យន្តការលើក- នេះគឺជាយន្តការដែលបង្កើតឡើងដោយតំណភ្ជាប់ដែលធ្វើឡើងក្នុងទម្រង់នៃរចនាសម្ព័ន្ធដងថ្លឹងដែលមានរាងជាដំបង។
យន្តការ Lever គឺរីករាលដាលនៅក្នុងម៉ាស៊ីនស្ទើរតែគ្រប់ប្រភេទ។
២.១. ការចាត់ថ្នាក់នៃយន្តការ LEVER
ភាពខុសគ្នានៃយន្តការដងថ្លឹងត្រូវបានចាត់ថ្នាក់តាមប្រភេទនៃខ្សែសង្វាក់ kinematic និងរចនាសម្ព័ន្ធ។
ដោយផ្អែកលើប្រភេទនៃខ្សែសង្វាក់ kinematic ក្រុមពីរត្រូវបានសម្គាល់។
យន្តការដែលមានខ្សែសង្វាក់ kinematic បិទជិត - ទាំងនេះគឺជាយន្តការដងថ្លឹង -
nisms ដែលមាននៅក្នុងរចនាសម្ព័ន្ធរបស់ពួកគេបានបិទតែ kinematic
ខ្សែសង្វាក់ជិះស្គី (សូមមើលរូប 1.6 រូប 2.1)។
យន្តការដែលមានខ្សែសង្វាក់ kinematic បើកចំហ - ទាំងនេះគឺជាយន្តការដង្កៀប
យន្តការដែលមាននៅក្នុងរចនាសម្ព័ន្ធរបស់វាបើកតែខ្សែសង្វាក់ kinematic (សូមមើលរូប 1.4, គ, រូប 2.7)។
ក្នុងករណីភាគច្រើន យន្តការដងថ្លឹងដែលមានខ្សែសង្វាក់ kinematic បិទគឺជាយន្តការនៃយន្តហោះ ហើយយន្តការ lever ដែលមានខ្សែសង្វាក់ kinematic បើកចំហគឺជាផ្នែកមួយ ។
រចនាសម្ព័ន្ធនៃយន្តការ lever អាចជាបឋម សាមញ្ញ ឬស្មុគស្មាញ។
យន្តការបឋម- ទាំងនេះគឺជាយន្តការដែលរចនាសម្ព័ន្ធមិនអាចបែងចែកទៅជាផ្នែកដែលមានសមត្ថភាពបំប្លែងចលនាដោយឯករាជ្យ
(រូបភាព 2.3) ។
យន្តការសាមញ្ញ- ទាំងនេះគឺជាយន្តការដងថ្លឹង រចនាសម្ព័ន្ធដែលមានយន្តការបឋមមួយ និងក្រុមរចនាសម្ព័ន្ធមួយ។
(រូបភាព 1.6 រូប 2.1) ។
យន្តការស្មុគស្មាញ- ទាំងនេះគឺជាយន្តការដងថ្លឹង រចនាសម្ព័ន្ធដែលមានយន្តការបឋមមួយ ឬច្រើន និងក្រុមរចនាសម្ព័ន្ធពីរ ឬច្រើន។
យន្តការស្មុគ្រស្មាញចែកចេញជា៖
ចូលទៅក្នុងប្រភេទដូចគ្នា - ទាំងនេះគឺជាយន្តការដងថ្លឹងស្មុគ្រស្មាញដែលជារចនាសម្ព័ន្ធដែលមានយន្តការបឋមដូចគ្នានិងក្រុមរចនាសម្ព័ន្ធស្រដៀងគ្នានៃតំណភ្ជាប់;
ពហុប្រភេទ - ទាំងនេះគឺជាយន្តការដងថ្លឹងស្មុគ្រស្មាញ, រចនាសម្ព័ន្ធដែលមានយន្តការបឋមផ្សេងគ្នានិងក្រុមរចនាសម្ព័ន្ធផ្សេងគ្នានៃតំណភ្ជាប់;
រួមបញ្ចូលគ្នា- ទាំងនេះគឺជាយន្តការដងថ្លឹងស្មុគ្រស្មាញ រចនាសម្ព័ន្ធដែលត្រូវបានបង្កើតឡើងជាលទ្ធផលនៃការរួមបញ្ចូលគ្នានៃយន្តការស្រដៀងគ្នា និងច្រើនប្រភេទ។
យន្តការដងថ្លឹងសាមញ្ញទាំងអស់គឺជាយន្តការសំប៉ែត ដែលនៅក្នុងវេនត្រូវបានបែងចែកទៅជាគ្រោងការណ៍ធម្មតាជាមូលដ្ឋាន៖
យន្តការ hinge (សូមមើលរូប 1.6, ខ);
2. LEVER GEARS
2.1.
យន្តការ crank-slider (សូមមើលរូប 1.6, a); យន្តការរ៉ុក (រូបភាព 2.1, ក); យន្តការ tangential (រូបភាព 2.1, ខ); យន្តការ sinus (រូបភាព 2.1, គ) ។
តំណភ្ជាប់ផ្លាស់ទីនៃយន្តការ lever រាបស្មើអាចអនុវត្តបានទាំងប្រភេទចលនាសាមញ្ញបំផុត (បង្វិល និងការបកប្រែ) និងចលនាស្មុគស្មាញ។
អង្ករ។ ២.១. ប្លុកដ្យាក្រាមនៃយន្តការដងថ្លឹងធម្មតា។
តំណភ្ជាប់ដែលអនុវត្តចលនាបង្វិលរួមមាន crank, rocker arm, rocker និង swing slider ។
crank គឺជាតំណភ្ជាប់នៃយន្តការ lever ដែលជាផ្នែកមួយនៃគូ kinematic បង្វិលប៉ុណ្ណោះ ហើយមានសមត្ថភាពបង្វិលជុំវិញអ័ក្សរង្វិលនៅមុំលើសពី 360° (សូមមើលរូប 1.6 រូប 2.1 តំណភ្ជាប់ 1)។ .
ដៃ rocker គឺជាតំណភ្ជាប់នៃយន្តការ lever ដែលជាផ្នែកមួយនៃគូ kinematic បង្វិលប៉ុណ្ណោះ ហើយមានសមត្ថភាពបង្វិលជុំវិញអ័ក្សនៃការបង្វិលនៅមុំតិចជាង 360° (សូមមើលរូប 1.6, link 4)។
តំណភ្ជាប់គឺជាតំណភ្ជាប់នៃយន្តការ lever ដែលជាផ្នែកមួយនៃគូ kinematic បង្វិល និងបកប្រែ ហើយមានសមត្ថភាពបង្វិលជុំវិញអ័ក្សនៃការបង្វិលនៅមុំតិចជាង 360° (រូបភាព 2.1 តំណ 5) ។
រំកិលរំកិល- នេះគឺជាតំណភ្ជាប់នៃយន្តការ lever បង្កើតជាគូ kinematic បកប្រែជាមួយនឹងដំបង និងគូ kinematic បង្វិលជាមួយឈរមួយ។
តំណភ្ជាប់ដែលបានបង្ហាញទាំងអស់មានអន្តរកម្មជាមួយ rack ។ ក្នុងករណីនេះ crank ក្នុងករណីភាគច្រើនគឺជាតំណភ្ជាប់ដំបូងកំណត់ឬនាំមុខ។
តំណភ្ជាប់ដែលអនុវត្តចលនាបកប្រែរួមមាន គ្រាប់រំកិល ថ្ម និងដំបង។
គ្រាប់រំកិលគឺជាតំណភ្ជាប់ដែលបង្កើតជាគូ kinematic បកប្រែជាមួយនឹងកន្លែងឈរ (សូមមើលរូប 1.6, តំណ 3) ។
ថ្មគឺជាតំណភ្ជាប់ដែលបង្កើតជាគូ kinematic បកប្រែជាមួយស្លាយ (រូបភាព 2.1, តំណ 6) ។
ដំបងគឺជាតំណភ្ជាប់ដែលបង្កើតជាគូ kinematic បកប្រែជាមួយនឹងគ្រាប់រំកិលឬស្ថានី (រូបភាព 2.1, តំណ 7) ។
កំណាត់តភ្ជាប់គឺជាតំណភ្ជាប់ដែលធ្វើចលនាស្មុគស្មាញ។
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |

2. LEVER GEARS
2.1. ចំណាត់ថ្នាក់នៃយន្តការដងថ្លឹង
ដំបងតភ្ជាប់គឺជាតំណភ្ជាប់នៅក្នុងយន្តការ lever ដែលបង្កើតជាគូ kinematic តែជាមួយតំណភ្ជាប់ផ្លាស់ទីដែលមិនមានទំនាក់ទំនងជាមួយ rack
(សូមមើលរូប 1.6, តំណ 2)។
២.២. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការ LEVER
នៅពេលសិក្សារចនាសម្ព័ន្ធនៃយន្តការ lever ណាមួយ ទិសដៅពីរត្រូវបានសម្គាល់: ការវិភាគរចនាសម្ព័ន្ធ និងការសំយោគរចនាសម្ព័ន្ធ។
ការវិភាគរចនាសម្ព័ន្ធគឺជាដំណើរការនៃការសិក្សារចនាសម្ព័ន្ធនៃយន្តការ ពោលគឺកំណត់ចំនួនតំណភ្ជាប់ និងប្រភេទនៃចលនាដែលពួកគេអនុវត្ត ចំនួន និងប្រភេទនៃគូ kinematic ក្រុមរចនាសម្ព័ន្ធ និងខ្សែសង្វាក់ kinematic ចំនួននៃការចល័ត និងវត្តមាននៃពិការភាព។
ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការត្រូវបានអនុវត្តដើម្បីកំណត់អត្តសញ្ញាណពិការភាពនៅក្នុងរចនាសម្ព័ន្ធរបស់ពួកគេដែលត្រូវបានលុបចោលប្រសិនបើចាំបាច់។
ជាឧទាហរណ៍នៃការលុបបំបាត់ (ការលុបបំបាត់) ពិការភាពរចនាសម្ព័ន្ធ សូមពិចារណាយន្តការដងថ្លឹងដែលមានរចនាសម្ព័ន្ធមិនសមហេតុផល (សូមមើលរូប 1.12, ក)។ យន្តការនេះនៅតែដំណើរការបានលុះត្រាតែប្រវែងនៃតំណភ្ជាប់ស្ថិតក្នុងសមាមាត្រដូចខាងក្រោម៖
yakh: l OA = l BC,l AB = l DE = l OC និងl OD = l EC ។ អាស្រ័យហេតុនេះ ចំនុចនៃយន្តការបង្កើតជាតួរលេខ OABC ដែលតែងតែជាប្រលេឡូក្រាម។ បន្ទាប់មកដោយគ្មានការផ្លាស់ប្តូរចលនានៃតំណភ្ជាប់យន្តការ អ្នកអាចដកដំបងតភ្ជាប់ 2 ចេញ ចាប់តាំងពីតំណភ្ជាប់នេះបង្កើតជាគូ kinematic ជាមួយតំណភ្ជាប់ទី 1 និងទី 4 ជាមួយនឹងចំណុចកណ្តាល hinge នៅចំណុច D និង E ដាក់លក្ខខណ្ឌនៃការតភ្ជាប់នៅលើតំណភ្ជាប់ទាំងនេះដែលមិនប៉ះពាល់ដល់ ធម្មជាតិនៃចលនារបស់ពួកគេ។ ក្នុងករណីនេះ លក្ខខណ្ឌនៃការតភ្ជាប់ដែលកំណត់ដោយការតភ្ជាប់ដំបង 2 នៅលើតំណភ្ជាប់ទី 1 និងទី 4 គឺអកម្ម ឬមិនអាចប្រើឡើងវិញបាន។ នៅក្នុងវេន ការចល័តនៃគូ kinematic ជាមួយនឹងចំណុចកណ្តាលនៃ hinge នៅចំណុច D និង E គឺជាឧទាហរណ៍នៃការចល័តក្នុងតំបន់ចាប់តាំងពីអវត្តមានរបស់ពួកគេ ការចល័តនៃតំណភ្ជាប់ដែលនៅសល់នៃយន្តការនឹងមិនផ្លាស់ប្តូរទេ។ ស្ថានភាពស្រដៀងគ្នានឹងកើតឡើងប្រសិនបើដំបងតភ្ជាប់ 3 ត្រូវបានដកចេញពីរចនាសម្ព័ន្ធនៃយន្តការជំនួសឱ្យដំបងតភ្ជាប់ 2 ។
ដើម្បីលុបបំបាត់ពិការភាពនៃរចនាសម្ព័ន្ធវាចាំបាច់ដើម្បីដឹងច្បាស់អំពីវត្តមាននៃការភ្ជាប់ឡើងវិញឬអកម្មនៅក្នុងសៀគ្វីយន្តការនិងលេខរបស់វា។ ដើម្បីគណនាចំនួននៃការតភ្ជាប់ដែលលើស ឬអកម្ម ទំនាក់ទំនងខាងក្រោមត្រូវបានប្រើ៖
q = W o + W m + W,
ដែល W o , W m , W – បានផ្តល់ឱ្យ ភាពចល័តក្នុងតំបន់ និងគណនា។
ការតភ្ជាប់ដែលលែងត្រូវការតទៅទៀត ឬអកម្មគឺអាចប្រើបានតែនៅក្នុងខ្សែសង្វាក់ kinematic បិទជាមួយនឹងសៀគ្វីជាច្រើនប៉ុណ្ណោះ។ មានសៀគ្វីពីរប្រភេទនៅក្នុងយន្តការ: អាស្រ័យនិងឯករាជ្យ។ សៀគ្វីមួយគឺឯករាជ្យប្រសិនបើវាខុសគ្នាពីសៀគ្វីផ្សេងទៀតដោយតំណភ្ជាប់យ៉ាងហោចណាស់មួយ។ សៀគ្វីអាស្រ័យស្ទួនគ្នាទៅវិញទៅមក ហើយតំណភ្ជាប់ដែលបង្កើតពួកវាបង្កើតការតភ្ជាប់ដែលមិនចាំបាច់ ឬអកម្ម។ ដូច្នេះរចនាសម្ព័ន្ធនៃយន្តការដែលបានបង្ហាញនៅក្នុងរូបភព។ 1.12 មានសៀគ្វីជាច្រើន - OABC និង ODEC ។ វណ្ឌវង្កគឺអាស្រ័យ ព្រោះវាត្រូវបានបង្កើតឡើងដោយបរិមាណដូចគ្នា។
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.2.
និង ប្រភេទនៃតំណភ្ជាប់។ ក្នុងពេលជាមួយគ្នានេះ ពីមុនយើងបានរកឃើញថារចនាសម្ព័ន្ធនៃយន្តការនេះមានពិការភាព ពោលគឺវាមានការតភ្ជាប់ដែលមិនអាចខ្វះបាន ឬអកម្ម ការភ្ជាប់ និងការចល័តក្នុងតំបន់ ដែលបញ្ជាក់ពីវត្តមាននៃសៀគ្វីអាស្រ័យ។ ដូច្នេះដើម្បីកំណត់ចំនួនសៀគ្វីដែលពឹងផ្អែកវាចាំបាច់ត្រូវដឹងពីចំនួនសរុបនៃសៀគ្វីនៃយន្តការ។ ចំនួនសៀគ្វីត្រូវបានកំណត់ដោយប្រើកន្សោម
K = p−n,
ដែល p គឺជាចំនួនគូ kinematic នៅក្នុងរចនាសម្ព័ន្ធនៃយន្តការ n គឺជាចំនួននៃតំណភ្ជាប់ផ្លាស់ទីនៃយន្តការ។
n = k−1,
នៅទីនេះ k គឺជាចំនួនសរុបនៃតំណភ្ជាប់យន្តការ រួមទាំងជំហរ។
បន្ទាប់ពីការលុបបំបាត់ពិការភាពនៃរចនាសម្ព័ន្ធចំនួនក្រុមរចនាសម្ព័ន្ធចំនួននិងប្រភេទនៃគូ kinematic ចំនួននៃការចល័តសំខាន់ត្រូវបានកំណត់ហើយបន្ទាប់មកចាប់ផ្តើមពីតំណភ្ជាប់លទ្ធផលក្រុមនៃតំណភ្ជាប់ត្រូវបានបំបែកចេញពីសមាសភាពនៃយន្តការដែលរួមគ្នា។ មានភាពចល័តស្មើនឹងសូន្យ។ ក្នុងករណីនេះវាចាំបាច់ដើម្បីធានាថាតំណភ្ជាប់ដែលនៅសេសសល់នៅក្នុងយន្តការមិនបាត់បង់ការតភ្ជាប់ជាមួយនឹងតំណភ្ជាប់នាំមុខ។
ជាទូទៅការវិភាគរចនាសម្ព័ន្ធនៃយន្តការ lever ចុះមកដើម្បីដោះស្រាយបញ្ហាដូចខាងក្រោម:
សម្រាប់យន្តការលំហ៖
2) កំណត់ភាពបត់បែននៃយន្តការ។
សម្រាប់យន្តការរាបស្មើ៖
1) ការកំណត់ភាពចល័តនៃយន្តការ;
2) ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការ។
ដោយបានពិនិត្យមើលបញ្ហាដែលបានបង្ហាញនៃការវិភាគរចនាសម្ព័ន្ធយើងអាចកត់សម្គាល់ពីភាពស្រដៀងគ្នានៃបញ្ហាទីមួយសម្រាប់ប្រភេទនៃយន្តការ lever ទាំងពីរប្រភេទ។ ក្នុងពេលជាមួយគ្នានេះភារកិច្ចទីពីរទោះបីជាមានភាពខុសគ្នាខ្លះនៅក្នុងការបង្កើតក៏ដោយក៏បន្តគោលដៅដូចគ្នា - កំណត់អត្តសញ្ញាណវត្តមាននៃពិការភាពរចនាសម្ព័ន្ធ។
ភាពចល័តនៃយន្តការ
ភាពចល័តនៃយន្តការ- នេះគឺជាចំនួននៃកូអរដោណេទូទៅឯករាជ្យដែលកំណត់ទីតាំងនៃតំណភ្ជាប់យន្តការនៅលើយន្តហោះ ឬក្នុងលំហនៅពេលពិចារណាក្នុងពេលវេលា។
រូបមន្តរចនាសម្ព័ន្ធសម្រាប់កំណត់ការចល័តនៃយន្តការលំហត្រូវបានទទួលដោយ P. I. Somov និងសម្រាប់យន្តការផ្ទះល្វែង - ដោយ P. L. Chebyshev ។ រូបមន្តរចនាសម្ព័ន្ធទាំងពីរគឺផ្អែកលើគោលការណ៍ដូចគ្នានៃការសាងសង់របស់ពួកគេ ដូច្នេះក្នុងទម្រង់ទូទៅ រូបមន្តរចនាសម្ព័ន្ធអាចត្រូវបានតំណាងថាជា
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.2. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង
W = H n + ∑ (H− i) pi ,
i = 1n
ដែល H គឺជាចំនួនដឺក្រេនៃការចល័ត (សម្រាប់យន្តការលំហ H = 6 សម្រាប់យន្តការផ្ទះល្វែង H = 3 p i គឺជាចំនួននៃគូ kinematic នៃការចល័ត;
ខ្ញុំគឺជាចំនួននៃការចល័តនៃគូ kinematic ។ រូបមន្តរចនាសម្ព័ន្ធមានទម្រង់សរសេរពីរយ៉ាង៖ ១) ក្នុងថ្នាក់នៃគូ kinematic៖
សម្រាប់យន្តការផ្ទះល្វែង រូបមន្តរបស់ P. L. Chebyshev:
W = 3 n− 2 p5 − p4 ,
W =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1 ,
ដែល p 5 , ទំ 4 , ទំ 3 , ទំ 2 , ទំ 1 - ចំនួននៃគូ kinematic រៀងគ្នានៃថ្នាក់ទី 5 ទី 4 ទី 3 ទីពីរនិងថ្នាក់ទី 1 ។
2) នៅក្នុងដឺក្រេនៃការចល័តនៃគូ kinematic: សម្រាប់យន្តការផ្ទះល្វែងរូបមន្ត P. L. Chebyshev:
W = 3 n− 2 p1 − p2 ,
សម្រាប់យន្តការលំហ រូបមន្តរបស់ P. I. Somov៖
W =6 n −5 p 1 −4 p 2 −3 p 3 −2 p 4 −p 5 ,
នៅទីនេះ ទំ 1 , ទំ 2 , ទំ 3 , ទំ 4 , ទំ 5 – ចំនួននៃគូ kinematic ដែលមានមួយ, ពីរ, បី, បួន និងប្រាំ រៀងគ្នា។
សមាសភាពនៃរចនាសម្ព័ន្ធនៃយន្តការ lever
ដើម្បីដោះស្រាយបញ្ហានៃការវិភាគ និងការសំយោគនៃយន្តការ lever សាស្រ្តាចារ្យ L.V Assur បានស្នើឱ្យមានការចាត់ថ្នាក់រចនាសម្ព័ន្ធដើម ដោយយោងទៅតាមយន្តការណាដែលមិនមានការតភ្ជាប់ដដែលៗ និងការចល័តក្នុងតំបន់មានយន្តការបឋម (បឋមសិក្សា) និងក្រុមរចនាសម្ព័ន្ធនៃតំណភ្ជាប់ (រូបភាព 2.2 ។ )
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |

2. LEVER GEARS
2.2. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង
ការសំយោគរចនាសម្ព័ន្ធ
យន្តការ = PM+...+ PM+ SGZ+...+ SGZ
ការវិភាគរចនាសម្ព័ន្ធ
អង្ករ។ ២.២. សមាសភាពនៃរចនាសម្ព័ន្ធយន្តការយោងទៅតាម Assur
យន្តការបឋម(PM) គឺជាយន្តការបឋមមួយដែលមានតំណភ្ជាប់ដែលអាចចល័តបាន និងថេរ ដែលបង្កើតជាគូ kinematic ជាមួយនឹងការចល័តមួយ ឬច្រើន (រូបភាព 2.3) ។
យន្តការបឋម | ||||||
ជាមួយនឹងភាពចល័ត W = 1 | ជាមួយនឹងភាពចល័ត W > 1 | |||||
អង្ករ។ ២.៣. យន្តការបឋម
យោងតាមនិយមន័យ យន្តការបឋម (បឋមសិក្សា) ទាំងអស់ត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតំណភ្ជាប់ផ្លាស់ទីមួយជាមួយនឹងជំហរមួយ និងជាយន្តការថ្នាក់ដំបូង។ ក្នុងករណីនេះថ្នាក់ត្រូវគ្នាទៅនឹងចំនួននៃផ្នែកផ្លាស់ទី។
ក្រុមរចនាសម្ព័ន្ធនៃតំណភ្ជាប់(SGZ) គឺជាខ្សែសង្វាក់ kinematic ដែលបង្កើត
ងូតទឹកដោយការផ្លាស់ទីនៃតំណនៃយន្តការ ការចល័តដែលនៅក្នុងលំហ និងនៅលើយន្តហោះគឺសូន្យនៅពេលណាមួយ ហើយមិនបំបែកទៅជាខ្សែសង្វាក់សាមញ្ញដែលមានលក្ខណៈសម្បត្តិស្រដៀងគ្នា។
(អង្ករ។ 2.4. រូប 2.5. រូប 2.6).
ដំបូង ការចាត់ថ្នាក់តាមលំដាប់នៃ L.V. Assur គ្របដណ្តប់តែយន្តការ lever រាបស្មើជាមួយនឹងគូ kinematic បង្វិល។ ក្រោយមកសាស្រ្តាចារ្យ I. I. Artobolevsky បានកែលម្អការចាត់ថ្នាក់នេះ ដោយពង្រីកវាទៅជាយន្តការដងថ្លឹងរាបស្មើ និងជាមួយនឹងគូ kinematic បកប្រែ ដែលជាមូលដ្ឋានសម្រាប់ការបង្កើតទ្រឹស្តីនៃក្រុមរចនាសម្ព័ន្ធ យោងទៅតាមក្រុមរចនាសម្ព័ន្ធគឺជាខ្សែសង្វាក់ kinematic ដែលមានគូ kinematic ទាបដែល បំពេញលក្ខខណ្ឌ
W s.g= 3 n s.g− 2 p 1− p 2 = 0 ,
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.2. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង
ដែល W s.g ,n s.g - ការចល័ត និងចំនួននៃតំណភ្ជាប់ផ្លាស់ទីនៃក្រុមរចនាសម្ព័ន្ធ
py; p 1 ,p 2 - ចំនួនគូ kinematic នៃការចល័តដែលត្រូវគ្នា។ លក្ខណៈពិសេសនៃក្រុមរចនាសម្ព័ន្ធគឺភាពមិនច្បាស់លាស់ឋិតិវន្តរបស់ពួកគេ។
ដែនកំណត់ ប្រសិនបើក្រុមរចនាសម្ព័ន្ធមួយត្រូវបានភ្ជាប់ទៅនឹង rack ជាមួយនឹងធាតុដោយឥតគិតថ្លៃនៃតំណភ្ជាប់នោះ truss indeterminate ឋិតិវន្តត្រូវបានបង្កើតឡើង។ ដោយប្រើទ្រព្យសម្បត្តិនៃក្រុមរចនាសម្ព័ន្ធនេះ វាងាយស្រួលក្នុងការអនុវត្តការវិភាគរចនាសម្ព័ន្ធ kinematic និងកម្លាំងនៃយន្តការ។ នៅក្នុងក្រុមរចនាសម្ព័ន្ធទាំងអស់ តំណភ្ជាប់ចុងគឺជាផ្នែកមួយនៃគូ kinematic តែមួយ ហើយមានធាតុតំណភ្ជាប់ឥតគិតថ្លៃ។ តំណភ្ជាប់បែបនេះត្រូវបានគេហៅថា leashes ។
ខ្សែភ្ជាប់គឺជាតំណភ្ជាប់ចុងក្រោយនៃក្រុមរចនាសម្ព័ន្ធ ធាតុមួយគឺជាផ្នែកមួយនៃគូ kinematic មួយ និងមានធាតុទីពីរដោយឥតគិតថ្លៃនៃតំណភ្ជាប់។
ក្រុមរចនាសម្ព័ន្ធអាចត្រូវបានបង្កើតឡើងដោយចំនួនគូនៃគ្រឿងផ្លាស់ទី (សូមមើលរូប 2.4 - 2.6) ។ កម្រិតនៃភាពស្មុគស្មាញនៃក្រុមរចនាសម្ព័ន្ធត្រូវបានកំណត់លក្ខណៈដោយថ្នាក់របស់វា។ ថ្នាក់នៃក្រុមរចនាសម្ព័ន្ធត្រូវបានកំណត់ដោយចំនួនតំណភ្ជាប់និងគូ kinematic ដោយគិតគូរពីចំនួនចំនុចកំពូលនៃតំណភ្ជាប់ស្មុគស្មាញបំផុត។ ភាពស្មុគស្មាញនៃក្រុមរចនាសម្ព័ន្ធកំណត់ថ្នាក់នៃយន្តការ។ ដូច្នោះហើយថ្នាក់នៃយន្តការត្រូវបានកំណត់ដោយថ្នាក់នៃក្រុមរចនាសម្ព័ន្ធស្មុគស្មាញបំផុតដែលរួមបញ្ចូលនៅក្នុងសមាសភាពរបស់វា។ នៅក្នុងថ្នាក់មួយ ក្រុមរចនាសម្ព័ន្ធត្រូវបានបែងចែកទៅជាលំដាប់។ លំដាប់នៃក្រុមរចនាសម្ព័ន្ធត្រូវគ្នាទៅនឹងចំនួននៃការនាំមុខ។
នៅក្នុងរចនាសម្ព័ន្ធនៃយន្តការ lever ក្រុមរចនាសម្ព័ន្ធទូទៅបំផុតគឺក្រុមដែលមានតំណភ្ជាប់ពីរ (2 និង 3) និងបីគូ kinematic នៃថ្នាក់ទី 5 (រូបភាព 2.4) ។ ក្រុមរចនាសម្ព័នទាំងនេះមានតំណភ្ជាប់ដែលអាចចល័តបានពីរដែលមានបន្ទាត់បញ្ឈរពីរដែលត្រូវគ្នាទៅនឹងថ្នាក់ទីពីរ។ ក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរមានខ្សែយ៉ាងហោចណាស់ពីរដែលបង្ហាញពីវត្តមាននៃការបញ្ជាទិញជាច្រើននៅក្នុងថ្នាក់។ បច្ចុប្បន្ននេះក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរគឺរីករាលដាលបំផុតដែលជាលក្ខណៈលក្ខណៈដែលមានវត្តមាននៃប្រាំប្រភេទ (រូបភាព 2.4) ។
ប្រភេទនៃក្រុមរចនាសម្ព័ន្ធត្រូវបានកំណត់ដោយរូបមន្តរចនាសម្ព័ន្ធរបស់វាដែលត្រូវបានចងក្រងអាស្រ័យលើប្រភេទនិងថ្នាក់នៃគូ kinematic ។ ក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ (រូបភាព 2.4, ក) ត្រូវបានបង្កើតឡើងដោយតំណភ្ជាប់ពីរ, ពីរនាំមុខនិងមានបីគូបង្វិលនៃថ្នាក់ទី 5 មានរូបមន្តរចនាសម្ព័ន្ធ BBB ដែលត្រូវគ្នាទៅនឹងប្រភេទទីមួយ។ ប្រភេទទីពីរនៃក្រុមនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ (រូបភាព 2.4, ខ) ត្រូវបានទទួលដោយការជំនួសមួយនៃគូ kinematic បង្វិលខ្លាំងជាមួយនឹងគូបកប្រែនៃថ្នាក់ទី 5 ។ រូបមន្តរចនាសម្ព័ន្ធនៃក្រុមលទ្ធផលនឹងមានទម្រង់ GDP ឬ PVV ។
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |

2. យន្តការ LEVER | |||||||||||
២.២. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង | |||||||||||
៤ ក ១ | |||||||||||
អង្ករ។ ២.៤. ក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ | |||||||||||
ប្រភេទទីបីនៃក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ (រូបភាព 2.4, គ) មានរូបមន្តរចនាសម្ព័ន្ធនៃ ERW និងត្រូវបានបង្កើតឡើងដោយសារតែការជំនួសនៃគូ kinematic បង្វិលមធ្យមជាមួយនឹងគូបកប្រែនៃថ្នាក់ទី 5 ។ ប្រភេទទី 4 នៃក្រុមនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ (រូបភាព 2.4, ឃ) ត្រូវបានទទួលដោយការជំនួសគូ kinematic បង្វិលខ្លាំងទាំងពីរនៃថ្នាក់ទី 5 ជាមួយនឹងគូបកប្រែដែលត្រូវគ្នាទៅនឹងរូបមន្តរចនាសម្ព័ន្ធនៃ PVP ។ ការជំនួសគូ kinematic rotational ខ្លាំង និងកណ្តាលមួយជាមួយនឹងគូបកប្រែអនុញ្ញាតឱ្យយើងទទួលបានប្រភេទទី 5 នៃក្រុមនៃថ្នាក់ទីពីរនៃលំដាប់ទីពីរ (រូបភាព 2.4, ឃ) ដែលមានរូបមន្តរចនាសម្ព័ន្ធ PPV ឬ VPP ។
យន្តការដែលមានតែក្រុមរចនាសម្ព័ន្ធថ្នាក់ទីពីរ គឺជាយន្តការថ្នាក់ទីពីរ។
តាមទ្រឹស្តី មានក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ធំៗ ប៉ុន្តែដោយសារតែអត្រាប្រេវ៉ាឡង់ទាបនៅក្នុងកម្មវិធីសិក្សា យើងនឹងដាក់កម្រិតខ្លួនយើងចំពោះក្រុមរចនាសម្ព័ន្ធនៃថ្នាក់ទីពីរ។
ភាពបត់បែននៃយន្តការដងថ្លឹងលំហ
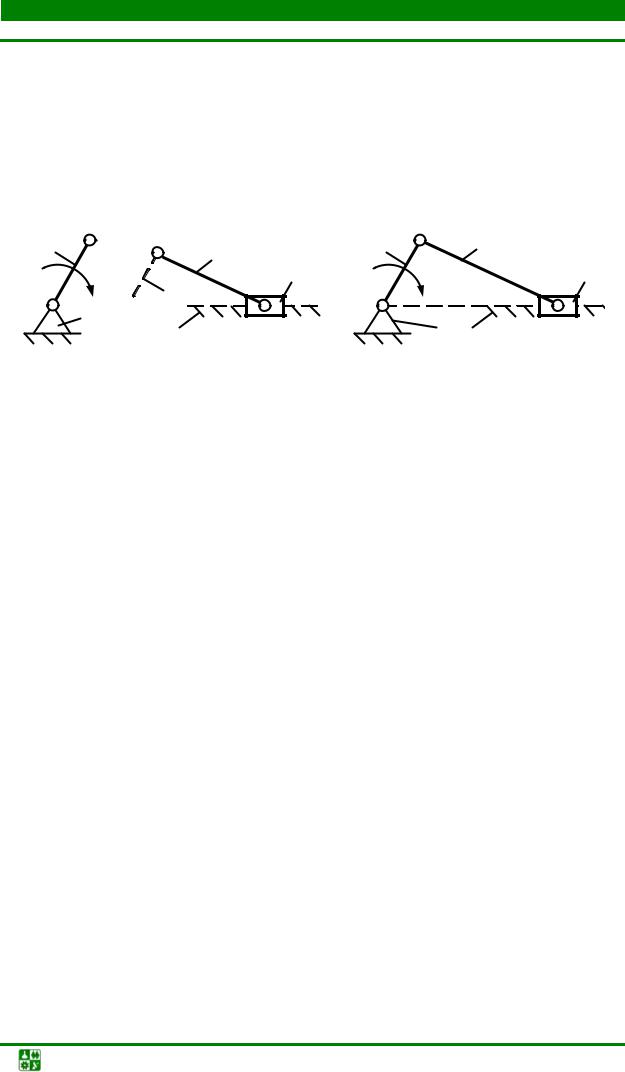
អ្នកតំណាងទូទៅបំផុតនៃយន្តការដងថ្លឹងគឺជាឧបាយកល (រូបភាព 2.5, ក) ។
ឧបាយកលគឺជាយន្តការដងថ្លឹងដែលធ្វើសកម្មភាពស្រដៀងនឹងដៃមនុស្ស។
ឧបាយកលត្រូវបានរចនាឡើងដើម្បីផ្លាស់ប្តូរទីតាំងរបស់វត្ថុ។ តំណភ្ជាប់នៃឧបាយកលនៃមនុស្សយន្តឧស្សាហកម្មបង្កើតបានតែ
ខ្សែសង្វាក់ kinematic បិទដែលមានគូ kinematic នៃថ្នាក់ផ្សេងៗគ្នា ដែលអនុញ្ញាតឱ្យយន្តការបែបនេះមានចលនាធំជាងមួយ។ ទោះជាយ៉ាងណាក៏ដោយឧបាយកលត្រូវបានកំណត់លក្ខណៈដោយសមត្ថភាពក្នុងការផ្លាស់ប្តូររចនាសម្ព័ន្ធនៃយន្តការក្នុងអំឡុងពេលប្រតិបត្តិការរបស់វា។ អាស្រ័យលើគោលបំណងសេវាកម្ម ជម្រើសពីរគឺអាចធ្វើទៅបាន។
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |

2. LEVER GEARS
2.2. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង
អង្ករ។ ២.៥. ដ្យាក្រាមនៃយន្តការរៀបចំមនុស្សយន្តឧស្សាហកម្ម
ជម្រើសទីមួយ៖ អ្នកត្រូវផ្លាស់ប្តូរទីតាំងរបស់វត្ថុស្ថានី (រូបភាព ២.៥, ក)។ នៅពេលដំបូងនៃពេលវេលា វត្ថុដែលទីតាំងដែលត្រូវផ្លាស់ប្តូរគឺស្ថិតនៅលើយន្តហោះស្ថានី ហើយកំពុងសម្រាក។ ដូច្នោះហើយ វត្ថុ និងយន្តហោះកំណត់ទំនាក់ទំនងជាក់លាក់លើគ្នាទៅវិញទៅមក។ លើសពីនេះទៅទៀត ប្រសិនបើទំនាក់ទំនងរវាងយន្តហោះ និងវត្ថុមិនផ្លាស់ប្តូរស្ថានភាព kinematic របស់វា នោះពួកគេអាចចាត់ទុកថាជាតំណភ្ជាប់ថេរមួយ ដែលជាការឈរ។ នៅពេលដែលត្រូវគ្នានឹងការចាប់យកវត្ថុនៅក្នុងសំណួរដោយតំណលទ្ធផល តំណភ្ជាប់នេះក៏ក្លាយទៅជាគ្មានចលនា ហើយត្រូវតែចាត់ទុកថាជាធាតុនៃ rack (រូបភាព 2.5, ខ) ។ ដូច្នោះហើយចំនួននៃតំណភ្ជាប់ផ្លាស់ទីនៅក្នុងរចនាសម្ព័ន្ធនៃយន្តការថយចុះមួយហើយខ្សែសង្វាក់ kinematic បើកចំហដែលយន្តការមានរហូតដល់ពេលនេះបានបិទដែលនាំឱ្យមានការថយចុះនៃការចល័តរបស់វា។ នៅពេលបន្ទាប់ក្នុងពេលវេលា វានឹងត្រូវការដើម្បីហែកវត្ថុចេញឆ្ងាយពីយន្តហោះដែលនៅស្ងៀមដើម្បីផ្លាស់ទីវាទៅមុខទៀត។ ទោះយ៉ាងណាក៏ដោយ ដើម្បីអនុវត្តសកម្មភាពបែបនេះ ឧបាយកលដែលនៅពេលណាមួយមានខ្សែសង្វាក់ kinematic បិទ ត្រូវតែមានភាពចល័តយ៉ាងហោចណាស់ស្មើនឹងមួយ។ ដរាបណាវត្ថុមួយត្រូវបានបំបែកចេញពីយន្តហោះថេរ វានឹងបាត់បង់ទំនាក់ទំនងដែលមានពីមុនរបស់វាជាមួយយន្តហោះនេះ ហើយនៅពេលអនាគត វាត្រូវតែត្រូវបានពិចារណារួមគ្នាជាមួយនឹងតំណភ្ជាប់លទ្ធផលជាតំណផ្លាស់ទីមួយ។ នៅពេលនៃការស្ដារឡើងវិញនៃការចល័តដោយតំណភ្ជាប់ទិន្នផល ខ្សែសង្វាក់ kinematic នៃឧបាយកលបានបើកម្តងទៀត ដែលនាំទៅដល់ការចល័តពីមុននៃយន្តការ និងសមត្ថភាពក្នុងការផ្លាស់ទីវត្ថុមួយដោយយោងទៅតាមច្បាប់ដែលបានផ្តល់ឱ្យ។
ជម្រើសទីពីរ៖ អ្នកត្រូវដំឡើងផ្នែកចូលទៅក្នុងរន្ធនៃរូបរាងជាក់លាក់ដែលធ្វើឡើងក្នុងផ្ទៃថេរ។ នៅពេលនៃពេលវេលាដែលត្រូវគ្នានឹងការដំឡើងតំណភ្ជាប់ទិន្នផលនៃផ្នែកចូលទៅក្នុងរន្ធតំណភ្ជាប់ទិន្នផលនៅតែអាចផ្លាស់ទីបានហើយខ្សែសង្វាក់ kinematic នៃឧបាយកលបិទ (រូបភាព 2.5, គ) ។ ក្នុងករណីនេះចំនួននៃតំណភ្ជាប់ផ្លាស់ទីត្រូវបានរក្សាទុកហើយភាពចល័តនៃយន្តការផ្លាស់ប្តូរសមាមាត្រទៅនឹងការចល័តនៃគូ kinematic ថ្មីដែលបង្កើតឡើងដោយផ្នែកនិងផ្ទៃថេរដែលវាត្រូវបានដំឡើង។ នៅពេលនៃការបញ្ចប់នៃការតភ្ជាប់រវាងតំណភ្ជាប់លទ្ធផលនិងផ្នែក
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.2. ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដងថ្លឹង
ខ្សែសង្វាក់ kinematic ក្លាយជាបើកចំហ ហើយយន្តការស្ដារឡើងវិញនូវលក្ខណៈសម្បត្តិរបស់វា។
ពីស្ថានភាពដែលបានពិចារណា វាដូចខាងក្រោមថាការធានានូវប្រតិបត្តិការរបស់ឧបាយកលគឺអាចធ្វើទៅបានលុះត្រាតែបានបំពេញលក្ខខណ្ឌដូចខាងក្រោមៈ
m ≥ ១.
ដែល m គឺជាភាពបត់បែននៃឧបាយកល។
Maneuverability គឺជាការចល័តរបស់អ្នករៀបចំជាមួយនឹងតំណភ្ជាប់ទិន្នផលស្ថានី។
ភាពបត់បែននៃយន្តការលំហ ត្រូវបានកំណត់ដោយកន្សោមដែលទទួលបានដោយផ្អែកលើរូបមន្ត Somov៖
m =6 n −5 p 5 −4 p 4 −3 p 3 −2 p 2 −p 1
ដែលមេគុណទាំងអស់គឺដូចគ្នាទៅនឹងអ្វីដែលបានបង្ហាញក្នុង§ 2.3 ។
២.៣. ការសំយោគយន្តការលីវើរ
ការសំយោគយន្តការត្រូវបានអនុវត្តជាពីរដំណាក់កាល។ ដំណាក់កាលទីមួយត្រូវបានគេហៅថា ការសំយោគរចនាសម្ព័ន្ធ ហើយដំណាក់កាលទីពីរហៅថា ការសំយោគម៉ែត្រ។ លក្ខណៈវិនិច្ឆ័យទូទៅដែលត្រូវបានអនុវត្តតាមនៅដំណាក់កាលនីមួយៗគឺ៖ ការបង្រួមអប្បបរមាលក្ខណៈទម្ងន់សរុប និងតម្លៃនៃយន្តការ ក៏ដូចជាការធានានូវការផលិតតំណភ្ជាប់ និងការបំពេញលក្ខខណ្ឌប្រតិបត្តិការ។ ទោះយ៉ាងណាក៏ដោយ ដំណាក់កាលនីមួយៗមានគោលដៅខុសៗគ្នា។
ចូរយើងកំណត់លក្ខណៈនៃដំណាក់កាលនីមួយៗដោយឡែកពីគ្នា។
ការសំយោគរចនាសម្ព័ន្ធគឺជាដំណើរការនៃការរចនាថ្មី ឬទំនើបកម្ម (ការកែលម្អ) រចនាសម្ព័ន្ធដែលមានស្រាប់នៃយន្តការដែលមានលក្ខណៈសម្បត្តិដែលត្រូវការ៖ ចំនួនចលនាដែលបានផ្តល់ឱ្យ អវត្ដមាននៃចលនាក្នុងតំបន់ និងការតភ្ជាប់ដែលលែងត្រូវការ អប្បបរមានៃតំណភ្ជាប់ ការប្រើប្រាស់គូ kinematic នៃ ប្រភេទជាក់លាក់មួយ។
នៅដំណាក់កាលនៃការសំយោគរចនាសម្ព័ន្ធដ្យាក្រាមរចនាសម្ព័ន្ធនៃយន្តការត្រូវបានបង្កើតឡើងដែលកំណត់ចំនួនតំណភ្ជាប់ចំនួនប្រភេទនិងភាពចល័តនៃគូ kinematic ក៏ដូចជាចំនួននៃការតភ្ជាប់ដែលលែងត្រូវការតទៅទៀតនិងការចល័តក្នុងតំបន់។ ការណែនាំនៃយន្តការនៃការតភ្ជាប់ដែលលែងត្រូវការគ្នា និងការចល័តក្នុងតំបន់ទៅក្នុងដ្យាក្រាមរចនាសម្ព័ន្ធត្រូវតែបង្ហាញឱ្យឃើញពីភាពត្រឹមត្រូវ។ លក្ខខណ្ឌចម្បងនៅពេលជ្រើសរើសដ្យាក្រាមរចនាសម្ព័ន្ធគឺជាប៉ារ៉ាម៉ែត្រដែលបានបញ្ជាក់៖ ចំនួនចលនាដែលត្រូវការ អវត្តមាននៃចលនាក្នុងតំបន់ និងការតភ្ជាប់ដែលលែងត្រូវការ កាត់បន្ថយចំនួនតំណភ្ជាប់ ការប្រើប្រាស់គូ kinematic នៃប្រភេទ ឬថ្នាក់ជាក់លាក់មួយ។ ទន្ទឹមនឹងនេះលក្ខខណ្ឌកំណត់គឺ: ច្បាប់នៃចលនាដែលបានផ្តល់ឱ្យនិងទីតាំងនៃអ័ក្សនៃតំណភ្ជាប់បញ្ចូលនិងទិន្នផល។ ប្រសិនបើអ័ក្សនៃតំណភ្ជាប់បញ្ចូល និងទិន្នផលនៃយន្តការស្របគ្នានោះ ដ្យាក្រាមប្លុករាបស្មើត្រូវបានជ្រើសរើស។ នៅពេលដែលអ័ក្សនៃតំណភ្ជាប់បញ្ចូលនិងទិន្នផលប្រសព្វគ្នាឬឆ្លងកាត់សូមប្រើ
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.3. ការសំយោគយន្តការដងថ្លឹង
ប្រើគ្រោងការណ៍លំហ។ ក្នុងករណីភាគច្រើន ភារកិច្ចនៃការសំយោគរចនាសម្ព័ន្ធគឺធ្លាក់មកលើការជ្រើសរើសដ្យាក្រាមរចនាសម្ព័ន្ធនៃយន្តការពីសំណុំនៃដ្យាក្រាមស្តង់ដារ។
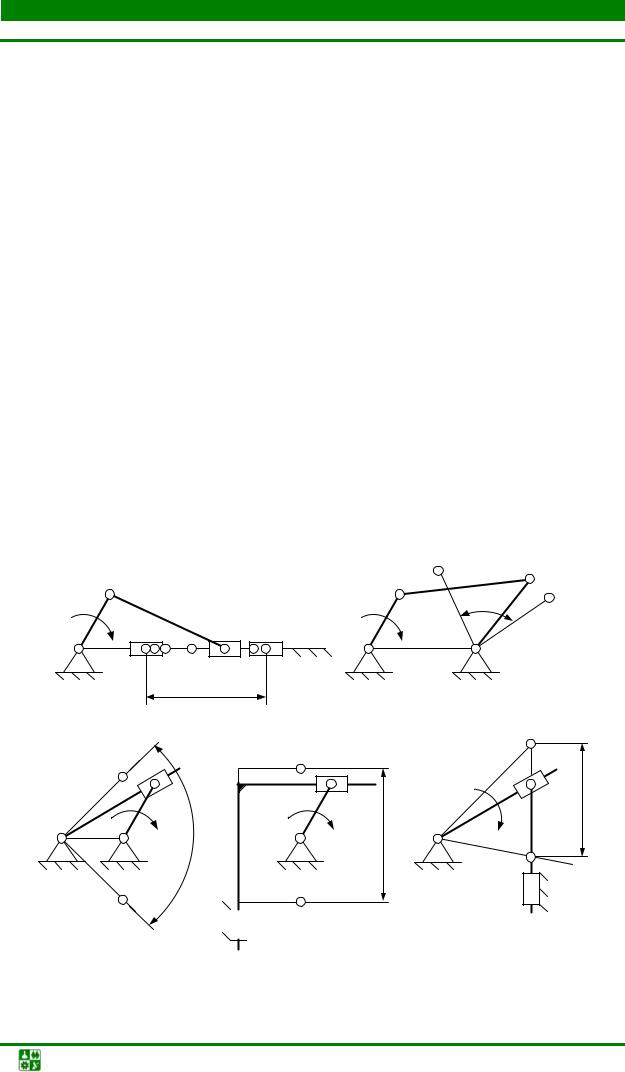
ការសំយោគរចនាសម្ព័ន្ធនៃយន្តការ lever រាបស្មើត្រូវបានអនុវត្តស្របតាមការចាត់ថ្នាក់តាមលំដាប់នៃ L.V. Assur (សូមមើលរូបភាព 2.3) ។ ជាឧទាហរណ៍ សូមពិចារណាការសំយោគរចនាសម្ព័ន្ធនៃយន្តការ crank-slider (រូបភាព 2.6)។
អង្ករ។ ២.៦. គ្រោងការណ៍នៃការសំយោគរចនាសម្ព័ន្ធនៃយន្តការ crank-slider
លទ្ធផលនៃកិច្ចការដំបូងនៃការវិភាគរចនាសម្ព័ន្ធបង្ហាញថាការចល័តនៃយន្តការគឺស្មើនឹងការរួបរួម ដូច្នេះជាយន្តការចម្បងដែលយើងជ្រើសរើសក្រុមនៃតំណភ្ជាប់នៃការចល័តដែលត្រូវគ្នា តំណភ្ជាប់ដែលបង្កើតជាគូ kinematic បង្វិលនៃទីប្រាំ។ ថ្នាក់ (រូបភាព 2.6, ក) ។ ទៅយន្តការបឋមដែលបានជ្រើសរើសយើងភ្ជាប់ក្រុមរចនាសម្ព័ន្ធនៃតំណភ្ជាប់នៃថ្នាក់ទី 2 នៃលំដាប់ទី 2 នៃប្រភេទទី 2 (រូបភាព 2.6, ខ) ។ យន្តការដែលទទួលបានតាមរបៀបនេះនឹងមានរចនាសម្ព័ន្ធសមហេតុផល ពោលគឺដ្យាក្រាមរចនាសម្ព័ន្ធរបស់វានឹងមិនមានពិការភាពរចនាសម្ព័ន្ធទេ (រូបភាព 2.6, គ)។
ដ្យាក្រាមរចនាសម្ព័ន្ធស្មុគ្រស្មាញបន្ថែមទៀតអាចទទួលបានដោយការភ្ជាប់ជាបន្តបន្ទាប់នូវចំនួនក្រុមរចនាសម្ព័ន្ធដែលត្រូវការនៃថ្នាក់ ប្រភេទ និងលំដាប់សមស្រប។ ក្នុងពេលជាមួយគ្នានេះវាចាំបាច់ដើម្បីធានាថារចនាសម្ព័ន្ធនៃយន្តការនៅតែមានហេតុផលនៅពេលដែលលក្ខខណ្ឌដែលបានបញ្ជាក់ផ្សេងទៀតទាំងអស់ត្រូវបានបំពេញ។
លទ្ធផលនៃដំណាក់កាលសំយោគរចនាសម្ព័ន្ធគឺជាដ្យាក្រាមរចនាសម្ព័ន្ធនៃយន្តការដែលបំពេញតាមលក្ខណៈវិនិច្ឆ័យដែលបានទទួលយក។
ការសំយោគម៉ែត្រគឺជាដំណើរការនៃការកំណត់វិមាត្រធរណីមាត្រជាមូលដ្ឋាននៃតំណភ្ជាប់យន្តការ និងការកំណត់រចនាសម្ព័ន្ធនៃទម្រង់ផ្ទៃការងារដែលបំពេញលក្ខខណ្ឌដែលបានផ្តល់ឱ្យបានល្អបំផុត និងផ្តល់នូវការរួមបញ្ចូលគ្នាដ៏ល្អប្រសើរនៃសូចនាករគុណភាព។
គោលបំណងនៃការសំយោគម៉ែត្រគឺ៖
1) ការសំយោគនៃដ្យាក្រាម kinematic នៃយន្តការដោយផ្អែកលើទីតាំងដែលបានបញ្ជាក់នៃតំណភ្ជាប់បញ្ចូលឬទិន្នផល;
2) ការសំយោគនៃដ្យាក្រាម kinematic នៃយន្តការនេះបើយោងតាមប៉ារ៉ាម៉ែត្រធរណីមាត្រដែលបានបញ្ជាក់;
3) ការសំយោគនៃដ្យាក្រាម kinematic នៃយន្តការនេះបើយោងតាមច្បាប់នៃចលនានៃតំណភ្ជាប់លទ្ធផលដែលបានផ្តល់ឱ្យ;
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.3. ការសំយោគយន្តការដងថ្លឹង
4) ការសំយោគនៃដ្យាក្រាម kinematic នៃយន្តការនេះបើយោងតាមប៉ារ៉ាម៉ែត្រ kinematic ដែលបានផ្តល់ឱ្យ: ល្បឿនមធ្យមនៃតំណភ្ជាប់ទិន្នផល, មេគុណនៃភាពមិនស្មើគ្នានៃល្បឿនមធ្យម;
5) ការសំយោគនៃដ្យាក្រាម kinematic នៃយន្តការដោយផ្អែកលើតម្លៃដែលបានផ្តល់ឱ្យនៃមុំសម្ពាធឬមុំបញ្ជូន។
ដំណោះស្រាយចំពោះបញ្ហានៃការសំយោគម៉ែត្រគឺជាដ្យាក្រាម kinematic នៃយន្តការដែលបំពេញតាមលក្ខណៈវិនិច្ឆ័យនៃដំណាក់កាលទាំងពីរនៃការសំយោគ។
ដ្យាក្រាម Kinematic- នេះគឺជាការតំណាងក្រាហ្វិកនៃយន្តការដែលធ្វើឡើងក្នុងកត្តាមាត្រដ្ឋានជាក់លាក់មួយដោយប្រើនិមិត្តសញ្ញាដែលបានណែនាំដោយ GOST ។
ដ្យាក្រាម kinematic មានព័ត៌មានអំពីចំនួនតំណភ្ជាប់ និងប្រភេទនៃចលនាដែលពួកគេអនុវត្ត ចំនួននៃការចល័ត និងថ្នាក់នៃគូ kinematic ចំនួន និងប្រភេទនៃខ្សែសង្វាក់ kinematic និងវិមាត្រនៃតំណភ្ជាប់។
នៅពេលដោះស្រាយបញ្ហានៃការសំយោគម៉ែត្រនៃយន្តការ lever ពួកគេត្រូវបានដឹកនាំដោយលក្ខណៈវិនិច្ឆ័យដូចខាងក្រោម:
1) លក្ខខណ្ឌសម្រាប់ការបង្វិលតំណភ្ជាប់ - យន្តការដែលបានរចនាត្រូវតែផ្តល់លទ្ធភាពសម្រាប់តំណភ្ជាប់បញ្ចូលឬលទ្ធផលដើម្បីបង្វិល
ច្រកទ្វារនៅមុំលើសពី 360 °;
2) ការរឹតបន្តឹងការរចនាលើវិមាត្រនៃយន្តការ - យន្តការដែលបានរចនាត្រូវតែមានវិមាត្ររួមដែលស្ថិតនៅក្នុងជួរដែលបានបញ្ជាក់។
3) ភាពត្រឹមត្រូវនៃការធានានូវច្បាប់នៃចលនា ឬទីតាំងជាក់លាក់នៃតំណភ្ជាប់នៃយន្តការ - យន្តការដែលបានរចនាត្រូវតែធានានូវការបំពេញនូវច្បាប់នៃចលនា ឬទីតាំងជាក់លាក់នៃតំណភ្ជាប់ជាមួយនឹងភាពត្រឹមត្រូវដែលត្រូវការ។
4) ដែនកំណត់លើលក្ខខណ្ឌសម្រាប់ការផ្ទេរកត្តាកម្លាំង - តម្លៃបច្ចុប្បន្ននៃមុំសម្ពាធនៃយន្តការដែលបានរចនាមិនគួរលើសពីតម្លៃដែលអាចអនុញ្ញាតបាន;
5) លក្ខខណ្ឌ និងតម្រូវការផ្សេងទៀតដោយគិតគូរពីភាពជាក់លាក់នៃដំណើរការ និងប្រតិបត្តិការនៃយន្តការ។
TO វិធីសាស្រ្តនៃការសំយោគនៃយន្តការរួមមានការសំយោគដោយវិធីសាស្រ្តនៃការវិភាគ
និង វិធីសាស្រ្តនៃការសំយោគដោយផ្ទាល់ (ការវិភាគក្រាហ្វិកនិងក្រាហ្វិក - វិភាគ) ។
ការសំយោគម៉ែត្រនៃយន្តការដោយប្រើវិធីសាស្ត្រវិភាគក្រាហ្វិកត្រូវបានអនុវត្តក្នុងកត្តាមាត្រដ្ឋានជាក់លាក់មួយ។
កត្តាមាត្រដ្ឋាន- នេះគឺជាទំនាក់ទំនងនៃការពិតណាមួយ -
តម្លៃដែលបានផ្តល់ឱ្យ l យកជាម៉ែត្រទៅប្រវែងនៃផ្នែក l វាស់ជាមីលីម៉ែត្រ និងពណ៌នាតម្លៃនេះជាផ្នែកមួយនៃដ្យាក្រាម kinematic ។
មាត្រដ្ឋានប្រវែងគឺជាសមាមាត្រនៃប្រវែងនៃផ្នែកដែលពណ៌នាតម្លៃណាមួយជាមិល្លីម៉ែត្រទៅតម្លៃពិតគិតជាម៉ែត្រ។
មាត្រដ្ឋានគឺជាបរិមាណស្តង់ដារតម្លៃដែលត្រូវបានគ្រប់គ្រងយ៉ាងតឹងរ៉ឹងដោយបទប្បញ្ញត្តិនៃ GOST ។ ពីបទប្បញ្ញត្តិនៃវិន័យ "ក្រាហ្វិកវិស្វកម្ម" វាត្រូវបានគេស្គាល់ថាមាត្រដ្ឋានពិតប្រាកដ
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |

2. LEVER GEARS
2.3. ការសំយោគយន្តការដងថ្លឹង
ពាក់ 1×1 ហើយមានជញ្ជីងពង្រីក និងមាត្រដ្ឋានកាត់បន្ថយ។ កត្តាមាត្រដ្ឋានគឺជាតម្លៃទៅវិញទៅមកនៃមាត្រដ្ឋាន ហើយមិនមែនជាតម្លៃស្តង់ដារទេ។ តម្លៃនៃកត្តាមាត្រដ្ឋានត្រូវបានគេយកតាមអំពើចិត្ត អាស្រ័យលើលក្ខខណ្ឌ និងគោលដៅដែលបានបញ្ជាក់សម្រាប់ការដោះស្រាយបញ្ហាដែលត្រូវការ។
μl = OA l OA,
ដែល l OA គឺជាប្រវែងពិតប្រាកដនៃ crank; OA គឺជាផ្នែកបំពាន
២.៤. សូចនាករគុណភាពនៃយន្តការ LEVER
ការរឹតបន្តឹងនិងលក្ខខណ្ឌនៃការសំយោគម៉ែត្របង្កើតជាតម្លៃនៃសូចនាករគុណភាព ដោយមានជំនួយពីគុណភាពនៃយន្តការ lever ត្រូវបានវាយតម្លៃ។
សូចនាករគុណភាពនៃយន្តការ lever គឺ: ប្រសិទ្ធភាព η;
យន្តការដាច់សរសៃឈាមខួរក្បាល H;
មេគុណនៃភាពមិនស្មើគ្នានៃល្បឿនមធ្យម k; មុំសម្ពាធϑ; មុំបញ្ជូនμ
ប្រសិទ្ធភាពη គឺជាបរិមាណគ្មានវិមាត្រ ហា-
កំណត់លក្ខណៈបរិមាណថាមពលសរុបដែលប្រើប្រាស់ដោយយន្តការ។ ដូចដែលបានកត់សម្គាល់នៅក្នុង§ 1.4 ប្រសិទ្ធភាពនៃយន្តការគឺតែងតែតិចជាងមួយចាប់តាំងពីដំណើរការនៃការផ្លាស់ប្តូរចលនាត្រូវបានអមដោយការបាត់បង់ថាមពលមេកានិចដែលបណ្តាលមកពីវត្តមាននៃការកកិតនៅក្នុងគូ kinematic ។ តម្លៃប្រសិទ្ធភាពកាន់តែជិតគឺការរួបរួម ការខាតបង់កាន់តែទាប ដូច្នេះគុណភាពនៃយន្តការដងថ្លឹងកាន់តែខ្ពស់។
តំបន់ធ្វើការនៃយន្តការ lever ផ្ទះល្វែងជាធម្មតាត្រូវបានវាយតម្លៃដោយជួរនៃចលនានៃតំណភ្ជាប់ទិន្នផលដែលហៅថាជំងឺដាច់សរសៃឈាមខួរក្បាលនៃយន្តការ។
ការដាច់សរសៃឈាមខួរក្បាលនៃយន្តការគឺជាចម្ងាយរវាងទីតាំងដំបូងនិងចុងក្រោយនៃតំណភ្ជាប់ទិន្នផល។
សម្រាប់ crank-slider (Fig ។ 2.7, a), sine (Fig ។ 2.7, d) និង tangential (Fig ។ 2.7, d) ការដាច់សរសៃឈាមខួរក្បាលត្រូវបានគណនាតាមនិយមន័យនៃប៉ារ៉ាម៉ែត្រនេះ និងសម្រាប់ hinged (រូបភាព 2.7 ។ , b) និង rocker (រូបភាព 2.7, c) យន្តការ តម្លៃនៃប៉ារ៉ាម៉ែត្រនេះអាចត្រូវបានរកឃើញដោយកន្សោម
Н = ψ l,
ទ្រឹស្តីនៃយន្តការនិងម៉ាស៊ីន។ សៀវភៅសិក្សា ប្រាក់ឧបត្ថម្ភ |
2. LEVER GEARS
2.4.
ដែល l ,ψ – ប្រវែង និងមុំ រ៉ាដ នៃវិសាលភាពតំណភ្ជាប់លទ្ធផល។
មុំបង្វិលដៃរបស់ Rockerឬ rocker ψ គឺជាមុំរវាងទីតាំងដំបូង និងចុងក្រោយនៃដៃ rocker ឬ rocker (រូបភាព 2.7, b, c) ។
យន្តការដងថ្លឹងសំប៉ែតភាគច្រើនមានលក្ខណៈតាមកាលកំណត់នៃប្រតិបត្តិការ ពោលគឺបន្ទាប់ពីរយៈពេលជាក់លាក់ណាមួយ ដំណើរការទាំងអស់ដែលកើតឡើងនៅក្នុងយន្តការត្រូវបានធ្វើម្តងទៀត។ ក្នុងករណីនេះវដ្តប្រតិបត្តិការនៃយន្តការណាមួយត្រូវបានបែងចែកទៅជាដំណាក់កាលធ្វើការនិងទំនេរ។ ក្នុងកំឡុងដំណាក់កាលដាច់ចរន្តអគ្គិសនី គោលបំណងសេវាកម្មនៃយន្តការត្រូវបានអនុវត្ត ហើយដំណាក់កាលទំនេរគឺមានបំណងបញ្ចប់វដ្តនៃចលនា និងបន្ធូរបន្ថយភាពតានតឹងដែលនៅសេសសល់ពីផ្ទៃធ្វើការនៃតំណភ្ជាប់។ សមាមាត្រនៃពេលវេលាដែលចំណាយលើការធ្វើការ និងការដាច់សរសៃឈាមខួរក្បាលជាធម្មតាត្រូវបានវាយតម្លៃដោយប្រើមេគុណល្បឿនមធ្យមមិនស្មើគ្នា។
មេគុណល្បឿនមធ្យមមិនស្មើគ្នា គឺជាមេគុណ
កំណត់លក្ខណៈសមាមាត្រនៃពេលវេលាទំនេរ T x.x ទៅនឹងពេលវេលាដាច់សរសៃឈាមខួរក្បាលធ្វើការ T r.x :
T x.x | |||||
ដែល θ គឺជាមុំរវាងទីតាំងនៃដំបងតភ្ជាប់នៅក្នុងទីតាំងខ្លាំងនៃយន្តការ។
ក, ខ | ក, ខ | ក, ខ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
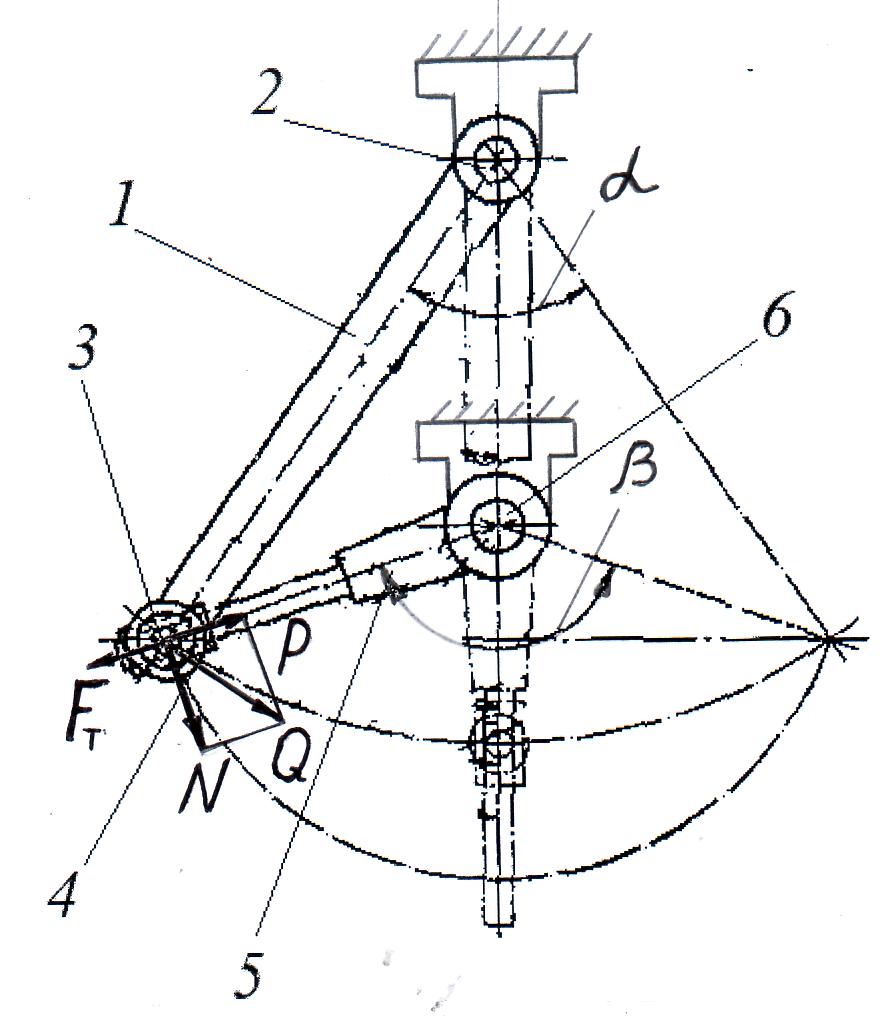
អង្ករ។ ២.៨. គ្រោងការណ៍សម្រាប់កំណត់មុំសម្ពាធនៃយន្តការដងថ្លឹងធម្មតា។ ដើម្បីវាយតម្លៃគុណភាពនៃការបញ្ជូនកត្តាកម្លាំងរវាងតំណភ្ជាប់នៃយន្តការដងថ្លឹងសំប៉ែតមុំសម្ពាធϑត្រូវបានប្រើ។ មុំសម្ពាធគឺជាមុំស្រួចរវាងវ៉ិចទ័រកម្លាំងសកម្ម P a, ធ្វើសកម្មភាពពីផ្នែកម្ខាងនៃតំណមុន និងវ៉ិចទ័រល្បឿននៃចំណុចនៃកម្មវិធីរបស់វា (រូបភាព 2.8) ។ តម្លៃនៃមុំសម្ពាធបង្កើតលក្ខខណ្ឌសម្រាប់ការផ្ទេរកម្លាំងរវាងតំណភ្ជាប់ដោយកំណត់ទំហំនៃកម្លាំងជំរុញនៃយន្តការ Q: Q = P a cos(ϑ) ។ ពីការវិភាគនៃកន្សោមវាដូចខាងក្រោមថាការថយចុះតម្លៃនៃមុំសម្ពាធនាំឱ្យមានការកើនឡើងនៃតម្លៃនៃកម្លាំងជំរុញហើយការកើនឡើងនៃមុំសម្ពាធកាត់បន្ថយកម្លាំងនេះ។ ក្នុងអំឡុងពេលប្រតិបត្តិការនៃយន្តការ lever មុំសម្ពាធគឺតែងតែϑ ≤ 90 °។ នៅពេលមុំសម្ពាធ ϑ > 90° ការកកស្ទះ ឬហ្វ្រាំងដោយខ្លួនឯងអាចកើតឡើងនៅក្នុងយន្តការ។ ការចាប់ហ្វ្រាំងដោយខ្លួនឯង ឬការកកស្ទះ គឺជាស្ថានភាពនៃយន្តការមួយ អមដោយតម្លៃនៃមុំសម្ពាធដែលធ្វើឱ្យវាមិនអាចទៅរួចសម្រាប់តំណភ្ជាប់ដើម្បីផ្លាស់ទីនៅតម្លៃធំណាមួយតាមអំពើចិត្តនៃកម្លាំងជំរុញ។ ដើម្បីលុបបំបាត់ស្ថានភាពបែបនេះ នៅពេលសំយោគយន្តការ តម្លៃដែលអាចអនុញ្ញាតបាននៃមុំសម្ពាធ [ϑ] ត្រូវបានបញ្ជាក់ ណែនាំដោយការណែនាំដូចខាងក្រោមៈ សម្រាប់យន្តការដែលតំណភ្ជាប់បង្កើតបានតែគូ kinematic បង្វិល មុំសម្ពាធដែលអាចអនុញ្ញាតបានស្ថិតនៅក្នុងជួរ។
2. LEVER GEARS 2.4. សូចនាករគុណភាពនៃយន្តការ lever [ϑ] = 45− 60° និងសម្រាប់យន្តការដែលមានការរួមបញ្ចូលគ្នានៃគូ kinematic បង្វិល និងបកប្រែ [ϑ] = 30− 45°។ នៅតម្លៃមុំសម្ពាធ [ϑ ] = 90° យន្ដការស្ថិតនៅក្នុងអ្វីដែលគេហៅថា "ស្លាប់" ទីតាំងដែលនៅក្នុងឋិតិវន្តនាំឱ្យមានការជាប់គាំងនៃតំណក្នុងចលនា (ថាមវន្ត) យន្ដការបានយកឈ្នះលើទីតាំងបែបនេះដោយសារតែការជាប់គាំងនៃតំណ បរិមាណបន្ថែមនៃថាមពល kinetic ។ ដើម្បីវាយតម្លៃគុណភាពនៃយន្តការ hinge បន្ថែមពីលើមុំសម្ពាធមុំបញ្ជូន μ ត្រូវបានប្រើ (រូបភាព 2.8, ខ) ។ មុំបញ្ជូនគឺជាមុំដែលកំណត់ទីតាំងទាក់ទងនៃអ័ក្សនៃដំបងតភ្ជាប់ និងដៃ rocker នៃយន្តការ hinge ។ តម្លៃនៃមុំបញ្ជូននិងសម្ពាធគឺទាក់ទងគ្នា: ϑ+μ = 90°។ ការវិភាគនៃកន្សោមបង្ហាញថាការកើនឡើងនៃមុំសម្ពាធនាំឱ្យមានការថយចុះនៃមុំបញ្ជូនហើយផ្ទុយទៅវិញការកើនឡើងនៃតម្លៃនៃមុំបញ្ជូននាំឱ្យមានការថយចុះនៃមុំបញ្ជូន។ ការកើនឡើងឬថយចុះក្នុងពេលដំណាលគ្នានៃតម្លៃនៃសម្ពាធនិងមុំបញ្ជូនគឺមិនអាចទៅរួចទេ។ នៅពេលដែលមុំមួយស្មើនឹងសូន្យ តម្លៃនៃមុំទីពីរឈានដល់អតិបរមា ពោលគឺ 90° ..
|
នាំមុខតំណភ្ជាប់គឺជាតំណភ្ជាប់ដែលការងារនៃកម្លាំងខាងក្រៅដែលបានអនុវត្តទៅវាគឺវិជ្ជមាន, ទាសករ- អវិជ្ជមាន ឬស្មើនឹងសូន្យ។
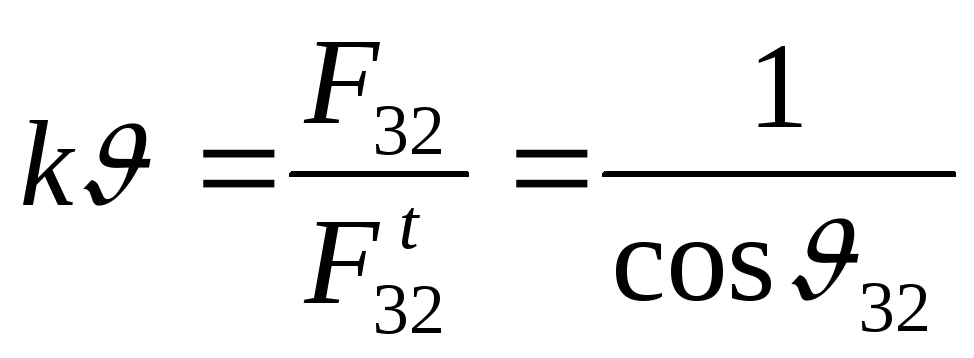
នៅក្នុងរូបភព។ រូបភាពទី 13.2 បង្ហាញពីយន្តការបួនរួមគ្នា។ ទៅតំណបញ្ចូល 1 ពេលបើកបរត្រូវបានអនុវត្តចំពោះយន្តការនេះ។ ម ឃ ទៅកាន់តំណលទ្ធផល 3 - ពេលនៃការតស៊ូ ម គ៣. នៅដំណាក់កាលរចនា ម៉ាស់ និងពេលនៃនិចលភាពនៃតំណភ្ជាប់នៅក្នុងរូបភព។ 13.2 ត្រូវបានកំណត់ ដូច្នេះកម្លាំងជំរុញដែលធ្វើសកម្មភាពលើតំណជំរុញគឺជាប្រតិកម្ម ច 32 ដឹកនាំតាមបន្ទាត់ ព្រះអាទិត្យ , ល្បឿននៃចំណុចនៃកម្មវិធីរបស់វានៅលើតំណ 3 - វ គ ផ្ញើទៅ ចំហៀង 3 កាត់កែងទៅនឹងតំណភ្ជាប់ 3 . ជ្រុង 32 រវាងវ៉ិចទ័រ ច 32 និង V គ - មុំសម្ពាធក្នុងគូបង្វិល ជាមួយ . នៅពេលដែលមុំនេះកើនឡើង ធាតុផ្សំតង់សង់នៃកម្លាំង ច t 32 ជំរុញការបង្វិលតំណ 3 ក្នុងទិសដៅ 3 , ថយចុះ, និងធម្មតា។ ច ន 32 ដែលមិនប៉ះពាល់ដល់ចលនា ប៉ុន្តែគ្រាន់តែខូចទ្រង់ទ្រាយ (បង្ហាប់) តំណភ្ជាប់ 3 , កើនឡើង។ នោះគឺជាមួយនឹងការកើនឡើងនៃមុំសម្ពាធលក្ខខណ្ឌសម្រាប់ការបញ្ជូនកម្លាំងនៅក្នុងប្រអប់លេខកាន់តែអាក្រក់ទៅ ៗ ។ ដោយសារនៅក្នុងប្រអប់លេខពិតតែងតែមានការកកិត ការចាប់ហ្វ្រាំងដោយខ្លួនឯង ឬការកកស្ទះអាចធ្វើទៅបាននៅតម្លៃជាក់លាក់នៃមុំសម្ពាធនៅក្នុងប្រអប់លេខ។
ការចាក់សោរឬកកស្ទះដោយខ្លួនឯង។- នេះគឺជាស្ថានភាពនៃយន្តការ នៅពេលដែលជាលទ្ធផលនៃការកើនឡើងនៃមុំសម្ពាធនៅក្នុងប្រអប់លេខមួយ ចលនារបស់យន្តការនឹងក្លាយទៅជាមិនអាចទៅរួចជាមួយនឹងតម្លៃដ៏ធំតាមអំពើចិត្តនៃកម្លាំងជំរុញ។ ជាញឹកញាប់ដើម្បីកំណត់លក្ខណៈនៃលក្ខខណ្ឌនៃការបញ្ជូនកម្លាំង មេគុណបង្កើនកម្លាំងត្រូវបានប្រើ (ដោយមិនគិតពីការកកិត)
|
|

ដោយសារនៅក្នុងយន្តការពិតតែងតែមានការកកិត ការកកស្ទះកើតឡើងនៅមុំសម្ពាធ < 90 . នៅពេលគណនាមេគុណបង្កើនកម្លាំងត្រូវបានបញ្ជាក់ (ឧទាហរណ៍ k = 2 ) និងកំណត់មុំសម្ពាធដែលអាចអនុញ្ញាតបាន។ [ ] . សម្រាប់ការគណនាបឋមវាត្រូវបានទទួលយកសម្រាប់យន្តការតែជាមួយគូបង្វិលប៉ុណ្ណោះ។ [ ] = 45 - 60 នៅក្នុងវត្តមាននៃចំណុចត្រួតពិនិត្យរីកចម្រើន [ ] = 30 - 45 . វាគួរតែត្រូវបានកត់សម្គាល់ថានៅក្នុងអ្វីដែលគេហៅថា "ស្លាប់" ទីតាំងនៃយន្តការ, មុំសម្ពាធ = 90 . នៅក្នុងស្ថានភាពឋិតិវន្ត យន្តការអាចជាប់គាំងនៅក្នុងទីតាំងនេះ នៅក្នុងឌីណាមិក យន្តការផ្លាស់ទីតាមទីតាំងទាំងនេះដោយប្រើថាមពល kinetic ដែលរក្សាទុកដោយតំណភ្ជាប់ផ្លាស់ទី។
គំនិតនៃមេគុណនៃភាពមិនស្មើគ្នានៃល្បឿនមធ្យម
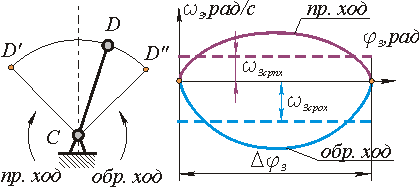
មេគុណនៃភាពមិនស្មើគ្នានៃល្បឿនមធ្យមនៃតំណភ្ជាប់ទិន្នផល k ត្រូវបានគេហៅថាសមាមាត្រនៃល្បឿនមធ្យមនៃតំណភ្ជាប់ទិន្នផលក្នុងអំឡុងពេលចលនារបស់វានៅលើជំងឺដាច់សរសៃឈាមខួរក្បាលត្រឡប់មកវិញ 3 វ៉ និងត្រង់ទៅមុខ ៣ វ
|
|
កន្លែងណា 

t អូ និង t ភី - ពេលវេលាបញ្ច្រាស និងពេលវេលាទៅមុខរៀងៗខ្លួន។
នៅពេលរចនាម៉ាស៊ីនបច្ចេកវិជ្ជាដែលបន្ទុកនៅលើតំណភ្ជាប់ទិន្នផលនៃយន្តការនៅក្នុងដំណើរការដាច់សរសៃឈាមខួរក្បាលដំណើរការឬទៅមុខគឺធំជាងការផ្ទុកនៅក្នុង idle ឬ reverse stroke វាជាការចង់បានដែលល្បឿននៃតំណភ្ជាប់ទិន្នផលនៅក្នុង stroke ទៅមុខគឺតិចជាង។ ជាងនៅក្នុងការបញ្ច្រាសមួយ។ ដើម្បីកាត់បន្ថយពេលវេលាទំនេរ វាក៏ចាំបាច់ផងដែរក្នុងការបង្កើនល្បឿនអំឡុងពេលការដាច់សរសៃឈាមខួរក្បាលបញ្ច្រាស។ ដូច្នេះ នៅពេលសំយោគយន្តការតាមម៉ែត្រវាជាញឹកញយត្រូវជ្រើសរើសទំហំតំណដែលផ្តល់មេគុណល្បឿនមធ្យមមិនស្មើគ្នា។
ALYUSHIN Yu.A.
ការវិភាគរចនាសម្ព័ន្ធនៃយន្តការដង្កៀប HINGED
(គោលគំនិតជាមូលដ្ឋាន និងឧទាហរណ៍នៃការធ្វើការងារឯករាជ្យ)
ការសិក្សាអំពីយន្តការដង្កៀបជាប់ពាក់ព័ន្ធនឹងការវិភាគរចនាសម្ព័ន្ធ ចលនា និងថាមវន្ត។ ការវិភាគរចនាសម្ព័ន្ធរួមមានការកំណត់ចំនួននៃតំណភ្ជាប់ផ្លាស់ទី និងគូ kinematic (KP) ការចាត់ថ្នាក់របស់ពួកគេ ការកំណត់ចំនួនដឺក្រេនៃសេរីភាពសម្រាប់យន្តហោះ និងយន្តការលំហ លុបបំបាត់ការតភ្ជាប់ដែលលែងត្រូវការតទៅទៀត (សម្រាប់ក្រុមលំហ) និង "សនិទានកម្ម" រចនាសម្ព័ន្ធយោងទៅតាម Assur ជាមួយនឹងការបកស្រាយថាមពលនៃបំរែបំរួលដែលអាចកើតមាននៃសៀគ្វីជាមួយនឹងការចល័តមិនច្របូកច្របល់។ រចនាសម្ព័ន្ធនៃយន្តការត្រូវបានកំណត់ដោយសំណុំនៃធាតុដែលទាក់ទងគ្នា (តំណភ្ជាប់ក្រុមនៃតំណភ្ជាប់ឬយន្តការស្តង់ដារ) និងទំនាក់ទំនងរវាងពួកវា (ប្រអប់លេខផ្លាស់ទីឬសន្លាក់ថេរ) ។ រចនាសម្ព័ន្ធនៃយន្តការនៅកម្រិតនៃតំណភ្ជាប់ប្រអប់លេខនិងក្រុមរចនាសម្ព័ន្ធត្រូវបានបង្ហាញនៅលើដ្យាក្រាមរចនាសម្ព័ន្ធរបស់វាដែលខុសពី kinematic មួយដែលមានព័ត៌មានបន្ថែមអំពីប្រភេទនៃគូ kinematic ភ្ជាប់ធាតុទាំងនេះ។
1. គំនិតជាមូលដ្ឋាននៃការវិភាគរចនាសម្ព័ន្ធ។
១.១. ភាពចល័ត (ចំនួនដឺក្រេនៃសេរីភាព) នៃយន្តការ - ចំនួននៃតំណភ្ជាប់នាំមុខ (កូអរដោនេទូទៅឯករាជ្យ) ដែលកំណត់ទីតាំងនៃតំណភ្ជាប់ផ្សេងទៀតទាំងអស់នៃយន្តការ (នៅលើយន្តហោះឬក្នុងលំហ) ។ 1.2. ការចល័តក្នុងតំបន់ - ភាពចល័តនៃតំណភ្ជាប់នីមួយៗនៃយន្តការ ដែលមិនប៉ះពាល់ដល់ចំនួនតំណបើកបរដែលត្រូវការ ប៉ុន្តែអនុញ្ញាតឱ្យមានការផ្លាស់ទីលំនៅនៃតំណភ្ជាប់ដែលអាចធ្វើទៅបានសម្រាប់គោលបំណងផ្សេងទៀត ឧទាហរណ៍ ការបង្វិលរបស់ roller ភ្ជាប់ជាស្នូលទៅនឹង pusher នៅក្នុងយន្តការ cam អនុញ្ញាត។ ការជំនួសការកកិតរអិលដោយការកកិតរំកិលលើផ្ទៃនៃ cam ។១.៣. ការតភ្ជាប់ - ការដាក់កម្រិតលើចលនានៃរាងកាយ (តំណភ្ជាប់យន្តការ) ។
១.៤. Assur ក្រុមរចនាសម្ព័ន្ធ។ យន្តការណាមួយអាចត្រូវបានតំណាងថាជាការរួមបញ្ចូលគ្នានៃយន្តការតំណពីរ (បឋម) មួយ ឬច្រើន និងក្រុម Assur មួយ ឬច្រើន។ ក្រុមរចនាសម្ព័ន្ធ Assur គឺជាខ្សែសង្វាក់ kinematic ដែលបង្កើតឡើងដោយផ្នែកនៃចលនានៃយន្តការមួយ ការចល័តដែល (នៅលើយន្តហោះ) គឺសូន្យ។ រូបមន្តរចនាសម្ព័ន្ធនៃក្រុម Assurពីទីនេះ
![]() ,
,
កន្លែងណា  ចំនួននៃតំណភ្ជាប់;
ចំនួននៃតំណភ្ជាប់;  - ចំនួននៃ CPs ទាបនៅក្នុងក្រុមរចនាសម្ព័ន្ធ។ ដោយសារលេខទាំងអស់ត្រូវតែជាចំនួនគត់ ចំនួនតំណភ្ជាប់នៅក្នុងក្រុមរចនាសម្ព័ន្ធត្រូវតែជាគូជានិច្ច ហើយចំនួននៃ CP ទាបត្រូវតែជាពហុគុណនៃ 3 ។ ១.៤.១. ក្រុម Assur
- ខ្សែសង្វាក់ kinematic រាបស្មើជាមួយនឹងការចល័តសូន្យ។ 1.4.2.
ថ្នាក់
ក្រុមរចនាសម្ព័ន្ធ Assur គឺជាចំនួនគូ kinematic ដែលរួមបញ្ចូលនៅក្នុងរង្វិលជុំបិទដែលបង្កើតឡើង ផ្ទៃក្នុង
គូ kinematic នៃក្រុម។ 1.4.3.
បញ្ជាទិញ
ក្រុម Assur កំណត់ចំនួនគូ kinematic ដែលវាត្រូវបានភ្ជាប់ទៅនឹងជំហរ យន្តការដំបូង ឬក្រុមផ្សេងទៀត។ 1.4.4.
ខ្សែក
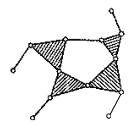
ក្រុមរចនាសម្ព័ន្ធ Assur ត្រូវបានគេហៅថា analogues នៃធាតុយន្តការដែលក្រុមនេះត្រូវបានភ្ជាប់។ ជាធម្មតាពួកវាត្រូវបានបង្ហាញជាបន្ទាត់ចំនុចដែលលាតសន្ធឹងពី CPs ឥតគិតថ្លៃ (សូមមើលរូបទី 1)។ បានផ្តល់គំនិតនេះ។ លំដាប់ក្រុមកំណត់លេខ ខ្សែដៃដែលវាត្រូវបានភ្ជាប់ទៅនឹងជំហរ យន្តការដំបូង ឬក្រុម Assur ផ្សេងទៀត។
- ចំនួននៃ CPs ទាបនៅក្នុងក្រុមរចនាសម្ព័ន្ធ។ ដោយសារលេខទាំងអស់ត្រូវតែជាចំនួនគត់ ចំនួនតំណភ្ជាប់នៅក្នុងក្រុមរចនាសម្ព័ន្ធត្រូវតែជាគូជានិច្ច ហើយចំនួននៃ CP ទាបត្រូវតែជាពហុគុណនៃ 3 ។ ១.៤.១. ក្រុម Assur
- ខ្សែសង្វាក់ kinematic រាបស្មើជាមួយនឹងការចល័តសូន្យ។ 1.4.2.
ថ្នាក់
ក្រុមរចនាសម្ព័ន្ធ Assur គឺជាចំនួនគូ kinematic ដែលរួមបញ្ចូលនៅក្នុងរង្វិលជុំបិទដែលបង្កើតឡើង ផ្ទៃក្នុង
គូ kinematic នៃក្រុម។ 1.4.3.
បញ្ជាទិញ
ក្រុម Assur កំណត់ចំនួនគូ kinematic ដែលវាត្រូវបានភ្ជាប់ទៅនឹងជំហរ យន្តការដំបូង ឬក្រុមផ្សេងទៀត។ 1.4.4.
ខ្សែក
ក្រុមរចនាសម្ព័ន្ធ Assur ត្រូវបានគេហៅថា analogues នៃធាតុយន្តការដែលក្រុមនេះត្រូវបានភ្ជាប់។ ជាធម្មតាពួកវាត្រូវបានបង្ហាញជាបន្ទាត់ចំនុចដែលលាតសន្ធឹងពី CPs ឥតគិតថ្លៃ (សូមមើលរូបទី 1)។ បានផ្តល់គំនិតនេះ។ លំដាប់ក្រុមកំណត់លេខ ខ្សែដៃដែលវាត្រូវបានភ្ជាប់ទៅនឹងជំហរ យន្តការដំបូង ឬក្រុម Assur ផ្សេងទៀត។ 
អង្ករ។ 1. ធានាក្រុមនាំមុខពីរដង។
តារាងទី 1 បង្ហាញឧទាហរណ៍នៃក្រុមរចនាសម្ព័ន្ធ Assur ថ្នាក់ II-VI ។ គូ kinematic ឥតគិតថ្លៃត្រូវបានសម្គាល់ដោយការនាំមុខចេញ - បន្ទាត់ចំនុច ដូចនៅក្នុងរូបភព។ ១.
តារាងទី 1 ។
| ក្រុម | បញ្ជាទិញ |
|||
| IIថ្នាក់ | ||||
| IIIថ្នាក់ |
|
|||
| IVថ្នាក់ | ||||
| វថ្នាក់ |
|
| ||
| VIថ្នាក់ |
|
| ||



2. ឧទាហរណ៍នៃការអនុវត្តការវិភាគរចនាសម្ព័ន្ធនៃយន្តការតំណប្រាំមួយ, ដ្យាក្រាម kinematic ដែលត្រូវបានបង្ហាញក្នុងរូប។ ២.
អង្ករ។ 2. ដ្យាក្រាម Kinematic នៃយន្តការ
២.១. ការជ្រើសរើសតំណថេរ- rack "0" ដែលអ័ក្សថេរនៃ hinges A និង D ត្រូវបានជួសជុល ក៏ដូចជាមគ្គុទ្ទេសក៍គ្រាប់រំកិល។ ២.២. យើងលេខ(លេខអារ៉ាប់) និងចាត់ថ្នាក់ផ្នែកផ្លាស់ទី។ដើម្បីភាពងាយស្រួលនៃការវិភាគថាមវន្តជាបន្តបន្ទាប់ វាត្រូវបានណែនាំឱ្យដាក់លេខតំណភ្ជាប់ជាបន្តបន្ទាប់ពីប្រភពថាមពល (តំណភ្ជាប់នាំមុខ) ទៅកាន់អ្នកប្រើប្រាស់ឆ្ងាយបំផុត។ នៅក្នុងយន្តការដែលកំពុងពិចារណាមានតំណភ្ជាប់ផ្លាស់ទីចំនួនប្រាំ: តំណភ្ជាប់ 1 - crank ធ្វើឱ្យចលនាបង្វិលជាមួយនឹងការបង្វិលពេញលេញនៃ 360 0; 2 និង 4 - កំណាត់តភ្ជាប់, អនុវត្តចលនាស្របគ្នានៃយន្តហោះជាមួយនឹងការបង្វិលទាក់ទងទៅនឹងអ័ក្សផ្លាស់ទី (ទីតាំងរបស់ MCS ផ្លាស់ប្តូរតាមពេលវេលា); តំណភ្ជាប់ 3 - ដៃរ៉ុក, អនុវត្តចលនាយោលទាក់ទងទៅនឹងអ័ក្សថេរ D; តំណ 5 - គ្រាប់រំកិល, អនុវត្តចលនាច្រាសមកវិញតាមបណ្តោយមគ្គុទ្ទេសក៍ថេរ។ ២.៣. យើងបែងចែកគូ kinematic(KP) ដែលកំណត់ចលនាទំនាក់ទំនងនៃតំណភ្ជាប់ដែលនៅជាប់គ្នា។ នៅក្នុងសៀវភៅសិក្សាមួយចំនួន គូ kinematic ត្រូវបានដាក់លេខដោយលេខរ៉ូម៉ាំង ឧទាហរណ៍ I, II, III, IV, V, VI និង VII ក្នុងរូបភាពទី 2, 3 និង 5។ ទោះយ៉ាងណាក៏ដោយ ជាមួយនឹងប្រូបាប៊ីលីតេទាបនៃកំហុស វាកាន់តែងាយស្រួលក្នុងការ បង្ហាញការចាត់ថ្នាក់របស់ KP ក្នុងទម្រង់តារាងទី 2 ដែលជំនួសឱ្យលេខរ៉ូម៉ាំង លេខប្រើអក្សរធំឡាតាំងជាមួយសន្ទស្សន៍ដែលបង្ហាញពីតំណភ្ជាប់ជាប់គ្នាដែលតភ្ជាប់ដោយគូ kinematic ដែលត្រូវគ្នា។តារាង 2 ។
| ចំនួននៃតំណភ្ជាប់ដែលនៅជាប់គ្នា។ | ឌីជីថល លេខកូដ KP | ប្រភេទនៃផ្ទាំងបញ្ជា | ការចាត់តាំងនៅក្នុងរូបភព។ 2, a, 2, b និងក្នុងអត្ថបទ |
|
| 2&4 (ឬ 3&4) | C 24 (ឬ C 34) |
|||
កន្លែងណា ន- ចំនួននៃផ្នែកផ្លាស់ទី ( ន = 5), ទំ 1
- ចំនួនគូ kinematic ទាបជាមួយនឹងការចល័តដូចគ្នា ( ទំ 1
=7
) មិនមានខ្ពស់ជាងនេះទេ (ជាមួយនឹងការចល័តពីរនៅលើយន្តហោះ) គូ kinematic នៅក្នុងយន្តការ, ទំ 2
=0
. ចំនួនសរុបនៃដឺក្រេនៃសេរីភាពនៃយន្តការគឺ 1, i.e. សម្រាប់ប្រតិបត្តិការនៃយន្តការ តំណភ្ជាប់បើកបរមួយគឺគ្រប់គ្រាន់ ដែលអាចត្រូវបានប្រើជា crank AB ។ ២.៥. យើងកំណត់ក្រុមរចនាសម្ព័ន្ធ Assur ។ដើម្បីកំណត់អត្តសញ្ញាណក្រុមរចនាសម្ព័ន្ធ Assur (ជាមួយនឹងចំនួនដឺក្រេនៃសេរីភាព W = 0) យើងបែងចែកយន្តការទៅជាម៉ូឌុលសាមញ្ញបំផុតដោយចាប់ផ្តើមពីចម្ងាយឆ្ងាយបំផុតពីតំណនាំមុខ។ មុននេះ វាត្រូវបានណែនាំឱ្យបង្ហាញគូដែលរួមបញ្ចូលគ្នានៅលើដ្យាក្រាម kinematic (សូមមើលរូបទី 2) នៅចំណុចមួយ ជាពិសេសរវាងតំណភ្ជាប់ 2, 3 និង 4 ដោយឡែកពីគ្នា ឧទាហរណ៍ដូចដែលបានបង្ហាញក្នុងរូបភព។ 3, a ឬក្នុងរូប។ 3, ខ. គ្រោងការណ៍ទាំងពីរនេះនិយាយជាទូទៅគឺត្រូវគ្នាទៅនឹងយន្តការផ្សេងគ្នាដែលខុសគ្នាទាំងនៅក្នុង kinematics នៃតំណភ្ជាប់ 4 និង 5 (ប្រសិនបើអ័ក្សនៃ hinges តភ្ជាប់តំណភ្ជាប់ 2, 3 និង 4 មិនត្រូវបានតម្រឹមនៅក្នុងលំហ) និងនៅក្នុងកងកម្លាំងបញ្ជូនតាមរយៈ kinematic គូរវាងតំណភ្ជាប់ទី 2 និងទី 3 ។ ប្រសិនបើយើងបញ្ចូលគ្នានូវអ័ក្សនៃគូ kinematic បង្វិលដែលភ្ជាប់តំណភ្ជាប់ដែលបានចង្អុលបង្ហាញ នោះលក្ខខណ្ឌ kinematic នឹងត្រូវបានកំណត់ដោយមិនច្បាស់លាស់ ប៉ុន្តែកម្លាំងបញ្ជូនអាចផ្លាស់ប្តូរដោយសារតែរូបរាងនៃកម្លាំងអកម្មដែលមិនចូលរួមក្នុង ការផ្ទេរថាមពលរវាងតំណភ្ជាប់ដែលនៅជាប់គ្នាដែលបានតភ្ជាប់ដោយសារតែការពិតដែលថានៅក្នុងពេលនីមួយៗនៅក្នុងពេលវេលាដែលពួកគេត្រូវបានដឹកនាំ orthogonally ទៅល្បឿននៃចលនានៃអ័ក្សទាំងនេះ (ផលិតផលមាត្រដ្ឋាននៃវ៉ិចទ័រ orthogonal គឺស្មើនឹង 0!) ។ 

អង្ករ។ 3. គ្រោងការណ៍ kinematic ដែលអាចធ្វើទៅបាននៃយន្តការ។
ដ្យាក្រាម Kinematic ក្នុងរូប។ 3 ជាមួយនឹងរូបភាពនៃដំបងតភ្ជាប់ 2 ឬដៃ rocker 3 ក្នុងទម្រង់ជាត្រីកោណរឹងអាចនាំឱ្យមានកំហុសក្នុងការបែងចែកយន្តការប្រសិនបើវាត្រូវបានចាត់ថ្នាក់ជាថ្នាក់ 3 (យោងទៅតាមចំនួនជ្រុងនៃវណ្ឌវង្កបិទជិតបំផុត) និងលំដាប់។ 3 (យោងទៅតាមចំនួនអ្នកដឹកនាំដែលភ្ជាប់ក្រុមជាមួយនឹងតំណភ្ជាប់ឈានមុខគេ (យន្តការដំបូង) និងជំហរ។ ដើម្បីជៀសវាងកំហុស វាចាំបាច់ក្នុងការបែងចែកយន្តការទៅជា ប្រូតូហ្សូម៉ូឌុល ការផ្តាច់ដែលមិនរំខានដល់ប្រតិបត្តិការនៃផ្នែកដែលនៅសល់នៃយន្តការ។ ដូច្នេះ ការជ្រើសរើសត្រូវតែចាប់ផ្តើមជាមួយក្រុម Assur នាំមុខពីរនៃថ្នាក់ 1 ដែលបង្ហាញក្នុងរូប។ 1. ក្រុម Assur ឆ្ងាយបំផុតត្រូវបានបង្កើតឡើងដោយដំបងតភ្ជាប់ 4 និងគ្រាប់រំកិល 5 ជាមួយនឹងគូ kinematic បី: C 24, E 45, 5&0 នៅក្នុងរូបភព។ 3, a ឬ C 34, E 45, 5&0 ក្នុងរូប។ 3, ខ ដែលក្នុងនោះគូ kinematic ពីរជារបស់ប្រភេទ “1c” និងមួយទៅប្រភេទ “1p” (5&0)។ ការនាំមុខនៅលើប្រអប់លេខ S 24 និង 5&0 (រូបភាព 3, ក) ឬ S 34 និង 5&0 (រូបភាព 3, ខ) ភ្ជាប់ក្រុមរចនាសម្ព័ន្ធ Assur (ប្រភេទ GDP) នេះជាមួយនឹងដំបងតភ្ជាប់ 2 (ដៃរ៉ុក 3 នៅក្នុងរូបភាពទី 3, b) និង strut 0. ចំនួនដឺក្រេនៃសេរីភាព (កម្រិតនៃការចល័ត) នៃផ្នែកដែលនៅសល់ (តំណភ្ជាប់ 1, 2 និង 3) នៅតែស្មើគ្នា វ= 1 ដូចនៅក្នុងយន្តការដើម។ នេះបញ្ជាក់ថាក្រុមរចនាសម្ព័ន្ធដំបូងត្រូវបានកំណត់យ៉ាងត្រឹមត្រូវ។ បន្ទាប់មកទៀត យើងបំបែកក្រុមទីពីរ (តំណភ្ជាប់ទី 2 និងទី 3) ជាមួយនឹងគូ kinematic បីនៃប្រភេទ "1v" (B 12, C 23, D 03, Assur structural group of type VBB) ។ កម្រិតនៃការចល័តនៃផ្នែកដែលនៅសល់បន្ទាប់ពីនេះ - យន្តការដំបូងជាមួយគូ kinematic A 01 - នៅតែស្មើនឹង W = 1 ។ នៅក្នុងរូបភព។ រូបភាពទី 4 បង្ហាញក្រុម Assur ដាច់ដោយឡែក។ សញ្ញាព្រួញសម្រាប់ក្រុមនីមួយៗក្នុងរូប។ រូបភាពទី 4 បង្ហាញពី "ការនាំមុខ" ដែលក្រុមត្រូវបានភ្ជាប់ទៅផ្នែកដែលនៅសល់នៃយន្តការដែលមានតំណភ្ជាប់ drive 1 ("យន្តការដំបូង") និង rack 0 ។ លើសពីនេះ ការភ្ជាប់បែបនេះត្រូវបានសន្មត់តាមរយៈការណែនាំនៃគូ kinematic ជាកម្មសិទ្ធិរបស់ក្រុម Assur ដែលបានភ្ជាប់ទៅក្នុងតួនៃ rack ឬយន្តការម្ចាស់ជំនួយ ដែលវានឹងទទួលបានថាមពលដើម្បីផ្លាស់ទី និងអនុវត្តប្រតិបត្តិការបច្ចេកវិទ្យា។
![]()
![]()
អង្ករ។ 4. ក្រុមរចនាសម្ព័ន្ធនៃ Assur ។ យោងទៅតាម Artobolevsky I.I. ថ្នាក់នៃក្រុមត្រូវបានកំណត់ដោយចំនួនគូ kinematic ដែលបង្កើតជាវណ្ឌវង្កបិទជិតបំផុតនៃក្រុម។ លំដាប់នៃក្រុមត្រូវបានកំណត់ដោយចំនួនធាតុឥតគិតថ្លៃនៃគូ kinematic ដែលក្រុមអាចត្រូវបានភ្ជាប់ទៅនឹងយន្តការដំបូងនិង rack ។ ក្រុមរចនាសម្ព័ន្ធដែលអាចបំបែកបានទាំងពីរជាកម្មសិទ្ធិរបស់លំដាប់ទី 2 និង 1 ថ្នាក់ យន្តការទាំងមូលជាកម្មសិទ្ធិរបស់ថ្នាក់តែមួយ។ ២.៦. លុបបំបាត់ការតភ្ជាប់ដែលលែងប្រើ។ចាប់តាំងពីការសន្មត់នៃចលនាស្របគ្នានៃយន្តហោះនៃតំណភ្ជាប់សំដៅទៅលើយន្តការដ៏ល្អមួយ ហើយតាមពិតទៅ ដោយសារតែភាពមិនត្រឹមត្រូវក្នុងការផលិតធាតុ ជាចម្បង ភាពមិនស្មើគ្នានៃអ័ក្សនៃយន្តហោះនៃចលនានៃតំណភ្ជាប់ និងមិនមែន -parallelism នៃអ័ក្សនៃគូ kinematic បង្វិល យន្តការត្រូវបានបំប្លែងទៅជា spatial មួយ ចំនួនដឺក្រេនៃសេរីភាពសម្រាប់យន្តការពិតប្រាកដមួយគួរតែត្រូវបានគណនាតាមរូបមន្ត Malyshev ។ ដោយគិតគូរពីគូ kinematic ពីតារាងទី 2 យើងទទួលបាន៖ យន្តការនេះមាន 6 ការតភ្ជាប់ដែលលែងត្រូវការតទៅទៀត ដែលអាចត្រូវបានលុបចោលដោយការជំនួសគូ kinematic ទាបជាមួយនឹងគូដែលខ្ពស់ជាង។ សម្រាប់គ្រោងការណ៍ដែលពេញចិត្តជាងនេះនៅក្នុងរូបភាពទី 1 ពីចំណុចនៃទិដ្ឋភាពនៃលំហូរថាមពល។ 3 និងជម្រើសមួយក្នុងចំណោមជម្រើសសម្រាប់ការលុបបំបាត់ការតភ្ជាប់ដែលលែងត្រូវការគ្នាត្រូវបានបង្ហាញក្នុងតារាងទី 3 និងរូបភព។ ៥.
តារាងទី 3 ។
| ចំនួននៃតំណភ្ជាប់ដែលនៅជាប់គ្នា។ | ប្រភេទនៃប្រអប់លេខសម្រាប់ PPD | ប្រភេទនៃផ្ទាំងបញ្ជាសម្រាប់ spatial ចលនា | ការចាត់តាំងនៅក្នុងរូបភព។ 2a និង 2b |
|
អាចយល់ពីសារៈសំខាន់នៃវប្បធម៌ជាទម្រង់នៃអត្ថិភាពរបស់មនុស្ស និងត្រូវបានដឹកនាំក្នុងសកម្មភាពរបស់គាត់ដោយគោលការណ៍ទំនើបនៃការអត់ឱន។
ការពិពណ៌នាផលិតផល
យន្តការដង្កៀប។ ផ្នែកទី 1
យន្តការដងថ្លឹងរួមមានយន្តការដែលមានតំណភ្ជាប់ដែលអនុវត្តចលនាបង្វិល ការបកប្រែ ឬចលនាស្របគ្នានៃយន្តហោះ។ យន្តការទាំងនេះត្រូវបានសម្គាល់ដោយភាពសាមញ្ញ ប្រសិទ្ធភាពខ្ពស់ និងសមត្ថភាពផ្ទុកខ្ពស់ ទោះបីជាយ៉ាងណាក៏ដោយ ពួកវាមិនអាចផ្តល់នូវច្បាប់នៃចលនានៃតំណភ្ជាប់ដែលបានជំរុញនោះទេ ដែលកម្រិតមួយចំនួននៃការប្រើប្រាស់របស់ពួកគេនៅក្នុងបច្ចេកវិទ្យា។
ប្រភេទនៃយន្តការដងថ្លឹងខាងក្រោមត្រូវបានប្រើប្រាស់យ៉ាងទូលំទូលាយនៅក្នុងឧបករណ៍បច្ចេកវិជ្ជា៖ យន្តការបួនរបារ យន្តការ crank យន្តការ rocker ។ សូមក្រឡេកមើលឧទាហរណ៍ និងលក្ខណៈពិសេសនៃការរចនានៃយន្តការដងថ្លឹង។
យន្តការបួនជ្រុង
យន្ដការរបារបួនដែលជាប់នឹងគ្នា ត្រូវបានបែងចែកជាបីប្រភេទ៖ ពីរជាន់ ដែលក្នុងនោះតំណភ្ជាប់បើកបរ និងជំរុញអាចធ្វើឱ្យមានបដិវត្តន៍ពេញលេញ (សូមមើលរូបទី 1a) crank-rocker ដែលក្នុងនោះតំណភ្ជាប់ឈានមុខគេ។ crank, rotates, and driven rocker make a rocking motion (សូមមើលរូបភព។ 1b) និង rocker arms ពីរ, in which the drives and drived link links ass a rocking motion (សូមមើលរូប 1c) ។
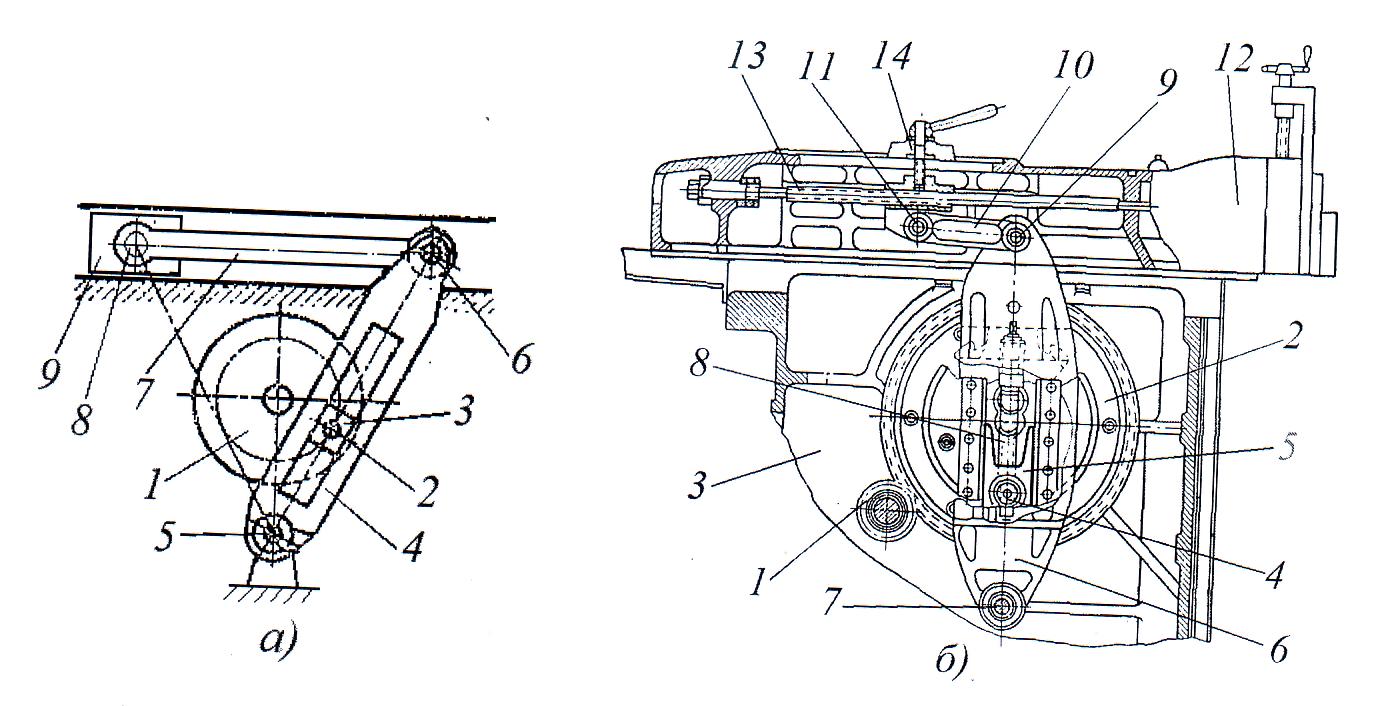
ឧទាហរណ៏នៃយន្តការ crank ពីរគឺជាយន្តការសម្រាប់ការផ្ទេរដុំដែកជ្រុងវែងមួយពី rack ទៅ roller conveyor នៃឧបករណ៍បច្ចេកវិទ្យាដែលជាដ្យាក្រាមរចនាដែលត្រូវបានបង្ហាញនៅក្នុងរូបភព។ 2. វាមានប្រដាប់ប្រដារ 4 កាំរស្មី 1 និង 2 ដែលដាក់នៅលើ shafts 3 និង hingedly ភ្ជាប់ទៅគ្នាទៅវិញទៅមកដោយមធ្យោបាយនៃ axes 5 ជាមួយ 4 cradles 4 ដែលក្នុងនោះ workpiece 6 ត្រូវបានដាក់នៅពេលផ្ទេរ ដូច្នេះបង្កើតជា crank 4 two-crank យន្តការ។ ក្នុងករណីនេះអ័ក្ស 3 នៅលើទ្រនាប់រអិលមានទីតាំងនៅលំនៅដ្ឋាន 7 និង 8 ដែលត្រូវបានម៉ោននៅលើស៊ុមធម្មតា 10 ដោយមធ្យោបាយតង្កៀប 9 ។

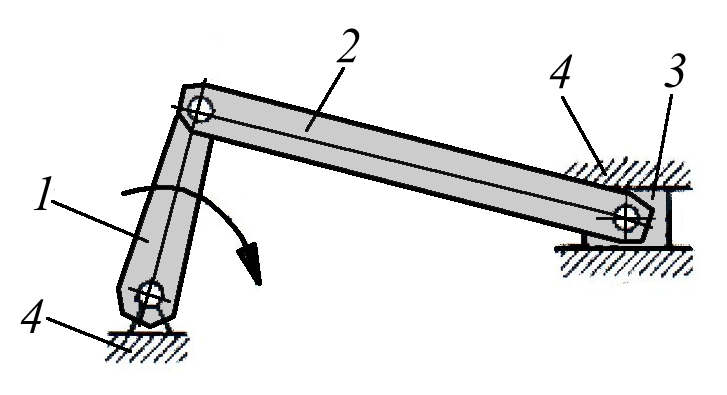
អ្នកតំណាងមួយទៀតនៃយន្តការបួនជ្រុងគឺជាយន្តការទ្វេរដង (សូមមើលរូបភាពទី 3) ដែលត្រូវបានប្រើជាក្បួនដើម្បីផ្លាស់ប្តូរ (បង្កើន បន្ថយ) មុំយោលនៃដៃរ៉ុកដែលជំរុញ ឬផ្លាស់ប្តូរកម្លាំងដែលបានបង្កើតនៅលើវា។ .
នៅក្នុងរូបភព។ ៣ កបង្ហាញយន្តការរ៉ុកទ្វេដែលការរចនាដែល (សមាមាត្រប្រវែងនិងទីតាំងដែលទាក់ទងនៃអាវុធរ៉ុក 1 និង 3) អនុញ្ញាតឱ្យអ្នកបង្កើនមុំយោល β α ដៃរ៉ុកនាំមុខ 1. នៅក្នុងរូបភព។ ៣ ខយន្តការរ៉ុកទ្វេត្រូវបានបង្ហាញ ការរចនាដែល (សមាមាត្រប្រវែងនិងទីតាំងទាក់ទងនៃដៃរ៉ុក 1 និង 3) ធ្វើឱ្យវាអាចធ្វើទៅបានដើម្បីកាត់បន្ថយមុំយោល β ដៃរ៉ុកដែលជំរុញ 3 ទាក់ទងទៅនឹងមុំយោល។ α ដៃរ៉ុកនាំមុខ 1. ប្រសិនបើនៅក្នុងយន្តការដែលបង្ហាញក្នុងរូប។ ៣ កតំណភ្ជាប់ឈានមុខគេនឹងជាតំណ 3 បង្វិលជាមួយនឹងបដិវត្តន៍ពេញលេញ ហើយនៅក្នុងយន្តការដែលបង្ហាញក្នុងរូបភព។ ៣ ខតំណភ្ជាប់បើកបរ 1 របស់វានឹងធ្វើឱ្យមានបដិវត្តន៍ពេញលេញ បន្ទាប់មកយន្តការទ្វេរដងទាំងនេះនឹងប្រែទៅជាយន្តការ crank-rocker ។ យន្តការទាំងនេះកម្រត្រូវបានគេប្រើជាឧបករណ៍បំលែងថាមពលរបស់ម៉ាស៊ីន និងឧបករណ៍ព្រោះវាអាចដំណើរការបានតែនៅមុំយោលមានកំណត់ (60 - 90 ដឺក្រេ) ដោយសារតែការកើនឡើងនៃការបាត់បង់នៅពេលបញ្ជូនកម្លាំងពីតំណបើកបរទៅតំណជំរុញ ជាមួយនឹងការកើនឡើង។ មុំយោលនៃ cranks ។ យន្តការបែបនេះជាធម្មតាត្រូវបានគេប្រើជាឧបករណ៍ជំនួយ ដំណើរការក្នុងល្បឿនទាប និងបន្ទុក។ ប្រភេទនៃយន្តការនេះត្រូវបានគេប្រើជាញឹកញាប់ជា actuator នៅក្នុងប្រភេទផ្សេងៗនៃ tilters ។
 អង្ករ។ 4. ទុយោសម្រាប់បង្វិលតុរបស់ម៉ាស៊ីនផ្សិត។
អង្ករ។ 4. ទុយោសម្រាប់បង្វិលតុរបស់ម៉ាស៊ីនផ្សិត។
នៅក្នុងរូបភព។ រូបភាពទី 4 បង្ហាញពីយន្តការ actuator នៃ tilter ដែលធ្វើឡើងយោងទៅតាមការរចនារបារបួនដែលបានបញ្ជាក់ដែលមានដៃរ៉ុក 6 ដែលត្រូវបានម៉ោនយ៉ាងតឹងរឹងនៅលើអ័ក្សដ្រាយ 3 ដែលត្រូវបានតំឡើងនៅលើទ្រនាប់រអិល 2 នៅលើស៊ុម 1 និងជំរុញមួយ។ ដៃរ៉ុក 7 ត្រូវបានម៉ោនដោយទ្រនិចនៅលើស៊ុម 1 ដោយមធ្យោបាយនៃអ័ក្ស 5 និងទ្រនាប់រុញ 4 ក្នុងករណីនេះចុងទល់មុខនៃកំណាត់ទី 6 និង 7 តាមរយៈអ័ក្ស 8 និង 9 ត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងដំបងតភ្ជាប់ 10 ។ នៅលើ racks ពីរ 8 ជាមួយនឹង transverse crossbeam 11 ត្រូវបានជួសជុលយ៉ាងតឹងរ៉ឹងនៅពេលដែលអ័ក្សដ្រាយ 3 បង្វិល (ដ្រាយនៃ tilter actuator មិនត្រូវបានបង្ហាញ) តាមទ្រនិចនាឡិកាដៃរ៉ុកនាំមុខ 6 ក៏បត់ក្នុងទិសដៅដូចគ្នាហើយជាមួយវាទាំងមូល។ យន្តការនៃ hinge តំណបួន។ ជម្រើសនៃអ័ក្សយោល និងប្រវែងនៃដៃរ៉ុក 6 និង 7 ត្រូវបានបង្ហាញនៅក្នុងរូបភព។ 4, នៅពេលដែលបង្វិល, អនុញ្ញាតឱ្យវេទិកា 11 ត្រូវបានបង្វិលនៅមុំមួយ, ដែលជាពិសេសត្រូវបានប្រើដើម្បី tilt តារាងនៃម៉ាស៊ីន molding ។ 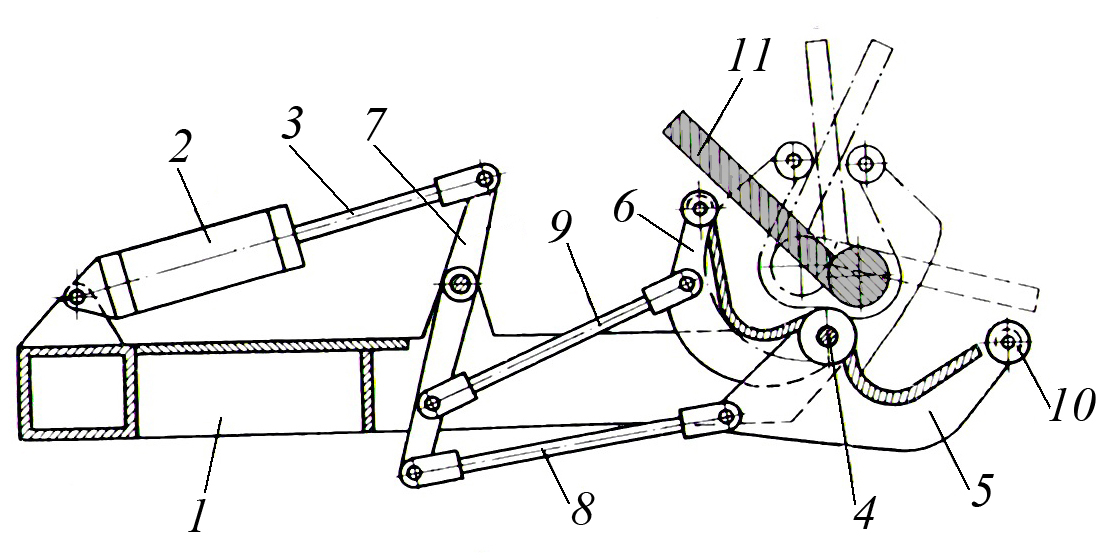
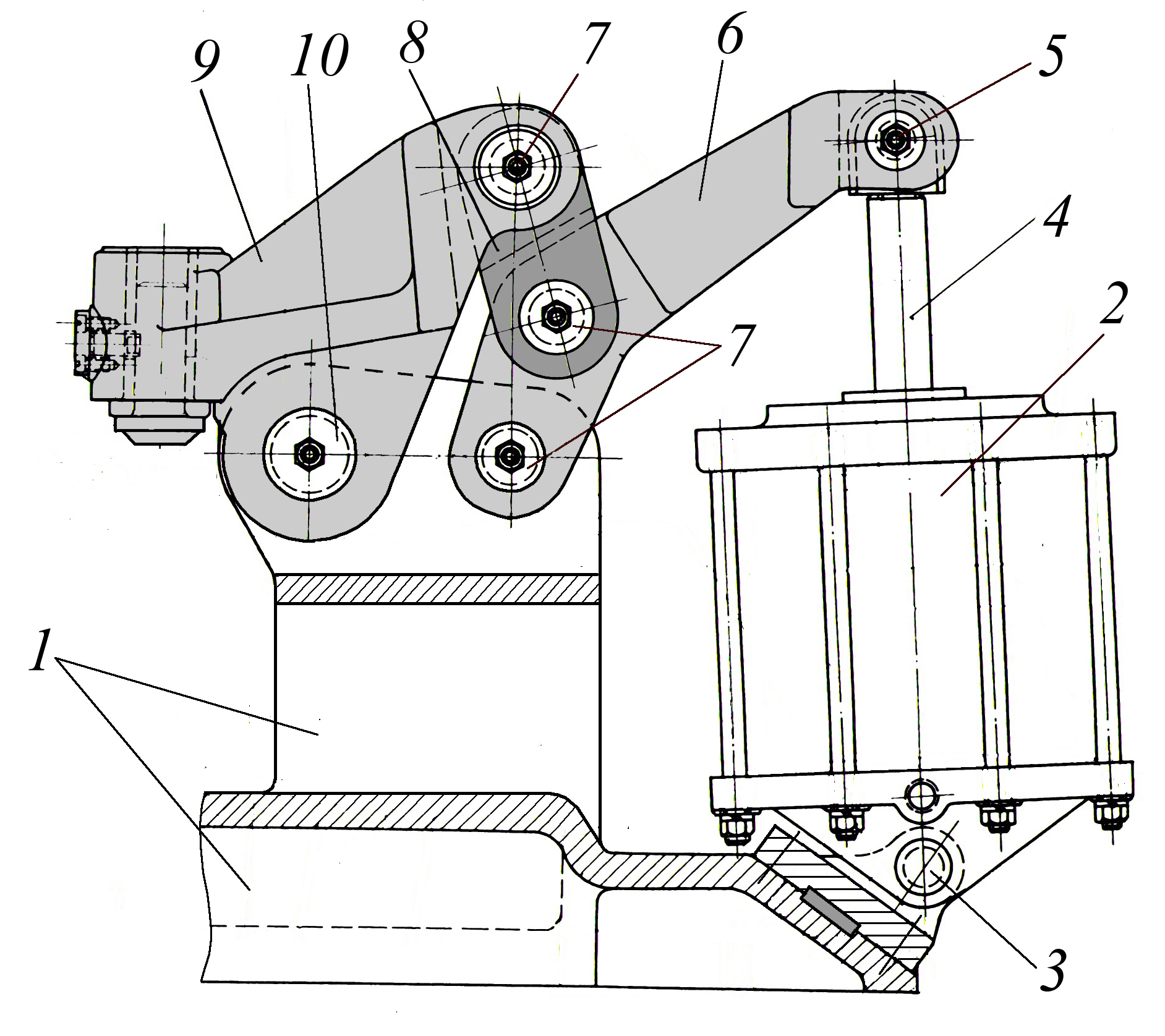
អង្ករ។ 5 ការរចនានៃទីតាំង welding, jaws rotary ដែលត្រូវបានជំរុញដៃ rocker នៃ articulated បួន-bars
រូបភាពទី 5 បង្ហាញពីការរចនានៃទីតាំងផ្សារដែក បង្វិលថ្គាម
ដែលត្រូវបានជំរុញដៃ rocker នៃតំណភ្ជាប់ចំនួនបួនដែលបានបញ្ជាក់ដែលមានដៃ rocker ជំរុញទូទៅ។ វាមានផ្ទុកនៅលើស៊ុម 1 ស៊ីឡាំង pneumatic ដ្រាយ 2 ដំបង 3 ដែលដោយមធ្យោបាយនៃដងថ្លឹងប្រដាប់អាវុធពីរដង 7 ដែលជាដៃជំរុញដែលជាដៃរ៉ុកនាំមុខគេនៃតំណភ្ជាប់បួនដែលភ្ជាប់គ្នាពីរដែលមានកំណាត់ 8 ។ និង 9, ភ្ជាប់យ៉ាងសំខាន់ទៅនឹង jaws rotary 5 និង 6 ដែលបានម៉ោននៅលើអ័ក្សធម្មតា 4 ដែលត្រូវបានជំរុញដោយដៃ rocker នៃតំណភ្ជាប់ទាំងបួននេះ។
tilter ដំណើរការដូចខាងក្រោម។ បន្ទាប់ពីបញ្ចប់ការផ្សារថ្នេរទី 1 នៃផលិតផល 11 ពាក្យបញ្ជាត្រូវបានផ្តល់ឱ្យដើម្បីបើកស៊ីឡាំង pneumatic 2 ដំបង 3 ដែលត្រូវបានដកចេញហើយនាំយកថ្គាមបង្វិល 5 និង 6 រួមគ្នាខណៈពេលដែលដំឡើងផលិតផល welded 11 នៅក្នុងមួយ។ ទីតាំងបញ្ឈរ (នៅពេលនេះ rollers គាំទ្រ 10 រមៀលតាមបណ្តោយធ្នើនៃផលិតផល) ។ ជាលទ្ធផលនៃចំណុចកណ្តាលនៃទំនាញនៃផលិតផល welded 11 ផ្លាស់ទីទៅផ្នែកម្ខាងនៃ prism ការគាំទ្រ (មិនបានបង្ហាញនៅក្នុងរូបភាពទី 5) និងជាមួយនឹងការបើកជាបន្តបន្ទាប់នៃ levers 5 និង 6 ដែលកើតឡើងនៅពេលដែលដំបង 3 នៃស៊ីឡាំង pneumatic 2 ត្រូវបានពង្រីក, ផលិតផលត្រូវបានដាក់នៅក្នុងទីតាំងងាយស្រួលសម្រាប់ welding ថ្នេរទីពីរ។
រូបភាពទី 6 ការរចនានៃយន្តការតោងនៃម៉ាស៊ីនកិនកណ្តាលដែលមានរបារបួនជ្រុងពីរ។
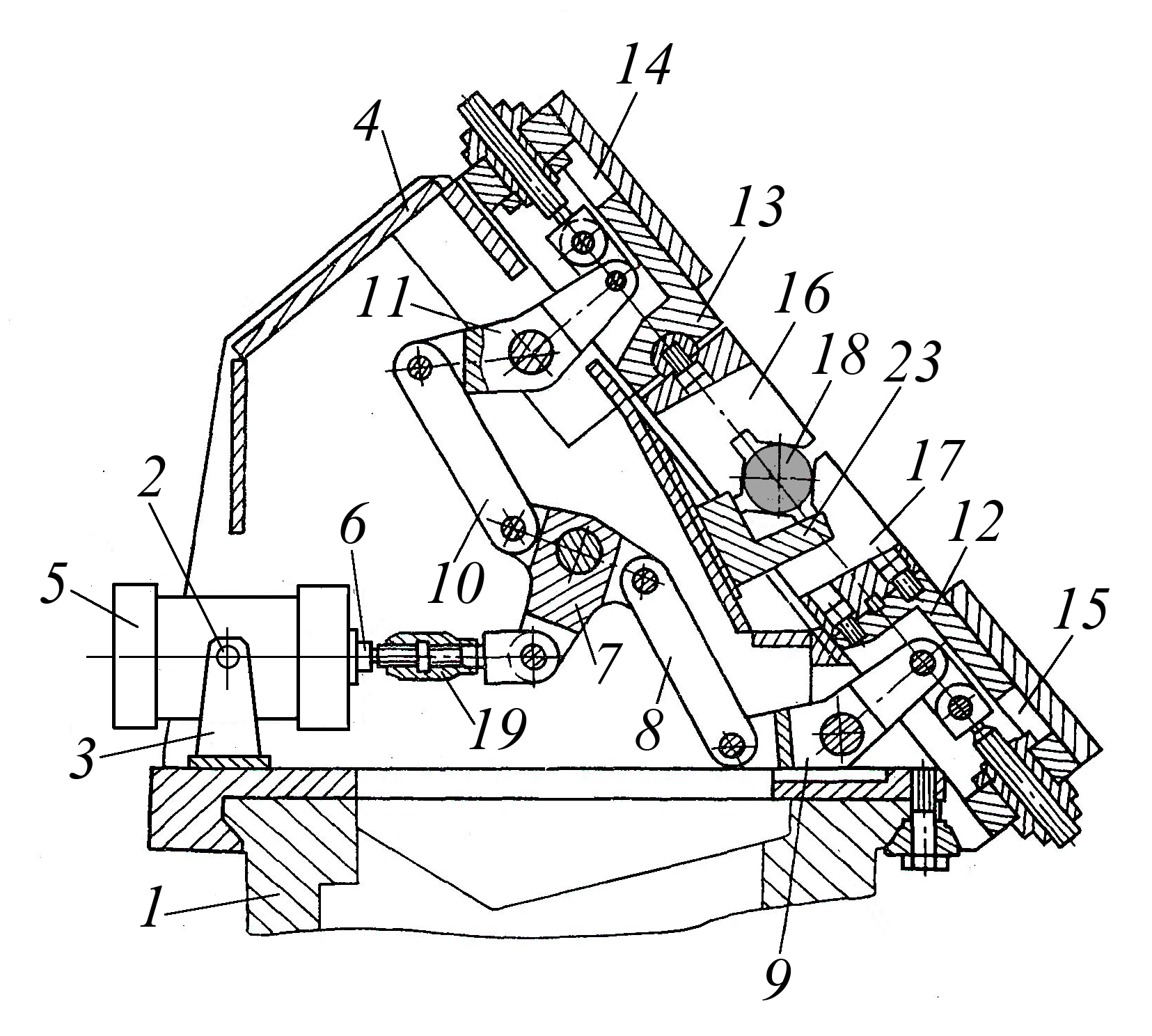
រូបភាពទី 6 បង្ហាញពីការរចនានៃយន្តការតោងរបស់ម៉ាស៊ីនកិន-កណ្តាល ដែលមានរបារបួនជ្រុងដែលភ្ជាប់គ្នានាំមុខដែលជាដងថ្លឹងដៃបី ខណៈដែលដៃនាំមុខនៃក្រោយត្រូវបានភ្ជាប់ទៅនឹងដំបងរបស់ដ្រាយ។ ស៊ីឡាំង pneumatic និងដៃ rocker ជំរុញនៃរបារបួនត្រូវបានតភ្ជាប់ទៅ prisms ការគៀបផ្លាស់ទីជាលំដាប់។ វាមានលំនៅ 4 ដែលបានម៉ោននៅលើស៊ុម 1 នៃម៉ាស៊ីនដែលក្នុងនោះស៊ីឡាំង pneumatic ដ្រាយ 5 ជាមួយនឹងដំបង 6 ត្រូវបានម៉ោនដោយ hingedly ដោយមធ្យោបាយនៃអ័ក្ស 2 និងតង្កៀប 3, ក្រោយមកទៀតដោយប្រើដំបង 19 និងដៃបី ដងថ្លឹងលេខ 7 កំណាត់មធ្យម 8 និង 10 និងដៃពីរ 9 និង 11 ត្រូវបានភ្ជាប់ដោយហ៊ីងទៅនឹងគ្រាប់រំកិល 12 និង 13 ដែលត្រូវបានដំឡើងនៅក្នុងមគ្គុទ្ទេសក៍ 14 និង 15 នៃលំនៅដ្ឋាន 4. នៅលើគ្រាប់រំកិល 12 និង 13, ព្រីស 16 និង 17 ត្រូវបានជួសជុលដែលរវាងលំយោលមូលដ្ឋាន 23 ត្រូវបានដំឡើង។
យន្តការតោងដំណើរការដូចខាងក្រោម។ ដើម្បីតោងដុំការងារ (កំណាត់ដែលត្រូវកាត់តម្រឹម និងចំកណ្តាល) ដែលបានដំឡើងជាមុននៅលើលំយោលមូលដ្ឋាន 23 ខ្យល់ដែលបានបង្ហាប់ត្រូវបានផ្គត់ផ្គង់ទៅប្រហោងដំបងនៃស៊ីឡាំងខ្យល់ 5 ខណៈដែលដំបងរបស់វា 6 ដកថយ និងបង្វិលតាមទ្រនិចនាឡិកាដៃចង្កូតបី 7 ដែលតាមរយៈកំណាត់មធ្យម 8 និង 10 ដៃចង្កូតទ្វេ 9 និង 11 នាំគ្រាប់រំកិល 12 និង 13 រួមជាមួយនឹងព្រីស 16 និង 17 ភ្ជាប់ជាមួយពួកវាដែលតោងផ្នែកការងារ 18 ។ ដើម្បីបញ្ចេញស្នាដៃដែលបានដំណើរការ ខ្យល់ដែលបានបង្ហាប់ត្រូវបានផ្គត់ផ្គង់។ ទៅបែហោងធ្មែញ piston នៃស៊ីឡាំង pneumatic 5 ខណៈពេលដែលដំបងរបស់វា 6 លាតសន្ធឹងនិងដោយមធ្យោបាយនៃ rod 19 និងយន្តការ lever ត្រឡប់គ្រាប់រំកិល 12 និង 13 ជាមួយនឹង prisms 16 និង 17 ទៅទីតាំងដើមរបស់ពួកគេខណៈពេលដែលបញ្ចេញ workpiece ដែលបានដំណើរការ។
រូបភាពទី 7 ការរចនានៃ actuator នៃការចុចកុំព្យូទ័របន្ទះ។
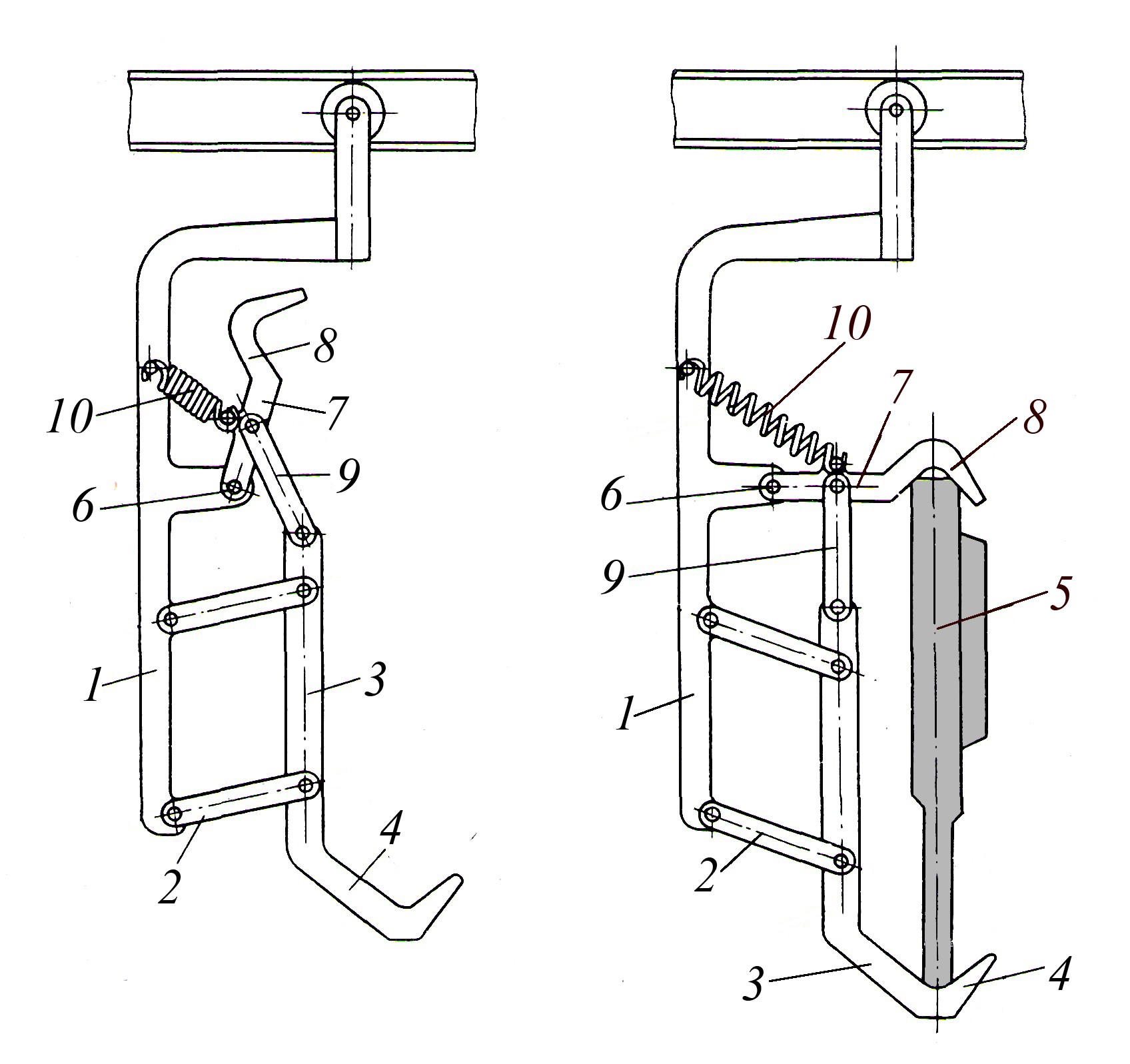
រូបភាពទី 7 បង្ហាញពីការរចនានៃការចុចកុំព្យូទ័រលើតុជាមួយ pneumomechanical drive ដែលជាឧបករណ៍រំញោចដែលជាយន្តការទ្វេរដង។ វាមានស៊ីឡាំង pneumatic ថាមពល 2 ដែលត្រូវបានម៉ោននៅលើស៊ុម 1 តាមរយៈអ័ក្ស 3 ដំបងដែល 4 ត្រូវបានភ្ជាប់យ៉ាងសំខាន់តាមរយៈអ័ក្ស 5 ទៅកាន់ដៃ rocker 6 ហើយក្រោយមកទៀតត្រូវបានភ្ជាប់ដោយទ្រនិចទៅនឹងដំបង 8 តាមរយៈអ័ក្ស 7 ដែល នៅក្នុងវេនត្រូវបានភ្ជាប់តាមអ័ក្ស 7 ទៅនឹងដងថ្លឹងប្រដាប់អាវុធទ្វេរដង 9 ដែលបានម៉ោនដោយប្រើអ័ក្ស 10 នៅលើស៊ុម 1. ការរចនានៃ actuator នេះជំរុញដោយស៊ីឡាំង pneumatic ធ្វើឱ្យវាអាចធ្វើទៅបានដើម្បីបង្កើតឧបករណ៍ចុចកុំព្យូទ័របន្ទះតូចមួយដែលមានសមត្ថភាពអភិវឌ្ឍ។ កម្លាំងសំខាន់ៗ។
អង្ករ។ 8. ការរចនានៃការព្យួរទំនិញ conveyor បានធ្វើឡើងនៅលើមូលដ្ឋាន
របារបួនជ្រុង
នៅក្នុងរូបភព។ រូបភាពទី 8 បង្ហាញពីការរចនានៃការព្យួរទំនិញ conveyor ដែលជា actuator ដែលមាន hinge បួនរបារ។ ការរចនានេះធានានូវការជួសជុល និងការគៀបនៃផ្នែកដែលបានដឹកជញ្ជូនយ៉ាងសាមញ្ញ និងអាចទុកចិត្តបាន ក៏ដូចជាការដំឡើង និងការដកយកចេញរបស់វា។ វាមានជំហរថេរ 1 ដែលត្រូវបានតំឡើងនៅលើរទេះរុញហើយភ្ជាប់ទៅវាដោយប្រើដៃរ៉ុកដែលមានប្រវែងស្មើគ្នា 2 ដំបង 3 ជាមួយនឹងធ្នើសម្រាប់ផ្ទុក 4 សម្រាប់ដំឡើងផ្នែកដឹកជញ្ជូន 5 ក៏ដូចជាដងថ្លឹង 7 ជាមួយ។ ធ្នើដាក់សំពាធ 8 ភ្ជាប់ដោយទ្រនិចទៅនឹងទ្រនិចថេរ 1 ដោយមធ្យោបាយនៃអ័ក្ស 6 និងដោយដំបង 9 វាត្រូវបានភ្ជាប់ជាស្នូលទៅនឹងដំបង 3។ ក្នុងករណីនេះ និទាឃរដូវផ្នែកបន្ថែម 10 ត្រូវបានតំឡើងនៅចន្លោះបង្គោលថេរ។ 1 និងដងថ្លឹង 7 ។
ការព្យួរដំណើរការដូចខាងក្រោម។ នៅក្នុងទីតាំងដំបូង ដំបងទី 3 ដែលមានធ្នើផ្ទុកបន្ទុក 4 និងដងថ្លឹង 7 ជាមួយនឹងធ្នើដាក់សម្ពាធ 8 ស្ថិតនៅទីតាំងខាងលើ ហើយកុំជ្រៀតជ្រែកក្នុងការដំឡើងផ្នែកទី 5 នៅលើការព្យួរ។ នៅក្នុងទីតាំងនេះផ្នែកទី 5 ត្រូវបានតំឡើងនៅលើធ្នើរផ្ទុកបន្ទុក 4 ខណៈពេលដែលស្ថិតនៅក្រោមឥទ្ធិពលនៃទំងន់របស់វា lever 7, rod 9 និង rod 3 ដែលយកឈ្នះកម្លាំងនៃនិទាឃរដូវ 10 ត្រូវបានទម្លាក់ចុះ។ ចាប់តាំងពីធ្នើរតោង 8 បង្វិលលើកាំធំជាងចំណុចតភ្ជាប់រវាងដំបង 3 និងដៃរ៉ុក 2 ក្នុងពេលដំណាលគ្នានោះវានឹងធ្វើដំណើរចម្ងាយឆ្ងាយជាងសមសម្រាប់ផ្ទុកបន្ទុក 4 ដូច្នេះផ្នែកទី 5 ត្រូវបានចុចដោយ ការតោងធ្នើរ 8 ទៅធ្នើរផ្ទុកបន្ទុក 4. សម្រាប់ការផ្ទុកផ្នែករបស់វាត្រូវបានលើកឡើងដោយបរិមាណដាច់សរសៃឈាមខួរក្បាលនៃធ្នើផ្ទុក 4 និងធ្នើដាក់សម្ពាធ 8 រួមជាមួយនឹងដងថ្លឹង 7 នៅក្រោមសកម្មភាពនៃនិទាឃរដូវ 10 ត្រឡប់ទៅ ទីតាំងចាប់ផ្តើមខាងលើដូច្នេះបញ្ចេញផ្នែក។
យន្តការ crank
នៃគ្រប់ប្រភេទនៃយន្តការដងថ្លឹង យន្តការ crank គឺរីករាលដាលបំផុតនៅក្នុងបច្ចេកវិទ្យាដោយសារតែភាពសាមញ្ញនៃ kinematics ដែលធ្វើឱ្យវាមានភាពងាយស្រួលក្នុងការបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ ដែលអនុញ្ញាតឱ្យប្រើប្រាស់របស់ពួកគេនៅក្នុង actuators នៃឧបករណ៍បច្ចេកវិទ្យា ឧទាហរណ៍នៅក្នុងម៉ាស៊ីនចុចមេកានិច។ និងចលនាបកប្រែទៅជាចលនារង្វិល ដែលអនុញ្ញាតឱ្យពួកវាត្រូវបានប្រើជា actuator នៃម៉ាស៊ីនចំហេះខាងក្នុង។ យន្តការ crank មាន crank 1 ដែលបានដំឡើងនៅក្នុងស៊ុមជាមួយនឹងលទ្ធភាពនៃការបង្វិល (crank ឬ eccentric shaft) ដំបងតភ្ជាប់ 2 ភ្ជាប់ទៅវាដែលត្រូវបានភ្ជាប់ជាចម្បងទៅនឹងគ្រាប់រំកិល 3 ដែលនៅពេលដែល crank 1 បង្វិល។ ធ្វើចលនាច្រាសមកវិញនៅក្នុងការណែនាំនៃស៊ុម 4 (សូមមើលរូបទី 9) ។
អង្ករ។ 9. យន្តការ crank ។
នៅក្នុងរូបភព។ រូបភាពទី 10 បង្ហាញពីយន្តការ crank-rod នៃម៉ាស៊ីនចំហេះខាងក្នុងស៊ីឡាំង 4 ដែលរួមមាន crankshaft 4-eccentric crankshaft 1 និង piston group 4 (រូបភាព 10 តាមធម្មតាបង្ហាញពីក្រុម piston មួយ) ដែលនីមួយៗមានដំបងតភ្ជាប់ 2 និង a piston 3 ដែលត្រូវបានលាយបញ្ចូលគ្នានៅក្នុងស្រទាប់នៃស៊ីឡាំងដែលត្រូវគ្នា។
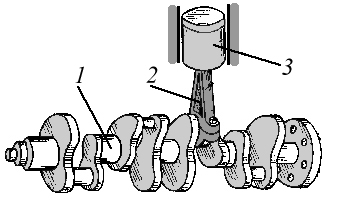
អង្ករ។ 10. យន្តការ crank
ម៉ាស៊ីនចំហេះខាងក្នុង។
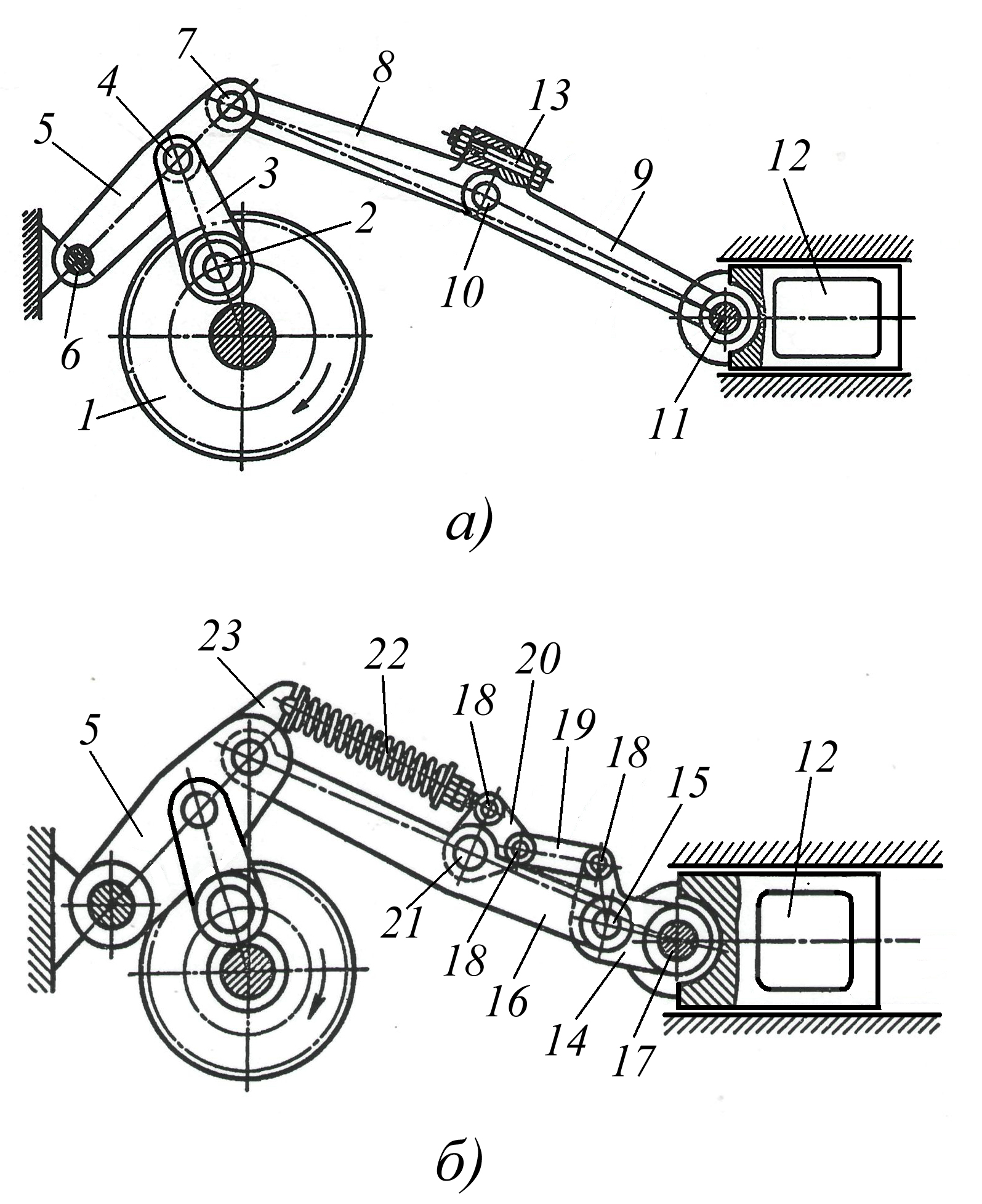
ការរចនានៃម៉ាស៊ីន និងបរិក្ខារមួយចំនួនតម្រូវឱ្យបង្កើតនូវស្ត្រូកគ្រាប់រំកិលធំ និងកម្លាំងដ៏ច្រើននៅចុងបញ្ចប់នៃជំងឺដាច់សរសៃឈាមខួរក្បាល។ ក្នុងករណីនេះ យន្តការដងថ្លឹងជង្គង់ត្រូវបានប្រើ ដែលរួមបញ្ចូលផងដែរនូវ crank និងក្រុមដំបងតភ្ជាប់ (សូមមើលរូបភាពទី 11)។ យន្តការបែបនេះមាន crank 1 ដែលបានម៉ោននៅលើអ័ក្សដ្រាយ 2, បង្វិលនៅក្នុង bearings នៃស៊ុម, ដំបងតភ្ជាប់ដ្រាយ 4, ដៃ rocker 6, ដំបងតភ្ជាប់ជំរុញ 7 និងគ្រាប់រំកិល 10 ផ្លាស់ទីនៅក្នុងមគ្គុទ្ទេសក៍នៃស៊ុម 11 ខណៈពេលដែលដៃរ៉ុក 6 ត្រូវបានភ្ជាប់ជាស្នូលទៅនឹងស៊ុមដោយមធ្យោបាយនៃអ័ក្ស 8 ហើយដំបងតភ្ជាប់ដែលជំរុញ 7 ត្រូវបានភ្ជាប់ទៅនឹងគ្រាប់រំកិល 10 តាមរយៈអ័ក្ស 9 (សូមមើលរូបភាព 11a) ។ តំណភ្ជាប់លទ្ធផលនៃយន្តការបែបនេះអាចមិនមែនជាគ្រាប់រំកិលដែលផ្លាស់ប្តូរជាបណ្តើរៗទេ ប៉ុន្តែជាតំណភ្ជាប់យោល 10 ដែលភ្ជាប់ជាស្នូលតាមរយៈអ័ក្ស 9 ទៅដំបងតភ្ជាប់ដែលជំរុញ 7 និងតាមរយៈអ័ក្ស 11 ទៅកាន់ស៊ុម (សូមមើលរូបភាពទី 11 ខ)។
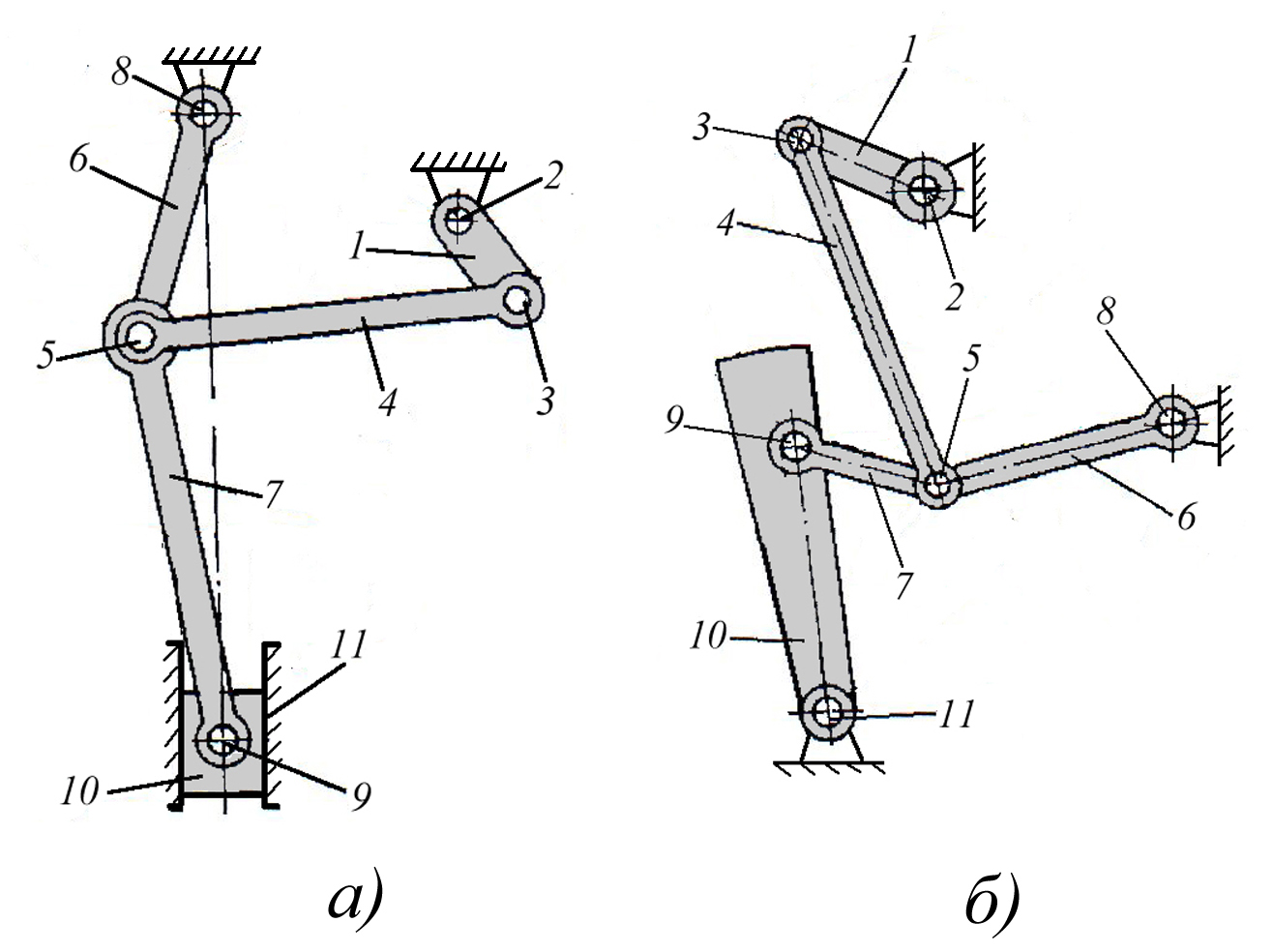
អង្ករ។ 11. យន្តការ crank ជាមួយនឹងការដាច់សរសៃឈាមខួរក្បាលគ្រាប់រំកិលធំនិងកម្លាំងនៅលើគ្រាប់រំកិលនៅចុងបញ្ចប់នៃជំងឺដាច់សរសៃឈាមខួរក្បាលនេះ។
រួមជាមួយនឹងប្រព័ន្ធនៃដៃ rocker, levers និង rods យន្តការ crank អនុញ្ញាតឱ្យអ្នកទទួលបានទំហំ stroke ផ្សេងគ្នា, ល្បឿននិងចំនួន strokes នៃតំណភ្ជាប់ទិន្នផលរបស់វា - គ្រាប់រំកិលដែលជាញឹកញាប់ចាំបាច់នៅក្នុងប្រតិបត្តិការនៃចំនួននៃម៉ាស៊ីននិង ឧបករណ៍។
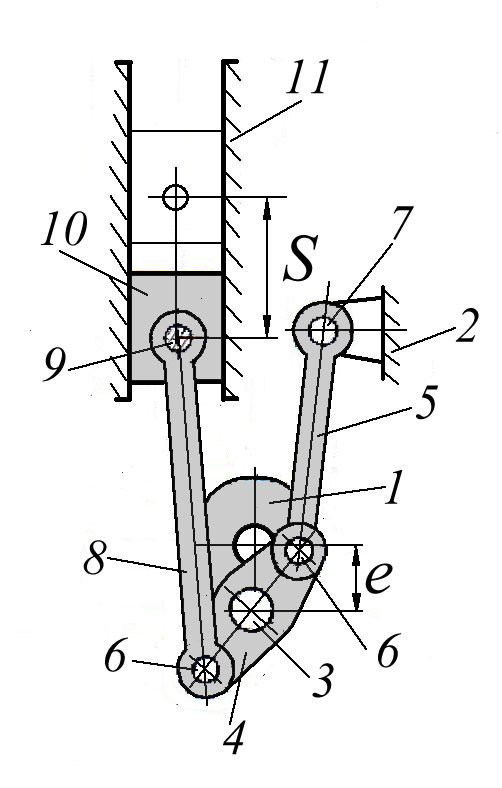
អង្ករ។ 12. ការរចនានៃយន្តការ crank ជាមួយនឹងជំងឺដាច់សរសៃឈាមខួរក្បាលពីរដងនៃស្លាយធៀបនឹង eccentricity នៃ crankshaft នេះ។
នៅក្នុងរូបភព។ រូបភាពទី 12 បង្ហាញពីដ្យាក្រាមរចនានៃយន្តការ crank ជាមួយនឹងការដាច់ពីរដងនៃគ្រាប់រំកិល ស បើប្រៀបធៀបទៅនឹងតម្លៃ eccentricity crankshaft អ៊ី . វាមានអ័ក្សទ្រនិច 1 ដែលត្រូវបានម៉ោននៅលើសត្វខ្លាឃ្មុំនៅក្នុងលំនៅដ្ឋាន 2 នៅលើកញ្ចឹងក crank 3 ដែលក្នុងនោះមានដៃរ៉ុក 4 ភ្ជាប់តាមអ័ក្ស 6 ទៅដំបង 5 ដែលត្រូវបានម៉ោននៅក្នុងលំនៅដ្ឋាន 2 នៅលើអ័ក្ស 7 និងដំបងតភ្ជាប់។ 8 ភ្ជាប់ដោយស្នូលតាមអ័ក្ស 9 ទៅនឹងគ្រាប់រំកិល 10 ផ្លាស់ទីក្នុងមគ្គុទ្ទេសក៍ 11. វត្តមាននៅក្នុងការរចនានៃយន្តការនៃដៃ rocker 4 ដែលដាក់ hingedly នៅលើ crank neck នៃ crank shaft 1 ភ្ជាប់ទៅនឹងដំបង 5 និងការភ្ជាប់ ដំបង 8 បញ្ជូនទៅគ្រាប់រំកិល 10 បង្កើនចលនាក្នុងអំឡុងពេលនៃការដើរទៅមុខនិងបញ្ច្រាស។
![]()
អង្ករ។ 13. ការរចនានៃយន្តការអនុញ្ញាតឱ្យអ្នកបង្កើនទ្វេដងនៃចំនួន strokes នៃគ្រាប់រំកិលដោយមិនផ្លាស់ប្តូរល្បឿនបង្វិល crankshaft ។
នៅក្នុងរូបភព។ 13 បង្ហាញពីការរចនានៃយន្តការ crank រួមបញ្ចូលគ្នាជាមួយយន្តការ rocker ដែលអនុញ្ញាតឱ្យបង្កើនទ្វេដងនៃចំនួន strokes នៃ slider ដោយមិនបង្កើនល្បឿនមុំនៃការបង្វិលនៃ crank shaft ដ្រាយ។ វាមានចង្កឹះលេខ 1 ភ្ជាប់ជាមួយទ្រនាប់នៅលើស៊ុម និងទទួលការបង្វិលពីដ្រាយ (ដ្រាយមិនត្រូវបានបង្ហាញក្នុងរូបភាពទី 13) ដំបងតភ្ជាប់ 2 ដៃចង្កូតទ្វេ 3 ដែលដាក់ហ៊ីងនៅលើស៊ុមដោយមធ្យោបាយ នៃអ័ក្ស 4 និងដោយមធ្យោបាយនៃដំបងតភ្ជាប់ 5 ភ្ជាប់ទៅនឹងគ្រាប់រំកិល 6 ការផ្លាស់ប្តូរនៅក្នុងមគ្គុទ្ទេសក៍គ្រែ 7 ។
យន្តការនេះដំណើរការដូចខាងក្រោម។ នៅពេលបង្វិលអ័ក្សទ្រេត 1 នៅមុំ 180 ដឺក្រេ ដៃចង្កូតទ្វេ 3 បង្វិលនៅមុំមួយ។ ក
ខណៈពេលដែលគ្រាប់រំកិល 6 ធ្វើឱ្យមានការដាច់សរសៃឈាមខួរក្បាលពីរដងជាមួយនឹងការបង្វិលបន្ថែមទៀតនៃអ័ក្ស crank 1 ដោយ 180 ដឺក្រេផ្សេងទៀត lever ប្រដាប់អាវុធពីរដង 3 ម្តងទៀតនៅមុំមួយ។ ក
ត្រឡប់ទៅទីតាំងដើមរបស់វាវិញ ហើយគ្រាប់រំកិល 6 ក្នុងពេលតែមួយ ធ្វើឱ្យមានការដាច់សរសៃឈាមខួរក្បាលពីរដងក្នុងបដិវត្តន៍មួយនៃអ័ក្ស crank ។
អង្ករ។ 14. ការរចនានៃយន្តការ lever អនុញ្ញាតឱ្យអ្នកបញ្ច្រាសចលនានៃតំណភ្ជាប់ទិន្នផល។
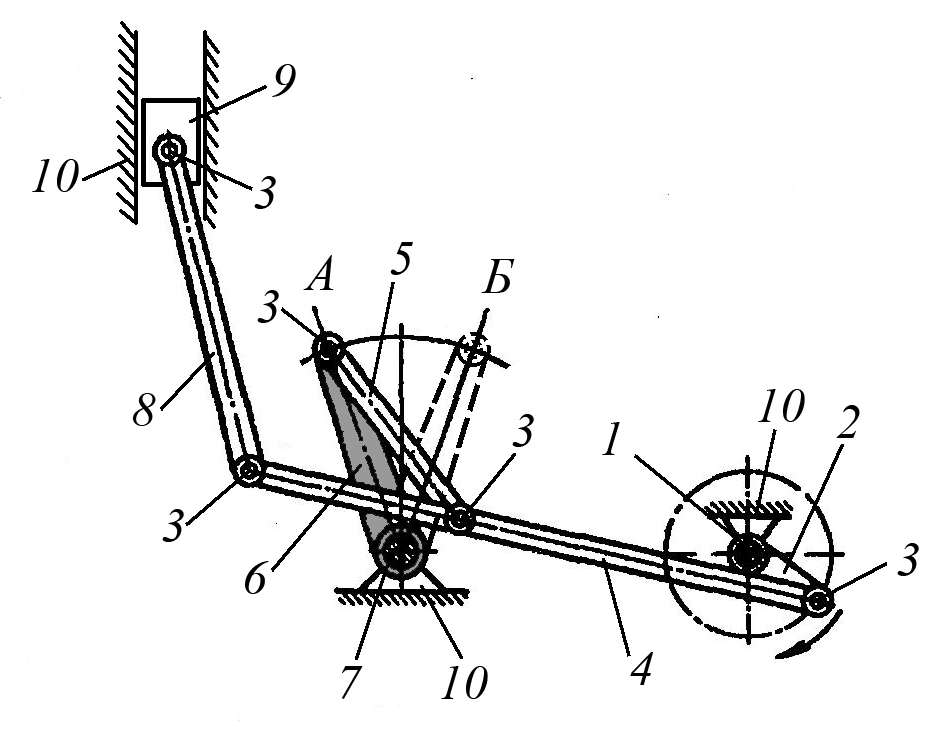
ក្នុងករណីខ្លះនៅក្នុងវត្តមាននៃដ្រាយដែលមិនបញ្ច្រាសវាចាំបាច់ដើម្បីបញ្ច្រាសចលនានៃតំណភ្ជាប់ទិន្នផលនៃយន្តការសម្រាប់ការនេះតំណភ្ជាប់បន្ថែមអាចត្រូវបានបង្កើតឡើងនៅក្នុងវាដូចដែលបានបង្ហាញនៅក្នុងរូបភព។ 14. យន្តការ crank-lever នេះមាន crank 2 ដែលបានម៉ោននៅលើ driveshaft 1, mounted on bearings in the frame 10, pinotally connected by means of an axis 3 to the driving rod connect rod 4, which in turn is piotally connect by means នៃអ័ក្ស 3 ទៅដំបងតភ្ជាប់កម្រិតមធ្យម 5 និងដំបងតភ្ជាប់មួយដែលត្រូវបានជំរុញ 6 ដែលនៅក្នុងវេនត្រូវបានតភ្ជាប់ដោយសំខាន់ដោយមធ្យោបាយនៃអ័ក្ស 3 ទៅដៃ rocker 6 និងគ្រាប់រំកិល 9 រៀងគ្នា។ ដើម្បីផ្លាស់ប្តូរទិសដៅនៃចលនាច្រាសមកវិញនៃគ្រាប់រំកិល 9 ដៃរ៉ុក 6 ត្រូវបានផ្លាស់ប្តូរពីទីតាំង A ទៅទីតាំង B និងច្រាសមកវិញបន្ទាប់ពីនោះវាត្រូវបានជួសជុល (បន្ទះមិនត្រូវបានបង្ហាញក្នុងរូបភាពទី 14) ។

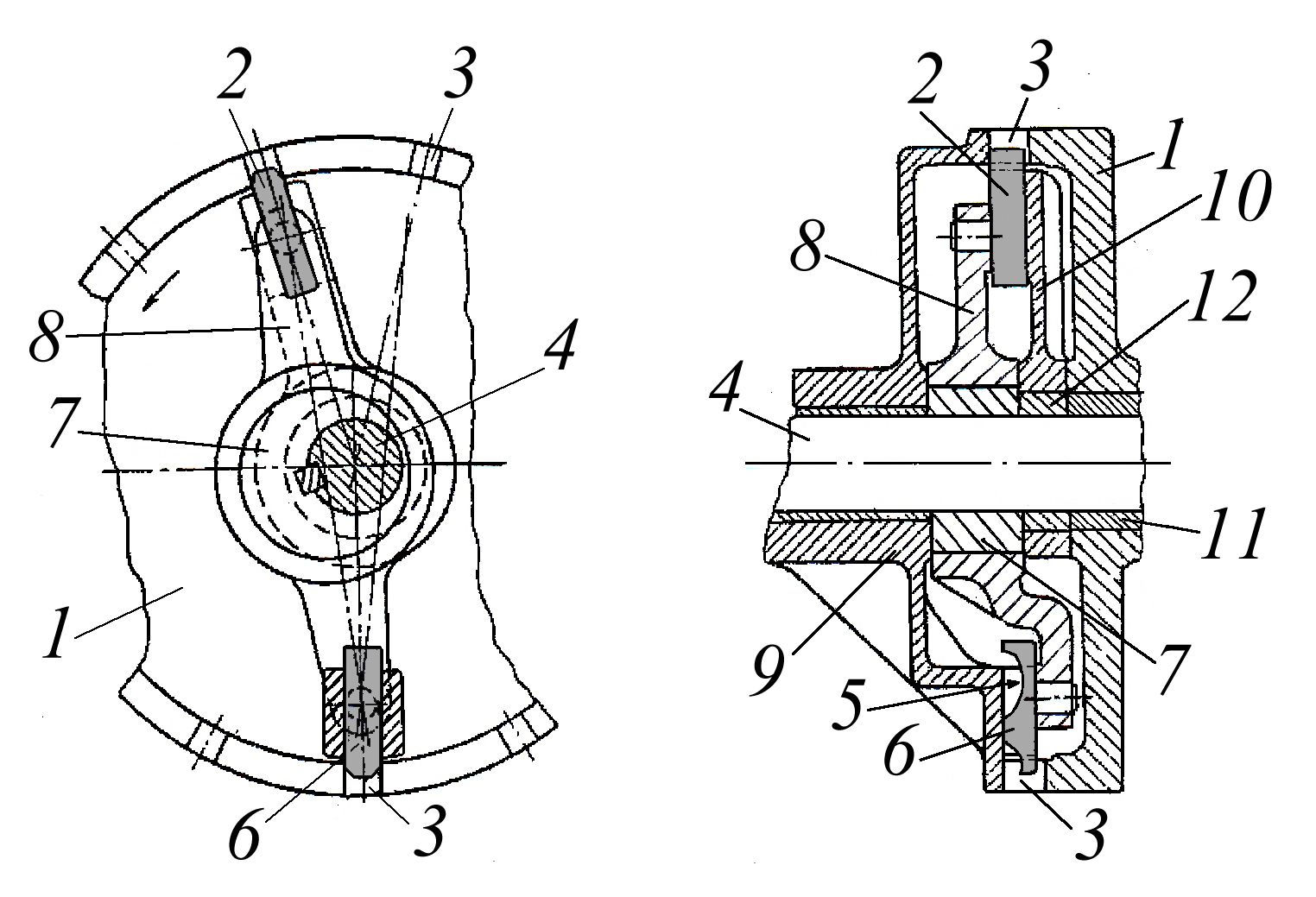
អង្ករ។ 15. ដ្យាក្រាមរចនានៃឧទ្ធម្ភាគចក្រ swashplate ដែលមានប្រព័ន្ធនៃយន្តការប្រសព្វ និង lever ។
នៅក្នុងរូបភព។ រូបភាពទី 15 បង្ហាញពីការរចនាដើមនៃបន្ទះស្វ័យប្រវត្តបង្រួមតូច ដែលគ្រប់គ្រងផ្នែកនៃ rotor មេរបស់ឧទ្ធម្ភាគចក្រ ដែលធ្វើឡើងនៅលើមូលដ្ឋាននៃយន្តការ hinged-lever ។ វាមានក្រវ៉ាត់បង្វិល 1 ជាមួយនឹងកំណាត់ដែក 2 ដែលគ្រប់គ្រង blades rotor សំខាន់ និង spline - hinge 3 ដែលត្រូវបានដំឡើងនៅលើចិញ្ចៀនមិនបង្វិល 5 ដោយមធ្យោបាយនៃ ball bearing 4. driver of spline - hinge 3 ត្រូវបានជួសជុលនៅលើ shaft 6 នៃប្រអប់លេខ rotor drive ឧទ្ធម្ភាគចក្រ។ នៅលើចិញ្ចៀនដែលមិនបង្វិល 5 ស៊ុម 11 ផ្លាស់ទីដោយប្រើម្រាមដៃ 7 និង 8 និងសត្វខ្លាឃ្មុំរាងស្វ៊ែរ 9 និង 10 ។ នៅលើស៊ុមទី 11 ដោយប្រើម្រាមដៃ 12 និង 13 និងសត្វខ្លាឃ្មុំរាងស្វ៊ែរ 14 និង 15 នៅចំណុច TO
និង ម
ដងថ្លឹង 16 ត្រូវបានជួសជុល ដែលត្រូវបានម៉ោននៅក្នុងប្រដាប់ទ្រនាប់ធម្មតារ៉ាឌីកាល់ 19 និង 20 និងទ្រនាប់រុញ 21 និង 22 ដោយម្ជុលលេខ 17 នៅក្នុងតង្កៀប 18 ដែលដាក់យ៉ាងតឹងរ៉ឹងនៅលើលំនៅដ្ឋានប្រអប់លេខ 23. ដងថ្លឹង 16 ធ្វើពីដៃពីរ និង ដៃបើកបររបស់វាត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងដំបង 24 សម្រាប់គ្រប់គ្រងទីលានទូទៅនៃវីសដាប់ខ្លួន កំណាត់គ្រប់គ្រងបណ្តោយ និងនៅពេលក្រោយ 25 និង 26 ត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងរង្វង់មិនបង្វិល 5 នៅលើជ្រុងផ្ទុយគ្នាទាក់ទងទៅនឹងដំបងគ្រប់គ្រងទីលានរួម 24 ។ វត្តមានរបស់សត្វខ្លាឃ្មុំរាងស្វ៊ែរ 9, 10, 14, 15 នៅក្នុងការរចនាម៉ាស៊ីនធានានូវការបង្វិលរង្វង់បង្វិល 1 តាមបណ្តោយស្វ៊ែរ ដែលចាំបាច់សម្រាប់ប្រតិបត្តិការធម្មតានៃប្រព័ន្ធគ្រប់គ្រងឧទ្ធម្ភាគចក្រ។ ក្នុងករណីនេះអ័ក្សឆ្លងកាត់ចំណុចកណ្តាលនៃសត្វខ្លាឃ្មុំស្វ៊ែរ 9 និង 10 ជី
និង ឃ
និងអ័ក្សឆ្លងកាត់ចំណុចកណ្តាលនៃសត្វខ្លាឃ្មុំស្វ៊ែរ 14 និង 15 TO
និង ម
កាត់កែងទៅវិញទៅមក និងទីតាំងនៃស៊ុម 11 និងដងថ្លឹង 16 ដែលត្រូវបានរចនាឡើងដើម្បីគ្រប់គ្រងទីលានទាំងមូលនៃផ្លុំផ្លោង និងរក្សារង្វង់មិនបង្វិល 5 ពីការផ្លាស់ទីលំនៅ និងការបង្វិលទាក់ទងទៅនឹងអ័ក្សនៃអ័ក្សដ្រាយ 6 គឺបំពាន ទាក់ទងទៅនឹង យន្តហោះនៃការគ្រប់គ្រងបណ្តោយនិងឆ្លងកាត់របស់ម៉ាស៊ីន - skew ។ អ័ក្សនៃការបង្វិលនៃដងថ្លឹង 16 គឺស្របទៅនឹងអ័ក្សឆ្លងកាត់ចំនុច TO
និង ម
.
ម៉ាស៊ីន swashplate ដំណើរការដូចខាងក្រោម។ លំហរង្វិលនៃផ្លុំផ្លុំត្រូវបានគ្រប់គ្រងដោយការបង្វិលរង្វង់បង្វិល 1 ជាមួយនឹងដំបងបញ្ជា 25 និង 26 ទាក់ទងទៅនឹងអ័ក្សពីរនៃចលនានៃចំនុច។ ក
និង IN
. ក្នុងករណីនេះ ចិញ្ចៀនបង្វិល 1 និងចិញ្ចៀនមិនបង្វិល 5 នៅក្នុងសត្វខ្លាឃ្មុំស្វ៊ែរ 9 និង 10 បង្វិលទាក់ទងទៅនឹងស៊ុម 11 និងស៊ុមរួមជាមួយនឹងចិញ្ចៀនបង្វិល 1 និងចិញ្ចៀនមិនបង្វិល 5 នៅក្នុងសត្វខ្លាឃ្មុំស្វ៊ែរ 14 និង 15 ទាក់ទងទៅនឹងដងថ្លឹង 16. ជម្រេទូទៅនៃផ្លុំផ្លុំត្រូវបានគ្រប់គ្រងដោយចំណុចផ្លាស់ទី ទំ
ដង្កៀប 16 ដោយដំបងបញ្ជានៃទីលានសមូហភាព 24. ចាប់តាំងពីដងថ្លឹងលេខ 16 ត្រូវបានព្យួរនៅលើតង្កៀប 18 ដោយបានម៉ោនយ៉ាងតឹងរ៉ឹងនៅលើលំនៅដ្ឋានប្រអប់លេខ 23 ចិញ្ចៀនមិនបង្វិលលេខ 5 ត្រូវបានផ្លាស់ទីលំនៅ និងបង្វិលដោយកាំរស្មី។ រ
ទាក់ទងទៅនឹងអ័ក្សដែលឆ្លងកាត់អ័ក្សតង្កៀប 18 ហើយត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សនៃអ័ក្ស 6 ដោយបរិមាណមិនសំខាន់។ នៅពេលដែលរួមគ្នាគ្រប់គ្រងចំណោតទូទៅ និងរង្វិលនៃផ្លោង ចំនុចផ្លាស់ទីក្នុងពេលដំណាលគ្នា ក, ខ
និង ទំ
. ក្នុងករណីនេះការលំអៀងក្នុងពេលដំណាលគ្នានិងចលនានៃរង្វង់ថេរ 5 និងចិញ្ចៀនដែលអាចចល័តបាន 1 កើតឡើង។
យន្តការរ៉ក
យន្តការ Rocker គឺជាយន្តការដែលមានតំណភ្ជាប់ជាក់លាក់ពីរ៖ រ៉ក និងថ្មរ៉ុក (សូមមើលរូបទី 16) ដែលនីមួយៗអនុវត្តចលនាបង្វិល ឬរញ្ជួយ ផ្លាស់ទីជាបន្តបន្ទាប់ទាក់ទងគ្នាទៅវិញទៅមក។ វត្តមាននៃតំណភ្ជាប់ពីរបែបនេះនៅក្នុងយន្តការនាំទៅរកល្បឿនខុសគ្នានៃចលនានៃតំណភ្ជាប់ដែលបានជំរុញក្នុងអំឡុងពេលចលនាទៅមុខនិងបញ្ច្រាសរបស់វាដែលក្នុងករណីខ្លះជាគុណសម្បត្តិនៃយន្តការហើយក្នុងករណីខ្លះគុណវិបត្តិហើយជាទូទៅកំណត់តំបន់នៃ ការប្រើប្រាស់របស់វា។ មានយន្តការ rocker ពីរប្រភេទសំខាន់ៗ ដែលខុសគ្នានៅក្នុងចលនាដែល rocker បង្កើត ទាំងនេះគឺជាយន្តការជាមួយនឹងការរញ្ជួយ និងចលនាបង្វិលរបស់ rocker

អង្ករ។ 16. ប្រភេទនៃយន្តការរ៉ុក
នៅក្នុងរូបភព។ 16a បានបង្ហាញ យន្តការជាមួយនឹងចលនារញ្ជួយនៃឆាក
រួមមាន crank 1 នៅលើអ័ក្ស 2 ដែលថ្ម rocker 3 ត្រូវបានដាក់ដែលមានលទ្ធភាពនៃចលនាបកប្រែនៅក្នុង groove នៃ rocker 4 ដែលត្រូវបានម៉ោននៅលើទីតាំងស្ថានីដោយមធ្យោបាយនៃអ័ក្ស 5 និងធ្វើឱ្យថ្ម។ ចលនានៅពេល crank 1 បង្វិលក្នុងករណីនេះ rocker 4 ធ្វើឱ្យមានការដាច់សរសៃឈាមខួរក្បាលទៅមុខនៅពេលដែល crank ត្រូវបានបត់ 1 ក្នុងមួយជ្រុង ក
, និងការដាច់សរសៃឈាមខួរក្បាលបញ្ច្រាសនៅពេលបង្វិល crank នៅមុំមួយ។ IN
ដែលនាំទៅរកភាពខុសប្លែកគ្នាក្នុងល្បឿនទៅមុខ និងបញ្ច្រាស ដោយសារភាពមិនស្មើគ្នានៃមុំទាំងនេះ។ នៅក្នុងរូបភព។ 16b បានបង្ហាញ យន្តការជាមួយនឹងចលនាបង្វិលនៃឆាក
រួមមាន crank 1 នៅលើអ័ក្ស 2 ដែលថ្ម rocker 3 ត្រូវបានដាក់ និង rocker 4 មួយត្រូវបានម៉ោននៅលើទីតាំងស្ថានីដោយមធ្យោបាយនៃអ័ក្ស 5 និងអនុវត្តចលនាបង្វិលនៅពេលដែល crank 1 បង្វិល។ ជាមួយនឹងការរចនានៃយន្តការ rocker នេះ ភាពខុសគ្នានៃល្បឿននៃចលនាទៅមុខ និងបញ្ច្រាសរបស់ rocker ក៏ត្រូវបានកំណត់ដោយភាពខុសគ្នានៃមុំផងដែរ។ ក
និង IN
.
បើប្រៀបធៀបទៅនឹងយន្តការតំណបួនដែលប្រើក្នុងគោលបំណងដូចគ្នា (សូមមើលរូបទី 3) យន្តការ rocker ធ្វើឱ្យវាកាន់តែងាយស្រួលក្នុងការធានានូវប្លង់នៃ drive crank និង driver rocker ដោយដាក់វាស៊ីមេទ្រីទាក់ទងទៅនឹងអ័ក្សធម្មតា ដែលជួនកាល ចាំបាច់ក្នុងអំឡុងពេលរចនា។ ប៉ុន្តែក្នុងពេលជាមួយគ្នានេះ យន្តការរ៉កបានបង្កើនការខាតបង់ដោយសារការកកិតរអិលបន្ថែមនៅក្នុងគូរ៉ុក ហើយដូច្នេះវាត្រូវបានគេប្រើជាចម្បងនៅក្នុងយន្តការជំនួយដែលមានបន្ទុកស្រាលនៃឧបករណ៍បច្ចេកវិទ្យា។
អង្ករ។ 17. យន្តការ crank ផ្លាស់ប្តូរមុំ
swing នៃតំណជំរុញ។
នៅក្នុងរូបភព។ 17. បង្ហាញដ្យាក្រាមរចនានៃយន្តការរ៉កដែលប្រើដើម្បីបង្កើនឬបន្ថយមុំយោលនៃតំណជំរុញដែលទាក់ទងទៅនឹងតំណបើកបរ។ វាមាន crank 1 ដែលបានម៉ោននៅលើអ័ក្ស 2 បញ្ជូនកម្លាំងបង្វិលទៅវាភ្ជាប់ទៅវាតាមរយៈអ័ក្ស 3 ថ្ម rocker 4 និង rocker 5 បានម៉ោននៅលើអ័ក្ស 6 បានម៉ោនសម្រាប់ការបង្វិលនៅលើ bearings ធម្មតា។ នៅពេលដែល crank 1 ត្រូវបានបត់នៅមុំមួយ។ ក វីស 5 បង្វិលនៅមុំមួយ។ IN ដែលសម្រាប់សមាមាត្រដែលបានផ្តល់ឱ្យនៃប្រវែងនៃ crank 1 តំណភ្ជាប់ 5 និងចម្ងាយរវាងពួកវាទ្វេដង។ ហើយផ្ទុយទៅវិញ ជាមួយនឹងការភ្ជាប់ដ្រាយ 5 crank 1 នឹងបង្វិលនៅមុំពាក់កណ្តាល។
អង្ករ។ 18. យន្តការ crank សម្រាប់បើកបរម៉ាស៊ីនឆ្លងកាត់។
ទោះយ៉ាងណាក៏ដោយនៅក្នុងករណីមួយចំនួន យន្តការរ៉កក៏អាចប្រើជាឧបករណ៍បច្ចេកវិជ្ជាបានដែរ។ ឧទាហរណ៏នៃការនេះគឺជាដ្រាយ caliper នៃម៉ាស៊ីនឆ្លងកាត់ដែលបានបង្ហាញនៅក្នុងរូបភាពទី 18 ។ វាមាន crank 1 ដែលបានម៉ោននៅលើ shaft បង្វិលនៅលើ bearings នៅក្នុងស៊ុមភ្ជាប់តាមអ័ក្ស 2 និង rocker stone 3 ជាមួយ a rocker 4 ដែលត្រូវបានម៉ោនដោយទ្រនិចនៅក្នុងស៊ុមតាមរយៈអ័ក្ស 5 និងដោយមានជំនួយពីអ័ក្ស 6 ភ្ជាប់ទៅនឹងដំបងតភ្ជាប់ 7 ដែលតាមរយៈអ័ក្ស 8 ត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងគ្រាប់រំកិល 9 (សូមមើលរូប 18a)។ នៅក្នុងការរចនានៃ actuator នៃ transverse planer (សូមមើលរូបភព។ 18b) បន្ថែមពីលើតំណភ្ជាប់ដែលបានរាយក្នុងដ្យាក្រាម kinematic ដ្រាយ crank ត្រូវបានផ្តល់ជូនក្នុងទម្រង់ជាឧបករណ៍ 1 - 2 វីស 8 ដើម្បីលៃតម្រូវ eccentricity ។ នៃអ័ក្ស crank 4 តម្លៃដែលកំណត់ការដាច់សរសៃឈាមខួរក្បាលរបស់រទេះរុញ 12 (គ្រាប់រំកិល) វីសនាំមុខ 13 និងការគៀប 14 ការជួសជុលទីតាំងរបស់វាគឺចាំបាច់ដើម្បីកែតម្រូវទីតាំងដំបូងនៃរទេះរុញ 12 របស់ម៉ាស៊ីន។

អង្ករ។ 19. យន្តការ crank នៃសារពត៌មាន។
ការជំនួសឧបករណ៍ភ្ជាប់ដំបងនៃសារពត៌មានជាមួយនឹងយន្តការរ៉ុក អនុញ្ញាតឱ្យអ្នកកាត់បន្ថយគម្លាតរវាងអ័ក្សអេឡិចត្រិច និងគ្រាប់រំកិល ក៏ដូចជាសម្រួល និងបង្កើនភាពត្រឹមត្រូវនៃការកែតម្រូវទំហំនៃចន្លោះរវាងត្រានៃសារពត៌មាន ( សូមមើលរូបទី 19) ។ ការរចនារបស់វាមានស៊ុម 1 នៅក្នុងមគ្គុទ្ទេសក៍ 2 ដែលក្នុងនោះមានគ្រាប់រំកិល 3 ភ្ជាប់ទៅនឹងអ័ក្សអ័រគីដេ 4 តាមរយៈថ្ម rocker 5, rollers 7 និង rocker 6 ដែលមានទីតាំងនៅខាងក្នុងគ្រាប់រំកិល 3 ហើយទាក់ទងជាមួយវាដោយមធ្យោបាយនៃ a គន្លឹះ 9 និងវីស 8. ដើម្បីធានាបាននូវការភ្ជាប់ថ្ម 5 និង backstage 6 នៃគម្លាតអប្បបរមាដែលត្រូវការសម្រាប់តែការរអិលនៃថ្ម 5 នៅក្នុងចង្អូរនៃ backstage 6 យន្តការក្រូចឆ្មារត្រូវបានតំឡើងរវាងពួកវាដែលមាន ក្រូចឆ្មារ 10 និងវីសកែតម្រូវ 11. សម្រាប់ការកែតម្រូវទំហំចន្លោះរវាងចន្លោះប្រហោង វីស 8 ត្រូវបានផ្តល់ ការបង្វិលដែលនាំទៅដល់ចលនានៃឆាកខាងក្រោយទៅខាងស្តាំ ឬខាងឆ្វេង 6 តាមបណ្តោយចង្អូរទំនោរនៃគ្រាប់រំកិល 3 ដែលវាស្ថិតនៅ ជាលទ្ធផលដែលគ្រាប់រំកិលផ្លាស់ទីឡើងលើ ឬចុះក្រោម។ នៅពេលដែល eccentric shaft 4 បង្វិល, ថ្ម 5 ធ្វើឱ្យផ្ទះល្វែង, ចលនាស្រប, សមាសភាគបញ្ឈរដែលត្រូវបានបញ្ជូនទៅគ្រាប់រំកិល 3 ដោយសារតែសមត្ថភាពនៃថ្ម 5 ដើម្បីផ្លាស់ទីដោយសេរីនៅលើ rollers 7 ក្នុងទិសដៅផ្ដេកនៅក្នុងចង្អូរនៃ ស្លាយ ៦.

អង្ករ។ 20. យន្តការជាមួយស្លាយបង្វិល។
នៅក្នុងរូបភព។ រូបភាពទី 20 បង្ហាញពីយន្តការមួយដែលមានស្លាយបង្វិលដែលប្រើក្នុងម៉ាស៊ីនរន្ធដោតដើម្បីបង្កើនល្បឿនត្រឡប់មកវិញ ហៅថាយន្តការ Whitworth ។ វាមានប្រអប់លេខ 1 ដែលស្រោបដោយប្រអប់លេខ 3 ដែលស្ថិតនៅលើអ័ក្ស 5 និងផ្តល់ការបង្វិលទៅវាក្នុងល្បឿនថេរ ថ្មរ៉ុក 4 ដែលសមនឹងចូលទៅក្នុងចង្អូរនៃរ៉កបង្វិល 2 អ័ក្សដែល 6 ឆ្លងកាត់អ័ក្ស 5 និងត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សនៃការបង្វិលកង់ 3 ដោយបរិមាណនៃ eccentricity អ៊ី ក៏ដូចជាដំបងតភ្ជាប់ 7 ភ្ជាប់ទៅនឹងឧបករណ៍រំកិលម៉ាស៊ីន។ ចាប់តាំងពីចំណុចកណ្តាលនៃការបង្វិលរបស់ rocker 2 ត្រូវបានទូទាត់ទាក់ទងទៅនឹងអ័ក្សនៃការបង្វិលរបស់ gear 3 ដែលក្នុងករណីនេះគឺជា crank នោះ rocker stone 4 បង្វិលនៅមុំមួយកំឡុងពេលដាច់សរសៃឈាមខួរក្បាលធ្វើការ។ ក ហើយក្នុងអំឡុងពេលដាច់សរសៃឈាមខួរក្បាលបញ្ច្រាសនៅមុំមួយ។ IN . ដោយសារតែមុំ ក មុំច្រើនទៀត IN ដោយបរិមាណដែលបានកំណត់ដោយទំហំនៃ eccentricity នោះល្បឿនបញ្ច្រាសនៃស្លាយ 2 និងដំបងតភ្ជាប់ 7 ដែលភ្ជាប់ជាមួយវាគឺធំជាងល្បឿននៃការដាច់សរសៃឈាមខួរក្បាលធ្វើការដោយបរិមាណសមាមាត្រទៅនឹងសមាមាត្រនៃមុំទាំងនេះ។
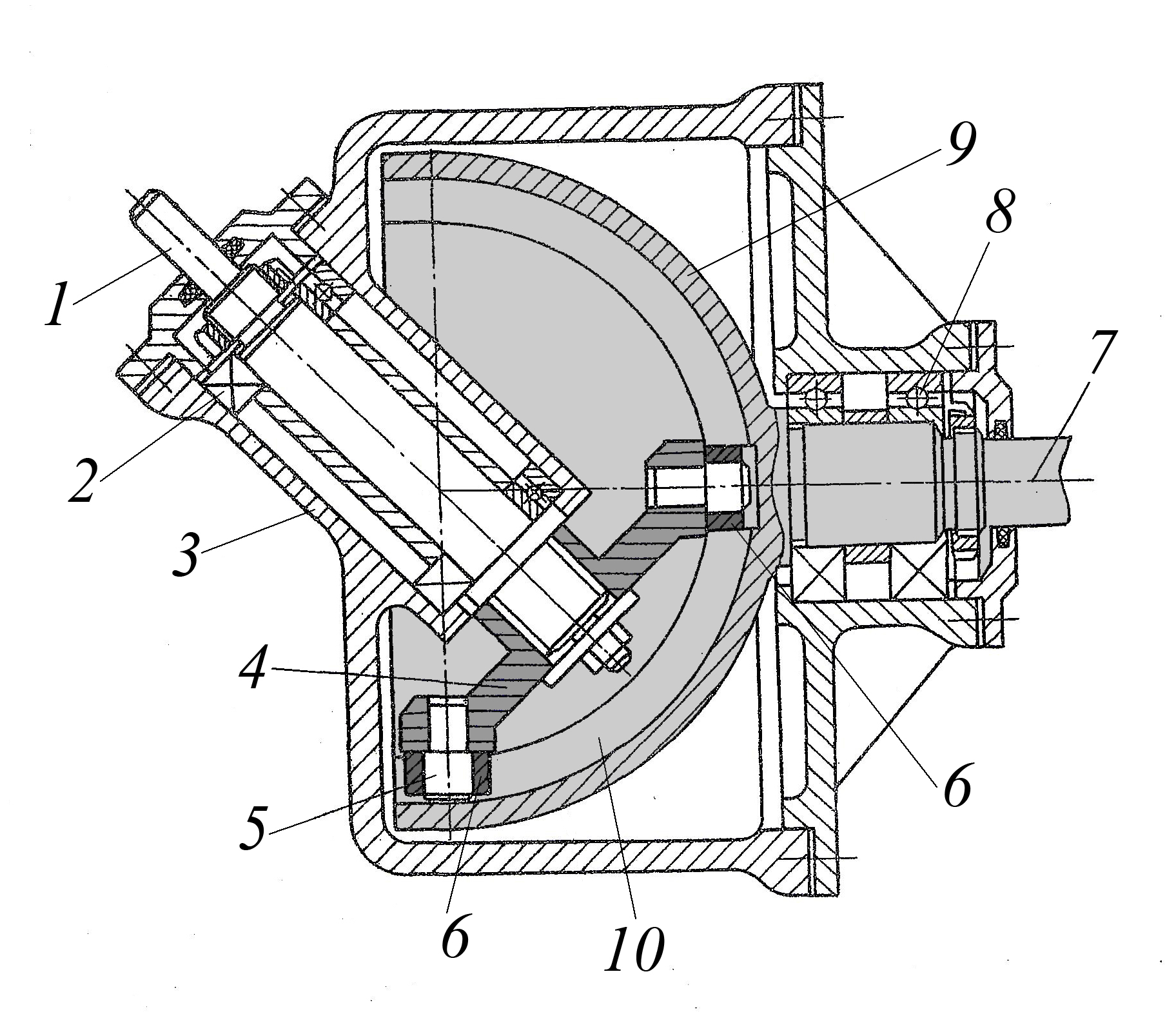
អង្ករ។ 21. យន្តការ Rocker ដែលបញ្ជូនចលនាបញ្ឈប់ទៅអ័ក្សជំរុញ។
យន្តការរ៉ុកអាចត្រូវបានប្រើដើម្បីបញ្ជូនការបង្វិលពីអ័ក្សដ្រាយដែលបង្វិលក្នុងល្បឿនថេរទៅអ័ក្សជំរុញដែលបង្វិលជាបន្តបន្ទាប់។ ការរចនានៃយន្តការបែបនេះត្រូវបានបង្ហាញនៅក្នុងរូបភព។ 21. វាមាន, បានដំឡើងនៅក្នុងលំនៅដ្ឋាន 9 និងបង្វិលក្នុងល្បឿនថេរ, អ័ក្សដ្រាយ 4 ជាមួយ eccentric 7 បានជួសជុលយ៉ាងតឹងរឹងទៅវា, ដែលដំបងតភ្ជាប់ពីរដៃ 8 ត្រូវបានម៉ោន, hingedly ភ្ជាប់ទៅស្លាយដ្រាយ 2 និង ការជួសជុល 6 ក៏ដូចជាបានម៉ោននៅលើ shaft 4 ជាមួយនឹងលទ្ធភាពនៃការបង្វិលដោយឥតគិតថ្លៃនៃ flange ជំរុញ 1 ជាមួយនឹងដៃអាវ 11 និងតំណភ្ជាប់ 10 ជាមួយដៃអាវ 12. ក្នុងករណីនេះ, flange 1 ត្រូវបានធ្វើឡើងជាមួយនឹង grooves រ៉ាដា 3, នៅពេលដែល eccentric 7 បង្វិលជាមួយដំបងតភ្ជាប់ 8 ស្លាយដ្រាយ 2 ចូលឆ្លាស់គ្នាហើយស្លាយជួសជុល 6 ដែលរអិលជាប់ៗគ្នាតាមបណ្តោយចង្អូរបញ្ឈរ 5 នៅក្នុងលំនៅដ្ឋានស្ថានី 9 ត្រូវបានបញ្ចូលជាទៀងទាត់ទៅក្នុងចង្អូរនៃផ្នែកដែលជំរុញ។ 1. នៅពេលដែលអ័ក្សដ្រាយ 4 បង្វិលជាមួយ eccentric 7, ដំបងតភ្ជាប់ដៃទ្វេ 8 ទៀងទាត់បញ្ចូលនិងដកចេញពី grooves 3 នៃ flange ជំរុញ 1 ដ្រាយ 2 និងស្លាយជួសជុល 6 ដែលនាំទៅដល់ការបង្វិលនៃ flange ជំរុញ 1 នៅពេលដែលស្លាយដ្រាយ 2 ត្រូវបានបញ្ចូលទៅក្នុងចង្អូរ 3 ហើយគែមដែលជំរុញ 1 ឈប់នៅពេលដែលស្លាយចាក់សោ 6 ត្រូវបានបញ្ចូលទៅក្នុងចង្អូរ 3. ចំនួននៃចង្អូរ 3 នៅក្នុងផ្នែកដែលជំរុញ 1 កំណត់សមាមាត្រនៃល្បឿនបង្វិលរបស់វាជាមួយនឹងការបង្វិល។ ល្បឿននៃអ័ក្សដ្រាយ 4. នៅដើមនៃស្លាយដ្រាយទី 2 ចូលទៅក្នុងចង្អូរដែលជំរុញដោយប្រឡោះ 1 ក្រោយមកទៀតចាប់ផ្តើមបង្វិលយឺត បន្ទាប់មកល្បឿនរបស់វាកើនឡើងយ៉ាងឆាប់រហ័ស ហើយនៅពេលដែលគ្រាប់រំកិល 2 ចេញពីការភ្ជាប់វាថយចុះម្តងទៀត ដែល លុបបំបាត់ការប៉ះទង្គិច និងផលប៉ះពាល់សូម្បីតែក្នុងល្បឿនខ្ពស់នៃយន្តការ។
រូបភាពទី 22 ការរចនានៃយន្តការរ៉ក អ័ក្សនៃដ្រាយ និងអ័ក្សរុញ
ដែលប្រសព្វនៅមុំ 45 ដឺក្រេ។
នៅក្នុងរូបភព។ រូបភាពទី 22 បង្ហាញពីការរចនានៃយន្តការ rocker ដែលអនុញ្ញាតឱ្យចលនាត្រូវបានបញ្ជូនរវាង shafts ប្រសព្វគ្នានៅមុំ 45 ដឺក្រេ។ យន្តការនេះមានអ័ក្សដ្រាយ 1 ដែលត្រូវបានដំឡើងនៅក្នុងលំនៅដ្ឋាន 3 ដោយមធ្យោបាយនៃសត្វខ្លាឃ្មុំ 2 នៅចុងខាងក្រោមដែល crank 4, crank គាំទ្រ 4, បានម៉ោននៅលើអ័ក្ស 5 គ្រាប់រំកិល 6 ក៏ដូចជាអ័ក្សទិន្នផល 7 បានម៉ោន។ នៅលើសត្វខ្លាឃ្មុំ 8 នៅក្នុងលំនៅដ្ឋាន 3 ដែលត្រូវបានផលិតក្នុងមួយដុំជាមួយស្លាយ 9 ដែលមានចង្អូរពីរ 10 ប្រសព្វគ្នានៅមុំ 90 ដឺក្រេដែលគ្រាប់រំកិល 6 នៃ crank 4 មានទំនាក់ទំនង។
យន្តការនេះដំណើរការដូចខាងក្រោម។ នៅពេលបង្វិល crank 4 នៅមុំមួយ។ 2𝝅
គ្រាប់រំកិល 6 ផ្លាស់ទីតាមចង្អូរ 10 ហើយនៅពេលជាមួយគ្នាបង្វិលស្លាយនៅមុំមួយ 𝝅
ដូច្នេះសមាមាត្រប្រអប់លេខពី crank 4 ទៅ rocker 9 គឺស្មើនឹង 2
. ការរចនានៃយន្តការអនុញ្ញាតឱ្យបញ្ជូនចលនាពីស្លាយ 9 ទៅ crank 4 (ក្នុងករណីនេះ shaft 7 ក្លាយជាការជំរុញមួយ និង shaft 1 ក្លាយជាជំរុញមួយ) ។ ក្នុងករណីនេះសមាមាត្រប្រអប់លេខនឹងស្មើនឹង 0,5
.
យន្តការដងថ្លឹងជាមួយនឹងការបន្ថែម
ធាតុរចនាសម្ព័ន្ធ
នៅពេលដែលយន្តការដងថ្លឹងត្រូវបានប្រើជាផ្នែកនៃឧបករណ៍បច្ចេកវិជ្ជា និងគ្រឿងបន្ថែម ដើម្បីធានាបាននូវប្រតិបត្តិការប្រកបដោយប្រសិទ្ធភាព ធាតុផ្សំនៃរចនាសម្ព័ន្ធបន្ថែមត្រូវបានបង្កើតឡើងនៅក្នុងវា ដែលអនុញ្ញាតឱ្យដោះស្រាយកិច្ចការដូចខាងក្រោមៈ
- លៃតម្រូវតម្លៃដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់លទ្ធផល (គ្រាប់រំកិល, ដងថ្លឹង, រ៉ក)
- លៃតម្រូវទីតាំងដំបូង (ចុងក្រោយ) នៃតំណភ្ជាប់លទ្ធផល,
- ការពារផ្នែកយន្តការពីការខូចខាត
- ទំនាក់ទំនងចលនាស្មុគស្មាញទៅកាន់តំណភ្ជាប់លទ្ធផល
- បើក និងបិទយន្តការ
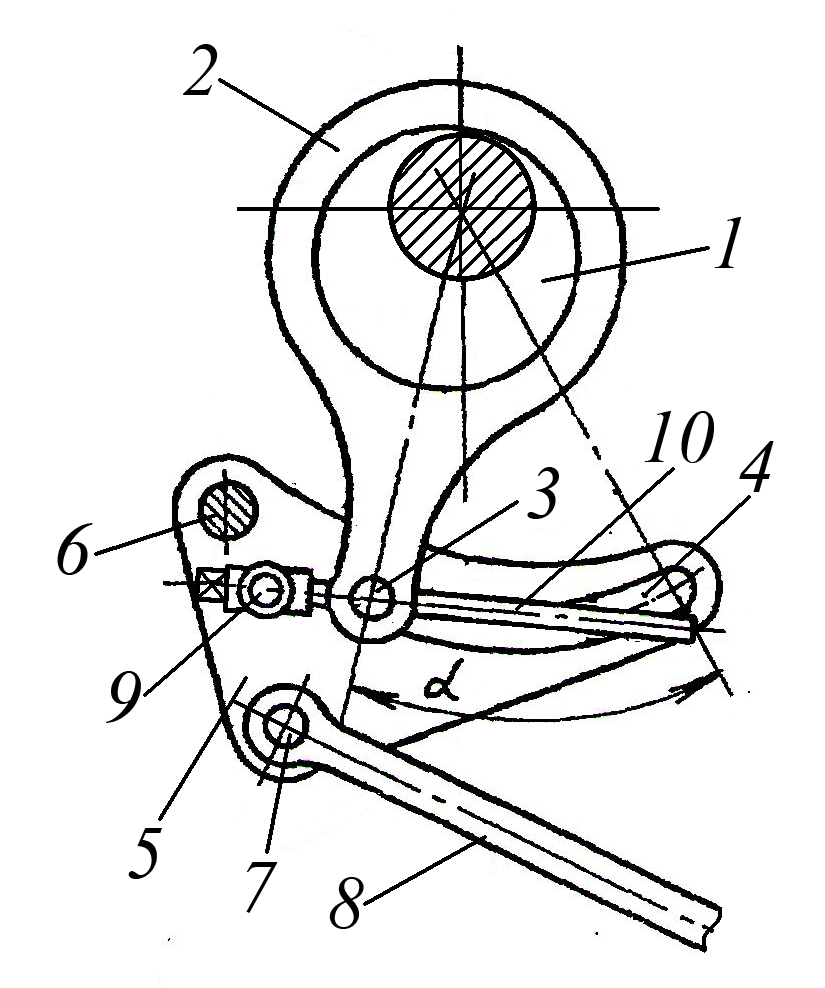
ចូរយើងពិចារណាឧទាហរណ៍នៃការអនុវត្តស្ថាបនានៃយន្តការ lever បែបនេះ។ បទប្បញ្ញត្តិនៃតម្លៃដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលនៃយន្តការ lever ត្រូវបានអនុវត្តតាមពីរវិធីដោយការផ្លាស់ប្តូរសមាមាត្រនៃដៃ lever ឬដោយការផ្លាស់ប្តូរតម្លៃ eccentricity នៃ crank ដ្រាយ។

រូបភាពទី 23 ការរចនាឧបករណ៍ដែលអនុញ្ញាតឱ្យអ្នកលៃតម្រូវប្រវែងនៃដៃនាំមុខរបស់វា។
រូបភាពទី 23 បង្ហាញពីការរចនានៃឧបករណ៍ដែលបានបង្កើតឡើងនៅក្នុង lever នៃយន្តការ lever ផ្ទុកពន្លឺ ដែលអនុញ្ញាតឱ្យអ្នកលៃតម្រូវប្រវែងនៃដៃនាំមុខរបស់វា។ ដងថ្លឹងនេះដែលមានដៃនាំមុខ 1 និង 2 ជំរុញ ហើយបានដំឡើងនៅលើអ័ក្ស 3 មានម្ជុល 6 ដែលភ្ជាប់មកជាមួយដោយ hingedly តាមរយៈអ័ក្ស 5 ទៅនឹងដំបងបើកបរ 4 និងបានជួសជុលនៅក្នុងទីតាំងដែលត្រូវការនៅក្នុងចង្អូរ 10 និង វីសកែតម្រូវ 7 ត្រូវបានបញ្ចូលទៅក្នុងរន្ធខ្សែស្រឡាយរបស់វា ក្នុងករណីនេះដៃជំរុញ 2 នៃដងថ្លឹងត្រូវបានភ្ជាប់យ៉ាងសំខាន់តាមអ័ក្ស 8 ទៅនឹងតំណជំរុញនៃយន្តការដងថ្លឹង។ នៅពេលកែតម្រូវប្រវែងនៃដៃនាំមុខ 1 នៃដងថ្លឹង គ្រាប់ 9 ត្រូវបាន unscrewed បន្ទាប់មកម្ជុល 6 ត្រូវបានផ្លាស់ទីទៅម្ខាងឬម្ខាងទៀតតាមបណ្តោយចង្អូរនៃដៃនាំមុខ 1 នៃដងថ្លឹងជាមួយនឹងវីសលៃតម្រូវ 7 ហើយបន្ទាប់មក ម្ជុលលេខ 6 ត្រូវបានចាក់សោជាបន្តបន្ទាប់ជាមួយនឹងគ្រាប់ 9 ។
រូបភាពទី 24 ការរចនានៃយន្តការ crank ជាមួយនឹងឧបករណ៍សម្រាប់លៃតម្រូវដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលរបស់វា។
រូបភាពទី 24 បង្ហាញពីការរចនានៃយន្តការ crank ជាមួយនឹងឧបករណ៍ដែលភ្ជាប់មកជាមួយសម្រាប់ការលៃតម្រូវដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលរបស់វាដែលត្រូវបានធ្វើឡើងក្នុងទម្រង់ជាដៃចង្កូតទ្វេកម្រិតមធ្យមជាមួយនឹងប្រវែងដែលអាចលៃតម្រូវបាននៃដៃដ្រាយ crank shaft 1, នៅលើ crank ដែលដំបងតភ្ជាប់ 2 ត្រូវបានដំឡើង, ភ្ជាប់គ្នាយ៉ាងសំខាន់តាមរយៈអ័ក្ស 3 ជាមួយនឹង lever ដៃទ្វេកម្រិតមធ្យម 5 បានម៉ោននៅលើស៊ុមតាមរយៈអ័ក្ស 6 និងតាមរយៈអ័ក្ស 7 ភ្ជាប់ទៅនឹងដំបងជំរុញ 8. នៅ នៅពេលដំណាលគ្នានៅលើដងថ្លឹងមធ្យម 5 តាមរយៈអ័ក្ស 9 វីសនាំមុខ 10 ត្រូវបានម៉ោនដោយហ៊ីងដែលគ្រាប់ស្ថិតនៅ (គ្រាប់នៅក្នុងរូបភាពទី 34 មិនបានបង្ហាញ) ត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងអ័ក្ស 3 នៃដំបងតភ្ជាប់ 2 និងមាន សមត្ថភាពដូចជាគ្រាប់រំកិល ដើម្បីផ្លាស់ទីក្នុងចង្អូរកាំ 4 នៃដងថ្លឹងកម្រិតមធ្យម 5. នៅពេលដែលវីសនាំមុខ 10 បង្វិល ដំបងតភ្ជាប់ 2 បង្វិលនៅមុំមួយ។ αi ដែលនាំឱ្យមានការផ្លាស់ប្តូរទំហំនៃដៃនាំមុខនៃដងថ្លឹងកម្រិតមធ្យម 5 និងការផ្លាស់ប្តូរសមាមាត្រនៃប្រវែងនៃដៃជំរុញនិងបើកបររបស់វាធ្វើឱ្យវាអាចផ្លាស់ប្តូរតម្លៃដាច់សរសៃឈាមខួរក្បាលនៃដំបងជំរុញ 8 នៃយន្តការ។ ឧបករណ៍ដែលបានពិចារណាសម្រាប់ការលៃតម្រូវការដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលនៃយន្តការមានភាពខុសគ្នាពីអ្វីដែលបានពិភាក្សាពីមុនដែលវាអនុញ្ញាតឱ្យនៅពេលធ្វើការកែតម្រូវដើម្បីរក្សាទីតាំងដំបូងនៃតំណភ្ជាប់ទិន្នផល (ដំបង 8) ដែលត្រូវបានធានាដោយវត្តមាននៅក្នុង ដងថ្លឹងកម្រិតមធ្យម 5 នៃចង្អូរកាំ 4 ដែលជាចំណុចកណ្តាលដែលស្របគ្នានឹងអ័ក្សរង្វិល 1 ដូច្នេះនៅពេលធ្វើការកែតម្រូវ ការបង្វិលដំបងតភ្ជាប់ 2 មិនផ្លាស់ប្តូរទីតាំងនៃដងថ្លឹងកម្រិតមធ្យម 5 ទេ។

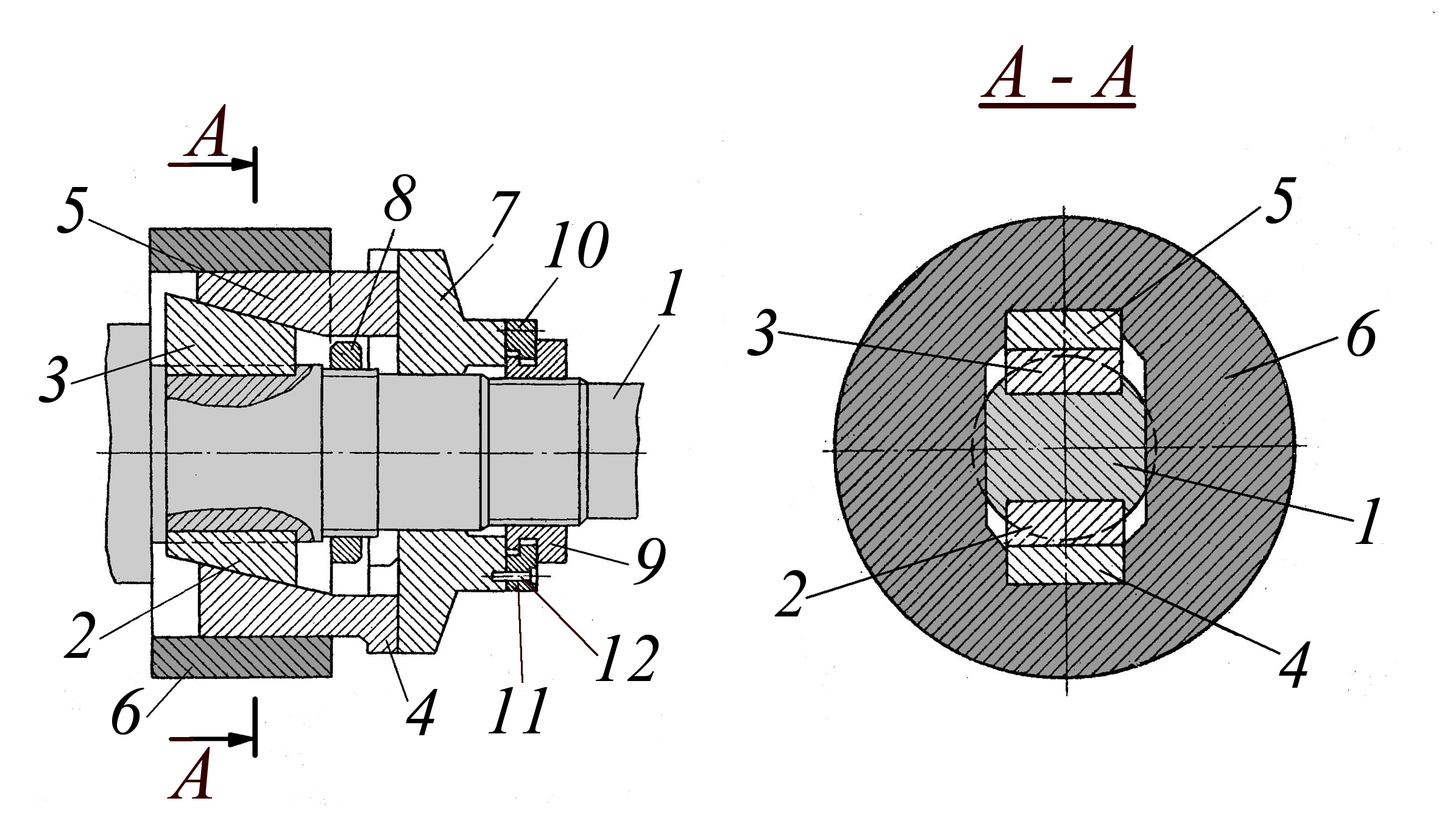
អង្ករ។ 25. ការរចនានៃ eccentric shaft ជាមួយនឹងតម្លៃ eccentricity លៃតម្រូវបាន។
នៅក្នុងរូបភព។ 25 បង្ហាញពីការរចនានៃ eccentric shaft ដែលក្នុងនោះ eccentricity របស់វាត្រូវបានកែតម្រូវដោយការបង្វិលដៃអាវ eccentric ដែលបានដំឡើងនៅលើផ្ទៃដែលត្រូវគ្នានៃ shaft ។ ការរចនាដែលបានស្នើឡើងនៃអ័ក្ស eccentric មាន shaft 2 នៅលើ eccentric neck 1 ដែលក្នុងនោះមាន eccentric sleeve 3 ជាមួយនឹង grooves 4 on the cylindrical surface in the cylindrical surface in which a key 5 can fit, located in the groove 8 of the ក eccentric 1 និងសម្រាកនៅលើម្រាមដៃ 6 និទាឃរដូវផ្ទុកដោយនិទាឃរដូវ 7 ក្នុងករណីនេះចិញ្ចៀន 9 និង 10 ត្រូវបានដំឡើងនៅចុងគន្លឹះ 5 ដែលនីមួយៗមានរន្ធ 11 នៅខាងក្នុង កំណត់ដោយផ្ទៃវង់ 16 ជាមួយនឹងអតិបរមា។ ជម្រៅស្មើនឹងកម្ពស់នៃចង្អូរ 4. សម្រាប់ការជួសជុលអ័ក្សនៃចិញ្ចៀន 9 និង 10 និងប៊ូស eccentric 3 នៅក្នុង grooves eccentric ទិនានុប្បវត្តិ 1 នៃ shaft 2 ត្រូវបានបំពាក់ដោយចិញ្ចៀនពាក់កណ្តាល 12, ជួសជុលយ៉ាងតឹងរឹងនៅក្នុងពួកគេនិងសម្រាប់ fixation ។ នៅក្នុងទិសដៅរ៉ាឌីកាល់ ការគៀបបាល់ដែលផ្ទុកដោយនិទាឃរដូវ 13 ត្រូវបានម៉ោននៅក្នុងចិញ្ចៀនអាពាហ៍ពិពាហ៍ 9 និង 10 ។ ដើម្បីបង្វិលចិញ្ចៀននោះ រន្ធ 14 ត្រូវបានធ្វើឡើងនៅក្នុងពួកវា ហើយសម្រាប់ការបង្វិលដៃអាវ eccentric 3 រន្ធ 15 ត្រូវបានធ្វើឡើងនៅក្នុងវា។
ដៃអាវ eccentric 3 ត្រូវបានកែតម្រូវដូចខាងក្រោម។ ចិញ្ចៀន 9 និង 10 ត្រូវបានបង្វិលតាមរន្ធដែលដំបងឬក្រវ៉ាត់កត្រូវបានបញ្ចូលរហូតដល់គន្លឹះ 5 ត្រូវបានដកចេញទាំងស្រុងពីចង្អូរ 4 នៃដៃអាវ eccentric 3. បន្ទាប់ពីនេះដៃអាវ eccentric 3 ត្រូវបានបង្វិលទៅមុំដែលត្រូវការ។ លទ្ធផលដែលតម្លៃនៃ eccentricity នៃ shaft 2 ផ្លាស់ប្តូរបន្ទាប់មក rings 9 និង 10 ត្រូវបានបង្វិលតាមរបៀបស្រដៀងគ្នារហូតដល់ key 5 ចូលទៅក្នុង groove ដែលត្រូវគ្នា 4 នៃ bushing eccentric និងចូលទៅក្នុង recess 11 in the rings ខណៈពេលដែលសម្រាក។ ផ្ទៃចំហៀង inclined របស់ខ្លួនប្រឆាំងនឹងផ្ទៃ inclined ដែលត្រូវគ្នានៃ recess 11. នេះគឺជាដំណើរការនៃការលៃតម្រូវទីតាំងនៃ eccentric bushing 3 បញ្ចប់។
អង្ករ។ 26. ការរចនាឧបករណ៍ក្រូចឆ្មារសម្រាប់ការកែតម្រូវដោយរលូននៃ eccentricity នៃ eccentric shaft ។
នៅក្នុងរូបភព។ 26 បង្ហាញពីការរចនាឧបករណ៍ក្រូចឆ្មារសម្រាប់ការកែតម្រូវដោយរលូននៃ eccentric shaft នេះ។ វាមានអ័ក្សដ្រាយ 1 ដែលក្រូចឆ្មារ 2 និង 3 ត្រូវបានម៉ោនដែលជាមួយនឹងផ្ទៃក្រូចឆ្មាររបស់ពួកគេមានទំនាក់ទំនងជាមួយផ្ទៃមិត្តរួមនៃក្រូចឆ្មារ 4 និង 5 ដែលមានលទ្ធភាពនៃចលនាអ័ក្សនៅក្នុងចង្អូរបណ្តោយនៃ eccentric 6 និង ចលនារ៉ាឌីកាល់នៅក្នុង grooves ដែលត្រូវគ្នានៃ flange 7, ក្រោយមកទៀតត្រូវបានដំឡើងនៅលើ shaft 1 ជាមួយនឹងលទ្ធភាពនៃចលនាអ័ក្សដោយមធ្យោបាយនៃ nut 9 ដែលមានទីតាំងនៅផ្នែកខ្សែស្រឡាយនៃ shaft នេះ។ ក្នុងករណីនេះ eccentric 6 ត្រូវបានជួសជុលនៅលើអ័ក្ស 1 ក្នុងទិសអ័ក្សដោយយចន 8 ហើយគ្រាប់ 9 ត្រូវបានភ្ជាប់ទៅ flange 7 ដោយប្រើចិញ្ចៀនពាក់កណ្តាល 10, 11 និងវីស 12 ។
ឧបករណ៍នេះដំណើរការដូចខាងក្រោម។ ប្រសិនបើវាចាំបាច់ដើម្បីផ្លាស់ប្តូរ eccentricity នៃ eccentric shaft 1 ដោយបង្វិលយចន 9 ផ្លាស់ទី flange 7 ក្នុងទិសដៅដែលចង់បានខណៈពេលដែល wedges 4 និង 5 រំកិលតាមបណ្តោយផ្ទៃមិត្តរួមនៃក្រូចឆ្មារ 2 និង 3 ជួសជុលទៅ shaft 1, ផ្លាស់ទីក្នុងទិសដៅអ័ក្សរួមគ្នាជាមួយ flange 7 និង sliding radially តាមបណ្តោយផ្ទៃនៃ groove បានធ្វើនៅក្នុងវា។ ជាលទ្ធផលនៃចលនានៃក្រូចឆ្មារ 4 និង 5 នោះ eccentric 6 ផ្លាស់ទីក្នុងទិសដៅរ៉ាឌីកាល់ បង្កើនឬបន្ថយ eccentricity នៃ eccentric shaft ។
ប្រសិនបើតំណភ្ជាប់ទិន្នផលនៃយន្តការដងថ្លឹងគឺជាគ្រាប់រំកិល នោះទីតាំងដំបូង ឬចុងក្រោយរបស់វាត្រូវបានកែតម្រូវដោយការផ្លាស់ប្តូរប្រវែងនៃដំបងតភ្ជាប់ដែលភ្ជាប់ទៅវា ហើយប្រសិនបើតំណភ្ជាប់លទ្ធផលនៃយន្តការដងថ្លឹងគឺជាដៃចង្កូត ឬដៃរ៉ក នោះវា ទីតាំងមុំត្រូវបានកែតម្រូវ។ ចូរយើងពិចារណាឧទាហរណ៍នៃការរចនាឧបករណ៍សម្រាប់លៃតម្រូវទីតាំងនៃតំណភ្ជាប់ទិន្នផលនៃយន្តការ lever មួយ។

រូបភាពទី 27 យន្ដការ Lever ជាមួយនឹងការលៃតម្រូវដំបូង
ទីតាំងតំណភ្ជាប់លទ្ធផល
រូបភាពទី 27 បង្ហាញពីការរចនានៃយន្តការដងថ្លឹង ដែលការបញ្ជូនចលនាពីអ័ក្ស eccentric ទៅ pusher ត្រូវបានអនុវត្តតាមរយៈ lever ដៃពីរកម្រិតមធ្យម។ វាមានអ័ក្ស eccentric 1, ដំបងតភ្ជាប់ដែលមានលំនៅដ្ឋាន 2 ដែលត្រូវបានម៉ោននៅលើ crank pin នៃ eccentric shaft និង rod មួយ 3, ចុងខ្សែស្រឡាយដែលត្រូវបានតភ្ជាប់ទៅគ្នាទៅវិញទៅមកដោយ coupling ខ្សែស្រឡាយ 4, ទីតាំងដែលជា ជួសជុលដោយគ្រាប់សោ 5 ក៏ដូចជាដៃចង្កូតទ្វេ 7 ដែលត្រូវបានម៉ោននៅលើអ័ក្ស 8 នៅលើដៃជំរុញដែល roller 10 ត្រូវបានតំឡើងនៅលើអ័ក្ស 9 ដែលមានទំនាក់ទំនងថេរជាមួយអ្នករុញ 11 ។ ការរចនានៃដំបងតភ្ជាប់អនុញ្ញាតឱ្យដោយការលៃតម្រូវប្រវែងរបស់វាដោយវីសឬ unscrewing ចុងខ្សែស្រឡាយនៃរាងកាយ 2 និងដំបង 3 ចូលទៅក្នុង coupling 4 ដើម្បីផ្លាស់ប្តូរទីតាំងដងថ្លឹង 7 ហើយតាមនោះទីតាំងដំបូងនៃ pusher 11, តើអ្វីដែលចាំបាច់នៅពេលរៀបចំយន្តការជាផ្នែកមួយនៃឧបករណ៍?

រូបភាពទី 28 យន្តការ crank ជាមួយឧបករណ៍សម្រាប់ផ្លាស់ប្តូរប្រវែងនៃដំបងតភ្ជាប់
រូបភាពទី 28 បង្ហាញពីការរចនានៃយន្តការដំបងតភ្ជាប់ crankshaft នៃសារពត៌មានដែលក្នុងនោះទីតាំងដំបូងនៃគ្រាប់រំកិលត្រូវបានកែតម្រូវដោយការផ្លាស់ប្តូរប្រវែងនៃដំបងតភ្ជាប់។ វាមានដំបងតភ្ជាប់ 1 ដែលបានតំឡើងនៅលើម្ជុល crank 3 នៃ crankshaft និងភ្ជាប់ទៅនឹងគ្រាប់រំកិល 5 នៃយន្តការ crank តាមរយៈ bushing eccentric 2 និងអ័ក្ស 4 ដែលមានទីតាំងនៅក្នុងរន្ធរបស់វាខណៈពេលដែលនៅក្នុងភ្នែក 7 នៃ bushing eccentric 3 an អ័ក្ស 8 ជាមួយនឹងប៊ូស 9 ត្រូវបានម៉ោនដោយស្នូលនៅក្នុងខ្សែដែលផ្លាស់ទីឆ្ងាយពីដែលវីសកែតម្រូវ 10 មានទីតាំងនៅ ការគាំទ្របាល់ 12 នៃវីស 10 ត្រូវបានតំឡើងនៅក្នុងកញ្ចក់ 14 នៅលើទ្រនាប់រុញ 15 និងត្រូវបានជួសជុលដោយគម្រប 17 ។ ខណៈពេលដែល shank ការ៉េ 16 នៃវីសត្រូវបានឆ្លងកាត់រន្ធនៅក្នុងគម្រប 17 ។ ដំបងតភ្ជាប់ 1 មានទំនាក់ទំនងជាមួយ crankpin 3 នៃ crankshaft ដោយមធ្យោបាយនៃការរុញ bearing 18 ជាមួយនឹង bushing eccentric 2 ដោយមធ្យោបាយនៃការ slider bearing 19 និង bushing eccentric 2 ជាមួយអ័ក្ស 4 ដោយមធ្យោបាយនៃ sliding bearing 20 ។ ទិសអ័ក្ស អ័ក្ស 4 ត្រូវបានជួសជុលជាមួយនឹង washer 21 និង bolts 22 ។
ដើម្បីផ្លាស់ប្តូរប្រវែងនៃដំបងតភ្ជាប់ 1 វីសលៃតម្រូវ 10 ត្រូវបានបង្វិលដោយក្បាលការ៉េ 16 ក្នុងទិសដៅដែលចង់បានដែលនៅពេលដែលវីសចូលឬដោះវីសពីដៃអាវដែលមានខ្សែស្រឡាយ 9 បង្ខំឱ្យដៃអាវ eccentric 2 បង្វិលជុំវិញអ័ក្ស 4 ។ ហើយដោយហេតុនេះ ផ្លាស់ប្តូរទីតាំងនៃអ័ក្សរបស់វា ប្រវែង ឬដោយការធ្វើឱ្យខ្លីនៃដំបងតភ្ជាប់ 1 ដែលនាំទៅដល់ការផ្លាស់ប្តូរទីតាំងដំបូងនៃគ្រាប់រំកិល 5
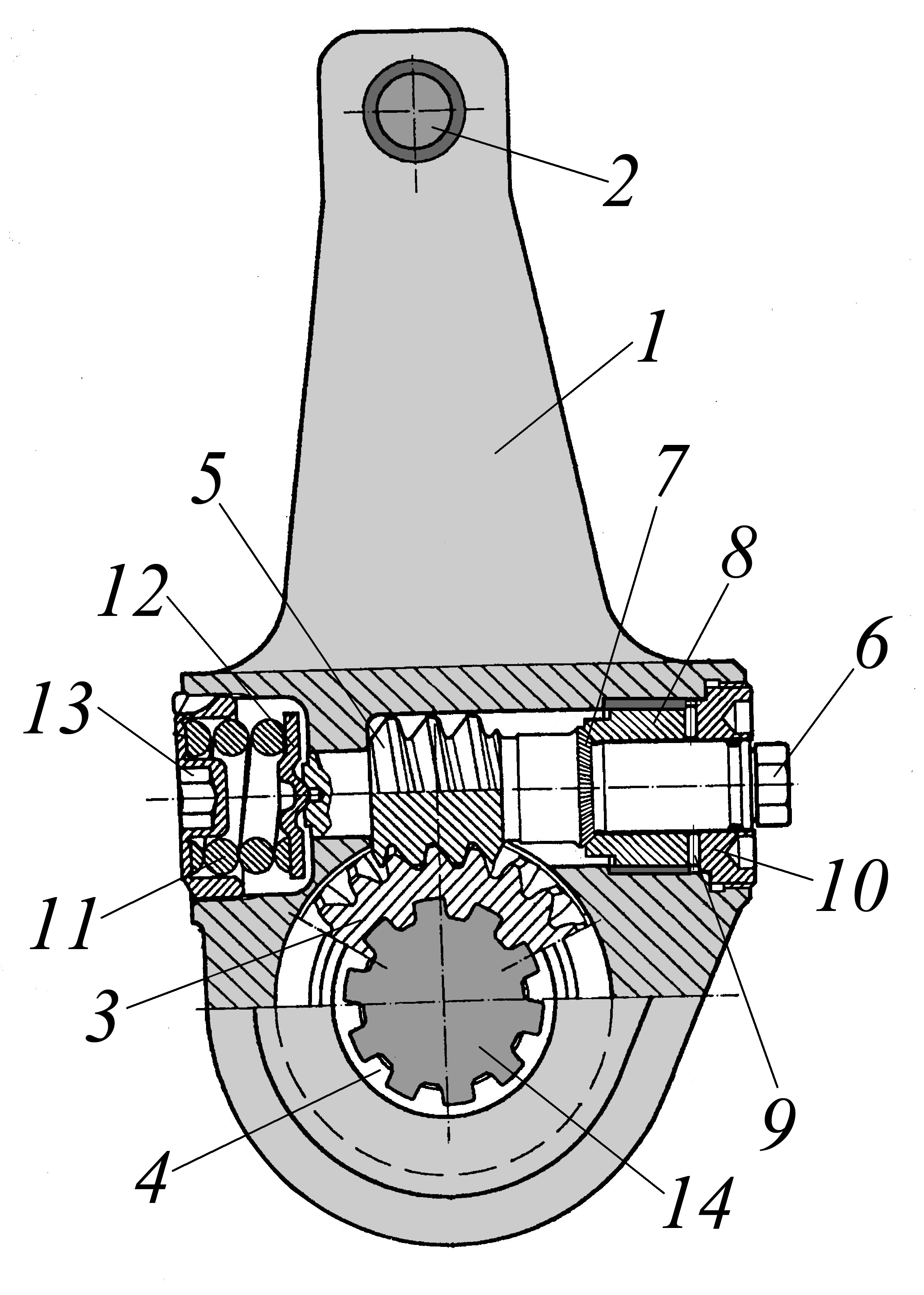
រូបភាពទី 29 រ៉កដែលមានឧបករណ៍ភ្ជាប់មកជាមួយសម្រាប់កែតម្រូវទីតាំងមុំរបស់វា។
រូបភាពទី 29 បង្ហាញពីការរចនានៃឧបករណ៍ដែលបានបង្កើតឡើងនៅក្នុងដៃ rocker ដែលអនុញ្ញាតឱ្យអ្នកលៃតម្រូវទីតាំងមុំរបស់វាទាក់ទងទៅនឹងអ័ក្សដែលវាត្រូវបានដំឡើង។ ឧបករណ៍នេះដែលត្រូវបានបង្កើតឡើងនៅក្នុងដៃ rocker 1 ដែលត្រូវបានតភ្ជាប់យ៉ាងសំខាន់តាមអ័ក្ស 2 ទៅដំបងដ្រាយនៃយន្តការ lever មានកង់ដង្កូវ 3 ដែលមានទីតាំងនៅរន្ធនៃដៃ rocker និងជាមួយ splines ខាងក្នុងរបស់វា 4 ទំនាក់ទំនង splined ។ ផ្ទៃនៃអ័ក្ស 14 និងក៏ភ្ជាប់ជាមួយដង្កូវ 5 ដែលបានដំឡើងនៅក្នុងការអផ្សុកនៃដៃរ៉ុកដែលផលិតកាត់កែងទៅនឹងអ័ក្សនៃកង់ដង្កូវ។ ក្នុងករណីនេះទិនានុប្បវត្តិខាងឆ្វេងនៃដង្កូវ 5 ជាមួយនឹងចុងឆកោន 6 ត្រូវបានដាក់ក្នុងរន្ធនៅក្នុងគម្រប 10 តាមរយៈសំណុំនៃ rollers 9 គឺទាក់ទងជាមួយដៃអាវ 8 នៅខាងស្ដាំនៃធ្មេញរាងសាជី។ 7, ទាក់ទងធ្មេញមិត្តរួមបង្កើតនៅលើដង្កូវ 5, បង្កើតការភ្ជាប់ពាក្យ។ ចុងខាងឆ្វេងនៃដង្កូវ 5 ជាមួយនឹងរន្ធរាងសាជីកណ្តាលរបស់វាមានទំនាក់ទំនងជាមួយផ្ទៃមិត្តរួមរបស់ឧបករណ៍បោកគក់យឺត 12 ដែលត្រូវបានសង្កត់ដោយនិទាឃរដូវ 11 និងគម្រប 13 ។
ការលៃតម្រូវទីតាំងមុំរបស់រ៉ក 1 ទាក់ទងទៅនឹងអ័ក្ស 14 ត្រូវបានអនុវត្តដូចខាងក្រោម។ ដើម្បីបង្វែររ៉ក 1 ក្នុងទិសដៅមួយ ឬទិសដៅមួយទៀត ដង្កូវ 5 ត្រូវបានបង្វិលដោយក្បាលឆកោន 6 ជាមួយនឹង wrench ក្នុងទិសដៅដែលចង់បាន ខណៈពេលដែលការបង្វិលរបស់វាត្រូវបានបញ្ជូនទៅកង់ដង្កូវ 3 ដែលត្រូវបានជួសជុលដោយមធ្យោបាយនៃការភ្ជាប់ splined ។ នៅលើ shaft 14, នៅតែមិនមានចលនា, ហើយ rocker 1 បង្វិលនៅក្នុងផ្នែកទិសដែលចង់បាន, ការផ្លាស់ប្តូរទីតាំងមុំរបស់ខ្លួនទាក់ទងទៅនឹង shaft 14 ។
គ្រាប់រំកិលនៃយន្តការ crank និង rod ភ្ជាប់ដែលជា actuator នៃឧបករណ៍បច្ចេកវិទ្យា ជាពិសេសការចុចមេកានិចគឺស្ថិតនៅក្រោមតម្រូវការយ៉ាងតឹងរឹងសម្រាប់ទីតាំងនិងចលនារបស់ពួកគេទាក់ទងទៅនឹងផ្នែកមូលដ្ឋាននៃឧបករណ៍ (សម្រាប់ការចុចមេកានិចនេះគឺជាតម្រូវការ។ សម្រាប់ភាពកាត់កែងនៃគ្រាប់រំកិលទៅផ្ទៃមូលដ្ឋាននៃតារាង) ដូច្នេះ មគ្គុទ្ទេសក៍គ្រាប់រំកិលមានឧបករណ៍សមរម្យសម្រាប់កែតម្រូវទីតាំងរបស់វា។

រូបភាពទី 30 ការរចនាឧបករណ៍ដែលអនុញ្ញាតឱ្យអ្នកលៃតម្រូវទីតាំងរបស់គ្រាប់រំកិល
នៅក្នុងយន្តហោះពីរ។
រូបភាពទី 30 បង្ហាញពីការរចនាឧបករណ៍ដែលអនុញ្ញាតឱ្យអ្នកលៃតម្រូវទីតាំងរបស់គ្រាប់រំកិលក្នុងយន្តហោះពីរ។ ឧបករណ៍នេះមានមគ្គុទ្ទេសក៍ 4 ស្លាយ 10 ដែលបានដំឡើងនៅលើស៊ុម 1 ជាមួយនឹងលទ្ធភាពនៃការលៃតម្រូវនៅក្នុងយន្តហោះពីរក៏ដូចជាប៊ូសដែលមានខ្សែស្រឡាយ 3 ដែលបានដំឡើងនៅក្នុងរន្ធខ្សែស្រឡាយនៃមគ្គុទ្ទេសក៍ 4 នៅក្នុងការទំនាក់ទំនងជាមួយស៊ុម 1 តាមរយៈ washer ស្វ៊ែរ 7 និង ម្ជុលលេខ 14 ក៏ដូចជាឧបករណ៍លាងចានរាង 9 ដែលមានក្បាលឆកោន និងរាងចតុកោណកែងដែលដើរតួជាមគ្គុទ្ទេសក៍ក្នុងការទំនាក់ទំនងជាមួយចង្អូរមិត្តរួមនៅក្នុងប៊ូសដែលមានខ្សែស្រឡាយ 3 និងយចន 12។ ដើម្បីកែតម្រូវទីតាំងនៃមគ្គុទ្ទេសក៍នៅក្នុងយន្តហោះខាងមុខ សូមបន្ធូរ វីស 8 និងដោយការបង្វិល washer រាង 9 ផ្លាស់ទីប៊ូស 3 នៅក្នុងរន្ធខ្សែស្រឡាយនៃអ័ក្ស 2 ដែលនាំទៅដល់ការផ្លាស់ប្តូរទីតាំងនៃមគ្គុទ្ទេសក៍ 4. បន្ទាប់ពីបំពេញបរិមាណដែលត្រូវការនៃការលៃតម្រូវវីស 8 ត្រូវបានរឹតបន្តឹង លៃតម្រូវទីតាំងនៃមគ្គុទ្ទេសក៍នៅក្នុងយន្តហោះដែលកាត់កែងទៅផ្នែកខាងមុខការរឹតបន្តឹងនៃគ្រាប់ 12 ត្រូវបានបន្ធូរហើយតាមរបៀបដូចគ្នាដោយការបង្វិលគ្រាប់រាង 9 មគ្គុទ្ទេសក៍ 4 ត្រូវបានផ្លាស់ប្តូរទៅបរិមាណដែលត្រូវការបន្ទាប់មកគ្រាប់ 12 ត្រូវបានរឹតបន្តឹង។
នៅក្នុងយន្តការ crank ដែលដំណើរការជាផ្នែកមួយនៃឧបករណ៍បច្ចេកវិជ្ជា កម្លាំងអតិបរិមាកើតឡើងនៅពេលដែលម្ជុល crank នៃ eccentric shaft ត្រូវបានបង្វិលនៅក្នុងតំបន់± 15 ដឺក្រេដែលទាក់ទងទៅនឹងចំណុចខាងលើ និងខាងក្រោម ដែលជាលទ្ធផលនៃកម្លាំងបង្វិលជុំដែលមិនមាន។ អតិបរមា ហើយដូច្នេះការរចនាដែលគេស្គាល់នៃឧបករណ៍សុវត្ថិភាព (ក្ដាប់សុវត្ថិភាពដែលបានបង្កើតឡើងនៅក្នុងដ្រាយយន្តការ) មិនការពារវាពីការលើសទម្ងន់ដែលអាចកើតមាននោះទេ។ នៅក្នុងការតភ្ជាប់ជាមួយនេះឧបករណ៍សុវត្ថិភាពត្រូវបានបង្កើតឡើងដោយផ្ទាល់ទៅក្នុងតំណភ្ជាប់នៃយន្តការ crank នេះ។
រូបភាពទី 31 ជម្រើសនៃការរចនាសម្រាប់ឧបករណ៍សុវត្ថិភាពដែលបានបង្កើតឡើងនៅក្នុងដំបងតភ្ជាប់នៃយន្តការ crank ។
រូបភាពទី 31 បង្ហាញជម្រើសរចនាពីរសម្រាប់ឧបករណ៍សុវត្ថិភាពដែលបានបង្កើតឡើងនៅក្នុងដំបងតភ្ជាប់នៃយន្តការ crank ។ អ័ក្ស crank នៃយន្តការត្រូវបានធ្វើឡើងក្នុងមួយដុំជាមួយនឹងប្រអប់លេខ 1 ហើយម្ជុល crank 2 របស់វាត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងដំបងតភ្ជាប់ 3 ដែលនៅក្នុងវេនតាមរយៈអ័ក្ស 4 ត្រូវបានភ្ជាប់ទៅនឹងដៃ rocker 5 ដែលបានម៉ោននៅលើស៊ុមដោយប្រើ អ័ក្ស 6 និងតាមអ័ក្ស 7 ត្រូវបានភ្ជាប់ទៅនឹងការផ្គុំ ដំបងតភ្ជាប់ដែលមានផ្នែកបើកបរ 8 និងផ្នែកជំរុញ 9 ភ្ជាប់គ្នាទៅវិញទៅមកដោយអ័ក្ស 10 ជាមួយនឹងប៊ូឡុងសុវត្ថិភាព 13 (សូមមើលរូបភាព 31a) ខណៈពេលដែលការភ្ជាប់ ដំបងត្រូវបានភ្ជាប់ទៅនឹងគ្រាប់រំកិល 12 តាមរយៈអ័ក្ស 11។ នៅពេលដែលបន្ទុកកើនឡើង ប៊ូឡុងសុវត្ថិភាពដែលធ្វើសកម្មភាពលើគ្រាប់រំកិល 12 លើសពីការបំបែកដែលអាចអនុញ្ញាតបាន 13 ផ្នែក ផ្នែកនៃដំបងតភ្ជាប់ 8 និង 9 បង្វិលទាក់ទងគ្នាទៅវិញទៅមកនៅលើអ័ក្ស 10 និងចលនា។ ពី crank shaft ទៅ slider 12 មិនត្រូវបានបញ្ជូនដែលធានាថាផ្នែកស្មុគស្មាញនៃយន្តការត្រូវបានរារាំងពីការបំបែក។ បន្ទាប់ពីលុបបំបាត់មូលហេតុនៃការកើនឡើងនៃកម្លាំងដែលធ្វើសកម្មភាពលើគ្រាប់រំកិល 12 និងការជំនួសប៊ូឡុងសុវត្ថិភាព 13 យន្តការអាចបន្តដំណើរការបាន។
រូបភាពទី 31b បង្ហាញពីកំណែនៃយន្តការដែលមានយន្តការសុវត្ថិភាពកំណត់ឡើងវិញដោយខ្លួនឯងដែលភ្ជាប់មកជាមួយ។ វាមានដំបងតភ្ជាប់មួយដុំ 16 ភ្ជាប់ដោយអ័ក្ស 15, 17 និងដងថ្លឹងអាវុធពីរកម្រិតមធ្យម 14 ជាមួយនឹងគ្រាប់រំកិល 12 និងដងថ្លឹង 14 ដោយអ័ក្ស 18 ដំបង 19 និងដងថ្លឹងប្រដាប់អាវុធ 20 ។ បានម៉ោនដោយហ៊ីងដោយមធ្យោបាយនៃអ័ក្ស 21 នៅលើដំបងតភ្ជាប់ 16 តាមរយៈនិទាឃរដូវបង្ហាប់ 22 ភ្ជាប់ទៅនឹង protrusion 23 នៃដៃរ៉ុក 5. នៅពេលដែលបន្ទុកកើនឡើង និទាឃរដូវ 22 ដែលដើរតួនៅលើគ្រាប់រំកិល 12 លើសពីដែនកំណត់ដែលអាចអនុញ្ញាតបាន ហើយ ដំបងតភ្ជាប់ 16 និងដងថ្លឹងដៃពីរ 14 នៅលើអ័ក្ស 15 បង្វិលទាក់ទងគ្នាទៅវិញទៅមកដូច្នេះលុបបំបាត់ការផ្ទេរចលនាពីអ័ក្ស crank ទៅគ្រាប់រំកិល។ បន្ទាប់ពីលុបបំបាត់ហេតុផលនៃការកើនឡើងនៃកម្លាំងដែលធ្វើសកម្មភាពលើគ្រាប់រំកិល 12 និទាឃរដូវ 22 ត្រឡប់ទៅទីតាំងដើមវិញដោយត្រលប់មកវិញនូវផ្នែកទាំងអស់នៃឧបករណ៍សុវត្ថិភាព (ដងថ្លឹង 14 ដំបង 19 និងដងថ្លឹង 20) ដែលជាលទ្ធផលនៃយន្តការ។ អាចបន្តដំណើរការបាន។

អង្ករ។ 32. ការរចនានៃ tilter actuator សម្រាប់ផ្ទេរផលិតផលរវាង conveyors ដែលមានទីតាំងនៅកម្ពស់ផ្សេងគ្នា។
នៅក្នុងរូបភព។ 32 បង្ហាញពីការរចនានៃ tilter សម្រាប់ការផ្ទេរផលិតផលរវាង conveyors ដែលមានទីតាំងនៅកម្រិតផ្សេងគ្នានៅក្នុងកម្ពស់ដែលធ្វើឡើងដោយយោងទៅតាមការរចនានៃរចនាសម្ព័ន្ធ 4-bar articulated ដែលក្នុងនោះ cylindrical gears និង bevel gears ត្រូវបានបង្កើតឡើងដែលអនុញ្ញាតឱ្យផ្នែកនេះ ផ្លាស់ប្តូរទីតាំងរបស់វានៅពេលផ្លាស់ទី។ វាត្រូវបានម៉ោននៅលើ rack 1 ដែលត្រូវបានដំឡើងរវាង conveyors 2 និង 3 ដែលមានទីតាំងនៅកម្ពស់ផ្សេងគ្នា យន្តការផ្ទេរ tilter ត្រូវបានធ្វើឡើងនៅក្នុងទម្រង់នៃ hinge តំណបួនដែលបំពាក់ដោយយន្តការចាប់ផលិតផលជាមួយនឹងដ្រាយបង្វិលមួយ។ យន្តការផ្ទេរមានអ័ក្ស 4 និងអ័ក្ស 5 ដែលដាក់នៅលើទ្រនាប់ក្នុងរន្ធនៃ rack 1 ជាមួយនឹង levers 6 និង 7 ភ្ជាប់ជាមួយពួកគេ និង counterweight 8 បានម៉ោននៅលើចុងម្ខាងនៃ shaft 5, gear 9 បានម៉ោននៅលើ។ អ័ក្ស 5 និងសំណាញ់ជាមួយ rack 10 ភ្ជាប់យ៉ាងតឹងរ៉ឹងជាមួយដំបងស៊ីឡាំងធារាសាស្ត្រ 11 ដែលបានម៉ោននៅលើ rack 1 ។ ចុងទល់មុខនៃ levers 6 និង 7 ត្រូវបានម៉ោនយ៉ាងសំខាន់នៅក្នុងលំនៅដ្ឋាន 13 ដោយមធ្យោបាយនៃ gear shaft 14 និងអ័ក្សមួយ។ 15, ខណៈពេលដែល shaft ប្រអប់លេខ 14 ភ្ជាប់ជាមួយ gear 22 បានម៉ោនដោយសេរីនៅលើ shaft 16 នៃដ្រាយបង្វិលនៃផលិតផលយន្តការក្តាប់និងបានតភ្ជាប់ទៅវាដោយមធ្យោបាយនៃកម្មវិធីបញ្ជា 21 និង flange 20. gripper ផលិតផលត្រូវបានធ្វើឡើងនៅក្នុងទម្រង់ នៃម្ជុលលេខ 29 ដែលត្រូវបានម៉ោនយ៉ាងតឹងរ៉ឹងនៅលើ shafts 17 និងមានពីរឈប់ 30 និង 31 ដែលកំណត់ការបង្វិលរបស់ shaft 17. ដ្រាយបង្វិលនៃ gripper ផលិតផលមានភ្ជាប់នៅលើ shafts 16 និង 17 និង meshed bevel gears 18 និង 19 និង a ឧបករណ៍និទាឃរដូវមានប្លុក 24 កន្លែងចលនវត្ថុ 25 និង 26 និងស្ទ្រីម 27 និង 28 ដែលមានទីតាំងនៅរន្ធ annular 23 នៃប្រអប់លេខ 22 ។
ឧបករណ៍នេះដំណើរការដូចខាងក្រោម។ នៅក្នុងទីតាំងដំបូងផលិតផលដែលមានរាងដូចកញ្ចក់ស៊ីឡាំងមានទីតាំងនៅលើ rollers 32 នៃ conveyor ខាងលើ 2 ហើយម្រាមដៃ 29 ត្រូវបានបញ្ចូលទៅក្នុងរន្ធរបស់វា។ ដើម្បីផ្ទេរផលិតផលទៅកុងទ័រទាប 3 ស៊ីឡាំងធារាសាស្ត្រ 11 ត្រូវបានបើក ហើយដំបងរបស់វាភ្ជាប់យ៉ាងតឹងរ៉ឹងទៅនឹង rack 10 ត្រូវបានដកថយ ខណៈដែលប្រអប់លេខ 9 បង្វិលតាមទ្រនិចនាឡិកា និងបង្វិលអ័ក្ស 5 ក្នុងទិសដៅដូចគ្នា ដែលបង្វែរដងថ្លឹង 7 ជាលទ្ធផលនៅក្នុងយន្តការផ្ទេររួមគ្នាជាមួយនឹងលំនៅដ្ឋាន 13 និងផលិតផលដែលមានទីតាំងនៅលើម្រាមដៃ 29 ធ្វើឱ្យផ្ទះល្វែងមួយ - ចលនាស្របគ្នាដូច្នេះផលិតផលចូលទៅក្នុង conveyor 3 នៅក្នុងទីតាំងផ្ដេកមួយ។ ក្នុងពេលដំណាលគ្នាជាមួយនឹងការបង្វិលដងថ្លឹងលេខ 6 និង 7 ផលិតផលបង្វិលជុំវិញអ័ក្សបញ្ឈរនៅមុំ 180 ដឺក្រេដែលកើតឡើងដោយសារតែការបង្វិលនៃដងថ្លឹងលេខ 6 និង 7 ការបង្វិលនៃប្រអប់លេខ 14 បញ្ជូនទៅប្រអប់លេខ។ 22 ហើយបន្ទាប់មកតាមរយៈ bevel gears 18 និង 19 ទៅ shaft 17 ដែល pin 29 ត្រូវបានជួសជុល ដើម្បីឱ្យផលិតផលនៅពេលបង្វិលអ័ក្សបញ្ឈរនៅដើមចលនាមិនត្រូវប៉ះ rollers 32 នៃ conveyor ខាងលើ។ 2 និងដើម្បីធានាបាននូវគម្លាតដែលបានធានារវាងពួកវានៅពេលបង្វិលប្រអប់លេខ 14 កង់ប្រអប់លេខដែលបានតំឡើងនៅលើផ្លុំ 16 22 ក្នុងអំឡុងពេលនៃការបង្ហាប់ដំបូងនៃនិទាឃរដូវ 27 បង្វិលដោយសេរីដោយមិនបញ្ជូនការបង្វិលទៅអ័ក្ស 17 ជាមួយនឹងម្ជុល 29 ភ្ជាប់។ នៅពេលដែលផលិតផលត្រូវបានលើកពីលើ conveyor 2 ដែលអាចផ្លាស់ទីបានឈប់ 25 នៅក្រោមសកម្មភាពនៃនិទាឃរដូវដែលបានបង្ហាប់ 27 បញ្ជូនកម្លាំងទៅអ្នកបើកបរ 21 ដោយហេតុនេះបណ្តាលឱ្យអ័ក្ស 16 បង្វិលនិងតាមរយៈ bevel gears 18 និង 19, shaft ។ 17 ជាមួយ pin 29. បន្ទាប់ពីដំឡើងផលិតផលនៅលើ conveyor 3 នោះ drive របស់វាត្រូវបានបើក (មិនបង្ហាញក្នុងរូបភាព 32) ហើយផលិតផលទុក pin 29 ហើយផ្លាស់ទីក្នុងទិសដៅដែលត្រូវការ។ ភាពលំអៀងដែលត្រូវបានដោះលែងពីផលិតផលត្រឡប់ទៅទីតាំងដើមរបស់វាវិញហើយស៊ីឡាំងធារាសាស្ត្រ 11 ត្រូវបានបើកដំបងរបស់វាជាមួយនឹង rack 10 ពង្រីកនិងបង្វែរប្រអប់លេខ 9 ជាមួយនឹងអ័ក្ស 5 ច្រាសទ្រនិចនាឡិកាដែលជាលទ្ធផលនៃ levers 6 និង 7 ជាមួយនឹងតួ 13 ។ ហើយម្ជុលលេខ 29 បត់ក្នុងទិសដៅដូចគ្នា។ ក្នុងករណីនេះអ័ក្ស 17 ជាមួយម្ជុល 29 បង្វិលនៅមុំ 180 ដឺក្រេក្នុងទិសដៅផ្ទុយដែលត្រូវបានអនុវត្តដោយនិទាឃរដូវ 28 និងកន្លែងចលនវត្ថុ 26 ។

អង្ករ។ 33. ការរចនានៃយន្តការដំបងតភ្ជាប់ crank អនុញ្ញាតឱ្យគ្រាប់រំកិលលាយជាមួយនឹងការធ្លាក់ចុះក្នុងអំឡុងពេលជាក់លាក់នៃពេលវេលាមួយ។
ល្បឿនជិតដល់ថេរ។
នៅក្នុងរូបភព។ រូបភាពទី 33 បង្ហាញពីការរចនានៃយន្តការ crank រួមបញ្ចូលគ្នាជាមួយនឹងប្រព័ន្ធ lever-crank ដែលអនុញ្ញាតឱ្យគ្រាប់រំកិលផ្លាស់ទីក្នុងល្បឿនកាត់បន្ថយជិតនឹងថេរក្នុងរយៈពេលជាក់លាក់ណាមួយ។ យន្ដការនេះផ្ទុកនូវចង្កឹះលេខ 1 កាសែតជំនួយ 2 ដែលត្រូវបានម៉ោននៅក្នុងសត្វខ្លាឃ្មុំនៅលើស៊ុម ដៃចង្កូតទ្វេ 3 ដែលត្រូវបានម៉ោននៅលើម្ជុល crank នៃអ័ក្ស crank 1 និងភ្ជាប់តាមរយៈអ័ក្ស 6 ដោយដៃម្ខាងជាមួយនឹង ដំបងតភ្ជាប់ 4 និងគ្រាប់រំកិល 5 និងដៃម្ខាងទៀតដែលមានដំបង 7 ដែលត្រូវបានដំឡើងនៅក្នុងស្លាយទី 8 យោលនៅលើអ័ក្ស 9 ខណៈពេលដែលដំបង 7 ត្រូវបានភ្ជាប់ដោយស្នូលដោយសារតែអ័ក្ស 12 ជាមួយនឹងដៃរ៉ុក 11 ។ បានម៉ោននៅលើស៊ុមដោយមធ្យោបាយនៃអ័ក្ស 10. នៅពេលដែលគ្រាប់រំកិល 5 ផ្លាស់ទីចុះក្រោម ប្រព័ន្ធ rocker-lever ដែលមានដៃរ៉ុក 11, ដំបង 7, ស្លាយ 8 អនុវត្តការបង្វិលបន្ថែមនៃដៃចង្កូតពីរ 3 នៅជុំវិញ។ crank pin នៃ crank shaft 1 តាមទ្រនិចនាឡិកាដែលនាំឱ្យការពិតដែលថានៅពេលណាមួយល្បឿននៃគ្រាប់រំកិលថយចុះហើយតម្លៃរបស់វាកាន់តែជិតនឹងថេរ។ របៀបនៃចលនានៃស្លាយនេះគឺចាំបាច់នៅពេលអនុវត្តប្រតិបត្តិការបច្ចេកវិជ្ជាមួយចំនួនឧទាហរណ៍ គំនូរ។
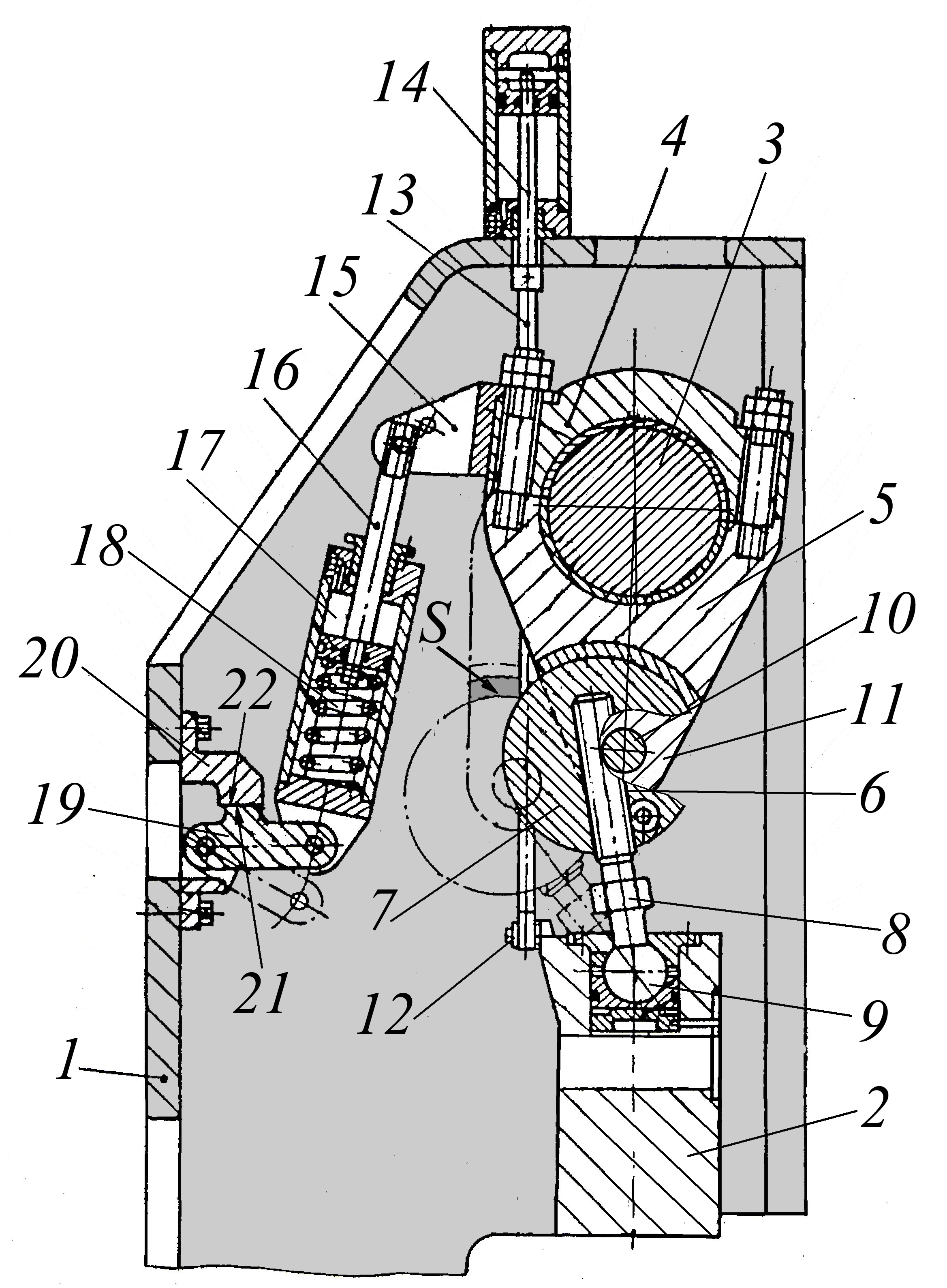
រូបទី 34 ការរចនានៃប្រដាប់បញ្ជូលដុំដែកនៃសារពត៌មានជាមួយនឹងឧបករណ៍ធ្វើឱ្យសកម្មដោយគ្មានក្ដាប់
រូបភាពទី 34 បង្ហាញពីការរចនានៃឧបករណ៍ភ្ជាប់ crank-connecting rod actuator នៃសារពត៌មានជាមួយនឹងឧបករណ៍សម្រាប់ដំណើរការ clutchless ដែល
ផលិតនៅលើមូលដ្ឋាននៃដំបងតភ្ជាប់បំបែក។ វាមានគ្រាប់រំកិល 2 ដែលបានដំឡើងនៅក្នុងមគ្គុទ្ទេសក៍នៃស៊ុម 1 ដែលទទួលបានដ្រាយចលនាច្រាសមកវិញពី crankshaft 3 តាមរយៈដំបងតភ្ជាប់ 4 ភ្ជាប់ទៅគ្រាប់រំកិល 2 ដោយប្រើ hinge ស្វ៊ែរ 9 ខណៈពេលដែលដំបងតភ្ជាប់ 4 មាន a ការបើកបរ 5 និងកែងដៃ 6 ដែលជំរុញ, ផ្ទៃរាងស៊ីឡាំងដែលបង្កើតជាសន្លាក់ hinge, ក្រោយមកទៀតមានថាស 7 និងវីសលៃតម្រូវ 8, និងថាស 7 ត្រូវបានធ្វើឡើងដោយ axles 10 ដែលមានទីតាំងស្ថិតនៅក្នុងរន្ធដែលត្រូវគ្នានៃភ្នែក 11 នៃ។ ការបើកបរផ្នែកទី 5 នៃដំបងតភ្ជាប់ 4. លើសពីនេះទៀត អ័ក្ស 10 មានទីតាំងនៅ eccentrically ទាក់ទងទៅនឹងអ័ក្សនៃឌីស 7 ដែលធានានូវវត្តមាននៃគម្លាតរវាងផ្ទៃស៊ីឡាំងនៃការបើកបរ 5 និងជំរុញ 6 ជង្គង់នៃការបំបែកការតភ្ជាប់។ ដំបង 4 ដែលចាំបាច់ក្នុងអំឡុងពេលទំនេរនៃយន្តការដំបងតភ្ជាប់ crank នៃសារពត៌មាន។ ដើម្បីធានាថាវាត្រូវបានធានានៅក្នុងទីតាំងដំបូងខាងលើ សូម្បីតែនៅពេលដែលកំណាត់តភ្ជាប់ដែលបំបែក 4 ស្ថិតនៅក្នុងទីតាំងបិទក៏ដោយ គ្រាប់រំកិល 2 ត្រូវបានភ្ជាប់ទៅនឹងដំបងតុល្យភាព 14 តាមរយៈអ័ក្ស 12 និងដំបង 13 ។ តង្កៀប 15 គឺ ត្រូវបានជួសជុលយ៉ាងតឹងរឹងទៅនឹងកែងដៃបើកបរ 5 នៃដំបងតភ្ជាប់ ដែលត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងដំបង 16 នៃស៊ីឡាំងខ្យល់គ្រប់គ្រង 17 យន្តការធ្វើឱ្យសកម្មដោយគ្មានក្ដាប់ ខណៈដែលរាងកាយរបស់វាត្រូវបានភ្ជាប់ជាស្នូលទៅនឹងតង្កៀប 20 ដែលបានម៉ោននៅលើជញ្ជាំងខាងក្រោយនៃសារពត៌មាន។ ស៊ុម 1, ដោយមធ្យោបាយនៃដៃរ៉ុក 19 ។ តង្កៀប 20 ត្រូវបានបំពាក់ជាមួយនឹងការព្យាករ 22 ហើយរ៉ក 19 ត្រូវបានបំពាក់ជាមួយនឹងការព្យាករ 21 ដែលមានលទ្ធភាពនៃអន្តរកម្មម្តងម្កាល។
យន្តការនេះដំណើរការដូចខាងក្រោម។ ជាមួយនឹងការបង្វិលថេរនៃ crankshaft 3 តាមការបញ្ជាពីប្រព័ន្ធស្វ័យប្រវត្តិកម្មអេឡិចត្រូ pneumatic ខ្យល់ដែលបានបង្ហាប់ត្រូវបានផ្គត់ផ្គង់ទៅបែហោងធ្មែញដំបងនៃស៊ីឡាំង pneumatic វត្ថុបញ្ជា 17 ជាលទ្ធផលនៃការនេះនិងអរគុណចំពោះការតភ្ជាប់យ៉ាងច្បាស់លាស់នៃរាងកាយស៊ីឡាំង pneumatic ជាមួយ ដៃរ៉ុក 19 ចលនាផ្ទុយទៅវិញទៅមកនៃដំបងរបស់វា 16 និងរាងកាយកើតឡើងដែលនាំទៅដល់ការបង្វិលដៃរ៉ុក 19 ប្រឆាំងនឹងទ្រនិចនាឡិកាហើយការលាតសន្ធឹងរបស់វា 21 ទល់នឹង protrusion 22 នៃតង្កៀប 20 និងដំបង 16 នៃ pneumatic ស៊ីឡាំងបង្ហាប់និទាឃរដូវ 18 ដើរតួនាទីនៅលើតង្កៀប 15 ដែលវាត្រូវបានតភ្ជាប់ដោយស្នូលហើយដោយហេតុនេះធានាថាការបើកបរ 5 និងជំរុញ 6 នៃដំបងតភ្ជាប់ 4 ត្រូវបានរក្សាទុកក្នុងទីតាំងបិទជិត (ដូចបង្ហាញក្នុងរូបភាពទី 34) ។ ក្នុងករណីនេះ ចលនាត្រូវបានផ្ទេរពី crankshaft 3 ទៅគ្រាប់រំកិល 2 តាមរយៈដំបងតភ្ជាប់បិទជិត 4. នៅពេលដែលការផ្គត់ផ្គង់ខ្យល់ដែលបានបង្ហាប់ចូលទៅក្នុងប្រហោងដំបងនៃស៊ីឡាំង pneumatic 17 ត្រូវបានបញ្ឈប់តាមបញ្ជាពីប្រព័ន្ធស្វ័យប្រវត្តិកម្ម electro-pneumatic ។ នៅក្រោមសកម្មភាពនៃ crankshaft បង្វិល 3 និងកម្លាំងនៃស្មើ 14, កែងដំបងតភ្ជាប់ 5 និង 6 កើតឡើង 4 និងយកផ្ទៃស៊ីឡាំងរបស់ពួកគេបង្កើត hinge ពីទំនាក់ទំនងដែលនាំឱ្យ, ដោយសារតែការដំឡើង eccentric នៃ axles 10 ទាក់ទងទៅនឹង អ័ក្សនៃឌីស 7 ដើម្បីបង្កើតគម្លាត S រវាងពួកវា។ បន្ទាប់មកជង្គង់ 5 និង 6 នៃដំបងតភ្ជាប់ 4 ចាប់ផ្តើមធ្វើចលនារញ្ជួយទាក់ទងទៅនឹងអ័ក្ស 10 ភ្ជាប់ពួកវាហើយគ្រាប់រំកិល 2 ស្ថិតនៅក្រោមឥទ្ធិពលនៃកម្លាំងនៃសមតុល្យ 14 ជាមួយនឹង crankshaft 3 បង្វិលជានិច្ចគឺស្ថិតនៅក្នុង ទីតាំងខាងលើបំផុត។ ក្នុងពេលជាមួយគ្នានៅក្រោមសកម្មភាពនៃនិទាឃរដូវ 18 តួនៃស៊ីឡាំង pneumatic 17 ផ្លាស់ទីនិងចុះក្រោមដោយសេរីហើយដៃរ៉ុក 19 បង្វិលតាមទ្រនិចនាឡិកា។ បន្ទាប់ពីតួនៃស៊ីឡាំង pneumatic 17 ឈានដល់ទីតាំងទាបបំផុតរបស់វាវាចាប់ផ្តើមធ្វើឱ្យរាបស្មើ - ចលនាប៉ារ៉ាឡែលដោយងាកទាក់ទងទៅនឹងចំណុចនៃការតភ្ជាប់ hinge ជាមួយតង្កៀប 15 និងដៃ rocker 19 ខណៈពេលដែលទទួលបានចលនាពី crankshaft 3 បង្វិល ក្នុងល្បឿនថេរជាមួយនឹងការផ្គត់ផ្គង់ខ្យល់ដែលបានបង្ហាប់ជាបន្តបន្ទាប់ទៅក្នុងស៊ីឡាំងខ្យល់ 17 គ្រាប់រំកិល 2 ធ្វើឱ្យដាច់សរសៃឈាមខួរក្បាល។
យន្តការដង្កៀប។
ការរួមបញ្ចូលគ្នានៃយន្តការ lever ជាមួយ gears ធ្វើឱ្យវាអាចធ្វើទៅបានដើម្បីបង្កើតយន្តការជាមួយនឹងលក្ខណៈសម្បត្តិថ្មីដែលមិនមានលក្ខណៈសម្រាប់ទាំងពីរ។ ភាគច្រើនជាញឹកញាប់ យន្តការបែបនេះត្រូវបានប្រើដើម្បីទទួលបានកម្ពស់នៃតំណភ្ជាប់ទិន្នផល ប៉ុន្តែក្នុងករណីខ្លះ ពួកគេអាចធ្វើឱ្យវាអាចទទួលបានគន្លងនៃចលនាផ្សេងគ្នានៃតំណភ្ជាប់ទិន្នផល ក៏ដូចជាផ្លាស់ប្តូរទំហំ និងល្បឿននៃចលនារបស់វា។
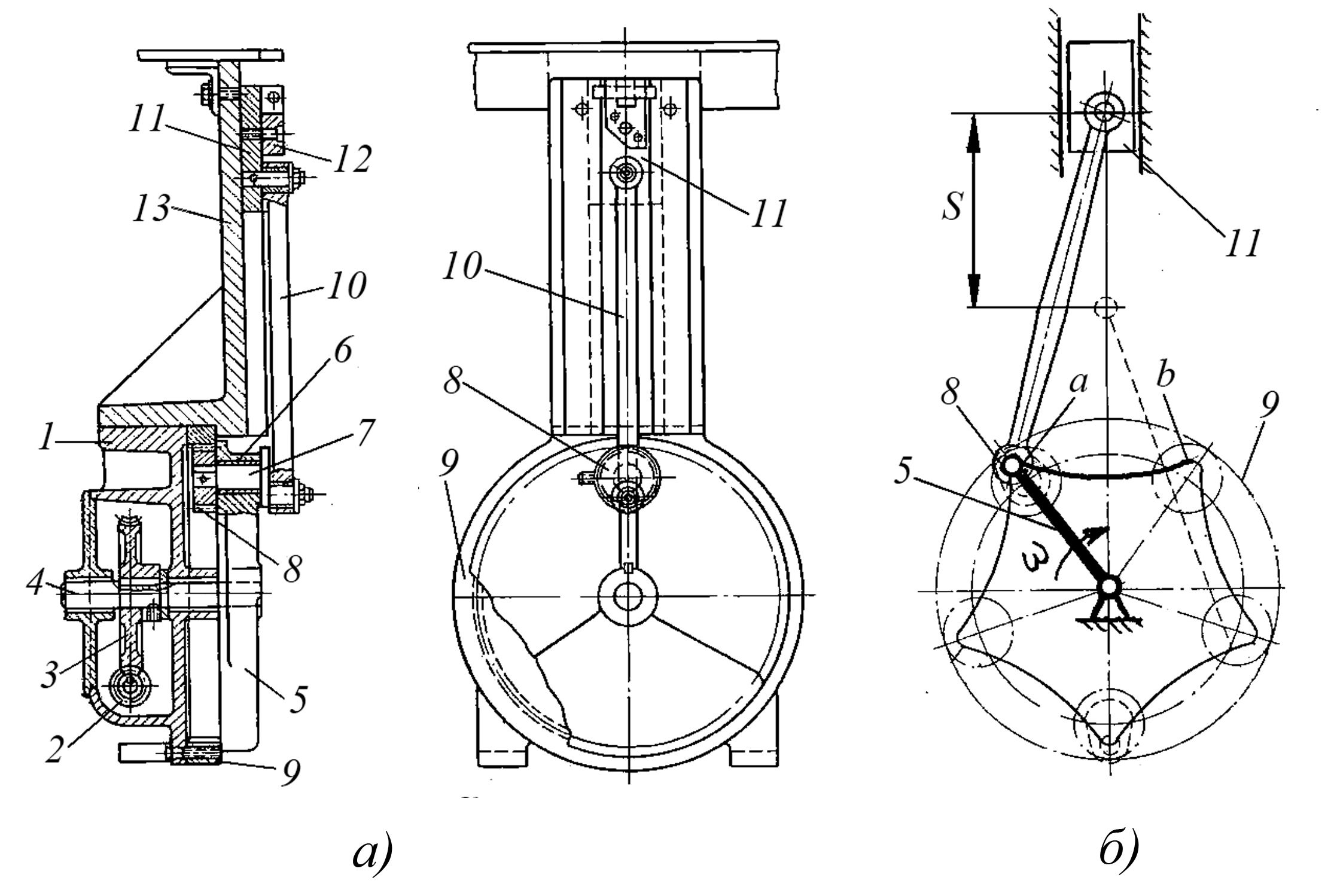
រូបភាពទី 35 ការរចនានៃយន្តការដងថ្លឹងប្រអប់លេខ តំណភ្ជាប់ទិន្នផលដែល - គ្រាប់រំកិលនៅក្នុងទីតាំងទៅមុខខ្លាំងធ្វើឱ្យវាឈរ។
រូបភាពទី 35 បង្ហាញពីការរចនានៃយន្តការ gear-lever តំណភ្ជាប់ទិន្នផលដែលគ្រាប់រំកិលនៅក្នុងទីតាំងទៅមុខខ្លាំងធ្វើឱ្យឈប់នៅមុំជាក់លាក់នៃការបង្វិលនៃតំណភ្ជាប់ដ្រាយ - crank ។ វាមានលំនៅ 1 ដែលក្នុងនោះឧបករណ៍ដង្កូវ 2, 3 មានទីតាំងនៅហើយនៅលើអ័ក្សជំរុញរបស់វា 4 crank 5 ត្រូវបានជួសជុលដែលជាឧបករណ៍ផ្ទុកភពនៅក្នុងរន្ធដែលម្ជុល eccentric 7 ត្រូវបានតំឡើងនៅលើធម្មតា bearing 6 នៅចុងម្ខាងដែលផ្កាយរណប 8 ត្រូវបានជួសជុលយ៉ាងតឹងរ៉ឹង ដោយភ្ជាប់ជាមួយនឹងកង់មកុដ 9 ដែលបានតំឡើងនៅក្នុងលំនៅឋាន 1 ហើយចុងម្ខាងទៀតត្រូវបានភ្ជាប់យ៉ាងសំខាន់ទៅនឹងដំបងតភ្ជាប់ 10 ដែលផ្តល់ចលនាច្រាសមកវិញទៅនឹងគ្រាប់រំកិល 11 ដែលកំពុងផ្លាស់ប្តូរ។ នៅក្នុងមគ្គុទ្ទេសក៍ 12 នៃស៊ុម 13. ក្នុងករណីនេះតម្លៃ eccentricity នៃ pin 7 គឺតិចជាងកាំនៃរង្វង់សំខាន់នៃផ្កាយរណប 8. ក្នុងអំឡុងពេលផ្អាកនៅក្នុងប្រតិបត្តិការរបស់ឧបករណ៍ ម្ជុល eccentric 7 ផ្លាស់ទី។ តាមបណ្តោយអ័ក្សដែលមានកាំប្រហែលស្មើនឹងចំងាយរវាងអ័ក្សនៃការតភ្ជាប់នៃដំបងតភ្ជាប់ 10 ជាមួយ crank 5 និងគ្រាប់រំកិល 11 ជាលទ្ធផលដែលវាបង្កើតចលនារញ្ជួយដោយមិនបែងចែកចលនាទៅគ្រាប់រំកិល (សូមមើលរូបភព។ 35 ខ). ជាមួយនឹង kinematics នៃឧបករណ៍បែបនេះគន្លងនៃចលនារបស់ eccentric pin 7 គឺជាខ្សែកោងបិទជិតជាមួយនឹង protrusions ប្រាំ ដែលការផ្អាកនៃគ្រាប់រំកិល 11 នៅក្នុងទីតាំងខ្លាំងត្រូវបានបង្ហាញដោយផ្នែក។ ក-ខ នៅលើតារាង។ ការផ្អាកនៃគ្រាប់រំកិល 11 កើតឡើងដោយសារតែការពិតដែលថាប្រវែងនៃដំបងតភ្ជាប់ 10 គឺស្មើនឹងកាំនៃធ្នូដែលនៅជិតក្នុងទម្រង់ទៅផ្នែកគន្លង ក-ខ crank ៥.
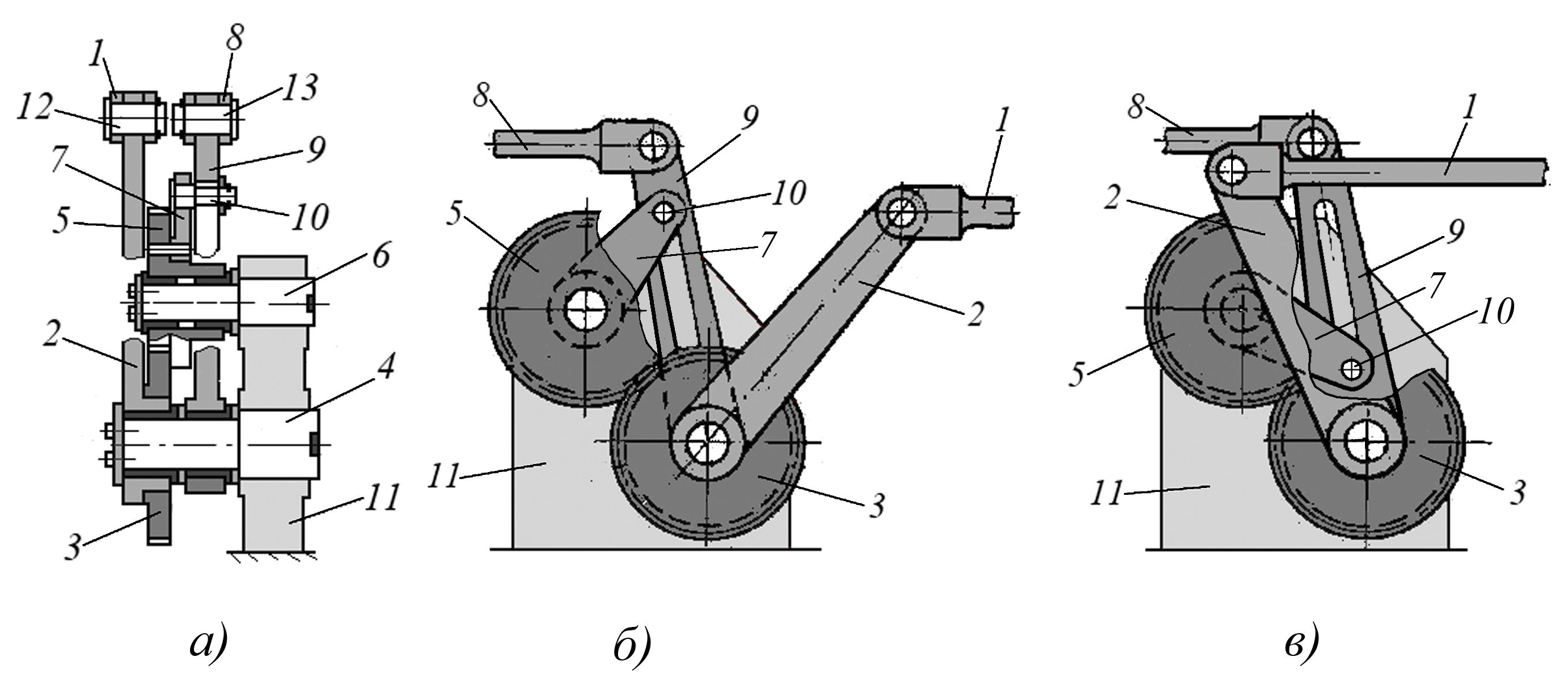
រូបភាពទី 36 ការរចនានៃយន្តការដងថ្លឹងប្រអប់លេខ ធ្វើឱ្យវាអាចទទួលបានពីរដងនៃចំនួនចលនាច្រាសមកវិញនៃតំណភ្ជាប់ដែលជំរុញទាក់ទងទៅនឹងការបើកបរមួយ។
រូបភាពទី 36 បង្ហាញពីការរចនានៃយន្តការ gear-lever ដែលធ្វើឱ្យវាអាចទទួលបានពីរដងនៃចំនួនចលនាច្រាសមកវិញនៃតំណភ្ជាប់ដែលបានជំរុញទាក់ទងនឹងការបើកបរមួយ។ ធាតុឈានមុខគេនៃដ្រាយនេះគឺដំបង 1 ដែលផ្តល់ចលនារញ្ជួយទៅដងថ្លឹង 2 ភ្ជាប់ទៅនឹងប្រអប់លេខ 3 និងបង្វិលដោយសេរីជាមួយនឹងកង់នេះនៅលើអ័ក្ស 4។ ប្រអប់លេខ 3 ផ្តល់ការបង្វិលទៅកង់ទី 5 ភ្ជាប់ទៅដងថ្លឹង 7 ដែលបានម៉ោននៅលើអ័ក្ស 6 ។ ម្ជុលលេខ 10 លេខ 7 ផ្លាស់ទីក្នុងចង្អូរនៃស្លាយ 9 បញ្ចេញចលនាទៅដំបង 8 ។ អ័ក្សលេខ 4 និង 6 ត្រូវបានម៉ោននៅក្នុងលំនៅស្ថាន 11 ដែលបានម៉ោននៅលើស៊ុម។ នៅក្នុងរូបភាព 36b,c, rod 1 ត្រូវបានបង្ហាញនៅក្នុងទីតាំងខាងស្តាំ និងខាងឆ្វេងបំផុត ដែលត្រូវនឹងការចាប់ផ្តើម និងពាក់កណ្តាលនៃវដ្ដចលនារបស់វា។ ស្លាយទី 9 ក្នុងករណីទាំងពីរកាន់កាប់ទីតាំងដូចគ្នា ចាប់តាំងពីវាបញ្ចប់វដ្តពេញលេញ ហើយត្រឡប់ទៅទីតាំងដើមវិញ។ Lever 2 ត្រូវបានផ្លាស់ទីដោយដំបង 1 ពីទីតាំងដែលបានបង្ហាញក្នុងរូបភាព 36a ទៅខាងឆ្វេង ជាលទ្ធផលដែលប្រអប់លេខ 3 បង្កើតផ្នែកជាក់លាក់នៃបដិវត្តន៍។ Gear 5 ដែលស្ថិតនៅក្នុងសំណាញ់ជាមួយកង់ទី 3 ធ្វើឱ្យការបង្វិលដូចគ្នាក្នុងទិសដៅផ្ទុយ។ ដៃចង្កូត 7 ភ្ជាប់ទៅកង់ 5 បង្វិលជាមួយវា ហើយម្រាមដៃ 10 រំកិលចុះក្រោមតាមចង្អូរនៃស្លាយ 9 ។ មុនពេលម្រាមដៃ 10 ឆ្លងកាត់កណ្តាលអ័ក្ស 6 ស្លាយបត់ទៅខាងស្តាំ ហើយឈានដល់ទីតាំងខ្លាំងបំផុតរបស់វា (សូមមើលរូបភាពទី 36 គ) . ជាមួយនឹងចលនាបន្ថែមទៀតនៃដំបង 1 ម្រាមដៃ 10 ធ្លាក់នៅខាងក្រោមកណ្តាលនៃអ័ក្ស 6 ហើយផ្លាស់ទីស្លាយ 9 ក្នុងទិសដៅផ្ទុយ ពោលគឺទៅខាងឆ្វេង។ នៅពេលដំបង 1 ទៅដល់ទីតាំងខាងឆ្វេងខ្លាំង ស្លាយទី 9 ក៏ចាប់យកទីតាំងខាងឆ្វេងខ្លាំងរបស់វាផងដែរ ដោយធ្វើចលនាពីរដង ខណៈដែលដំបង 1 ធ្វើចលនាទៅមុខប៉ុណ្ណោះ។ ក្នុងអំឡុងពេលដែលដំបង 1 ធ្វើឱ្យដាច់សរសៃឈាមខួរក្បាលបញ្ច្រាស តំណភ្ជាប់ 9 ធ្វើឱ្យមានការដាច់សរសៃឈាមខួរក្បាលពីរដងទៀត។
រូបភាពទី 37 ការរចនានៃយន្តការដងថ្លឹងដែលអនុញ្ញាតឱ្យអ្នកផ្លាស់ប្តូរមុំនៃការបង្វិលតាមកាលកំណត់នៃអ័ក្សដែលជំរុញដោយស្វ័យប្រវត្តិ។
រូបភាពទី 37 បង្ហាញពីការរចនានៃយន្តការ gear-lever ដែលអនុញ្ញាតឱ្យអ្នកផ្លាស់ប្តូរមុំនៃការបង្វិលតាមកាលកំណត់នៃអ័ក្សដែលបានជំរុញដោយស្វ័យប្រវត្តិ។ វាមានអ័ក្សជំរុញ 1 ដែលប្រអប់លេខ 2 និងកង់ 3 ត្រូវបានជួសជុលយ៉ាងតឹងរ៉ឹង ក៏ដូចជាដៃរ៉ុក 4 ដែលបានម៉ោននៅលើផ្លាប់ទី 1 ជាមួយនឹងលទ្ធភាពនៃការបង្វិល ខណៈដែលប្រអប់លេខ 2 ស្ថិតនៅក្នុងការជាប់ពាក់ព័ន្ធជាប្រចាំជាមួយឧបករណ៍។ 5 ដែលត្រូវបានម៉ោនដោយអ័ក្ស 12 នៅលើដៃរ៉ុក 4 និងផ្ទុក crank 6 ដោយភ្ជាប់តាមអ័ក្ស 13 ទៅដំបង 7 ដែលនៅក្នុងវេនត្រូវបានភ្ជាប់ជាស្នូលតាមរយៈអ័ក្ស 10 ទៅដំបងដ្រាយ 8 ។ លើសពីនេះទៀត pawl 11 ផ្ទុកដោយនិទាឃរដូវត្រូវបានដំឡើងនៅលើដៃ rocker 4 នៅក្នុងការទំនាក់ទំនងជាមួយ ratchet wheel 3 ហើយអ័ក្ស 10 ត្រូវបានដំឡើងនៅក្នុង slider 9 ដែលអាចផ្លាស់ទីតាមបណ្តោយ groove បណ្តោយនៃ rocker arm 4. នៅក្នុងរូបភាព 37a, គ្រាប់រំកិល 9 ត្រូវបានបង្ហាញនៅក្នុងទីតាំងទាបបំផុតរបស់វា។
យន្តការនេះដំណើរការដូចខាងក្រោម។ ដំបងទី 8 ធ្វើចលនាច្រាសមកវិញ ផ្តល់ចលនារំកិលទៅដៃរ៉ុក 4. នៅពេលដែលដំបងទី 8 ផ្លាស់ទីទៅមុខ ក្រញាំលេខ 11 ភ្ជាប់ជាមួយកង់ 3 ដោយសារតែអ័ក្សរុញ 1 រួមជាមួយនឹងកង់ 2 ធ្វើចលនារញ្ជួយរួមគ្នាជាមួយនឹងដៃរ៉ុក 4. នៅពេលដែលដំបងផ្លាស់ទីក្នុង 8 បញ្ច្រាស pawl 11 រំកិលតាមធ្មេញរបស់កង់ ratchet និង shaft 1 រួមជាមួយនឹង gear 2 នៅតែស្ថានី។ ក្នុងអំឡុងពេលចលនាបញ្ច្រាសនៃដៃរ៉ុក 4 ប្រអប់លេខ 5 រមៀលតាមបណ្តោយកង់ឧបករណ៍ស្ថានី 2 នៅពេលនេះបង្វិលនៅលើអ័ក្ស 12 និងបង្វិល crank 6 ដែលត្រូវបានភ្ជាប់ដោយហ៊ីងទៅនឹងដំបង 7 ផ្តល់នូវផ្ទះល្វែងមួយ។ ចលនាប៉ារ៉ាឡែលទៅវាហើយក្រោយមកទៀតនៅពេលជាមួយគ្នាផ្លាស់ទីគ្រាប់រំកិល 9 នៅក្នុងចង្អូរនៃដៃរ៉ុក 4 ជាលទ្ធផលដែលចម្ងាយពីអ័ក្ស 10 ទៅអ័ក្ស 1 កើនឡើង។ ដោយសារសមាមាត្រប្រអប់លេខរវាងប្រអប់លេខ 2 និងប្រអប់លេខ 5 ក្នុងករណីនេះត្រូវបានជ្រើសរើសស្មើនឹងពីរ ប្រអប់លេខ 5 ដែលមានចង្កឹះលេខ 6 បង្វិលតាមមុំ 180 ដឺក្រេ ហើយគ្រាប់រំកិលលេខ 9 កាន់កាប់ទីតាំងខាងលើបំផុតនៅក្នុងចង្អូរនៃរ៉កទី 4 (សូមមើលរូបភាពទី 37 ខ។ ) ដូច្នេះក្នុងអំឡុងពេលនៃការប៉ះទង្គិចទៅមុខបន្ទាប់នៃដំបង 8 មុំនៃការបង្វិលនៃដៃរ៉ុក 4 ហើយដូច្នេះអ័ក្សជំរុញ 1 នឹងតិចជាងដោយសារតែការកើនឡើងនៃកាំយោល។ នៅពេលដែលដំបង 8 ផ្លាស់ទីបញ្ច្រាស ហើយដៃរ៉ុក 4 វេន ប្រអប់លេខ 5 វិលតាមប្រអប់លេខថេរ 2 នឹងវិលម្តងទៀតនៅមុំ 180 ដឺក្រេ គ្រាប់រំកិល 9 នឹងយកទីតាំងទាបជាងដើមដូចបង្ហាញក្នុងរូបភាព 37a បន្ទាប់ពីនោះវដ្តនៃប្រតិបត្តិការនៃយន្តការនឹងកើតឡើងម្តងទៀត។
 រូបភាពទី 38 ការរចនានៃយន្តការដងថ្លឹងសម្រាប់ចលនាលីនេអ៊ែរ។
រូបភាពទី 38 ការរចនានៃយន្តការដងថ្លឹងសម្រាប់ចលនាលីនេអ៊ែរ។
ការគណនានៃយន្តការ (kinematic, ថាមពល, ថាមពល, កម្លាំង) ក៏ដូចជាធាតុរចនាសម្ព័ន្ធសំខាន់ៗរបស់ពួកគេ (eccentric និង crankshafts, rods, sliders, levers, hinge joints) ត្រូវបានផ្តល់ឱ្យនៅក្នុងការងារ។
ទោះបីជាមានការផ្លាស់ប្តូរផ្នែកវិស្វកម្មមេកានិកក្នុងរយៈពេល 20-25 ឆ្នាំកន្លងមកនេះ រួមទាំងការរចនាឧបករណ៍បច្ចេកវិជ្ជា ដែលទាក់ទងនឹងប្រភេទដ្រាយ និងប្រព័ន្ធគ្រប់គ្រងរបស់វា យន្តការដងថ្លឹងនៅតែបន្តប្រើប្រាស់យ៉ាងទូលំទូលាយដោយសារតែគុណសម្បត្តិពិសេសរបស់វា។ គុណសម្បត្តិទាំងនេះស្ថិតនៅក្នុងការពិតដែលថាយន្តការដងថ្លឹងអនុញ្ញាតឱ្យមានល្បឿនប្រតិបត្តិការខ្ពស់ ដើម្បីទទួលបានគន្លងនៃចលនានៃតំណភ្ជាប់ទិន្នផលរបស់ actuator ក៏ដូចជានៅក្នុងវត្តមាននៃបន្ទុកបច្ចេកវិជ្ជាជីពចរក្នុងអំឡុងពេលជាក់លាក់នៃវដ្តប្រតិបត្តិការឧបករណ៍។ ដោយប្រើជាពិសេសលក្ខណៈសម្បត្តិនៃយន្តការ crank ដើម្បីកាត់បន្ថយថាមពលដែលត្រូវការ។ លើសពីនេះទៀតយន្តការដងថ្លឹងធ្វើឱ្យវាអាចធ្វើទៅបានដោយប្រើធាតុរចនាសម្ព័ន្ធសាមញ្ញដើម្បីបង្កើនចំនួនដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលផ្លាស់ប្តូរទំហំនៃការដាច់សរសៃឈាមខួរក្បាលនៃតំណភ្ជាប់ទិន្នផលដោយមិនបង្កើនចលនានៃដ្រាយវ៍និងដោះស្រាយបញ្ហាមួយចំនួន។ បញ្ហាផ្សេងៗ។ ក្នុងពេលជាមួយគ្នានេះ ទាំងធារាសាស្ត្រ ឬដ្រាយមេកានិចដែលអាចបង្កើតកម្មវិធីបានមិនអាចប្រកួតប្រជែងជាមួយយន្តការ lever ក្នុងន័យនេះ ដែលកំណត់នូវកម្មវិធីដ៏ធំទូលាយមួយសម្រាប់យន្តការ lever ។
អក្សរសាស្ត្រ។
1. Ignatiev N.P. មូលដ្ឋានគ្រឹះនៃការរចនា Azov 2011 ។
2. Ignatiev N.P. ការរចនានៃយន្តការ Azov 2015 ។
អត្ថបទនេះត្រូវបានសរសេរដោយផ្អែកលើព័ត៌មានពីផ្នែកពាក់ព័ន្ធនៃការងាររបស់អ្នកនិពន្ធ "មូលដ្ឋានគ្រឹះនៃការរចនា"បោះពុម្ពក្នុងឆ្នាំ 2011 និងការងាររបស់អ្នកនិពន្ធ "ការរចនាយន្តការ"បោះពុម្ភផ្សាយក្នុងឆ្នាំ 2015 ។
នៅក្នុងសៀវភៅណែនាំ និងវិធីសាស្រ្ត "ការរចនាយន្តការ"បន្ថែមពីលើឧទាហរណ៍នៃការរចនានៃយន្តការ lever វាមាន:
- ឧទាហរណ៍នៃការរចនា និងអនុសាសន៍សម្រាប់ការប្រើប្រាស់យន្តការ cam យន្តការបណ្តោះអាសន្ន និងយន្តការរួមបញ្ចូលគ្នា។
- ឧទាហរណ៍នៃការរចនា និងការណែនាំសម្រាប់ការប្រើប្រាស់ប្រភេទសំខាន់ៗនៃផ្នែកនៃយន្តការខាងលើ៖ crankshafts, connecting rods, sliders, levers and rocker arms, cams and hinge joints,
- អនុសាសន៍សម្រាប់ការជ្រើសរើសប្រភេទនៃយន្តការជំរុញ និងឧទាហរណ៍នៃការអនុវត្តរបស់វា
- ការគណនានៃយន្តការ
- ឧទាហរណ៍នៃការសាងសង់ cyclogram នៃប្រតិបត្តិការម៉ាស៊ីន cam,
- វិធីសាស្រ្តរចនាយន្តការ
- អនុសាសន៍សម្រាប់កំណត់តម្រូវការភាពត្រឹមត្រូវចំពោះយន្តការ និងផ្នែកធម្មតារបស់ពួកគេ
- ឧទាហរណ៍នៃការរចនាយន្តការដើមដ៏ស្មុគស្មាញ
ដើម្បីទិញកំណែពេញលេញនៃអត្ថបទ សូមបញ្ចូលវាទៅក្នុងរទេះរបស់អ្នក
តម្លៃនៃកំណែពេញលេញនៃអត្ថបទគឺ 80 រូប្លិ៍។
យន្តការដងថ្លឹងជាមួយនឹងគូ kinematic ទាបបានរីករាលដាលនៅក្នុងវិស្វកម្មមេកានិចទំនើប។ គុណសម្បត្តិនៃយន្តការបែបនេះរួមមាន: ភាពផលិតខ្ពស់ លទ្ធភាពនៃការប្រើប្រាស់ឧបករណ៍រំកិលក្នុងការតភ្ជាប់ kinematic សមត្ថភាពក្នុងការបញ្ជូនកម្លាំងដ៏ធំជាមួយនឹងការពាក់តិចតួចនៃផ្ទៃទំនាក់ទំនង ភាពជឿជាក់ និងយូរអង្វែងក្នុងប្រតិបត្តិការ។ យន្តការទាំងនេះមិនតម្រូវឱ្យមានឧបករណ៍ដែលធានាឱ្យមានការបិទគូ kinematic មិនដូចយន្តការ cam នោះទេ។
យន្តការត្រូវបានបង្កើតឡើងពីលក្ខខណ្ឌដើម្បីបំពេញតម្រូវការនៃដំណើរការបច្ចេកវិជ្ជា។ ការរចនាយន្តការគឺជាកិច្ចការដ៏ស្មុគស្មាញមួយ ដំណោះស្រាយអាចបែងចែកជាពីរដំណាក់កាល។ ដំណាក់កាលដំបូងការសំយោគនៃយន្តការមាននៅក្នុងការជ្រើសរើសដ្យាក្រាម kinematic ដែលផ្តល់នូវប្រភេទដែលត្រូវការ និងច្បាប់នៃចលនានៃតំណភ្ជាប់លទ្ធផល និងលក្ខខណ្ឌទូទៅសម្រាប់ប្រតិបត្តិការនៃយន្តការ។ ក្នុង ដំណាក់កាលទីពីរទម្រង់រចនាសម្ព័ន្ធនៃតំណភ្ជាប់ និងគូ kinematic កំពុងត្រូវបានបង្កើតឡើង ដើម្បីធានាបាននូវភាពរឹងមាំ និងភាពជឿជាក់នៃយន្តការ។ វគ្គសិក្សារបស់យើងគ្របដណ្តប់តែប៉ុណ្ណោះ ដំណាក់កាលដំបូងការសំយោគ។
ការរចនាយន្តការជាធម្មតាត្រូវបានជ្រើសរើសដោយផ្អែកលើបទពិសោធន៍ទាក់ទងនឹងលក្ខខណ្ឌជាក់លាក់ដែលបានផ្តល់ឱ្យ។ បន្ទាប់មកកំណត់ ប៉ារ៉ាម៉ែត្រសំយោគ, i.e. ប្រវែងនៃតំណភ្ជាប់ និងកូអរដោនេនៃចំណុចដែលផ្តល់នូវគន្លងដែលត្រូវការ។ល។ ក៏ដូចជា លក្ខខណ្ឌសំយោគបន្ថែម។
លក្ខខណ្ឌសំយោគបន្ថែមរួមមាន លក្ខខណ្ឌសម្រាប់អត្ថិភាពនៃ crank មួយ។, និងផងដែរ។ លក្ខខណ្ឌផ្ទេរកម្លាំង.
លក្ខខណ្ឌផ្ទេរកម្លាំង
គុណភាពនៃការបញ្ជូនកម្លាំងនៅក្នុងម៉ាស៊ីនជាធម្មតាត្រូវបានកំណត់ដោយមុំសម្ពាធ λ ដែលកំណត់ដោយមិនគិតពីកម្លាំងទំនាញនៃតំណភ្ជាប់ និងកម្លាំងនិចលភាព។
មុំសម្ពាធ λ គឺ មុំស្រួចមួយរវាងវ៉ិចទ័រនៃកម្លាំងដែលដើរតួនៅលើតំណជំរុញពីផ្នែកម្ខាងនៃតំណផ្លាស់ទីដែលនៅជាប់គ្នា និងវ៉ិចទ័រនៃល្បឿនដាច់ខាតនៃចំណុចនៃការអនុវត្តនៃកម្លាំងនេះ។
មុំបញ្ជូនចលនា γ បំពេញមុំសម្ពាធរហូតដល់ 90 °:
γ = 90° – λ .
នៅដំណាក់កាលនៃការសំយោគម៉ែត្រ មុំដែលអាចអនុញ្ញាតបានអតិបរមានៃសម្ពាធ [λ max ] និងការបញ្ជូនចលនា [γ min] ត្រូវបានកំណត់ជាក្បួនដោយយកពួកវា៖
[λ អតិបរមា] ≤ 30° និង [γ min] ≥ 60° សម្រាប់តំណរុញរុញ និង
[λ អតិបរមា] ≤ 40°...45° និង [γ min] ≥ 50°...45° – សម្រាប់តំណដែលជំរុញដោយបង្វិល។
ចូរយើងពិចារណាពីលក្ខខណ្ឌសម្រាប់ការផ្ទេរកងកម្លាំងនៅក្នុងតំណភ្ជាប់ដែលមានរាងបួនជ្រុងដែលស្ថិតនៅក្នុងលំនឹងក្រោមឥទ្ធិពលនៃគ្រានៃកម្លាំងជំរុញ។ មឃ និងពេលនៃការតស៊ូ មគ (រូបភាព 3.1) ។ មុំសម្ពាធ λ កំណត់លក្ខណៈទំនាក់ទំនងរវាងកម្លាំងតស៊ូមានប្រយោជន៍ ច 23 cos λ យកឈ្នះពេលនៃការតស៊ូ មជាមួយនិងកម្លាំង ច២៣, ស្មើ
ច 23 = មជាមួយ /( លីត្រ ព្រះអាទិត្យ∙ cos λ)។
រូប ៣.១. មុំសម្ពាធ λ នៅក្នុងតំណភ្ជាប់ដែលមានបួនរបារ
នៅពេលដែលមុំសម្ពាធកើនឡើង កម្លាំងកាន់តែច្រើនត្រូវតែអនុវត្ត ច 23 ដើម្បីយកឈ្នះគ្រានៃការតស៊ូដូចគ្នា។ នេះនាំឱ្យមានការកើនឡើងនៃប្រតិកម្មនៅក្នុងគូ kinematic និងការថយចុះនៃប្រសិទ្ធភាពនៃយន្តការ។
នៅពេលដែលយន្តការផ្លាស់ទី មុំសម្ពាធផ្លាស់ប្តូរ។ មុំនេះនៅក្នុង hinge បួនរបារឈានដល់តម្លៃខ្លាំងនៅក្នុងទីតាំងដែលជាកន្លែងដែល crank នេះ។ អូអេដែលមានទីតាំងនៅលើបន្ទាត់ត្រង់ដូចគ្នាជាមួយនឹងកន្លែងឈរ ប្រព័ន្ធប្រតិបត្តិការ(រូបភាព 3.2) ។
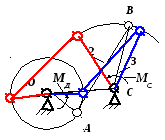
រូប ៣.២. ទីតាំងនៃយន្តការដែលមុំសម្ពាធឈានដល់
តម្លៃខ្លាំង
នៅក្នុងយន្តការ crank-slider មុំសម្ពាធត្រូវចំណាយពេលលើតម្លៃខ្លាំងនៅក្នុងមុខតំណែងដែលបង្ហាញក្នុងរូប។ 3.3 នៅពេល crank អូអេកាត់កែងទៅនឹងគន្លងនៃគ្រាប់រំកិល IN.

អង្ករ។ ៣.៣. ទីតាំងនៃយន្តការដែលមុំសម្ពាធ
មានតម្លៃខ្លាំង។
ខាងក្រោមនេះយើងពិចារណាបញ្ហាទូទៅបំផុតនៃការសំយោគ kinematic នៃយន្តការនៅក្នុងគម្រោងវគ្គសិក្សា។
ការសំយោគនៃតំណភ្ជាប់ដែលមានជ្រុងបួនដោយផ្អែកលើមេគុណនៃការផ្លាស់ប្តូរល្បឿនមធ្យម និងទីតាំងខ្លាំងពីរនៃដៃរ៉ក
មេគុណ kការផ្លាស់ប្តូរល្បឿនជាមធ្យមនៃតំណភ្ជាប់ដែលបានជំរុញគឺស្មើនឹង k = វ គ 2 – 1 / វ គ 1 – 2 ,
កន្លែងណា វ គ 1 – 2 − ល្បឿនលីនេអ៊ែរជាមធ្យមនៃចំណុចមួយ។ ជាមួយ(រូបភាព 3.4) ក្នុងអំឡុងពេលដាច់សរសៃឈាមខួរក្បាលធ្វើការ។ វ គ 2 – 1 − ដូចគ្នាសម្រាប់ជំងឺដាច់សរសៃឈាមខួរក្បាលបញ្ច្រាស។
ចូរយើងទទួលយក k> 1, ចាប់តាំងពីពេលដែលរចនាយន្តការ, ជាក្បួន, ពេលវេលាដើម្បីត្រឡប់ទៅទីតាំងដំបូងត្រូវបានយកតិចជាងពេលវេលាដាច់សរសៃឈាមខួរក្បាលធ្វើការ, ដូច្នេះ k > 1.
វាមិនពិបាកក្នុងការបញ្ជាក់នោះទេ។ k= (180 ° + θ) / (180 ° - θ) ។
តើ θ = 180° ( k −1) /(k +1),
កន្លែងណា q − មុំរវាងទីតាំងដំបងតភ្ជាប់ B.C.នៅដើមនិងចុងបញ្ចប់នៃការដាច់សរសៃឈាមខួរក្បាលការងារ។
ចូរយើងណែនាំសញ្ញាណខាងក្រោម៖
លីត្រ 1 - ប្រវែង crank AB,(សូមមើលរូប 3.4); លីត្រ 2- ប្រវែងដំបងតភ្ជាប់ ព្រះអាទិត្យ;
លីត្រ 3 - ប្រវែងរ៉ុក ស៊ីឌី; លីត្រ 4 - ចម្ងាយរវាងការគាំទ្រ (ប្រវែងឈរ កឃ).

អង្ករ។ ៣.៤. ដ្យាក្រាមនៃយន្តការនៅក្នុងមុខតំណែងដែលត្រូវគ្នានឹងតម្លៃនៃមុំដែលបានបញ្ជាក់ψ
ផ្តល់មុំ ψ 1 និង ψ 2 ក៏ដូចជាមេគុណ kអនុញ្ញាតឱ្យយើងពិពណ៌នាអំពីទីតាំងខ្លាំងទាំងពីរនៃដៃរ៉ុក ស៊ីឌី(រូបភាព 3.5) ។
ពិន្ទុ ជាមួយ 1 និង ជាមួយចូរភ្ជាប់ 2 ជាមួយបន្ទាត់ត្រង់។ ចូរយើងគណនាមុំ q រវាងទីតាំងខ្លាំងនៃដំបងតភ្ជាប់ ព្រះអាទិត្យ. នៅចំណុច ជាមួយ 2 សង់មុំ γ = 90° −
θ និងពីចំណុច ជាមួយ 1 បន្ថយកាត់កែងទៅបន្ទាត់ ជាមួយ 1 ជាមួយ 2 រហូតទាល់តែវាប្រសព្វជាមួយបន្ទាត់ដែលគូសចេញពីចំនុច ជាមួយ 2 និងបង្កើតមុំ γ ។ ចូរយើងសម្គាល់ចំណុចប្រសព្វនៃបន្ទាត់ទាំងនេះ អំពី. ជាក់ស្តែងនៅក្នុងត្រីកោណកែង អូជាមួយ 1 ជាមួយ 2 ជ្រុង ជាមួយ 1 ប្រព័ន្ធប្រតិបត្តិការ 2 = θ។ ដោយបីពិន្ទុ O, ជាមួយ 1 និង ជាមួយ 2 យើងពិពណ៌នាអំពីរង្វង់មួយ។ មុំចារឹកជាមួយចំនុចកំពូលនៅចំណុច អំពីសម្រាកនៅលើធ្នូ  និងស្មើនឹងមុំ θ ក៏ដូចជាមុំចារឹកទាំងអស់ដោយផ្អែកលើធ្នូដូចគ្នា។ អនុញ្ញាតឱ្យយើងជ្រើសរើសនៅលើរង្វង់ដែលមានកណ្តាលនៅចំណុច អំពីចំណុចបំពាន កហើយភ្ជាប់វាជាមួយផ្នែកត្រង់ជាមួយចំណុច ជាមួយ 1 និង ជាមួយ២. ជាលទ្ធផលដាក់ crank support នៅចំណុច កយើងទទួលបានដ្យាក្រាមនៃយន្តការរបារបួននៅក្នុងទីតាំងខ្លាំង (សូមមើលរូប 3.5)។
និងស្មើនឹងមុំ θ ក៏ដូចជាមុំចារឹកទាំងអស់ដោយផ្អែកលើធ្នូដូចគ្នា។ អនុញ្ញាតឱ្យយើងជ្រើសរើសនៅលើរង្វង់ដែលមានកណ្តាលនៅចំណុច អំពីចំណុចបំពាន កហើយភ្ជាប់វាជាមួយផ្នែកត្រង់ជាមួយចំណុច ជាមួយ 1 និង ជាមួយ២. ជាលទ្ធផលដាក់ crank support នៅចំណុច កយើងទទួលបានដ្យាក្រាមនៃយន្តការរបារបួននៅក្នុងទីតាំងខ្លាំង (សូមមើលរូប 3.5)។

អង្ករ។ ៣.៥. ការសំយោគនៃ hinge បួនរបារយោងទៅតាមមេគុណ k
ការផ្លាស់ប្តូរក្នុងល្បឿនមធ្យម និងទីតាំងខ្លាំងពីររបស់រ៉ក
តាមរូបភាពវាធ្វើតាម AC 1 = IN 1 ជាមួយ 1 -AB 1 = លីត្រ 2 − លីត្រ 1 ; AC 2 = IN 2 ជាមួយ 2 -AB 2 = លីត្រ 2 + លីត្រ 1 .
កន្លែងណា លីត្រ 1 = 0,5 (AC 2 −AC 1) μ លីត្រ / 2; លីត្រ 2 = AC 2 − លីត្រ 1 .
ប្រវែងឈរ កឃ = លីត្រ 4 នឹងត្រូវបានកំណត់ដោយទីតាំងនៃចំណុច ក.
ចាប់តាំងពីទីតាំងនៃចំណុច កត្រូវបានជ្រើសរើសតាមអំពើចិត្ត មានដំណោះស្រាយចម្រុះចំពោះបញ្ហា។ នេះអនុញ្ញាតឱ្យអ្នកណែនាំលក្ខខណ្ឌបន្ថែមឧទាហរណ៍លក្ខខណ្ឌនៃការផ្ទេរកម្លាំងវត្តមានឬអវត្តមាននៃ eccentricity នៃទីតាំងនៃការគាំទ្រដែលទាក់ទងទៅនឹងអ័ក្សកូអរដោនេ។
ការសំយោគយន្តការរ៉ុកយោងទៅតាម មេគុណk ការផ្លាស់ប្តូរ
ល្បឿនជាមធ្យមនៃឈុត
ផ្តល់អោយ៖ មេគុណ kការផ្លាស់ប្តូរល្បឿន និងទីតាំងខ្លាំងពីរនៃចំណុច INឆាកខាងក្រោយ ព្រះអាទិត្យ.
ចូរយើងពិចារណាយន្តការរ៉ុកនៅក្នុងទីតាំងខ្លាំងពីរ (រូបភាព 3.6) ។

អង្ករ។ ៣.៦. ការសំយោគយន្តការរ៉ុក
មុំរវាងទីតាំង crank អូអេ 2 និងការបន្តនៃ crank នៅក្នុងទីតាំង អូអេ 1 ស្មើនឹង θ = 180° ( k −1) /(k+1)។ មុំ IN 1 គ ខ 2 ហើយ q នឹងស្មើគ្នាទៅវិញទៅមក ដូចជាមុំដែលមានជ្រុងកាត់កែងគ្នាទៅវិញទៅមក។
នៅលើបន្ទាត់ត្រង់មួយ។ IN 1 IN 2 សង់ត្រីកោណ isosceles ដែលមានមុំនៅចំនុចកំពូល ជាមួយ, ស្មើនឹងមុំ q ។ នៅលើបន្ទាត់ត្រង់ដែលបែងចែកមុំ q ជាពាក់កណ្តាលនៅចំណុចបំពាន សូមជ្រើសរើសចំណុចមួយ។ អំពីនៅជុំវិញដែល crank បង្វិល អូអេ. ទម្លាក់ពីចំណុច អំពីកាត់កែងទៅបន្ទាត់ IN 1 ជាមួយ(ឬ IN 2 ជាមួយ), ស្វែងរកប្រវែងនៃ crank អូអេ. យន្តការរ៉ុកដែលជាលទ្ធផលនឹងបំពេញលក្ខខណ្ឌដែលបានបញ្ជាក់។ ការសាងសង់យន្តការរ៉ុកតាមលក្ខខណ្ឌដែលបានផ្តល់ឱ្យកើតឡើងដូចខាងក្រោម។ ពិន្ទុ IN 1 និង IN 2, ទីតាំងដែលត្រូវបានផ្តល់ឱ្យយើងភ្ជាប់ជាមួយបន្ទាត់ត្រង់។
សំយោគនៃយន្តការ crank-slider
អនុញ្ញាតឱ្យយើងទទួលយកអនុសញ្ញាខាងក្រោម (រូបភាព 3.7)៖
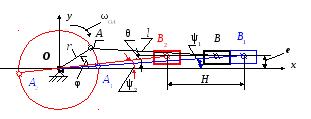
អង្ករ។ ៣.៧. គ្រោងការណ៍នៃយន្តការ crank-slider
r- ប្រវែង crank អូអេ;ន- ជំងឺដាច់សរសៃឈាមខួរក្បាលនៃគ្រាប់រំកិល; លីត្រ- ប្រវែងដំបងតភ្ជាប់ AB;
អ៊ី- disaxial, ឧ។ អុហ្វសិតគន្លងចំណុច INគ្រាប់រំកិលទាក់ទងទៅនឹងអ័ក្ស អូ ;
អិល = លីត្រ/ r- ប្រវែងដែលទាក់ទងនៃដំបងតភ្ជាប់;
ν = អ៊ី/r- disaxial ទាក់ទង;
h = ហ/ r- ជំងឺដាច់សរសៃឈាមខួរក្បាលដែលទាក់ទងនៃគ្រាប់រំកិល ;
λ អតិបរមា – មុំសម្ពាធអតិបរមា (សូមមើលរូប 3.3);
k − មេគុណនៃការផ្លាស់ប្តូរល្បឿនមធ្យមនៃគ្រាប់រំកិល (សូមមើល§ 3.1)
ψ 1 និង ψ 2 - មុំស្រួចដែលបង្កើតឡើងដោយ crank អូអេជាមួយនឹងទិសដៅ អូនៅក្នុងទីតាំងខ្លាំងនៃគ្រាប់រំកិល: φ 1 =  IN 1
អូ, φ 2 = IN 2
អូ
;
IN 1
អូ, φ 2 = IN 2
អូ
;
θ = ψ 2 – ψ 1 – មុំស្រួចរវាងកំណាត់តភ្ជាប់នៅក្នុងទីតាំងខ្លាំងនៃស្លាយ។
កិច្ចការទី 1 ។ បានផ្តល់ឱ្យ៖ ទេ អិល = លីត្រ/ r.
ស្វែងរក៖ r; លីត្រ; អតិបរមា
ប្រវែង crank អូអេ: r = ហ / h. AB: លីត្រ = អិល r.
ប្រវែងដំបងតភ្ជាប់ អិល] .
តម្លៃធំបំផុតនៃមុំសម្ពាធ អតិបរមា = arc sin [(1 + ν) / បានផ្តល់ឱ្យ៖ កិច្ចការទី 2 ។k, អិល= លីត្រ/ r.
ស្វែងរក៖ អិន r; លីត្រ; អ៊ី;
អតិបរមា
មុំស្រួចរវាងកំណាត់តភ្ជាប់នៅក្នុងទីតាំងខ្លាំងនៃគ្រាប់រំកិល k–1)/(k+1).
θ = 180 0 ∙(
h = {2∙} 0,5 .
យើងរកឃើញទំនាក់ទំនង disaxial ពីកន្សោម
ν = [( h –2)∙(អិល 2 –1)] 0,5 .
ប្រវែង crank r = ហ/ h; ប្រវែងដំបងតភ្ជាប់ លីត្រ = អិល r; disaxial អ៊ី =ν r.
តម្លៃធំបំផុតនៃមុំសម្ពាធ λ max = arc sin [(1 + ν) / អិល].