೆಯೊಂದಿಗೆ ಸಂಪರ್ಕಿಸುತ್ತೇವೆ.
ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಯಾಂತ್ರಿಕತೆಯ ಸಂಶ್ಲೇಷಣೆ
ನಾವು ಈ ಕೆಳಗಿನ ಸಂಪ್ರದಾಯಗಳನ್ನು ಒಪ್ಪಿಕೊಳ್ಳೋಣ (ಚಿತ್ರ 3.7):
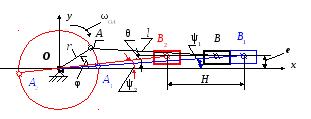
ಅಕ್ಕಿ. 3.7. ಕ್ರ್ಯಾಂಕ್-ಸ್ಲೈಡರ್ ಯಾಂತ್ರಿಕತೆಯ ರೇಖಾಚಿತ್ರ
ಆರ್- ಕ್ರ್ಯಾಂಕ್ ಉದ್ದ OA;ಎನ್- ಸ್ಲೈಡರ್ನ ಸ್ಟ್ರೋಕ್; ಎಲ್- ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಉದ್ದ ಎಬಿ;
ಇ- ನಿರಾಸಕ್ತಿ, ಅಂದರೆ ಪಾಯಿಂಟ್ ಪಥವನ್ನು ಆಫ್ಸೆಟ್ INಅಕ್ಷಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸ್ಲೈಡರ್ ಓಹ್ ;
ಎಲ್ = ಎಲ್/ ಆರ್- ಸಂಪರ್ಕಿಸುವ ರಾಡ್ನ ಸಾಪೇಕ್ಷ ಉದ್ದ;
ν = ಇ/ಆರ್- ಸಾಪೇಕ್ಷ ಅಕ್ಷೀಯ;
ಗಂ = ಎಚ್/ ಆರ್- ಸ್ಲೈಡರ್ನ ಸಂಬಂಧಿತ ಸ್ಟ್ರೋಕ್ ;
λ ಗರಿಷ್ಠ - ಗರಿಷ್ಠ ಒತ್ತಡದ ಕೋನ (ಚಿತ್ರ 3.3 ನೋಡಿ);
ಕೆ − ಸ್ಲೈಡರ್ನ ಸರಾಸರಿ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯ ಗುಣಾಂಕ (§ 3.1 ನೋಡಿ)
ψ 1 ಮತ್ತು ψ 2 - ಕ್ರ್ಯಾಂಕ್ನಿಂದ ರೂಪುಗೊಂಡ ತೀವ್ರ ಕೋನಗಳು OAನಿರ್ದೇಶನದೊಂದಿಗೆ ಓಹ್ಸ್ಲೈಡರ್ನ ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ: φ 1 =  IN 1
ಓಹ್, φ 2 = IN 2
ಓಹ್
;
IN 1
ಓಹ್, φ 2 = IN 2
ಓಹ್
;
θ = ψ 2 - ψ 1 - ಸ್ಲೈಡ್ನ ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳ ನಡುವಿನ ತೀವ್ರ ಕೋನ.
ಕಾರ್ಯ 1. ನೀಡಿದ: ಅಲ್ಲ, ಎಲ್ = ಎಲ್/ ಆರ್.
ಹುಡುಕಿ: ಆರ್; ಎಲ್; λ ಗರಿಷ್ಠ
ಕ್ರ್ಯಾಂಕ್ ಉದ್ದ OA: ಆರ್ = ಎಚ್ / ಗಂ. ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಉದ್ದ ಎಬಿ: ಎಲ್ = ಎಲ್ ಆರ್.
ಒತ್ತಡದ ಕೋನದ ದೊಡ್ಡ ಮೌಲ್ಯ ׀ λ max ׀ = ಆರ್ಕ್ ಸಿನ್ [(1 + ν) / ಎಲ್] .
ಕಾರ್ಯ 2. ನೀಡಿದ: ಎನ್,ಕೆ, ಎಲ್= ಎಲ್/ ಆರ್.
ಹುಡುಕಿ: ಆರ್; l; ಇ; λ ಗರಿಷ್ಠ.
ಸ್ಲೈಡರ್ನ ತೀವ್ರ ಸ್ಥಾನಗಳಲ್ಲಿ ಸಂಪರ್ಕಿಸುವ ರಾಡ್ಗಳ ನಡುವಿನ ತೀವ್ರ ಕೋನ
θ = 180 0 ∙( ಕೆ–1)/(ಕೆ+1).
ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ಸ್ಲೈಡರ್ನ ಸಂಬಂಧಿತ ಸ್ಟ್ರೋಕ್ ಅನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ
ಗಂ = {2∙} 0,5 .
ನಾವು ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ಸಾಪೇಕ್ಷ ಅಸಮರ್ಥತೆಯನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ
ν = [( ಗಂ –2)∙(ಎಲ್ 2 –1)] 0,5 .
ಕ್ರ್ಯಾಂಕ್ ಉದ್ದ ಆರ್ = ಎಚ್/ ಗಂ; ಸಂಪರ್ಕಿಸುವ ರಾಡ್ ಉದ್ದ ಎಲ್ = ಎಲ್ ಆರ್; ನಿರಾಸಕ್ತಿ ಇ =ν ಆರ್.
ಒತ್ತಡದ ಕೋನದ ದೊಡ್ಡ ಮೌಲ್ಯ λ ಗರಿಷ್ಠ = ಆರ್ಕ್ ಸಿನ್ [(1 + ν) / ಎಲ್].