หากวิถีการเคลื่อนที่ของจุดวัตถุเป็นเส้นโค้ง เราจะเรียกการเคลื่อนที่นั้นว่าเส้นโค้ง
ด้วยการเคลื่อนไหวนี้ การเปลี่ยนแปลงทั้งขนาดและทิศทาง ดังนั้นเมื่อ การเคลื่อนไหวโค้ง.
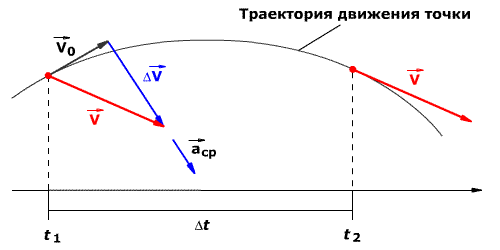
 ให้เราพิจารณาการเคลื่อนที่ของจุดวัตถุไปตาม วิถีโค้ง(รูปที่ 2.11) เวกเตอร์ความเร็วที่จุดใดๆ ของวิถีจะถูกส่งไปในแนวสัมผัสกับเวกเตอร์นั้น ให้ความเร็วอยู่ที่จุด M 0 และที่จุด M – . ในกรณีนี้เราเชื่อว่าช่วงเวลา Dt ในระหว่างการเปลี่ยนจากจุด M 0 ไปยังจุด M นั้นน้อยมากจนสามารถละเลยการเปลี่ยนแปลงความเร่งในขนาดและทิศทางได้
ให้เราพิจารณาการเคลื่อนที่ของจุดวัตถุไปตาม วิถีโค้ง(รูปที่ 2.11) เวกเตอร์ความเร็วที่จุดใดๆ ของวิถีจะถูกส่งไปในแนวสัมผัสกับเวกเตอร์นั้น ให้ความเร็วอยู่ที่จุด M 0 และที่จุด M – . ในกรณีนี้เราเชื่อว่าช่วงเวลา Dt ในระหว่างการเปลี่ยนจากจุด M 0 ไปยังจุด M นั้นน้อยมากจนสามารถละเลยการเปลี่ยนแปลงความเร่งในขนาดและทิศทางได้
 เวกเตอร์เปลี่ยนความเร็ว (ใน ในกรณีนี้ผลต่างของเวกเตอร์ 2 ตัวจะเท่ากับ ) ให้เราแยกย่อยเวกเตอร์ซึ่งแสดงลักษณะการเปลี่ยนแปลงความเร็วทั้งขนาดและทิศทางออกเป็นสององค์ประกอบและ ส่วนประกอบซึ่งสัมผัสกับวิถีที่จุด M 0 จะแสดงลักษณะของการเปลี่ยนแปลงความเร็วในช่วงเวลา Dt ในระหว่างที่ส่วนโค้ง M 0 M ถูกส่งผ่านและถูกเรียกว่า วงสัมผัสองค์ประกอบของเวกเตอร์การเปลี่ยนแปลงความเร็ว () เวกเตอร์ที่พุ่งไปในขีด จำกัด เมื่อ Dt ® 0 ตามรัศมีถึงศูนย์กลางจะแสดงลักษณะการเปลี่ยนแปลงความเร็วในทิศทางและเรียกว่าองค์ประกอบปกติของเวกเตอร์การเปลี่ยนแปลงความเร็ว ()
เวกเตอร์เปลี่ยนความเร็ว (ใน ในกรณีนี้ผลต่างของเวกเตอร์ 2 ตัวจะเท่ากับ ) ให้เราแยกย่อยเวกเตอร์ซึ่งแสดงลักษณะการเปลี่ยนแปลงความเร็วทั้งขนาดและทิศทางออกเป็นสององค์ประกอบและ ส่วนประกอบซึ่งสัมผัสกับวิถีที่จุด M 0 จะแสดงลักษณะของการเปลี่ยนแปลงความเร็วในช่วงเวลา Dt ในระหว่างที่ส่วนโค้ง M 0 M ถูกส่งผ่านและถูกเรียกว่า วงสัมผัสองค์ประกอบของเวกเตอร์การเปลี่ยนแปลงความเร็ว () เวกเตอร์ที่พุ่งไปในขีด จำกัด เมื่อ Dt ® 0 ตามรัศมีถึงศูนย์กลางจะแสดงลักษณะการเปลี่ยนแปลงความเร็วในทิศทางและเรียกว่าองค์ประกอบปกติของเวกเตอร์การเปลี่ยนแปลงความเร็ว ()
ดังนั้นเวกเตอร์การเปลี่ยนแปลงความเร็ว เท่ากับผลรวมเวกเตอร์สองตัว ![]() .
.
แล้วเราก็สามารถเขียนมันได้
ด้วยการลดลงอย่างไม่สิ้นสุดของ Dt®0 มุม Da ที่จุดยอด DM 0 AC จะมีแนวโน้มเป็นศูนย์ จากนั้นเวกเตอร์ก็สามารถละเลยไปเมื่อเปรียบเทียบกับเวกเตอร์และเวกเตอร์ได้
![]()
จะแสดงออกมา ความเร่งในวงสัมผัสและกำหนดลักษณะของความเร็วของการเปลี่ยนแปลงของความเร็วของการเคลื่อนที่ในขนาด ผลที่ตามมา ความเร่งในวงสัมผัสจะมีค่าเท่ากับตัวเลขอนุพันธ์ของโมดูลัสความเร็วเทียบกับเวลา และถูกกำหนดทิศทางในแนวสัมผัสไปยังวิถี
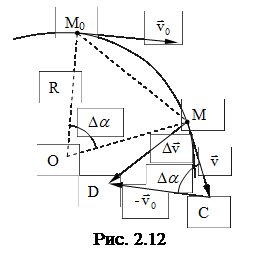
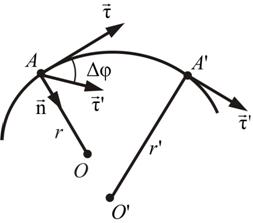
ให้เราคำนวณเวกเตอร์ที่เรียกว่า การเร่งความเร็วปกติ- ที่ Dt น้อยเพียงพอ ส่วนของวิถีโค้งถือเป็นส่วนหนึ่งของวงกลมได้ ในกรณีนี้ รัศมีของความโค้ง M 0 O และ MO จะเท่ากันและเท่ากับรัศมีของวงกลม R
มาวาดรูปซ้ำกัน ÐM 0 OM = ÐMSD เหมือนมุมที่มีด้านตั้งฉากกัน (รูปที่ 2.12) สำหรับ Dt ขนาดเล็ก เราสามารถพิจารณา |v 0 |=|v| ดังนั้น DM 0 OM = DMDC จึงคล้ายกันกับ สามเหลี่ยมหน้าจั่วกับ มุมเดียวกันที่ด้านบน.
ดังนั้นจากรูป 2.11 ดังต่อไปนี้
 Þ ,
Þ ,
แต่ DS = v เฉลี่ย ×Dt แล้ว .
ไปที่ขีด จำกัด ที่ Dt ® 0 และคำนึงว่าในกรณีนี้ v av = v เราพบ
 , เช่น. (2.5)
, เช่น. (2.5)
เพราะ ที่มุม Dt ® 0 Da ® 0 ดังนั้นทิศทางของการเร่งความเร็วนี้เกิดขึ้นพร้อมกับทิศทางของรัศมี R ของความโค้งหรือกับทิศทางของเส้นปกติกับความเร็วนั่นคือ เวกเตอร์ ดังนั้นความเร่งนี้จึงมักเรียกว่า สู่ศูนย์กลาง- เป็นลักษณะความเร็วของการเปลี่ยนแปลงความเร็วของการเคลื่อนที่ในทิศทาง
ความเร่งรวมถูกกำหนดโดยผลรวมเวกเตอร์ของความเร่งวงสัมผัสและความเร่งปกติ (รูปที่ 2.13) เพราะ เวกเตอร์ของความเร่งเหล่านี้ตั้งฉากกัน จากนั้นโมดูลของความเร่งรวมจะเท่ากับ  - ทิศทางของความเร่งรวมถูกกำหนดโดยมุม j ระหว่างเวกเตอร์กับ:
- ทิศทางของความเร่งรวมถูกกำหนดโดยมุม j ระหว่างเวกเตอร์กับ:
จลนศาสตร์ของการเคลื่อนที่แบบหมุน
ความเร็วเชิงมุม.
คำนิยาม: การเคลื่อนไหวแบบหมุนเราจะเรียกการเคลื่อนไหวดังกล่าวว่าจุดทุกจุดเป็นที่แน่นอน แข็งอธิบายวงกลมที่มีจุดศูนย์กลางอยู่บนเส้นตรงเดียวกันเรียกว่าแกนหมุน
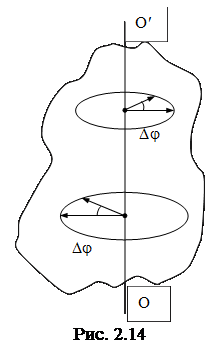 ในฐานะที่เป็นพิกัดที่กำหนดตำแหน่งของจุดระหว่างการเคลื่อนที่แบบหมุน ให้ใช้มุมที่กำหนดลักษณะตำแหน่งทันทีของเวกเตอร์รัศมีที่ดึงจากจุดศูนย์กลางการหมุนไปยังจุดที่ต้องการ (รูปที่ 2.14)
ในฐานะที่เป็นพิกัดที่กำหนดตำแหน่งของจุดระหว่างการเคลื่อนที่แบบหมุน ให้ใช้มุมที่กำหนดลักษณะตำแหน่งทันทีของเวกเตอร์รัศมีที่ดึงจากจุดศูนย์กลางการหมุนไปยังจุดที่ต้องการ (รูปที่ 2.14)
เพื่อระบุลักษณะการเคลื่อนที่แบบหมุน จึงมีการนำแนวคิดนี้มาใช้ ความเร็วเชิงมุม
เวกเตอร์ถูกกำหนดทิศทางไปตามแกนที่ร่างกายหมุนไปในทิศทางที่กำหนด กฎสกรูขวา(รูปที่ 2.15)
ขนาดของเวกเตอร์ความเร็วเชิงมุมเท่ากับ ถ้า = const การเคลื่อนไหวดังกล่าวเรียกว่าสม่ำเสมอ ดังนั้นที่ t 0 = 0 เราจึงได้
ถ้า เจ 0 = 0 แล้ว เจ = w เสื้อหรือ .
ดังนั้นด้วยการเคลื่อนไหวที่สม่ำเสมอ วแสดงมุมที่ร่างกายหมุนต่อหน่วยเวลา มิติของความเร็วเชิงมุม [ ว]=ราด/วินาที
การหมุนสม่ำเสมอสามารถแสดงลักษณะเฉพาะได้ด้วยคาบการหมุน T ซึ่งเข้าใจกันว่าเป็นเวลาที่ร่างกายสร้างขึ้น เลี้ยวเต็ม, เช่น. หมุนเป็นมุม 2p ในกรณีนี้ ดังนั้น.
ความถี่ในการหมุน (จำนวนรอบต่อหน่วยเวลา): n=1/T=w/2p ดังนั้น w=2pn
ภาคผนวก 1
การหมุนของร่างกายผ่านดีเจมุมเล็ก ๆ สามารถระบุได้ในรูปแบบของเซกเมนต์ซึ่งมีความยาวเท่ากับ dj และทิศทางเกิดขึ้นพร้อมกับแกนรอบ ๆ ที่ทำการหมุน ดังนั้นการหมุนของร่างกายจึงสามารถนำมาประกอบเป็นบางส่วนได้ ค่าตัวเลขและทิศทาง ในกรณีนี้ ทิศทางของเวกเตอร์สามารถกำหนดได้โดยสัมพันธ์กับทิศทางการหมุนของวัตถุ เวกเตอร์ดังกล่าวเรียกว่า ตามแนวแกนหรือ pseudovectors ซึ่งตรงข้ามกับ true หรือ ขั้วโลกเวกเตอร์ที่กำหนดทิศทางตามธรรมชาติ ( , , ฯลฯ ) ในระหว่างการดำเนินการผกผันของระบบพิกัด (x → -x', y → -y', z → -z') เวกเตอร์หลังจะเปลี่ยนเครื่องหมายเป็น ตรงข้าม: .
เวกเตอร์ความเร็วเชิงมุมสามารถเปลี่ยนแปลงได้ทั้งเนื่องจากการเปลี่ยนแปลงความเร็วในการหมุนของร่างกายรอบแกน (ในกรณีนี้จะเปลี่ยนขนาด) และเนื่องจากการหมุนของแกนของการหมุนในอวกาศ (ในกรณีนี้จะเปลี่ยนใน ทิศทาง). เพื่อกำหนดลักษณะอัตราการเปลี่ยนแปลงจึงเรียกว่าปริมาณทางกายภาพ ความเร่งเชิงมุม.
คำนิยาม: ความเร่งเชิงมุมเฉลี่ยเรียกว่าปริมาณ โดยที่ Dt คือช่วงเวลาที่ความเร็วเชิงมุมเปลี่ยนแปลงไป
คำนิยาม: การเร่งความเร็วทันทีเรียกว่าปริมาณเท่ากับ ;
หากทิศทางของแกนการหมุนในอวกาศคงที่ ความเร็วเชิงมุมจะเปลี่ยนตามขนาดเท่านั้น และในกรณีนี้  .
.
หากโดย e เราหมายถึงเส้นโครงของเวกเตอร์ไปยังทิศทาง สูตรสุดท้ายจะอยู่ในรูปแบบ ![]() - โดยที่ e คือปริมาณเชิงพีชคณิตและ
- โดยที่ e คือปริมาณเชิงพีชคณิตและ
ถ้า w แล้ว e>0 (เวกเตอร์และทิศทางเดียว)
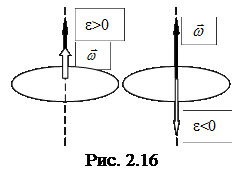 ถ้า w  แล้ว e<0 ( ¯ ).
ถ้า w  แล้ว e<0 ( ¯ ).
1) ถ้า จ>0 Þ การหมุนมีความเร่งสม่ำเสมอ ( ) (รูปที่ 2.16)
2) ถ้าจ<0 – ( ¯ ) (рис. 2.16).
ในระบบ SI [e] = rad/s 2
สำหรับการเคลื่อนที่ด้วยความเร่งสม่ำเสมอ:
เพราะฉะนั้น, w = w 0 + อี (เสื้อ - เสื้อ 0)- ที่ ที 0 = 0 เราได้ w = w 0 + e·t.
ในที่สุด
ตอนนี้เรามาติดตั้งกัน
การเคลื่อนที่ของจุดยังมีลักษณะเฉพาะคือการเร่งความเร็ว ซึ่งเป็นอัตราการเปลี่ยนแปลงความเร็ว หากความเร็วของจุดเปลี่ยนแปลงตามค่าในช่วงเวลาใดก็ได้ ค่านั้นก็จะเปลี่ยนไป
เรียกว่าความเร่งเฉลี่ยของจุดในช่วงเวลานี้ อัตราเร่งเข้า. ช่วงเวลานี้เวลา:
เหล่านั้น. เวกเตอร์เท่ากับอนุพันธ์ของเวลา ทิศทางของเวกเตอร์เกิดขึ้นพร้อมกับทิศทางของความเร็วที่เพิ่มขึ้นสำหรับ เนื่องจาก , ความเร่งของจุดสามารถเขียนเป็นอนุพันธ์อันดับสองเทียบกับเวลาของเวกเตอร์รัศมี:
เวกเตอร์ความเร่งสามารถขยายออกเป็นส่วนประกอบได้: ![]() - ที่ไหน
- ที่ไหน ![]() ตามลำดับ ...การฉายความเร่งบนแกนพิกัด
ตามลำดับ ...การฉายความเร่งบนแกนพิกัด
หากวิถีของจุดหนึ่งเป็นเส้นโค้งแบน เพื่ออธิบายการเคลื่อนไหว คุณสามารถเลือกสองทิศทางที่ตั้งฉากกัน: แทนเจนต์กับวิถี (ort) และเส้นปกติ (ort) จากนั้นจึงสลายตัวเป็นส่วนประกอบ
เนื่องจากเวกเตอร์ความเร็ว จากนั้นจึงแทนที่การกระจัดเบื้องต้นที่นี่ ![]() เราได้รับความเร็ว: .
เราได้รับความเร็ว: .
จากนั้นเพื่อเร่งจุดที่เราสามารถเขียนได้:
![]() ;
;
จากรูป เห็นได้ชัดว่ามีความแตกต่างระหว่างเวกเตอร์และ จะเห็นได้ว่ามีการเพิ่มขึ้นในเวกเตอร์หน่วยของแทนเจนต์กับวิถีซึ่งสอดคล้องกับเส้นทางเบื้องต้นในเวลา .

| |
เมื่อเคลื่อนที่ไปตามเส้นทางตามความยาว เวกเตอร์หน่วยจะหมุนเป็นมุม จากสามเหลี่ยมหน้าจั่วของเวกเตอร์ ![]() เนื่องจากมีขนาดเล็ก
เนื่องจากมีขนาดเล็ก
ทิศทางเกิดขึ้นพร้อมกับเวกเตอร์หน่วย: เมื่อเวกเตอร์ตั้งฉาก จากนั้นอนุพันธ์:
และความเร่งเต็มพิกัด
จากนี้จะเห็นได้ว่าความเร่งในวงสัมผัส (วงสัมผัส) เป็นตัวกำหนดลักษณะอัตราการเปลี่ยนแปลงของโมดูลัสความเร็ว มีการเคลื่อนไหวด้วยความเร่งและเกิดขึ้นพร้อมๆ กัน ด้วยการเคลื่อนไหวช้าๆ และตรงกันข้าม
ความเร่งปกติแสดงถึงความเร็วของการเปลี่ยนแปลงในทิศทางของเวกเตอร์ความเร็ว พุ่งตรงไปยังจุดศูนย์กลางความโค้งของวิถี - ดังนั้นจึงเรียกว่าศูนย์กลางศูนย์กลาง เมื่อเคลื่อนที่เป็นเส้นตรง
โมดูลเร่งความเร็วเต็ม
ในระหว่างการเคลื่อนที่ด้วยความเร่ง มุมจะเป็นแบบเฉียบพลัน ดังรูป , ในการเคลื่อนไหวช้า - ป้าน (มุมระหว่าง และ ) หากจุดหนึ่งเคลื่อนที่รอบวงกลมสม่ำเสมอ นั่นคือ จากนั้น และ เช่น ตั้งฉากกับเส้นสัมผัสของวิถี
พลวัตของการเคลื่อนที่เชิงแปล
การเคลื่อนไหวไปข้างหน้า
การเคลื่อนที่ทางกลที่ง่ายที่สุดของวัตถุแข็งเกร็งคือการเคลื่อนที่แบบทรานสเลชัน ซึ่งเส้นตรงที่เชื่อมจุดสองจุดใดๆ ของร่างกายจะเคลื่อนที่ไปพร้อมกับลำตัว โดยยังคงขนานกัน | ไปยังตำแหน่งเดิม (ลูกบอลบนสปริงที่สัมพันธ์กับโลก, ลูกสูบในกระบอกสูบเครื่องยนต์ที่อยู่กับที่, ลิฟต์, เครื่องตัดเครื่องกลึง ฯลฯ ) วิถีทุกจุดของร่างกายเหมือนกัน รัศมี - เวกเตอร์ของจุดทั้งหมดของร่างกายเปลี่ยนแปลงด้วยระยะเวลาเท่ากัน ความเร็วของจุดทั้งหมดและความเร่งเท่ากัน:
; ![]()
เหล่านั้น. เพื่ออธิบายการเคลื่อนไหว คุณสามารถใช้จุดเดียวของร่างกายได้ ถ้าในเวลาเดียวกัน เมื่ออินทิเกรตเราจะพบความเร็วของจุด:
- จากนั้นเมื่อรวมความเร็วเข้าด้วยกันเราจะพบพิกัด:
กฎความเฉื่อย
กลศาสตร์คลาสสิกมีพื้นฐานมาจากกฎสามข้อของนิวตัน ซึ่งกำหนดโดยเขาในบทความเรื่อง “หลักการทางคณิตศาสตร์ของปรัชญาธรรมชาติ” ซึ่งตีพิมพ์ในปี 1687 กฎเหล่านี้เป็นผลมาจากการสรุปข้อมูลการทดลองและกฎทางทฤษฎีที่ยอดเยี่ยมในสาขากลศาสตร์ ซึ่งก่อตั้งโดยนิวตันและเคปเลอร์ กาลิเลโอ, ไฮเกนส์. กุ๊ก และคณะ
ในฐานะที่เป็นกฎข้อแรกของพลวัต นิวตันได้นำกฎที่กาลิเลโอกำหนดไว้มาใช้:
ทุกร่างกายรักษาสภาวะการพักผ่อนหรือสม่ำเสมอ การเคลื่อนไหวเป็นเส้นตรงจนกว่าอิทธิพลภายนอกจะบังคับให้สภาวะนี้เปลี่ยนแปลงไป
กฎหมายฉบับนี้ระบุว่าสำหรับสภาวะนิ่งหรือการเคลื่อนที่เชิงเส้นสม่ำเสมอนั้นไม่จำเป็น อิทธิพลภายนอก- สิ่งนี้เผยให้เห็นคุณสมบัติไดนามิกพิเศษของวัตถุที่เรียกว่า ความเฉื่อย ดังนั้นกฎข้อแรกของนิวตันจึงเรียกว่ากฎความเฉื่อย และการเคลื่อนไหวของวัตถุโดยไม่มีอิทธิพลภายนอกเรียกว่าการเคลื่อนที่โดยความเฉื่อย
ในการกำหนดกฎหมายนี้ถือว่าร่างกายไม่ได้มีรูปร่างผิดปกติเช่น มันมั่นคงอย่างแน่นอน และมันเคลื่อนไปข้างหน้า อย่างไรก็ตาม วัตถุแข็งเกร็งยังสามารถหมุนได้สม่ำเสมอตามความเฉื่อย ในขณะที่มีการเร่งความเร็ว ความจำเป็นในการจองทั้งหมดนี้จะหายไปหากในกฎข้อแรกของนิวตัน เราไม่ได้พูดถึงวัตถุ แต่เกี่ยวกับจุดวัตถุ ซึ่งตามคำจำกัดความแล้ว ไม่สามารถเปลี่ยนรูปหรือหมุนได้
ดังนั้นสำหรับจุดวัสดุจึงใช้สูตรต่อไปนี้:
จุดวัสดุรักษาสถานะของการพักผ่อนหรือการเคลื่อนไหวเป็นเส้นตรงสม่ำเสมอจนกว่าอิทธิพลภายนอกจะพามันออกจากสถานะนี้
มิติของพื้นที่
มิติข้อมูลหมายถึงจำนวนการวัดที่ควรดำเนินการเพื่อระบุตำแหน่งของจุดใดจุดหนึ่งอย่างไม่คลุมเครือ ดังนั้น เพื่อที่จะระบุตำแหน่งของจุดในอวกาศในช่วงเวลาคงที่ได้อย่างไม่คลุมเครือ จำเป็นต้องระบุพิกัดทั้งสามของมันอย่างเพียงพอและเพียงพอ ในระบบพิกัดคาร์ทีเซียนสี่เหลี่ยมที่พบมากที่สุดคือสิ่งนี้ x, y, z -ความยาวความกว้างและความสูง (รูปที่ 5.2, α); ในระบบพิกัดทรงกลม คุณต้องระบุเวกเตอร์รัศมี รและมุม α และ β (รูปที่ 5.2, ข);ในระบบทรงกระบอก - ความสูง ชม,เวกเตอร์รัศมี รและมุม α (รูปที่ 5.2, วี)
เชื่อกันว่ากระบวนการทางวัตถุและปฏิสัมพันธ์ทั้งหมดเกิดขึ้นได้อย่างแม่นยำในพื้นที่สามมิติ ในปริภูมิมิติเดียว (เส้น) หรือสองมิติ (ระนาบ) ปฏิสัมพันธ์ของอนุภาคและสนามไม่สามารถเกิดขึ้นได้ สามมิติเป็นขั้นต่ำที่จำเป็นและเพียงพอซึ่งการโต้ตอบของวัตถุวัสดุทุกประเภทสามารถเกิดขึ้นได้
ขณะนี้ยังไม่มีรูปแบบการเคลื่อนไหวและปฏิสัมพันธ์ที่ทราบซึ่งต้องใช้พื้นที่สี่หรือห้ามิติ และความเป็นไปได้ของกระบวนการดังกล่าวไม่ได้เป็นไปตามกฎธรรมชาติที่กำหนดไว้ใดๆ
มีการอภิปรายบ่อยครั้งในวรรณคดีเกี่ยวกับความเป็นไปได้ของการดำรงอยู่ของช่องว่างในมิติที่มากขึ้น ดังนั้นเมื่อเร็ว ๆ นี้ได้มีการหยิบยกสมมติฐานเกี่ยวกับมิติจริง 11 มิติในโลกไมโครในช่วงเวลาแรกของการกำเนิดจักรวาลของเรา: 10 - เชิงพื้นที่และพร้อมกัน; จากนั้นพวกมันก็ก่อตัวเป็นความต่อเนื่องของกาล-อวกาศ 4 มิติ สมมติฐานนี้เกี่ยวข้องกับสถานการณ์ต่อไปนี้ ในทางคณิตศาสตร์และฟิสิกส์ แนวคิดเรื่องหลายมิติ ( n-มิติ) ช่องว่าง นามธรรมทางคณิตศาสตร์นี้มีบทบาทสำคัญ แต่ละพิกัดของปริภูมิหลายมิติสามารถระบุคุณสมบัติของความเป็นจริงทางกายภาพที่กำลังพิจารณา เช่น อุณหภูมิ ความหนาแน่น ความเร็ว มวล ฯลฯ ถ้าจำนวนพารามิเตอร์ดังกล่าวพร้อมกับลักษณะอวกาศ-เวลามีค่าเท่ากับ พีจากนั้นจะถือว่าสร้างพื้นที่ "-มิติ" และค่าเฉพาะของคุณสมบัติถูกกำหนดให้เป็นจุดใน "-ช่องว่างมิติ" ด้วยคุณสมบัติจำนวนมากเพียงพอและตัวแปรที่สัมพันธ์กัน เราจึงสามารถเข้าใจแนวคิดเรื่องปริภูมิหลายมิติและแม้กระทั่งขนาดอนันต์ได้ อย่างไรก็ตาม แนวคิดเรื่องพื้นที่ที่นี่มีลักษณะตามเงื่อนไข เนื่องจากใช้เพื่อระบุคุณสมบัติที่แตกต่างไปจากเดิมอย่างสิ้นเชิง
มิติของเวลา
สำหรับมิติของเวลา ส่วนใหญ่มักจะชี้ไปที่ความเป็นมิติเดียวของมัน: เพื่อกำหนดเวลา ก็เพียงพอที่จะระบุพิกัดเดียว ตามที่ S.T. Melyukhina หากเวลาไม่มีมิติเดียว แต่มีสองสามมิติหรือมากกว่านั้นก็หมายความว่าโลกคู่ขนานของเรามีความคล้ายคลึงกันและไม่มีทางเชื่อมโยงกับโลกแฝดของเราซึ่งมีเหตุการณ์เดียวกันเกิดขึ้นในลำดับเดียวกัน ดังนั้นแต่ละคนจะต้องมีคู่ในโลกคู่ขนานแต่ละใบ แต่ไม่มีพื้นฐานสำหรับสมมติฐานดังกล่าว
มุมมองที่แตกต่างถูกแบ่งปันโดยนักภูมิศาสตร์ชาวรัสเซีย Yu.G. ไซมอนอฟ. เขาเชื่อว่าค่อนข้างเป็นไปได้ที่จะเสนอแบบจำลองเวลาสองมิติที่มีประโยชน์สำหรับการอธิบายและศึกษาเหตุการณ์บางประเภท และตรวจสอบโดยใช้ตัวอย่างของปรากฏการณ์ทางภูมิศาสตร์บางอย่าง ที่นี่เราควรจำเวลาสองประเภท - สุริยคติและดวงจันทร์ เหตุการณ์ต่างๆ สามารถเชื่อมโยงกับระยะของปฏิทินจันทรคติและสุริยคติได้ เป็นที่ทราบกันดีว่าเวกเตอร์เวลาเหล่านี้มีความเป็นอิสระและอยู่นอกเฟส และคาบของเวกเตอร์ไม่คูณกัน ดังนั้นโดยการศึกษาปรากฏการณ์บนโลกเราสามารถพบสิ่งที่เกี่ยวข้องกับสนามโน้มถ่วงโลก - ดวงจันทร์และโลก - ดวงอาทิตย์เท่านั้น ฟิลด์เหล่านี้สามารถทับซ้อนกัน บางครั้งเพิ่มขึ้น หรือบางครั้งก็ลบ ในกรณีนี้ เราสามารถพูดถึงการศึกษาระบบแรงโน้มถ่วงของวัตถุทั้งสามได้ ในระบบดังกล่าว จำนวนเวกเตอร์เวลาจะสอดคล้องกับจำนวนระดับความเป็นอิสระ ปล่อยให้แกนอยู่ในปริภูมิของเวกเตอร์สองตัว เอ็กซ์เกิดขึ้นพร้อมกับเวกเตอร์เวลาสุริยะและแกน คุณ -กับดวงจันทร์ ในช่วงข้างขึ้นข้างแรมใหม่ แรงดึงดูดทางจันทรคติและแสงอาทิตย์จะถูกเพิ่มเข้ามา และในช่วงข้างขึ้นข้างแรม แรงดึงดูดเหล่านั้นจะถูกลบออก ดังนั้นในระหว่างข้างขึ้นข้างแรมใหม่ โลกและดวงอาทิตย์จะพบกับความโน้มถ่วงรบกวนสูงสุด และในระหว่างข้างขึ้นข้างแรม ดวงจันทร์และดวงอาทิตย์จะพบกับความโน้มถ่วงรบกวนสูงสุด ความเข้มแรงโน้มถ่วงต่ำสุดของโลกจะเกิดขึ้นที่พระจันทร์เต็มดวง เมื่อสนามแรงโน้มถ่วงถูกลบออก ดังนั้น บนโลก ความตึงเครียดจากแรงโน้มถ่วงจะเพิ่มขึ้นตั้งแต่พระจันทร์เต็มดวงจนถึงพระจันทร์ดวงใหม่ จากนั้นจึงลดลง เมื่อคลื่นความโน้มถ่วงเพิ่มขึ้น ผลกระทบบางอย่างจะเกิดขึ้น และเมื่อความตึงเครียดลดลง (บรรเทา) ผลกระทบอื่นๆ ก็จะเกิดขึ้น ดังนั้นรอยแตกของเปลือกโลกจึงบีบอัดและขยายตัวในระยะต่างๆ กระบวนการที่เกี่ยวข้องกับแรงดันรอยแยกของน้ำใต้ดินเกิดขึ้นโดยมีจุดแข็งต่างกัน เป็นต้น
ในกรณีทั่วไป ตามที่ Simonov กล่าว ไม่สามารถมีเวกเตอร์เวลาได้สองแบบ แต่จะมีมากกว่านั้น การเลือกแบบจำลองเวลาหลายมิติ (โดยเฉพาะอย่างยิ่ง การกำหนดจำนวนเวกเตอร์ของเวลา) สามารถดำเนินการได้ค่อนข้างง่ายในกรณีที่กระบวนการที่กำลังศึกษามีความเป็นอิสระจากกันเชิงสาเหตุ และสามารถจินตนาการได้ว่าเป็นการแสดงออกมาเป็นวัฏจักร และวัฏจักร ไม่อาจอยู่ได้เป็นชั่วโมงหรือเป็นวัน แต่สามารถคงอยู่ได้เป็นปี ศตวรรษ และแม้กระทั่งนับพันปี
การเร่งความเร็ว
การเร่งความเร็วคือปริมาณที่แสดงลักษณะอัตราการเปลี่ยนแปลงความเร็ว
ตัวอย่างเช่น เมื่อรถยนต์เริ่มเคลื่อนที่ มันจะเพิ่มความเร็ว กล่าวคือ เคลื่อนที่เร็วขึ้น ในตอนแรกความเร็วจะเป็นศูนย์ เมื่อเคลื่อนที่แล้ว รถจะค่อยๆ เร่งความเร็วจนถึงระดับหนึ่ง ถ้าไฟแดงมารถจะหยุด แต่จะไม่หยุดทันที แต่เมื่อเวลาผ่านไป นั่นคือความเร็วจะลดลงเหลือศูนย์ - รถจะเคลื่อนที่ช้าๆ จนกระทั่งหยุดสนิท อย่างไรก็ตาม ในฟิสิกส์ไม่มีคำว่า "ชะลอตัว" หากร่างกายเคลื่อนที่ช้าลง นี่จะเป็นความเร่งของร่างกายด้วยโดยมีเครื่องหมายลบเท่านั้น (ดังที่คุณจำได้ ความเร็ว
- นี้ ปริมาณเวกเตอร์).
อัตราเร่งเฉลี่ย
ความเร่งเฉลี่ยคืออัตราส่วนของการเปลี่ยนแปลงความเร็วต่อช่วงเวลาที่การเปลี่ยนแปลงนี้เกิดขึ้น สูตรความเร่งเฉลี่ยสามารถกำหนดได้:
ที่ไหน - เวกเตอร์การเร่งความเร็ว.
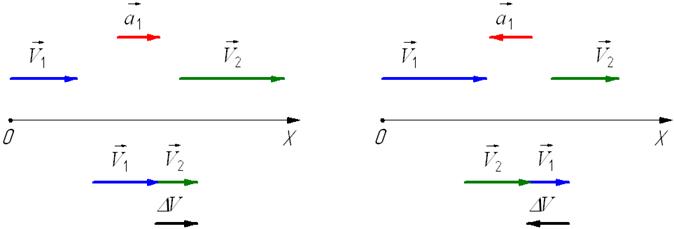
ทิศทางของเวกเตอร์ความเร่งเกิดขึ้นพร้อมกับทิศทางของการเปลี่ยนแปลงความเร็ว Δ = - 0 (ในที่นี้คือ 0 ความเร็วเริ่มต้นนั่นคือความเร็วที่ร่างกายเริ่มเร่งความเร็ว)
ณ เวลา t1 (ดูรูปที่ 1.8) ร่างกายมีความเร็วเป็น 0 ณ เวลา t2 ร่างกายมีความเร็ว ตามกฎของการลบเวกเตอร์ เราจะพบเวกเตอร์ของการเปลี่ยนแปลงความเร็ว Δ = - 0 จากนั้นคุณสามารถกำหนดความเร่งได้ดังนี้:
ข้าว. 1.8. อัตราเร่งเฉลี่ย
ในเอสไอ หน่วยเร่งความเร็ว– คือ 1 เมตรต่อวินาทีต่อวินาที (หรือเมตรต่อวินาทียกกำลังสอง) กล่าวคือ
เมตรต่อวินาทียกกำลังสอง เท่ากับความเร่งจุดที่เคลื่อนที่เป็นเส้นตรง โดยใน 1 วินาที ความเร็วของจุดนี้จะเพิ่มขึ้น 1 m/s กล่าวอีกนัยหนึ่ง ความเร่งจะกำหนดความเร็วของร่างกายที่เปลี่ยนแปลงไปในหนึ่งวินาที ตัวอย่างเช่น หากความเร่งคือ 5 m/s2 นั่นหมายความว่าความเร็วของร่างกายเพิ่มขึ้น 5 m/s ทุกๆ วินาที
ความเร่งทันทีของร่างกาย (จุดวัสดุ) ในช่วงเวลาที่กำหนดคือปริมาณทางกายภาพ เท่ากับขีดจำกัดซึ่งความเร่งเฉลี่ยมีแนวโน้มตามช่วงเวลามีแนวโน้มเป็นศูนย์ กล่าวอีกนัยหนึ่ง นี่คือความเร่งที่ร่างกายพัฒนาขึ้นในช่วงเวลาอันสั้นมาก:
ทิศทางความเร่งยังเกิดขึ้นพร้อมกับทิศทางการเปลี่ยนแปลงของความเร็ว Δ สำหรับค่าที่น้อยมากของช่วงเวลาที่เกิดการเปลี่ยนแปลงความเร็ว เวกเตอร์ความเร่งสามารถระบุได้โดยการฉายภาพลงบนแกนพิกัดที่สอดคล้องกันในระบบอ้างอิงที่กำหนด (การฉายภาพ X, Y, a Z)
ด้วยการเคลื่อนที่เชิงเส้นแบบเร่ง ความเร็วของร่างกายจะเพิ่มขึ้นตามค่าสัมบูรณ์ กล่าวคือ
วี 2 > วี 1
และทิศทางของเวกเตอร์ความเร่งเกิดขึ้นพร้อมกับเวกเตอร์ความเร็ว 2
หากความเร็วของร่างกายลดลงตามค่าสัมบูรณ์ นั่นก็คือ
วี 2< v 1
จากนั้นทิศทางของเวกเตอร์ความเร่งจะตรงข้ามกับทิศทางของเวกเตอร์ความเร็ว 2 กล่าวอีกนัยหนึ่ง ในกรณีนี้สิ่งที่เกิดขึ้นคือ ช้าลงในกรณีนี้ ความเร่งจะเป็นลบ (และ< 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
ข้าว. 1.9. การเร่งความเร็วทันที
เมื่อเคลื่อนที่ไปตามเส้นทางโค้ง ไม่เพียงแต่โมดูลความเร็วจะเปลี่ยนไป แต่ยังเปลี่ยนทิศทางด้วย ในกรณีนี้ เวกเตอร์ความเร่งจะแสดงเป็นสององค์ประกอบ (ดูหัวข้อถัดไป)
ความเร่งในวงสัมผัส
ความเร่งในวงโคจร (วงโคจร) เป็นองค์ประกอบของเวกเตอร์ความเร่งที่พุ่งไปตามเส้นสัมผัสของวิถีการเคลื่อนที่ ณ จุดที่กำหนดของวิถีการเคลื่อนที่ ความเร่งในวงโคจรแสดงลักษณะการเปลี่ยนแปลงของโมดูโลความเร็วระหว่างการเคลื่อนที่แนวโค้ง
ข้าว. 1.10. ความเร่งในวงสัมผัส
ทิศทางของเวกเตอร์ความเร่งวงโคจร τ (ดูรูปที่ 1.10) เกิดขึ้นพร้อมกับทิศทางของความเร็วเชิงเส้นหรืออยู่ตรงข้ามกับทิศทางนั้น นั่นคือเวกเตอร์ความเร่งในวงโคจรอยู่บนแกนเดียวกันกับวงกลมแทนเจนต์ซึ่งเป็นวิถีการเคลื่อนที่ของวัตถุ
อัตราเร่งปกติ
ความเร่งปกติเป็นส่วนประกอบของเวกเตอร์ความเร่งที่พุ่งไปตามเส้นปกติไปยังวิถีการเคลื่อนที่ ณ จุดที่กำหนดบนวิถีการเคลื่อนที่ของร่างกาย นั่นคือเวกเตอร์ความเร่งปกติจะตั้งฉากกับความเร็วเชิงเส้นของการเคลื่อนที่ (ดูรูปที่ 1.10) ความเร่งปกติแสดงลักษณะการเปลี่ยนแปลงความเร็วในทิศทางและเขียนแทนด้วยตัวอักษร n เวกเตอร์ความเร่งปกติจะพุ่งไปตามรัศมีความโค้งของวิถี
อัตราเร่งเต็มที่
ความเร่งรวมระหว่างการเคลื่อนที่เชิงโค้งคือผลรวมของความเร่งในแนวสัมผัสและความเร่งปกติ กฎการบวกเวกเตอร์ และถูกกำหนดโดยสูตร:
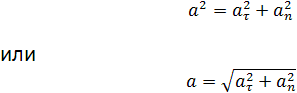
(ตามทฤษฎีบทพีทาโกรัสสำหรับรูปสี่เหลี่ยมผืนผ้า)
ทิศทางของการเร่งความเร็วรวมก็ถูกกำหนดด้วย กฎการบวกเวกเตอร์ : = τ + n
ความเร่งในวงสัมผัส (วงสัมผัส) เป็นส่วนประกอบของเวกเตอร์ความเร่งที่พุ่งไปตามเส้นสัมผัสของวิถีการเคลื่อนที่ ณ จุดที่กำหนดของวิถีการเคลื่อนที่ ความเร่งในวงโคจรแสดงลักษณะการเปลี่ยนแปลงของโมดูโลความเร็วระหว่างการเคลื่อนที่แนวโค้ง
ทิศทางเวกเตอร์ความเร่งวงโคจร กอยู่บนแกนเดียวกันกับวงกลมแทนเจนต์ซึ่งเป็นวิถีลำตัว
อัตราเร่งปกติ- นี่คือองค์ประกอบของเวกเตอร์ความเร่งที่พุ่งไปตามเส้นปกติไปยังวิถีการเคลื่อนที่ ณ จุดที่กำหนดบนวิถีการเคลื่อนที่ของร่างกาย
 เวกเตอร์
ตั้งฉากกับความเร็วเชิงเส้นของการเคลื่อนที่ซึ่งพุ่งไปตามรัศมีความโค้งของวิถี
เวกเตอร์
ตั้งฉากกับความเร็วเชิงเส้นของการเคลื่อนที่ซึ่งพุ่งไปตามรัศมีความโค้งของวิถี
สูตรความเร็วเพื่อการเคลื่อนไหวที่มีความเร่งสม่ำเสมอ
ก้าวหน้าและ การเคลื่อนไหวแบบหมุนร่างกายที่มั่นคง
การเคลื่อนไหวไปข้างหน้า
- การเคลื่อนไหวที่ทุกจุดของร่างกายเคลื่อนที่ไปในวิถีเดียวกัน
การเคลื่อนที่ไปข้างหน้ามีสองประเภท: สม่ำเสมอและไม่สม่ำเสมอ
การเคลื่อนไหวแบบหมุน คือการเคลื่อนที่ของวัตถุรอบแกนใดแกนหนึ่ง ด้วยการเคลื่อนไหวดังกล่าว ทุกจุดของร่างกายจะเคลื่อนที่เป็นวงกลม โดยศูนย์กลางคือแกนนี้
ความเร็วเชิงมุม. ความเร่งเชิงมุม .
ความเร็วเชิงมุม - ปริมาณเวกเตอร์ ซึ่งเป็นปริมาณเวกเตอร์เทียม (เวกเตอร์ตามแนวแกน) และแสดงลักษณะความเร็วของการหมุนของจุดวัสดุรอบจุดศูนย์กลางการหมุน เวกเตอร์ความเร็วเชิงมุมในขนาด เท่ากับมุมการหมุนของจุดรอบจุดศูนย์กลางการหมุนต่อหน่วยเวลา:
![]()
ความเร่งเชิงมุม - ปริมาณทางกายภาพหลอกเวกเตอร์เท่ากับอนุพันธ์อันดับหนึ่งของเวกเตอร์หลอกของความเร็วเชิงมุมเทียบกับเวลา
ความเร่งเชิงมุมแสดงลักษณะความรุนแรงของการเปลี่ยนแปลงในโมดูลและทิศทางของความเร็วเชิงมุมระหว่างการเคลื่อนที่ของวัตถุแข็งเกร็ง
![]()
ความสัมพันธ์ระหว่างความเร็วเชิงเส้นกับความเร็วเชิงมุมและความเร่งในแนวสัมผัสกับความเร็วเชิงมุม
แต่ละจุดของวัตถุที่กำลังหมุนจะมีความเร็วเชิงเส้นต่างกัน ความเร็วของแต่ละจุดซึ่งมีทิศทางสัมผัสกัน วงกลมที่สอดคล้องกันย่อมเปลี่ยนทิศทางอย่างต่อเนื่อง ขนาดของความเร็วถูกกำหนดโดยความเร็วของการหมุนของร่างกายและระยะทาง R ของจุดที่เป็นปัญหาจากแกนการหมุน ปล่อยให้ลำตัวหมุนเป็นมุมในช่วงเวลาสั้นๆ (รูปที่ 2.4) จุดที่อยู่ห่างจากแกน R เคลื่อนที่ในเส้นทางเท่ากับ
ความเร็วเชิงเส้นคะแนนตามคำจำกัดความ
กฎข้อแรกของนิวตัน (หรือ กฎความเฉื่อย)
มีระบบอ้างอิงดังกล่าวซึ่งสัมพันธ์กับวัตถุที่เคลื่อนที่ในการแปลแบบแยกเดี่ยวจะรักษาความเร็วไว้ไม่เปลี่ยนแปลงทั้งในด้านขนาดและทิศทาง
ระบบเฉื่อยนับถอยหลัง คือระบบอ้างอิงที่สัมพันธ์กับจุดวัสดุซึ่งปราศจากอิทธิพลจากภายนอก ซึ่งอยู่นิ่งหรือเคลื่อนที่เป็นเส้นตรงและสม่ำเสมอ (เช่น กับ ความเร็วคงที่).
ในธรรมชาติมีสี่อย่าง ประเภทของการโต้ตอบ
1. แรงโน้มถ่วง (แรงโน้มถ่วง) คือปฏิกิริยาระหว่างวัตถุที่มีมวล
2. แม่เหล็กไฟฟ้า - เป็นจริงสำหรับวัตถุที่มีประจุไฟฟ้า ซึ่งรับผิดชอบต่อแรงทางกล เช่น แรงเสียดทานและความยืดหยุ่น
3. ปฏิสัมพันธ์ที่แข็งแกร่ง - ระยะสั้นนั่นคือมันทำหน้าที่ในระยะห่างของลำดับขนาดของนิวเคลียส
4. อ่อนแอ. ปฏิกิริยาดังกล่าวมีส่วนรับผิดชอบต่อปฏิสัมพันธ์บางประเภทระหว่างอนุภาคมูลฐาน สำหรับการสลายตัวของ β บางประเภท และสำหรับกระบวนการอื่น ๆ ที่เกิดขึ้นภายในอะตอมหรือนิวเคลียสของอะตอม
น้ำหนัก - เป็น ลักษณะเชิงปริมาณคุณสมบัติเฉื่อยของร่างกาย มันแสดงให้เห็นว่าร่างกายตอบสนองต่ออิทธิพลภายนอกอย่างไร
บังคับ - เป็นการวัดเชิงปริมาณของการกระทำของร่างกายหนึ่งต่ออีกร่างกายหนึ่ง
กฎข้อที่สองของนิวตัน
แรงที่กระทำต่อร่างกายเท่ากับผลคูณของมวลกายและความเร่งที่เกิดจากแรงนี้: F=ma
วัดใน
ปริมาณทางกายภาพ, เท่ากับสินค้ามวลกายตามความเร็วของการเคลื่อนไหวเรียกว่า แรงกระตุ้นของร่างกาย (หรือ จำนวนการเคลื่อนไหว- โมเมนตัมของวัตถุเป็นปริมาณเวกเตอร์ หน่วย SI ของแรงกระตุ้นคือ กิโลกรัม-เมตรต่อวินาที (kg m/s).
การแสดงออกของกฎข้อที่สองของนิวตันผ่านการเปลี่ยนแปลงโมเมนตัมของวัตถุ
การเคลื่อนไหวสม่ำเสมอ – คือการเคลื่อนที่ด้วยความเร็วคงที่ กล่าวคือ เมื่อความเร็วไม่เปลี่ยนแปลง (v = const) และความเร่งหรือการลดความเร็วไม่เกิดขึ้น (a = 0)
การเคลื่อนไหวเป็นเส้นตรง - เป็นการเคลื่อนที่เป็นเส้นตรง กล่าวคือ วิถีการเคลื่อนที่เป็นเส้นตรงเป็นเส้นตรง
การเคลื่อนที่ด้วยความเร่งสม่ำเสมอ - การเคลื่อนที่โดยมีความเร่งคงที่ทั้งขนาดและทิศทาง