Математическим маятником называют материальную точку, подвешенную на невесомой и нерастяжимой нити, прикрепленной к подвесу и находящейся в поле силы тяжести (или иной силы).
Исследуем колебания математического маятника в инерциальной системе отсчета, относительно которой точка его подвеса находится в покое или движется равномерно прямолинейно. Силой сопротивления воздуха будем пренебрегать (идеальный математический маятник). Первоначально маятник покоится в положении равновесия С. При этом действующие на него сила тяжести \(\vec F\) и сила упругости \(\vec F_{ynp}\) нити взаимно компенсируются.
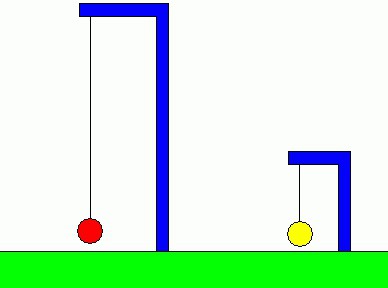
Выведем маятник из положения равновесия (отклонив его, например, в положение А) и отпустим без начальной скорости (рис. 13.11). В этом случае силы \(\vec F\) и \(\vec F_{ynp}\) не уравновешивают друг друга. Тангенциальная составляющая силы тяжести \(\vec F_\tau\), действуя на маятник, сообщает ему тангенциальное ускорение \(\vec a_\tau\) (составляющая полного ускорения, направленная вдоль касательной к траектории движения математического маятника), и маятник начинает двигаться к положению равновесия с возрастающей по модулю скоростью. Тангенциальная составляющая силы тяжести \(\vec F_\tau\) является, таким образом, возвращающей силой. Нормальная составляющая \(\vec F_n\) силы тяжести направлена вдоль нити против силы упругости \(\vec F_{ynp}\). Равнодействующая сил \(\vec F_n\) и \(\vec F_{ynp}\) сообщает маятнику нормальное ускорение \(~a_n\), которое изменяет при этом направление вектора скорости, и маятник движется по дуге ABCD.
Чем ближе подходит маятник к положению равновесия С, тем меньше становится значение тангенциальной составляющей \(~F_\tau = F \sin \alpha\). В положении равновесия она равна нулю, а скорость достигает максимального значения, и маятник движется по инерции дальше, поднимаясь по дуге вверх. При этом составляющая \(\vec F_\tau\) направлена против скорости. С увеличением угла отклонения а модуль силы \(\vec F_\tau\) увеличивается, а модуль скорости уменьшается, и в точке D скорость маятника становится равной нулю. Маятник на мгновение останавливается, а затем начинает двигаться в обратном направлении к положению равновесия. Вновь пройдя его по инерции, маятник, замедляя движение, дойдет до точки А (трение отсутствует), т.е. совершит полное колебание. После этого движение маятника будет повторяться в уже описанной последовательности.
Получим уравнение, описывающее свободные колебания математического маятника.
Пусть маятник в данный момент времени находится в точке В. Его смещение S от положения равновесия в этот момент равно длине дуги СВ (т.е. S = |СВ|). Обозначим длину нити подвеса l , а массу маятника - m .
Из рисунка 13.11 видно, что \(~F_\tau = F \sin \alpha\), где \(\alpha =\frac{S}{l}.\) При малых углах \(~(\alpha <10^\circ)\) отклонения маятника \(\sin \alpha \approx \alpha,\) поэтому
\(F_\tau = -F\frac{S}{l} = -mg\frac{S}{l}.\)
Знак минус в этой формуле ставят потому, что тангенциальная составляющая силы тяжести направлена к положению равновесия, а смещение отсчитывают от положения равновесия.
Согласно второму закону Ньютона \(m \vec a = m \vec g + F_{ynp}.\) Спроецируем векторные величины этого уравнения на направление касательной к траектории движения математического маятника
\(~F_\tau = ma_\tau .\)
Из этих уравнений получим
\(a_\tau = -\frac{g}{l}S\) - динамическое уравнение движения математического маятника. Тангенциальное ускорение математического маятника пропорционально его смещению и направлено к положению равновесия. Это уравнение можно записать в виде\. Сравнивая его с уравнением гармонических колебаний \(~a_x + \omega^2x = 0\) (см. § 13.3), можно сделать вывод, что математический маятник совершает гармонические колебания. А так как рассмотренные колебания маятника происходили под действием только внутренних сил, то это были свободные колебания маятника. Следовательно, свободные колебания математического маятника при малых отклонениях являются гармоническими.
Обозначим \(\frac{g}{l} = \omega^2.\) Откуда \(\omega = \sqrt \frac{g}{l}\) - циклическая частота колебаний маятника.
Период колебаний маятника \(T = \frac{2 \pi}{\omega}.\) Следовательно,
\(T = 2 \pi \sqrt{ \frac{l}{g} }\)
Это выражение называют формулой Гюйгенса. Оно определяет период свободных колебаний математического маятника. Из формулы следует, что при малых углах отклонения от положения равновесия период колебаний математического маятника: 1) не зависит от его массы и амплитуды колебаний; 2) пропорционален корню квадратному из длины маятника и обратно пропорционален корню квадратному из ускорения свободного падения. Это согласуется с экспериментальными законами малых колебаний математического маятника, которые были открыты Г. Галилеем.
Подчеркнем, что эту формулу можно использовать для расчета периода при одновременном выполнении двух условий: 1) колебания маятника должны быть малыми; 2) точка подвеса маятника должна покоиться или двигаться равномерно прямолинейно относительно инерциальной системы отсчета, в которой он находится.
Если точка подвеса математического маятника движется с ускорением \(\vec a\) то при этом изменяется сила натяжения нити, что приводит к изменению и возвращающей силы, а следовательно, частоты и периода колебаний. Как показывают расчеты, период колебаний маятника в этом случае можно рассчитать по формуле
\(T = 2 \pi \sqrt{ \frac{l}{g"} }\)
где \(~g"\) - "эффективное" ускорение маятника в неинерциальной системе отсчета. Оно равно геометрической сумме ускорения свободного падения \(\vec g\) и вектора, противоположного вектору \(\vec a\), т.е. его можно рассчитать по формуле
\(\vec g" = \vec g + (- \vec a).\)
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. - Мн.: Адукацыя i выхаванне, 2004. - С. 374-376.
В технике и окружающем нас мире часто приходится сталкиваться с периодическими процессами, которые повторяются через одинаковые промежутки времени. Такие процессы называют колебательными . Колебаниями называют изменения физической величины, происходящие по определенному закону во времени. Колебательные явления различной физической природы подчиняются общим закономерностям. Например, колебания тока в электрической цепи и колебания математического маятника могут описываться одинаковыми уравнениями. Общность колебательных закономерностей позволяет рассматривать колебательные процессы различной природы с единой точки зрения.
Механическими колебаниями называют движения тел, повторяющиеся точно через одинаковые промежутки времени. Примерами простых колебательных систем могут служить груз на пружине или математический маятник. Для существования в системе гармонических колебаний необходимо, чтобы у нее было положение устойчивого равновесия, то есть такое положение, при выведении из которого на систему начала бы действовать возвращающая сила.
Механические колебания, как и колебательные процессы любой другой физической природы, могут быть свободными и вынужденными . Свободные колебания совершаются под действием внутренних сил системы, после того, как система была выведена из состояния равновесия. Колебания груза на пружине или колебания маятника являются свободными колебаниями. Колебания, происходящие под действием внешних периодически изменяющихся сил, называются вынужденными .
Простейшим видом колебательного процесса являются колебания, происходящие по закону синуса или косинуса, называемые гармоническими колебаниями . Уравнение описывающее физические системы способные совершать гармонические колебания с циклической частотой ω 0 задаётся следующим образом:
Решение предыдущего уравнения является уравнением движения для гармонических колебаний , которое имеет вид:
где: x – смещение тела от положение равновесия, A – амплитуда колебаний, то есть максимальное смещение от положения равновесия, ω – циклическая или круговая частота колебаний (ω = 2Π /T ), t – время. Величина, стоящая под знаком косинуса: φ = ωt + φ 0 , называется фазой гармонического процесса. Смысл фазы колебаний: стадия, в которой колебание находится в данный момент времени. При t = 0 получаем, что φ = φ 0 , поэтому φ 0 называют начальной фазой (то есть той стадией, из которой начиналось колебание).
Минимальный интервал времени, через который происходит повторение движения тела, называется периодом колебаний T . Если же количество колебаний N , а их время t , то период находится как:
Физическая величина, обратная периоду колебаний, называется частотой колебаний :
Частота колебаний ν показывает, сколько колебаний совершается за 1 с. Единица частоты – Герц (Гц). Частота колебаний связана с циклической частотой ω и периодом колебаний T соотношениями:
![]()
Зависимость скорости от времени при гармонических механических колебаниях выражается следующей формулой:
Максимальное значение скорости при гармонических механических колебаниях:
Максимальные по модулю значения скорости υ m = ωA достигаются в те моменты времени, когда тело проходит через положения равновесия (x = 0). Аналогичным образом определяется ускорение a = a x тела при гармонических колебаниях. Зависимость ускорения от времени при гармонических механических колебаниях:
Максимальное значение ускорения при механических гармонических колебаниях:
Знак минус в предыдущем выражении означает, что ускорение a (t ) всегда имеет знак, противоположный знаку смещения x (t ), и, следовательно, возвращает тело в начальное положение (x = 0), т.е. заставляет тело совершать гармонические колебания.
Следует обратить внимание на то, что:
- физические свойства колебательной системы определяют только собственную частоту колебаний ω 0 или период T .
- Такие параметры процесса колебаний, как амплитуда A = x m и начальная фаза φ 0 , определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени, т.е. начальными условиями.
- При колебательном движении тело за время, равное периоду, проходит путь, равный 4 амплитудам. При этом тело возвращается в исходную точку, то есть перемещение тела будет равно нулю. Следовательно, путь равный амплитуде тело пройдет за время равное четверти периода.
Чтобы определить, когда в уравнение колебаний подставлять синус, а когда косинус, нужно обратить внимание на следующие факторы:
- Проще всего, если в условии задачи колебания названы синусоидальными или косинусоидальными.
- Если сказано, что тело толкнули из положения равновесия – берем синус с начальной фазой, равной нулю.
- Если сказано, что тело отклонили и отпустили – косинус с начальной фазой, равной нулю.
- Если тело толкнули из отклоненного от положения равновесия состояния, то начальная фаза не равна нолю, а брать можно и синус и косинус.
Математический маятник
Математическим маятником называют тело небольших размеров, подвешенное на тонкой, длинной и нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. Только в случае малых колебаний математический маятник является гармоническим осциллятором , то есть системой, способной совершать гармонические (по закону sin или cos) колебания. Практически такое приближение справедливо для углов порядка 5–10°. Колебания маятника при больших амплитудах не являются гармоническими.
Циклическая частота колебаний математического маятника рассчитывается по формуле:
Период колебаний математического маятника:

Полученная формула называется формулой Гюйгенса и выполняется, когда точка подвеса маятника неподвижна . Важно запомнить, что период малых колебаний математического маятника не зависит от амплитуды колебаний. Такое свойство маятника называется изохронностью . Как и для любой другой системы, совершающей механические гармонические колебания, для математического маятника выполняются следующие соотношения:
- Путь от положения равновесия до крайней точки (или обратно) проходится за четверть периода.
- Путь от крайней точки до половины амплитуды (или обратно) проходится за одну шестую периода.
- Путь от положения равновесия до половины амплитуды (или обратно) проходится за одну двенадцатую долю периода.
Пружинный маятник
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению. Таким свойством обладает сила упругости.
Таким образом, груз некоторой массы m , прикрепленный к пружине жесткости k , второй конец которой закреплен неподвижно, составляют систему, способную совершать в отсутствие трения свободные гармонические колебания. Груз на пружине называют пружинным маятником .
Циклическая частота колебаний пружинного маятника рассчитывается по формуле:
Период колебаний пружинного маятника:

При малых амплитудах период колебаний пружинного маятника не зависит от амплитуды (как и у математического маятника). При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину x 0 , равную:
А колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты ω 0 и периода колебаний T справедливы и в этом случае. Таким образом, полученная формула для периода колебаний груза на пружине остается справедливой во всех случаях, независимо от направления колебаний, движения опоры, действия внешних постоянных сил.
При свободных механических колебаниях кинетическая и потенциальная энергии периодически изменяются. При максимальном отклонении тела от положения равновесия его скорость, а, следовательно, и кинетическая энергия обращаются в нуль. В этом положении потенциальная энергия колеблющегося тела достигает максимального значения. Для груза на пружине потенциальная энергия – это энергия упругой деформации пружины. Для математического маятника – это энергия в поле тяготения Земли.
Когда тело при своем движении проходит через положение равновесия, его скорость максимальна. Тело проскакивает положение равновесия по инерции. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией (как правило, потенциальную энергию в положении равновесия полагают равной нулю). Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии. При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и так далее.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот. Если в колебательной системе отсутствует трение, то полная механическая энергия при свободных колебаниях остается неизменной. При этом, максимальное значение кинетической энергии при механических гармонических колебаниях задаётся формулой:

Максимальное значение потенциальной энергии при механических гармонических колебаниях пружинного маятника:

Взаимосвязь энергетических характеристик механического колебательного процесса (полная механическая энергия равна максимальным значениям кинетической и потенциальной энергий, а также сумме кинетической и потенциальной энергий в произвольный момент времени):

Механические волны
Если в каком-нибудь месте твердой, жидкой или газообразной среды возбуждены колебания частиц, то вследствие взаимодействия атомов и молекул среды колебания начинают передаваться от одной точки к другой с конечной скоростью. Процесс распространения колебаний в среде называется волной .
Механические волны бывают разных видов. Если при распространении волны частицы среды испытывают смещение в направлении, перпендикулярном направлению распространения, такая волна называется поперечной . Если смещение частиц среды происходит в направлении распространения волны, такая волна называется продольной .
Как в поперечных, так и в продольных волнах не происходит переноса вещества в направлении распространения волны. В процессе распространения частицы среды лишь совершают колебания около положений равновесия. Однако волны переносят энергию колебаний от одной точки среды к другой.
Характерной особенностью механических волн является то, что они распространяются в материальных средах (твердых, жидких или газообразных). Существуют немеханические волны, которые способны распространяться и в пустоте (например, световые, т.е. электромагнитные волны могут распространяться в вакууме).
- Продольные механические волны могут распространяться в любых средах – твердых, жидких и газообразных.
- Поперечные волны не могут существовать в жидкой или газообразной средах.
Значительный интерес для практики представляют простые гармонические или синусоидальные волны. Они характеризуются амплитудой A колебания частиц, частотой ν и длиной волны λ . Синусоидальные волны распространяются в однородных средах с некоторой постоянной скоростью υ .
Длиной волны λ называют расстояние между двумя соседними точками, колеблющимися в одинаковых фазах. Расстояние, равное длине волны λ , волна пробегает за время равное периоду T , следовательно, длина волны может быть рассчитана по формуле:
где: υ – скорость распространения волны. При переходе волны из одной среды в другую длина волны и скорость ее распространения меняются. Неизменными остаются только частота и период волны.
Разность фаз колебаний двух точек волны, расстояние между которыми l рассчитывается по формуле:
Электрический контур
В электрических цепях, так же, как и в механических системах, таких как груз на пружине или маятник, могут возникать свободные колебания. Простейшей электрической системой, способной совершать свободные колебания, является последовательный LC-контур . В отсутствие затухания свободные колебания в электрическом контуре являются гармоническими. Энергетические характеристики и их взаимосвязь при колебаниях в электрическом контуре:

Период гармонических колебаний в электрическом колебательном контуре определяется по формуле:
![]()
Циклическая частота колебаний в электрическом колебательном контуре:

Зависимость заряда на конденсаторе от времени при колебаниях в электрическом контуре описывается законом:
![]()
Зависимость электрического тока протекающего через катушку индуктивности от времени при колебаниях в электрическом контуре:
Зависимость напряжения на конденсаторе от времени при колебаниях в электрическом контуре:

Максимальное значение силы тока при гармонических колебаниях в электрическом контуре может быть рассчитано по формуле:
Максимальное значение напряжения на конденсаторе при гармонических колебаниях в электрическом контуре:
Все реальные контура содержат электрическое сопротивление R . Процесс свободных колебаний в таком контуре уже не подчиняется гармоническому закону. За каждый период колебаний часть электромагнитной энергии, запасенной в контуре, превращается в теплоту, выделяющуюся на резисторе, и колебания становятся затухающими.
Переменный ток. Трансформатор
Основная часть электроэнергии в мире в настоящее время вырабатывается генераторами переменного тока, создающими синусоидальное напряжение. Они позволяют наиболее просто и экономно осуществлять передачу, распределение и использование электрической энергии.
Устройство, предназначенное для превращения механической энергии в энергию переменного тока, называется генератором переменного тока . Он характеризуется переменным напряжением U (t ) (индуцированной ЭДС) на его клеммах. В основу работы генератора переменного тока положено явление электромагнитной индукции.
Переменным током называется электрический ток, который изменяется с течением времени по гармоническому закону. Величины U 0 , I 0 = U 0 /R называются амплитудными значениями напряжения и силы тока. Значения напряжения U (t ) и силы тока I (t ), зависящие от времени, называют мгновенными .
Переменный ток характеризуется действующими значениями силы тока и напряжения. Действующим (эффективным) значением переменного тока называется сила такого постоянного тока, который, проходя по цепи, выделил бы в единицу времени такое же количество теплоты, что и данный переменный ток. Для переменного тока действующее значение силы тока может быть рассчитано по формуле:
Аналогично можно ввести действующее (эффективное) значение и для напряжения , рассчитываемое по формуле:
Таким образом, выражения для мощности постоянного тока остаются справедливыми и для переменного тока, если использовать в них действующие значения силы тока и напряжения:

Обратите внимание, что если идет речь о напряжении или силе переменного тока, то (если не сказано иного) имеется в виду именно действующее значение. Так, 220В – это действующее напряжение в домашней электросети.
Конденсатор в цепи переменного тока
Строго говоря, конденсатор ток не проводит (в том смысле, что носители заряда через него не протекают). Поэтому, если конденсатор подключен в цепь постоянного тока, то сила тока в любой момент времени в любой точке цепи равна нулю. При подключении в цепь переменного тока из-за постоянного изменения ЭДС конденсатор перезаряжается. Ток через него по-прежнему не течет, но ток в цепи существует. Поэтому условно говорят, что конденсатор проводит переменный ток. В этом случае вводится понятие сопротивления конденсатора в цепи переменного тока (или емкостного сопротивления
Обратите внимание, что емкостное сопротивление зависит от частоты переменного тока. Оно в корне отличается от привычного нам сопротивления R. Так, на сопротивлении R выделяется теплота (поэтому его часто называют активным), а на емкостном сопротивлении теплота не выделяется. Активное сопротивление связано со взаимодействием носителей заряда при протекании тока, а емкостное – с процессами перезарядки конденсатора.
Катушка индуктивности в цепи переменного тока
При протекании переменного тока в катушке возникает явление самоиндукции, и, следовательно, ЭДС. Из-за этого напряжение и сила тока в катушке не совпадают по фазе (когда сила тока равна нулю, напряжение имеет максимальное значение и наоборот). Из-за такого несовпадения средняя тепловая мощность, выделяющаяся в катушке, равна нулю. В этом случае вводится понятие сопротивления катушки в цепи переменного тока (или индуктивного сопротивления ). Это сопротивление определяется выражением:
Обратите внимание, что индуктивное сопротивление зависит от частоты переменного тока. Как и емкостное сопротивление, оно отличается от сопротивления R. Как и на емкостном сопротивлении, на индуктивном сопротивлении теплота не выделяется. Индуктивное сопротивление связано с явлением самоиндукции в катушке.
Трансформаторы
Среди приборов переменного тока, нашедших широкое применение в технике, значительное место занимают трансформаторы . Принцип действия трансформаторов, применяемых для повышения или понижения напряжения переменного тока, основан на явлении электромагнитной индукции. Простейший трансформатор состоит из сердечника замкнутой формы, на который намотаны две обмотки: первичная и вторичная . Первичная обмотка подсоединяется к источнику переменного тока с некоторым напряжением U 1 , а вторичная обмотка подключается к нагрузке, на которой появляется напряжение U 2 . При этом, если число витков в первичной обмотке равно n 1 , а во вторичной n 2 , то выполняется следующее соотношение:
Коэффициент трансформации вычисляется по формуле:
Если трансформатор идеальный, то выполняется следующее соотношение (мощности на входе и выходе равны):
В неидеальном трансформаторе вводится понятие КПД:
Электромагнитные волны
Электромагнитные волны – это распространяющееся в пространстве и во времени электромагнитное поле. Электромагнитные волны поперечны – векторы электрической напряженности и магнитной индукции перпендикулярны друг другу и лежат в плоскости, перпендикулярной направлению распространения волны. Электромагнитные волны распространяются в веществе с конечной скоростью, которая может быть рассчитана по формуле:
![]()
где: ε и μ – диэлектрическая и магнитная проницаемости вещества, ε 0 и μ 0 – электрическая и магнитная постоянные: ε 0 = 8,85419·10 –12 Ф/м, μ 0 = 1,25664·10 –6 Гн/м. Скорость электромагнитных волн в вакууме (где ε = μ = 1) постоянна и равна с = 3∙10 8 м/с, она также может быть вычислена по формуле:
![]()
Скорость распространения электромагнитных волн в вакууме является одной из фундаментальных физических постоянных. Если электромагнитная волна распространяется в какой-либо среде, то скорость ее распространения также выражается следующим соотношением:
где: n – показатель преломления вещества – физическая величина, показывающая во сколько раз скорость света в среде меньше чем в вакууме. Показатель преломления, как видно из предыдущих формул, может быть рассчитан следующим образом:
- Электромагнитные волны переносят энергию. При распространении волн возникает поток электромагнитной энергии.
- Электромагнитные волны могут возбуждаться только ускоренно движущимися зарядами. Цепи постоянного тока, в которых носители заряда движутся с неизменной скоростью, не являются источником электромагнитных волн. А вот цепи, в которых протекает переменный ток, т.е. такие цепи в которых носители заряда постоянно меняют направление своего движения, т.е. двигаются с ускорением – являются источником электромагнитных волн. В современной радиотехнике излучение электромагнитных волн производится с помощью антенн различных конструкций, в которых возбуждаются быстропеременные токи.
Механическая система, которая состоит из материальной точки (тела), висящей на нерастяжимой невесомой нити (ее масса ничтожно мала по сравнению с весом тела) в однородном поле тяжести, называется математическим маятником (другое название - осциллятор). Бывают и другие виды этого устройства. Вместо нити может быть использован невесомый стержень. Математический маятник может наглядно раскрыть суть многих интересных явлений. При малой амплитуде колебания его движение называется гармоническим.
Общие сведения о механической системе
Формула периода колебания этого маятника была выведена голландским ученым Гюйгенсом (1629-1695 гг.). Этот современник И. Ньютона очень увлекался данной механической системой. В 1656 г. он создал первые часы с маятниковым механизмом. Они измеряли время с исключительной для тех времен точностью. Это изобретение стало важнейшим этапом в развитии физических экспериментов и практической деятельности.
Если маятник находится в положении равновесия (висит отвесно), то будет уравновешиваться силой натяжения нити. Плоский маятник на нерастяжимой нити является системой с двумя степенями свободы со связью. При смене всего одного компонента меняются характеристики всех ее частей. Так, если нитку заменить на стержень, то у данной механической системы будет всего 1 степень свободы. Какими же свойствами обладает математический маятник? В этой простейшей системе под воздействием периодического возмущения возникает хаос. В том случае, когда точка подвеса не двигается, а совершает колебания, у маятника появляется новое положение равновесия. При быстрых колебаниях вверх-вниз эта механическая система приобретает устойчивое положение «вверх тормашками». У нее есть и свое название. Ее называют маятником Капицы.
Свойства маятника
Математический маятник имеет очень интересные свойства. Все они подтверждаются известными физическими законами. Период колебаний любого другого маятника зависит от разных обстоятельств, таких как размер и форма тела, расстояние между точкой подвеса и центром тяжести, распределение массы относительно данной точки. Именно поэтому определение периода висящего тела является довольно сложной задачей. Намного легче вычисляется период математического маятника, формула которого будет приведена ниже. В результате наблюдений над подобными механическими системами можно установить такие закономерности:
Если, сохраняя одинаковую длину маятника, подвешивать различные грузы, то период их колебаний получится одинаковым, хотя их массы будут сильно различаться. Следовательно, период такого маятника не зависит от массы груза.
Если при запуске системы отклонять маятник на не слишком большие, но разные углы, то он станет колебаться с одинаковым периодом, но по разным амплитудам. Пока отклонения от центра равновесия не слишком велики, колебания по своей форме будут достаточно близки гармоническим. Период такого маятника никак не зависит от колебательной амплитуды. Это свойство данной механической системы называется изохронизмом (в переводе с греческого «хронос» - время, «изос» - равный).
Период математического маятника
Этот показатель представляет собой период собственных колебаний. Несмотря на сложную формулировку, сам процесс очень прост. Если длина нити математического маятника L, а ускорение свободного падения g, то эта величина равна:
Период малых ни в какой мере не зависит от массы маятника и амплитуды колебаний. В этом случае маятник двигается как математический с приведенной длиной.
Колебания математического маятника

Математический маятник совершает колебания, которые можно описать простым дифференциальным уравнением:
x + ω2 sin x = 0,
где х (t) - неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); ω - положительная константа, которая определяется из параметров маятника (ω = √g/L, где g - это ускорение свободного падения, а L - длина математического маятника (подвес).
Уравнение малых колебаний вблизи положення равновесия (гармоническое уравнение) выглядит так:
x + ω2 sin x = 0
Колебательные движения маятника
Математический маятник, который совершает малые колебания, двигается по синусоиде. Дифференциальное уравнение второго порядка отвечает всем требованиям и параметрам такого движения. Для определения траектории необходимо задать скорость и координату, из которых потом определяются независимые константы:
x = A sin (θ 0 + ωt),
где θ 0 - начальная фаза, A - амплитуда колебания, ω - циклическая частота, определяемая из уравнения движения.
Математический маятник (формулы для больших амплитуд)
Данная механическая система, совершающая свои колебания со значительной амплитудой, подчиняется более сложным законам движения. Для такого маятника они рассчитываются по формуле:
sin x/2 = u * sn(ωt/u),
где sn - синус Якоби, который для u < 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
где ε = E/mL2 (mL2 - энергия маятника).
Определение периода колебания нелинейного маятника осуществляется по формуле:
где Ω = π/2 * ω/2K(u), K - эллиптический интеграл, π - 3,14.

Движение маятника по сепаратрисе
Сепаратрисой называют траекторию динамической системы, у которой двумерное фазовое пространство. Математический маятник движется по ней непериодически. В бесконечно дальнем моменте времени он падает из крайнего верхнего положения в сторону с нулевой скоростью, затем постепенно набирает ее. В конечном итоге он останавливается, вернувшись в исходное положение.
Если амплитуда колебаний маятника приближается к числу π , это говорит о том, что движение на фазовой плоскости приближается к сепаратрисе. В этом случае под действием малой вынуждающей периодической силы механическая система проявляет хаотическое поведение.
При отклонении математического маятника от положения равновесия с некоторым углом φ возникает касательная силы тяжести Fτ = -mg sin φ. Знак «минус» означает, что эта касательная составляющая направляется в противоположную от отклонения маятника сторону. При обозначении через x смещения маятника по дуге окружности с радиусом L его угловое смещение равняется φ = x/L. Второй закон предназначенный для проекций и силы, даст искомое значение:
mg τ = Fτ = -mg sin x/L
Исходя из этого соотношения, видно, что этот маятник представляет собой нелинейную систему, поскольку сила, которая стремится вернуть его в положение равновесия, всегда пропорциональна не смещению x, а sin x/L.
Только тогда, когда математический маятник осуществляет малые колебания, он является гармоническим осциллятором. Иными словами, он становится механической системой, способной выполнять гармонические колебания. Такое приближение практически справедливо для углов в 15-20°. Колебания маятника с большими амплитудами не является гармоническим.
Закон Ньютона для малых колебаний маятника

Если данная механическая система выполняет малые колебания, 2-й закон Ньютона будет выглядеть таким образом:
mg τ = Fτ = -m* g/L* x.
Исходя из этого, можно заключить, что математического маятника пропорционально его смещению со знаком «минус». Это и является условием, благодаря которому система становится гармоническим осциллятором. Модуль коэффициента пропорциональности между смещением и ускорением равняется квадрату круговой частоты:
ω02 = g/L; ω0 = √ g/L.
Эта формула отражает собственную частоту малых колебаний этого вида маятника. Исходя из этого,
T = 2π/ ω0 = 2π√ g/L.
Вычисления на основе закона сохранения энергии
Свойства маятника можно описать и при помощи закона сохранения энергии. При этом следует учитывать, что маятника в поле тяжести равняется:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Полная равняется кинетической или максимальной потенциальной: Epmax = Ekmsx = E
После того как будет записан закон сохранения энергии, берут производную от правой и левой частей уравнения:
Поскольку производная от постоянных величин равняется 0, то (Ep + Ek)" = 0. Производная суммы равняется сумме производных:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/2*2v*v" = mv* α,
следовательно:
Mg/L*xv + mva = v (mg/L*x + m α) = 0.
Исходя из последней формулы находим: α = - g/L*x.
Практическое применение математического маятника
Ускорение изменяется с географической широтой, поскольку плотность земной коры по всей планете не одинакова. Там, где залегают породы с большей плотностью, оно будет несколько выше. Ускорение математического маятника нередко применяют для геологоразведки. В его помощью ищут различные полезные ископаемые. Просто подсчитав количество колебаний маятника, можно обнаружить в недрах Земли каменный уголь или руду. Это связано с тем, что такие ископаемые имеют плотность и массу больше, чем лежащие под ними рыхлые горные породы.

Математическим маятником пользовались такие выдающиеся ученые, как Сократ, Аристотель, Платон, Плутарх, Архимед. Многие из них верили в то, что эта механическая система может влиять на судьбу и жизнь человека. Архимед использовал математический маятник при своих вычислениях. В наше время многие оккультисты и экстрасенсы пользуются этой механической системой для осуществления своих пророчеств или поиска пропавших людей.

Известный французский астроном и естествоиспытатель К. Фламмарион для своих исследований также использовал математический маятник. Он утверждал, что с его помощью ему удалось предсказать открытие новой планеты, появление Тунгусского метеорита и другие важные события. Во время Второй мировой войны в Германии (г. Берлин) работал специализированный Институт маятника. В наши дни подобными исследованиями занят Мюнхенский институт парапсихологии. Свою работу с маятником сотрудники этого заведения называют «радиэстезией».
В качестве конкретного примера тела, вращающегося вокруг оси, рассмотрим движение маятников.
Физическим маятником называется твердое тело, обладающее горизонтальной осью вращения, вокруг которой оно совершает колебательные движения под действием своего веса (рис. 119).

Положение маятника полностью определяется углом его отклонения от положения равновесия, и поэтому для определения закона движения маятника достаточно найти зависимость этого угла от времени.
Уравнение вида:
называется уравнением (законом) движения маятника. Он зависит от начальных условий, т. е. от угла и угловой скорости Таким образом,
![]()
Предельным случаем физического Маятника является математический маятник, представляющий (как указывалось ранее - глава 2, § 3) материальную точку, соединенную с горизонтальной осью, вокруг которой она вращается, жестким невесомым стержнем (рис. 120). Расстояние материальной точки от оси вращения называется длиной математического маятника.
Уравнения движения физического и математического маятников
Выберем систему осей координат так, чтобы плоскость ху проходила через центр тяжести тела С и совпадала с плоскостью качания маятника, как это показано на чертеже (рис. 119). Ось направим перпендикулярно к плоскости чертежа на нас. Тогда на основании результатов предыдущего параграфа уравнение движения физического маятника запишем в виде:
где через обозначен момент инерции маятника относительно его оси вращения и
Поэтому можно написать:
![]()
Активной силой, действующей на маятник, является его вес момент которого относительно оси привеса будет:
![]()
где - расстояние от оси вращения маятника до его центра масс С.
Следовательно, приходим к следующему уравнению движения физического маятника:
![]()
Так как математический маятник является частным случаем физического, то записанное выше дифференциальное уравнение справедливо и для математического маятника. Если длина математического маятника равна а вес его то момент инерции его относительно оси вращения равен
Так как расстояние центра тяжести математического маятника от оси равно то окончательно дифференциальное уравнение движения математического маятника можно написать в виде:
![]()
Приведенная длина физического маятника
Сравнивая уравнения (16.8) и (16.9), можно заключить, что если параметры физического и математического маятников связаны соотношением
то законы движения физического и математического маятников одинаковы (при одинаковых начальных условиях).
Последнее соотношение указывает на ту длину, которую должен иметь математический маятник, чтобы двигаться так же, как соответствующий физический маятник. Эта длина называется приведенной длиной физического маятника. Смысл этого понятия заключается в том, что изучение движения физического маятника можно заменить изучением движения математического маятника, представляющего собой простейшую механическую схему.
Первый интеграл уравнения движения маятника
Уравнения движения физического и математического маятников имеют один и тот же вид, следовательно, уравнение их движения будет
![]()
![]()
Так как единственной силой, которая учитывается в этом уравнении, будет сила тяжести, принадлежащая потенциальному силовому полю, то имеет место закон сохранения механической энергии.
Последний можно получить простым приемом, именно умножим уравнение (16.10) на тогда
Интегрируя это уравнение, получим
![]()
Определяя постоянную интегрирования Си из начальных условий найдем
Решив последнее уравнение относительно получим
Это соотношение представляет собой первый интеграл дифференциального уравнения (16.10).
Определение опорных реакций физического и математического маятников
Первый интеграл уравнений движения позволяет определить опорные реакции маятников. Как указывалось в предыдущем параграфе, реакции опор определяются из уравнений (16.5). В случае физического маятника составляющие активной силы по осям координат и моменты ее относительно осей будут:

Координаты центра масс определяются формулами:
Тогда уравнения для определения реакций опор принимают вид:

Центробежные моменты инерции тела и расстояния между опорами должны быть известны по условиям задачи. Угловое ускорение в и угловая скорость со определяются из уравнений (16.9) и (16.4) в виде:

Таким образом, уравнения (16.12) полностью определяют составляющие опорных реакций физического маятника.
Уравнения (16.12) еще упрощаются, если рассматривать математический маятник. Действительно, так как материальная точка математического маятника расположена в плоскости то Кроме того, так как закреплена одна точка, то Следовательно, уравнения (16.12) обращаются в уравнения вида:
![]()

Из уравнений (16.13) с использованием уравнения (16.9) следует, что реакция опоры направлена вдоль нити I (рис. 120). Последнее представляет собой очевидный результат. Следовательно, проектируя составляющие равенств (16.13) на направление нити, найдем уравнение для определения реакции опоры вида (рис. 120):
Подставляя сюда значение и учитывая, что запишем:

Последнее соотношение определяет динамическую реакцию математического маятника. Заметим, что статическая реакция его будет
Качественное исследование характера движения маятника
Первый интеграл уравнения движеиия маятника позволяет провести качественное исследование характера движения его. Именно, запишем этот интеграл (16.11) в виде:
В процессе движения подкоренное выражение должно быть либо положительным, либо обращаться в некоторых точках в нуль. Допустим, что начальные условия таковы, что
![]()
В этом случае подкоренное выражение нигде не обращается в нуль. Следовательно, при движении маятник будет пробегать все значения угла и угловая скорость со маятника имеет один и тот же знак, который определяется направлением начальной угловой скорости, или угол будет либо все время возрастать, либо все время убывать, т. е. маятник будет вращаться в одну сторону.
Направления движения будут соответствовать тому или иному знаку в выражении (16.11). Необходимым условием реализации такого движения является наличие начальной угловой скорости, так как из неравенства (16.14) видно, что если то ни при каком начальном угле отклонения получить такое движение маятника невозможно.
Пусть теперь начальные условия таковы, что
![]()
В этом случае найдутся два таких значения угла при которых подкоренное выражение обращается в нуль. Пусть они соответствуют углам, определяемым равенством
Причем будет где-то в диапазоне изменения от 0 до . Далее, очевидно, что при
подкоренное выражение (16.11) будет положительным и при сколь угодно мало превышающем оно будет отрицательным.
Следовательно, при движении маятника его угол изменяется в диапазоне:
![]()
При угловая скорость маятника обращается в нуль и угол начинает уменьшаться до значения . При этом изменится знак угловой скорости или знак перед радикалом в выражении (16.11). Когда достигает значения угловая скорость маятника вновь обращается в нуль и угол опять начинает увеличиваться до значения
Таким образом, маятник будет совершать колебательные движения
Амплитуда колебаний маятника
При колебательных движениях маятника максимальная величина его отклонения от вертикали называется амплитудой колебания. Она равна которое определяется из равенства
![]()
Как следует из последней формулы, амплитуда колебания зависит от начальных данных основных характеристик маятника или его приведенной длины.
В частном случае, когда маятник отклонен от равновесного положения и отпущен без начальной скорости то будет равно , следовательно, амплитуда не зависит от приведенной длины.
Уравнение движения маятника в конечной форме
Пусть начальная скорость маятника равна нулю, тогда первый интеграл уравнения движения его будет:
Интегрируя это уравнение, находим
![]()
Будем вести отсчет времени от положения маятника, соответствующего тогда

Преобразуем подынтегральное выражение с помощью формулы:
![]()
Тогда получим:

Полученный интеграл называется эллиптическим интегралом первого рода. Он не может быть выражен с помощью конечного числа элементарных функций.
Обращение эллиптического интеграла (16.15) относительно его верхнего предела представляет уравнение движения маятника:
![]()
Это будет хорошо изученная эллиптическая функция Якоби.
Период колебания маятника
Время одного полного колебания маятника называется периодом его колебания. Обозначим его Т. Так как время движения маятника от положения до положения такое же, как время движения от то Т определится формулой:


Сделаем замену переменных, положив
![]()
При изменяющихся в пределах от 0 до будет меняться от 0 до . Далее,

и, следовательно,

Последний интеграл называется полным эллиптическим интегралом первого рода (значения его даются специальными таблицами).
При подынтегральная функция стремится к единице и .
Приближенные формулы малых колебаний маятника
В случае когда колебания маятника имеют небольшую амплитуду (практически не должно превышать 20°), можно положить
Тогда дифференциальное уравнение движения маятника преобретает вид:
![]()