Matrix metode SLAU løsninger anvendes til at løse ligningssystemer, hvor antallet af ligninger svarer til antallet af ukendte. Metoden bruges bedst til at løse lavordenssystemer. Matrixmetoden til løsning af lineære ligningssystemer er baseret på anvendelsen af egenskaberne ved matrixmultiplikation.
Denne metode med andre ord invers matrix metode, såkaldt, fordi løsningen reduceres til en almindelig matrixligning, for at løse den skal du finde den inverse matrix.
Matrix løsningsmetode En SLAE med en determinant, der er større eller mindre end nul, er som følger:
Antag, at der er et SLE (system af lineære ligninger) med n ukendt (over et vilkårligt felt):
Dette betyder, at det nemt kan konverteres til matrixform:
AX=B, Hvor EN— systemets hovedmatrix B Og x— kolonner med gratis vilkår og løsninger af systemet, henholdsvis:

Lad os gange denne matrixligning fra venstre med A−1— omvendt matrix til matrix A: A −1 (AX)=A −1 B.
Fordi A −1 A=E, Midler, X=A −1 B. Den højre side af ligningen giver løsningssøjlen i det indledende system. Betingelsen for anvendeligheden af matrixmetoden er matrixens ikke-degeneration EN. En nødvendig og tilstrækkelig betingelse for dette er, at determinanten af matricen ikke er lig med nul EN:
detA≠0.
Til homogent system af lineære ligninger, dvs. hvis vektor B=0, gælder den modsatte regel: systemet AX=0 der er en ikke-triviel (dvs. ikke lig med nul) løsning kun når detA=0. Denne forbindelse mellem løsninger af homogene og inhomogene systemer af lineære ligninger kaldes Fredholm alternativ.
Opløsningen af SLAE'en ved hjælp af matrixmetoden udføres således i overensstemmelse med formlen ![]() . Eller løsningen til SLAE findes ved hjælp af omvendt matrix A−1.
. Eller løsningen til SLAE findes ved hjælp af omvendt matrix A−1.
Det er kendt, at for en kvadratisk matrix EN bestille n på n der er en omvendt matrix A−1 kun hvis dens determinant ikke er nul. Altså systemet n lineære algebraiske ligninger med n Vi løser kun ukendte ved hjælp af matrixmetoden, hvis determinanten for systemets hovedmatrix ikke er lig med nul.
På trods af, at der er begrænsninger for anvendeligheden af en sådan metode og vanskelighederne ved beregninger for store værdier af koefficienter og højordenssystemer, kan metoden let implementeres på en computer.
Et eksempel på løsning af en ikke-homogen SLAE.

Lad os først kontrollere, om determinanten af koefficientmatrixen for ukendte SLAE'er ikke er lig med nul.




Nu finder vi fagforeningsmatrix, transponer det og indsæt det i formlen for at bestemme den inverse matrix.
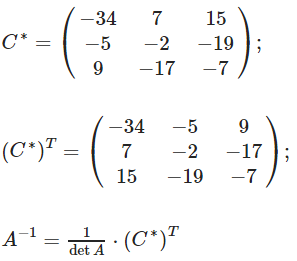
Erstat variablerne i formlen:
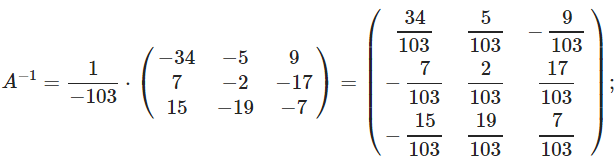
Nu finder vi de ukendte ved at gange den inverse matrix og kolonnen med frie led.

Så, x=2; y=1; z=4.
Når du går fra den sædvanlige form af SLAE til matrixformen, skal du være forsigtig med rækkefølgen af de ukendte variable i systemets ligninger. For eksempel:

Det kan IKKE skrives som:

Det er først nødvendigt at bestille de ukendte variable i hver ligning i systemet og først derefter fortsætte til matrixnotation:


Derudover skal du i stedet være forsigtig med betegnelsen af ukendte variable x 1, x 2, …, x n der kan være andre bogstaver. F.eks:

i matrixform skriver vi det sådan:

Matrixmetoden er bedre til at løse systemer af lineære ligninger, hvor antallet af ligninger falder sammen med antallet af ukendte variable, og determinanten for systemets hovedmatrix ikke er lig med nul. Når der er mere end 3 ligninger i et system, vil det kræve mere beregningsmæssig indsats at finde den inverse matrix, derfor er det i dette tilfælde tilrådeligt at bruge den Gaussiske metode til løsning.
Emne 2. SYSTEMER AF LINEÆRE ALGEBRAISKE LIGNINGER.
Basale koncepter.
Definition 1. System m lineære ligninger med n ukendte er et system af formen:
hvor og er tal.
Definition 2. En løsning til system (I) er et sæt af ukendte, hvor hver ligning af dette system bliver en identitet.
Definition 3. System (I) kaldes samling, hvis den har mindst én løsning og ikke-fælles, hvis det ikke har nogen løsninger. Ledsystemet kaldes bestemte, hvis det har en unik løsning, og usikker Ellers.
Definition 4. Formens ligning
hedder nul, og ligningen er af formen
hedder uforenelig. Det er klart, at et ligningssystem, der indeholder en inkompatibel ligning, er inkonsekvent.
Definition 5. To systemer af lineære ligninger kaldes tilsvarende, hvis hver løsning af et system tjener som en løsning til et andet, og omvendt er hver løsning af det andet system en løsning til det første.
Matrixrepræsentation af et system af lineære ligninger.
Lad os overveje system (I) (se §1).
Lad os betegne:
Koefficientmatrix for ukendte
Matrix - kolonne med frie termer
Matrix – kolonne af ukendte
 .
.
Definition 1. Matrixen kaldes systemets hovedmatrix(I), og matrixen er den udvidede matrix af system (I).
Ved definitionen af lighed af matricer svarer system (I) til matrix lighed:
 .
.
Højre side af denne lighed pr. definition af produktet af matricer ( se definition 3 § 5 kapitel 1) kan faktoriseres:
 , dvs.
, dvs.
Lighed (2) hedder matrixnotation af system (I).
Løsning af et system af lineære ligninger ved hjælp af Cramers metode.
Slip system (I) ind (se §1) m=n, dvs. antallet af ligninger er lig med antallet af ukendte, og systemets hovedmatrix er ikke-singular, dvs. . Så har system (I) fra §1 en unik løsning
hvor Δ = det A kaldet hoved determinant for systemet(I), A jeg fås fra determinanten Δ ved at erstatte jeg kolonne til en kolonne af frie medlemmer af systemet (I).
Eksempel: Løs systemet ved hjælp af Cramers metode:
 .
.
Ved formler (3)
![]() .
.
Vi beregner systemets determinanter:
 ,
,
 ,
,
 .
.
For at opnå determinanten erstattede vi den første kolonne i determinanten med en kolonne med frie termer; erstatter 2. kolonne i determinanten med en kolonne med frie termer, får vi ; på lignende måde, ved at erstatte den 3. kolonne i determinanten med en kolonne med frie termer, får vi . Systemløsning:
Løsning af systemer af lineære ligninger ved hjælp af en invers matrix.
Slip system (I) ind (se §1) m=n og systemets hovedmatrix er ikke-singular. Lad os skrive system (I) i matrixform ( se §2):
fordi matrix EN ikke-singular, så har den en invers matrix ( se sætning 1 §6 i kapitel 1). Lad os gange begge sider af ligheden (2) til matrixen altså
Per definition af en invers matrix. Fra ligestilling (3) vi har
Løs systemet ved hjælp af den inverse matrix
.
Lad os betegne
I eksempel (§ 3) beregnede vi determinanten, derfor matrixen EN har en omvendt matrix. Så i kraft (4) , dvs.
 . (5)
. (5)
Lad os finde matrixen ( se §6 kapitel 1)
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
,
 ,
,
 .
.
Gauss metode.
Lad et system af lineære ligninger være givet:
 . (JEG)
. (JEG)
Det er påkrævet at finde alle løsninger af system (I) eller sikre sig, at systemet er inkonsekvent.
Definition 1.Lad os kalde den elementære transformation af systemet(I) en af tre handlinger:
1) overstrege nulligningen;
2) tilføjelse til begge sider af ligningen de tilsvarende dele af en anden ligning, ganget med tallet l;
3) at bytte led i systemets ligninger, så ubekendte med samme tal i alle ligninger indtager samme pladser, dvs. hvis vi for eksempel i 1. ligning ændrede 2. og 3. led, så skal det samme gøres i alle systemets ligninger.
Gauss-metoden består i, at system (I) ved hjælp af elementære transformationer reduceres til et ækvivalent system, hvis løsning findes direkte eller dets uopløselighed etableres.
Som beskrevet i §2 er system (I) entydigt bestemt af dets udvidede matrix, og enhver elementær transformation af system (I) svarer til en elementær transformation af den udvidede matrix:
.
Transformation 1) svarer til at slette nulrækken i matricen, transformation 2) svarer til at tilføje endnu en række til den tilsvarende række i matricen, ganget med tallet l, transformation 3) svarer til at omarrangere søjlerne i matricen.
Det er let at se, at hver elementær transformation af matricen tværtimod svarer til en elementær transformation af systemet (I). På grund af ovenstående vil vi i stedet for operationer med system (I) arbejde med den udvidede matrix af dette system.
I matricen består 1. kolonne af koefficienter for x 1, 2. kolonne - fra koefficienterne for x 2 etc. Hvis kolonnerne omarrangeres, skal det tages i betragtning, at denne betingelse er overtrådt. For eksempel, hvis vi bytter 1. og 2. kolonne, så vil 1. kolonne nu indeholde koefficienterne for x 2, og i 2. kolonne - koefficienterne for x 1.
Vi vil løse system (I) ved hjælp af Gauss-metoden.
1. Kryds alle nul-rækker i matricen ud, hvis der er nogen (dvs. streg alle nul-ligninger ud i system (I).
2. Lad os tjekke, om der blandt rækkerne i matricen er en række, hvor alle elementer undtagen det sidste er lig med nul (lad os kalde en sådan række inkonsistent). Det er klart, at en sådan linje svarer til en inkonsistent ligning i system (I), derfor har system (I) ingen løsninger, og det er her processen slutter.
3. Lad matrixen ikke indeholde inkonsistente rækker (system (I) indeholder ikke inkonsistente ligninger). Hvis a 11 = 0, så finder vi i 1. række et eller andet element (bortset fra det sidste) andet end nul og omarrangerer kolonnerne, så der i 1. række ikke er et nul på 1. pladsen. Vi vil nu antage det (dvs. vi vil bytte de tilsvarende led i system (I) ligninger).
4. Gang 1. linje med og tilføj resultatet med 2. linje, gang derefter 1. linje med og læg resultatet sammen med 3. linje osv. Det er klart, at denne proces svarer til at eliminere det ukendte x 1 fra alle ligninger i system (I), undtagen 1. I den nye matrix får vi nuller i 1. kolonne under elementet en 11:
 .
.
5. Lad os krydse alle nul-rækker i matricen ud, hvis der er nogen, og tjekke, om der er en inkonsistent række (hvis der er en, så er systemet inkonsekvent, og løsningen slutter der). Lad os se om der bliver det a 22/=0, hvis ja, så finder vi i 2. række et andet element end nul og omarrangerer kolonnerne, så . Derefter ganges elementerne i 2. række med ![]() og tilføje med de tilsvarende elementer i 3. linje, derefter - elementerne i 2. linje og tilføje med de tilsvarende elementer i 4. linje osv., indtil vi får nuller under en 22/
og tilføje med de tilsvarende elementer i 3. linje, derefter - elementerne i 2. linje og tilføje med de tilsvarende elementer i 4. linje osv., indtil vi får nuller under en 22/
 .
.
De truffede handlinger svarer til at eliminere det ukendte x 2 fra alle ligninger i system (I), undtagen 1. og 2. Da antallet af rækker er endeligt, får vi derfor efter et begrænset antal trin, at enten er systemet inkonsekvent, eller også ender vi med en trinmatrix ( se definition 2 §7 kapitel 1) :
 ,
,
Lad os udskrive det ligningssystem, der svarer til matrixen. Dette system svarer til system (I)
 .
.
Fra den sidste ligning udtrykker vi; erstatte i den foregående ligning, finde osv., indtil vi får .
Note 1. Når vi løser system (I) ved hjælp af Gauss-metoden, kommer vi således frem til et af følgende tilfælde.
1. System (I) er inkonsekvent.
2. System (I) har en unik løsning, hvis antallet af rækker i matrixen er lig med antallet af ukendte ().
3. System (I) har et uendeligt antal løsninger, hvis antallet af rækker i matrixen er mindre end antallet af ukendte ().
Derfor gælder følgende sætning.
Sætning. Et system af lineære ligninger er enten inkonsekvent, har en unik løsning eller har et uendeligt antal løsninger.
Eksempler. Løs ligningssystemet ved hjælp af Gauss-metoden eller bevis dets inkonsistens:
b)  ;
;
a) Lad os omskrive det givne system i formen:
 .
.
Vi har byttet 1. og 2. ligning i det oprindelige system for at forenkle beregningerne (i stedet for brøker, vil vi kun operere med heltal ved hjælp af denne omarrangering).
Lad os oprette en udvidet matrix:
 .
.
Der er ingen nul-linjer; der er ingen inkompatible linjer, ; Lad os udelukke den 1. ukendte fra alle systemets ligninger undtagen den 1. For at gøre dette skal du gange elementerne i 1. række af matrixen med "-2" og tilføje dem med de tilsvarende elementer i 2. række, hvilket svarer til at gange den 1. ligning med "-2" og tilføje den med 2. ligning. Derefter multiplicerer vi elementerne i den 1. linje med "-3" og tilføjer dem med de tilsvarende elementer i den tredje linje, dvs. gange den 2. ligning i det givne system med "-3" og læg den til den 3. ligning. Vi får
 .
.
Matrixen svarer til et ligningssystem). - (se definition 3§7 i kapitel 1).
Denne online lommeregner løser et system af lineære ligninger ved hjælp af matrixmetoden. Der gives en meget detaljeret løsning. For at løse et system af lineære ligninger skal du vælge antallet af variable. Vælg en metode til at beregne den inverse matrix. Indtast derefter dataene i cellerne og klik på knappen "Beregn".
×
Advarsel
Vil du rydde alle celler?
Luk Ryd
Instruktioner til indtastning af data. Tal indtastes som heltal (eksempler: 487, 5, -7623 osv.), decimaler (eks. 67., 102.54 osv.) eller brøker. Brøken skal indtastes på formen a/b, hvor a og b er heltal eller decimaler. Eksempler 45/5, 6,6/76,4, -7/6,7 osv.
Matrixmetode til løsning af lineære ligningssystemer
Overvej følgende system af lineære ligninger:
Givet definitionen af en invers matrix, har vi EN −1 EN=E, Hvor E- identitetsmatrix. Derfor kan (4) skrives som følger:
For at løse systemet af lineære ligninger (1) (eller (2)), er det således nok at gange det inverse af EN matrix pr. begrænsningsvektor b.
Eksempler på løsning af et system af lineære ligninger ved hjælp af matrixmetoden
Eksempel 1. Løs følgende system af lineære ligninger ved hjælp af matrixmetoden:
Lad os finde det omvendte af matrix A ved hjælp af Jordan-Gauss-metoden. På højre side af matrixen EN Lad os skrive identitetsmatrixen:
Lad os udelukke elementerne i den 1. kolonne i matricen under hoveddiagonalen. For at gøre dette skal du tilføje linje 2,3 med linje 1, ganget med henholdsvis -1/3, -1/3:
Lad os udelukke elementerne i 2. kolonne i matrixen under hoveddiagonalen. For at gøre dette skal du tilføje linje 3 med linje 2 ganget med -24/51:
Lad os udelukke elementerne i 2. kolonne i matricen over hoveddiagonalen. For at gøre dette skal du tilføje linje 1 med linje 2 ganget med -3/17:
Adskil højre side af matrixen. Den resulterende matrix er den inverse matrix af EN :
Matrixform til at skrive et system af lineære ligninger: Ax=b, Hvor
Lad os beregne alle algebraiske komplementer af matricen EN:
 , ,
|
 , ,
|
Den inverse matrix beregnes ud fra følgende udtryk.
Ligninger generelt, lineære algebraiske ligninger og deres systemer, samt metoder til at løse dem, indtager en særlig plads i matematikken, både teoretisk og anvendt.
Dette skyldes, at langt de fleste fysiske, økonomiske, tekniske og endda pædagogiske problemer kan beskrives og løses ved hjælp af en række ligninger og deres systemer. For nylig har matematisk modellering vundet særlig popularitet blandt forskere, videnskabsmænd og praktikere inden for næsten alle fagområder, hvilket forklares med dets åbenlyse fordele i forhold til andre velkendte og gennemprøvede metoder til at studere objekter af forskellig karakter, især det såkaldte komplekse systemer. Der er en lang række forskellige definitioner af en matematisk model givet af videnskabsmænd på forskellige tidspunkter, men efter vores mening er den mest succesfulde følgende udsagn. En matematisk model er en idé udtrykt ved en ligning. Evnen til at sammensætte og løse ligninger og deres systemer er således en integreret egenskab for en moderne specialist.
For at løse systemer med lineære algebraiske ligninger er de mest almindeligt anvendte metoder Cramer, Jordan-Gauss og matrixmetoden.
Matrixopløsningsmetode er en metode til løsning af systemer af lineære algebraiske ligninger med en ikke-nul determinant ved hjælp af en invers matrix.
Hvis vi udskriver koefficienterne for de ukendte størrelser xi i matrix A, samler de ukendte størrelser i vektorkolonnen X og de frie led i vektorkolonnen B, så kan systemet af lineære algebraiske ligninger skrives i form af efter matrixligning A · X = B, som kun har en unik løsning, når determinanten af matrix A ikke er lig med nul. I dette tilfælde kan løsningen af ligningssystemet findes på følgende måde x = EN-1 · B, Hvor EN-1 er den inverse matrix.
Matrixopløsningsmetoden er som følger.
Lad os få et system af lineære ligninger med n ukendt:
Det kan omskrives i matrixform: ØKSE = B, Hvor EN- systemets hovedmatrix, B Og x- kolonner med gratis vilkår og løsninger af systemet, henholdsvis:

Lad os gange denne matrixligning fra venstre med EN-1 - matrix invers af matrix EN: EN -1 (ØKSE) = EN -1 B
Fordi EN -1 EN = E, vi får x= A -1 B. Den højre side af denne ligning vil give løsningskolonnen i det oprindelige system. Betingelsen for anvendeligheden af denne metode (såvel som den generelle eksistens af en løsning til et inhomogent system af lineære ligninger med antallet af ligninger lig med antallet af ukendte) er matrixens ikke-degeneration EN. En nødvendig og tilstrækkelig betingelse for dette er, at determinanten af matricen ikke er lig med nul EN:det EN≠ 0.
For et homogent system af lineære ligninger, det vil sige når vektoren B = 0 , faktisk den modsatte regel: systemet ØKSE = 0 har kun en ikke-triviel (det vil sige ikke-nul) løsning, hvis det EN= 0. En sådan sammenhæng mellem løsninger af homogene og inhomogene systemer af lineære ligninger kaldes Fredholm-alternativet.
Eksempel løsninger til et inhomogent system af lineære algebraiske ligninger.

Lad os sikre os, at determinanten af matricen, sammensat af koefficienterne for de ukendte i systemet af lineære algebraiske ligninger, ikke er lig med nul.

Det næste trin er at beregne de algebraiske komplementer for elementerne i matrixen bestående af koefficienterne for de ukendte. De vil være nødvendige for at finde den inverse matrix.

- determinanten af matricen A beregnes;
- gennem algebraiske additioner findes den inverse matrix A -1;
- der oprettes en løsningsskabelon i Excel;
Instruktioner. For at opnå en løsning ved hjælp af den omvendte matrix-metode skal du angive dimensionen af matrixen. I en ny dialogboks skal du derefter udfylde matrix A og vektoren for resultater B.
Se også Løsning af matrixligninger.Løsningsalgoritme
- Determinanten af matrix A beregnes. Hvis determinanten er nul, er løsningen slut. Systemet har et uendeligt antal løsninger.
- Når determinanten er forskellig fra nul, findes den inverse matrix A -1 gennem algebraiske additioner.
- Løsningsvektoren X =(x 1, x 2, ..., x n) fås ved at gange den inverse matrix med resultatvektoren B.
Algebraiske tilføjelser.
| A 1,1 = (-1) 1+1 |
| ∆ 1,1 = (1 (-2)-0 2) = -2 |
| A 1,2 = (-1) 1+2 |
| ∆ 1,2 = -(3 (-2)-1 2) = 8 |
| A 1,3 = (-1) 1+3 |
| ∆ 1,3 = (3 0-1 1) = -1 |
| A 2,1 = (-1) 2+1 |
| ∆ 2,1 = -(-2 (-2)-0 1) = -4 |
| A 2,2 = (-1) 2+2 |
| ∆ 2,2 = (2 (-2)-1 1) = -5 |
| A 2,3 = (-1) 2+3 |
| ∆ 2,3 = -(2 0-1 (-2)) = -2 |
| A 3,1 = (-1) 3+1 |
| ∆ 3,1 = (-2 2-1 1) = -5 |
| 3 |
| -2 |
| -1 |
X T = (1,0,1)
x 1 = -21 / -21 = 1
x 2 = 0 / -21 = 0
x 3 = -21 / -21 = 1
Undersøgelse:
2 1+3 0+1 1 = 3
-2 1+1 0+0 1 = -2
1 1+2 0+-2 1 = -1