ระบบ จุดวัสดุ ชุดหนึ่งเรียกว่าซึ่งตำแหน่งและการเคลื่อนที่ของแต่ละจุดขึ้นอยู่กับตำแหน่งและการเคลื่อนที่ของทุกจุดของระบบที่กำหนด ระบบจุดวัสดุมักเรียกว่าระบบกลไก
จุดศูนย์กลางมวลของระบบจุดวัสดุ การหาเวกเตอร์รัศมีของจุดศูนย์กลางมวล คุณสมบัติของจุดศูนย์กลางมวล ความเร็วของจุดศูนย์กลางมวล ที่มาของสมการการเคลื่อนที่ของจุดศูนย์กลางมวล กฎการอนุรักษ์พิกัดจุดศูนย์กลางมวลของระบบจุดวัสดุ
จุดศูนย์กลางมวล (หรือจุดศูนย์กลางความเฉื่อย)
เรียกว่าระบบจุดวัตถุ
จุดจินตภาพ Xia C ตำแหน่ง
ซึ่งเป็นลักษณะการกระจายตัว
มวลของระบบนี้ เวกเตอร์รัศมีของมัน

จุดศูนย์กลางมวลของระบบปิดจะเคลื่อนที่เป็นเส้นตรงและสม่ำเสมอหรือคงอยู่กับที่
จุดศูนย์กลางของความเร็วมวล
สำหรับการกระจายมวลต่อเนื่องโดยมีความหนาแน่น r  - หากแรงโน้มถ่วงที่กระทำกับแต่ละอนุภาคของระบบนั้นมีทิศทางโดยตรง วิธีหนึ่งจากนั้นจุดศูนย์กลางมวลจะตรงกับจุดศูนย์ถ่วง แต่ถ้า ไม่ขนานกันแล้วจุดศูนย์กลางมวลและจุดศูนย์ถ่วงไม่ตรงกัน
- หากแรงโน้มถ่วงที่กระทำกับแต่ละอนุภาคของระบบนั้นมีทิศทางโดยตรง วิธีหนึ่งจากนั้นจุดศูนย์กลางมวลจะตรงกับจุดศูนย์ถ่วง แต่ถ้า ไม่ขนานกันแล้วจุดศูนย์กลางมวลและจุดศูนย์ถ่วงไม่ตรงกัน
เมื่อหาอนุพันธ์ของเวลา เราจะได้: 
เหล่านั้น. แรงกระตุ้นเต็มรูปแบบระบบ เท่ากับสินค้ามวลของมันด้วยความเร็วของจุดศูนย์กลางมวล
เมื่อแทนที่นิพจน์นี้เป็นกฎแห่งการเปลี่ยนแปลงของโมเมนตัมรวม เราจะพบว่า: 
จุดศูนย์กลางมวลของระบบเคลื่อนที่เหมือนอนุภาคที่มวลทั้งหมดของระบบมีความเข้มข้นและมวลผลลัพธ์ถูกนำไปใช้ ภายนอกความแข็งแกร่ง
ที่ ก้าวหน้าเคลื่อนไหวทุกจุด แข็งเคลื่อนที่ในลักษณะเดียวกับจุดศูนย์กลางมวล (ตามวิถีโคจรเดียวกัน) จึงจะอธิบายได้ การเคลื่อนไหวไปข้างหน้าการเขียนและแก้สมการการเคลื่อนที่ของจุดศูนย์กลางมวลก็เพียงพอแล้ว
เพราะ  แล้วจุดศูนย์กลางมวล ระบบปิดต้องรักษาสภาพการพักผ่อนหรือเครื่องแบบ การเคลื่อนไหวเป็นเส้นตรง, เช่น. =const. แต่ในขณะเดียวกันทั้งระบบก็สามารถหมุน บินออกจากกัน ระเบิดได้ ฯลฯ อันเป็นผลมาจากการกระทำ กองกำลังภายใน
.
แล้วจุดศูนย์กลางมวล ระบบปิดต้องรักษาสภาพการพักผ่อนหรือเครื่องแบบ การเคลื่อนไหวเป็นเส้นตรง, เช่น. =const. แต่ในขณะเดียวกันทั้งระบบก็สามารถหมุน บินออกจากกัน ระเบิดได้ ฯลฯ อันเป็นผลมาจากการกระทำ กองกำลังภายใน
.
Rс(t1) = Rc(t2) กฎการอนุรักษ์พิกัดของจุดศูนย์กลางมวล
งานของแรงศักย์ (อนุรักษ์นิยม) โดยใช้แรงโน้มถ่วงเป็นตัวอย่าง การกำหนดสนามแรงศักย์ (อนุรักษ์นิยม) การแนะนำแนวคิด พลังงานศักย์ผ่านการทำงานของกำลัง ความสัมพันธ์ระหว่างแรงและพลังงานศักย์
แรงศักย์คือแรงที่ทำงานขึ้นอยู่กับตำแหน่งเริ่มต้นและตำแหน่งสุดท้ายของจุดที่กระทำเท่านั้น และไม่ขึ้นอยู่กับประเภทของวิถีหรือกฎการเคลื่อนที่ของจุดนี้ แรงอนุรักษ์คือแรงที่ทำงานในเส้นทางปิดใดๆ ก็ตามที่มีค่าเท่ากับ 0
สนามแรงศักย์ไฟฟ้า (อนุรักษ์นิยม): ศักย์ไฟฟ้าคือสนามซึ่งการทำงานเมื่อเคลื่อนที่จากจุดหนึ่งของสนามไปยังอีกจุดหนึ่งไม่ได้ขึ้นอยู่กับรูปร่างของวิถี สนามศักย์คือสนามแรงโน้มถ่วงและสนามไฟฟ้าสถิต
การแนะนำแนวคิดเรื่องศักยภาพ พลังงานผ่านการทำงานของแรง - พลังงานศักย์ - สเกลาร์ ปริมาณทางกายภาพแสดงถึงลักษณะเฉพาะของพลังงานสำรองของวัตถุ (หรือจุดวัสดุ) ที่อยู่ในสนามแรงศักย์ ซึ่งใช้เพื่อรับ (เปลี่ยนแปลง) พลังงานจลน์ของร่างกายเนื่องจากการทำงานของแรงสนาม
ความสัมพันธ์ระหว่างแรงและพลังงานศักย์ - แต่ละจุด สนามที่มีศักยภาพสอดคล้องกับค่าหนึ่งของแรงที่กระทำต่อร่างกายและค่าหนึ่งของพลังงานศักย์ U ซึ่งหมายความว่าจะต้องมีความเชื่อมโยงระหว่างแรงกับ U ในทางกลับกัน dA = –dU
ชุดจุดทางคณิตศาสตร์ การเคลื่อนไหวและตำแหน่งที่กำหนดไว้ล่วงหน้า (เช่น จักรยาน ระบบสุริยะ)
มวลของระบบถูกกำหนดให้เป็น ผลรวมทางคณิตศาสตร์มวลของคะแนนที่รวมอยู่ในระบบ
CMS คือจุดที่ตำแหน่งในอวกาศถูกกำหนดโดยใช้เวกเตอร์รัศมี
2. แรงภายนอกและภายในของระบบจุดวัสดุ คุณสมบัติของแรงภายใน
แรงปฏิกิริยาของพันธะแบ่งออกเป็นแรงปฏิกิริยาที่กำหนดและแรงปฏิกิริยา
แรงภายนอก (F e) คือแรงที่กระทำต่อส่วนต่างๆ ของระบบที่อยู่ระหว่างการพิจารณาจากส่วนต่างๆ ที่ไม่รวมอยู่ในระบบที่อยู่ระหว่างการพิจารณา
แรงภายใน (F i) คือแรงที่มีปฏิสัมพันธ์ระหว่างวัตถุต่างๆ ในระบบที่กำลังพิจารณา
3. การทำงานของกำลังภายในของระบบวัสดุ
ผลรวมของงานที่ทำโดยแรงภายในของระบบที่ไม่สามารถเปลี่ยนแปลงได้สำหรับการเคลื่อนไหวใดๆ จะเท่ากับศูนย์
ให้ A และ B เป็นจุดสองจุดของระบบ
R A และ R B – เท่ากันในโมดูลัสและตรงข้ามใน
ทิศทางของแรงปฏิสัมพันธ์ระหว่างจุดเหล่านี้
เมื่อเคลื่อนที่ จุด A และ B จะได้รับการเคลื่อนไหวเบื้องต้น ds A และ ds B
ในการเคลื่อนที่ ds A II และ ds B II ซึ่งตั้งฉากกับแนวแรงกระทำ แรงจะไม่ทำให้เกิดงาน เนื่องจากระยะห่างระหว่างจุด A และ B ของระบบที่ไม่เปลี่ยนรูปไม่สามารถเปลี่ยนแปลงได้ในระหว่างการเคลื่อนที่ การเคลื่อนที่ ds A I และ ds B I จะต้องเท่ากันและมุ่งไปในทิศทางเดียวกัน มันเป็นไปตามนั้น
4. ทฤษฎีบทการเคลื่อนที่ของจุดศูนย์กลางมวลของระบบ กฎอนุรักษ์การเคลื่อนที่ของจุดศูนย์กลางมวล
โดยที่ c เป็นจุดศูนย์กลางของจุดมวล
A c คือความเร่งของจุดศูนย์กลางมวล
M คือมวลของระบบทั้งหมด
กฎการอนุรักษ์การเคลื่อนที่ของศูนย์กลางมวล: หากผลรวม แสดงว่ากฎการอนุรักษ์การเคลื่อนที่ของศูนย์กลางมวลยังคงอยู่
=>
5. สมการเชิงอนุพันธ์ของการเคลื่อนที่เชิงแปลของวัตถุแข็งเกร็ง
การแปล m*a c =∑F e i
a i =m i *V i จำนวนการเคลื่อนไหวของระบบเมค
m i – มวลของจุดที่ i
F e i - ผลลัพธ์ของทั้งหมด กองกำลังภายนอก
Q i =m i *V i จำนวนการเคลื่อนไหวของจุดที่ i
ลองบวกสมการทั้งหมด (1) ของระบบกัน
…………
________
∑Q ผม =∑ (ม ผม *V ผม)
Q=M*V c (3) ปริมาณการเคลื่อนที่ของทั้งระบบ
M*r c = ∑(ฉัน * r ฉัน) (2)
ให้เราแยกสมการ (2) เทียบกับเวลา:
M*v c =∑(ม ฉัน * r ฉัน)
6. ทฤษฎีบทว่าด้วยการเปลี่ยนแปลงโมเมนตัมของระบบวัสดุ
รูปแบบที่แตกต่าง
แบบฟอร์มอินทิกรัล
ปริมาณการเคลื่อนไหวอยู่ที่ไหน ระบบเครื่องกลในตำแหน่งสุดท้ายและตำแหน่งเริ่มต้น
ผลรวมของพัลส์ที่ตำแหน่งสุดท้ายและตำแหน่งเริ่มต้น
7. โมเมนตัมของวัตถุแข็งเกร็งที่หมุนรอบแกนคงที่
การฉายภาพโมเมนตัมเชิงมุมของวัตถุเกร็งเทียบกับจุดศูนย์กลางใดๆ ลงบนแกน z ใดๆ ที่ผ่านจุดศูนย์กลางนี้เรียกว่าโมเมนตัมเชิงมุม l z ของร่างกายสัมพันธ์กับแกนนี้:
8. ทฤษฎีบทเกี่ยวกับการเปลี่ยนแปลงโมเมนตัมเชิงมุมของระบบวัสดุ
(1) ถ้าผลรวม (1)=0 แล้ว L 0 =const L 0 x =const
อนุพันธ์ของเวลาของโมเมนต์ l z ของโมเมนตัมของจุดที่สัมพันธ์กับแกนคงที่ z เท่ากับโมเมนต์ของแรง F ที่กระทำต่อจุดที่สัมพันธ์กับแกนเดียวกัน
ข้อพิสูจน์จาก (1): ถ้าโมเมนต์ของแรงที่กระทำต่อจุดสัมพันธ์กับแกนใดๆ เป็นระยะเวลาหนึ่ง เท่ากับศูนย์จากนั้นโมเมนตัมเชิงมุมของจุดที่กำหนดซึ่งสัมพันธ์กับแกนนี้จะยังคงคงที่ตลอดเวลา
9. แนวคิดเรื่องโมเมนต์ความเฉื่อยของร่างกาย รัศมีความเฉื่อย
โมเมนต์ความเฉื่อยของวัตถุแข็งเกร็งสัมพันธ์กับแกน z ใดๆ (โมเมนต์ความเฉื่อยในแนวแกน) คือปริมาณสเกลาร์ เท่ากับผลรวมประกอบด้วยผลคูณของมวล m k ของแต่ละจุดของร่างกายด้วยกำลังสองของระยะห่าง r k ถึงแกนที่กำหนด
โมเมนต์ความเฉื่อยของวงแหวนบางอนันต์ ( วงกลมวัสดุ) สัมพันธ์กับแกนการหมุนของมันเท่ากับผลคูณของมวลคูณกับกำลังสองของรัศมี:
โมเมนต์ความเฉื่อยของร่างกายสัมพันธ์กับแกนจะแสดงเป็นผลคูณของมวลของร่างกายด้วยกำลังสองของความยาวของส่วนใดส่วนหนึ่งเรียกว่ารัศมีความเฉื่อยของร่างกายสัมพันธ์กับแกนที่สอดคล้องกัน:
ด้วยรัศมีความเฉื่อยของร่างกายที่สัมพันธ์กับแกนใด ๆ เราสามารถเข้าใจรัศมีของวงแหวนที่บางไม่สิ้นสุดซึ่งจำเป็นต้องรวมมวล M ทั้งหมดของร่างกายเข้าด้วยกันเพื่อให้ได้โมเมนต์ความเฉื่อยของวงแหวน เท่ากับช่วงเวลานั้นความเฉื่อยของร่างกายสัมพันธ์กับแกนนี้
10. โมเมนต์ความเฉื่อยสัมพัทธ์ แกนขนาน(ทฤษฎีบทไฮเกนส์-สไตน์)
โมเมนต์ความเฉื่อยของวัตถุสัมพันธ์กับแกนใดๆ เท่ากับช่วงเวลานั้นความเฉื่อยของร่างกายนี้สัมพันธ์กัน แกนกลางขนานกับแกนที่กำหนด บวกกับผลคูณของมวลกายและกำลังสองของระยะห่างระหว่างแกนเหล่านี้
ทฤษฎีบทไฮเกนส์–สไตน์
11. โมเมนต์ความเฉื่อยตามแนวแกนของวัตถุที่เป็นเนื้อเดียวกัน: แท่ง, กระบอกสูบกลวงและแข็ง, บอล
โมเมนต์ความเฉื่อยของแท่งตรงบางๆ ที่มีหน้าตัดคงที่
โมเมนต์ความเฉื่อยของแท่งเส้นตรงบางที่เป็นเนื้อเดียวกันสัมพันธ์กับแกนกลางของสมมาตรมีค่าเท่ากับ 1/12 ของผลิตภัณฑ์ของมวลของแท่งด้วยกำลังสองของความยาว
โมเมนต์ความเฉื่อยของของแข็ง
กระบอกกลม
โมเมนต์ความเฉื่อยของกระบอกสูบทรงกลมแข็งเนื้อเดียวกันรอบแกนการหมุน เท่ากับครึ่งหนึ่งผลคูณของมวลของทรงกระบอกและกำลังสองของรัศมี
โมเมนต์ความเฉื่อยของทรงกระบอกกลมกลวง
โมเมนต์ความเฉื่อยของทรงกระบอกกลมกลวงที่เป็นเนื้อเดียวกันสัมพันธ์กับแกนการหมุนของมันเท่ากับครึ่งหนึ่งของผลคูณของมวลของกระบอกสูบด้วยผลรวมของกำลังสองของรัศมีด้านนอกและด้านใน
12. สมการไดนามิกของการหมุนของวัตถุแข็งรอบแกนคงที่
ผลคูณของโมเมนต์ความเฉื่อยของวัตถุสัมพันธ์กับแกนการหมุนและความเร่งเชิงมุมของวัตถุเท่ากับโมเมนต์หลักของแรงภายนอกทั้งหมดที่กระทำต่อวัตถุสัมพันธ์กับแกนเดียวกัน
สมการ (1) เรียกว่าสมการไดนามิก การเคลื่อนไหวแบบหมุนร่างกายที่มั่นคง
13. ทฤษฎีบทว่าด้วยการเปลี่ยนแปลงพลังงานจลน์ของระบบวัสดุ
การเปลี่ยนแปลงพลังงานจลน์ของระบบเครื่องกล ณ การกระจัดที่แน่นอนจะเท่ากับผลรวมของงานของแรงภายนอกและภายในที่กระทำต่อจุดวัสดุของระบบ ณ การกระจัดนี้
โดยที่ T คือพลังงานจลน์ในช่วงเวลาสุดท้ายของเวลา
T 0 - พลังงานจลน์เข้า ช่วงเวลาเริ่มต้นเวลา
∑А i e +∑А i j – ผลรวมของการทำงานของแรงภายนอกและภายใน
เงื่อนไข: จำเป็นต้องมีตำแหน่งเริ่มต้นและสิ้นสุด
14. พลังงานจลน์ของระบบวัสดุ ทฤษฎีบทของเคอนิก
ระบบกลไกคือชุดของตัวเครื่องที่เชื่อมต่อกันด้วยการเชื่อมต่อต่างๆ
ตำแหน่งและการเคลื่อนไหวของแต่ละร่างกายถูกกำหนดร่วมกัน พลังงานจลน์ของระบบเครื่องกลถูกกำหนดให้เป็นผลรวมทางคณิตศาสตร์ของพลังงานจลน์ของตัว i ที่รวมอยู่ในระบบ
ทฤษฎีบทของโคนิก:
พลังงานจลน์ของระบบเครื่องกลเท่ากับผลรวมของพลังงานจลน์ของจุดศูนย์กลางมวลของระบบ ซึ่งมวลนั้นเท่ากับมวลของระบบทั้งหมด และพลังงานจลน์ของระบบนี้ที่อยู่ในนั้น การเคลื่อนไหวสัมพัทธ์สัมพันธ์กับศูนย์กลางมวล
15.พลังงานจลน์ของวัตถุแข็งที่ ประเภทต่างๆการเคลื่อนไหวของเขา
พลังงานจลน์ของร่างกายถูกกำหนดขึ้นอยู่กับประเภทของการเคลื่อนไหว
1) การเคลื่อนไหวไปข้างหน้า
2) การเคลื่อนไหวแบบหมุน
3) การเคลื่อนที่แบบระนาบขนาน
16. การเคลื่อนที่ขนานระนาบแบบไดนามิกของวัตถุแข็งเกร็ง
17. หลักการของดาล็องแบร์สำหรับจุดวัตถุ
ผลรวมทางเรขาคณิตของแรงทั้งหมดที่กระทำต่อจุดหนึ่งและแรงเฉื่อยของจุดนี้มีค่าเท่ากับศูนย์ , ที่ไหน
18. หลักการของดาล็องแบร์สำหรับระบบวัสดุ
(i=1,2,…,n) โดยที่คือผลลัพธ์ของแรงที่ระบุที่กระทำต่อจุด - ผลจากปฏิกิริยาของพันธะที่ใช้กับจุดนี้ -แรงเฉื่อยของจุดวัสดุ
สมการแสดงให้เห็นว่า ณ เวลาใดๆ ผลรวมทางเรขาคณิตของผลลัพธ์ของแรงที่ระบุ ปฏิกิริยาผลลัพธ์ของการเชื่อมต่อ และแรงเฉื่อยสำหรับจุดวัสดุแต่ละจุดของระบบกลไกที่ไม่อิสระจะเท่ากับศูนย์
19. เวกเตอร์หลักและโมเมนต์หลักของความเฉื่อยของวัตถุที่แข็งแกร่งอย่างยิ่ง
การเคลื่อนไหวไปข้างหน้า
เวกเตอร์หลักคือช่วงเวลาหลัก โดยที่ J z คือโมเมนต์ความเฉื่อยของร่างกายสัมพันธ์กับแกนการหมุน ε คือค่าพีชคณิตของการเร่งความเร็วเชิงมุมของร่างกาย
20. การเชื่อมต่อทางกลการต่อแบบยึดและไม่ยึด แบบอยู่กับที่และไม่อยู่กับที่ หัวและไม่ใช่หัว
การเชื่อมต่อคือร่างกายที่จำกัดเสรีภาพในการเคลื่อนไหวของร่างกายอื่น
OA=l – เธรดแบบยืดหยุ่น - สมการการเชื่อมต่อแบบเข้มงวด
การจำแนกประเภทของการเชื่อมต่อ:
1) หัว – การเชื่อมต่อที่ไม่มีสมการ
พิกัดส่วนต่าง
2) ตัวที่ไม่ใช่หัว - การเชื่อมต่อที่มีสมการอยู่
พิกัดส่วนต่าง
เครื่องเขียน (สมการที่ไม่มี
พารามิเตอร์ ต.)
ไม่คงที่ (สมการซึ่งประกอบด้วย
พารามิเตอร์ ต.)
การรักษา (สมการถูกกำหนดไว้
ความเท่าเทียมกัน)
ไม่รักษา (สมการถูกกำหนดโดยความไม่เท่าเทียมกัน)
21. การเคลื่อนไหวที่เป็นไปได้
การเคลื่อนไหวที่เป็นไปได้คือการเคลื่อนไหวของร่างกายที่ได้รับอนุญาตจากการเชื่อมต่อที่กำหนดบนระบบ
การเคลื่อนที่ที่เป็นไปได้ของจุดมักจะแสดงด้วยสัญลักษณ์ ตรงกันข้ามกับการเคลื่อนไหวเบื้องต้นที่เกิดขึ้นจริง
22. งานเบื้องต้นเกี่ยวกับแรงเคลื่อนย้ายที่เป็นไปได้ การเชื่อมต่อในอุดมคติ
จุดเชื่อมต่อในอุดมคติคือจุดต่อซึ่งผลรวมของปฏิกิริยาเบื้องต้นใช้งานได้สำหรับการกระจัดของจุดที่เป็นไปได้ใดๆ ในระบบที่มีค่าเท่ากับศูนย์ การเชื่อมต่อในอุดมคติรวมถึงอุปกรณ์ที่อยู่กับที่ทั้งหมด การเชื่อมต่อทางเรขาคณิตไม่มีแรงเสียดทาน
พื้นผิวเรียบ (ปฏิกิริยาถูกส่งตรงไปยังพื้นผิวตามปกติ การเคลื่อนที่ของพันธะดังกล่าวเป็นไปได้เฉพาะในระนาบแทนเจนต์เท่านั้น กล่าวคือ ตั้งฉากกับทิศทางของปฏิกิริยาของพันธะเสมอและงาน = 0)
บานพับคงที่(จุดประยุกต์ปฏิกิริยานี้
การเชื่อมต่อยังคงไม่เคลื่อนไหวไม่ว่าระบบจะเคลื่อนที่อย่างไร
และการทำงานของปฏิกิริยาเป็นศูนย์)
บานพับแบบเคลื่อนย้ายได้ซึ่งเชื่อมต่อระหว่างสองตัวเครื่อง (ปฏิกิริยา R 1 และ R 2
วัตถุเหล่านี้มีขนาดเท่ากันและมุ่งไปในทิศทางเดียว
ตรงไปที่ ฝั่งตรงข้ามสำหรับระดับประถมศึกษาใดๆ
การย้ายจุดประยุกต์ของปฏิกิริยาของการเชื่อมต่อนี้ผลรวมของพวกเขา
งานประถมศึกษาคือ 0)
23. หลักการเคลื่อนไหวที่เป็นไปได้ หลักการของลากรองจ์
เพื่อปรับสมดุลของระบบด้วย การเชื่อมต่อในอุดมคติจำเป็นและเพียงพอที่ผลรวมของงานเบื้องต้นของแรงกระทำทั้งหมดที่ใช้กับแรงนั้นเท่ากับศูนย์สำหรับการกระจัดของระบบที่เป็นไปได้จากตำแหน่งสมดุล
สมมติฐานพื้นฐาน: การกระจัดทั้งหมดมีน้อยมาก (δS, δφ)
การเคลื่อนไหวของจุดต่างๆ ถือเป็นเส้นตรง
24. หลักการดาล็องแบร์ – ลากรองจ์ ( สมการทั่วไประบบไดนามิก)
ผลรวมของงานเบื้องต้นของแรงกระทำหรือแรงที่กำหนดทั้งหมด และผลรวมของงานเบื้องต้นของแรงเฉื่อยทั้งหมดเป็นศูนย์
สมการทั่วไปของพลศาสตร์
25. พิกัดทั่วไป ความเร็ว และความเร่ง
ปริมาณอิสระซึ่งเป็นข้อกำหนดที่กำหนดตำแหน่งของจุดทั้งหมดของระบบกลไกโดยไม่ซ้ำกันเรียกว่าพิกัดทั่วไปของระบบนี้ สำหรับระบบโฮโลโนมิก จำนวนพิกัดทั่วไปที่เป็นอิสระของระบบกลไกจะเท่ากับจำนวนองศาอิสระของระบบนี้
อนุพันธ์ของเวลาของพิกัดทั่วไปเรียกว่าความเร็วทั่วไป
อนุพันธ์ของเวลาของความเร็วทั่วไปเรียกว่าความเร่งทั่วไป
26. แรงทั่วไปและวิธีการคำนวณ
แรงทั่วไปที่สอดคล้องกับพิกัดทั่วไปเรียกว่า ปริมาณสเกลาร์กำหนดโดยความสัมพันธ์ งานพื้นฐาน กองกำลังที่ใช้งานอยู่เกี่ยวกับการเคลื่อนที่ของระบบกลไกที่เกิดจากการเพิ่มขึ้นเบื้องต้นของพิกัดตามขนาดของการเพิ่มขึ้นนี้
แรงทั่วไปแบ่งออกเป็นแรงภายนอกและแรงภายในทั่วไป
27. สภาวะสมดุลของระบบเครื่องกลในพิกัดทั่วไป
สำหรับระบบแรงใดๆ เงื่อนไขสมดุลจะมีรูปแบบ
สภาวะสมดุลของระบบแรงอนุรักษ์มีรูปแบบดังนี้
28. สมการลากรองจ์ชนิดที่สอง
(ญ=1, 2, …, ส)
สมการเหล่านี้ก็คือ สมการเชิงอนุพันธ์ลำดับที่สองเกี่ยวกับพิกัดทั่วไปของระบบ q 1, q 2, ..., q s
29. สมการลากรองจ์ของชนิดที่สองที่เคลื่อนที่ในสนามแรงศักย์
ถ้า ระบบวัสดุเคลื่อนที่ในสนามแรงศักย์ภายใต้อิทธิพลของแรงสนามเท่านั้น (การเชื่อมต่อทั้งหมดที่กำหนดบนระบบเป็นอุดมคติ) จากนั้นสูตรสามารถกำหนดแรงทั่วไปได้
Q i = - dP/dq i
ให้เราแนะนำฟังก์ชัน L=T-P (ศักย์จลน์) มาพิจารณา
ฟังก์ชันนี้เรียกว่าฟังก์ชันลากรองจ์ จากนั้นแทนที่มันลงในสมการลากรองจ์ชนิดที่สอง:
ระบบ สความแตกต่าง สมการที่เรียกว่า สมการลากรองจ์ชนิดที่ 2 สมการเหล่านี้จะถูกนำเสนอ คือความแตกต่าง สมการสัมพัทธ์อันดับสอง พิกัดทั่วไป ระบบ ... บูรณาการสมการเหล่านี้และกำหนดตามจุดเริ่มต้น เราได้รับเงื่อนไขสำหรับการรวมอย่างต่อเนื่อง สสมการ การเคลื่อนไหวของขน ระบบในพิกัดทั่วไป:
30. การสั่นสะเทือนฟรีระบบมวลเดี่ยวที่มีอิสระระดับหนึ่ง
สมการเชิงอนุพันธ์ของการสั่นสะเทือนอิสระ
ระยะเวลาการสั่นฟรี
สมการการเคลื่อนที่ของสินค้า
ความถี่การสั่นสะเทือนฟรี
31. แรงสั่นสะเทือนที่ถูกบังคับ
ด้วยการกระทำของการฟื้นฟูและการรบกวนพร้อมกัน จุดวัสดุจึงเกิดความซับซ้อน การเคลื่อนไหวแบบสั่นซึ่งเป็นผลมาจากการซ้อนทับของอิสระและ การสั่นบังคับคะแนน
การสั่นแบบบังคับไม่ได้ขึ้นอยู่กับ เงื่อนไขเริ่มต้นการเคลื่อนไหวของจุด
สมการของการสั่นบังคับของความถี่ต่ำ
แอมพลิจูดการสั่นความถี่ต่ำ
สมการของการสั่นบังคับของความถี่สูง
แอมพลิจูดการสั่นความถี่สูง
อัตราส่วน η ของแอมพลิจูดของการแกว่งบังคับ A B ต่อค่า A 0 เรียกว่าสัมประสิทธิ์ไดนามิก
32. การสั่นของระบบที่มีระดับความอิสระตั้งแต่สององศาขึ้นไป การสั่นสะเทือนที่อิสระและเป็นธรรมชาติ
การสั่นที่สอดคล้องกับการเปลี่ยนแปลงในพิกัดทั่วไปเพียงพิกัดเดียวเท่านั้นที่ถูกเรียก เป็นเจ้าของ. การสั่นสะเทือนอิสระเป็นผลจากการเพิ่มของตัวเอง ระบบที่มีความอิสระระดับหนึ่งจะมีความถี่การสั่นสะเทือนเพียงความถี่เดียวเท่านั้น ดังนั้นสำหรับพวกเขาการสั่นสะเทือนที่อิสระและเป็นธรรมชาติจึงเกิดขึ้นพร้อมกัน ระบบเสรีภาพสองระดับมีสองความถี่ แรงสั่นสะเทือนตามธรรมชาติ- ในทำนองเดียวกัน สามารถแสดงได้ว่าระบบที่มี n องศาอิสระจะมีความถี่ n ของการแกว่งตามธรรมชาติ กล่าวคือ จำนวนองศาอิสระเท่ากับจำนวนความถี่
33. ปรากฏการณ์การกระแทกที่จุด แรงกระแทกและแรงกระตุ้นกระแทก
การกระแทกเป็นปรากฏการณ์ที่ความเร็วของวัตถุเปลี่ยนแปลงไปในจำนวนจำกัดในช่วงเวลาอันสั้นอันเป็นผลมาจากปฏิสัมพันธ์ของวัตถุ ตามกฎแล้วปรากฏการณ์การกระแทกจะมาพร้อมกับการเสียรูปพลาสติกของวัตถุที่สัมผัสซึ่งเป็นผลมาจากการที่พลังงานกลถูกแปลงเป็นพลังงานความร้อน ดังนั้นในการแก้ปัญหาเกี่ยวกับผลกระทบของวัตถุจึงไม่สามารถใช้ทฤษฎีบทเกี่ยวกับการเปลี่ยนแปลงพลังงานจลน์ได้ ในกรณีเหล่านี้ ทฤษฎีบทเกี่ยวกับการเปลี่ยนแปลงโมเมนตัมและโมเมนตัมเชิงมุมจะถูกนำไปใช้ โดยเขียนในรูปแบบอินทิกรัล
ปรากฏการณ์การกระแทกเป็นปรากฏการณ์ที่ความเร็วของจุดบนร่างกายเปลี่ยนแปลงไปในระยะเวลาอันจำกัด (ลูกบอลชนกำแพง ฯลฯ) ในช่วงเวลาสั้นๆ โดยไม่สนใจ
การเปลี่ยนแปลงครั้งสุดท้ายในจำนวนการเคลื่อนไหวของทีวี วัตถุในช่วงเวลากระแทกที่สั้นโดยประมาทเกิดขึ้นเนื่องจากขนาดของแรงที่เกิดขึ้นระหว่างการกระแทกนั้นมีขนาดใหญ่มาก ซึ่งเป็นผลให้แรงกระตุ้นของแรงเหล่านี้ในระหว่างการกระแทกเป็นค่าที่จำกัด กองกำลังดังกล่าวเรียกว่า - ทันทีหรือช็อก
1) การกระทำของแรงที่ไม่เกิดขึ้นทันทีในระหว่างการกระแทกสามารถละเลยได้
2) ย้าย แม่ คะแนนระหว่างการกระแทกสามารถละเว้นได้
3) ผลลัพธ์ของแรงกระแทกต่อวัสดุ จุดแสดงโดยการเปลี่ยนแปลงอันจำกัดระหว่างผลกระทบของเวกเตอร์ความเร็ว ซึ่งกำหนดโดยสมการ - ข
34. ทฤษฎีบทว่าด้วยการเปลี่ยนแปลงโมเมนตัมของจุดวัตถุเมื่อกระทบ
การเปลี่ยนแปลงโมเมนตัมของระบบกลไกระหว่างการกระแทกมีค่าเท่ากับ ผลรวมทางเรขาคณิตภายนอกทั้งหมด พัลส์ช็อตนำไปใช้กับจุดของระบบ
(1)
สมการนี้เป็นการแสดงออกถึงทฤษฎีบทเกี่ยวกับการเปลี่ยนแปลงจำนวนการเคลื่อนที่ของขน ระบบกระแทก:
การเปลี่ยนจำนวนการเคลื่อนไหวของขน ระบบระหว่างการกระแทก ถึง= ผลรวมเรขาคณิตของแรงกระตุ้นแรงกระแทกภายนอกทั้งหมด สที่แนบมากับระบบ
จำนวนการเคลื่อนไหว สามารถแสดงเป็นมวลของระบบทั้งหมดได้ มและความเร็วของจุดศูนย์กลางมวลของระบบและตามสูตร
ลองแทนสมการเหล่านี้ลงใน (1) แล้วได้สมการนี้ที่กำหนดการเปลี่ยนแปลงความเร็วของจุดศูนย์กลางมวลเมื่อเกิดการกระแทก
ในกรณีที่ไม่มีพัลส์ช็อตภายนอก เรามี:
เมื่อทำปฏิกิริยากับขนสัตว์ ระบบมีเฉพาะแรงสั่นสะเทือนภายในเท่านั้น ปริมาณการเคลื่อนที่ของระบบไม่เปลี่ยนแปลง
หน้า 1
หากเราไม่ลบ แต่บวกสมการ (6.1) เราก็จะได้กฎการอนุรักษ์โมเมนตัม
มันสามารถเขียนใหม่อย่างเป็นทางการล้วนๆ เป็นกฎแห่งความคงตัวในเวลา
Vc ความเร็วบ้าง:
มาดูระบบอ้างอิงที่เคลื่อนที่ด้วยความเร็วกัน (6.4) ความเร็ว
อนุภาค 1 และ 2 จะถูกแปลง ดังต่อไปนี้:
นั่นคือในกรอบอ้างอิงใหม่ พวกมันจะแสดงผ่านความเร็วของสัมพัทธ์
การเคลื่อนไหว ให้เราเชื่อมโยงความเร็ว Vc กับเวกเตอร์รัศมีของจุดใดจุดหนึ่ง รกับ:
โปรดทราบว่าคำจำกัดความ (6.6) เกิดขึ้นพร้อมกับคำที่รู้จัก หลักสูตรของโรงเรียน
แนวคิดทางฟิสิกส์เรื่องจุดศูนย์ถ่วง เพื่อพิสูจน์ เรามาเริ่มกันที่จุดเริ่มต้นกันดีกว่า
พิกัดที่จะชี้ รกับ. จากนั้นเราได้รับความคล้ายคลึงกับ (6.5) อย่างสมบูรณ์
ดังนั้น,
(จุดศูนย์ถ่วงถูกกำหนดโดยความเท่าเทียมกันของผลิตภัณฑ์ของมวลและ "ไหล่") แต่คำจำกัดความ (6.4) และ (6.6) มีความถูกต้องและเป็นสากลมากกว่า เนื่องจากสามารถสรุปได้ทั่วไปโดยไม่มีปัญหาใดๆ กับประเด็นสำคัญจำนวนเท่าใดก็ได้ ดังนั้น
ร่างกายที่มองเห็นด้วยตาเปล่า จุด C ในกลศาสตร์ - และในฟิสิกส์โดยทั่วไป - มักเรียกว่า
จุดศูนย์กลางมวลหรือจุดศูนย์กลางความเฉื่อยของระบบจุดวัสดุ
เข้ามาบ้าง. ระบบเฉื่อยพิกัดตำแหน่งของจุดวัสดุที่มีปฏิสัมพันธ์กับมวล m 1, m 2, ... m N ถูกระบุในแต่ละช่วงเวลา t โดยใช้เวกเตอร์รัศมี ร 1(ท) ร 2 (ท), ... รยังไม่มีข้อความ
(ดูรูปที่ 6.3 ก) จากนั้นจุดศูนย์กลางมวลของระบบจุดวัสดุที่พิจารณาคือจุดที่มีรัศมีเวกเตอร์ ร ร 1(ท) ร 2 (ท), ... ร N (t) คะแนนวัสดุตาม
เราขอเน้นย้ำว่าใน กรณีทั่วไปตำแหน่งศูนย์กลางมวลไม่ตรงกัน
ตำแหน่งของจุดวัสดุใด ๆ ของระบบ (ดูรูปที่ 6.3 b)
แม้ว่าบางครั้งสิ่งนี้ก็สามารถเกิดขึ้นได้

ข้าว. 6.3 จุดศูนย์กลางมวลของระบบจุดวัสดุคือจุดที่มีรัศมีเวกเตอร์ ร c(t) แสดงในรูปของเวกเตอร์รัศมี ร 1(ท) ร 2 (ท), ... ร N(t) จุดวัสดุ
ให้เราแยกความแตกต่างด้านซ้ายและขวาของความเท่าเทียมกัน (6.7) ตามเวลา
อนุพันธ์ของเวกเตอร์รัศมีเทียบกับเวลา ตามนิยามแล้ว คือ ความเร็ว ดังนั้น
สิ่งที่เราได้รับตามมา
โดยที่ Vc คือความเร็วของจุดศูนย์กลางมวล v 1, v 2,... v N คือความเร็วของจุดวัตถุ ปริมาณ m 1 v 1 in (6.8) คือโมเมนตัมของจุดวัสดุจุดแรก m 2 V 2 คือโมเมนตัมของจุดที่สอง และ
ฯลฯ ดังนั้น ในวงเล็บปีกกาของนิพจน์ (6.8) คือผลรวมของแรงกระตุ้นของระบบของจุดวัสดุที่กำลังพิจารณา นั่นคือ แรงกระตุ้น P ของทั้งระบบ ดังนั้น ความเท่าเทียมกัน (6.8) สามารถเขียนใหม่ได้ในรูปแบบ
P = (ม. 1 + ม. 2 + .... + ม. ยังไม่มีข้อความ )V ค. (6.9)
ในกรอบอ้างอิงที่จุดศูนย์กลางมวลอยู่นิ่ง
หากเราไม่สนใจการเคลื่อนที่สัมพัทธ์ของจุดวัสดุ แต่สนใจการเคลื่อนที่ของระบบโดยรวม ระบบทั้งหมดก็ถือได้ว่าเป็นจุดวัสดุจุดเดียวที่เคลื่อนที่ด้วยความเร็ว Vc และมีโมเมนตัม P จำได้ว่ามวล ของจุดวัตถุ ตามคำนิยามแล้ว คือสัมประสิทธิ์ของสัดส่วนระหว่างแรงกระตุ้นและความเร็ว ดังนั้น ค่าสัมประสิทธิ์ของสัดส่วนในความเท่าเทียมกัน (6.9) ซึ่งอยู่ในวงเล็บปีกกาคือมวล M ของระบบที่อยู่ระหว่างการพิจารณา:
ม = ม. 1 + ม. 2 + …. + ม ยังไม่มีข้อความ , (6.10)
นั่นคือมวลของระบบจุดวัตถุเท่ากับผลรวมของมวลของจุดเหล่านี้ ความสัมพันธ์ (6.10) ตามมวล ร่างกายที่ซับซ้อนเท่ากับผลรวมของมวลของชิ้นส่วนดูเหมือนคุ้นเคยและชัดเจนสำหรับเรา อย่างไรก็ตาม ดังที่เราจะได้เห็นในภายหลัง ในกลไกเชิงสัมพัทธภาพ (เช่น ในกรณีทั่วไป) สถานการณ์จะแตกต่างไปจากเดิมอย่างสิ้นเชิง ในกรณีที่จำกัดของกลศาสตร์ของนิวตัน ความเท่าเทียมกัน (6.10) คือ กรณีพิเศษแน่ใจ
กฎหมายทางกายภาพ- กฎการอนุรักษ์มวล
ในกรณีที่ไม่มีแรงภายนอก เช่น สำหรับระบบปิด ผลรวมของแรงกระตุ้นของส่วนต่างๆ ของระบบไม่ขึ้นอยู่กับเวลา จากนั้นจาก (6.9) เป็นไปตามคุณสมบัติที่สำคัญของการเคลื่อนที่ของจุดศูนย์กลางมวลของระบบปิดของจุดวัสดุ:
เช่น. จุดศูนย์กลางมวลของระบบปิดของจุดวัตถุนั้นไม่มีการเคลื่อนที่หรือ
เคลื่อนที่สม่ำเสมอและเป็นเส้นตรงแม้ว่าแต่ละจุดวัสดุจะสามารถทำได้ก็ตาม การเคลื่อนไหวที่ซับซ้อน- ข้อความข้างต้นบางครั้งเรียกว่าทฤษฎีบทการเคลื่อนที่ของจุดศูนย์กลางมวล
ตอนนี้เราจะพิสูจน์คุณสมบัติที่สำคัญของพลังงานจลน์ดังต่อไปนี้:
พลังงานจลน์ T ของระบบจุดวัตถุเท่ากับผลรวมของพลังงานจลน์ของมวลทั้งหมดของระบบ ซึ่งมีสมาธิอยู่ที่ศูนย์กลางมวลและเคลื่อนที่ไปพร้อมกับมัน และพลังงานจลน์ T ของระบบเดียวกันในระบบเดียวกัน การเคลื่อนที่สัมพัทธ์เทียบกับระบบอ้างอิงที่เคลื่อนที่โดยมีจุดศูนย์กลางมวล:

โดยที่ M = ม. 1 + ม. 2 + ... + ม. N. Vc คือความเร็วของจุดศูนย์กลางมวลในกรอบอ้างอิงดั้งเดิม v i คือความเร็วของจุดวัสดุที่ i สัมพันธ์กับกรอบอ้างอิงที่เคลื่อนที่ไปพร้อมกับจุด C ระบบดังกล่าวมักเรียกว่า "ศูนย์กลางของระบบมวล" , “ศูนย์กลางของระบบความเฉื่อย” หรือเรียกง่ายๆ ว่า “ระบบ c” (ระบบอ้างอิงที่เกิดปัญหา หากระบบนี้ไม่ตรงกับระบบ c มักจะเรียกว่าระบบอ้างอิงในห้องปฏิบัติการหรือระบบ l)
เพื่อพิสูจน์สิ่งนี้ ขั้นแรกเราจะได้รับความสัมพันธ์ทั่วไปที่มากขึ้นซึ่งเชื่อมโยงพลังงานจลน์ในระบบอ้างอิงสองระบบ (ดูรูปที่ 6.4) สำหรับพิกัดและความเร็วของจุดในระบบเก่า R i, V i และในระบบใหม่ r i, v i เราเขียนการแปลงแบบกาลิเลียน:
โดยที่ R คือเวกเตอร์รัศมีของการเปลี่ยนจากระบบเก่าไปเป็นระบบใหม่ และ V คือความเร็วของการเคลื่อนที่ของระบบใหม่เมื่อเทียบกับระบบเก่า
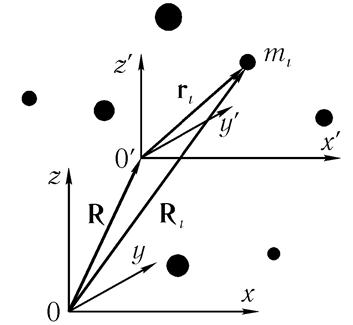
ข้าว. 6.4 การเชื่อมต่อพิกัดในระบบอ้างอิงสองระบบ
จากนั้นพลังงานจลน์ในกรอบอ้างอิงแบบเก่าสามารถแสดงเป็นได้
 (6.12)
(6.12)
ทางด้านขวาของ (6.12) สามารถแสดงเป็นผลรวมสามค่า:
โดยที่ P คือโมเมนตัมรวมของระบบจุดวัสดุในกรอบอ้างอิงใหม่ ความสัมพันธ์ (6.13) โดยทั่วไปเรียกว่าทฤษฎีบทของโคนิก ถ้า ระบบใหม่เกิดขึ้นพร้อมกับระบบ q ดังนั้นโมเมนตัมทั้งหมดในระบบจะเป็นศูนย์ V = Vc ซึ่งหมายความว่าความสัมพันธ์ (6.11) ยังคงอยู่
เพื่อสรุปส่วนนี้ ให้เราทราบสอง คุณสมบัติที่สำคัญเกิดจากนิยามจุดศูนย์กลางมวล ประการแรก อนุภาคใน (6.7) สามารถรวมกันเป็นกลุ่มใดก็ได้ ตัวอย่างเช่น:
จากตรงนี้ ตามที่เข้าใจง่าย จะพบว่าจุดศูนย์กลางมวลของระบบใดๆ ของวัตถุที่มองเห็นด้วยตาเปล่าสามารถหาได้ว่าเป็นจุดศูนย์กลางมวลของระบบจุดวัตถุ ภายใต้สมมติฐานว่ามวลของวัตถุแต่ละชิ้นมีความเข้มข้นอยู่ใน ศูนย์กลางมวลของตัวเอง
และประการที่สอง จากผลรวมใน (6.7) มันง่ายที่จะย้ายไปบูรณาการ
หากเราคำนวณตำแหน่งของจุดศูนย์กลางมวลของร่างกายด้วยการกระจายความหนาแน่นของสสารอย่างต่อเนื่อง ρ(t):
