ВВЕДЕНИЕ
Данное учебное пособие имеет целью оказать учащимся помощь в систематизации, обобщении и углублении знаний по физике, освоении методов и приемов решения задач при подготовке к итоговой аттестации.
Данное пособие включает:
· перечень рассматриваемых вопросов;
· систематизированное изложение основного теоретического материала (ориентирует учащихся на усвоение понятий, законов, закономерностей и т.д.);
· вопросы и задания для самоконтроля (они подобраны и сформулированы так, чтобы учащиеся могли проверить уровень своих знаний и умений по теме; вопросы и задания постепенно усложняются, что требует от учащихся для ответа и решения глубокого понимания физических законов, явлений и процессов, привлечения знаний из различных разделов физики);
· методические рекомендации по решению задач (последовательность действий, которые необходимо выполнить при решении задач, - от анализа условия задачи (его краткой записи, выполнение рисунка, схемы, чертежа, поясняющих условие задачи) до анализа и оценки полученного ответа);
· примеры решения задач (на примере решения наиболее типовых задач демонстрируется процесс построения и использования алгоритма решения задач на основе методических рекомендаций).
В приложении приведены тест и вариант контрольной работы, которую учащиеся выполняют самостоятельно.
Роль законов сохранения в механике и в других разделах физики огромна. Во-первых, они позволяют сравнительно простым путем, не рассматривая действующие на тела силы, решать ряд практически важных задач. Законы сохранения позволяют по первоначальному состоянию системы, не зная подробностей взаимодействия тел, определить ее конечное состояние, например, зная скорости тел до взаимодействия, определить скорости этих тел после взаимодействия. Во-вторых, и это главное, открытые в механике законы сохранения играют в природе огромную роль, далеко выходящую за рамки самой механики. Даже в тех условиях, когда законы механики Ньютона применять нельзя, законы сохранения импульса, энергии и момента импульса не теряют значения. Они применимы как к телам обычных размеров, так и к космическим телам и элементарным частицам. Именно всеобщность законов сохранения, их применимость ко всем явлениям природы, а не только к механическим делает эти законы столь значительными.
ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ
Импульс тела. Импульс силы. Закон сохранения импульса. Реактивное движение. К. Э. Циолковский - основоположник учения о реактивном движении.
Механическая работа. Работа силы тяжести, силы упругости, силы трения. Мощность.
Механическая энергия. Кинетическая и потенциальная энергия. Потенциальная энергия тел при гравитационном взаимодействии. Потенциальная энергия упруго деформированного тела. Закон сохранения энергии в механике. Изменение энергии в незамкнутых системах. Закон сохранения и превращения энергии. Упругие и неупругие соударения тел.
Импульс тела
Импульсом тела (количеством движения) называется векторная физическая величина, равная произведению массы тела т на его скорость и направленная так же, как и скорость (рис. 1.1):
Рисунок 1.1 Импульс тела.
Единицей импульса тела в СИ является килограмм-метр на секунду
Пусть скорость тела под действием силы F изменяется за время Δt от v 0 до v. Согласно основному уравнению динамики
Учитывая, что
Произведение силы на время ее действия называется импульсом силы . Единицей импульса силы является ньютон-секунда (Н с).
Формула (1.2) выражает второй закон Ньютона, который может быть сформулирован следующим образом: изменение импульса тела равно им пульсу равнодействующей сил, действующих на данное тело.
Отсюда видно, что импульс тела изменяется под действием данной силы одинаково у тел любой массы, если только время действия сил одинаково .
Импульс тела, как и скорость, зависит от выбора системы отсчета. Ускорение движения тела одинаково во всех инерциальных системах отсчета. Следовательно, сила, а значит, согласно (1.2) и изменение импульса тела не зависит от выбора системы отсчета. В любой инерциальной системе отсчета изменение импульса тела одинаково.
Закон сохранения импульса
Рассмотрим систему трех тел (рис. 2.1).
На тела действуют внешние силы F 1 , F 2 , F 3 . Силы F l2 , F 21 ,F 13 ,F 31 , F 23 , F 32 - внутренние силы.

Рисунок 2.1. Система трех тел.
Запишем для каждого тела основное уравнение динамики:
Просуммировав эти уравнения и учитывая, что согласно третьему закону Ньютона
где - импульс системы тел.
Импульс системы тел равен геометрической сумме импульсов тел системы. Таким образом, импульс системы тел могут изменить только внешние силы. Если система замкнута, то
Равенство (2.1) выражает закон сохранения импульса (ЗСИ): импульс замкнутой системы тел сохраняется при любых взаимодействиях этих тел.
В случае незамкнутой системы ЗСИ используется, если:
а) геометрическая сумма внешних сил равна нулю;
б) проекция равнодействующей внешних сил на некоторое направление равна нулю, т.е. вдоль этого направления импульссистемы сохраняется;
в) время взаимодействия мало (выстрел, взрыв, удар и т.п.).
С помощью ЗСИ можно вычислять скорости тел, не зная значения сил, действующих на них. ЗСИ является всеобщим законом: он применим как к телам обычных размеров, так и к космическим телам и элементарным частицам.
Реактивное движение
Под реактивным движением понимают движение тела, возникающее при отделении от тела его части с некоторой относительно тела скоростью.
При этом появляется так называемая реактивная сила, толкающая тело в сторону, противоположную направлению движения отделяющейся от него части тела.
Реактивное движение совершает ракета (рис. 3.1). Основной частью реактивного двигателя является камера сгорания. В одной из ее стенок имеется отверстие - реактивное сопло, предназначенное для выхода газа, образующегося при сгорании топлива. Высокая температура и давление газа определяют большую скорость истечения его из сопла.
До работы двигателя импульс ракеты и горючего был равен нулю, следовательно, и после включения двигателей геометрическая сумма импульсов ракеты и истекающих газов равна нулю:
![]()
где m и - масса и скорость выбрасываемых газов, М и - масса и скорость ракеты.

Рисунок 3.1. Реактивное движение.
В проекции на ось Оу:
Скорость ракеты.
Эта формула справедлива при условии небольшого изменения массы ракеты.
Конечная скорость ракеты находится в соответствии с формулой Циолковского:
![]() (3.1)
(3.1)
Где – отношение начальной и конечной масс ракеты.
Из нее следует, что конечная скорость ракеты может превышать относительную скорость истечения газов. Следовательно, ракета может быть разогнана до больших скоростей, необходимых для космических полетов. Но это может быть достигнуто только путем расхода значительной массы топлива, составляющей большую долю первоначальной массы ракеты. Например, для достижения первой космической скорости υ=7,9·10 3 м/с при =3·10 3 м/с (скорости истечения газов при сгорании топлива бывают порядка 2–4км/с) стартовая масса одноступенчатой ракеты должна примерно в 14раз превышать конечную массу. Для достижения конечной скорости υ 2 =4 отношение М 0 /М должно быть равно 50.
Значительное снижение стартовой массы ракеты может быть достигнуто при использовании многоступенчатых ракет , когда ступени ракеты отделяются по мере выгорания топлива. Из процесса последующего разгона ракеты исключаются массы контейнеров, в которых находилось топливо, отработавшие двигатели, системы управления ит.д. Именно по пути создания экономичных многоступенчатых ракет развивается современное ракетостроение.
Главная особенность реактивного движения состоит в том, что ракета может как ускоряться, так и тормозиться и поворачиваться без какого-либо взаимодействия с другими телами в отличие от всех других транспортных средств.
По принципу реактивного движения передвигаются осьминоги, кальмары, каракатицы, медузы.
Большая заслуга в развитии теории реактивного движения принадлежит К. Э. Циолковскому. Он разработал теорию полета тела переменной массы (ракеты) в однородном поле тяготения и рассчитал запасы топлива, необходимые для преодоления силы земного притяжения, основы теории жидкостного реактивного двигателя, а также элементы его конструкции, теорию многоступенчатых ракет, причем предложил два варианта: параллельный (несколько реактивных двигателей работает одновременно) и последовательный (реактивные двигатели работают друг за другом). К. Э. Циолковский строго научно доказал возможность полета в космос с помощью ракет с жидкостным реактивным двигателем, предложил специальные траектории посадки космических аппаратов на Землю, выдвинул идею создания межпланетных орбитальных станций, предложил идею автоматического управления ракетой.
Труды К. Э. Циолковского явились теоретической базой для развития современной ракетной техники.
Механическая работа
Действие силы, связанное с перемещением тела, характеризуется механической работой.
Механическая работа - это скалярная физическая величина, которая характеризует процесс перемещения тела под действием силы и равна произведению модуля силы на модуль перемещения и на косинус угла между ними:
В СИ единицей работы является джоуль (Дж).
Здесь F = const и а = const на всем перемещении (рис. 4.1).

Рисунок 4.1. Работа при перемещении тела.
Работа - величина скалярная и может быть как положительной, так и отрицательной (рисунок 4.2).

Рисунок 4.2. Зависимость работы от направления действия силы.
В общем случае сила переменна, путь криволинеен, угол α изменяется произвольно. Тогда для определения работы нужно мысленно разбитьвсе перемещение на такие малые перемещения , на которых можно считать силу и угол неизменными, и найти элементарные работы по формуле
Работа на всем перемещении будет равна алгебраической сумме элементарных работ и тем точнее, чем меньше каждое перемещение и чем больше их число:
и в пределе при Δг→0

Работа силы F на всей траектории выражается интегралом, вычисляемым вдоль траектории, где 1 и 2 - радиус-векторы начальной и конечной точек траектории.
Для вычисления этого интеграла надо знать зависимость F(r) вдоль траектории. Для определения работы можно воспользоваться графическим методом (рис. 4.3, а, б, в).

Рисунок 4.3. Графический метод для определения работы.
На графике F x = f(x) работа на перемещении Δr х = Δx численно равна площади заштрихованной фигуры. Работу можно представить как произведение средней силы на перемещение:
А =
В частности, если сила изменяется линейно от F 1 до F 2 на данном перемещении, то ее среднее значение
![]()
![]()
Если к движущемуся телу приложено несколько сил, то каждая из них совершает работу, а общая работа равна алгебраической сумме работ, совершаемых отдельными силами.
Работа силы тяжести
Пусть тело перемещается вертикально вниз из положения 1 в положение 2, определяемые соответственно высотами h 1 иh 2 над нулевым уровнем (рис. 5.1).

Рисунок 5.1. Работа силы тяжести.
Работа силы тяжести
При перемещении тела из положения 1 в положение 2 по траектории 1-3-2 работа силы тяжести
А = А 13 + А 32 .
A l 3 = mgΔr 1 cosα, A 32 = mgΔr 2 cos90° = 0.
Из рисунка 5.1 видно, что
Δr 1 cosα=h 1 -h 2 =>A=mg(h l ~h 2).
Это значит, что работа силы тяжести не зависит от формы траектории движения тела, а зависит только от перемещения центра тяжести тела по вертикали. На замкнутой траектории работа силы тяжести равна нулю.
Силы, работа которых не зависит от формы траектории, а на замкнутой траектории равна нулю, называются консервативными. Следовательно, сила тяжести - консервативная сила.
Работа силы упругости
Пусть тело, прикрепленное к пружине и находящееся на гладком стержне, перемещается из положения 1 в положение 2 (рис. 6.1).

Рисунок 6.1. Движение тела на пружине.
Сила упругости, действующая на тело со стороны деформированной пружины, не остается постоянной, а изменяется согласно закону Гука пропорционально абсолютному удлинению:
F 1 =kx 1 и F 2 = kx 2 .
Найдем работу силы упругости на этом перемещении по формуле
Более строгий вывод формулы для расчета работы силы упругости можно сделать, использовав метод интегрирования:
Можно показать, что работа силы упругости не зависит от формы траектории и на замкнутой траектории равна нулю. Она зависит только от взаимного положения частей тела. Сила упругости тоже консервативная сила.
Работа силы трения
Так как сила трения направлена противоположно перемещению (рис. 7.1), то работа силы трения будет
А тр = F TP Δг cos 180° = -F TP Δr.

Рисунок 7.1. Сила трения направлена противоположно движению тела.
Пусть тело перемещается из точки 1 в точку 2 по разным траекториям. Так как модули перемещений Δг 1 и (Δг 2 + Δг 3) неодинаковы (рис. 7.2), то сила трения совершает разные работы.

Рисунок 7.2. Перемещение тела по разным траекториям.
Таким образом, в отличие от силы тяжести и силы упругости работа силы трения зависит от формы траектории, по которой движется тело, и на замкнутой траектории не равна нулю. Работа силы трения необратимо превращает механическое движение тела в тепловое движение атомов и молекул.
Мощность
Различные машины и механизмы, выполняющие одинаковую работу, могут отличаться мощностью. Мощность характеризует быстроту совершения работы. Очевидно, что чем меньшее время требуется для выполнения данной работы, тем эффективнее работает машина, механизм и др.
При движении любого тела на него в общем случае действует несколько сил. Каждая сила совершает работу, и, следовательно, для каждой силы мы можем вычислить мощность.
Средняя мощность силы - скалярная физическая величина N, равная отношению работы А, совершаемой силой, к промежутку времени Δt, в течение которого она совершается:
В СИ единицей мощности является ватт (Вт).
Если тело движется прямолинейно и на него действует постоянная сила, то она совершает работу А = FΔrcosα. Поэтому мощность этой силы
где - проекция силы на направление движения.
По этой формуле можно рассчитывать и среднюю, и мгновенную мощности, подставляя значения средней или мгновенной скорости.
Мгновенная мощность - это мощность силы в данный момент времени.
![]()
Любой двигатель или механизм предназначены для выполнения определенной механической работы, которую называют полезной работой А п. Но любой машине приходится совершать большую работу, так как вследствие действия сил трения часть подводимой к машине энергии не может быть преобразована в механическую работу. Поэтому эффективность работы машины характеризуют коэффициентом полезного действия (КПД).
Коэффициент полезного действия η - это отношение полезной работы Ап, совершенной машиной, ко всей затраченной работе А 3 (подведенной энергии W):
![]()
где N n , N 3 - полезная и затраченная мощности соответственно.
КПД обычно выражают в процентах.
Механическая энергия
Механическое состояние тела (системы тел) определяется его положением относительно других тел (координатами) и его скоростью.
Если изменяется хотя бы одна из этих величин, то говорят об изменении механического состояния тела.
Состояние данной системы тел обязательно изменяется, если внешние силы совершают отличную от нуля работу.
Количественно механическое состояние системы и его изменение характеризуется механической энергией W.
Механическая энергия - это физическая величина, являющаяся функцией состояния системы и характеризующая способность системы совершать работу.
Изменение механической энергии ΔW равно работе приложенных к системе внешних сил:
Значение энергии системы в данном состоянии не зависит от пути перехода ее в это состояние.
Кинетическая энергия
Найдем, как энергия тел зависит от их скорости.
Пусть на тело массой m действуетсила F (это может быть одна сила или равнодействующая нескольких сил), направленная вдоль перемещения, и скорость тела изменяется от до (рис. 10.1).

Рисунок 10.1. Движение тела под действием силы.
Работа этой силы A = FΔr.
По второму закону Ньютона F = ma.
При равноускоренном движении
Следовательно,
![]()
Физическая величина
называется кинетической энергией.
Энергия, которой обладает тело вследствие своего движения, называется кинетической энергией .
A = W k 2 -W k 1 =A
теорема о кинетической энергии :
изменение кинетической энергии тела равно работе равнодействующей всех сил, действующих на тело.
Эта теорема справедлива независимо от того, какие силы действуют на тело: сила упругости, сила трения или сила тяжести.
![]()
Таким образом, кинетическая энергия тела равна работе, которую необходимо совершить, чтобы покоящемуся телу сообщить скорость.
Кинетическая энергия зависит от выбора системы отсчета.
©2015-2019 сайт
Все права принадлежать их авторам. Данный сайт не претендует на авторства, а предоставляет бесплатное использование.
Дата создания страницы: 2016-02-16
В результате взаимодействия тел их координаты и скорости могут непрерывно изменяться. Могут изменяться и силы, действующие между телами. К счастью, наряду с изменчивостью окружающего нас мира существует и неизменный фон, обусловленный так называемыми законами сохранения, утверждающими постоянство во времени некоторых физических величин, характеризующих систему взаимодействующих тел как целое.
Пусть
на тело массой m
в течение времени t
действует какая-то постоянная сила
.
Выясним, как произведение этой силы на
время её действия связано с изменением состояния этого
тела.
связано с изменением состояния этого
тела.
Закон сохранения импульса обязан своим существованием такому фундаментальному свойству симметрии, как однородность пространства .
Из второго закона Ньютона (2.8) мы видим, что временная характеристика действия силы связана с изменением импульса Fdt=dP
Импульсом тела P называют произведение массы тела на скорость его движения:
 (2.14)
(2.14)
Единица импульса - килограмм-метр в секунду (кг м/с).
Направлен импульс всегда в туже сторону, что и скорость.
В современной формулировки закон сохранения импульса гласит : при любых процессах, происходящих в замкнутой системе, её полный импульс остаётся неизменным.

Докажем справедливость этого закона. Рассмотрим движение двух материальных точек, взаимодействующих только между собой (рис. 2.4).
 Такую
систему можно назвать изолированной в
том смысле, что нет взаимодействия с
другими телами. По третьему закону
Ньютона, силы, действующие на эти тела,
равны по величине и противоположны по
направлению:
Такую
систему можно назвать изолированной в
том смысле, что нет взаимодействия с
другими телами. По третьему закону
Ньютона, силы, действующие на эти тела,
равны по величине и противоположны по
направлению:

Используя второй закон Ньютона, это можно выразить как:


Объединяя эти выражения, получим

Перепишем данное соотношение, используя понятие импульса:

Следовательно,


Если изменение какой-либо величины равно нулю, то эта физическая величина сохраняется. Таким образом, приходим к выводу: сумма импульсов двух взаимодействующих изолированных точек остается постоянной, независимо от вида взаимодействия между ними.
 (2.15)
(2.15)
Этот вывод можно обобщить на произвольную изолированную систему материальных точек, взаимодействующих между собой. Если система не замкнута, т.е. сумма внешних сил, действующих на систему, не равна нулю: F ≠ 0 , закон сохранения импульса не выполняется.
Центром масс (центром инерции) системы называют точку, координаты которой заданы уравнениями:

 (2.16)
(2.16)

где х 1 ; у 1 ; z 1 ; х 2 ; у 2 ; z 2 ; …; х N ; у N ; z N - координаты соответствующих материальных точек системы.
§2.5 Энергия. Механическая работа и мощность
Количественной мерой различных видов движения является энергия. При превращении одной формы движения в другую происходит изменение энергии. Точно также при передаче движения от одного тела к другому происходит уменьшение энергии одного тела и увеличение энергии другого тела. Такие переходы и превращения движения и, следовательно, энергии могут происходить либо в процессе работы, т.е. тогда, когда осуществляется перемещение тела при воздействии силы, либо в процессе теплообмена.
Для определения работы силы F рассмотрим криволинейную траекторию (рис. 2.5), по которой движется материальная точка из положения 1 в положение 2. Разобьем траекторию на элементарные, достаточно малые перемещения dr; этот вектор совпадает с направлением движения материаль ной точки. Модуль элементарного перемещения обозначим dS: |dr| = dS. Так как элементарное перемещение достаточно мало, то в этом случае силу F можно рассматривать неизменной и элементарную работу вычислять по формуле работы постоянной силы:
dA = F соsα dS = F соsα|dr|, (2.17)
или как скалярное произведение векторов:
 (2.18)
(2.18)
Э лементарная
работа
или
просто работа силы,
есть
скалярное произведение векторов силы
и элементарного перемещения.
лементарная
работа
или
просто работа силы,
есть
скалярное произведение векторов силы
и элементарного перемещения.
Суммируя все элементарные работы, можно определить работу переменной силы на участке траектории от точки 1 до точки 2 (см. рис. 2.5). Эта задача сводится к нахождению следующего интеграла:
 (2.19)
(2.19)
Пусть эта зависимость представлена графически (рис.2.6), тогда искомая работа определяется на графике площадью заштрихованной фигуры.
Заметим, что в отличие от второго закона Ньютона в выражениях (2.22) и (2.23) под F совсем не обязательно понимать равнодействующую всех сил, это может быть одна сила или равнодействующая нескольких сил.
Работа может быть положительной или отрицательной. Знак элементарной работы зависит от значения соsα. Так, например, из рисунка 2.7 видно, что при перемещении по горизонтальной поверхности тела, на которое действуют силы F, F тр и mg, работа силы F положительна (α > 0), работа силы трения F тр отрицательна (α = 180°), а работа силы тяжести mg равна нулю (α = 90°). Так как тангенциальная составляющая силы F t = F соs α, то элементарная работа вычисляется как произведение F t на модуль элементарного перемещения dS:
dA = F t dS (2.20)
Таким образом, работу совершает лишь тангенциальная составляющая силы, нормальная составляющая силы (α = 90°) работы не совершает.
Быстроту совершения работы характеризуют величиной, называемой мощностью.
Мощностью называется скалярная физическая величина, равная отношению работы ко времени, за которое она совер шается:
 (2.21)
(2.21)
Учитывая (2.22), получаем
 (2.22)
(2.22)
или N = Fυcosα (2.23) Мощность равна скалярному произведению векторов силы и скорости.
Из
полученной формулы видно, что при
постоянной мощности двигателя сила
тяги больше тогда, когда скорость
движения меньше
 .
Именно поэтому водитель автомобиля при
подъёме в гору, когда нужна наибольшая
сила тяги, переключает двигатель на
малую скорость.
.
Именно поэтому водитель автомобиля при
подъёме в гору, когда нужна наибольшая
сила тяги, переключает двигатель на
малую скорость.
Импульс тела
Импульсом тела называется величина, равная произведению массы тела на его скорость.
Следует помнить, что речь идет о теле, которое можно представить как материальную точку. Импульс тела ($р$) называют также количеством движения. Понятие количества движения было введено в физику Рене Декартом (1596—1650). Термин «импульс» появился позже (impulsus в переводе с латинского означает «толчок»). Импульс является векторной величиной (как и скорость) и выражается формулой:
$p↖{→}=mυ↖{→}$
Направление вектора импульса всегда совпадает с направлением скорости.
За единицу импульса в СИ принимают импульс тела массой $1$ кг, движущегося со скоростью $1$ м/с, следовательно, единицей импульса является $1$ кг $·$ м/с.
Если на тело (материальную точку) действует постоянная сила в течение промежутка времени $∆t$, то постоянным будет и ускорение:
$a↖{→}={{υ_2}↖{→}-{υ_1}↖{→}}/{∆t}$
где, ${υ_1}↖{→}$ и ${υ_2}↖{→}$ — начальная и конечная скорости тела. Подставив это значение в выражение второго закона Ньютона, получим:
${m({υ_2}↖{→}-{υ_1}↖{→})}/{∆t}=F↖{→}$
Раскрыв скобки и воспользовавшись выражением для импульса тела, имеем:
${p_2}↖{→}-{p_1}↖{→}=F↖{→}∆t$
Здесь ${p_2}↖{→}-{p_1}↖{→}=∆p↖{→}$ — изменение импульса за время $∆t$. Тогда предыдущее уравнение примет вид:
$∆p↖{→}=F↖{→}∆t$
Выражение $∆p↖{→}=F↖{→}∆t$ представляет собой математическую запись второго закона Ньютона.
Произведение силы на время ее действия называют импульсом силы . Поэтому изменение импульса точки равно изменению импульса силы, действующей на нее.
Выражение $∆p↖{→}=F↖{→}∆t$ называется уравнением движения тела . Следует заметить, что одно и то же действие — изменение импульса точки — может быть получено малой силой за большой промежуток времени и большой силой за малый промежуток времени.
Импульс системы тел. Закон изменения импульса
Импульсом (количеством движения) механической системы называется вектор, равный сумме импульсов всех материальных точек этой системы:
${p_{сист}}↖{→}={p_1}↖{→}+{p_2}↖{→}+...$
Законы изменения и сохранения импульса являются следствием второго и третьего законов Ньютона.
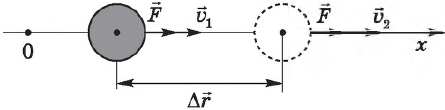
Рассмотрим систему, состоящую из двух тел. Силы ($F_{12}$ и $F_{21}$ на рисунке, с которыми тела системы взаимодействуют между собой, называются внутренними.
Пусть кроме внутренних сил на систему действуют внешние силы ${F_1}↖{→}$ и ${F_2}↖{→}$. Для каждого тела можно записать уравнение $∆p↖{→}=F↖{→}∆t$. Сложив левые и правые части этих уравнений, получим:
${∆p_1}↖{→}+{∆p_2}↖{→}=({F_{12}}↖{→}+{F_{21}}↖{→}+{F_1}↖{→}+{F_2}↖{→})∆t$
Согласно третьему закону Ньютона ${F_{12}}↖{→}=-{F_{21}}↖{→}$.
Следовательно,
${∆p_1}↖{→}+{∆p_2}↖{→}=({F_1}↖{→}+{F_2}↖{→})∆t$
В левой части стоит геометрическая сумма изменений импульсов всех тел системы, равная изменению импульса самой системы — ${∆p_{сист}}↖{→}$.С учетом этого равенство ${∆p_1}↖{→}+{∆p_2}↖{→}=({F_1}↖{→}+{F_2}↖{→})∆t$ можно записать:
${∆p_{сист}}↖{→}=F↖{→}∆t$
где $F↖{→}$ — сумма всех внешних сил, действующих на тело. Полученный результат означает, что импульс системы могут изменить только внешние силы, причем изменение импульса системы направлено так же, как суммарная внешняя сила. В этом суть закона изменения импульса механической системы.
Внутренние силы изменить суммарный импульс системы не могут. Они лишь меняют импульсы отдельных тел системы.
Закон сохранения импульса
Из уравнения ${∆p_{сист}}↖{→}=F↖{→}∆t$ вытекает закон сохранения импульса. Если на систему не действуют никакие внешние силы, то правая часть уравнения ${∆p_{сист}}↖{→}=F↖{→}∆t$ обращается в ноль, что означает неизменность суммарного импульса системы:
${∆p_{сист}}↖{→}=m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=const$
Система, на которую не действуют никакие внешние силы или равнодействующая внешних сил равна нулю, называется замкнутой.
Закон сохранения импульса гласит:
Суммарный импульс замкнутой системы тел остается постоянным при любых взаимодействиях тел системы между собой.
Полученный результат справедлив для системы, содержащей произвольное число тел. Если сумма внешних сил не равна нулю, но сумма их проекций на какое-то направление равна нулю, то проекция импульса системы на это направление не меняется. Так, например, система тел на поверхности Земли не может считаться замкнутой из-за силы тяжести, действующей на все тела, однако сумма проекций импульсов на горизонтальное направление может оставаться неизменной (при отсутствии трения), т. к. в этом направлении сила тяжести не действует.
Реактивное движение
Рассмотрим примеры, подтверждающие справедливость закона сохранения импульса.
Возьмем детский резиновый шарик, надуем его и отпустим. Мы увидим, что когда воздух начнет выходить из него в одну сторону, сам шарик полетит в другую. Движение шарика является примером реактивного движения. Объясняется оно законом сохранения импульса: суммарный импульс системы «шарик плюс воздух в нем» до истечения воздуха равен нулю; он должен остаться равным нулю и во время движения; поэтому шарик движется в сторону, противоположную направлению истечения струи, и с такой скоростью, что его импульс по модулю равен импульсу воздушной струи.
Реактивным движением называют движение тела, возникающее при отделении от него с какой- либо скоростью некоторой его части. Вследствие закона сохранения импульса направление движения тела при этом противоположно направлению движения отделившейся части.
На принципе реактивного движения основаны полеты ракет. Современная космическая ракета представляет собой очень сложный летательный аппарат. Масса ракеты складывается из массы рабочего тела (т. е. раскаленных газов, образующихся в результате сгорания топлива и выбрасываемых в виде реактивной струи) и конечной, или, как говорят, «сухой» массы ракеты, остающейся после выброса из ракеты рабочего тела.
Когда реактивная газовая струя с большой скоростью выбрасывается из ракеты, сама ракета устремляется в противоположную сторону. Согласно закону сохранения импульса, импульс $m_{p}υ_p$, приобретаемый ракетой, должен быть равен импульсу $m_{газ}·υ_{газ}$ выброшенных газов:
$m_{p}υ_p=m_{газ}·υ_{газ}$
Отсюда следует, что скорость ракеты
$υ_p=({m_{газ}}/{m_p})·υ_{газ}$
Из этой формулы видно, что скорость ракеты тем больше, чем больше скорость выбрасываемых газов и отношение массы рабочего тела (т. е. массы топлива) к конечной («сухой») массе ракеты.
Формула $υ_p=({m_{газ}}/{m_p})·υ_{газ}$ является приближенной. В ней не учитывается, что по мере сгорания топлива масса летящей ракеты становится все меньше и меньше. Точная формула для скорости ракеты была получена в 1897 г. К. Э. Циолковским и носит его имя.
Работа силы
Термин «работа» был введен в физику в 1826 г. французским ученым Ж. Понселе. Если в обыденной жизни работой называют лишь труд человека, то в физике и, в частности, в механике принято считать, что работу совершает сила. Физическую величину работы обычно обозначают буквой $А$.
Работа силы — это мера действия силы, зависящая от ее модуля и направления, а также от перемещения точки приложения силы. Для постоянной силы и прямолинейного перемещения работа определяется равенством:
$A=F|∆r↖{→}|cosα$
где $F$ — сила, действующая на тело, $∆r↖{→}$ — перемещение, $α$ — угол между силой и перемещением.

Работа силы равна произведению модулей силы и перемещения и косинуса угла между ними, т. е. скалярному произведению векторов $F↖{→}$ и $∆r↖{→}$.
Работа — величина скалярная. Если $α 0$, а если $90°
При действии на тело нескольких сил полная работа (сумма работ всех сил) равна работе результирующей силы.
Единицей работы в СИ является джоуль ($1$ Дж). $1$ Дж — это работа, которую совершает сила в $1$ Н на пути в $1$ м в направлении действия этой силы. Эта единица названа в честь английского ученого Дж. Джоуля (1818-1889): $1$ Дж = $1$ Н $·$ м. Часто применяются также килоджоули и миллиджоули: $1$ кДж $= 1 000$ Дж, $1$ мДж $= 0.001$ Дж.
Работа силы тяжести
Рассмотрим тело, скользящее по наклонной плоскости с углом наклона $α$ и высотой $Н$.

Выразим $∆x$ через $H$ и $α$:
$∆x={H}/{sinα}$
Учитывая, что сила тяжести $F_т=mg$ составляет угол ($90° - α$) с направлением перемещения, используя формулу $∆x={H}/{sin}α$, получим выражение для работы силы тяжести $A_g$:
$A_g=mg·cos(90°-α)·{H}/{sinα}=mgH$
Из этой формулы видно, что работа силы тяжести зависит от высоты и не зависит от угла наклона плоскости.
Отсюда следует, что:
- работа силы тяжести не зависит от формы траектории, по которой движется тело, а лишь от начального и конечного положения тела;
- при перемещении тела по замкнутой траектории работа силы тяжести равна нулю, т. е. сила тяжести — консервативная сила (консервативными называются силы, обладающие таким свойством).
Работа сил реакции , равна нулю, поскольку сила реакции ($N$) направлена перпендикулярно перемещению $∆x$.
Работа силы трения
Сила трения направлена противоположно перемещению $∆x$ и составляет с ним угол $180°$, поэтому работа силы трения отрицательна:
$A_{тр}=F_{тр}∆x·cos180°=-F_{тр}·∆x$
Так как $F_{тр}=μN, N=mg·cosα, ∆x=l={H}/{sinα},$ то
$A_{тр}=μmgHctgα$
Работа силы упругости
Пусть на нерастянутую пружину длиной $l_0$ действует внешняя сила $F↖{→}$, растягивая ее на $∆l_0=x_0$. В положении $x=x_0F_{упр}=kx_0$. После прекращения действия силы $F↖{→}$ в точке $х_0$ пружина под действием силы $F_{упр}$ сжимается.

Определим работу силы упругости при изменении координаты правого конца пружины от $х_0$ до $х$. Поскольку сила упругости на этом участке изменяется линейно, в законе Гука можно использовать ее среднее значение на этом участке:
$F_{упр.ср.}={kx_0+kx}/{2}={k}/{2}(x_0+x)$
Тогда работа (с учетом того, что направления ${F_{упр.ср.}}↖{→}$ и ${∆x}↖{→}$ совпадают) равна:
$A_{упр}={k}/{2}(x_0+x)(x_0-x)={kx_0^2}/{2}-{kx^2}/{2}$
Можно показать, что вид последней формулы не зависит от угла между ${F_{упр.ср.}}↖{→}$ и ${∆x}↖{→}$. Работа сил упругости зависит лишь от деформаций пружины в начальном и конечном состояниях.
Таким образом, сила упругости, подобно силе тяжести, является консервативной силой.
Мощность силы
Мощность — физическая величина, измеряемая отношением работы к промежутку времени, в течение которого она произведена.
Другими словами, мощность показывает, какая работа совершается за единицу времени (в СИ — за $1$ с).
Мощность определяется формулой:
где $N$ — мощность, $А$ — работа, совершенная за время $∆t$.
Подставив в формулу $N={A}/{∆t}$ вместо работы $A$ ее выражение $A=F|{∆r}↖{→}|cosα$, получим:
$N={F|{∆r}↖{→}|cosα}/{∆t}=Fυcosα$
Мощность равна произведению модулей векторов силы и скорости на косинус угла между этими векторами.
Мощность в системе СИ измеряется в ваттах (Вт). Один ватт ($1$ Вт) — это такая мощность, при которой за $1$ с совершается работа $1$ Дж: $1$ Вт $= 1$ Дж/с.
Эта единица названа в часть английского изобретателя Дж. Ватта (Уатта), построившего первую паровую машину. Сам Дж. Ватт (1736-1819) пользовался другой единицей мощности — лошадиной силой (л. с.), которую он ввел для того, чтобы можно было сравнивать работоспособности паровой машины и лошади: $1$ л.с. $= 735.5$ Вт.
В технике часто применяются более крупные единицы мощности — киловатт и мегаватт: $1$ кВт $= 1000$ Вт, $1$ МВт $= 1000000$ Вт.
Кинетическая энергия. Закон изменения кинетической энергии
Если тело или несколько взаимодействующих между собой тел (система тел) могут совершать работу, то говорят, что они обладают энергией.
Слово «энергия» (от греч. energia — действие, деятельность) нередко употребляется в быту. Так, например, людей, которые могут быстро выполнять работу, называют энергичными, обладающими большой энергией.
Энергия, которой обладает тело вследствие движения, называется кинетической энергией.
Как и в случае определения энергии вообще, о кинетической энергии можно сказать, что кинетическая энергия — это способность движущегося тела совершать работу.
Найдем кинетическую энергию тела массой $m$, движущегося со скоростью $υ$. Поскольку кинетическая энергия — это энергия, обусловленная движением, нулевым состоянием для нее является то состояние, в котором тело покоится. Найдя работу, необходимую для сообщения телу данной скорости, мы найдем его кинетическую энергию.
Для этого подсчитаем работу на участке перемещения $∆r↖{→}$ при совпадении направлений векторов силы $F↖{→}$ и перемещения $∆r↖{→}$. В этом случае работа равна
где $∆x=∆r$
Для движения точки с ускорением $α=const$ выражение для перемещения имеет вид:
$∆x=υ_1t+{at^2}/{2},$
где $υ_1$ — начальная скорость.
Подставив в уравнение $A=F·∆x$ выражение для $∆x$ из $∆x=υ_1t+{at^2}/{2}$ и воспользовавшись вторым законом Ньютона $F=ma$, получим:
$A=ma(υ_1t+{at^2}/{2})={mat}/{2}(2υ_1+at)$
Выразив ускорение через начальную $υ_1$ и конечную $υ_2$ скорости $a={υ_2-υ_1}/{t}$ и подставив в $A=ma(υ_1t+{at^2}/{2})={mat}/{2}(2υ_1+at)$ имеем:
$A={m(υ_2-υ_1)}/{2}·(2υ_1+υ_2-υ_1)$
$A={mυ_2^2}/{2}-{mυ_1^2}/{2}$
Приравняв теперь начальную скорость к нулю: $υ_1=0$, получим выражение для кинетической энергии:
$E_K={mυ}/{2}={p^2}/{2m}$
Таким образом, движущееся тело обладает кинетической энергией. Эта энергия равна работе, которую необходимо совершить, чтобы увеличить скорость тела от нуля до значения $υ$.
Из $E_K={mυ}/{2}={p^2}/{2m}$ следует, что работа силы по перемещению тела из одного положения в другое равна изменению кинетической энергии:
$A=E_{K_2}-E_{K_1}=∆E_K$
Равенство $A=E_{K_2}-E_{K_1}=∆E_K$ выражает теорему об изменении кинетической энергии.
Изменение кинетической энергии тела (материальной точки) за некоторый промежуток времени равно работе, совершенной за это время силой, действующей на тело.
Потенциальная энергия
Потенциальной энергией называется энергия, определяемая взаимным расположением взаимодействующих тел или частей одного и того же тела.
Поскольку энергия определяется как способность тела совершать работу, то потенциальную энергию, естественно, определяют как работу силы, зависящую только от взаимного расположения тел. Таковой является работа силы тяжести $A=mgh_1-mgh_2=mgH$ и работа силы упругости:
$A={kx_0^2}/{2}-{kx^2}/{2}$
Потенциальной энергией тела, взаимодействующего с Землей, называют величину, равную произведению массы $m$ этого тела на ускорение свободного падения $g$ и на высоту $h$ тела над поверхностью Земли:
Потенциальной энергией упруго деформированного тела называют величину, равную половине произведения коэффициента упругости (жесткости) $k$ тела на квадрат деформации $∆l$:
$E_p={1}/{2}k∆l^2$
Работа консервативных сил (тяжести и упругости) с учетом $E_p=mgh$ и $E_p={1}/{2}k∆l^2$ выражается следующим образом:
$A=E_{p_1}-E_{p_2}=-(E_{p_2}-E_{p_1})=-∆E_p$
Эта формула позволяет дать общее определение потенциальной энергии.
Потенциальной энергией системы называется зависящая от положения тел величина, изменение которой при переходе системы из начального состояния в конечное равно работе внутренних консервативных сил системы, взятой с противоположным знаком.
Знак «минус» в правой части уравнения $A=E_{p_1}-E_{p_2}=-(E_{p_2}-E_{p_1})=-∆E_p$ означает, что при совершении работы внутренними силами (например, падение тела на землю под действием силы тяжести в системе «камень — Земля») энергия системы убывает. Работа и изменение потенциальной энергии в системе всегда имеют противоположные знаки.
Поскольку работа определяет лишь изменение потенциальной энергии, то физический смысл в механике имеет только изменение энергии. Поэтому выбор нулевого уровня энергии произволен и определяется исключительно соображениями удобства, например, простотой записи соответствующих уравнений.
Закон изменения и сохранения механической энергии
Полной механической энергией системы называется сумма ее кинетической и потенциальной энергий:
Она определяется положением тел (потенциальная энергия) и их скоростью (кинетическая энергия).
Согласно теореме о кинетической энергии,
$E_k-E_{k_1}=A_p+A_{пр},$
где $А_р$ — работа потенциальных сил, $А_{пр}$ — работа непотенциальных сил.
В свою очередь, работа потенциальных сил равна разности потенциальной энергии тела в начальном $Е_{р_1}$ и конечном $Е_р$ состояниях. Учитывая это, получим выражение для закона изменения механической энергии:
$(E_k+E_p)-(E_{k_1}+E_{p_1})=A_{пр}$
где левая часть равенства — изменение полной механической энергии, а правая — работа непотенциальных сил.
Итак, закон изменения механической энергии гласит:
Изменение механической энергии системы равно работе всех непотенциальных сил.
Механическая система, в которой действуют только потенциальные силы, называется консервативной.
В консервативной системе $А_{пр} = 0$. Отсюда следует закон сохранения механической энергии:
В замкнутой консервативной системе полная механическая энергия сохраняется (не изменяется со временем):
$E_k+E_p=E_{k_1}+E_{p_1}$
Закон сохранения механической энергии выводится из законов механики Ньютона, которые применимы для системы материальных точек (или макрочастиц).
Однако закон сохранения механической энергии справедлив и для системы микрочастиц, где сами законы Ньютона уже не действуют.
Закон сохранения механической энергии является следствием однородности времени.
Однородность времени состоит в том, что при одинаковых начальных условиях протекание физических процессов не зависит от того, в какой момент времени эти условия созданы.
Закон сохранения полной механической энергии означает, что при изменении кинетической энергии в консервативной системе должна меняться и ее потенциальная энергия, так что их сумма остается постоянной. Это означает возможность превращения одного вида энергии в другой.
В соответствии с различными формами движения материи рассматривают различные виды энергии: механическую, внутреннюю (равную сумме кинетической энергии хаотического движения молекул относительно центра масс тела и потенциальной энергии взаимодействия молекул друг с другом), электромагнитную, химическую (которая складывается из кинетической энергии движения электронов и электрической энергии их взаимодействия друг с другом и с атомными ядрами), ядерную и пр. Из сказанного видно, что деление энергии на разные виды достаточно условно.
Явления природы обычно сопровождаются превращением одного вида энергии в другой. Так, например, трение частей различных механизмов приводит к превращению механической энергии в тепло, т. е. во внутреннюю энергию. В тепловых двигателях, наоборот, происходит превращение внутренней энергии в механическую; в гальванических элементах химическая энергия превращается в электрическую и т. д.
В настоящее время понятие энергии является одним из основных понятий физики. Это понятие неразрывно связано с представлением о превращении одной формы движения в другую.
Вот как в современной физике формулируется понятие энергии:
Энергия — общая количественная мера движения и взаимодействия всех видов материи. Энергия не возникает из ничего и не исчезает, она может только переходить из одной формы в другую. Понятие энергии связывает воедино все явления природы.
Простые механизмы. КПД механизмов
Простыми механизмами называются приспособления, изменяющие величину или направление приложенных к телу сил.
Они применяются для перемещения или подъема больших грузов с помощью небольших усилий. К ним относятся рычаг и его разновидности — блоки (подвижный и неподвижный), ворот, наклонная плоскость и ее разновидности — клин, винт и др.
Рычаг. Правило рычага
Рычаг представляет собой твердое тело, способное вращаться вокруг неподвижной опоры.

Правило рычага гласит:
Рычаг находится в равновесии, если приложенные к нему силы обратно пропорциональны их плечам:
${F_2}/{F_1}={l_1}/{l_2}$
Из формулы ${F_2}/{F_1}={l_1}/{l_2}$, применив к ней свойство пропорции (произведение крайних членов пропорции равно произведению ее средних членов), можно получить такую формулу:
Но $F_1l_1=M_1$ — момент силы, стремящейся повернуть рычаг по часовой стрелке, а $F_2l_2=M_2$ — момент силы, стремящейся повернуть рычаг против часовой стрелки. Таким образом, $M_1=M_2$, что и требовалось доказать.
Рычаг начал применяться людьми в глубокой древности. С его помощью удавалось поднимать тяжелые каменные плиты при постройке пирамид в Древнем Египте. Без рычага это было бы невозможно. Ведь, например, для возведения пирамиды Хеопса, имеющей высоту $147$ м, было использовано более двух миллионов каменных глыб, самая меньшая из которых имела массу $2.5$ тонн!
В наше время рычаги находят широкое применение как на производстве (например, подъемные краны), так и в быту (ножницы, кусачки, весы).
Неподвижный блок
Действие неподвижного блока аналогично действию рычага с равными плечами: $l_1=l_2=r$. Приложенная сила $F_1$ равна нагрузке $F_2$, и условие равновесия имеет вид:
Неподвижный блок применяют, когда нужно изменить направление силы, не меняя ее величину.
Подвижный блок
Подвижный блок действует аналогично рычагу, плечи которого составляют: $l_2={l_1}/{2}=r$. При этом условие равновесия имеет вид:
где $F_1$ — приложенная сила, $F_2$ — нагрузка. Применение подвижного блока дает выигрыш в силе в два раза.
Полиспаст (система блоков)

Обычный полиспаст состоит из $n$ подвижных и $n$ неподвижных блоков. Его применив дает выигрыш в силе в $2n$ раз:
$F_1={F_2}/{2n}$
Степенной полиспаст состоит из п подвижных и одного неподвижного блока. Применение степенного полиспаста дает выигрыш в силе в $2^n$ раз:
$F_1={F_2}/{2^n}$

Винт
Винт представляет собой наклонную плоскость, навитую на ось.
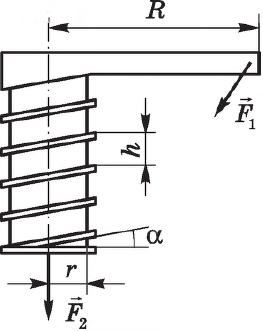
Условие равновесия сил, действующих на винт, имеет вид:
$F_1={F_2h}/{2πr}=F_2tgα, F_1={F_2h}/{2πR}$

где $F_1$ — внешняя сила, приложенная к винту и действующая на расстоянии $R$ от его оси; $F_2$ — сила, действующая в направлении оси винта; $h$ — шаг винта; $r$ — средний радиус резьбы; $α$ — угол наклона резьбы. $R$ — длина рычага (гаечного ключа), вращающего винт с силой $F_1$.
Коэффициент полезного действия
Коэффициент полезного действия (КПД) — отношение полезной работы ко всей затраченной работе.
Коэффициент полезного действия часто выражают в процентах и обозначают греческой буквой $η$ («эта»):
$η={A_п}/{A_3}·100%$
где $А_п$ — полезная работа, $А_3$ — вся затраченная работа.
Полезная работа всегда составляет лишь часть полной работы, которую затрачивает человек, используя тот или иной механизм.
Часть совершенной работы тратится на преодоление сил трения. Поскольку $А_3 > А_п$, КПД всегда меньше $1$ (или $< 100%$).
Поскольку каждую из работ в этом равенстве можно выразить в виде произведения соответствующей силы на пройденный путь, то его можно переписать так: $F_1s_1≈F_2s_2$.
Отсюда следует, что, выигрывая с помощью механизма в силе, мы во столько же раз проигрываем в пути, и наоборот . Этот закон называют золотым правилом механики.
Золотое правило механики является приближенным законом, так как в нем не учитывается работа по преодолению трения и силы тяжести частей используемых приспособлений. Тем не менее оно бывает очень полезным при анализе работы любого простого механизма.

Так, например, благодаря этому правилу сразу можно сказать, что рабочему, изображенному на рисунке, при двукратном выигрыше в силе подъема груза на $10$ см придется опустить противоположный конец рычага на $20$ см.
Столкновение тел. Упругий и неупругий удары
Законы сохранения импульса и механической энергии применяются для решения задачи о движении тел после столкновения: по известным импульсам и энергиям до столкновения определяются значения этих величин после столкновения. Рассмотрим случаи упругого и неупругого ударов.
Абсолютно неупругим называется удар, после которого тела образуют единое тело, движущееся с определенной скоростью. Задача о скорости последнего решается с помощью закона сохранения импульса системы тел с массами $m_1$ и $m_2$ (если речь идет о двух телах) до и после удара:
$m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=(m_1+m_2)υ↖{→}$
Очевидно, что кинетическая энергия тел при неупругом ударе не сохраняется (например, при ${υ_1}↖{→}=-{υ_2}↖{→}$ и $m_1=m_2$ она становится равной нулю после удара).
Абсолютно упругим называется удар, при котором сохраняется не только сумма импульсов, но и сумма кинетических энергий ударяющихся тел.
Для абсолютно упругого удара справедливы уравнения
$m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=m_1{υ"_1}↖{→}+m_2{υ"_2}↖{→};$
${m_{1}υ_1^2}/{2}+{m_{2}υ_2^2}/{2}={m_1(υ"_1)^2}/{2}+{m_2(υ"_2)^2}/{2}$
где $m_1, m_2$ — массы шаров, $υ_1, υ_2$ —скорости шаров до удара, $υ"_1, υ"_2$ —скорости шаров после удара.
Простые наблюдения и опыты доказывают, что покой и движение относительны, скорость тела зависит от выбора системы отсчета; по второму закону Ньютона независимо от того, находилось ли тело в покое или двигалось, изменение скорости его движения может происходить только под действием силы, т. е. в результате взаимодействия с другими телами. Однако существуют величины, которые могут сохраняться при взаимодействии тел. Такими величинами являются энергия и импульс .
Импульсом тела называют векторную физиче¬скую величину, являющуюся количественной характеристикой поступательного движения тел. Импульс обозначается . Импульс тела равен произведению массы тела на его скорость: . Направление вектора импульса р совпадает с направлением вектора скорости тела . Единица импульса - .
Для импульса системы тел выполняется закон сохранения, который справедлив только для замкнутых физических систем. В общем случае замкнутой называют систему, которая не обменивается энергией и массой с телами и полями, не входящими в нее. В механике замкнутой называют систему, на которую не действуют внешние силы или действие этих сил скомпенсировано. В этом случае , где - начальный импульс системы, а - конечный. В случае двух тел, входящих в систему, это выражение имеет вид , где - массы тел, а - скорости до взаимодействия, - скорости после взаимодействия (рис. 4). Эта формула и является математическим выражением закона сохранения импульса: импульс замкнутой физической системы сохраняется при любых взаимодействиях, происходящих внутри этой системы. Другими словами: в замкнутой физической системе геометрическая сумма импульсов тел до взаимодействия равна геометрической сумме импульсов этих тел после взаимодействия . В случае незамкнутой системы импульс тел системы не сохраняется. Однако если и системе существует направление, по которому внешние силы не действуют или их действие скомпенсировано, то сохраняется проекция импульса на это направление. Кроме того, если время взаимодействия мало (выстрел, взрыв, удар), то за это время даже в случае незамкнутой системы внешние силы незначительно изменяют импульсы взаимодействующих тел. Поэтому для практических расчетов в этом случае тоже можно применять закон сохранения импульса.

Экспериментальные исследования взаимодействий различных тел - от планет и звезд до атомов и элементарных частиц - показали, что в любой системе взаимодействующих тел при отсутствии действия со стороны других тел, не входящих в систему, или равенстве нулю суммы действующих сил геометрическая сумма импульсов тел действительно остается неизменной.
В механике закон сохранения импульса и законы Ньютона связаны между собой. Если на тело массой в
течение времени действует сила и скорость его движения изменяется от до , то ускорение движения а тела равно ![]() . На основании второго
закона Ньютона для силы можно записать
. На основании второго
закона Ньютона для силы можно записать ![]() ,
отсюда следует
,
отсюда следует
![]() .
- векторная физическая величина, характеризующая действие на тело силы за некоторый промежуток
времени и равная произведению силы на время ее действия, называется импульсом силы
. Единица импульса силы -
.
.
- векторная физическая величина, характеризующая действие на тело силы за некоторый промежуток
времени и равная произведению силы на время ее действия, называется импульсом силы
. Единица импульса силы -
.
Закон сохранения импульса лежит в основе реактивного движения. Реактивное движение - это такое движение тела, которое возникает после отделения от тела его части.
Пусть тело массой покоилось. От тела отделилась какая-то его часть массой со скоростью Тогда оставшаяся часть придет в движение в противоположную сторону со скоростью , масса оставшейся части . Действительно, сумма импульсов обеих частей тела до отделения была равна нулю и после разделения будет равна нулю:
Отсюда .
Большая заслуга в развитии теории реактивного движения принадлежит К. Э. Циолковскому.
Он разработал теорию полета тела переменной массы (ракеты) в однородном поле тяготения и рассчитал запасы топлива, необходимые для преодоления силы земного притяжения; основы теории жид¬костного реактивного двигателя, а также элементы его конструкции; теорию многоступенчатых ракет, причем предложил два варианта: параллельный (несколько реактивных двигателей работают одновременно) и последовательный (реактивные двигатели работают друг за другом). К. Э. Циолковский строго научно доказал возможность полета в космос с помощью ракет с жидкостным реактивным двигателем, предложил специальные траектории посадки космических аппаратов на Землю, выдвинул идею создания межпланетных орбитальных станций и подробно рассмотрел условия жизни и жизнеобеспечения на них. Технические идеи Циолковского находят применение при создании современной ракетно-космической техники. Движение с помощью реактивной струи по закону сохранения импульса лежит в основе гидрореактивного двигателя. В основе движения многих морских моллюсков (осьминогов, медуз, кальмаров, каракатиц) также лежит реактивный принцип.
Распространенные ошибки
1. Встречались абитуриенты, допускавшие грубую ошибку при объяснении принципа действия реактивного двигателя. Они утверждали, что движение реактивного самолета обусловлено взаимодействием выбрасываемых газов и воздуха: самолет действует на воздух, а воздух, согласно третьему закону Ньютона,- на самолет, в результате чего он движется. Это, конечно, неверно. ДЕйствительной причиной движения реактивного самолета является взаимодействие истекающих из сопла газов, которые образуются при сгорании топлива. За счет большого давления в камере сгорания эти газы приобретают некоторый импульс, поэтому, согласно закону сохранения импуьса, самолет получает такой же по модулю, но противоположный по направлению импульс. Так что самолет не отталкивается от воздуха. Напротив, атмосферный воздух является лишь помехой движению самолета.
2. Некоторый учащиеся не могут дать полный и правильный ответ на вопрос: в какиз случаях можно применять закон сохранения импульса. Полезно запомнить следующие критерии его применимости:
- система тел замкнута, т.е. на тела этой системы не действуют внешние силы;
- на тела системы действуют внешние силы, но их векторная сумма равна нулю
- система не замкнута, но сумма проекций всех внешних сил на какую-либо координатную ось равна нулю; тогда остается постоянной и сумма проекций импульсов всех тел системы на эту ось.
- время взаимодействия тел мало (например, время удара, выстрела, взрыва); в этом случае импульсаом внешних сил можно пренебречь и рассматривать систему как замкнутую.
И́мпульс (Количество движения) - векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этой точки на её скорость v, направление импульса совпадает с направлением вектора скорости:
Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
Вывод из законов Ньютона
Рассмотрим выражение определения силы
Перепишем его для системы из N частиц:
где суммирование идет по всем силам, действующим на n-ю частицу со стороны m-ой. Согласно третьему закону Ньютона, силы вида и будут равны по абсолютному значению и противоположны по направлению, то есть Тогда после подстановки полученного результата в выражение (1) правая часть будет равна нулю, то есть:

Как известно, если производная от некоторого выражения равна нулю, то это выражение есть постоянная величина относительно переменной дифференцирования, а значит:
 (постоянный вектор).
(постоянный вектор).
То есть суммарный импульс системы частиц есть величина постоянная. Нетрудно получить аналогичное выражение для одной частицы.
Следует учесть, что вышеприведенные рассуждения справедливы лишь для замкнутой системы.
Также стоит подчеркнуть, что изменение импульса зависит не только от действующей на тело силы, но и от продолжительности её действия.
Для вывода закона сохранения импульса рассмотрим некоторые понятия. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой . Силы взаимодействия между материальными точками механической системы называются - внутренними . Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними . Механическая система тел, на которую не действуют внешние силы, называется замкнутой (или изолированной ). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.
Рассмотрим механическую систему, состоящую из n тел, масса и скорость которых соответственно равны m 1 , m 2 , .... m n , и v 1 , v 2 ,..., v n . Пусть - равнодействующие внутренних сил, действующих на каждое из этих тел, a - равнодействующие внешних сил. Запишем второй закон Ньютона для каждого из n тел механической системы:

Складывая почленно эти уравнения, получаем
Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то
где - импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
В случае отсутствия внешних сил (рассматриваем замкнутую систему)
Последнее выражение и является законом сохранения импульса : импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения импульса справедлив не только в классической физике, хотя он и получен как следствие законов Ньютона. Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон сохранения импульса - фундаментальный закон природы.
Закон сохранения импульса является следствием определенного свойства симметрии пространства - его однородности. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора положения начала координат инерциальной системы отсчета.
Отметим, что, согласно (9.1), импульс сохраняется и для незамкнутой системы, если геометрическая сумма всех внешних сил равна нулю.
В механике Галилея-Ньютона из-за независимости массы от скорости импульс системы может быть выражен через скорость ее центра масс. Центром масс (или центром инерции ) системы материальных точек называется воображаемая точка С ,положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен
где m i и r i - соответственно масса и радиус-вектор i -й материальной точки; n - число материальных точек в системе; – масса системы. Скорость центра масс
Учитывая, что pi = m i v i , a есть импульс р системы, можно написать
т. е. импульс системы равен произведению массы системы на скорость ее центра масс.
Подставив выражение (9.2) в уравнение (9.1), получим
![]() (9.3)
(9.3)
т. е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, приложенных к системе. Выражение (9.3) представляет собойзакон движения центра масс.