లివర్ మెకానిజం- ఇది రాడ్-ఆకారపు లివర్ నిర్మాణాల రూపంలో చేసిన లింక్ల ద్వారా ఏర్పడిన యంత్రాంగం.
దాదాపు అన్ని రకాల యంత్రాలలో లివర్ మెకానిజమ్స్ విస్తృతంగా ఉన్నాయి.
2.1 లివర్ మెకానిజమ్స్ వర్గీకరణ
లివర్ మెకానిజమ్స్ యొక్క మొత్తం వివిధ రకాలైన కైనమాటిక్ చైన్ మరియు స్ట్రక్చర్ ప్రకారం వర్గీకరించబడింది.
కైనమాటిక్ చైన్ రకం ఆధారంగా, రెండు సమూహాలు ప్రత్యేకించబడ్డాయి.
క్లోజ్డ్ కినిమాటిక్ చైన్తో మెకానిజమ్స్ - ఇవి లివర్ మెకానిజమ్స్ -
వాటి నిర్మాణంలో మాత్రమే క్లోజ్డ్ కినిమాటిక్ కలిగి ఉండే నిస్మ్స్
స్కీ చైన్లు (Fig. 1.6, Fig. 2.1 చూడండి).
ఓపెన్ కినిమాటిక్ చైన్తో మెకానిజమ్స్ - ఇవి లివర్ మెకానిజమ్స్
వాటి నిర్మాణంలో ఉన్న మెకానిజమ్లు కినిమాటిక్ గొలుసులను మాత్రమే తెరుస్తాయి (Fig. 1.4, c, Fig. 2.7 చూడండి).
చాలా సందర్భాలలో, క్లోజ్డ్ కినిమాటిక్ చైన్తో లివర్ మెకానిజమ్లు ప్లేన్ మెకానిజమ్స్, మరియు ఓపెన్ కినిమాటిక్ చైన్తో లివర్ మెకానిజమ్లు ప్రాదేశికమైనవి.
లివర్ మెకానిజమ్స్ యొక్క నిర్మాణం ప్రాథమికంగా, సరళంగా లేదా సంక్లిష్టంగా ఉంటుంది.
ఎలిమెంటరీ మెకానిజమ్స్- ఇవి యంత్రాంగాలు, దీని నిర్మాణాన్ని స్వతంత్రంగా కదలికను మార్చగల భాగాలుగా విభజించలేము
(Fig. 2.3).
సాధారణ యంత్రాంగాలు- ఇవి లివర్ మెకానిజమ్స్, దీని నిర్మాణం ఒక ప్రాథమిక యంత్రాంగం మరియు ఒక నిర్మాణ సమూహాన్ని కలిగి ఉంటుంది
(Fig. 1.6, Fig. 2.1).
కాంప్లెక్స్ మెకానిజమ్స్- ఇవి లివర్ మెకానిజమ్స్, దీని నిర్మాణం ఒకటి లేదా అంతకంటే ఎక్కువ ప్రాథమిక యంత్రాంగాలు మరియు రెండు లేదా అంతకంటే ఎక్కువ నిర్మాణ సమూహాలను కలిగి ఉంటుంది.
కాంప్లెక్స్ లివర్ మెకానిజమ్స్ విభజించబడ్డాయి:
ఒకే రకంలోకి - ఇవి సంక్లిష్టమైన లివర్ మెకానిజమ్స్, దీని నిర్మాణం ఒకే ప్రాథమిక విధానాలు మరియు లింక్ల యొక్క నిర్మాణ సమూహాలను కలిగి ఉంటుంది;
బహుళ-రకం - ఇవి సంక్లిష్టమైన లివర్ మెకానిజమ్స్, దీని నిర్మాణం వివిధ ప్రాథమిక విధానాలు మరియు లింక్ల యొక్క వివిధ నిర్మాణ సమూహాలను కలిగి ఉంటుంది;
కలిపి- ఇవి సంక్లిష్టమైన లివర్ మెకానిజమ్స్, వీటి నిర్మాణం సారూప్య మరియు బహుళ-రకం మెకానిజమ్ల కలయిక ఫలితంగా ఏర్పడుతుంది.
అన్ని సాధారణ లివర్ మెకానిజమ్స్ ఫ్లాట్ మెకానిజమ్స్, ఇవి ప్రాథమిక విలక్షణ పథకాలుగా విభజించబడ్డాయి:
కీలు యంత్రాంగం (Fig. 1.6, b చూడండి);
2. లివర్ గేర్స్
2.1.
క్రాంక్-స్లయిడర్ మెకానిజం (Fig. 1.6, a చూడండి); రాకర్ మెకానిజం (Fig. 2.1, a); టాంజెన్షియల్ మెకానిజం (Fig. 2.1, b); సైనస్ మెకానిజం (Fig. 2.1, c).
ఫ్లాట్ లివర్ మెకానిజమ్స్ యొక్క కదిలే లింకులు సరళమైన కదలికలు (భ్రమణ మరియు అనువాద) మరియు సంక్లిష్ట కదలికలు రెండింటినీ నిర్వహించగలవు.
అన్నం. 2.1 సాధారణ ఫ్లాట్ లివర్ మెకానిజమ్స్ యొక్క బ్లాక్ రేఖాచిత్రాలు
భ్రమణ కదలికలను చేసే లింక్లలో క్రాంక్, రాకర్ ఆర్మ్, రాకర్ మరియు స్వింగ్ స్లయిడర్ ఉన్నాయి.
క్రాంక్ అనేది లివర్ మెకానిజం యొక్క లింక్, ఇది కేవలం భ్రమణ కైనమాటిక్ జతలలో భాగం మరియు 360° కంటే ఎక్కువ కోణంలో భ్రమణ అక్షం చుట్టూ తిరిగే సామర్థ్యాన్ని కలిగి ఉంటుంది (Fig. 1.6, Fig. 2.1, లింక్ 1 చూడండి) .
రాకర్ ఆర్మ్ అనేది లివర్ మెకానిజం యొక్క లింక్, ఇది కేవలం భ్రమణ కైనమాటిక్ జతలలో భాగం మరియు 360° కంటే తక్కువ కోణంలో భ్రమణ అక్షం చుట్టూ తిరిగే సామర్థ్యాన్ని కలిగి ఉంటుంది (Fig. 1.6, లింక్ 4 చూడండి).
లింక్ అనేది లివర్ మెకానిజం యొక్క లింక్, ఇది భ్రమణ మరియు అనువాద కినిమాటిక్ జతలలో భాగం మరియు 360 ° కంటే తక్కువ కోణంలో భ్రమణ అక్షం చుట్టూ తిరిగే సామర్థ్యాన్ని కలిగి ఉంటుంది (Fig. 2.1, లింక్ 5).
రాకింగ్ స్లయిడర్− ఇది ఒక లివర్ మెకానిజం యొక్క లింక్, ఇది ఒక రాడ్తో ట్రాన్స్లేషనల్ కినిమాటిక్ జత మరియు స్టాండ్తో భ్రమణ కైనమాటిక్ జతను ఏర్పరుస్తుంది.
అందించిన అన్ని లింక్లు ర్యాక్తో పరస్పర చర్య చేస్తాయి. ఈ సందర్భంలో, చాలా సందర్భాలలో క్రాంక్ ప్రారంభ, సెట్ లేదా ప్రముఖ లింక్.
అనువాద కదలికలను చేసే లింక్లలో స్లయిడర్, రాయి మరియు రాడ్ ఉన్నాయి.
స్లయిడర్ అనేది స్టాండ్తో ట్రాన్స్లేషనల్ కినిమాటిక్ జతని ఏర్పరిచే లింక్ (Fig. 1.6, లింక్ 3 చూడండి).
రాయి అనేది స్లయిడ్ (Fig. 2.1, లింక్ 6)తో అనువాద కైనమాటిక్ జతను ఏర్పరుస్తుంది.
రాడ్ అనేది స్వింగింగ్ లేదా స్టేషనరీ స్లయిడర్ (Fig. 2.1, లింక్ 7)తో అనువాద కైనమాటిక్ జతను ఏర్పరుస్తుంది.
కనెక్ట్ చేసే రాడ్లు సంక్లిష్ట కదలికలను చేసే లింకులు.
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |

2. లివర్ గేర్స్
2.1. లివర్ మెకానిజమ్స్ వర్గీకరణ
కనెక్ట్ చేసే రాడ్ అనేది లివర్ మెకానిజంలోని లింక్, ఇది ర్యాక్తో కనెక్షన్లు లేని కదిలే లింక్లతో మాత్రమే కైనమాటిక్ జతలను ఏర్పరుస్తుంది.
(Fig. 1.6, లింక్ 2 చూడండి).
2.2 లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
ఏదైనా లివర్ మెకానిజం యొక్క నిర్మాణాన్ని అధ్యయనం చేస్తున్నప్పుడు, రెండు దిశలు ప్రత్యేకించబడ్డాయి: నిర్మాణ విశ్లేషణ మరియు నిర్మాణ సంశ్లేషణ.
నిర్మాణ విశ్లేషణమెకానిజం యొక్క నిర్మాణాన్ని అధ్యయనం చేసే ప్రక్రియ, అనగా అవి చేసే లింకుల సంఖ్య మరియు కదలికల రకాలు, కినిమాటిక్ జతల సంఖ్య మరియు రకం, నిర్మాణ సమూహాలు మరియు కినిమాటిక్ చైన్లు, చలనశీలత సంఖ్య మరియు లోపాల ఉనికిని నిర్ణయించడం.
యంత్రాంగాల యొక్క నిర్మాణ విశ్లేషణ వారి నిర్మాణంలో లోపాలను గుర్తించడానికి నిర్వహించబడుతుంది, అవసరమైతే అవి తొలగించబడతాయి.
నిర్మాణ లోపాలను తొలగించడం (తొలగించడం) యొక్క ఉదాహరణగా, అహేతుక నిర్మాణంతో ఫ్లాట్ లివర్ మెకానిజంను పరిగణించండి (Fig. 1.12, a చూడండి). లింక్ల పొడవు క్రింది నిష్పత్తులలో ఉన్నట్లయితే మాత్రమే ఈ యంత్రాంగం పని చేస్తుంది:
yakh: l OA = l BC, l AB = l DE = l OC andl OD = l EC. తత్ఫలితంగా, మెకానిజం యొక్క పాయింట్లు OABC ఫిగర్ను ఏర్పరుస్తాయి, ఇది ఎల్లప్పుడూ సమాంతర చతుర్భుజం. అప్పుడు, మెకానిజం లింక్ల కదలికలను మార్చకుండా, మీరు కనెక్ట్ చేసే రాడ్ 2ని తీసివేయవచ్చు, ఎందుకంటే ఈ లింక్, D మరియు E పాయింట్ల వద్ద కీలు కేంద్రాలతో 1 మరియు 4 లింక్లతో కైనమాటిక్ జతలను ఏర్పరుస్తుంది, ఈ లింక్లపై ప్రభావం చూపని కనెక్షన్ షరతులను విధిస్తుంది. వారి కదలిక స్వభావం. ఈ సందర్భంలో, 1 మరియు 4 లింక్లపై రాడ్ 2ని కనెక్ట్ చేయడం ద్వారా విధించిన కనెక్షన్ షరతులు నిష్క్రియంగా లేదా అనవసరంగా ఉంటాయి. ప్రతిగా, D మరియు E పాయింట్ల వద్ద కీలు కేంద్రాలతో కైనమాటిక్ జతల కదలిక స్థానిక చలనశీలతకు ఒక ఉదాహరణ, ఎందుకంటే అవి లేనప్పుడు యంత్రాంగం యొక్క మిగిలిన లింక్ల కదలిక మారదు. రాడ్ 2ని కనెక్ట్ చేయడానికి బదులుగా మెకానిజం యొక్క నిర్మాణం నుండి కనెక్ట్ చేసే రాడ్ 3 మినహాయించబడినట్లయితే ఇదే విధమైన పరిస్థితి ఏర్పడుతుంది.
నిర్మాణ లోపాలను తొలగించడానికి, మెకానిజం సర్క్యూట్ మరియు వాటి సంఖ్యలో అనవసరమైన లేదా నిష్క్రియాత్మక కనెక్షన్ల ఉనికిని ఖచ్చితంగా తెలుసుకోవడం అవసరం. అనవసరమైన లేదా నిష్క్రియ కనెక్షన్ల సంఖ్యను లెక్కించడానికి, కింది సంబంధం ఉపయోగించబడుతుంది:
q =W o +W m +W,
ఇక్కడ W o ,W m ,W – ఇవ్వబడిన, స్థానిక మరియు లెక్కించబడిన చలనశీలత.
రిడండెంట్, లేదా పాసివ్, కనెక్షన్లు అనేక సర్క్యూట్లతో క్లోజ్డ్ కినిమాటిక్ చైన్లలో మాత్రమే అందుబాటులో ఉంటాయి. మెకానిజమ్స్లో రెండు రకాల సర్క్యూట్లు ఉన్నాయి: డిపెండెంట్ మరియు ఇండిపెండెంట్. కనీసం ఒక లింక్ ద్వారా ఇతర సర్క్యూట్ల నుండి భిన్నంగా ఉంటే సర్క్యూట్ స్వతంత్రంగా ఉంటుంది. డిపెండెంట్ సర్క్యూట్లుఒకదానికొకటి నకిలీ, మరియు వాటిని రూపొందించే లింక్లు అనవసరమైన లేదా నిష్క్రియ కనెక్షన్లను సృష్టిస్తాయి. కాబట్టి అంజీర్లో ప్రదర్శించబడిన యంత్రాంగం యొక్క నిర్మాణం. 1.12, అనేక సర్క్యూట్లను కలిగి ఉంది - OABC మరియు ODEC. ఆకృతులు ఆధారపడి ఉంటాయి, ఎందుకంటే అవి ఒకే మొత్తంలో ఏర్పడతాయి
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.2.
మరియు లింకుల రకాలు. అదే సమయంలో, ఈ మెకానిజం యొక్క నిర్మాణం లోపాలను కలిగి ఉందని మేము ఇంతకుముందు కనుగొన్నాము, అనగా, ఇది అనవసరమైన లేదా నిష్క్రియాత్మక కనెక్షన్లు మరియు స్థానిక చలనశీలతను కలిగి ఉంటుంది, ఇది ఆధారపడిన సర్క్యూట్ల ఉనికిని నిర్ధారిస్తుంది. అందువల్ల, ఆధారపడిన సర్క్యూట్ల సంఖ్యను నిర్ణయించడానికి, మెకానిజం యొక్క మొత్తం సర్క్యూట్ల సంఖ్యను తెలుసుకోవడం అవసరం. సర్క్యూట్ల సంఖ్య వ్యక్తీకరణను ఉపయోగించి నిర్ణయించబడుతుంది
K = p− n,
ఇక్కడ p అనేది మెకానిజం యొక్క నిర్మాణంలోని కినిమాటిక్ జతల సంఖ్య; n అనేది మెకానిజం యొక్క కదిలే లింక్ల సంఖ్య,
n = k− 1,
ఇక్కడ k అనేది స్టాండ్తో సహా మొత్తం మెకానిజం లింక్ల సంఖ్య.
నిర్మాణ లోపాలను మినహాయించిన తరువాత, నిర్మాణ సమూహాల సంఖ్య, కినిమాటిక్ జతల సంఖ్య మరియు రకం, ప్రధాన కదలికల సంఖ్య నిర్ణయించబడతాయి, ఆపై, అవుట్పుట్ లింక్ నుండి ప్రారంభించి, సున్నాకి సమానమైన కదలికను కలిగి ఉన్న లింక్ల సమూహాలు వేరు చేయబడతాయి. యంత్రాంగం. ఈ సందర్భంలో, మెకానిజంలో మిగిలి ఉన్న లింక్లు ప్రముఖ లింక్తో కనెక్షన్ను కోల్పోకుండా చూసుకోవడం అవసరం.
సాధారణంగా, లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ క్రింది సమస్యలను పరిష్కరించడానికి క్రిందికి వస్తుంది:
ప్రాదేశిక యంత్రాంగాల కోసం:
2) యంత్రాంగం యొక్క యుక్తిని నిర్ణయించడం.
ఫ్లాట్ మెకానిజమ్స్ కోసం:
1) యంత్రాంగం యొక్క చలనశీలతను నిర్ణయించడం;
2) యంత్రాంగం యొక్క నిర్మాణం యొక్క విశ్లేషణ.
నిర్మాణాత్మక విశ్లేషణ యొక్క సమర్పించిన సమస్యలను పరిశీలించిన తరువాత, రెండు రకాల లివర్ మెకానిజమ్ల కోసం మొదటి సమస్య యొక్క సారూప్యతను మేము గమనించవచ్చు. అదే సమయంలో, రెండవ పనులు, సూత్రీకరణలో కొన్ని వ్యత్యాసాలు ఉన్నప్పటికీ, అదే లక్ష్యాన్ని అనుసరిస్తాయి - నిర్మాణ లోపాల ఉనికిని గుర్తించడం.
యంత్రాంగాల కదలిక
యంత్రాంగం యొక్క మొబిలిటీ- ఇది ఒక విమానంలో లేదా అంతరిక్షంలో పరిగణించబడే సమయంలో మెకానిజం లింక్ల స్థానాలను ప్రత్యేకంగా నిర్ణయించే స్వతంత్ర సాధారణీకరించిన కోఆర్డినేట్ల సంఖ్య.
ప్రాదేశిక యంత్రాంగాల చలనశీలతను నిర్ణయించడానికి నిర్మాణాత్మక సూత్రాలు P. I. సోమోవ్ మరియు ఫ్లాట్ మెకానిజమ్స్ కోసం - P. L. చెబిషెవ్ ద్వారా పొందబడ్డాయి. రెండు నిర్మాణ సూత్రాలు వాటి నిర్మాణం యొక్క ఒకే సూత్రాలపై ఆధారపడి ఉంటాయి; కాబట్టి, సాధారణ రూపంలో, నిర్మాణ సూత్రాలను ఇలా సూచించవచ్చు
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.2. లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
W = H n+ ∑ (H− i) pi ,
i= 1n
ఇక్కడ H అనేది చలనశీలత యొక్క డిగ్రీల సంఖ్య (స్పేషియల్ మెకానిజమ్స్ కోసం H = 6, ఫ్లాట్ మెకానిజమ్స్ కోసం H = 3); p i అనేది చలనశీలత యొక్క కైనమాటిక్ జతల సంఖ్య;
i అనేది కైనమాటిక్ జత యొక్క చలనశీలత సంఖ్య. నిర్మాణ సూత్రాలు రెండు రకాల వ్రాతలను కలిగి ఉంటాయి: 1) కైనమాటిక్ జతల తరగతులలో:
ఫ్లాట్ మెకానిజమ్స్ కోసం P.L. చెబిషెవ్ సూత్రం:
W = 3 n− 2 p5 - p4 ,
W =6 n -5 p 5 -4 p 4 −3 p 3 -2 p 2 -p 1 ,
ఇక్కడ p 5 , p 4 , p 3 , p 2 , p 1 - వరుసగా ఐదవ, నాల్గవ, మూడవ, రెండవ మరియు మొదటి తరగతికి చెందిన కినిమాటిక్ జతల సంఖ్య;
2) కైనమాటిక్ జతల చలనశీలత స్థాయిలలో: ఫ్లాట్ మెకానిజమ్స్ కోసం, P.L. చెబిషెవ్ సూత్రం:
W = 3 n− 2 p1 - p2 ,
ప్రాదేశిక యంత్రాంగాల కోసం P.I. సోమోవ్ సూత్రం:
W =6 n -5 p 1 -4 p 2 −3 p 3 -2 p 4 -p 5 ,
ఇక్కడ p 1 , p 2 , p 3 , p 4 , p 5 – వరుసగా ఒకటి, రెండు, మూడు, నాలుగు మరియు ఐదు కదలికలను కలిగి ఉన్న కినిమాటిక్ జతల సంఖ్య.
లివర్ మెకానిజమ్స్ యొక్క నిర్మాణం యొక్క కూర్పు
లివర్ మెకానిజమ్ల విశ్లేషణ మరియు సంశ్లేషణ సమస్యలను పరిష్కరించడానికి, ప్రొఫెసర్ L.V. అసూర్ అసలైన నిర్మాణ వర్గీకరణను ప్రతిపాదించారు, దీని ప్రకారం అనవసరమైన కనెక్షన్లు మరియు స్థానిక చలనశీలత లేని యంత్రాంగాలు ప్రాథమిక (ప్రాథమిక) మెకానిజమ్స్ మరియు లింక్ల నిర్మాణ సమూహాలను కలిగి ఉంటాయి (Fig. 2.2. )
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |

2. లివర్ గేర్స్
2.2. లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
నిర్మాణ సంశ్లేషణ
మెకానిజం = PM+...+ PM+ SGZ+...+ SGZ
నిర్మాణ విశ్లేషణ
అన్నం. 2.2 అసూర్ ప్రకారం మెకానిజం నిర్మాణం యొక్క కూర్పు
ప్రాథమిక యంత్రాంగం(PM) అనేది కదిలే మరియు స్థిరమైన లింక్లతో కూడిన ఒక ప్రాథమిక విధానం, ఇది ఒకటి లేదా అంతకంటే ఎక్కువ చలనశీలతతో ఒక కినిమాటిక్ జతను ఏర్పరుస్తుంది (Fig. 2.3).
ప్రాథమిక యంత్రాంగాలు | ||||||
చలనశీలత W = 1తో | చలనశీలత W > 1తో | |||||
అన్నం. 2.3 ప్రాథమిక యంత్రాంగాలు
నిర్వచనం ప్రకారం, అన్ని ప్రాధమిక (ప్రాథమిక) మెకానిజమ్లు ఒక స్టాండ్తో ఒక కదిలే లింక్ కలయికతో ఏర్పడతాయి మరియు అవి ఫస్ట్-క్లాస్ మెకానిజమ్స్. ఈ సందర్భంలో, తరగతి కదిలే లింక్ల సంఖ్యకు అనుగుణంగా ఉంటుంది.
లింక్ల నిర్మాణ సమూహం(SGZ) అనేది ఒక కైనమాటిక్ చైన్ ఏర్పడుతుంది
మెకానిజం యొక్క కదిలే లింక్ల ద్వారా స్నానం చేయబడుతుంది, దీని కదలిక అంతరిక్షంలో మరియు విమానంలో ఎప్పుడైనా సున్నాగా ఉంటుంది మరియు సారూప్య లక్షణాలతో సరళమైన గొలుసులుగా విడిపోదు
(బియ్యం. 2.4., Fig. 2.5., Fig. 2.6).
ప్రారంభంలో, L.V. అసూర్ యొక్క నిర్మాణ వర్గీకరణ భ్రమణ కైనెమాటిక్ జతలతో ఫ్లాట్ లివర్ మెకానిజమ్లను మాత్రమే కవర్ చేసింది. తదనంతరం, ప్రొఫెసర్ I. I. ఆర్టోబోలెవ్స్కీ ఈ వర్గీకరణను మెరుగుపరిచారు, దీనిని ఫ్లాట్ లివర్ మెకానిజమ్లకు మరియు అనువాద కైనమాటిక్ జతలతో విస్తరించారు, ఇది నిర్మాణ సమూహాల సిద్ధాంతాన్ని రూపొందించడానికి ఆధారం వేసింది, దీని ప్రకారం నిర్మాణ సమూహం తక్కువ కైనమాటిక్ జతలతో కూడిన కైనమాటిక్ గొలుసు. పరిస్థితిని సంతృప్తిపరుస్తుంది
W s.g= 3 n s.g− 2 p 1− p 2= 0 ,
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.2. లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
ఇక్కడ W s.g , n s.g – చలనశీలత మరియు నిర్మాణ సమూహం యొక్క కదిలే లింక్ల సంఖ్య
py; p 1 ,p 2 - సంబంధిత చలనశీలత యొక్క కైనమాటిక్ జతల సంఖ్య. నిర్మాణ సమూహాల లక్షణం వాటి స్థిర అనిశ్చితి
పరిమితి లింక్ల యొక్క ఉచిత మూలకాలతో నిర్మాణాత్మక సమూహం ఒక రాక్కు జోడించబడితే, అప్పుడు స్థిరంగా అనిర్దిష్ట ట్రస్ ఏర్పడుతుంది. నిర్మాణ సమూహాల యొక్క ఈ ఆస్తిని ఉపయోగించి, మెకానిజమ్స్ యొక్క నిర్మాణ, గతి మరియు శక్తి విశ్లేషణను నిర్వహించడం సౌకర్యంగా ఉంటుంది. అన్ని నిర్మాణ సమూహాలలో, ముగింపు లింక్లు ఒకే ఒక కైనమాటిక్ జతలో భాగం మరియు ఉచిత లింక్ మూలకాన్ని కలిగి ఉంటాయి. ఇటువంటి లింకులు leashes అంటారు.
ఒక పట్టీ అనేది నిర్మాణ సమూహం యొక్క చివరి లింక్, ఒక మూలకం ఒక కినిమాటిక్ జతలో భాగం మరియు లింక్ యొక్క రెండవ ఉచిత మూలకాన్ని కలిగి ఉంటుంది.
నిర్మాణాత్మక సమూహాలు సరి సంఖ్య కదిలే యూనిట్ల ద్వారా మాత్రమే ఏర్పడతాయి (Fig. 2.4 - 2.6 చూడండి). నిర్మాణ సమూహం యొక్క సంక్లిష్టత స్థాయి దాని తరగతి ద్వారా వర్గీకరించబడుతుంది. నిర్మాణ సమూహం యొక్క తరగతి లింక్లు మరియు కినిమాటిక్ జతల సంఖ్య ద్వారా నిర్ణయించబడుతుంది, అత్యంత సంక్లిష్టమైన లింక్ యొక్క శీర్షాల సంఖ్యను పరిగణనలోకి తీసుకుంటుంది. నిర్మాణ సమూహాల సంక్లిష్టత యంత్రాంగం యొక్క తరగతిని నిర్ణయిస్తుంది. దీని ప్రకారం, యంత్రాంగం యొక్క తరగతి దాని కూర్పులో చేర్చబడిన అత్యంత క్లిష్టమైన నిర్మాణ సమూహం యొక్క తరగతి ద్వారా నిర్ణయించబడుతుంది. ఒక తరగతిలో, నిర్మాణ సమూహాలు ఆర్డర్లుగా విభజించబడ్డాయి. నిర్మాణ సమూహం యొక్క క్రమం లీడ్స్ సంఖ్యకు అనుగుణంగా ఉంటుంది.
లివర్ మెకానిజమ్స్ నిర్మాణంలో, అత్యంత సాధారణ నిర్మాణ సమూహాలు ఐదవ తరగతి (Fig. 2.4) యొక్క రెండు లింకులు (2 మరియు 3) మరియు మూడు కినిమాటిక్ జతలను కలిగి ఉంటాయి. ఈ నిర్మాణ సమూహాలు రెండు శీర్షాలతో రెండు కదిలే లింక్లను కలిగి ఉంటాయి, ఇది రెండవ తరగతికి అనుగుణంగా ఉంటుంది. రెండవ తరగతి యొక్క నిర్మాణ సమూహాలు కనీసం రెండు పట్టీలను కలిగి ఉంటాయి, ఇది తరగతి లోపల అనేక ఆర్డర్ల ఉనికిని సూచిస్తుంది. ప్రస్తుతం, అత్యంత విస్తృతమైన రెండవ ఆర్డర్ యొక్క రెండవ తరగతి యొక్క నిర్మాణ సమూహాలు, ఐదు రకాల (Fig. 2.4) ఉనికిని కలిగి ఉన్న లక్షణ లక్షణం.
నిర్మాణ సమూహం యొక్క రకం దాని నిర్మాణ సూత్రం ద్వారా నిర్ణయించబడుతుంది, ఇది కినిమాటిక్ జతల రకం మరియు తరగతిపై ఆధారపడి సంకలనం చేయబడుతుంది. రెండవ ఆర్డర్ (Fig. 2.4, a) యొక్క రెండవ తరగతి యొక్క నిర్మాణ సమూహం రెండు లింకులు, రెండు లీడ్స్ ద్వారా ఏర్పడుతుంది మరియు ఐదవ తరగతి యొక్క మూడు భ్రమణ జతలను కలిగి ఉంటుంది, ఇది మొదటి రకానికి అనుగుణంగా ఉండే నిర్మాణ సూత్రం BBBని కలిగి ఉంటుంది. ఐదవ తరగతి యొక్క అనువాద జతతో తీవ్రమైన భ్రమణ కైనమాటిక్ జతలలో ఒకదానిని భర్తీ చేయడం ద్వారా రెండవ ఆర్డర్ (Fig. 2.4, b) యొక్క రెండవ తరగతి సమూహం యొక్క రెండవ రకం పొందబడుతుంది. ఫలిత సమూహం యొక్క నిర్మాణ సూత్రం GDP లేదా PVV రూపాన్ని కలిగి ఉంటుంది.
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |

2. లివర్ మెకానిజమ్స్ | |||||||||||
2.2 లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ | |||||||||||
4 ఎ 1 | |||||||||||
అన్నం. 2.4 రెండవ ఆర్డర్ యొక్క రెండవ తరగతి యొక్క నిర్మాణ సమూహాలు | |||||||||||
రెండవ ఆర్డర్ (Fig. 2.4, c) యొక్క రెండవ తరగతి యొక్క నిర్మాణ సమూహం యొక్క మూడవ రకం ERW యొక్క నిర్మాణ సూత్రాన్ని కలిగి ఉంది మరియు ఐదవ తరగతి యొక్క అనువాద జతతో సగటు భ్రమణ కైనమాటిక్ జతని భర్తీ చేయడం వలన ఏర్పడుతుంది. రెండవ ఆర్డర్ (Fig. 2.4, d) యొక్క రెండవ తరగతి యొక్క నాల్గవ రకం సమూహాలు ఐదవ తరగతి యొక్క రెండు తీవ్రమైన భ్రమణ కైనమాటిక్ జతలను అనువాద జతలతో భర్తీ చేయడం ద్వారా పొందబడతాయి, ఇది PVP యొక్క నిర్మాణ సూత్రానికి అనుగుణంగా ఉంటుంది. విపరీతమైన మరియు మధ్యస్థ భ్రమణ కైనమాటిక్ జతలలో ఒకదానిని ట్రాన్స్లేషనల్ జతలతో భర్తీ చేయడం ద్వారా, నిర్మాణ సూత్రం PPV లేదా VPPని కలిగి ఉన్న రెండవ ఆర్డర్ (Fig. 2.4, d) యొక్క రెండవ తరగతికి చెందిన ఐదవ రకం సమూహాన్ని పొందేందుకు మాకు అనుమతిస్తుంది.
సెకండ్ క్లాస్ స్ట్రక్చరల్ గ్రూపులను మాత్రమే కలిగి ఉండే మెకానిజమ్స్ సెకండ్ క్లాస్ మెకానిజమ్స్.
సిద్ధాంతపరంగా, పెద్ద తరగతుల నిర్మాణ సమూహాలు ఉన్నాయి, కానీ పాఠ్యాంశాల్లో వారి తక్కువ ప్రాబల్యం కారణంగా, మేము రెండవ తరగతి యొక్క నిర్మాణ సమూహాలకు పరిమితం చేస్తాము.
ప్రాదేశిక లివర్ మెకానిజమ్స్ యొక్క యుక్తి
ప్రాదేశిక లివర్ మెకానిజమ్స్ యొక్క అత్యంత సాధారణ ప్రతినిధులు మానిప్యులేటర్లు (Fig. 2.5, a).
మానిప్యులేటర్ అనేది మానవ చేతికి సమానమైన చర్యలను చేసే ప్రాదేశిక లివర్ మెకానిజం.
మానిప్యులేటర్లు వస్తువుల స్థానాన్ని మార్చడానికి రూపొందించబడ్డాయి. పారిశ్రామిక రోబోట్ల మానిప్యులేటర్ల లింక్లు మాత్రమే ఏర్పడతాయి
వివిధ తరగతులకు చెందిన కినిమాటిక్ జతలను కలిగి ఉన్న క్లోజ్డ్ కినిమాటిక్ చైన్లు, ఇది ఐక్యత కంటే ఎక్కువ చలనశీలతను కలిగి ఉండేలా ఇటువంటి యంత్రాంగాలను అనుమతిస్తుంది. అయినప్పటికీ, మానిప్యులేటర్లు దాని ఆపరేషన్ సమయంలో యంత్రాంగం యొక్క నిర్మాణాన్ని మార్చగల సామర్థ్యాన్ని కలిగి ఉంటాయి. సేవ ప్రయోజనం ఆధారంగా, రెండు ఎంపికలు సాధ్యమే.
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |

2. లివర్ గేర్స్
2.2. లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
అన్నం. 2.5 పారిశ్రామిక రోబోట్ మానిప్యులేటర్ మెకానిజం యొక్క రేఖాచిత్రం
మొదటి ఎంపిక: మీరు స్థిరమైన వస్తువు యొక్క స్థానాన్ని మార్చాలి (Fig. 2.5, a). సమయం యొక్క ప్రారంభ క్షణంలో, దాని స్థానాన్ని మార్చవలసిన వస్తువు స్థిరమైన విమానంలో ఉంటుంది మరియు విశ్రాంతిగా ఉంటుంది. దీని ప్రకారం, వస్తువు మరియు విమానం ఒకదానికొకటి కొన్ని కనెక్షన్లను విధిస్తాయి. అంతేకాకుండా, విమానం మరియు వస్తువు మధ్య సంబంధం దాని కైనమాటిక్ స్థితిని మార్చకపోతే, వాటిని ఒక స్థిర లింక్గా పరిగణించవచ్చు, ఇది స్టాండ్. అవుట్పుట్ లింక్ ద్వారా సందేహాస్పద వస్తువు యొక్క సంగ్రహానికి సంబంధించిన సమయ సమయంలో, ఈ లింక్ కూడా చలనం లేకుండా మారుతుంది మరియు రాక్ యొక్క మూలకం వలె పరిగణించబడాలి (Fig. 2.5, b). దీని ప్రకారం, యంత్రాంగం యొక్క నిర్మాణంలో కదిలే లింక్ల సంఖ్య ఒకటి తగ్గుతుంది మరియు ఈ క్షణం వరకు యంత్రాంగం కలిగి ఉన్న ఓపెన్ కినిమాటిక్ గొలుసు మూసివేయబడుతుంది, ఇది దాని కదలికలో తగ్గుదలకు దారితీస్తుంది. తదుపరి క్షణంలో, వస్తువును మరింత ముందుకు తరలించడానికి నిశ్చల విమానం నుండి దూరంగా చింపివేయవలసిన అవసరం ఉంటుంది. అయితే, అటువంటి చర్యను నిర్వహించడానికి, ఒక నిర్దిష్ట సమయంలో క్లోజ్డ్ కినిమాటిక్ చైన్ను కలిగి ఉన్న మానిప్యులేటర్ కనీసం ఒకదానికి సమానమైన చలనశీలతను కలిగి ఉండాలి. ఒక వస్తువు స్థిర విమానం నుండి వేరు చేయబడిన వెంటనే, అది ఈ విమానంతో గతంలో ఉన్న సంబంధాన్ని కోల్పోతుంది మరియు భవిష్యత్తులో అది అవుట్పుట్ లింక్తో కలిసి ఒక కదిలే లింక్గా పరిగణించబడాలి. అవుట్పుట్ లింక్ ద్వారా మొబిలిటీని పునరుద్ధరించే సమయంలో, మానిప్యులేటర్ యొక్క కైనమాటిక్ చైన్ మళ్లీ తెరవబడుతుంది, ఇది మెకానిజం యొక్క మునుపటి చలనశీలతకు మరియు ఇచ్చిన చట్టం ప్రకారం ఒక వస్తువును తరలించే సామర్థ్యానికి దారితీస్తుంది.
రెండవ ఎంపిక: మీరు స్థిర ఉపరితలంలో చేసిన నిర్దిష్ట ఆకారం యొక్క రంధ్రంలోకి భాగాన్ని ఇన్స్టాల్ చేయాలి. రంధ్రంలోకి భాగం యొక్క అవుట్పుట్ లింక్ యొక్క సంస్థాపనకు అనుగుణంగా ఉన్న సమయంలో, అవుట్పుట్ లింక్ కదిలే విధంగా ఉంటుంది మరియు మానిప్యులేటర్ యొక్క కినిమాటిక్ చైన్ మూసివేయబడుతుంది (Fig. 2.5, c). ఈ సందర్భంలో, కదిలే లింక్ల సంఖ్య నిర్వహించబడుతుంది మరియు మెకానిజం యొక్క కదలిక భాగం మరియు అది వ్యవస్థాపించబడిన స్థిర ఉపరితలం ద్వారా ఏర్పడిన కొత్త కినిమాటిక్ జత యొక్క కదలికకు అనులోమానుపాతంలో మారుతుంది. అవుట్పుట్ లింక్ మరియు భాగం మధ్య కనెక్షన్ రద్దు చేయబడిన సమయంలో
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.2. లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
కినిమాటిక్ గొలుసు తెరవబడుతుంది మరియు యంత్రాంగం దాని లక్షణాలను పునరుద్ధరిస్తుంది.
పరిగణించబడిన పరిస్థితుల నుండి, మానిప్యులేటర్ యొక్క కార్యాచరణను నిర్ధారించడం క్రింది షరతును నెరవేర్చినట్లయితే మాత్రమే సాధ్యమవుతుంది:
m ≥ 1.
ఇక్కడ m అనేది మానిప్యులేటర్ యొక్క యుక్తి.
యుక్తి అనేది స్థిరమైన అవుట్పుట్ లింక్తో మానిప్యులేటర్ యొక్క చలనశీలత.
ప్రాదేశిక యంత్రాంగాల యుక్తి సోమోవ్ సూత్రం ఆధారంగా పొందిన వ్యక్తీకరణ ద్వారా నిర్ణయించబడుతుంది:
m =6 n -5 p 5 -4 p 4 −3 p 3 -2 p 2 -p 1
ఇక్కడ అన్ని గుణకాలు § 2.3లో అందించబడిన వాటికి సమానంగా ఉంటాయి.
2.3 లివర్ మెకానిజమ్స్ సింథసిస్
యంత్రాంగాల సంశ్లేషణ రెండు దశల్లో జరుగుతుంది. మొదటి దశను స్ట్రక్చరల్ సింథసిస్ అంటారు, మరియు రెండవది మెట్రిక్ సింథసిస్ అని పిలుస్తారు. ప్రతి దశలో అనుసరించే సాధారణ ప్రమాణాలు: మొత్తం బరువు లక్షణాలు మరియు యంత్రాంగం యొక్క వ్యయాన్ని తగ్గించడం, అలాగే లింక్ల తయారీ సామర్థ్యాన్ని నిర్ధారించడం మరియు ఆపరేటింగ్ షరతులను నెరవేర్చడం. అయితే, ప్రతి దశ వేర్వేరు లక్ష్యాలను కలిగి ఉంటుంది.
ప్రతి దశను విడిగా వర్గీకరిద్దాం.
నిర్మాణ సంశ్లేషణఅవసరమైన లక్షణాలను కలిగి ఉన్న మెకానిజం యొక్క ఇప్పటికే ఉన్న నిర్మాణాన్ని కొత్త లేదా ఆధునీకరించే (మెరుగుపరచడం) రూపకల్పన చేసే ప్రక్రియ: ఇచ్చిన సంఖ్యలో కదలికలు, స్థానిక కదలికలు మరియు అనవసరమైన కనెక్షన్లు లేకపోవడం, కనీస లింక్లు, కినిమాటిక్ జతల ఉపయోగం ఒక నిర్దిష్ట రకం.
నిర్మాణాత్మక సంశ్లేషణ దశలో, మెకానిజం యొక్క నిర్మాణ రేఖాచిత్రం ఏర్పడుతుంది, ఇది లింక్ల సంఖ్య, కినిమాటిక్ జతల సంఖ్య, రకం మరియు చలనశీలత, అలాగే పునరావృత కనెక్షన్ల సంఖ్య మరియు స్థానిక చలనశీలతను నిర్ణయిస్తుంది. నిర్మాణాత్మక రేఖాచిత్రంలో ప్రతి పునరావృత కనెక్షన్ మరియు స్థానిక చలనశీలత యొక్క మెకానిజం యొక్క పరిచయం తప్పనిసరిగా సమర్థించబడాలి. నిర్మాణ రేఖాచిత్రాన్ని ఎన్నుకునేటప్పుడు ప్రధాన పరిస్థితులు పేర్కొన్న పారామితులు: అవసరమైన కదలికల సంఖ్య, స్థానిక కదలికలు మరియు అనవసరమైన కనెక్షన్లు లేకపోవడం, లింక్ల సంఖ్యను తగ్గించడం, ఒక నిర్దిష్ట రకం లేదా తరగతికి చెందిన కినిమాటిక్ జతలను ఉపయోగించడం. అదే సమయంలో, నిర్ణయించే పరిస్థితులు: ఇచ్చిన చలన చట్టం మరియు ఇన్పుట్ మరియు అవుట్పుట్ లింక్ల అక్షాల స్థానం. మెకానిజం యొక్క ఇన్పుట్ మరియు అవుట్పుట్ లింక్ల అక్షాలు సమాంతరంగా ఉంటే, అప్పుడు ఫ్లాట్ బ్లాక్ రేఖాచిత్రం ఎంపిక చేయబడుతుంది. ఇన్పుట్ మరియు అవుట్పుట్ లింక్ల అక్షాలు కలిసినప్పుడు లేదా క్రాస్ చేసినప్పుడు, ఉపయోగించండి
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.3. లివర్ మెకానిజమ్స్ యొక్క సంశ్లేషణ
ప్రాదేశిక పథకాన్ని ఉపయోగిస్తుంది. చాలా సందర్భాలలో, స్ట్రక్చరల్ సింథసిస్ యొక్క పని ప్రామాణిక రేఖాచిత్రాల సమితి నుండి మెకానిజం యొక్క నిర్మాణ రేఖాచిత్రాన్ని ఎంచుకోవడానికి వస్తుంది.
ఫ్లాట్ లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ సంశ్లేషణ L.V. అసూర్ యొక్క నిర్మాణ వర్గీకరణకు అనుగుణంగా నిర్వహించబడుతుంది (Fig. 2.3 చూడండి). ఒక ఉదాహరణగా, క్రాంక్-స్లైడర్ మెకానిజం (Fig. 2.6) యొక్క నిర్మాణ సంశ్లేషణను పరిగణించండి.
అన్నం. 2.6 క్రాంక్-స్లైడర్ మెకానిజం యొక్క నిర్మాణ సంశ్లేషణ పథకం
నిర్మాణాత్మక విశ్లేషణ యొక్క మొదటి పని యొక్క ఫలితం మెకానిజం యొక్క చలనశీలత ఐక్యతకు సమానం అని చూపిస్తుంది, అందువల్ల, ప్రాధమిక యంత్రాంగంగా మేము సంబంధిత చలనశీలత యొక్క లింక్ల సమూహాన్ని ఎంచుకుంటాము, వీటిలో లింక్లు ఐదవ యొక్క భ్రమణ కైనమాటిక్ జతను ఏర్పరుస్తాయి. తరగతి (Fig. 2.6, a). ఎంచుకున్న ప్రాధమిక యంత్రాంగానికి మేము 2 వ రకం (Fig. 2.6, బి) యొక్క 2 వ ఆర్డర్ యొక్క 2 వ తరగతి యొక్క లింక్ల నిర్మాణ సమూహాన్ని అటాచ్ చేస్తాము. ఈ విధంగా పొందిన యంత్రాంగం హేతుబద్ధమైన నిర్మాణాన్ని కలిగి ఉంటుంది, అనగా, దాని నిర్మాణ రేఖాచిత్రం నిర్మాణ లోపాలను కలిగి ఉండదు (Fig. 2.6, c).
తగిన తరగతి, రకం మరియు క్రమం యొక్క అవసరమైన సంఖ్యలో నిర్మాణ సమూహాలను వరుసగా చేరడం ద్వారా మరింత సంక్లిష్టమైన నిర్మాణ రేఖాచిత్రాలను పొందవచ్చు. అదే సమయంలో, అన్ని ఇతర పేర్కొన్న షరతులు కలుసుకున్నప్పుడు యంత్రాంగం యొక్క నిర్మాణం హేతుబద్ధంగా ఉందని నిర్ధారించడం అవసరం.
నిర్మాణాత్మక సంశ్లేషణ దశ యొక్క ఫలితం ఆమోదించబడిన ప్రమాణాలను సంతృప్తిపరిచే యంత్రాంగం యొక్క నిర్మాణ రేఖాచిత్రం.
మెట్రిక్ సంశ్లేషణమెకానిజం లింక్ల యొక్క ప్రాథమిక రేఖాగణిత కొలతలు మరియు పని ఉపరితల ప్రొఫైల్ల కాన్ఫిగరేషన్లను నిర్ణయించే ప్రక్రియ, ఇది ఇచ్చిన పరిస్థితులను ఉత్తమంగా సంతృప్తిపరుస్తుంది మరియు నాణ్యత సూచికల యొక్క సరైన కలయికను అందిస్తుంది.
మెట్రిక్ సంశ్లేషణ యొక్క లక్ష్యాలు:
1) ఇన్పుట్ లేదా అవుట్పుట్ లింక్ యొక్క పేర్కొన్న స్థానాల ఆధారంగా మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం యొక్క సంశ్లేషణ;
2) పేర్కొన్న రేఖాగణిత పారామితుల ప్రకారం యంత్రాంగం యొక్క కినిమాటిక్ రేఖాచిత్రం యొక్క సంశ్లేషణ;
3) అవుట్పుట్ లింక్ యొక్క కదలిక యొక్క ఇచ్చిన చట్టం ప్రకారం మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం యొక్క సంశ్లేషణ;
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.3. లివర్ మెకానిజమ్స్ యొక్క సంశ్లేషణ
4) ఇచ్చిన కినిమాటిక్ పారామితుల ప్రకారం మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం యొక్క సంశ్లేషణ: అవుట్పుట్ లింక్ యొక్క సగటు వేగం, సగటు వేగం యొక్క అసమానత యొక్క గుణకం;
5) ఒత్తిడి కోణం లేదా ప్రసార కోణం యొక్క ఇచ్చిన విలువ ఆధారంగా మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం యొక్క సంశ్లేషణ.
మెట్రిక్ సంశ్లేషణ సమస్యలకు పరిష్కారం సంశ్లేషణ యొక్క రెండు దశల ప్రమాణాలను సంతృప్తిపరిచే యంత్రాంగం యొక్క కైనమాటిక్ రేఖాచిత్రం.
కినిమాటిక్ రేఖాచిత్రం- ఇది మెకానిజం యొక్క గ్రాఫిక్ ప్రాతినిధ్యం, GOST ద్వారా సిఫార్సు చేయబడిన చిహ్నాలను ఉపయోగించి నిర్దిష్ట స్కేల్ ఫ్యాక్టర్లో తయారు చేయబడింది.
కినిమాటిక్ రేఖాచిత్రం లింక్ల సంఖ్య మరియు అవి చేసే కదలికల రకం, చలనశీలత మరియు కినిమాటిక్ జతల యొక్క తరగతి, కినిమాటిక్ గొలుసుల సంఖ్య మరియు రకం మరియు లింక్ల కొలతలు గురించి సమాచారాన్ని కలిగి ఉంటుంది.
లివర్ మెకానిజమ్స్ యొక్క మెట్రిక్ సంశ్లేషణ సమస్యలను పరిష్కరించేటప్పుడు, అవి క్రింది ప్రమాణాల ద్వారా మార్గనిర్దేశం చేయబడతాయి:
1) లింక్ల భ్రమణ షరతు - రూపొందించిన యంత్రాంగం తప్పనిసరిగా ఇన్పుట్ లేదా అవుట్పుట్ లింక్లను తిప్పడానికి అవకాశాన్ని అందించాలి
360° కంటే ఎక్కువ కోణంలో గేట్లు;
2) మెకానిజం యొక్క కొలతలపై డిజైన్ పరిమితులు - రూపొందించిన యంత్రాంగం తప్పనిసరిగా పేర్కొన్న పరిధులలో సరిపోయే మొత్తం కొలతలు కలిగి ఉండాలి;
3) పేర్కొన్న చలన చట్టం లేదా మెకానిజం యొక్క లింక్ల యొక్క నిర్దిష్ట స్థానాలను నిర్ధారించే ఖచ్చితత్వం - రూపొందించిన యంత్రాంగం తప్పనిసరిగా పేర్కొన్న చలన చట్టం లేదా లింక్ల యొక్క నిర్దిష్ట స్థానాలను అవసరమైన ఖచ్చితత్వంతో నెరవేర్చడాన్ని నిర్ధారించాలి;
4) శక్తి కారకాల బదిలీకి షరతులపై పరిమితి - రూపొందించిన యంత్రాంగం యొక్క పీడన కోణం యొక్క ప్రస్తుత విలువ అనుమతించదగిన విలువను మించకూడదు;
5) మెకానిజం యొక్క పనితీరు మరియు ఆపరేషన్ యొక్క ప్రత్యేకతలను పరిగణనలోకి తీసుకునే ఇతర పరిస్థితులు మరియు అవసరాలు.
TO యంత్రాంగాల సంశ్లేషణ పద్ధతులు విశ్లేషణ పద్ధతుల ద్వారా సంశ్లేషణను కలిగి ఉంటాయి
మరియు ప్రత్యక్ష సంశ్లేషణ పద్ధతులు (విశ్లేషణ, గ్రాఫికల్ మరియు గ్రాఫిక్-విశ్లేషణ).
గ్రాఫిక్-విశ్లేషణాత్మక పద్ధతులను ఉపయోగించి యంత్రాంగాల మెట్రిక్ సంశ్లేషణ ఒక నిర్దిష్ట స్థాయి కారకంలో నిర్వహించబడుతుంది.
స్కేల్ ఫ్యాక్టర్- ఇది ఏదైనా నిజమైన సంబంధం-
ఇచ్చిన విలువ l, మీటర్లలో తీసుకోబడింది, సెగ్మెంట్ l యొక్క పొడవు, మిల్లీమీటర్లలో కొలుస్తారు మరియు ఈ విలువను కైనమాటిక్ రేఖాచిత్రంలో భాగంగా వర్ణిస్తుంది.
పొడవు స్కేల్ అనేది మిల్లీమీటర్లలోని ఏదైనా విలువను మీటర్లలోని వాస్తవ విలువకు వర్ణించే సెగ్మెంట్ యొక్క పొడవు యొక్క నిష్పత్తి.
స్కేల్ అనేది ఒక ప్రామాణిక పరిమాణం, దీని విలువలు GOST యొక్క నిబంధనల ద్వారా ఖచ్చితంగా నియంత్రించబడతాయి. "ఇంజనీరింగ్ గ్రాఫిక్స్" అనే క్రమశిక్షణ యొక్క నిబంధనల నుండి వాస్తవ స్థాయి అని తెలుస్తుంది
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |

2. లివర్ గేర్స్
2.3. లివర్ మెకానిజమ్స్ యొక్క సంశ్లేషణ
1×1 ధరించి, మరియు విస్తరణ ప్రమాణాలు మరియు తగ్గింపు ప్రమాణాల శ్రేణి ఉన్నాయి. స్కేల్ ఫ్యాక్టర్ అనేది స్కేల్ యొక్క పరస్పరం మరియు ఇది ప్రామాణిక విలువ కాదు. అవసరమైన సమస్యలను పరిష్కరించడానికి పేర్కొన్న పరిస్థితులు మరియు లక్ష్యాలను బట్టి స్కేల్ ఫ్యాక్టర్ యొక్క విలువలు ఏకపక్షంగా తీసుకోబడతాయి.
μl =OA l OA,
ఇక్కడ l OA అనేది క్రాంక్ యొక్క వాస్తవ పొడవు; OA అనేది ఏకపక్ష విభాగం.
2.4 లివర్ మెకానిజమ్స్ యొక్క నాణ్యత సూచికలు
మెట్రిక్ సంశ్లేషణ యొక్క పరిమితులు మరియు షరతులు నాణ్యత సూచికల విలువలను ఏర్పరుస్తాయి, దీని సహాయంతో లివర్ మెకానిజమ్స్ యొక్క నాణ్యతను అంచనా వేస్తారు.
లివర్ మెకానిజమ్స్ యొక్క గుణాత్మక సూచికలు: సమర్థత η;
మెకానిజం స్ట్రోక్ H;
సగటు వేగం k యొక్క అసమానత యొక్క గుణకం; ఒత్తిడి కోణంϑ; ప్రసార కోణంμ.
సమర్థతη పరిమాణం లేని పరిమాణం, ha-
మెకానిజం ద్వారా ఉపయోగపడే మొత్తం శక్తి మొత్తాన్ని వర్గీకరిస్తుంది. § 1.4లో గుర్తించినట్లుగా, మెకానిజం యొక్క సామర్థ్యం ఎల్లప్పుడూ ఒకటి కంటే తక్కువగా ఉంటుంది, ఎందుకంటే చలన పరివర్తన ప్రక్రియ కైనమాటిక్ జతలలో రాపిడి ఉండటం వల్ల యాంత్రిక శక్తి యొక్క నష్టాలతో కూడి ఉంటుంది. సమర్ధత విలువ ఐక్యతకు దగ్గరగా ఉంటుంది, నష్టాలు తక్కువగా ఉంటాయి, అందువల్ల, లివర్ మెకానిజం యొక్క అధిక నాణ్యత.
ఫ్లాట్ లివర్ మెకానిజమ్స్ యొక్క పని ప్రాంతం సాధారణంగా అవుట్పుట్ లింక్ యొక్క కదలిక పరిధి ద్వారా అంచనా వేయబడుతుంది, దీనిని మెకానిజం యొక్క స్ట్రోక్ అని పిలుస్తారు.
మెకానిజం యొక్క స్ట్రోక్ అనేది అవుట్పుట్ లింక్ యొక్క ప్రారంభ మరియు చివరి స్థానాల మధ్య దూరం.
క్రాంక్-స్లైడర్ (Fig. 2.7, a), సైన్ (Fig. 2.7, d) మరియు టాంజెన్షియల్ (Fig. 2.7, d) మెకానిజమ్స్ కోసం, స్ట్రోక్ ఈ పరామితి యొక్క నిర్వచనం ప్రకారం లెక్కించబడుతుంది మరియు హింగ్డ్ (Fig. 2.7) కోసం , బి) మరియు రాకర్ (Fig. 2.7, c) మెకానిజమ్స్, ఈ పరామితి యొక్క విలువను వ్యక్తీకరణ ద్వారా కనుగొనవచ్చు
n = ψ l,
యంత్రాంగాలు మరియు యంత్రాల సిద్ధాంతం. పాఠ్యపుస్తకం భత్యం |
2. లివర్ గేర్స్
2.4.
ఇక్కడ l ,ψ – అవుట్పుట్ లింక్ స్పాన్ యొక్క పొడవు మరియు కోణం, రాడ్.
రాకర్ ఆర్మ్ స్వింగ్ కోణంలేదా రాకర్ ψ అనేది రాకర్ ఆర్మ్ లేదా రాకర్ యొక్క ప్రారంభ మరియు చివరి స్థానాల మధ్య కోణం (Fig. 2.7, b, c).
చాలా ఫ్లాట్ లివర్ మెకానిజమ్స్ ఆపరేషన్ యొక్క ఆవర్తన స్వభావాన్ని కలిగి ఉంటాయి, అనగా, ఒక నిర్దిష్ట వ్యవధి తర్వాత, యంత్రాంగంలో సంభవించే అన్ని ప్రక్రియలు పునరావృతమవుతాయి. ఈ సందర్భంలో, ఏదైనా యంత్రాంగం యొక్క ఆపరేటింగ్ చక్రం పని మరియు నిష్క్రియ దశలుగా విభజించబడింది. పవర్ స్ట్రోక్ దశలో, మెకానిజం యొక్క సేవా ప్రయోజనం నిర్వహించబడుతుంది మరియు నిష్క్రియ దశ కదలిక చక్రాన్ని పూర్తి చేయడానికి మరియు లింక్ల పని ఉపరితలాల నుండి అవశేష ఒత్తిడిని తగ్గించడానికి ఉద్దేశించబడింది. పని మరియు పనిలేకుండా స్ట్రోక్ల కోసం గడిపిన సమయ నిష్పత్తి సాధారణంగా సగటు వేగం అసమానత గుణకం ఉపయోగించి అంచనా వేయబడుతుంది.
సగటు వేగం అసమానత గుణకం గుణకం
నిష్క్రియ సమయం T x.x మరియు పని స్ట్రోక్ సమయం T r.x నిష్పత్తిని వర్గీకరిస్తుంది:
T x.x | |||||
ఇక్కడ θ అనేది మెకానిజం యొక్క తీవ్ర స్థానాల్లో కనెక్ట్ చేసే రాడ్ యొక్క స్థానాల మధ్య కోణం.
ఎ, బి | ఎ, బి | ఎ, బి |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
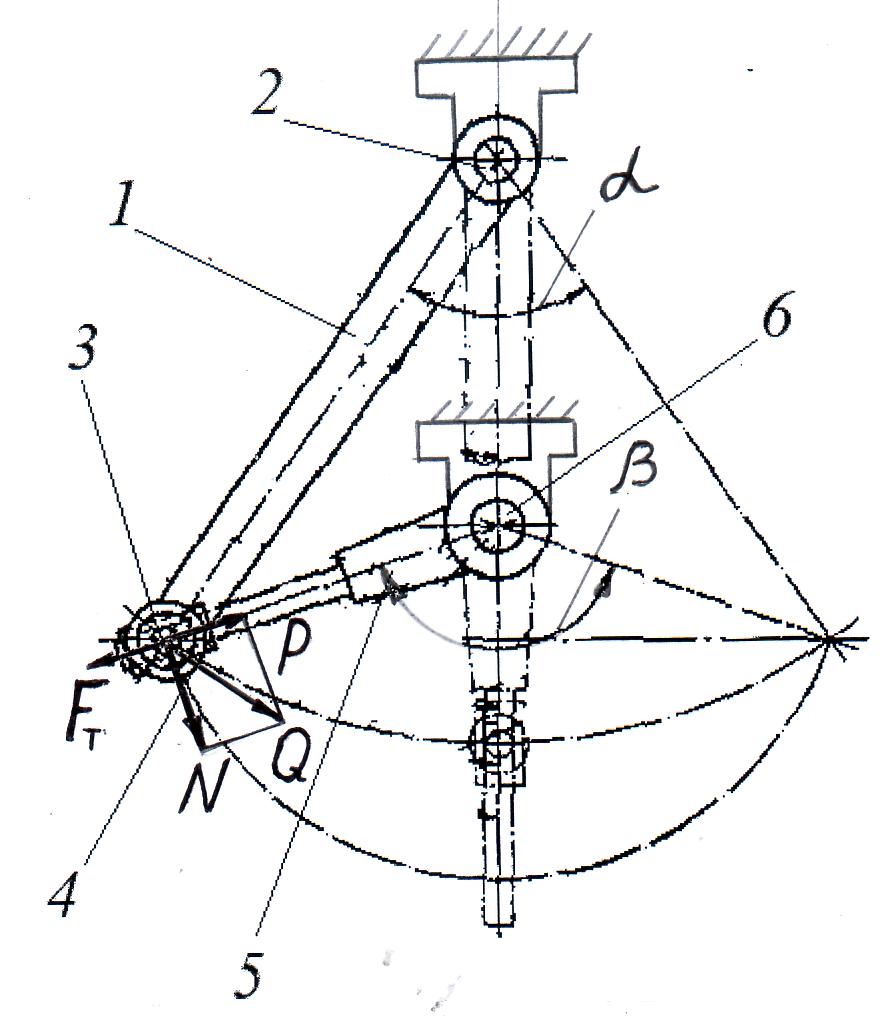
అన్నం. 2.8 సాధారణ లివర్ మెకానిజమ్స్ యొక్క పీడన కోణాలను నిర్ణయించే పథకాలు ఫ్లాట్ లివర్ మెకానిజమ్ల లింక్ల మధ్య శక్తి కారకాల ప్రసార నాణ్యతను అంచనా వేయడానికి, పీడన కోణం ϑ ఉపయోగించబడుతుంది. పీడన కోణం అనేది క్రియాశీల శక్తి వెక్టార్ P a మధ్య తీవ్రమైన కోణం, మునుపటి లింక్ వైపు నుండి నటన, మరియు దాని అప్లికేషన్ యొక్క పాయింట్ యొక్క వేగం వెక్టార్ (Fig. 2.8). పీడన కోణం యొక్క విలువ లింక్ల మధ్య శక్తుల బదిలీకి పరిస్థితులను ఏర్పరుస్తుంది, మెకానిజం Q యొక్క చోదక శక్తి యొక్క పరిమాణాన్ని నిర్ణయిస్తుంది: Q = P a cos(ϑ ) . వ్యక్తీకరణ యొక్క విశ్లేషణ నుండి, పీడన కోణం యొక్క విలువలో తగ్గుదల చోదక శక్తి యొక్క విలువలో పెరుగుదలకు దారి తీస్తుంది మరియు ఒత్తిడి కోణంలో పెరుగుదల, తదనుగుణంగా, ఈ శక్తిని తగ్గిస్తుంది. లివర్ మెకానిజమ్స్ యొక్క ఆపరేషన్ సమయంలో, ఒత్తిడి కోణం ఎల్లప్పుడూ ϑ ≤ 90 °. ఒత్తిడి కోణం ϑ > 90° ఉన్నప్పుడు, మెకానిజమ్స్లో జామింగ్ లేదా సెల్ఫ్ బ్రేకింగ్ జరగవచ్చు. స్వీయ-బ్రేకింగ్ లేదా జామింగ్ అనేది ఒక యంత్రాంగం యొక్క స్థితి చోదక శక్తి యొక్క ఏదైనా ఏకపక్షంగా పెద్ద విలువ వద్ద లింక్లు కదలకుండా చేసే పీడన కోణాల విలువలతో పాటు. అటువంటి పరిస్థితులను తొలగించడానికి, మెకానిజమ్లను సంశ్లేషణ చేసేటప్పుడు, పీడన కోణాల [ϑ] యొక్క అనుమతించదగిన విలువలు పేర్కొనబడ్డాయి, ఈ క్రింది సిఫార్సుల ద్వారా మార్గనిర్దేశం చేయబడతాయి: కేవలం భ్రమణ కైనమాటిక్ జతలను మాత్రమే రూపొందించే యంత్రాంగాల కోసం, అనుమతించదగిన పీడన కోణం పరిధిలో ఉంటుంది.
2. లివర్ గేర్స్ 2.4. లివర్ మెకానిజమ్స్ యొక్క గుణాత్మక సూచికలు [ϑ ] = 45− 60°, మరియు భ్రమణ మరియు అనువాద కైనమాటిక్ జతల కలయికను కలిగి ఉండే యంత్రాంగాల కోసం, [ϑ ] = 30− 45°. ఒత్తిడి కోణం విలువలు [ϑ ] = 90° వద్ద, మెకానిజం "డెడ్" స్థానాలు అని పిలవబడేది, ఇది స్టాటిక్స్లో లింక్ల జామింగ్కు దారితీస్తుంది; చలనంలో (డైనమిక్స్), మెకానిజం అటువంటి స్థానాలను అధిగమిస్తుంది గతి శక్తి యొక్క అదనపు వాల్యూమ్. కీలు యంత్రాంగం యొక్క నాణ్యతను అంచనా వేయడానికి, ఒత్తిడి కోణంతో పాటు, ప్రసార కోణం μ ఉపయోగించబడుతుంది (Fig. 2.8, b). ట్రాన్స్మిషన్ కోణం అనేది కనెక్ట్ చేసే రాడ్ మరియు కీలు మెకానిజం యొక్క రాకర్ ఆర్మ్ యొక్క అక్షాల సాపేక్ష స్థానాన్ని నిర్ణయించే కోణం. ప్రసార కోణాలు మరియు పీడనం యొక్క విలువలు పరస్పరం సంబంధం కలిగి ఉంటాయి: ϑ+μ =90°. వ్యక్తీకరణ యొక్క విశ్లేషణ పీడన కోణంలో పెరుగుదల ప్రసార కోణంలో తగ్గుదలకు దారితీస్తుందని మరియు దీనికి విరుద్ధంగా, ప్రసార కోణం యొక్క విలువలలో పెరుగుదల ఒత్తిడి కోణంలో తగ్గుదలకు దారితీస్తుందని చూపిస్తుంది. ఒత్తిడి మరియు ప్రసార కోణాల విలువలలో ఏకకాలంలో పెరుగుదల లేదా తగ్గుదల అసాధ్యం. కోణాలలో ఒకటి సున్నాకి సమానంగా ఉన్నప్పుడు, రెండవ కోణం యొక్క విలువ గరిష్ట స్థాయికి చేరుకుంటుంది, అనగా 90° ..
|
అగ్రగామిలింక్ అనేది దానికి వర్తించే బాహ్య శక్తుల పని సానుకూలంగా ఉండే లింక్, బానిస- ప్రతికూల లేదా సున్నాకి సమానం.
అంజీర్లో. మూర్తి 13.2 నాలుగు-ఉమ్మడి యంత్రాంగాన్ని చూపుతుంది. ఇన్పుట్ లింక్కి 1 ఈ యంత్రాంగానికి డ్రైవింగ్ క్షణం వర్తించబడుతుంది ఎం డి , అవుట్పుట్ లింక్కి 3 - ప్రతిఘటన యొక్క క్షణం ఎం c3. డిజైన్ దశలో, అంజీర్లోని లింక్ల ద్రవ్యరాశి మరియు జడత్వం యొక్క క్షణాలు. 13.2 నిర్వచించబడ్డాయి, కాబట్టి నడిచే లింక్పై పనిచేసే చోదక శక్తి ప్రతిచర్య ఎఫ్ 32 లైన్ వెంట దర్శకత్వం వహించారు సూర్యుడు , లింక్పై దాని అప్లికేషన్ పాయింట్ వేగం 3 - వి సి పంపాను వైపు 3 లింక్కు లంబంగా 3 . కార్నర్ 32 వెక్టర్స్ మధ్య ఎఫ్ 32 మరియు వి సి - భ్రమణ జతలో ఒత్తిడి కోణం తో . ఈ కోణం పెరిగేకొద్దీ, శక్తి యొక్క టాంజెన్షియల్ భాగం ఎఫ్ t 32 , లింక్ భ్రమణాన్ని ప్రోత్సహిస్తోంది 3 దిశలో 3 , తగ్గుతుంది, మరియు సాధారణ ఎఫ్ n 32 , ఇది కదలికను ప్రభావితం చేయదు, కానీ లింక్ను మాత్రమే వైకల్యం చేస్తుంది (కంప్రెస్ చేస్తుంది). 3 , పెరుగుతుంది. అంటే, పీడన కోణం పెరుగుదలతో, గేర్బాక్స్లో శక్తుల ప్రసారం కోసం పరిస్థితులు మరింత దిగజారిపోతాయి. నిజమైన గేర్బాక్స్లలో ఎల్లప్పుడూ ఘర్షణ ఉంటుంది కాబట్టి, గేర్బాక్స్లోని పీడన కోణం యొక్క నిర్దిష్ట విలువలో స్వీయ-బ్రేకింగ్ లేదా జామింగ్ సాధ్యమవుతుంది.
స్వీయ-లాకింగ్ లేదా జామింగ్- ఇది గేర్బాక్స్లలో ఒకదానిలో ఒత్తిడి కోణాలను పెంచడం ఫలితంగా, చోదక శక్తి యొక్క ఏకపక్షంగా పెద్ద విలువతో యంత్రాంగం యొక్క కదలిక అసాధ్యం అయినప్పుడు ఇది యంత్రాంగం యొక్క స్థితి. తరచుగా, శక్తి ప్రసారం యొక్క పరిస్థితులను వర్గీకరించడానికి, శక్తి పెరుగుదల గుణకం ఉపయోగించబడుతుంది (ఘర్షణను పరిగణనలోకి తీసుకోకుండా)
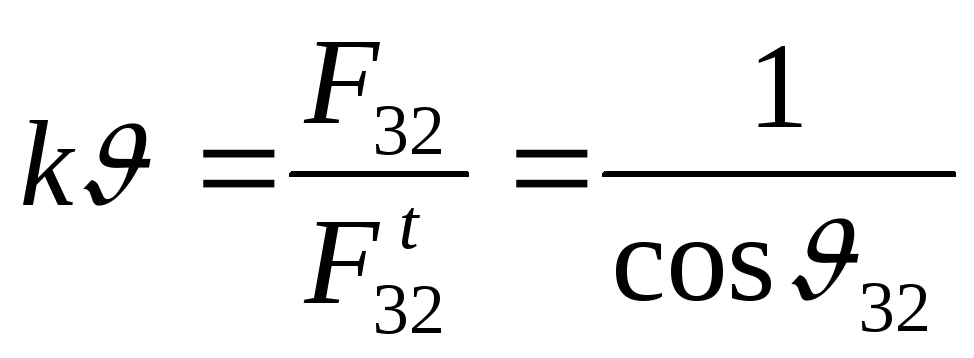
|
|

నిజమైన యంత్రాంగాలలో ఎల్లప్పుడూ ఘర్షణ ఉంటుంది కాబట్టి, పీడన కోణాలలో జామింగ్ జరుగుతుంది < 90 . లెక్కించేటప్పుడు, శక్తి పెరుగుదల గుణకం పేర్కొనబడింది (ఉదాహరణకు కె = 2 ) మరియు అనుమతించదగిన ఒత్తిడి కోణాన్ని నిర్ణయించండి [ ] . ప్రాథమిక గణనల కోసం ఇది భ్రమణ జతలతో మాత్రమే యంత్రాంగాలకు అంగీకరించబడుతుంది [ ] = 45 - 60 , ప్రగతిశీల నియంత్రణ పాయింట్ల సమక్షంలో [ ] = 30 - 45 . మెకానిజం యొక్క "చనిపోయిన" స్థానాలు అని పిలవబడే వాటిలో ఒత్తిడి కోణాలు ఉన్నాయని గమనించాలి = 90 . స్థిరమైన పరిస్థితులలో, యంత్రాంగం ఈ స్థితిలో జామ్ కావచ్చు; డైనమిక్స్లో, కదిలే భాగాల ద్వారా నిల్వ చేయబడిన గతి శక్తిని ఉపయోగించి యంత్రాంగం ఈ స్థానాల ద్వారా కదులుతుంది.
సగటు వేగం యొక్క అసమానత యొక్క గుణకం యొక్క భావన
అవుట్పుట్ లింక్ యొక్క సగటు వేగం యొక్క అసమానత యొక్క గుణకం కె రిటర్న్ స్ట్రోక్లో కదలిక సమయంలో అవుట్పుట్ లింక్ యొక్క సగటు వేగం యొక్క నిష్పత్తి 3వది ఓహ్ మరియు నేరుగా ముందుకు 3వ
|
|
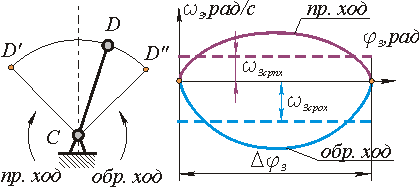
ఎక్కడ 

t ఓహ్ మరియు T ph - రివర్స్ టైమ్ మరియు ఫార్వార్డ్ టైమ్ వరుసగా.
వర్కింగ్ లేదా ఫార్వర్డ్ స్ట్రోక్లో మెకానిజం యొక్క అవుట్పుట్ లింక్పై లోడ్ ఐడిల్ లేదా రివర్స్ స్ట్రోక్లోని లోడ్ కంటే చాలా ఎక్కువగా ఉండే సాంకేతిక యంత్రాలను రూపకల్పన చేసేటప్పుడు, ఫార్వర్డ్ స్ట్రోక్లో అవుట్పుట్ లింక్ వేగం తక్కువగా ఉండటం మంచిది. రివర్స్ ఒకటి కంటే. నిష్క్రియ సమయాన్ని తగ్గించడానికి, రివర్స్ స్ట్రోక్ సమయంలో వేగాన్ని పెంచడం కూడా అవసరం. అందువల్ల, మెట్రిక్గా మెకానిజంను సంశ్లేషణ చేస్తున్నప్పుడు, సగటు వేగం అసమానత యొక్క ఇచ్చిన గుణకాన్ని అందించే లింక్ పరిమాణాలను ఎంచుకోవడం తరచుగా అవసరం.
అలియుషిన్ యు.ఎ.
హింగ్డ్ లివర్ మెకానిజమ్స్ యొక్క నిర్మాణ విశ్లేషణ
(స్వతంత్ర పని చేయడానికి ప్రాథమిక అంశాలు మరియు ఉదాహరణ)
హింగ్డ్-లివర్ మెకానిజమ్ల అధ్యయనంలో నిర్మాణ, గతి మరియు డైనమిక్ విశ్లేషణలు ఉంటాయి. నిర్మాణాత్మక విశ్లేషణలో కదిలే లింకులు మరియు కినిమాటిక్ జతల (KP), వాటి వర్గీకరణ, విమానం మరియు ప్రాదేశిక యంత్రాంగానికి స్వేచ్ఛ యొక్క డిగ్రీల సంఖ్యను నిర్ణయించడం, అనవసరమైన కనెక్షన్లను తొలగించడం (ప్రాదేశిక సమూహాల కోసం) మరియు అసూర్ ప్రకారం నిర్మాణాన్ని "హేతుబద్ధీకరించడం" వంటివి ఉంటాయి. రిడెండెంట్ మొబిలిటీతో సర్క్యూట్ల యొక్క సాధ్యమైన వైవిధ్యాల యొక్క శక్తి వివరణతో. మెకానిజం యొక్క నిర్మాణం క్రియాత్మకంగా సంబంధిత మూలకాల (లింకులు, లింక్ల సమూహాలు లేదా ప్రామాణిక మెకానిజమ్లు) మరియు వాటి మధ్య సంబంధాలు (కదిలే గేర్బాక్స్లు లేదా స్థిర జాయింట్లు) ద్వారా నిర్ణయించబడుతుంది. లింక్లు, గేర్బాక్స్లు మరియు స్ట్రక్చరల్ గ్రూపుల స్థాయిలో మెకానిజం యొక్క నిర్మాణం దాని నిర్మాణ రేఖాచిత్రంలో ప్రదర్శించబడుతుంది, ఇది ఈ మూలకాలను కనెక్ట్ చేసే కినిమాటిక్ జతల రకం గురించి అదనపు సమాచారంతో కినిమాటిక్ నుండి భిన్నంగా ఉంటుంది.
1. నిర్మాణ విశ్లేషణ యొక్క ప్రాథమిక అంశాలు.
1.1 మెకానిజం యొక్క మొబిలిటీ (స్వేచ్ఛ స్థాయిల సంఖ్య). - మెకానిజం యొక్క అన్ని ఇతర లింక్ల స్థానాన్ని (విమానంలో లేదా అంతరిక్షంలో) ప్రత్యేకంగా నిర్ణయించే ప్రముఖ లింక్ల సంఖ్య (స్వతంత్ర సాధారణీకరించిన కోఆర్డినేట్లు). 1.2. స్థానిక చలనశీలత - మెకానిజం యొక్క వ్యక్తిగత లింక్ల చలనశీలత, ఇది అవసరమైన సంఖ్యలో డ్రైవింగ్ లింక్లను ప్రభావితం చేయదు, కానీ ఇతర ప్రయోజనాల కోసం లింక్ల యొక్క సాధ్యమైన స్థానభ్రంశాలను అనుమతిస్తుంది, ఉదాహరణకు, క్యామ్ మెకానిజంలో పషర్కు కీలకంగా కనెక్ట్ చేయబడిన రోలర్ యొక్క భ్రమణం అనుమతిస్తుంది. కామ్ ఉపరితలంపై రోలింగ్ రాపిడి ద్వారా స్లైడింగ్ ఘర్షణను భర్తీ చేయడం.1.3 కనెక్షన్ - శరీరం యొక్క కదలికపై విధించిన పరిమితి (మెకానిజం లింక్).
1.4 హామీ నిర్మాణ సమూహాలు. ఏదైనా యంత్రాంగాన్ని ఒకటి లేదా అంతకంటే ఎక్కువ రెండు-లింక్ (ప్రాధమిక) మెకానిజమ్లు మరియు ఒకటి లేదా అంతకంటే ఎక్కువ అసూర్ గ్రూపుల కలయికగా సూచించవచ్చు. అసూర్ స్ట్రక్చరల్ గ్రూపులు అనేది ఒక మెకానిజం యొక్క కదిలే లింక్ల ద్వారా మాత్రమే ఏర్పడిన కినిమాటిక్ గొలుసులు, వీటిలో చలనశీలత (విమానంలో) సున్నా. అసూర్ సమూహం యొక్క నిర్మాణ సూత్రంఇక్కడనుంచి
![]() ,
,
ఎక్కడ  లింకుల సంఖ్య;
లింకుల సంఖ్య;  - నిర్మాణ సమూహంలో తక్కువ CP ల సంఖ్య. అన్ని సంఖ్యలు తప్పనిసరిగా పూర్ణాంకాలుగా ఉండాలి కాబట్టి, నిర్మాణ సమూహంలోని లింక్ల సంఖ్య ఎల్లప్పుడూ సమానంగా ఉండాలి మరియు తక్కువ CPల సంఖ్య తప్పనిసరిగా 3కి గుణకారంగా ఉండాలి. 1.4.1 అసూర్ గ్రూప్
- జీరో మొబిలిటీతో ఫ్లాట్ కినిమాటిక్ చైన్లు. 1.4.2.
తరగతి
అసూర్ స్ట్రక్చరల్ గ్రూప్ అనేది ఏర్పడిన క్లోజ్డ్ లూప్లో చేర్చబడిన కైనమాటిక్ జతల సంఖ్య అంతర్గత
సమూహం యొక్క కైనమాటిక్ జతలు. 1.4.3.
ఆర్డర్ చేయండి
Assur సమూహం అది స్టాండ్, ప్రారంభ మెకానిజం లేదా ఇతర సమూహాలకు జోడించబడిన కినిమాటిక్ జతల సంఖ్యను నిర్ణయిస్తుంది. 1.4.4.
పట్టీలు
అసూర్ నిర్మాణ సమూహాలను ఈ సమూహం జతచేయబడిన మెకానిజం మూలకాల యొక్క అనలాగ్లు అంటారు. అవి సాధారణంగా ఉచిత CPల నుండి విస్తరించే చుక్కల పంక్తులుగా చూపబడతాయి (Fig. 1 చూడండి). ఈ కాన్సెప్ట్ ఇచ్చారు ఆర్డర్సమూహం సంఖ్యను నిర్ణయిస్తుంది పట్టీలు, ఇది స్టాండ్, ప్రారంభ మెకానిజం లేదా ఇతర అసూర్ సమూహాలకు జోడించబడింది.
- నిర్మాణ సమూహంలో తక్కువ CP ల సంఖ్య. అన్ని సంఖ్యలు తప్పనిసరిగా పూర్ణాంకాలుగా ఉండాలి కాబట్టి, నిర్మాణ సమూహంలోని లింక్ల సంఖ్య ఎల్లప్పుడూ సమానంగా ఉండాలి మరియు తక్కువ CPల సంఖ్య తప్పనిసరిగా 3కి గుణకారంగా ఉండాలి. 1.4.1 అసూర్ గ్రూప్
- జీరో మొబిలిటీతో ఫ్లాట్ కినిమాటిక్ చైన్లు. 1.4.2.
తరగతి
అసూర్ స్ట్రక్చరల్ గ్రూప్ అనేది ఏర్పడిన క్లోజ్డ్ లూప్లో చేర్చబడిన కైనమాటిక్ జతల సంఖ్య అంతర్గత
సమూహం యొక్క కైనమాటిక్ జతలు. 1.4.3.
ఆర్డర్ చేయండి
Assur సమూహం అది స్టాండ్, ప్రారంభ మెకానిజం లేదా ఇతర సమూహాలకు జోడించబడిన కినిమాటిక్ జతల సంఖ్యను నిర్ణయిస్తుంది. 1.4.4.
పట్టీలు
అసూర్ నిర్మాణ సమూహాలను ఈ సమూహం జతచేయబడిన మెకానిజం మూలకాల యొక్క అనలాగ్లు అంటారు. అవి సాధారణంగా ఉచిత CPల నుండి విస్తరించే చుక్కల పంక్తులుగా చూపబడతాయి (Fig. 1 చూడండి). ఈ కాన్సెప్ట్ ఇచ్చారు ఆర్డర్సమూహం సంఖ్యను నిర్ణయిస్తుంది పట్టీలు, ఇది స్టాండ్, ప్రారంభ మెకానిజం లేదా ఇతర అసూర్ సమూహాలకు జోడించబడింది. 
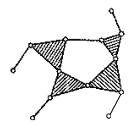
అన్నం. 1. అసూర్ డబుల్ లీడ్ గ్రూపులు.
అసూర్ స్ట్రక్చరల్ గ్రూపులు II-VI తరగతుల ఉదాహరణలను టేబుల్ 1 చూపిస్తుంది. ఉచిత కైనమాటిక్ జతలు అవుట్గోయింగ్ లీడ్స్తో గుర్తించబడతాయి - చుక్కల పంక్తులు, అంజీర్. 1.
టేబుల్ 1.
| సమూహం | ఆర్డర్ చేయండి |
|||
| IIతరగతి | ||||
| IIIతరగతి |
|
|||
| IVతరగతి | ||||
| వితరగతి |
|
| ||
| VIతరగతి |
|
| ||

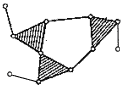


2. ఆరు-లింక్ మెకానిజం యొక్క నిర్మాణ విశ్లేషణను నిర్వహించడానికి ఒక ఉదాహరణ, దీని యొక్క గతి రేఖాచిత్రం అంజీర్లో చూపబడింది. 2.
అన్నం. 2. మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం
2.1 స్థిర లింక్ను ఎంచుకోవడం- రాక్ "0", దీనిలో A మరియు D కీలు యొక్క స్థిర అక్షాలు స్థిరంగా ఉంటాయి, అలాగే స్లైడర్ గైడ్లు. 2.2 మేము సంఖ్య(అరబిక్ సంఖ్యలు) మరియు కదిలే భాగాలను వర్గీకరించండి.తదుపరి డైనమిక్ విశ్లేషణ యొక్క సౌలభ్యం కోసం, శక్తి వనరు (ప్రధాన లింక్) నుండి అత్యంత సుదూర వినియోగదారులకు వరుసగా లింక్లను నంబర్ చేయడం మంచిది. పరిశీలనలో ఉన్న యంత్రాంగంలో ఐదు కదిలే లింకులు ఉన్నాయి: లింక్ 1 - క్రాంక్, 360 0 పూర్తి భ్రమణంతో భ్రమణ కదలికను చేస్తుంది; 2 మరియు 4 - కనెక్ట్ చేసే రాడ్లు, కదిలే అక్షాలకు సంబంధించి భ్రమణంతో విమానం-సమాంతర కదలికను నిర్వహించండి (కాలక్రమేణా MCS యొక్క స్థానం మారుతుంది); లింక్ 3 - రాకర్ ఆర్మ్, స్థిర అక్షం Dకి సంబంధించి ఓసిలేటరీ మోషన్ నిర్వహిస్తుంది; లింక్ 5 - స్లయిడర్, స్థిర గైడ్ల వెంట పరస్పర కదలికను నిర్వహిస్తుంది. 2.3 మేము కైనమాటిక్ జతలను వర్గీకరిస్తాము(KP), ఇది ప్రక్కనే ఉన్న లింక్ల సాపేక్ష కదలికను నిర్ణయిస్తుంది. కొన్ని పాఠ్యపుస్తకాలలో, కైనమాటిక్ జంటలు రోమన్ సంఖ్యలతో లెక్కించబడ్డాయి, ఉదాహరణకు, బొమ్మలు 2, 3 మరియు 5లో I, II, III, IV, V, VI మరియు VII. అయితే, లోపాల యొక్క తక్కువ సంభావ్యతతో, ఇది మరింత సౌకర్యవంతంగా ఉంటుంది. KP యొక్క వర్గీకరణను టేబుల్ 2 రూపంలో ప్రదర్శించండి, దీనిలో రోమన్ సంఖ్యకు బదులుగా సంఖ్యలు సంబంధిత కైనమాటిక్ జతలతో అనుసంధానించబడిన ప్రక్కనే ఉన్న లింక్లను సూచించే సూచికలతో క్యాపిటల్ లాటిన్ అక్షరాలను ఉపయోగిస్తాయి.పట్టిక 2.
| ప్రక్కనే ఉన్న లింక్ల సంఖ్యలు | డిజిటల్ KP కోడ్ | నియంత్రణ ప్యానెల్ రకం | అంజీర్లో హోదా. 2, a, 2, b మరియు టెక్స్ట్లో |
|
| 2&4 (లేదా 3&4) | C 24 (లేదా C 34) |
|||
ఎక్కడ n- కదిలే భాగాల సంఖ్య ( n = 5), p 1
- ఒకే చలనశీలత కలిగిన తక్కువ కైనమాటిక్ జతల సంఖ్య ( p 1
=7
) మెకానిజంలో ఎక్కువ (విమానంలో రెండు చలనశీలతతో) కైనమాటిక్ జతలు లేవు, p 2
=0
. మెకానిజం యొక్క స్వేచ్ఛ యొక్క మొత్తం డిగ్రీల సంఖ్య 1, అనగా, మెకానిజం యొక్క ఆపరేషన్ కోసం, ఒక డ్రైవింగ్ లింక్ సరిపోతుంది, దీనిని AB క్రాంక్గా ఉపయోగించవచ్చు. 2.5 మేము Assur నిర్మాణ సమూహాలను గుర్తిస్తాము.అసూర్ స్ట్రక్చరల్ గ్రూపులను (స్వేచ్ఛ W = 0 డిగ్రీల సంఖ్యతో) గుర్తించడానికి, మేము మెకానిజమ్ను లీడింగ్ లింక్ నుండి చాలా దూరం నుండి ప్రారంభించి సరళమైన మాడ్యూల్స్గా విభజిస్తాము. దీనికి ముందు, ఒక పాయింట్ వద్ద, ప్రత్యేకించి, 2, 3 మరియు 4 లింక్ల మధ్య, విడిగా, ఉదాహరణకు, అంజీర్లో చూపిన విధంగా, కైనమాటిక్ రేఖాచిత్రాలపై (Fig. 2 చూడండి) కలిపి జతలను ప్రదర్శించడం మంచిది. 3, a లేదా అంజీర్లో. 3, బి. ఈ రెండు పథకాలు, సాధారణంగా చెప్పాలంటే, 4 మరియు 5 లింక్ల కైనమాటిక్స్లో (2, 3 మరియు 4 లింక్లను అనుసంధానించే అతుకుల అక్షాలు అంతరిక్షంలో సమలేఖనం చేయకపోతే) మరియు కైనమాటిక్ ద్వారా ప్రసారం చేయబడిన శక్తులలో వేర్వేరు విధానాలకు అనుగుణంగా ఉంటాయి. 2 మరియు 3 లింక్ల మధ్య జతలు. మేము సూచించిన లింక్లను అనుసంధానించే భ్రమణ కైనమాటిక్ జతల అక్షాలను మిళితం చేస్తే, కైనమాటిక్ పరిస్థితులు నిస్సందేహంగా నిర్ణయించబడతాయి, అయితే ఇందులో పాల్గొనని నిష్క్రియ శక్తుల ప్రదర్శన కారణంగా ప్రసార శక్తులు మారవచ్చు. ప్రతి క్షణంలో అవి ఈ అక్షాల కదలిక వేగానికి ఆర్తోగోనల్గా నిర్దేశించబడతాయి (ఆర్తోగోనల్ వెక్టర్స్ యొక్క స్కేలార్ ఉత్పత్తి 0కి సమానం!) కారణంగా కనెక్ట్ చేయబడిన ప్రక్కనే ఉన్న లింక్ల మధ్య శక్తి బదిలీ 

అన్నం. 3. యంత్రాంగం యొక్క సాధ్యమైన కినిమాటిక్ పథకాలు.
అంజీర్లోని కినిమాటిక్ రేఖాచిత్రాలు. దృఢమైన త్రిభుజాల రూపంలో కనెక్ట్ చేసే రాడ్ 2 లేదా రాకర్ ఆర్మ్ 3 యొక్క చిత్రంతో 3 క్లాస్ 3 (అత్యంత సంక్లిష్టమైన క్లోజ్డ్ కాంటౌర్ యొక్క భుజాల సంఖ్య ప్రకారం) మరియు ఆర్డర్గా వర్గీకరించబడితే యంత్రాంగాన్ని వర్గీకరించడంలో లోపానికి దారితీయవచ్చు. 3 (గుంపును లీడింగ్ లింక్ (ప్రారంభ మెకానిజం) మరియు స్టాండ్తో కలుపుతున్న లీడ్ల సంఖ్య ప్రకారం. తప్పులను నివారించడానికి, మెకానిజంను విభజించడం అవసరం. ప్రోటోజోవామాడ్యూల్స్, దీని యొక్క డిస్కనెక్ట్ మెకానిజం యొక్క మిగిలిన భాగం యొక్క ఆపరేషన్కు అంతరాయం కలిగించదు. కాబట్టి, ఎంపిక తప్పనిసరిగా అంజీర్లో చూపిన క్లాస్ 1 యొక్క రెండు-లీడ్ అసూర్ గ్రూపులతో ప్రారంభం కావాలి. 1. రాడ్ 4 మరియు స్లయిడర్ 5 లను మూడు కినిమాటిక్ జతలతో అనుసంధానించడం ద్వారా అత్యంత సుదూర అసూర్ సమూహం ఏర్పడింది: C 24, E 45, 5&0 in Fig. అంజీర్లో 3, a లేదా C 34, E 45, 5&0. 3, b, ఇందులో రెండు కైనమాటిక్ జతలు “1c” రకానికి చెందినవి మరియు ఒకటి “1p” రకానికి చెందినవి (5&0). గేర్బాక్స్ S 24 మరియు 5&0 (Fig. 3, a) లేదా S 34 మరియు 5&0 (Fig. 3, b)లోని లీడ్లు ఈ Assur స్ట్రక్చరల్ గ్రూప్ (రకం GDP)ని కనెక్ట్ చేసే రాడ్ 2 (రాకర్ ఆర్మ్ 3లో ఫిగర్. 3,)తో కలుపుతాయి. బి) మరియు స్ట్రట్ 0. మిగిలిన భాగం (లింక్లు 1, 2 మరియు 3) యొక్క స్వేచ్ఛా డిగ్రీల సంఖ్య (మొబిలిటీ డిగ్రీ) సమానంగా ఉంటుంది W= 1, అసలు మెకానిజంలో వలె. మొదటి నిర్మాణ సమూహం సరిగ్గా గుర్తించబడిందని ఇది నిర్ధారిస్తుంది. తరువాత, మేము "1v" (B 12, C 23, D 03, రకం VBB యొక్క అసూర్ స్ట్రక్చరల్ గ్రూప్) యొక్క మూడు కినిమాటిక్ జతలతో రెండవ సమూహాన్ని (లింకులు 2 మరియు 3) వేరు చేస్తాము. దీని తర్వాత మిగిలిన భాగం యొక్క చలనశీలత యొక్క డిగ్రీ - కినిమాటిక్ జత A 01 తో ప్రారంభ యంత్రాంగం - W = 1కి సమానంగా ఉంటుంది. అంజీర్లో. మూర్తి 4 అసూర్ సమూహాలను విడిగా చూపిస్తుంది. అంజీర్లోని ప్రతి సమూహానికి చుక్కల బాణాలు. డ్రైవ్ లింక్ 1 ("ప్రారంభ మెకానిజం") మరియు ర్యాక్ 0ని కలిగి ఉన్న మిగిలిన మెకానిజంకు సమూహాలు జతచేయబడిన "లీడ్స్"ను మూర్తి 4 చూపిస్తుంది. అంతేకాకుండా, అటువంటి కనెక్షన్ కినిమాటిక్ జత పరిచయం ద్వారా ఊహించబడుతుంది. రాక్ లేదా దాత మెకానిజం యొక్క శరీరంలోకి జతచేయబడిన అసూర్ సమూహానికి చెందినది, దాని నుండి సాంకేతిక ఆపరేషన్ను తరలించడానికి మరియు నిర్వహించడానికి శక్తిని పొందుతుంది.
![]()
![]()
అన్నం. 4. అసూర్ యొక్క నిర్మాణ సమూహాలు. Artobolevsky I.I ప్రకారం. సమూహం యొక్క తరగతి అత్యంత సంక్లిష్టమైన క్లోజ్డ్ కాంటౌర్ను ఏర్పరిచే కైనమాటిక్ జతల సంఖ్య ద్వారా నిర్ణయించబడుతుంది. సమూహం యొక్క క్రమం అనేది కైనమాటిక్ జతల యొక్క ఉచిత మూలకాల సంఖ్య ద్వారా నిర్ణయించబడుతుంది, దానితో సమూహం ప్రారంభ యంత్రాంగం మరియు రాక్కు జోడించబడుతుంది. వేరు చేయగలిగిన రెండు నిర్మాణ సమూహాలు 2వ క్రమానికి చెందినవి మరియు 1 తరగతి, మొత్తం యంత్రాంగం ఒకే తరగతికి చెందినది. 2.6 అనవసరమైన కనెక్షన్లను తొలగించండి.లింక్ల యొక్క సమతల-సమాంతర కదలిక యొక్క ఊహ ఆదర్శవంతమైన యంత్రాంగానికి సంబంధించినది కాబట్టి, వాస్తవానికి, మూలకాల తయారీలో సరికాని కారణంగా, ప్రధానంగా లింకుల కదలిక విమానం యొక్క అక్షాల యొక్క నాన్-ఆర్తోగోనాలిటీ మరియు నాన్ భ్రమణ కైనమాటిక్ జతల అక్షాల సమాంతరత, యంత్రాంగం ప్రాదేశికమైనదిగా మార్చబడుతుంది, నిజమైన యంత్రాంగం కోసం స్వేచ్ఛ డిగ్రీల సంఖ్యను మలిషెవ్ సూత్రం ప్రకారం లెక్కించాలి. టేబుల్ 2 నుండి కైనమాటిక్ జతలను పరిగణనలోకి తీసుకుంటే, మేము పొందుతాము: మెకానిజంలో 6 రిడండెంట్ కనెక్షన్లు ఉన్నాయి, ఇవి తక్కువ కైనమాటిక్ జతలను అధిక వాటితో భర్తీ చేయడం ద్వారా తొలగించబడతాయి. శక్తి ప్రవాహాల దృక్కోణం నుండి అంజీర్ 1 లోని మరింత ప్రాధాన్యత పథకం కోసం. 3, మరియు పునరావృత కనెక్షన్లను తొలగించే ఎంపికలలో ఒకటి టేబుల్ 3 మరియు అంజీర్లో చూపబడింది. 5.
పట్టిక 3.
| ప్రక్కనే ఉన్న లింక్ల సంఖ్యలు | PPD కోసం గేర్బాక్స్ రకం | ప్రాదేశిక కోసం నియంత్రణ ప్యానెల్ రకం ఉద్యమం | అంజీర్లో హోదా. 2a మరియు 2b |
|
మానవ ఉనికి యొక్క రూపంగా సంస్కృతి యొక్క ప్రాముఖ్యతను అర్థం చేసుకోగలడు మరియు సహనం యొక్క ఆధునిక సూత్రాల ద్వారా అతని కార్యకలాపాలలో మార్గనిర్దేశం చేయగలడు,
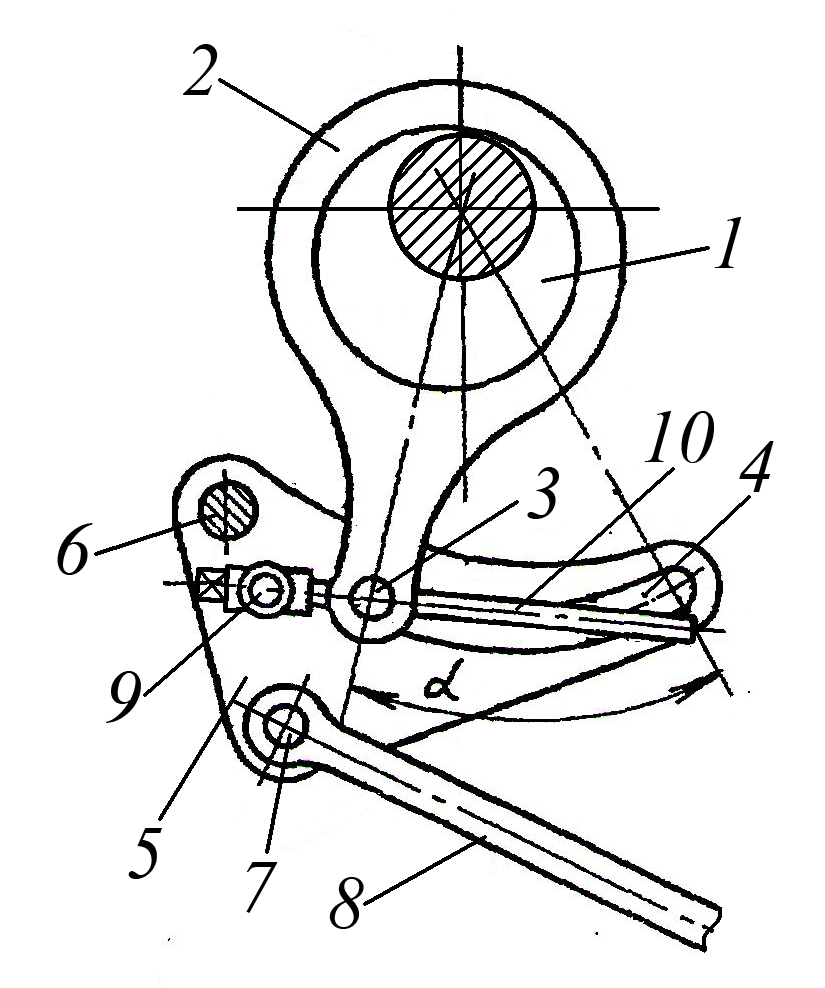
ఉత్పత్తి వివరణ
లివర్ మెకానిజమ్స్. 1 వ భాగము
లివర్ మెకానిజమ్స్లో భ్రమణ, అనువాద లేదా విమానం-సమాంతర కదలికను చేసే లింక్లను కలిగి ఉండే మెకానిజమ్లు ఉంటాయి. ఈ యంత్రాంగాలు వాటి సరళత, అధిక సామర్థ్యం మరియు అధిక లోడ్ సామర్థ్యంతో విభిన్నంగా ఉంటాయి, అయినప్పటికీ, అవి నడిచే లింక్ యొక్క చలన చట్టాన్ని అందించలేవు, ఇది కొంతవరకు సాంకేతికతలో వాటి వినియోగాన్ని పరిమితం చేస్తుంది.
కింది రకాల లివర్ మెకానిజమ్స్ సాంకేతిక పరికరాలలో విస్తృతంగా ఉపయోగించబడుతున్నాయి: నాలుగు-బార్ కీలు యంత్రాంగాలు, క్రాంక్ మెకానిజమ్స్, రాకర్ మెకానిజమ్స్. లివర్ మెకానిజమ్స్ యొక్క ఉదాహరణలు మరియు డిజైన్ లక్షణాలను చూద్దాం.
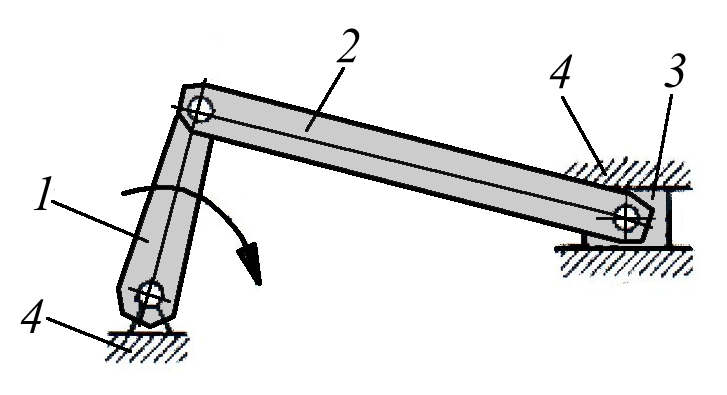
నాలుగు-బార్ ఉచ్చరించబడిన మెకానిజమ్స్
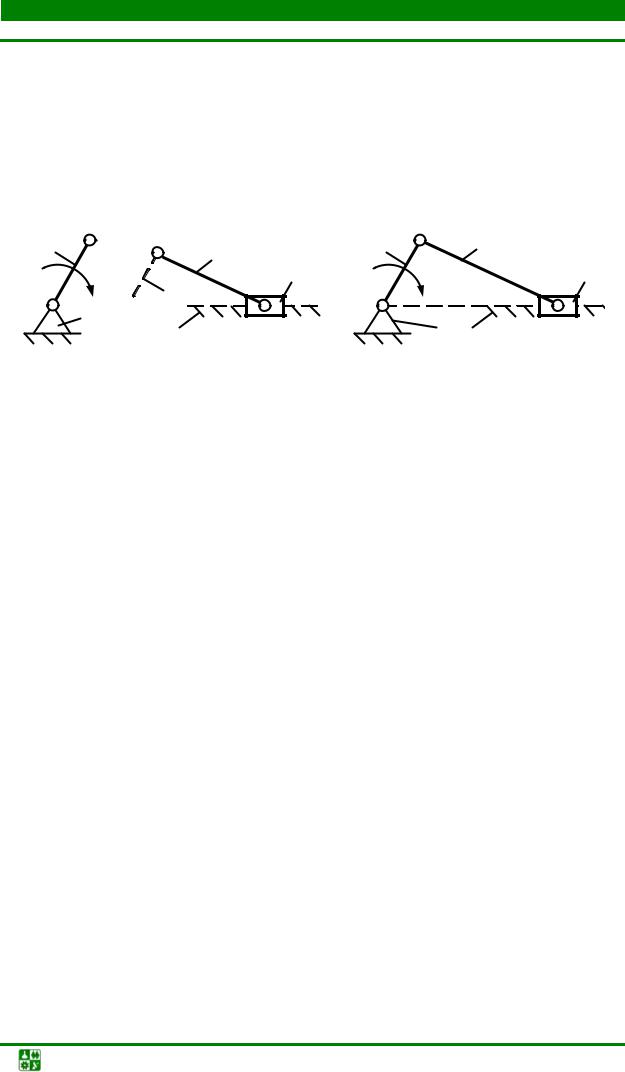
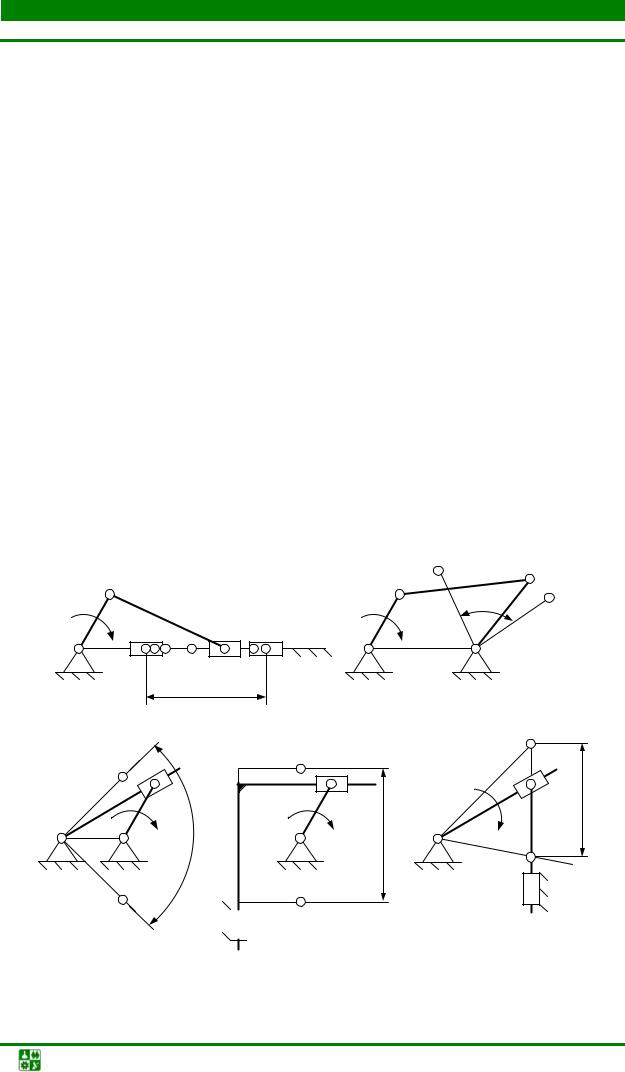
హింగ్డ్ ఫోర్-బార్ మెకానిజమ్స్, క్రమంగా, మూడు రకాలుగా విభజించబడ్డాయి: డబుల్ క్రాంక్, ఇందులో డ్రైవింగ్ మరియు నడిచే లింక్ పూర్తి విప్లవాన్ని చేయగలదు (Fig. 1a చూడండి), క్రాంక్-రాకర్, దీనిలో డ్రైవింగ్ లింక్, ది క్రాంక్, రొటేట్, మరియు నడిచే రాకర్ ఒక రాకింగ్ కదలికను చేస్తుంది (చూడండి. అంజీర్. 1b) మరియు రెండు రాకర్ చేతులు, ఇందులో డ్రైవింగ్ మరియు నడిచే లింక్లు రెండూ రాకింగ్ మోషన్ను నిర్వహిస్తాయి (Fig. 1c చూడండి).
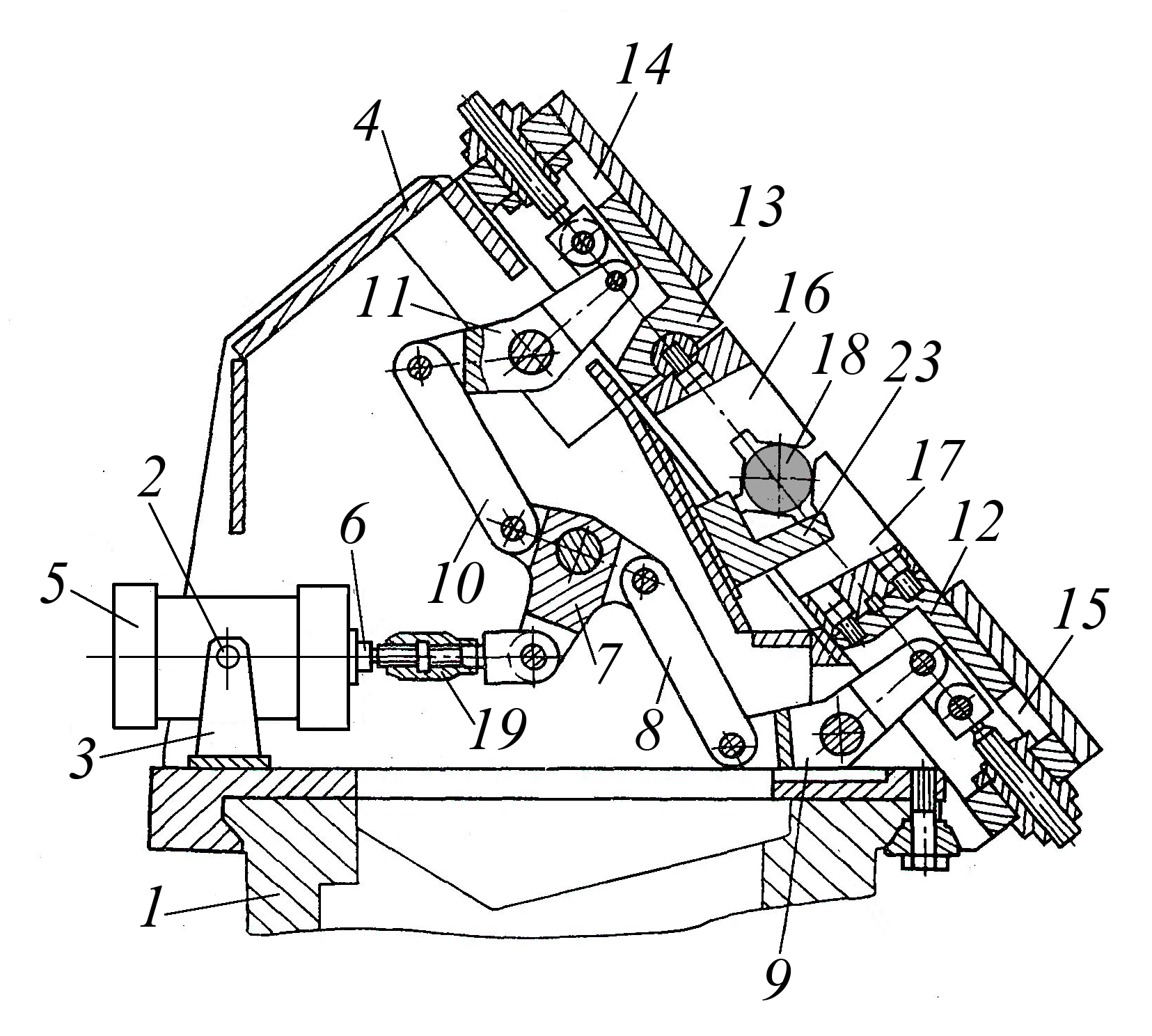
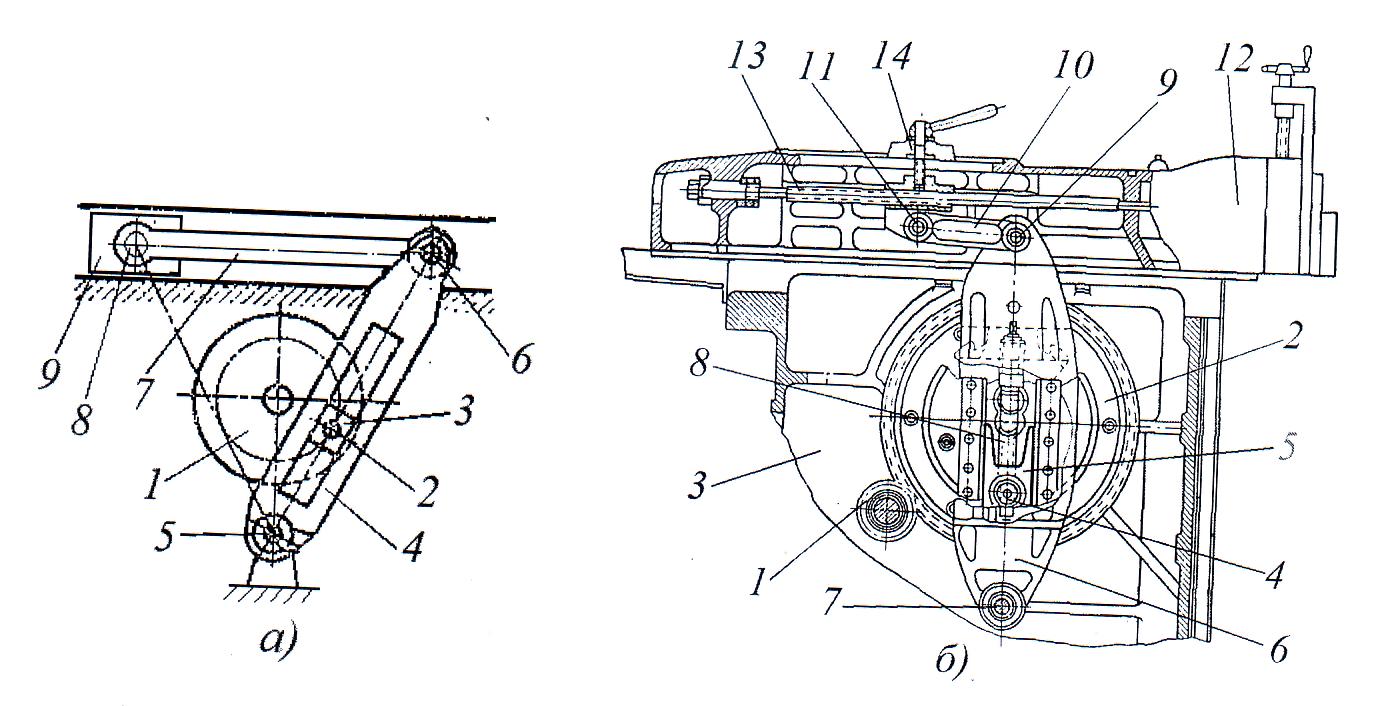
రెండు-క్రాంక్ మెకానిజం యొక్క ఉదాహరణ, పొడవైన కోణీయ ఉక్కును ఒక రాక్ నుండి సాంకేతిక పరికరాల రోలర్ కన్వేయర్కు బదిలీ చేసే విధానం, దీని డిజైన్ రేఖాచిత్రం అంజీర్లో చూపబడింది. 2. ఇది రెండు ఫోర్-రే స్ప్రాకెట్లను కలిగి ఉంటుంది 1 మరియు 2, షాఫ్ట్లు 3పై అమర్చబడి, నాలుగు క్రెడిల్ 4తో గొడ్డలి 5 ద్వారా ఒకదానికొకటి అతుకుతో అనుసంధానించబడి ఉంటుంది, బదిలీ చేసేటప్పుడు వర్క్పీస్ 6 ఉంచబడుతుంది, తద్వారా నాలుగు రెండు-క్రాంక్లు ఏర్పడతాయి. యంత్రాంగాలు. ఈ సందర్భంలో, స్లైడింగ్ బేరింగ్లపై షాఫ్ట్ 3 గృహాలు 7 మరియు 8లో ఉన్నాయి, ఇవి బ్రాకెట్లు 9 ద్వారా సాధారణ ఫ్రేమ్ 10లో అమర్చబడి ఉంటాయి.

నాలుగు-బార్ ఉచ్చరించబడిన మెకానిజమ్ల యొక్క మరొక ప్రతినిధి డబుల్-రాకర్ మెకానిజమ్స్ (Fig. 3 చూడండి), ఇవి ఒక నియమం వలె, నడిచే రాకర్ ఆర్మ్ యొక్క స్వింగ్ కోణాన్ని మార్చడానికి (పెంచడానికి, తగ్గించడానికి) లేదా దానిపై సృష్టించబడిన శక్తిని మార్చడానికి ఉపయోగించబడతాయి. .
అంజీర్లో. 3 ఎడబుల్-రాకర్ మెకానిజంను చూపుతుంది, దీని రూపకల్పన (పొడవు నిష్పత్తి మరియు రాకర్ చేతులు 1 మరియు 3 యొక్క సాపేక్ష స్థానం) స్వింగ్ కోణాన్ని పెంచడానికి మిమ్మల్ని అనుమతిస్తుంది β α ప్రముఖ రాకర్ చేయి 1. అంజీర్లో. 3 బిడబుల్-రాకర్ మెకానిజం చూపబడింది, దీని రూపకల్పన (పొడవు నిష్పత్తి మరియు రాకర్ చేతులు 1 మరియు 3 సాపేక్ష స్థానం) స్వింగ్ కోణాన్ని తగ్గించడం సాధ్యం చేస్తుంది β స్వింగ్ కోణానికి సంబంధించి నడిచే రాకర్ ఆర్మ్ 3 α ప్రముఖ రాకర్ చేయి 1. అంజీర్లో చూపిన మెకానిజంలో ఉంటే. 3 ఎ, ప్రముఖ లింక్ పూర్తి విప్లవంతో తిరిగే లింక్ 3 మరియు అంజీర్లో చూపిన మెకానిజంలో ఉంటుంది. 3 బి, దాని డ్రైవింగ్ లింక్ 1 పూర్తి విప్లవాన్ని సృష్టిస్తుంది, అప్పుడు ఈ డబుల్-రాకర్ మెకానిజమ్లు క్రాంక్-రాకర్ మెకానిజమ్లుగా మారుతాయి. డ్రైవింగ్ లింక్ నుండి నడిచే లింక్కు శక్తుల ప్రసారం సమయంలో పెరుగుతున్న నష్టాల కారణంగా పరిమిత స్వింగ్ కోణంలో (60 - 90 డిగ్రీలు) మాత్రమే పనిచేయగలవు కాబట్టి, ఈ యంత్రాంగాలు యంత్రాలు మరియు పరికరాల పవర్ యాక్యుయేటర్లుగా చాలా అరుదుగా ఉపయోగించబడతాయి, క్రాంక్స్ యొక్క పెరుగుతున్న స్వింగ్ కోణాలతో. ఇటువంటి యంత్రాంగాలు సాధారణంగా సహాయక వాటిగా ఉపయోగించబడతాయి, తక్కువ వేగం మరియు లోడ్ల వద్ద పనిచేస్తాయి. ఈ రకమైన మెకానిజం తరచుగా వివిధ రకాల టిల్టర్లలో యాక్యుయేటర్గా ఉపయోగించబడుతుంది.
 అన్నం. 4. అచ్చు యంత్రం యొక్క పట్టికను టిల్టింగ్ చేయడానికి ఒక టిల్టర్.
అన్నం. 4. అచ్చు యంత్రం యొక్క పట్టికను టిల్టింగ్ చేయడానికి ఒక టిల్టర్.
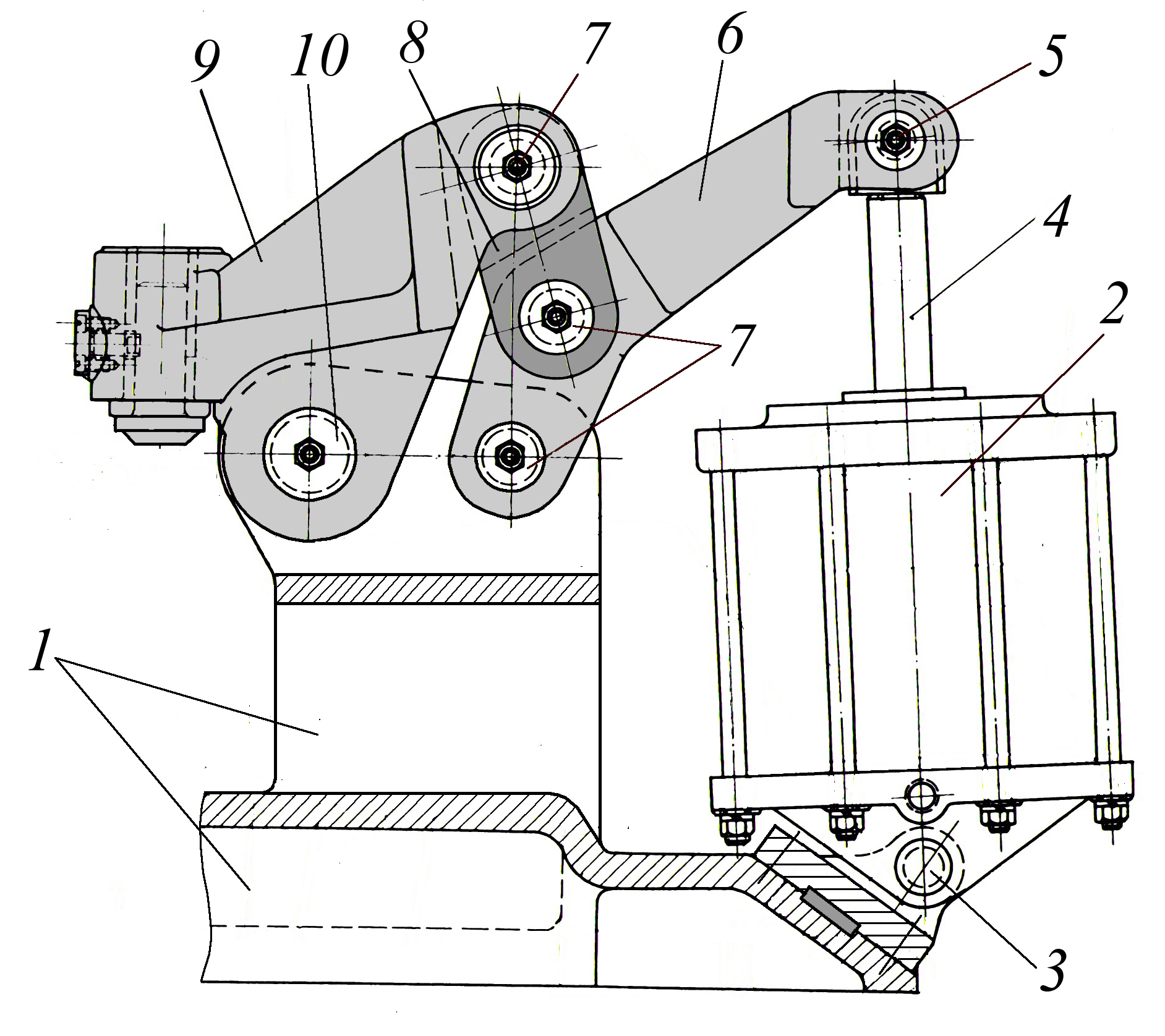
అంజీర్లో. ఫిగర్ 4 టిల్టర్ యొక్క యాక్యుయేటర్ మెకానిజమ్ను చూపుతుంది, ఇది డ్రైవింగ్ రాకర్ ఆర్మ్ 6ని కలిగి ఉంటుంది, ఇది డ్రైవింగ్ షాఫ్ట్ 3 పై కఠినంగా అమర్చబడి, ఫ్రేమ్ 1 మరియు నడిచే బేరింగ్లపై అమర్చబడి ఉంటుంది. రాకర్ ఆర్మ్ 7 అక్షం 5 మరియు స్లైడింగ్ బేరింగ్ 4 ద్వారా ఫ్రేమ్ 1 పై కీలకంగా మౌంట్ చేయబడింది, ఈ సందర్భంలో, రాడ్లు 6 మరియు 7 యొక్క వ్యతిరేక చివరలు, అక్షాలు 8 మరియు 9 ద్వారా, కనెక్ట్ చేసే రాడ్ 10కి కీలకంగా అనుసంధానించబడి ఉంటాయి, దానిపై రెండు రాక్లు 8 విలోమ క్రాస్బీమ్ 11తో గట్టిగా అమర్చబడి ఉంటాయి.డ్రైవ్ షాఫ్ట్ 3 సవ్యదిశలో తిరిగినప్పుడు (టిల్టర్ యాక్యుయేటర్ యొక్క డ్రైవ్ చూపబడదు), ప్రముఖ రాకర్ ఆర్మ్ 6 కూడా అదే దిశలో తిరుగుతుంది మరియు దానితో మొత్తం నాలుగు-బార్ కీలు యొక్క యంత్రాంగం. స్వింగ్ గొడ్డలి ఎంపిక మరియు రాకర్ చేతులు 6 మరియు 7 పొడవు అంజీర్లో చూపబడింది. 4, తిప్పినప్పుడు, ప్లాట్ఫారమ్ 11 ను ఒక కోణంలో తిప్పడానికి అనుమతిస్తుంది, ఇది ప్రత్యేకంగా అచ్చు యంత్రం యొక్క పట్టికను వంచడానికి ఉపయోగించబడుతుంది. 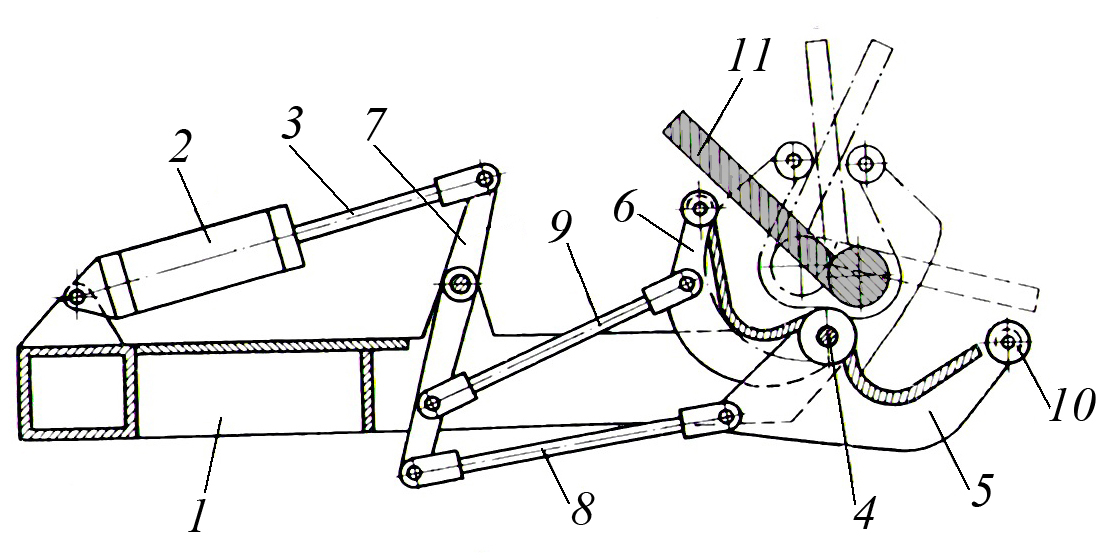
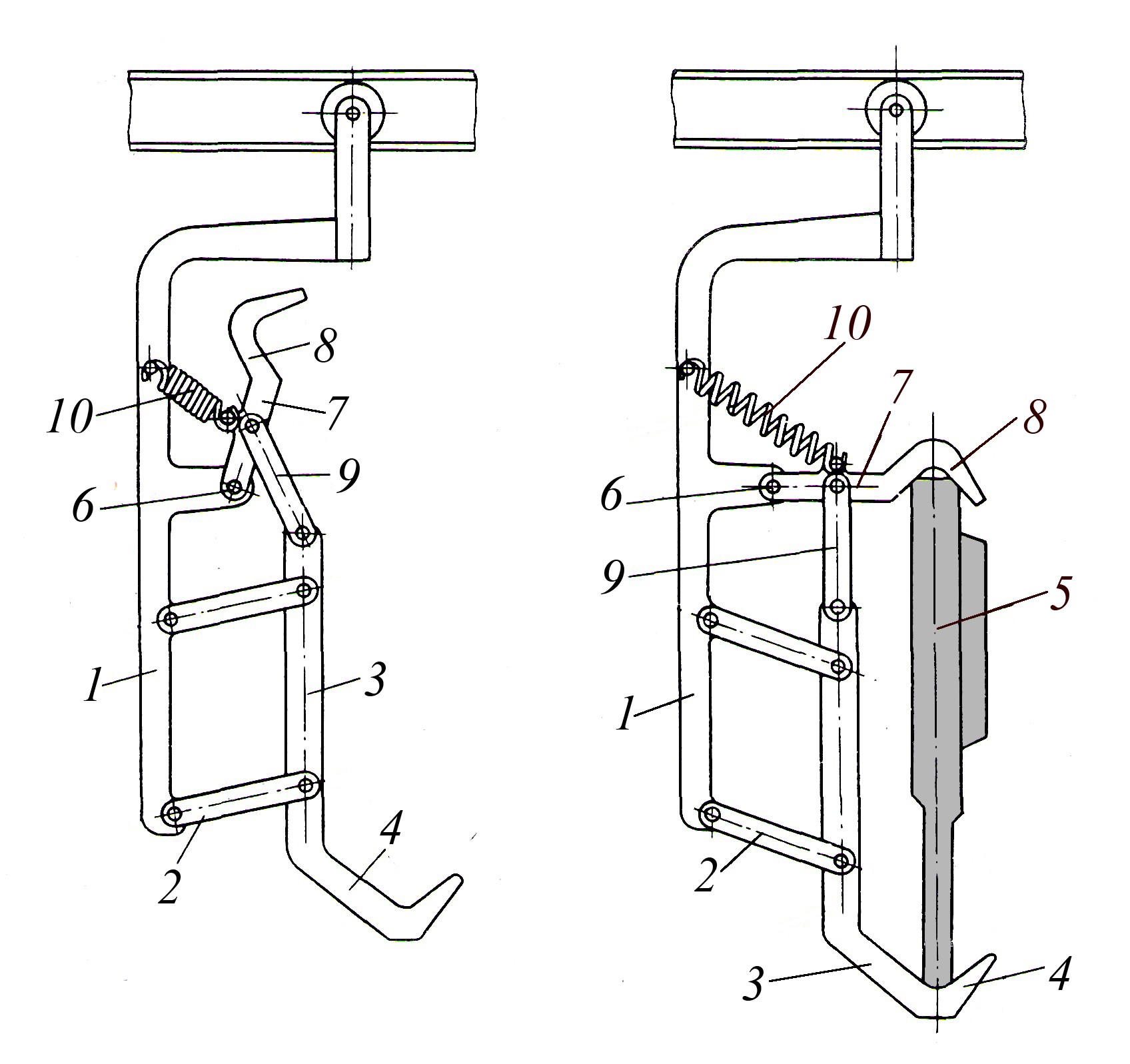
అన్నం. 5 వెల్డింగ్ పొజిషనర్ రూపకల్పన, వీటిలో రోటరీ దవడలు ఉచ్చరించబడిన నాలుగు-బార్ల యొక్క రాకర్ చేతులు నడపబడతాయి
ఫిగర్ 5 వెల్డింగ్ పొజిషనర్, తిరిగే దవడల రూపకల్పనను చూపుతుంది
ఇవి ఒక సాధారణ నడిచే రాకర్ ఆర్మ్ని కలిగి ఉన్న ఉచ్చారణ నాలుగు-లింకుల యొక్క నడిచే రాకర్ చేతులు. ఇది ఫ్రేమ్ 1పై అమర్చబడి ఉంటుంది, ఒక డ్రైవ్ న్యూమాటిక్ సిలిండర్ 2, ఇందులో రాడ్ 3 డబుల్-ఆర్మ్డ్ లివర్ 7 ద్వారా ఉంటుంది, ఇందులో నడిచే చేయి రెండు ఉచ్చారణ నాలుగు-లింక్లను కలిగి ఉన్న రాడ్లు 8ని కలిగి ఉన్న ప్రముఖ రాకర్ ఆర్మ్. మరియు 9, ఈ నాలుగు-లింక్ల రాకర్ ఆర్మ్ల ద్వారా నడిచే సాధారణ అక్షం 4పై అమర్చబడిన 5 మరియు 6 రోటరీ దవడలకు కీలకంగా కనెక్ట్ చేయబడింది.
టిల్టర్ క్రింది విధంగా పనిచేస్తుంది. ఉత్పత్తి 11 యొక్క మొదటి సీమ్ యొక్క వెల్డింగ్ను పూర్తి చేసిన తర్వాత, వాయు సిలిండర్ 2 ను ఆన్ చేయమని ఒక కమాండ్ ఇవ్వబడుతుంది, వీటిలో రాడ్ 3 ఉపసంహరించబడుతుంది మరియు తిరిగే దవడలు 5 మరియు 6ని కలిపి, వెల్డెడ్ ఉత్పత్తి 11 ను ఇన్స్టాల్ చేస్తున్నప్పుడు నిలువు స్థానం (ఈ సమయంలో, మద్దతు రోలర్లు 10 ఉత్పత్తి యొక్క షెల్ఫ్ వెంట తిరుగుతాయి). దీని ఫలితంగా, వెల్డెడ్ ఉత్పత్తి 11 యొక్క గురుత్వాకర్షణ కేంద్రం మద్దతు ప్రిజం (అంజీర్ 5 లో చూపబడలేదు) ఎదురుగా కదులుతుంది మరియు రాడ్ 3 ఉన్నప్పుడు సంభవించే మీటలు 5 మరియు 6 యొక్క తదుపరి ఓపెనింగ్తో వాయు సిలిండర్ 2 పొడిగించబడింది, ఉత్పత్తి రెండవ సీమ్ను వెల్డింగ్ చేయడానికి అనుకూలమైన స్థితిలో ఉంచబడుతుంది.
అత్తి 6 రెండు ఉచ్చారణ నాలుగు-బార్లను కలిగి ఉన్న మిల్లింగ్-సెంట్రల్ మెషిన్ యొక్క బిగింపు విధానం యొక్క రూపకల్పన.
ఫిగర్ 6 మిల్లింగ్-సెంట్రల్ మెషిన్ యొక్క బిగింపు మెకానిజం రూపకల్పనను చూపుతుంది, ఇందులో రెండు ఉచ్చరించబడిన నాలుగు-బార్లు ఉన్నాయి, వీటిలో లీడింగ్ లింక్ మూడు-చేతుల లివర్, అయితే రెండవది డ్రైవ్ యొక్క రాడ్తో అనుసంధానించబడి ఉంటుంది. వాయు సిలిండర్, మరియు నాలుగు-బార్ల యొక్క నడిచే రాకర్ చేతులు క్రమంగా కదిలే బిగింపు ప్రిజమ్లకు అనుసంధానించబడి ఉంటాయి. ఇది యంత్రం యొక్క ఫ్రేమ్ 1పై అమర్చబడిన హౌసింగ్ 4ని కలిగి ఉంది, దీనిలో ఒక రాడ్ 6తో కూడిన డ్రైవ్ న్యూమాటిక్ సిలిండర్ 5 అక్షం 2 మరియు బ్రాకెట్ 3 ద్వారా హింగ్గా మౌంట్ చేయబడుతుంది, రెండోది రాడ్ 19 మరియు మూడు-చేతులను ఉపయోగిస్తుంది. లివర్ 7, ఇంటర్మీడియట్ రాడ్లు 8 మరియు 10 మరియు టూ-ఆర్మ్ లివర్స్ 9 మరియు 11, స్లయిడర్లు 12 మరియు 13కి కీలకంగా అనుసంధానించబడి ఉన్నాయి, ఇవి హౌసింగ్లోని గైడ్లు 14 మరియు 15లో ఇన్స్టాల్ చేయబడ్డాయి 4. స్లయిడర్లలో 12 మరియు 13, ప్రిజంలు 16 మరియు 17 స్థిరంగా ఉంటాయి, వీటి మధ్య బేస్ క్రెడిల్ 23 ఇన్స్టాల్ చేయబడింది.
బిగింపు విధానం క్రింది విధంగా పనిచేస్తుంది. బేస్ క్రెడిల్ 23లో ముందుగా ఇన్స్టాల్ చేయబడిన వర్క్పీస్ (షాఫ్ట్ ట్రిమ్ మరియు సెంటర్డ్) బిగించడానికి, కంప్రెస్డ్ ఎయిర్ న్యూమాటిక్ సిలిండర్ 5 యొక్క రాడ్ కేవిటీకి సరఫరా చేయబడుతుంది, అయితే దాని రాడ్ 6 ఉపసంహరించుకుంటుంది మరియు సవ్యదిశలో త్రీ ఆర్మ్ లివర్ 7 మారుతుంది. , ఇది, ఇంటర్మీడియట్ రాడ్లు 8 మరియు 10 ద్వారా, డబుల్-ఆర్మ్డ్ లివర్స్ 9 మరియు 11 స్లయిడర్లు 12 మరియు 13ని వాటికి జోడించిన ప్రిజమ్లు 16 మరియు 17తో కలిపి తీసుకువస్తాయి, ఇవి వర్క్పీస్ను బిగించాయి 18. ప్రాసెస్ చేయబడిన వర్క్పీస్ను విడుదల చేయడానికి, సంపీడన గాలి సరఫరా చేయబడుతుంది. వాయు సిలిండర్ 5 యొక్క పిస్టన్ కేవిటీకి, దాని రాడ్ 6 రాడ్ 19 ద్వారా విస్తరించి ఉంటుంది మరియు లివర్ మెకానిజం 12 మరియు 13 స్లయిడర్లను ప్రిజమ్స్ 16 మరియు 17తో వాటి అసలు స్థానానికి తిరిగి ఇస్తుంది, అదే సమయంలో ప్రాసెస్ చేయబడిన వర్క్పీస్ను విడుదల చేస్తుంది.
అంజీర్. 7 టేబుల్టాప్ ప్రెస్ యొక్క యాక్యుయేటర్ రూపకల్పన.
మూర్తి 7 న్యుమోమెకానికల్ డ్రైవ్తో టేబుల్టాప్ ప్రెస్ రూపకల్పనను చూపుతుంది, దీని యాక్యుయేటర్ డబుల్-రాకర్ మెకానిజం. ఇది ఫ్రేమ్ 1పై అక్షం 3 ద్వారా అమర్చబడిన పవర్ న్యూమాటిక్ సిలిండర్ 2ని కలిగి ఉంటుంది, దీని రాడ్ 4 కూడా అక్షం 5 ద్వారా రాకర్ ఆర్మ్ 6కి కీలకంగా అనుసంధానించబడి ఉంటుంది మరియు రెండోది ఇరుసు 7ని ఉపయోగించి రాడ్ 8కి కీలకంగా కనెక్ట్ చేయబడింది. , ఇది ఒక అక్షం 7 ద్వారా డబుల్-ఆర్మ్డ్ లివర్కి అనుసంధానించబడి ఉంటుంది. ముఖ్యమైన శక్తులను అభివృద్ధి చేయగల సామర్థ్యం.
అన్నం. 8. ఆధారంగా తయారు చేయబడిన కన్వేయర్ కార్గో సస్పెన్షన్ రూపకల్పన
ఉచ్చరించబడిన నాలుగు-బార్
అంజీర్లో. మూర్తి 8 కన్వేయర్ కార్గో సస్పెన్షన్ రూపకల్పనను చూపుతుంది, దీని యాక్యుయేటర్ నాలుగు-బార్ కీలు కలిగి ఉంటుంది. ఈ డిజైన్ రవాణా చేయబడిన భాగం యొక్క సాధారణ మరియు నమ్మదగిన స్థిరీకరణ మరియు బిగింపు, అలాగే దాని సంస్థాపన మరియు అన్లోడ్ను నిర్ధారిస్తుంది. ఇది కన్వేయర్ క్యారేజ్పై అమర్చబడిన స్థిర స్టాండ్ 1ని కలిగి ఉంటుంది మరియు రవాణా చేయబడిన పార్ట్ 5ని ఇన్స్టాల్ చేయడానికి రెండు సమాన-పొడవు రాకర్ ఆర్మ్స్ 2, లోడ్ మోసే షెల్ఫ్ 4తో రాడ్ 3, అలాగే లివర్ 7ని ఉపయోగించి దానికి కనెక్ట్ చేయబడింది. ప్రెజర్ షెల్ఫ్ 8, అక్షం 6 ద్వారా స్థిర స్టాండ్ 1కి కీలకంగా కనెక్ట్ చేయబడింది మరియు రాడ్ 9 ద్వారా ఇది రాడ్ 3కి కీలకంగా కనెక్ట్ చేయబడింది. ఈ సందర్భంలో, స్థిర పోస్ట్ మధ్య పొడిగింపు స్ప్రింగ్ 10 వ్యవస్థాపించబడుతుంది. 1 మరియు లివర్ 7.
సస్పెన్షన్ క్రింది విధంగా పనిచేస్తుంది. ప్రారంభ స్థానంలో, లోడ్ మోసే షెల్ఫ్ 4 తో రాడ్ 3 మరియు ఒత్తిడి షెల్ఫ్ 8 తో లివర్ 7 ఎగువ స్థానంలో ఉన్నాయి మరియు సస్పెన్షన్పై పార్ట్ 5 యొక్క సంస్థాపనతో జోక్యం చేసుకోకండి. ఈ స్థితిలో, పార్ట్ 5 లోడ్ మోసే షెల్ఫ్ 4 లో వ్యవస్థాపించబడింది, అయితే దాని బరువు ప్రభావంతో, లివర్ 7, రాడ్ 9 మరియు రాడ్ 3, స్ప్రింగ్ 10 యొక్క శక్తిని అధిగమించి, క్రిందికి తగ్గించబడతాయి. బిగింపు షెల్ఫ్ 8 రాకర్ ఆర్మ్స్ 2తో రాడ్ 3 యొక్క కనెక్షన్ పాయింట్ కంటే పెద్ద వ్యాసార్థంతో తిరుగుతుంది కాబట్టి, అదే సమయంలో అది లోడ్ మోసే ఫోర్క్ 4 కంటే ఎక్కువ దూరం ప్రయాణిస్తుంది, కాబట్టి పార్ట్ 5 నొక్కబడుతుంది. బిగించే షెల్ఫ్ 8 ద్వారా లోడ్ మోసే షెల్ఫ్కు 4. దాని భాగాలను అన్లోడ్ చేయడం కోసం లోడ్ మోసే షెల్ఫ్ 4 మరియు ప్రెజర్ షెల్ఫ్ 8 స్ట్రోక్ మొత్తం ద్వారా పైకి లేపబడతాయి మరియు స్ప్రింగ్ 10 రిటర్న్ చర్యలో లివర్ 7తో కలిసి ఉంటాయి. ఎగువ ప్రారంభ స్థానానికి, తద్వారా భాగాన్ని విడుదల చేస్తుంది.
క్రాంక్ మెకానిజమ్స్
అన్ని రకాల లివర్ మెకానిజమ్స్లో, క్రాంక్ మెకానిజమ్లు కైనమాటిక్స్ యొక్క సరళత కారణంగా సాంకేతికతలో చాలా విస్తృతంగా ఉన్నాయి, ఇది భ్రమణ చలనాన్ని అనువాద చలనంగా మార్చడం సాపేక్షంగా సులభం చేస్తుంది, ఇది సాంకేతిక పరికరాల యాక్యుయేటర్లలో వాటిని ఉపయోగించడానికి అనుమతిస్తుంది, ఉదాహరణకు, మెకానికల్ ప్రెస్లలో. , మరియు భ్రమణ చలనంలోకి అనువాద చలనం, ఇది వాటిని అంతర్గత దహన యంత్రం యొక్క యాక్యుయేటర్గా ఉపయోగించడానికి అనుమతిస్తుంది. క్రాంక్ మెకానిజం అనేది ఫ్రేమ్లో భ్రమణం (క్రాంక్ లేదా ఎక్సెంట్రిక్ షాఫ్ట్) అవకాశం ఉన్న క్రాంక్ 1ని కలిగి ఉంటుంది, కనెక్ట్ చేసే రాడ్ 2 దానికి కీలకంగా కనెక్ట్ చేయబడింది, ఇది స్లయిడర్ 3కి కీలకంగా కనెక్ట్ చేయబడింది, ఇది క్రాంక్ 1 తిరిగినప్పుడు, ఫ్రేమ్ 4 యొక్క మార్గదర్శకాలలో పరస్పర కదలికను నిర్వహిస్తుంది (Fig. 9 చూడండి).
అన్నం. 9. క్రాంక్ మెకానిజం.
అంజీర్లో. మూర్తి 10 నాలుగు-సిలిండర్ అంతర్గత దహన యంత్రం యొక్క క్రాంక్-రాడ్ మెకానిజంను చూపుతుంది, ఇందులో నాలుగు-ఎక్సెంట్రిక్ క్రాంక్ షాఫ్ట్ 1 మరియు నాలుగు పిస్టన్ సమూహాలు ఉంటాయి (Fig. 10 సాంప్రదాయకంగా ఒక పిస్టన్ సమూహాన్ని చూపుతుంది), వీటిలో ప్రతి ఒక్కటి కనెక్ట్ చేసే రాడ్ 2 మరియు a పిస్టన్ 3, ఇది సంబంధిత సిలిండర్ యొక్క లైనర్లో కలుపుతారు.
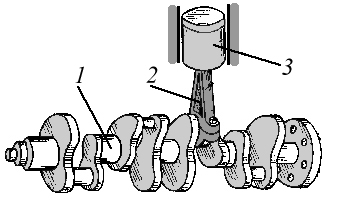
అన్నం. 10. క్రాంక్ మెకానిజం
అంతర్గత దహన యంత్రము.
అనేక యంత్రాలు మరియు పరికరాల రూపకల్పనకు పెద్ద స్లయిడర్ స్ట్రోక్ మరియు స్ట్రోక్ చివరిలో పెద్ద శక్తి అవసరం. ఈ సందర్భంలో, మోకాలి-లివర్ మెకానిజమ్స్ ఉపయోగించబడతాయి, ఇందులో క్రాంక్ మరియు కనెక్ట్ చేసే రాడ్ గ్రూప్ కూడా ఉన్నాయి (Fig. 11 చూడండి). ఇటువంటి మెకానిజంలో డ్రైవ్ షాఫ్ట్ 2 పై అమర్చిన క్రాంక్ 1, ఫ్రేమ్ బేరింగ్లలో తిరిగే డ్రైవ్, రాడ్ కనెక్టింగ్ రాడ్ 4, రాకర్ ఆర్మ్ 6, నడిచే కనెక్ట్ చేసే రాడ్ 7 మరియు ఫ్రేమ్ 11 యొక్క గైడ్లలో కదిలే స్లయిడర్ 10 ఉంటాయి. , రాకర్ ఆర్మ్ 6 అక్షం 8 ద్వారా ఫ్రేమ్కు కీలకంగా అనుసంధానించబడి ఉండగా, మరియు నడిచే కనెక్ట్ చేసే రాడ్ 7 అక్షం 9 ద్వారా స్లయిడర్ 10కి కనెక్ట్ చేయబడింది (Fig. 11a చూడండి). అటువంటి మెకానిజం యొక్క అవుట్పుట్ లింక్ క్రమంగా కదిలే స్లయిడర్ కాకపోవచ్చు, కానీ స్వింగింగ్ లింక్ 10, అక్షం 9 ద్వారా నడిచే కనెక్ట్ చేసే రాడ్ 7కి మరియు అక్షం 11 ద్వారా ఫ్రేమ్కి కనెక్ట్ చేయబడింది (Fig. 11b చూడండి).
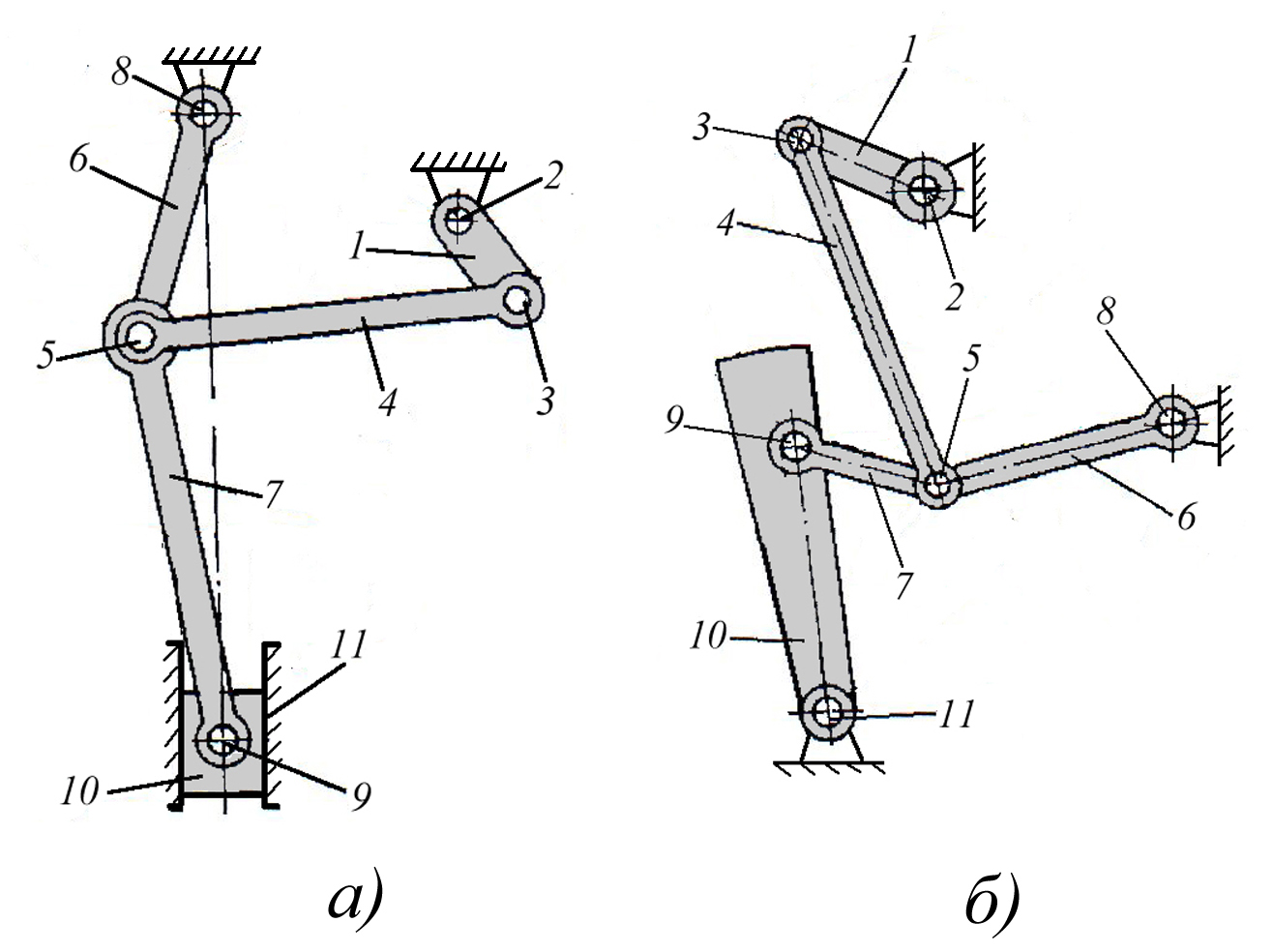
అన్నం. 11. స్ట్రోక్ చివరిలో స్లయిడర్పై పెద్ద స్లయిడర్ స్ట్రోక్ మరియు ఫోర్స్తో మెకానిజమ్లను క్రాంక్ చేయండి.
రాకర్ చేతులు, మీటలు మరియు రాడ్ల వ్యవస్థతో కలిసి, క్రాంక్ మెకానిజం వివిధ స్ట్రోక్ పరిమాణాలు, వేగం మరియు దాని అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ల సంఖ్యను పొందటానికి మిమ్మల్ని అనుమతిస్తుంది - స్లయిడర్, ఇది అనేక యంత్రాల ఆపరేషన్లో తరచుగా అవసరం మరియు పరికరాలు.
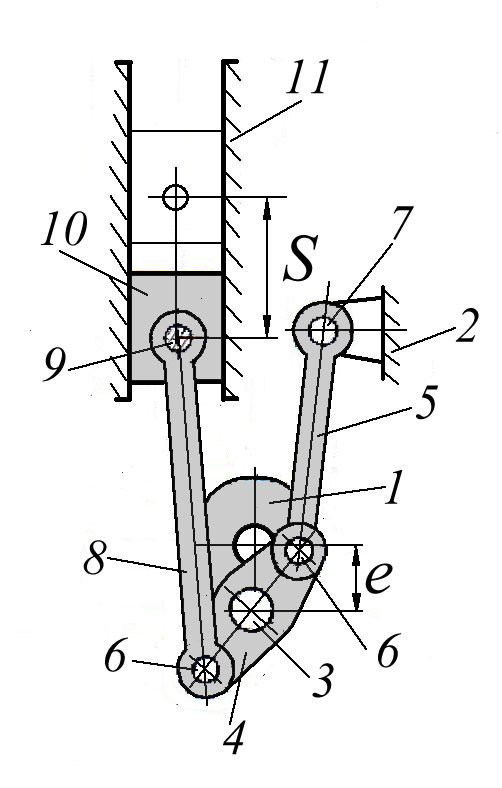
అన్నం. 12. క్రాంక్ షాఫ్ట్ యొక్క అసాధారణతతో పోలిస్తే స్లయిడ్ యొక్క రెండుసార్లు స్ట్రోక్తో క్రాంక్ మెకానిజం రూపకల్పన.
అంజీర్లో. ఫిగర్ 12 స్లయిడర్ యొక్క డబుల్ స్ట్రోక్తో క్రాంక్-రాడ్ మెకానిజం యొక్క డిజైన్ రేఖాచిత్రాన్ని చూపుతుంది ఎస్ క్రాంక్ షాఫ్ట్ విపరీత విలువతో పోలిస్తే ఇ . ఇది హౌసింగ్ 2లో బేరింగ్స్పై అమర్చిన క్రాంక్ షాఫ్ట్ 1ని కలిగి ఉంది, క్రాంక్ మెడ 3లో ఒక రాకర్ ఆర్మ్ 4 ఉంది, ఇందులో యాక్సిస్ 6 ద్వారా కనెక్ట్ చేయబడిన ఒక రాడ్ 5 ఉంది. 8 గైడ్లలో కదులుతున్న స్లయిడర్ 10కి అక్షం 9 ద్వారా కీలకంగా కనెక్ట్ చేయబడింది 11. రాకర్ ఆర్మ్ 4 యొక్క మెకానిజం రూపకల్పనలో ఉనికిని క్రాంక్ షాఫ్ట్ 1 యొక్క క్రాంక్ మెడపై హింగ్గా మౌంట్ చేసి, రాడ్ 5కి కనెక్ట్ చేసి కనెక్ట్ చేయడం రాడ్ 8, స్లయిడర్ 10కి దాని ఫార్వర్డ్ మరియు రివర్స్ స్ట్రోక్ సమయంలో కదలికను పెంచుతుంది.
![]()
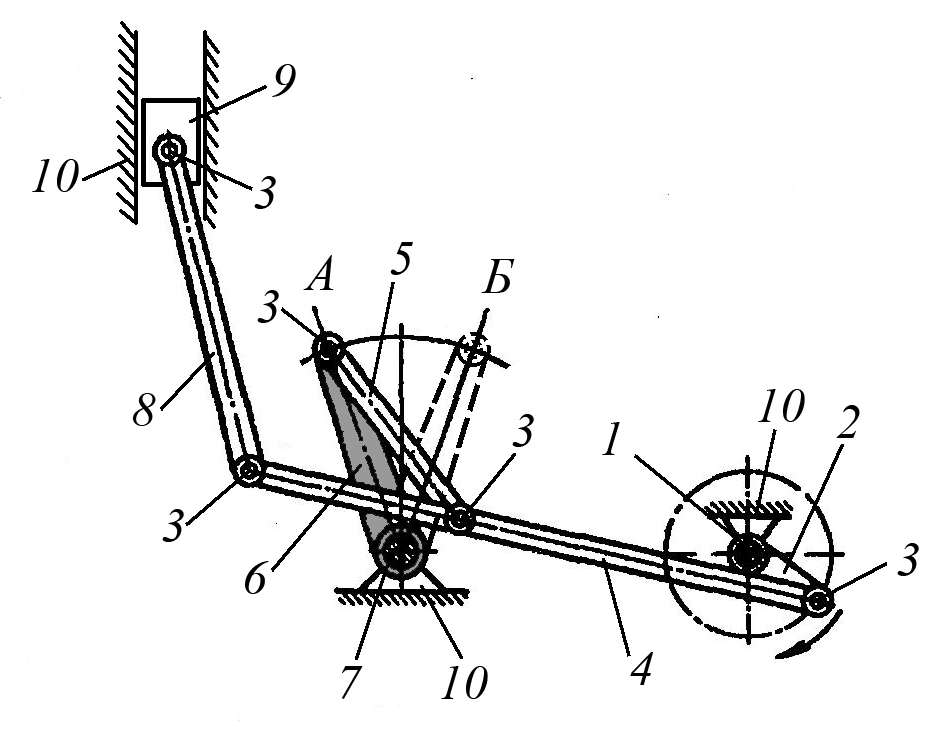
అన్నం. 13. మెకానిజం రూపకల్పన క్రాంక్ షాఫ్ట్ భ్రమణ వేగాన్ని మార్చకుండా స్లయిడర్ యొక్క స్ట్రోక్స్ సంఖ్యను రెట్టింపు చేయడానికి అనుమతిస్తుంది.
అంజీర్లో. 13 రాకర్ మెకానిజంతో కలిపి క్రాంక్ మెకానిజం రూపకల్పనను చూపుతుంది, ఇది డ్రైవ్ క్రాంక్ షాఫ్ట్ యొక్క భ్రమణ కోణీయ వేగాన్ని పెంచకుండా స్లయిడర్ యొక్క స్ట్రోక్ల సంఖ్యను రెట్టింపు చేయడానికి అనుమతిస్తుంది. ఇది ఫ్రేమ్పై బేరింగ్లలో అమర్చబడిన క్రాంక్ షాఫ్ట్ 1ని కలిగి ఉంటుంది మరియు డ్రైవ్ నుండి భ్రమణాన్ని అందుకుంటుంది (డ్రైవ్ అంజీర్ 13లో చూపబడలేదు), కనెక్ట్ చేసే రాడ్ 2, డబుల్ ఆర్మ్ లివర్ 3, దీని ద్వారా ఫ్రేమ్పై కీలకంగా అమర్చబడి ఉంటుంది. ఒక అక్షం 4 మరియు, కనెక్ట్ చేసే రాడ్ 5 ద్వారా, స్లయిడర్ 6కి కనెక్ట్ చేయబడి, బెడ్ గైడ్లు 7లో కదులుతుంది.
యంత్రాంగం క్రింది విధంగా పనిచేస్తుంది. క్రాంక్ షాఫ్ట్ 1ని 180 డిగ్రీల కోణంలో తిప్పినప్పుడు, డబుల్ ఆర్మ్ లివర్ 3 కోణంలో తిరుగుతుంది ఎ
, స్లయిడర్ 6 ఒక డబుల్ స్ట్రోక్ చేస్తుంది, క్రాంక్ షాఫ్ట్ 1ని మరో 180 డిగ్రీలు తిప్పడంతో, డబుల్ ఆర్మ్ లివర్ 3 మళ్లీ ఒక కోణంలో మలుపు తిరుగుతుంది. ఎ
, దాని అసలు స్థానానికి తిరిగి వస్తుంది మరియు స్లయిడర్ 6, అదే సమయంలో, క్రాంక్ షాఫ్ట్ యొక్క ఒక విప్లవంలో రెండవ డబుల్ స్ట్రోక్ చేస్తుంది.
అన్నం. 14. లివర్ మెకానిజం రూపకల్పన మీరు అవుట్పుట్ లింక్ యొక్క కదలికను రివర్స్ చేయడానికి అనుమతిస్తుంది.
కొన్ని సందర్భాల్లో, నాన్-రివర్సిబుల్ డ్రైవ్ సమక్షంలో, మెకానిజం యొక్క అవుట్పుట్ లింక్ యొక్క కదలికను రివర్స్ చేయడం అవసరం అవుతుంది; దీని కోసం, అంజీర్ 1 లో చూపిన విధంగా అదనపు లింక్లను దానిలో నిర్మించవచ్చు. 14. ఈ క్రాంక్-లివర్ మెకానిజం డ్రైవ్ షాఫ్ట్ 1పై అమర్చిన క్రాంక్ 2ని కలిగి ఉంటుంది, ఫ్రేమ్ 10లోని బేరింగ్లపై అమర్చబడి, డ్రైవింగ్ కనెక్టింగ్ రాడ్ 4కి అక్షం 3 ద్వారా పివోటల్గా కనెక్ట్ చేయబడింది, దీని ద్వారా కీలకంగా కనెక్ట్ చేయబడుతుంది. గొడ్డలి 3 నుండి ఇంటర్మీడియట్ కనెక్టింగ్ రాడ్ 5 మరియు నడిచే ఒక కనెక్టింగ్ రాడ్ 6, ఇవి వరుసగా రాకర్ ఆర్మ్ 6 మరియు స్లయిడర్ 9కి అక్షాలు 3 ద్వారా కీలకంగా అనుసంధానించబడ్డాయి. స్లయిడర్ 9 యొక్క పరస్పర కదలిక యొక్క దిశను మార్చడానికి, రాకర్ ఆర్మ్ 6 స్థానం A నుండి స్థానం Bకి మరియు వైస్ వెర్సాకు తరలించబడుతుంది, దాని తర్వాత అది స్థిరంగా ఉంటుంది (గొళ్ళెం అంజీర్ 14 లో చూపబడలేదు).

అన్నం. 15. ఉచ్చారణ మరియు లివర్ మెకానిజమ్ల వ్యవస్థను కలిగి ఉన్న హెలికాప్టర్ స్వాష్ప్లేట్ యొక్క డిజైన్ రేఖాచిత్రం.
అంజీర్లో. హెలికాప్టర్ యొక్క ప్రధాన రోటర్ యొక్క బ్లేడ్లను నియంత్రించే కాంపాక్ట్ ఆటోమేటిక్ స్వాష్ప్లేట్ యొక్క అసలు రూపకల్పనను మూర్తి 15 చూపిస్తుంది, ఇది హింగ్డ్ లివర్ మెకానిజమ్ల ఆధారంగా తయారు చేయబడింది. ఇది ప్రధాన రోటర్ బ్లేడ్లను నియంత్రించే కీలు గల రాడ్లు 2తో తిరిగే రింగ్ 1ని కలిగి ఉంటుంది మరియు స్ప్లైన్ - కీలు 3, ఇది బాల్ బేరింగ్ ద్వారా రొటేటింగ్ కాని రింగ్ 5లో ఇన్స్టాల్ చేయబడింది 4. స్ప్లైన్ యొక్క డ్రైవ్ - కీలు 3 హెలికాప్టర్ రోటర్ డ్రైవ్ గేర్బాక్స్ యొక్క షాఫ్ట్ 6లో పరిష్కరించబడింది. నాన్-రొటేటింగ్ రింగ్ 5లో, 7 మరియు 8 వేళ్లు మరియు గోళాకార బేరింగ్లు 9 మరియు 10 ఉపయోగించి, ఫ్రేమ్ 11 కదలికలు. ఫ్రేమ్ 11లో, 12 మరియు 13 వేళ్లు మరియు గోళాకార బేరింగ్లు 14 మరియు 15 పాయింట్ల వద్ద TO
మరియు ఎం
ఒక లివర్ 16 స్థిరంగా ఉంది, ఇది రేడియల్ ప్లెయిన్ బేరింగ్లు 19 మరియు 20 మరియు థ్రస్ట్ బేరింగ్లు 21 మరియు 22లో ఒక బ్రాకెట్లో పిన్ 17 ద్వారా అమర్చబడి ఉంటుంది 18 గేర్బాక్స్ హౌసింగ్పై కఠినంగా మౌంట్ చేయబడింది 23. లివర్ 16 రెండు చేతులు మరియు దాని డ్రైవింగ్తో తయారు చేయబడింది. బ్లేడ్ స్క్రూ యొక్క సాధారణ పిచ్ను నియంత్రించడానికి చేయి రాడ్ 24కి కీలకంగా అనుసంధానించబడి ఉంది రేఖాంశ మరియు పార్శ్వ నియంత్రణ రాడ్లు 25 మరియు 26 సామూహిక పిచ్ నియంత్రణ రాడ్ 24కి సంబంధించి వ్యతిరేక వైపులా తిరిగే కాని రింగ్ 5కి కీలకంగా అనుసంధానించబడి ఉంటాయి. యంత్రం యొక్క రూపకల్పనలో గోళాకార బేరింగ్లు 9, 10, 14, 15 ఉనికిని గోళం వెంట తిరిగే రింగ్ 1 యొక్క భ్రమణాన్ని నిర్ధారిస్తుంది, ఇది హెలికాప్టర్ నియంత్రణ వ్యవస్థ యొక్క సాధారణ ఆపరేషన్ కోసం అవసరం. ఈ సందర్భంలో, అక్షం గోళాకార బేరింగ్లు 9 మరియు 10 కేంద్రాల గుండా వెళుతుంది జి
మరియు డి
మరియు గోళాకార బేరింగ్లు 14 మరియు 15 కేంద్రాల గుండా ఒక అక్షం TO
మరియు ఎం
పరస్పరం లంబంగా, మరియు ఫ్రేమ్ 11 మరియు లివర్ 16 యొక్క స్థానం, ప్రొపెల్లర్ బ్లేడ్ల యొక్క మొత్తం పిచ్ను నియంత్రించడానికి మరియు డ్రైవ్ షాఫ్ట్ 6 యొక్క అక్షానికి సంబంధించి స్థానభ్రంశం మరియు భ్రమణానికి సంబంధించి నాన్-రొటేటింగ్ రింగ్ 5ని ఉంచడానికి రూపొందించబడింది, ఇది ఏకపక్షంగా ఉంటుంది. యంత్రం యొక్క రేఖాంశ మరియు విలోమ నియంత్రణ యొక్క విమానం - వక్రత. లివర్ 16 యొక్క భ్రమణ అక్షం పాయింట్ల గుండా వెళుతున్న అక్షానికి సమాంతరంగా ఉంటుంది. TO
మరియు ఎం
.
స్వాష్ప్లేట్ యంత్రం ఈ క్రింది విధంగా పనిచేస్తుంది. ప్రొపెల్లర్ బ్లేడ్ల సైక్లిక్ పిచ్ బిందువుల కదలిక యొక్క రెండు అక్షాలకు సంబంధించి కంట్రోల్ రాడ్లు 25 మరియు 26తో తిరిగే రింగ్ 1ని టిల్ట్ చేయడం ద్వారా నియంత్రించబడుతుంది. ఎ
మరియు IN
. ఈ సందర్భంలో, గోళాకార బేరింగ్లు 9 మరియు 10లో తిరిగే రింగ్ 1 మరియు నాన్-రొటేటింగ్ రింగ్ 5 ఫ్రేమ్ 11కి సంబంధించి తిరుగుతాయి మరియు గోళాకార బేరింగ్లలో తిరిగే రింగ్ 1 మరియు నాన్-రొటేటింగ్ రింగ్ 5తో కలిసి ఫ్రేమ్ 14 మరియు 15 లివర్కు సంబంధించి 16. ప్రొపెల్లర్ బ్లేడ్ల మొత్తం పిచ్ కదిలే పాయింట్ల ద్వారా నియంత్రించబడుతుంది పి
సామూహిక పిచ్ యొక్క నియంత్రణ రాడ్ ద్వారా లివర్ 16 24. లివర్ 16 బ్రాకెట్ 18పై అతుక్కొని, గేర్బాక్స్ హౌసింగ్ 23పై కఠినంగా అమర్చబడినందున, తిరిగే కాని రింగ్ 5 స్థానభ్రంశం చెందుతుంది మరియు రేడియల్గా తిప్పబడుతుంది. ఆర్
బ్రాకెట్ 18 యొక్క అక్షం గుండా వెళుతున్న అక్షానికి సంబంధించి మరియు షాఫ్ట్ 6 యొక్క అక్షానికి సంబంధించి చాలా తక్కువ మొత్తంలో స్థానభ్రంశం చెందుతుంది. ప్రొపెల్లర్ బ్లేడ్ల సాధారణ మరియు చక్రీయ పిచ్ను సంయుక్తంగా నియంత్రించేటప్పుడు, పాయింట్లు ఏకకాలంలో కదులుతాయి ఎ, బి
మరియు పి
. ఈ సందర్భంలో, స్థిర రింగ్ 5 మరియు కదిలే రింగ్ 1 యొక్క ఏకకాల వంపు మరియు కదలిక ఏర్పడుతుంది.
రాకర్ మెకానిజమ్స్
రాకర్ మెకానిజమ్లు రెండు నిర్దిష్ట లింక్లను కలిగి ఉండే యంత్రాంగాలు: ఒక రాకర్ మరియు ఒక రాకర్ రాయి (అంజీర్ 16 చూడండి), వీటిలో ప్రతి ఒక్కటి భ్రమణ లేదా రాకింగ్ కదలికను ప్రదర్శిస్తూ, ఒకదానికొకటి సాపేక్షంగా క్రమంగా కదులుతుంది. మెకానిజంలో అటువంటి రెండు లింక్లు ఉండటం వలన దాని ఫార్వర్డ్ మరియు రివర్స్ మోషన్ సమయంలో నడిచే లింక్ యొక్క కదలిక యొక్క విభిన్న వేగానికి దారి తీస్తుంది, ఇది కొన్ని సందర్భాల్లో మెకానిజం యొక్క ప్రయోజనం, మరియు కొన్ని సందర్భాల్లో ప్రతికూలత మరియు సాధారణంగా ప్రాంతాన్ని నిర్ణయిస్తుంది. దాని ఉపయోగం. రాకర్ చేసే కదలికలో తేడా ఉండే రెండు ప్రధాన రకాల రాకర్ మెకానిజమ్స్ ఉన్నాయి; ఇవి రాకర్ యొక్క రాకింగ్ మరియు భ్రమణ కదలికతో కూడిన మెకానిజమ్స్.

అన్నం. 16. రాకర్ మెకానిజమ్స్ రకాలు
అంజీర్లో. 16a చూపబడింది సన్నివేశాల రాకింగ్ కదలికతో మెకానిజం
క్రాంక్ 1ని కలిగి ఉంటుంది, అక్షం 2పై రాకర్ స్టోన్ 3 ఉంచబడుతుంది, ఇది రాకర్ 4 యొక్క గాడిలో అనువాద కదలికకు అవకాశం ఉంది, అక్షం 5 ద్వారా స్థిర స్టాండ్పై కీలకంగా అమర్చబడి రాకింగ్ చేస్తుంది క్రాంక్ 1 తిరిగినప్పుడు చలనం. ఈ సందర్భంలో, క్రాంక్ ప్రతి మూలకు 1 తిప్పబడినప్పుడు రాకర్ 4 ఫార్వర్డ్ స్ట్రోక్ చేస్తుంది ఎ
, మరియు ఒక కోణంలో క్రాంక్ను తిరిగేటప్పుడు రివర్స్ స్ట్రోక్ IN
, ఈ కోణాల అసమానత కారణంగా ఫార్వర్డ్ మరియు రివర్స్ వేగంలో వ్యత్యాసానికి దారి తీస్తుంది. అంజీర్లో. 16b చూపబడింది దృశ్యాల భ్రమణ కదలికతో కూడిన యంత్రాంగం
క్రాంక్ 1ని కలిగి ఉంటుంది, దీనిలో అక్షం 2పై రాకర్ స్టోన్ 3 ఉంచబడుతుంది మరియు రాకర్ 4, అక్షం 5 ద్వారా స్థిర స్టాండ్పై కీలకంగా అమర్చబడి, క్రాంక్ 1 తిరిగినప్పుడు భ్రమణ కదలికను నిర్వహిస్తుంది. రాకర్ మెకానిజం యొక్క ఈ రూపకల్పనతో, రాకర్ యొక్క ఫార్వర్డ్ మరియు రివర్స్ కదలిక వేగంలో వ్యత్యాసం కూడా కోణాల వ్యత్యాసం ద్వారా నిర్ణయించబడుతుంది. ఎ
మరియు IN
.
అదే ప్రయోజనాల కోసం ఉపయోగించే హింగ్డ్ ఫోర్-లింక్ మెకానిజంతో పోలిస్తే (Fig. 3 చూడండి), రాకర్ మెకానిజం డ్రైవింగ్ క్రాంక్ మరియు నడిచే రాకర్ యొక్క లేఅవుట్ను సాధారణ అక్షానికి సాపేక్షంగా ఉంచడం ద్వారా సులభతరం చేస్తుంది, కొన్నిసార్లు ఇది డిజైన్ సమయంలో అవసరం. కానీ, అదే సమయంలో, రాకర్ జతలో అదనపు స్లైడింగ్ ఘర్షణ కారణంగా రాకర్ మెకానిజం నష్టాలను పెంచింది మరియు అందువల్ల సాంకేతిక పరికరాల యొక్క తేలికగా లోడ్ చేయబడిన సహాయక మెకానిజమ్లలో ప్రధానంగా ఉపయోగించబడుతుంది.
అన్నం. 17. క్రాంక్ మెకానిజం కోణాన్ని మార్చడం
నడిచే లింక్ యొక్క స్వింగ్.
అంజీర్లో. 17. డ్రైవింగ్ లింక్కు సంబంధించి నడిచే లింక్ యొక్క స్వింగ్ కోణాన్ని పెంచడానికి లేదా తగ్గించడానికి ఉపయోగించే రాకర్ మెకానిజం యొక్క డిజైన్ రేఖాచిత్రాన్ని చూపుతుంది. ఇది షాఫ్ట్ 2పై అమర్చిన క్రాంక్ 1ని కలిగి ఉంటుంది, దానికి టార్క్ని ప్రసారం చేస్తుంది, దానికి యాక్సిస్ 3 ద్వారా కనెక్ట్ చేయబడింది, రాకర్ స్టోన్ 4 మరియు రాకర్ 5 అక్షం 6పై అమర్చబడి, సాదా బేరింగ్లపై భ్రమణం కోసం అమర్చబడి ఉంటుంది. క్రాంక్ 1 ఒక కోణంలో మారినప్పుడు ఎ స్క్రూ 5 ఒక కోణంలో తిరుగుతుంది IN , ఇది, క్రాంక్ 1 యొక్క పొడవుల యొక్క ఇచ్చిన నిష్పత్తికి, లింక్ 5 మరియు వాటి మధ్య దూరం రెట్టింపు అవుతుంది. మరియు, దీనికి విరుద్ధంగా, డ్రైవ్ లింకేజ్ 5 తో, క్రాంక్ 1 సగం కోణంలో తిరుగుతుంది.
అన్నం. 18. క్రాస్-ప్లానింగ్ మెషిన్ డ్రైవింగ్ కోసం క్రాంక్ మెకానిజం.
అయినప్పటికీ, అనేక సందర్భాల్లో, రాకర్ మెకానిజం సాంకేతిక పరికరాల యాక్యుయేటర్గా కూడా ఉపయోగించబడుతుంది. దీనికి ఉదాహరణ క్రాస్-ప్లానింగ్ మెషిన్ యొక్క కాలిపర్ డ్రైవ్, ఇది అంజీర్ 18లో చూపబడింది. ఇది ఫ్రేమ్లోని బేరింగ్లపై తిరిగే షాఫ్ట్పై అమర్చబడిన క్రాంక్ 1ని కలిగి ఉంటుంది, ఇది ఒక అక్షం 2 మరియు ఒక రాకర్ స్టోన్ 3 ద్వారా కనెక్ట్ చేయబడింది. రాకర్ 4, అక్షం 5 ద్వారా ఫ్రేమ్లో కీలకంగా మౌంట్ చేయబడింది మరియు అక్షం 6 సహాయంతో కనెక్ట్ చేసే రాడ్ 7కి కనెక్ట్ చేయబడింది, ఇది అక్షం 8 ద్వారా స్లయిడర్ 9కి కీలకంగా కనెక్ట్ చేయబడింది (Fig. 18a చూడండి). విలోమ ప్లానర్ యొక్క యాక్యుయేటర్ రూపకల్పనలో (Fig. 18b చూడండి), కినిమాటిక్ రేఖాచిత్రంలో జాబితా చేయబడిన లింక్లకు అదనంగా, అసాధారణతను సర్దుబాటు చేయడానికి ఒక గేర్ 1 - 2, స్క్రూ 8 రూపంలో క్రాంక్ డ్రైవ్ అందించబడుతుంది. క్రాంక్ అక్షం 4, దీని విలువ క్యారేజ్ యొక్క స్ట్రోక్ను నిర్ణయిస్తుంది 12 (స్లయిడర్) , సీసం స్క్రూ 13 మరియు బిగింపు 14 దాని స్థానాన్ని ఫిక్సింగ్ చేయడం యంత్రం యొక్క క్యారేజ్ 12 యొక్క ప్రారంభ స్థానాన్ని సర్దుబాటు చేయడానికి అవసరం.

అన్నం. 19. ప్రెస్ యొక్క క్రాంక్ మెకానిజం.
ప్రెస్ యొక్క క్రాంక్-కనెక్టింగ్ రాడ్ యాక్యుయేటర్ను రాకర్ మెకానిజంతో భర్తీ చేయడం వలన మీరు అసాధారణ షాఫ్ట్ మరియు స్లయిడర్ మధ్య అంతరాన్ని తగ్గించవచ్చు, అలాగే ప్రెస్ యొక్క ఇంటర్-స్టాంప్ స్పేస్ పరిమాణాన్ని సర్దుబాటు చేసే ఖచ్చితత్వాన్ని సులభతరం చేస్తుంది మరియు పెంచుతుంది ( అంజీర్ 19 చూడండి). దీని డిజైన్ ఫ్రేమ్ 1ని కలిగి ఉంది, గైడ్లు 2లో స్లయిడర్ 3 ఉంది, ఇందులో ఒక రాకర్ స్టోన్ 5, రోలర్లు 7 మరియు రాకర్ 6 ద్వారా ఒక అసాధారణ షాఫ్ట్కు కనెక్ట్ చేయబడింది 3 మరియు స్లయిడర్ 3 లోపల మరియు దానితో సంబంధం కలిగి ఉంటుంది కీ 9 మరియు ఒక స్క్రూ 8. బ్యాక్స్టేజ్ 6 యొక్క గాడిలో రాయి 5 యొక్క స్లైడింగ్ కోసం మాత్రమే అవసరమైన కనీస గ్యాప్ యొక్క రాయి 5 మరియు బ్యాక్స్టేజ్ 6 యొక్క కనెక్షన్ను నిర్ధారించడానికి, వాటి మధ్య ఒక చీలిక విధానం వ్యవస్థాపించబడుతుంది, వీటిని కలిగి ఉంటుంది ఒక చీలిక 10 మరియు సర్దుబాటు స్క్రూ 11. ఇంటర్స్టాంప్ స్థలం యొక్క పరిమాణం యొక్క ఖచ్చితమైన సర్దుబాటు కోసం, ఒక స్క్రూ 8 అందించబడుతుంది, దీని భ్రమణం స్లయిడర్ యొక్క వంపుతిరిగిన గాడితో పాటు బ్యాక్స్టేజ్ యొక్క కుడి లేదా ఎడమ 6కి కదలికకు దారి తీస్తుంది. 3 దీనిలో ఇది ఉంది, దీని ఫలితంగా స్లయిడర్ పైకి లేదా క్రిందికి కదులుతుంది. అసాధారణ షాఫ్ట్ 4 తిరుగుతున్నప్పుడు, రాయి 5 ఒక ఫ్లాట్, సమాంతర కదలికను చేస్తుంది, దీని యొక్క నిలువు భాగం స్లయిడర్ 3కి బదిలీ చేయబడుతుంది, రాయి 5 యొక్క గాడిలో క్షితిజ సమాంతర దిశలో రోలర్లు 7పై స్వేచ్ఛగా కదలగలదు. స్లయిడ్ 6.

అన్నం. 20. తిరిగే స్లయిడ్తో మెకానిజం.
అంజీర్లో. ఫిగర్ 20 విట్వర్త్ మెకానిజం అని పిలువబడే రిటర్న్ వేగాన్ని పెంచడానికి స్లాటింగ్ మెషీన్లలో రొటేటింగ్ స్లయిడ్తో కూడిన మెకానిజంను చూపుతుంది. ఇది ఒక గేర్ 1ని కలిగి ఉంటుంది, ఇది అక్షం 5పై ఉన్న గేర్ 3తో మెష్ చేస్తుంది మరియు దానికి స్థిరమైన వేగంతో భ్రమణాన్ని అందిస్తుంది, తిరిగే రాకర్ 2 యొక్క గాడిలోకి సరిపోయే రాకర్ స్టోన్ 4, దీని అక్షం 6 అక్షం గుండా వెళుతుంది. 5 మరియు విపరీతత పరిమాణం ద్వారా చక్రం 3 యొక్క భ్రమణ అక్షానికి సంబంధించి స్థానభ్రంశం చెందుతుంది ఇ , అలాగే కనెక్ట్ రాడ్ 7 యంత్రం స్లయిడర్ కనెక్ట్. ఈ సందర్భంలో క్రాంక్ అయిన గేర్ 3 యొక్క భ్రమణ అక్షానికి సంబంధించి రాకర్ 2 యొక్క భ్రమణ కేంద్రం ఆఫ్సెట్ చేయబడినందున, రాకర్ స్టోన్ 4 వర్కింగ్ స్ట్రోక్ సమయంలో ఒక కోణంలో తిరుగుతుంది. ఎ , మరియు ఒక కోణంలో రివర్స్ స్ట్రోక్ సమయంలో IN . ఎందుకంటే కోణం ఎ మరింత కోణం IN విపరీతత యొక్క పరిమాణం ద్వారా నిర్ణయించబడిన మొత్తం ద్వారా, అప్పుడు స్లయిడ్ 2 యొక్క రివర్స్ వేగం మరియు దానితో అనుబంధించబడిన కనెక్టింగ్ రాడ్ 7 ఈ కోణాల నిష్పత్తికి అనులోమానుపాతంలో పని చేసే స్ట్రోక్ వేగం కంటే ఎక్కువగా ఉంటుంది.
అన్నం. 21. నడిచే షాఫ్ట్కు స్టాప్ మోషన్ను ప్రసారం చేసే రాకర్ మెకానిజం.
స్థిరమైన వేగంతో తిరిగే డ్రైవ్ షాఫ్ట్ నుండి అడపాదడపా తిరిగే నడిచే షాఫ్ట్కు భ్రమణాన్ని ప్రసారం చేయడానికి రాకర్ మెకానిజం ఉపయోగించవచ్చు. అటువంటి యంత్రాంగం యొక్క రూపకల్పన అంజీర్లో చూపబడింది. 21. ఇది హౌసింగ్ 9లో ఇన్స్టాల్ చేయబడి, స్థిరమైన వేగంతో తిరిగే, డ్రైవ్ షాఫ్ట్ 4ని కలిగి ఉంటుంది, దానికి ఎక్సెంట్రిక్ 7 గట్టిగా అమర్చబడి ఉంటుంది, దానిపై రెండు-చేతులు కనెక్ట్ చేసే రాడ్ 8 మౌంట్ చేయబడింది, డ్రైవ్ స్లయిడ్లు 2కి హింగ్గా కనెక్ట్ చేయబడింది మరియు ఫిక్సింగ్ 6, అలాగే ఒక స్లీవ్ 11 తో నడిచే ఫ్లాంజ్ 1 యొక్క ఉచిత భ్రమణ అవకాశంతో షాఫ్ట్ 4 పై మౌంట్ చేయబడింది మరియు లింక్ 10 స్లీవ్ 12 తో ఉంటుంది. ఈ సందర్భంలో, ఫ్లేంజ్ 1 రేడియల్ గ్రూవ్స్ 3 తో తయారు చేయబడింది, దీనిలో, అసాధారణ 7 కనెక్ట్ చేసే రాడ్ 8 తో తిరిగినప్పుడు, డ్రైవ్ స్లయిడ్ 2 ప్రత్యామ్నాయంగా ప్రవేశిస్తుంది మరియు స్థిరమైన హౌసింగ్ 9 లో నిలువు గాడి 5 వెంట నిరంతరం స్లైడింగ్ చేసే ఫిక్సింగ్ స్లయిడ్ 6, క్రమానుగతంగా నడిచే అంచు యొక్క పొడవైన కమ్మీలలోకి చొప్పించబడుతుంది. 1. డ్రైవ్ షాఫ్ట్ 4 విపరీతమైన 7తో తిరిగినప్పుడు, డబుల్-ఆర్మ్డ్ కనెక్టింగ్ రాడ్ 8 క్రమానుగతంగా చొప్పించి, నడిచే ఫ్లాంజ్ 1 డ్రైవ్ 2 మరియు ఫిక్సింగ్ స్లయిడ్ 6 యొక్క గీతలు 3 నుండి తొలగిస్తుంది, ఇది నడిచే ఫ్లాంజ్ యొక్క భ్రమణానికి దారితీస్తుంది. 1 డ్రైవ్ స్లయిడ్ 2 గాడిలోకి చొప్పించబడినప్పుడు 3 మరియు లాకింగ్ స్లయిడ్ 6 గాడిలోకి చొప్పించబడినప్పుడు నడిచే ఫ్లేంజ్ 1 ఆగిపోతుంది 3. నడిచే ఫ్లాంజ్ 1లోని పొడవైన కమ్మీల సంఖ్య 3 దాని భ్రమణ వేగం యొక్క నిష్పత్తిని భ్రమణంతో నిర్ణయిస్తుంది. డ్రైవ్ షాఫ్ట్ వేగం 4. డ్రైవ్ స్లయిడ్ 2 ప్రారంభంలో గాడితో నడిచే ఫ్లాంజ్ 1లోకి ప్రవేశించడం, రెండోది నెమ్మదిగా తిరగడం ప్రారంభమవుతుంది, తర్వాత దాని వేగం త్వరగా పెరుగుతుంది మరియు స్లయిడర్ 2 నిశ్చితార్థం నుండి బయటకు వచ్చే సమయానికి అది మళ్లీ తగ్గుతుంది, ఇది మెకానిజం యొక్క అధిక వేగంతో కూడా షాక్లు మరియు ప్రభావాలను తొలగిస్తుంది.
అత్తి 22 రాకర్ మెకానిజం రూపకల్పన, డ్రైవ్ యొక్క అక్షం మరియు నడిచే షాఫ్ట్లు
ఇది 45 డిగ్రీల కోణంలో కలుస్తుంది
అంజీర్లో. 45 డిగ్రీల కోణంలో కలుస్తున్న షాఫ్ట్ల మధ్య కదలికను ప్రసారం చేయడానికి అనుమతించే రాకర్ మెకానిజం రూపకల్పనను మూర్తి 22 చూపిస్తుంది. ఈ మెకానిజం బేరింగ్స్ 2 ద్వారా హౌసింగ్ 3లో ఇన్స్టాల్ చేయబడిన డ్రైవ్ షాఫ్ట్ 1ని కలిగి ఉంది, దాని దిగువ చివరన క్రాంక్ 4, సపోర్టింగ్ క్రాంక్ 4, ఇరుసుల 5, స్లయిడర్లు 6, అలాగే అవుట్పుట్ షాఫ్ట్ 7 మౌంట్ చేయబడింది. హౌసింగ్ 3లోని బేరింగ్లు 8పై, ఇది స్లయిడ్ 9తో ఒక ముక్కలో తయారు చేయబడింది, ఇందులో రెండు పొడవైన కమ్మీలు 10 90 డిగ్రీల కోణంలో కలుస్తాయి, దీనితో క్రాంక్ 4 యొక్క స్లయిడర్లు 6 సంపర్కంలో ఉంటాయి.
యంత్రాంగం క్రింది విధంగా పనిచేస్తుంది. ఒక కోణంలో క్రాంక్ 4 ను తిరిగేటప్పుడు 2𝝅
స్లయిడర్లు 6 పొడవైన కమ్మీలు 10 వెంట కదులుతాయి మరియు అదే సమయంలో స్లయిడ్ను ఒక కోణంలో తిప్పుతుంది 𝝅
, అందువలన, క్రాంక్ 4 నుండి రాకర్ 9 వరకు గేర్ నిష్పత్తి సమానంగా ఉంటుంది 2
. మెకానిజం రూపకల్పన స్లయిడ్ 9 నుండి క్రాంక్ 4 వరకు కదలికను ప్రసారం చేయడానికి అనుమతిస్తుంది (ఈ సందర్భంలో, షాఫ్ట్ 7 డ్రైవింగ్ అవుతుంది మరియు షాఫ్ట్ 1 నడిచేది అవుతుంది). ఈ సందర్భంలో, గేర్ నిష్పత్తి సమానంగా ఉంటుంది 0,5
.
అదనపు తో లివర్ మెకానిజమ్స్
నిర్మాణ అంశాలు
సాంకేతిక పరికరాలు మరియు ఉపకరణాలలో భాగంగా లివర్ మెకానిజమ్లను ఉపయోగించినప్పుడు, సమర్థవంతమైన ఆపరేషన్ను నిర్ధారించడానికి, అదనపు నిర్మాణ అంశాలు దానిలో నిర్మించబడతాయి, ఇది క్రింది పనులను పరిష్కరించడానికి అనుమతిస్తుంది:
- అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ విలువను సర్దుబాటు చేయండి (స్లయిడర్, లివర్, రాకర్),
- అవుట్పుట్ లింక్ యొక్క ప్రారంభ (చివరి) స్థానాన్ని సర్దుబాటు చేయండి,
- మెకానిజం భాగాలను నష్టం నుండి రక్షించండి,
− అవుట్పుట్ లింక్కు సంక్లిష్ట కదలికను తెలియజేయండి
- యంత్రాంగాన్ని ఆన్ మరియు ఆఫ్ చేయండి,
అటువంటి లివర్ మెకానిజమ్స్ యొక్క నిర్మాణాత్మక అమలు యొక్క ఉదాహరణలను పరిశీలిద్దాం. లివర్ మెకానిజం యొక్క అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ విలువ యొక్క నియంత్రణ రెండు మార్గాల్లో నిర్వహించబడుతుంది, లివర్ ఆయుధాల నిష్పత్తిని మార్చడం ద్వారా లేదా డ్రైవ్ క్రాంక్ యొక్క విపరీత విలువను మార్చడం ద్వారా.

అత్తి 23 దాని ప్రముఖ చేయి పొడవును సర్దుబాటు చేయడానికి మిమ్మల్ని అనుమతించే పరికరం యొక్క రూపకల్పన.
లైట్-లోడ్ లివర్ మెకానిజం యొక్క లివర్లో నిర్మించిన పరికరం యొక్క రూపకల్పనను మూర్తి 23 చూపిస్తుంది, ఇది దాని ప్రముఖ చేయి యొక్క పొడవును సర్దుబాటు చేయడానికి మిమ్మల్ని అనుమతిస్తుంది. ఈ లివర్, లీడింగ్ 1 మరియు నడిచే 2 చేతులతో మరియు అక్షం 3పై అమర్చబడి, అంతర్నిర్మిత పిన్ 6ని కలిగి ఉంది, అక్షం 5 ద్వారా డ్రైవింగ్ రాడ్ 4కి కనెక్ట్ చేయబడింది మరియు గాడి 10లో అవసరమైన స్థానంలో స్థిరంగా ఉంటుంది మరియు సర్దుబాటు స్క్రూ 7 ఉంటుంది. దాని థ్రెడ్ రంధ్రంలోకి చొప్పించబడింది. ఈ సందర్భంలో, లివర్ యొక్క నడిచే చేయి 2 అక్షం 8 ద్వారా లివర్ మెకానిజం యొక్క నడిచే లింక్కు కీలుతో అనుసంధానించబడి ఉంటుంది. లివర్ యొక్క లీడింగ్ ఆర్మ్ 1 యొక్క పొడవును సర్దుబాటు చేసేటప్పుడు, గింజ 9 మరను విప్పుతుంది, ఆపై పిన్ 6 సర్దుబాటు స్క్రూ 7ని ఉపయోగించి లివర్ యొక్క లీడింగ్ ఆర్మ్ 1 యొక్క గాడి వెంట ఒక వైపు లేదా మరొక వైపుకు తరలించబడుతుంది, ఆపై పిన్ 6 తరువాత గింజ 9తో లాక్ చేయబడింది.
అత్తి 24 దాని అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ను సర్దుబాటు చేయడానికి పరికరంతో క్రాంక్ మెకానిజం రూపకల్పన
మూర్తి 24 దాని అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ను సర్దుబాటు చేయడానికి అంతర్నిర్మిత పరికరంతో క్రాంక్ మెకానిజం రూపకల్పనను చూపుతుంది, ఇది డ్రైవ్ ఆర్మ్ యొక్క సర్దుబాటు పొడవుతో ఇంటర్మీడియట్ డబుల్ ఆర్మ్ లివర్ రూపంలో తయారు చేయబడింది. ఇందులో డ్రైవ్ ఉంటుంది. క్రాంక్ షాఫ్ట్ 1, క్రాంక్పై కనెక్ట్ చేసే రాడ్ 2 ఇన్స్టాల్ చేయబడి ఉంది, అక్షం 3 ద్వారా పివోటల్గా కనెక్ట్ చేయబడిన ఇంటర్మీడియట్ డబుల్ ఆర్మ్ లివర్ 5తో ఫ్రేమ్పై అక్షం 6 ద్వారా మౌంట్ చేయబడింది మరియు అక్షం 7 ద్వారా నడిచే రాడ్కు కనెక్ట్ చేయబడింది 8. వద్ద అదే సమయంలో, అక్షం 9 ద్వారా ఇంటర్మీడియట్ లివర్ 5లో, ఒక సీసం స్క్రూ 10 అతుక్కొని అమర్చబడి ఉంటుంది, దానిపై ఒక గింజ ఉంది (అంజీర్. 34లోని గింజ చూపబడలేదు) కనెక్ట్ చేసే రాడ్ 2 యొక్క అక్షం 3కి కీలకంగా అనుసంధానించబడి ఉంటుంది. ఇంటర్మీడియట్ లివర్ యొక్క వ్యాసార్థం గాడి 4లో స్లయిడర్ లాగా కదలగల సామర్థ్యం 5. ప్రధాన స్క్రూ 10 తిరిగినప్పుడు, కనెక్ట్ చేసే రాడ్ 2 కోణంలో తిరుగుతుంది αi ఇది ఇంటర్మీడియట్ లివర్ 5 యొక్క లీడింగ్ ఆర్మ్ యొక్క పరిమాణంలో మార్పుకు దారితీస్తుంది మరియు దాని నడిచే మరియు డ్రైవింగ్ ఆయుధాల పొడవు యొక్క మారుతున్న నిష్పత్తి మెకానిజం యొక్క నడిచే రాడ్ 8 యొక్క స్ట్రోక్ విలువను మార్చడం సాధ్యం చేస్తుంది. మెకానిజం యొక్క అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ను సర్దుబాటు చేయడానికి పరిగణించబడిన పరికరం ముందుగా చర్చించిన దాని నుండి అనుకూలంగా భిన్నంగా ఉంటుంది, ఇది సర్దుబాట్లు చేసేటప్పుడు, అవుట్పుట్ లింక్ (రాడ్ 8) యొక్క ప్రారంభ స్థానాన్ని నిర్వహించడానికి అనుమతిస్తుంది, ఇది ఉనికి ద్వారా నిర్ధారిస్తుంది. వ్యాసార్థం గాడి 4 యొక్క ఇంటర్మీడియట్ లివర్ 5, దీని కేంద్రం క్రాంక్ షాఫ్ట్ 1 యొక్క అక్షంతో సమానంగా ఉంటుంది, కాబట్టి, సర్దుబాట్లు చేసేటప్పుడు, కనెక్ట్ చేసే రాడ్ 2ని తిప్పడం ఇంటర్మీడియట్ లివర్ 5 యొక్క స్థానాన్ని మార్చదు.

అన్నం. 25. ఎక్సెంట్రిక్ షాఫ్ట్ డిజైన్, సర్దుబాటు చేయగల అసాధారణ విలువతో.
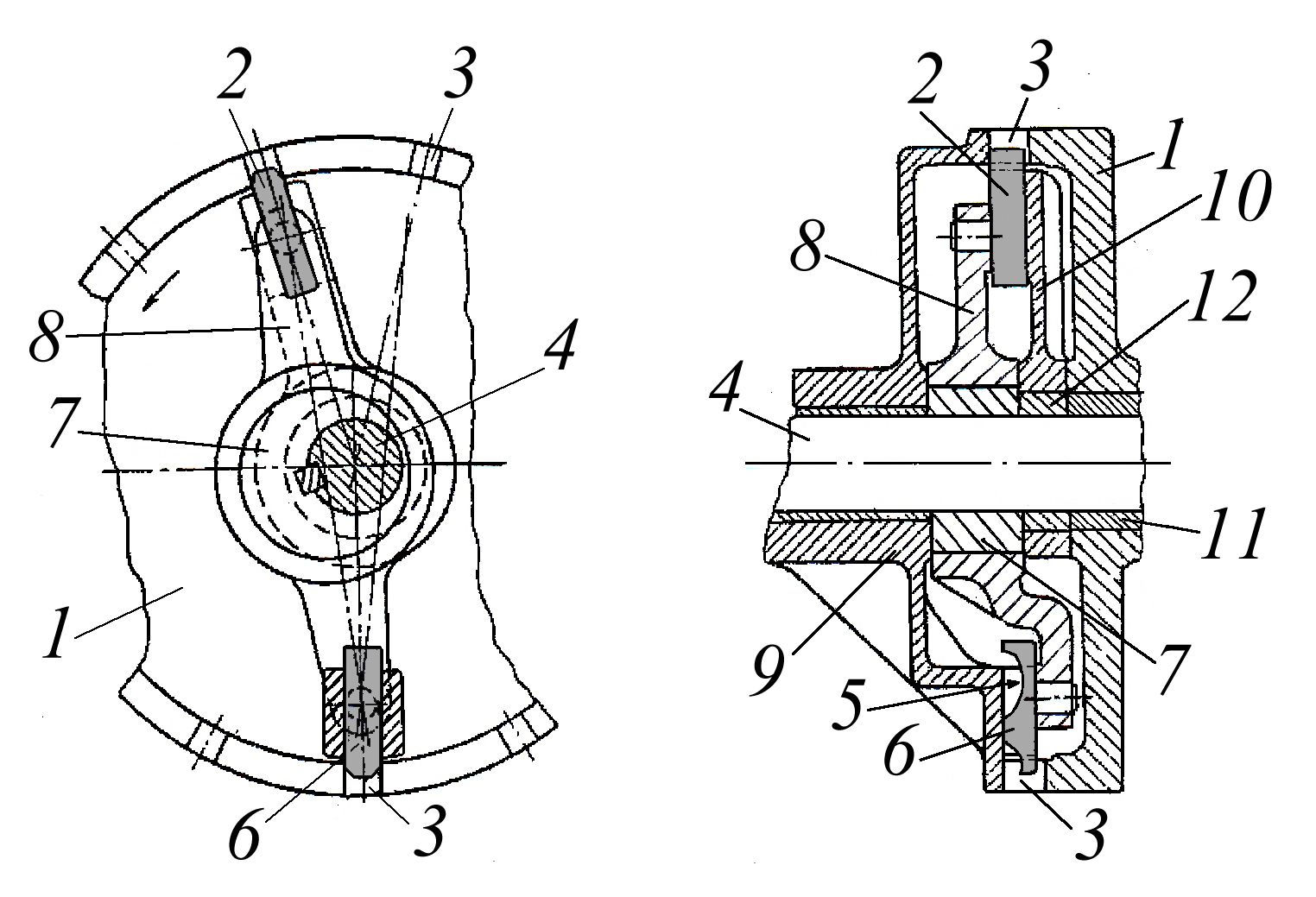
అంజీర్లో. 25 ఒక అసాధారణ షాఫ్ట్ యొక్క రూపకల్పనను చూపుతుంది, దీనిలో షాఫ్ట్ యొక్క సంబంధిత ఉపరితలంపై ఇన్స్టాల్ చేయబడిన అసాధారణ స్లీవ్ను తిప్పడం ద్వారా దాని అసాధారణత సర్దుబాటు చేయబడుతుంది. విపరీత షాఫ్ట్ యొక్క ప్రతిపాదిత డిజైన్ షాఫ్ట్ 2ని కలిగి ఉంటుంది, ఇందులో అసాధారణ మెడ 1లో ఒక అసాధారణ స్లీవ్ 3 ఉంటుంది, లోపలి స్థూపాకార ఉపరితలంపై పొడవైన కమ్మీలు 4 ఉంటుంది, దీనిలో కీ 5 సరిపోయేలా ఉంటుంది, ఇది గాడి 8లో ఉంది. అసాధారణ మెడ 1 మరియు వేళ్లపై విశ్రాంతి 6 స్ప్రింగ్లచే స్ప్రింగ్-లోడ్ చేయబడినవి 7 ఈ సందర్భంలో, 9 మరియు 10 రింగ్లు కీ 5 యొక్క చివర్లలో వ్యవస్థాపించబడ్డాయి, వీటిలో ప్రతి ఒక్కదానిపై 11 లోపల ఒక స్పిరిల్ ఉపరితలంతో పరిమితం చేయబడింది 16 తో గాడి ఎత్తుకు సమానమైన గరిష్ట లోతు 4. రింగ్స్ 9 మరియు 10 యొక్క అక్షసంబంధ స్థిరీకరణ మరియు అసాధారణమైన పొడవైన కమ్మీలలో అసాధారణ బుషింగ్ 3 కోసం షాఫ్ట్ 2 యొక్క జర్నల్స్ 1 సగం రింగులు 12తో అమర్చబడి ఉంటాయి, వాటిలో కఠినంగా స్థిరంగా ఉంటాయి, మరియు రేడియల్ దిశలో స్థిరీకరణ కోసం, 9 మరియు 10 రింగులలో స్ప్రింగ్-లోడెడ్ బాల్ క్లాంప్లు 13 మౌంట్ చేయబడతాయి. రింగులను తిప్పడానికి, రంధ్రాలు 14 వాటిలో తయారు చేయబడతాయి మరియు అసాధారణ స్లీవ్ 3 యొక్క భ్రమణ కోసం, రంధ్రాలు 15 దానిలో తయారు చేయబడతాయి. .
అసాధారణ స్లీవ్ 3 క్రింది విధంగా సర్దుబాటు చేయబడింది. 9 మరియు 10 రింగ్లు రాడ్ లేదా క్రౌబార్ చొప్పించబడిన రంధ్రాల ద్వారా తిప్పబడతాయి, దీనిలో కీ 5 పూర్తిగా అసాధారణ స్లీవ్ 3 యొక్క గాడి 4 నుండి తీసివేయబడుతుంది. దీని తర్వాత, అసాధారణ స్లీవ్ 3 అవసరమైన కోణంలో తిప్పబడుతుంది. దీని ఫలితంగా షాఫ్ట్ 2 యొక్క విపరీతత విలువ మారుతుంది. తర్వాత 9 మరియు 10 రింగ్లు ఒకే విధంగా తిప్పబడతాయి, కీ 5 అసాధారణ బుషింగ్ యొక్క సంబంధిత గాడి 4లోకి మరియు రింగులలోని గూడ 11లోకి ప్రవేశించే వరకు, విశ్రాంతి సమయంలో గూడ యొక్క సంబంధిత వంపుతిరిగిన ఉపరితలంపై దాని వంపుతిరిగిన వైపు ఉపరితలం 11. ఇది అసాధారణ బుషింగ్ 3 చివరల స్థానాన్ని సర్దుబాటు చేసే ప్రక్రియ.
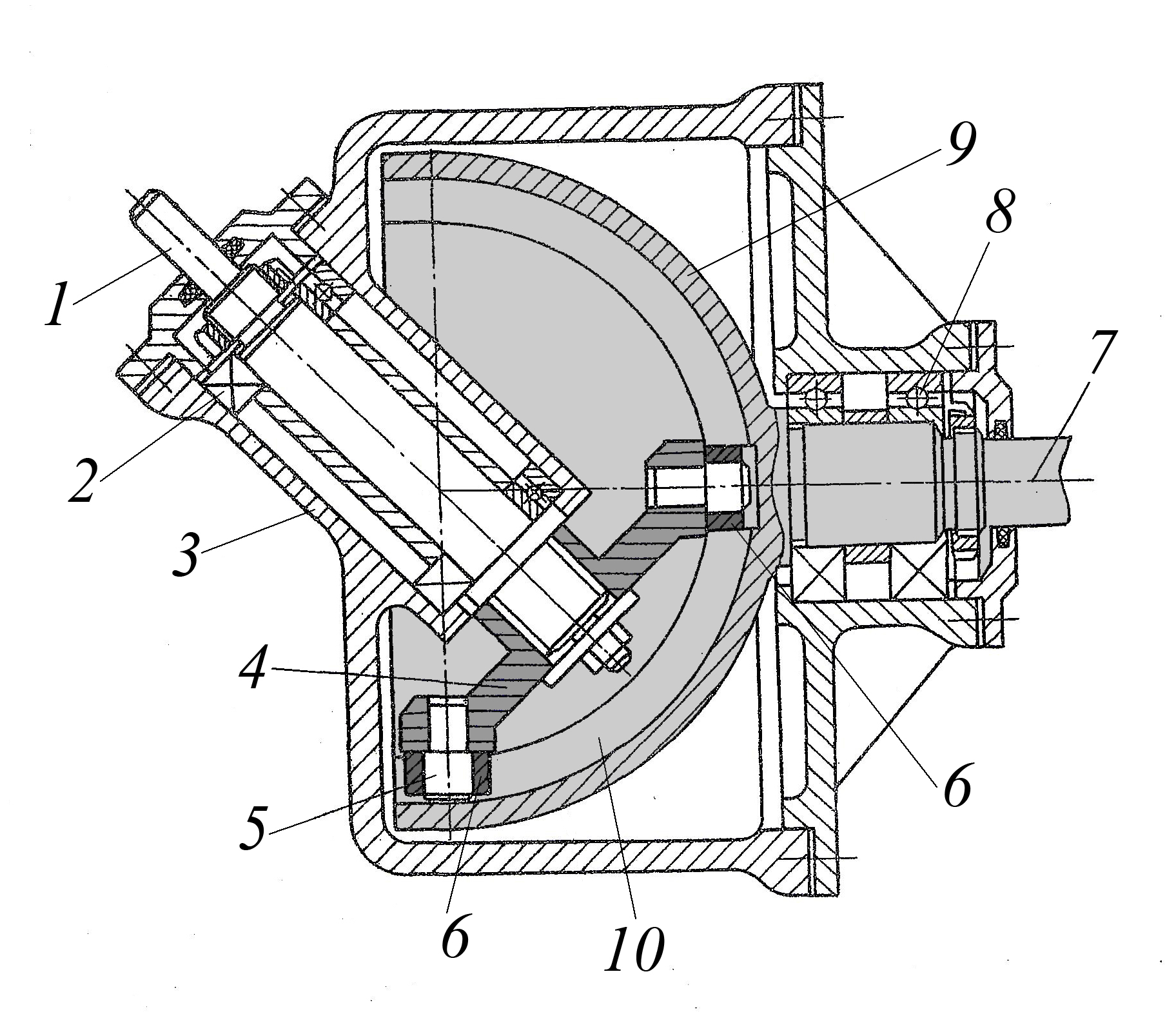
అన్నం. 26. అసాధారణ షాఫ్ట్ యొక్క అసాధారణత యొక్క మృదువైన సర్దుబాటు కోసం చీలిక పరికరం రూపకల్పన.
అంజీర్లో. మూర్తి 26 అసాధారణ షాఫ్ట్ యొక్క విపరీతతను సజావుగా సర్దుబాటు చేయడానికి చీలిక పరికరం యొక్క రూపకల్పనను చూపుతుంది. ఇది డ్రైవ్ షాఫ్ట్ 1ని కలిగి ఉంటుంది, దానిపై చీలికలు 2 మరియు 3 అమర్చబడి ఉంటాయి, వాటి చీలిక ఉపరితలాలు చీలిక 4 మరియు 5 యొక్క సంభోగం ఉపరితలాలతో సంబంధం కలిగి ఉంటాయి, ఇవి అసాధారణ 6 మరియు రేఖాంశ పొడవైన కమ్మీలలో అక్షసంబంధ కదలికను కలిగి ఉంటాయి. ఫ్లాంజ్ 7 యొక్క సంబంధిత పొడవైన కమ్మీలలో రేడియల్ కదలిక, రెండోది షాఫ్ట్ యొక్క థ్రెడ్ భాగంలో ఉన్న గింజ 9 ద్వారా అక్షసంబంధ కదలిక అవకాశంతో షాఫ్ట్ 1 పై అమర్చబడుతుంది. ఈ సందర్భంలో, ఎక్సెంట్రిక్ 6 ఒక గింజ 8 ద్వారా అక్షసంబంధ దిశలో షాఫ్ట్ 1 పై స్థిరంగా ఉంటుంది మరియు గింజ 9 సగం రింగులు 10, 11 మరియు స్క్రూలు 12 ఉపయోగించి అంచు 7కి కనెక్ట్ చేయబడింది.
పరికరం క్రింది విధంగా పనిచేస్తుంది. విపరీత షాఫ్ట్ 1 యొక్క విపరీతతను మార్చడం అవసరమైతే, గింజ 9ని తిప్పడం ద్వారా, ఫ్లాంజ్ 7ని కావలసిన దిశలో తరలించండి, అయితే చీలికలు 4 మరియు 5, చీలిక 2 మరియు 3 యొక్క సంభోగం ఉపరితలాల వెంట స్లైడింగ్ అవుతాయి. షాఫ్ట్ 1, ఫ్లాంజ్ 7తో కలిసి అక్షసంబంధ దిశలో కదలండి మరియు దానిలో చేసిన గాడి ఉపరితలం వెంట రేడియల్గా స్లైడింగ్ చేయండి. చీలికల 4 మరియు 5 యొక్క అటువంటి కదలిక ఫలితంగా, అసాధారణమైన 6 రేడియల్ దిశలో కదులుతుంది, అసాధారణ షాఫ్ట్ యొక్క విపరీతతను పెంచుతుంది లేదా తగ్గిస్తుంది.
లివర్ మెకానిజం యొక్క అవుట్పుట్ లింక్ స్లయిడర్ అయితే, దాని ప్రారంభ లేదా చివరి స్థానం దానికి అనుసంధానించబడిన కనెక్టింగ్ రాడ్ యొక్క పొడవును మార్చడం ద్వారా సర్దుబాటు చేయబడుతుంది మరియు లివర్ మెకానిజం యొక్క అవుట్పుట్ లింక్ లివర్ లేదా రాకర్ ఆర్మ్ అయితే, దాని కోణీయ స్థానం సర్దుబాటు చేయబడింది. లివర్ మెకానిజం యొక్క అవుట్పుట్ లింక్ యొక్క స్థానాన్ని సర్దుబాటు చేయడానికి పరికరాల రూపకల్పన యొక్క ఉదాహరణలను చూద్దాం.

అత్తి 27 ప్రారంభ సర్దుబాటుతో లివర్ మెకానిజం
అవుట్పుట్ లింక్ స్థానం
మూర్తి 27 ఒక లివర్ మెకానిజం రూపకల్పనను చూపుతుంది, దీనిలో అసాధారణ షాఫ్ట్ నుండి పషర్కు చలన ప్రసారం ఇంటర్మీడియట్ డబుల్ ఆర్మ్ లివర్ ద్వారా నిర్వహించబడుతుంది. ఇది ఒక అసాధారణ షాఫ్ట్ 1, ఒక కనెక్టింగ్ రాడ్ను కలిగి ఉంటుంది, ఇది అసాధారణ షాఫ్ట్ యొక్క క్రాంక్ పిన్పై అమర్చబడిన హౌసింగ్ 2 మరియు రాడ్ 3, దీని థ్రెడ్ చివరలు ఒకదానికొకటి థ్రెడ్ కప్లింగ్ 4 ద్వారా అనుసంధానించబడి ఉంటాయి, దీని స్థానం లాక్నట్లు 5 ద్వారా పరిష్కరించబడింది, అలాగే డబుల్ ఆర్మ్ లివర్ 7, అక్షం 8పై కీలకంగా మౌంట్ చేయబడింది, దీని నడిచే చేయిపై రోలర్ 10ని అక్షం 9పై ఇన్స్టాల్ చేస్తారు, ఇది పుషర్ 11తో నిరంతరం సంబంధంలో ఉంటుంది. ఈ డిజైన్ కనెక్ట్ చేసే రాడ్ దాని పొడవును సర్దుబాటు చేయడం ద్వారా, బాడీ 2 యొక్క థ్రెడ్ చివరలను స్క్రూ చేయడం లేదా అన్స్క్రూ చేయడం ద్వారా మరియు కప్లింగ్ 4 లోకి రాడ్ 3ని అనుమతిస్తుంది, స్థానం లివర్ 7ని మార్చడానికి మరియు తదనుగుణంగా, పషర్ 11 యొక్క ప్రారంభ స్థానం, ఏమిటి పరికరాలలో భాగంగా యంత్రాంగాన్ని ఏర్పాటు చేసేటప్పుడు ఇది అవసరమా?

అత్తి 28 కనెక్ట్ చేసే రాడ్ యొక్క పొడవును మార్చడానికి ఒక పరికరంతో క్రాంక్ మెకానిజం
మూర్తి 28 ప్రెస్ యొక్క క్రాంక్ షాఫ్ట్-కనెక్టింగ్ రాడ్ మెకానిజం రూపకల్పనను చూపుతుంది, దీనిలో స్లయిడర్ యొక్క ప్రారంభ స్థానం కనెక్ట్ చేసే రాడ్ యొక్క పొడవును మార్చడం ద్వారా సర్దుబాటు చేయబడుతుంది. ఇది క్రాంక్ షాఫ్ట్ యొక్క క్రాంక్ జర్నల్ 3లో ఇన్స్టాల్ చేయబడిన కనెక్టింగ్ రాడ్ 1ని కలిగి ఉంటుంది మరియు క్రాంక్ మెకానిజం యొక్క స్లయిడర్ 5కి ఒక అసాధారణ బుషింగ్ 2 మరియు దాని రంధ్రంలో ఉన్న ఒక అక్షం 4 ద్వారా కనెక్ట్ చేయబడింది, అయితే ఎక్సెంట్రిక్ బుషింగ్ యొక్క కంటి 7లో 3 a బషింగ్ 9తో అక్షం 8 అతుక్కొని మౌంట్ చేయబడింది, సర్దుబాటు స్క్రూ 10 ఉన్న దాని నుండి దూరంగా థ్రెడ్ తరలింపులో ఉంది. స్క్రూ 10 యొక్క బాల్ సపోర్ట్ 12 థ్రస్ట్ బేరింగ్ 15పై గ్లాస్ 14లో ఇన్స్టాల్ చేయబడింది మరియు కవర్ 17 ద్వారా పరిష్కరించబడుతుంది. , స్క్రూ యొక్క స్క్వేర్ షాంక్ 16 కవర్ 17లోని రంధ్రం గుండా వెళుతుంది. కనెక్ట్ చేసే రాడ్ 1 క్రాంక్షాఫ్ట్ యొక్క క్రాంక్పిన్ 3తో స్లైడింగ్ బేరింగ్ 18 ద్వారా, స్లైడింగ్ బేరింగ్ 19 ద్వారా అసాధారణ బుషింగ్ 2తో మరియు స్లైడింగ్ బేరింగ్ 20 ద్వారా అక్షం 4తో అసాధారణ బుషింగ్ 2తో సంబంధం కలిగి ఉంటుంది. అక్ష దిశలో, అక్షం 4 ఉతికే యంత్రం 21 మరియు బోల్ట్లు 22తో పరిష్కరించబడింది.
కనెక్ట్ చేసే రాడ్ 1 యొక్క పొడవును మార్చడానికి, సర్దుబాటు చేసే స్క్రూ 10 స్క్వేర్ హెడ్ 16 ద్వారా కావలసిన దిశలో తిప్పబడుతుంది, ఇది థ్రెడ్ స్లీవ్ 9 నుండి స్క్రూ చేయబడినప్పుడు లేదా విప్పబడినప్పుడు, అక్షం 4 చుట్టూ తిప్పడానికి అసాధారణ స్లీవ్ 2ని బలవంతం చేస్తుంది. , మరియు తద్వారా దాని అక్షం యొక్క స్థానాన్ని మారుస్తుంది, పొడవుగా లేదా కనెక్ట్ చేసే రాడ్ 1 ను తగ్గించడం ద్వారా, ఇది స్లయిడర్ 5 యొక్క ప్రారంభ స్థానంలో మార్పుకు దారితీస్తుంది.
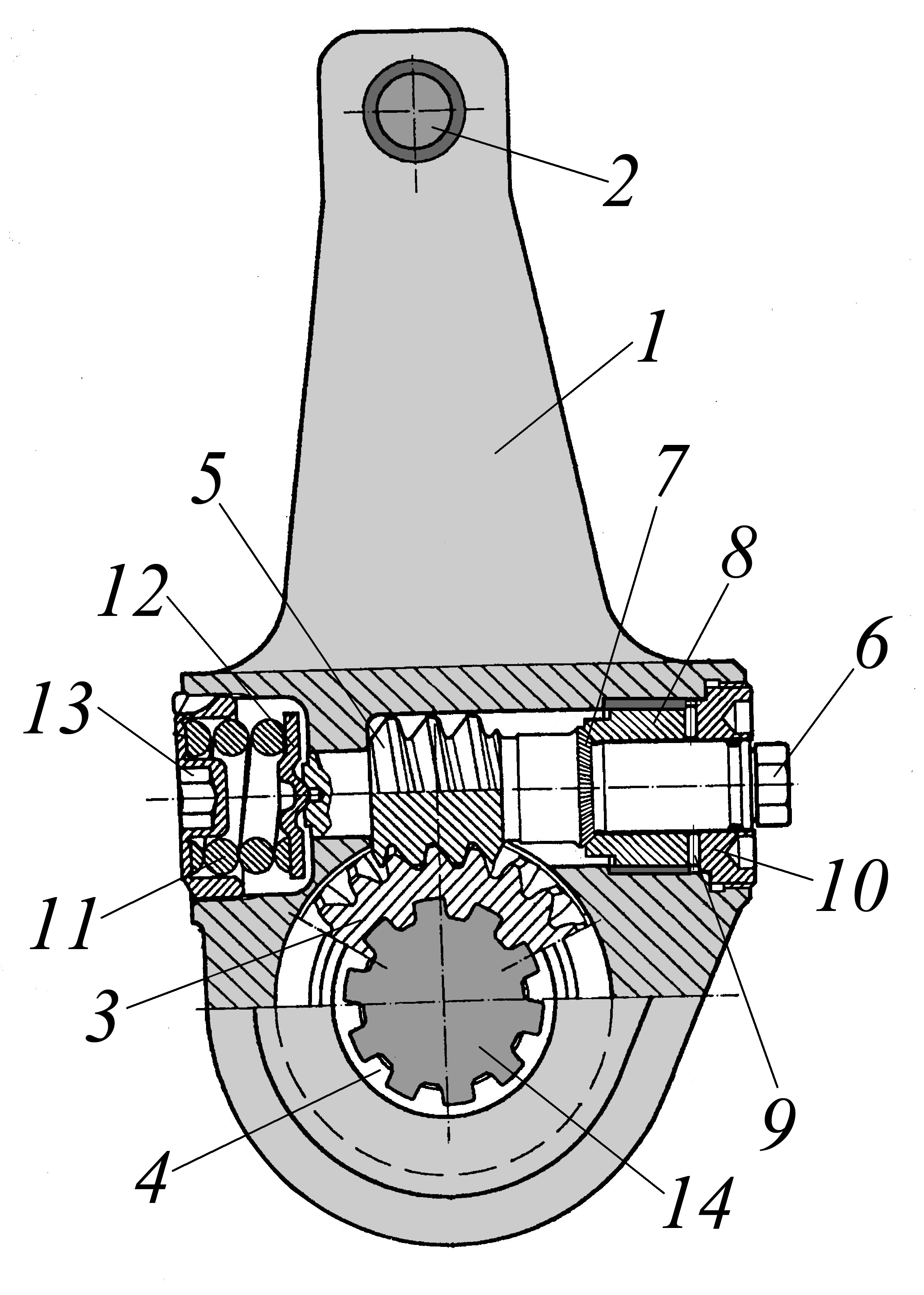
Fig. 29 దాని కోణీయ స్థానం సర్దుబాటు కోసం అంతర్నిర్మిత పరికరంతో రాకర్
మూర్తి 29 రాకర్ ఆర్మ్లో నిర్మించిన పరికరం యొక్క రూపకల్పనను చూపుతుంది, ఇది ఇన్స్టాల్ చేయబడిన అక్షానికి సంబంధించి దాని కోణీయ స్థానాన్ని సర్దుబాటు చేయడానికి మిమ్మల్ని అనుమతిస్తుంది. ఈ పరికరం, రాకర్ ఆర్మ్ 1లో నిర్మించబడింది, ఇది అక్షం 2 ద్వారా లివర్ మెకానిజం యొక్క డ్రైవ్ రాడ్కు కీలకంగా అనుసంధానించబడి ఉంది, ఇది రాకర్ ఆర్మ్ యొక్క బోర్లో ఉన్న వార్మ్ వీల్ 3ని కలిగి ఉంటుంది మరియు దాని అంతర్గత స్ప్లైన్లతో 4 స్ప్లైన్డ్ను సంప్రదిస్తుంది. అక్షం 14 యొక్క ఉపరితలం, మరియు రాకర్ ఆర్మ్ యొక్క బోరింగ్లో ఇన్స్టాల్ చేయబడిన వార్మ్ 5తో కూడా నిమగ్నమై, వార్మ్ వీల్ యొక్క అక్షానికి లంబంగా తయారు చేయబడింది. ఈ సందర్భంలో, వార్మ్ 5 యొక్క ఎడమ జర్నల్ షట్కోణ ముగింపు 6 తో కవర్ 10 లోని రంధ్రంలో ఉంచబడుతుంది, రోలర్లు 9 సెట్ ద్వారా, స్లీవ్ 8 తో సంబంధం కలిగి ఉంటుంది, దాని కుడి చివర శంఖాకార దంతాలు ఉన్నాయి. 7, ఇది వార్మ్ 5పై చేసిన సంభోగం పళ్ళతో సంపర్కం చెంది, నిశ్చితార్థాన్ని ఏర్పరుస్తుంది. వార్మ్ 5 యొక్క ఎడమ చివర దాని కేంద్ర శంఖాకార రంధ్రంతో సాగే వాషర్ 12 యొక్క సంభోగం ఉపరితలంతో సంబంధం కలిగి ఉంటుంది, ఇది స్ప్రింగ్ 11 మరియు కవర్ 13 ద్వారా ఒత్తిడి చేయబడుతుంది.
అక్షం 14 కి సంబంధించి రాకర్ 1 యొక్క కోణీయ స్థానం యొక్క సర్దుబాటు క్రింది విధంగా నిర్వహించబడుతుంది. రాకర్ 1 ను ఒక దిశలో లేదా మరొక వైపుకు తిప్పడానికి, వార్మ్ 5 షట్కోణ తల 6 ద్వారా కావలసిన దిశలో రెంచ్తో తిప్పబడుతుంది, అయితే దాని భ్రమణం వార్మ్ వీల్ 3కి ప్రసారం చేయబడుతుంది, ఇది స్ప్లైన్డ్ కనెక్షన్ ద్వారా పరిష్కరించబడుతుంది. షాఫ్ట్ 14లో, కదలకుండా ఉంటుంది మరియు రాకర్ 1 కావలసిన దిశ వైపు తిరుగుతుంది, షాఫ్ట్ 14కి సంబంధించి దాని కోణీయ స్థానాన్ని మారుస్తుంది.
సాంకేతిక పరికరాల యాక్యుయేటర్లు, ప్రత్యేకించి మెకానికల్ ప్రెస్లు, క్రాంక్ మరియు కనెక్ట్ చేసే రాడ్ మెకానిజమ్ల స్లైడర్లు, పరికరాల మూల భాగానికి సంబంధించి వాటి స్థానం మరియు కదలిక కోసం కఠినమైన అవసరాలకు లోబడి ఉంటాయి (మెకానికల్ ప్రెస్ కోసం ఇది అవసరం. పట్టిక యొక్క ఆధార ఉపరితలానికి స్లయిడర్ స్ట్రోక్ లంబంగా ఉంటుంది), కాబట్టి స్లయిడర్ గైడ్లు వాటి స్థానాన్ని సర్దుబాటు చేయడానికి తగిన పరికరాలను కలిగి ఉంటాయి.

అత్తి 30 స్లయిడర్ యొక్క స్థానాన్ని సర్దుబాటు చేయడానికి మిమ్మల్ని అనుమతించే పరికరం యొక్క రూపకల్పన
రెండు విమానాలలో.
మూర్తి 30 రెండు విమానాలలో స్లయిడర్ యొక్క స్థానాన్ని సర్దుబాటు చేయడానికి మిమ్మల్ని అనుమతించే పరికరం యొక్క రూపకల్పనను చూపుతుంది. ఈ పరికరం స్లయిడ్ 10 యొక్క 4 గైడ్లను కలిగి ఉంది, రెండు విమానాలలో సర్దుబాటు చేసే అవకాశంతో ఫ్రేమ్ 1లో ఇన్స్టాల్ చేయబడింది, అలాగే గైడ్ 4 యొక్క థ్రెడ్ హోల్లో ఇన్స్టాల్ చేయబడిన థ్రెడ్ బుషింగ్ 3, దీని ద్వారా ఫ్రేమ్ 1తో సంబంధం కలిగి ఉంటుంది. ఒక గోళాకార వాషర్ 7 మరియు పిన్ 14, అలాగే ఆకారపు వాషర్ 9, షట్కోణ తల మరియు దీర్ఘచతురస్రాకార ప్రోట్రూషన్లను కలిగి ఉంటుంది, ఇవి థ్రెడ్ బుషింగ్ 3 మరియు నట్ 12లో సంభోగం పొడవైన కమ్మీలతో సంబంధంలో గైడ్లుగా పనిచేస్తాయి. గైడ్ల స్థానాన్ని సర్దుబాటు చేయడానికి ఫ్రంటల్ ప్లేన్, స్క్రూ 8ని విప్పు మరియు ఆకారపు వాషర్ 9ని తిప్పడం ద్వారా, అక్షం 2 యొక్క థ్రెడ్ రంధ్రంలో బుషింగ్ 3ని తరలించండి, ఇది గైడ్ 4 యొక్క మార్పు స్థానానికి దారి తీస్తుంది. అవసరమైన మొత్తం సర్దుబాటును పూర్తి చేసిన తర్వాత, స్క్రూ 8 బిగించబడింది. ముందు భాగంలో లంబంగా ఉన్న విమానంలోని గైడ్ల స్థానాన్ని సర్దుబాటు చేయడానికి, గింజ 12 యొక్క బిగింపు వదులుతుంది మరియు అదే విధంగా, ఆకారపు గింజ 9ని తిప్పడం ద్వారా, గైడ్ 4 అవసరమైన మొత్తానికి తరలించబడుతుంది, దాని తర్వాత గింజ 12 కఠినతరం చేయబడుతుంది.
సాంకేతిక పరికరాలలో భాగంగా పనిచేసే క్రాంక్ మెకానిజంలో, ఎక్సెంట్రిక్ షాఫ్ట్ యొక్క క్రాంక్ జర్నల్ ఎగువ మరియు దిగువ బిందువుకు సంబంధించి ± 15 డిగ్రీల ప్రాంతంలో తిప్పబడినప్పుడు గరిష్ట శక్తి ఏర్పడుతుంది, దీని ఫలితంగా టార్క్ ఉండదు. గరిష్టంగా మరియు అందువల్ల భద్రతా పరికరాల యొక్క తెలిసిన నమూనాలు (మెకానిజం డ్రైవ్లో నిర్మించిన భద్రతా బారి) సాధ్యం ఓవర్లోడ్ల నుండి దానిని రక్షించవు. దీనికి సంబంధించి, భద్రతా పరికరాలు నేరుగా క్రాంక్ మెకానిజం యొక్క లింక్లలో నిర్మించబడ్డాయి.
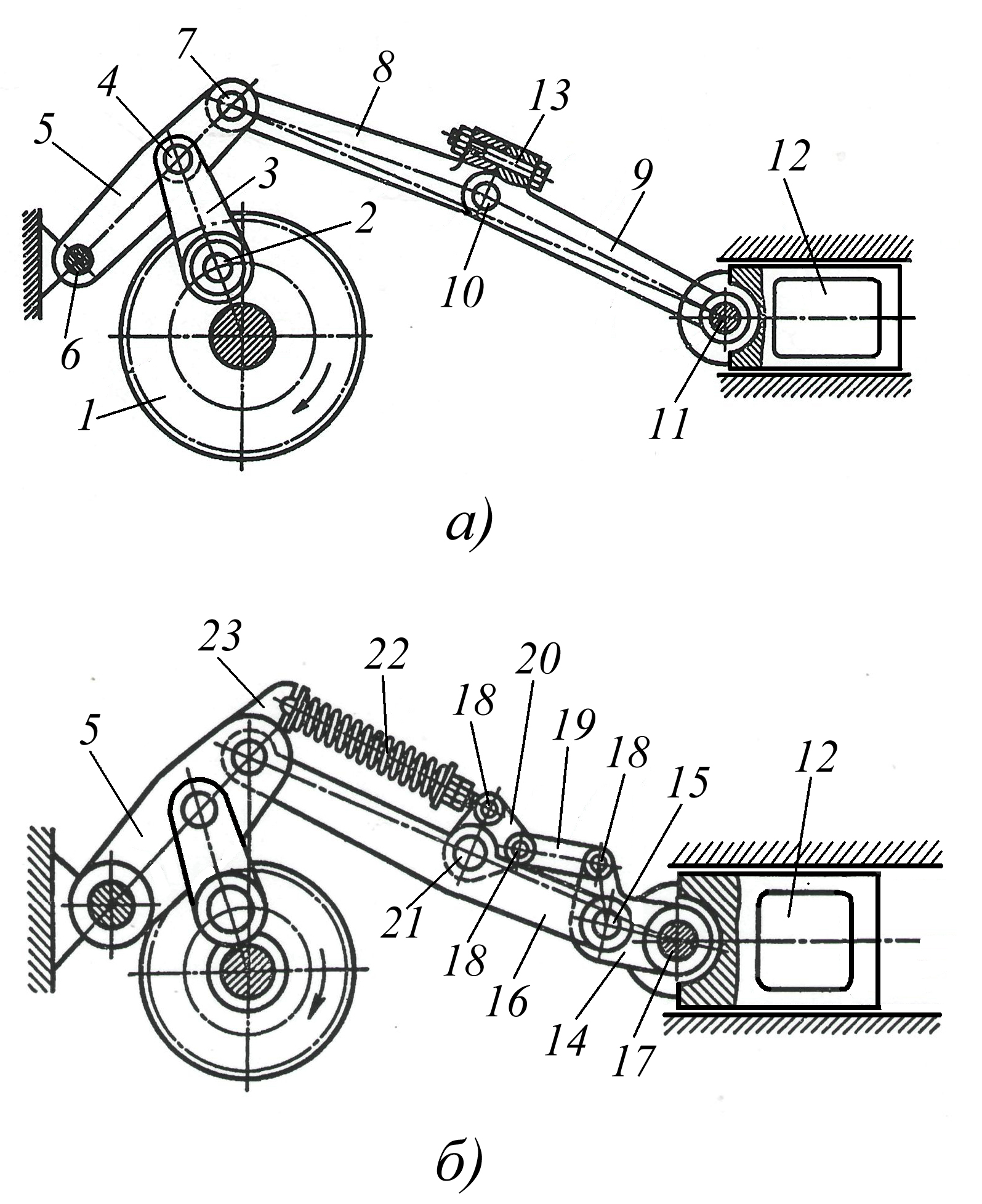
అత్తి 31 క్రాంక్ మెకానిజం యొక్క కనెక్ట్ రాడ్లో నిర్మించిన భద్రతా పరికరాల కోసం డిజైన్ ఎంపికలు.
క్రాంక్ మెకానిజం యొక్క కనెక్ట్ రాడ్లో నిర్మించిన భద్రతా పరికరాల కోసం మూర్తి 31 రెండు డిజైన్ ఎంపికలను చూపుతుంది. మెకానిజం యొక్క క్రాంక్ షాఫ్ట్ గేర్ 1 తో ఒక ముక్కలో తయారు చేయబడింది మరియు దాని క్రాంక్ పిన్ 2 కనెక్ట్ చేసే రాడ్ 3కి కీలకంగా అనుసంధానించబడి ఉంటుంది, ఇది అక్షం 4 ద్వారా ఫ్రేమ్పై అమర్చిన రాకర్ ఆర్మ్ 5కి కనెక్ట్ చేయబడింది. అక్షం 6, మరియు అక్షం 7 ద్వారా డ్రైవింగ్ పార్ట్ 8 మరియు నడిచే పార్ట్ 9తో కూడిన కనెక్టింగ్ రాడ్ అసెంబ్లీకి అనుసంధానించబడి ఉంది, ఒక యాక్సిస్ 10 ద్వారా ఒకదానికొకటి సేఫ్టీ బోల్ట్ 13తో (Fig. 31a చూడండి), కనెక్ట్ అయితే రాడ్ అక్షం 11 ద్వారా స్లయిడర్ 12కి కనెక్ట్ చేయబడింది. లోడ్ పెరిగేకొద్దీ, స్లయిడర్ 12పై పనిచేసే సేఫ్టీ బోల్ట్ అనుమతించదగిన 13 బ్రేక్లను మించిపోయింది, కనెక్ట్ చేసే రాడ్ 8 మరియు 9 భాగాలు అక్షం 10 మరియు కదలికపై ఒకదానికొకటి సాపేక్షంగా తిరుగుతాయి. క్రాంక్ షాఫ్ట్ నుండి స్లయిడర్ 12 వరకు ప్రసారం చేయబడదు, ఇది మెకానిజం యొక్క సంక్లిష్ట భాగాలు విచ్ఛిన్నం కాకుండా నిరోధించబడుతుందని నిర్ధారిస్తుంది. స్లయిడర్ 12 పై పనిచేసే శక్తి పెరుగుదలకు గల కారణాలను తొలగించిన తర్వాత మరియు భద్రతా బోల్ట్ 13ని భర్తీ చేసిన తర్వాత, యంత్రాంగం పనిచేయడం కొనసాగించవచ్చు.
మూర్తి 31b అంతర్నిర్మిత స్వీయ-రీసెట్ భద్రతా మెకానిజంతో మెకానిజం యొక్క సంస్కరణను చూపుతుంది. ఇది గొడ్డలి 15, 17 ద్వారా అనుసంధానించబడిన వన్-పీస్ కనెక్టింగ్ రాడ్ 16 మరియు స్లైడర్ 12తో ఇంటర్మీడియట్ డబుల్ ఆర్మ్డ్ లివర్ 14 మరియు గొడ్డలి 18, రాడ్ 19 మరియు డబుల్ ఆర్మ్డ్ లివర్ 20 ద్వారా లివర్ 14ని కలిగి ఉంటుంది. , కనెక్ట్ చేసే రాడ్ 16పై అక్షం 21 ద్వారా, రాకర్ ఆర్మ్ 5 యొక్క ప్రోట్రూషన్ 23కి కనెక్ట్ చేయబడిన కంప్రెషన్ స్ప్రింగ్ 22 ద్వారా 5. లోడ్ పెరిగినప్పుడు, స్లయిడర్ 12పై స్ప్రింగ్ 22 యాక్టింగ్ అనుమతించదగిన పరిమితిని మించిపోయింది మరియు అక్షం 15పై కనెక్ట్ చేసే రాడ్ 16 మరియు డబుల్ ఆర్మ్ లివర్ 14 ఒకదానికొకటి సాపేక్షంగా తిరుగుతాయి, తద్వారా క్రాంక్ షాఫ్ట్ నుండి స్లయిడర్కు కదలిక బదిలీని తొలగిస్తుంది. స్లయిడర్ 12 పై పనిచేసే శక్తి పెరుగుదలకు కారణాలను తొలగించిన తర్వాత, స్ప్రింగ్ 22 దాని అసలు స్థానానికి తిరిగి వస్తుంది, భద్రతా పరికరంలోని అన్ని భాగాలను (లివర్ 14, రాడ్ 19 మరియు లివర్ 20) తిరిగి ఇస్తుంది, దీని ఫలితంగా యంత్రాంగం పనిచేయడం కొనసాగించవచ్చు.

అన్నం. 32. వివిధ ఎత్తులలో ఉన్న కన్వేయర్ల మధ్య ఉత్పత్తిని బదిలీ చేయడానికి టిల్టర్ యాక్యుయేటర్ రూపకల్పన.
అంజీర్లో. 32 ఎత్తులో వివిధ స్థాయిలలో ఉన్న కన్వేయర్ల మధ్య ఉత్పత్తిని బదిలీ చేయడానికి టిల్టర్ రూపకల్పనను చూపుతుంది, ఇది నాలుగు-బార్ ఉచ్చరించబడిన నిర్మాణం యొక్క రూపకల్పన ప్రకారం తయారు చేయబడింది, దీనిలో నాన్-డ్రైవ్ స్థూపాకార మరియు బెవెల్ గేర్లు నిర్మించబడ్డాయి, భాగాన్ని అనుమతిస్తుంది కదిలేటప్పుడు దాని స్థానాన్ని మార్చండి. ఇది వివిధ ఎత్తులలో ఉన్న కన్వేయర్లు 2 మరియు 3 మధ్య వ్యవస్థాపించబడిన ర్యాక్ 1పై అమర్చబడింది. టిల్టర్ బదిలీ మెకానిజం నాలుగు-లింక్ కీలు రూపంలో తయారు చేయబడింది, ఇది రొటేషన్ డ్రైవ్తో ఉత్పత్తి గ్రిప్పింగ్ మెకానిజంతో ఉంటుంది. ట్రాన్స్ఫర్ మెకానిజంలో రాక్ 1 యొక్క బోర్లలో బేరింగ్లపై అమర్చబడిన అక్షం 4 మరియు షాఫ్ట్ 5 ఉంటాయి, వాటికి లివర్లు 6 మరియు 7 జతచేయబడి ఉంటాయి మరియు షాఫ్ట్ 5 యొక్క వ్యతిరేక చివరలో కౌంటర్ వెయిట్ 8 మౌంట్ చేయబడింది, ఒక గేర్ 9 మౌంట్ చేయబడింది. షాఫ్ట్ 5 మరియు ర్యాక్ 10తో మెష్ చేయబడింది, ఒక ర్యాక్ 1పై అమర్చబడిన హైడ్రాలిక్ సిలిండర్ రాడ్ 11తో కఠినంగా కనెక్ట్ చేయబడింది. 6 మరియు 7 లివర్ల వ్యతిరేక చివరలు గేర్ షాఫ్ట్ 14 మరియు అక్షం ద్వారా హౌసింగ్ 13లో కీలకంగా అమర్చబడి ఉంటాయి. 15, గేర్ షాఫ్ట్ 14 గ్రిప్పింగ్ మెకానిజం ఉత్పత్తి యొక్క భ్రమణ డ్రైవ్ యొక్క షాఫ్ట్ 16పై ఉచితంగా అమర్చబడిన గేర్ 22తో నిమగ్నమై ఉంటుంది మరియు దానికి డ్రైవర్ 21 మరియు ఫ్లాంజ్ 20 ద్వారా కనెక్ట్ చేయబడింది. ఉత్పత్తి గ్రిప్పర్ రూపంలో తయారు చేయబడింది. ఒక పిన్ 29, షాఫ్ట్ 17పై కఠినంగా మౌంట్ చేయబడింది మరియు షాఫ్ట్ 17 యొక్క భ్రమణాన్ని పరిమితం చేసే రెండు స్టాప్లు 30 మరియు 31ని కలిగి ఉంటుంది. ఉత్పత్తి గ్రిప్పర్ యొక్క రొటేషన్ డ్రైవ్ షాఫ్ట్లు 16 మరియు 17 మరియు మెషెడ్ బెవెల్ గేర్లపై అమర్చబడి ఉంటుంది మరియు 18 మరియు 19 మరియు a స్ప్రింగ్ పరికరం బ్లాక్ 24, కదిలే స్టాప్లు 25 మరియు 26 మరియు స్ప్రింగ్లు 27 మరియు 28, ఇవి గేర్ 22 యొక్క కంకణాకార గాడి 23లో ఉన్నాయి.
పరికరం క్రింది విధంగా పనిచేస్తుంది. ప్రారంభ స్థానంలో, ఒక స్థూపాకార గాజు ఆకారాన్ని కలిగి ఉన్న ఉత్పత్తి, ఎగువ కన్వేయర్ 2 యొక్క రోలర్లు 32 పై ఉంది మరియు వేలు 29 దాని రంధ్రంలోకి చొప్పించబడుతుంది. ఉత్పత్తిని దిగువ కన్వేయర్ 3కి బదిలీ చేయడానికి, హైడ్రాలిక్ సిలిండర్ 11 ఆన్ చేయబడింది మరియు ర్యాక్ 10కి కఠినంగా కనెక్ట్ చేయబడిన దాని రాడ్ ఉపసంహరించబడుతుంది, అయితే గేర్ 9 సవ్యదిశలో తిరుగుతుంది మరియు షాఫ్ట్ 5 ను అదే దిశలో తిప్పుతుంది, ఇది లివర్ 7ని మారుస్తుంది. , హౌసింగ్ 13 మరియు 29 వేలుపై ఉన్న ఉత్పత్తితో కలిసి బదిలీ మెకానిజం ఫలితంగా, ఫ్లాట్ - సమాంతర కదలికను చేస్తుంది, కాబట్టి ఉత్పత్తి క్షితిజ సమాంతర స్థానంలో కన్వేయర్ 3లోకి ప్రవేశిస్తుంది. ఏకకాలంలో మీటలు 6 మరియు 7 యొక్క భ్రమణంతో పాటు, ఉత్పత్తి 180 డిగ్రీల కోణంలో నిలువు అక్షం చుట్టూ తిరుగుతుంది, ఇది మీటలు 6 మరియు 7 యొక్క స్వింగ్ కారణంగా సంభవిస్తుంది, గేర్ షాఫ్ట్ 14 యొక్క భ్రమణ, గేర్కు ప్రసారం చేయబడుతుంది. 22 ఆపై బెవెల్ గేర్ల ద్వారా 18 మరియు 19 నుండి షాఫ్ట్ 17 వరకు, దానిపై పిన్ 29 స్థిరంగా ఉంటుంది. ఉత్పత్తి కోసం, కదలిక ప్రారంభంలో నిలువు అక్షం చుట్టూ తిరిగేటప్పుడు, ఎగువ కన్వేయర్ యొక్క రోలర్లు 32 తాకకూడదు. 2 మరియు వాటి మధ్య హామీ ఇవ్వబడిన ఖాళీని నిర్ధారించడానికి, గేర్ షాఫ్ట్ 14ని తిప్పేటప్పుడు, షాఫ్ట్ 16 22పై అమర్చబడిన గేర్ వీల్, స్ప్రింగ్ 27 యొక్క ప్రారంభ కుదింపు సమయంలో, పిన్ 29 జతచేయబడిన షాఫ్ట్ 17కి భ్రమణాన్ని ప్రసారం చేయకుండా స్వేచ్ఛగా తిరుగుతుంది. ఉత్పత్తిని కన్వేయర్ 2 పైన పెంచినప్పుడు, కంప్రెస్డ్ స్ప్రింగ్ 27 యొక్క చర్యలో కదిలే స్టాప్ 25, డ్రైవర్ 21కి శక్తిని ప్రసారం చేస్తుంది, తద్వారా షాఫ్ట్ 16 తిరిగేలా చేస్తుంది మరియు బెవెల్ గేర్లు 18 మరియు 19, షాఫ్ట్ ద్వారా పిన్ 29తో 17. కన్వేయర్ 3లో ఉత్పత్తిని ఇన్స్టాల్ చేసిన తర్వాత, దాని డ్రైవ్ ఆన్ చేయబడింది (అంజీర్ 32లో చూపబడలేదు) మరియు ఉత్పత్తి పిన్ 29ని వదిలి అవసరమైన దిశలో కదులుతుంది. ఉత్పత్తి నుండి విముక్తి పొందిన టిల్టర్ దాని అసలు స్థానానికి తిరిగి వస్తుంది మరియు హైడ్రాలిక్ సిలిండర్ 11 ఆన్ చేయబడింది; ర్యాక్ 10తో దాని రాడ్ విస్తరించి, గేర్ 9ని షాఫ్ట్ 5తో అపసవ్య దిశలో విస్తరిస్తుంది, దీని ఫలితంగా శరీరం 13తో 6 మరియు 7 లివర్లు ఉంటాయి. మరియు పిన్ 29 అదే దిశలో మలుపు. ఈ సందర్భంలో, పిన్ 29 తో షాఫ్ట్ 17 వ్యతిరేక దిశలో 180 డిగ్రీల కోణంలో తిరుగుతుంది, వసంత 28 మరియు కదిలే స్టాప్ 26 ద్వారా నిర్వహించబడుతుంది.

అన్నం. 33. క్రాంక్-కనెక్టింగ్ రాడ్ మెకానిజం రూపకల్పన, స్లయిడర్ ఒక నిర్దిష్ట వ్యవధిలో తగ్గించబడిన దానితో కలపడానికి అనుమతిస్తుంది.
స్థిరత్వానికి దగ్గరగా వేగం.
అంజీర్లో. ఫిగర్ 33 లివర్-క్రాంక్ సిస్టమ్తో కలిపి క్రాంక్ మెకానిజం రూపకల్పనను చూపుతుంది, ఇది స్లయిడర్ను నిర్దిష్ట వ్యవధిలో స్థిరంగా ఉన్న తగ్గిన వేగంతో తరలించడానికి అనుమతిస్తుంది. ఈ మెకానిజం క్రాంక్ షాఫ్ట్ 1ని కలిగి ఉంది, వీటిలో సపోర్ట్ జర్నల్లు 2 ఫ్రేమ్పై బేరింగ్లలో అమర్చబడి ఉంటాయి, డబుల్ ఆర్మ్ లివర్ 3, క్రాంక్ షాఫ్ట్ 1 యొక్క క్రాంక్ పిన్పై కీలకంగా అమర్చబడి, గొడ్డలి 6 ద్వారా ఒక చేయితో కనెక్ట్ చేయబడింది. రాడ్ 4 మరియు ఒక స్లయిడర్ 5, మరియు మరొక చేయితో రాడ్ 7తో, స్లయిడ్ 8లో ఇన్స్టాల్ చేయబడి, అక్షం 9పై స్వింగ్ చేయబడి, రాడ్ 7 కీలకంగా కనెక్ట్ చేయబడింది, అక్షం 12 కారణంగా, రాకర్ ఆర్మ్ 11తో, అక్షం 10 ద్వారా ఫ్రేమ్పై అమర్చబడింది. స్లయిడర్ 5 క్రిందికి కదులుతున్నప్పుడు, రాకర్ ఆర్మ్ 11, రాడ్ 7, స్లయిడ్ 8తో కూడిన రాకర్-లివర్ సిస్టమ్ చుట్టూ రెండు-చేతి లివర్ 3 యొక్క అదనపు భ్రమణాన్ని నిర్వహిస్తుంది. క్రాంక్ షాఫ్ట్ యొక్క క్రాంక్ పిన్ 1 సవ్యదిశలో, ఇది ఒక నిర్దిష్ట సమయంలో స్లయిడర్ యొక్క వేగం తగ్గిపోతుంది మరియు దాని విలువ స్థిరంగా ఉంటుంది. అనేక సాంకేతిక కార్యకలాపాలను నిర్వహిస్తున్నప్పుడు స్లయిడర్ యొక్క ఈ కదలిక మోడ్ అవసరం, ఉదాహరణకు, డ్రాయింగ్.
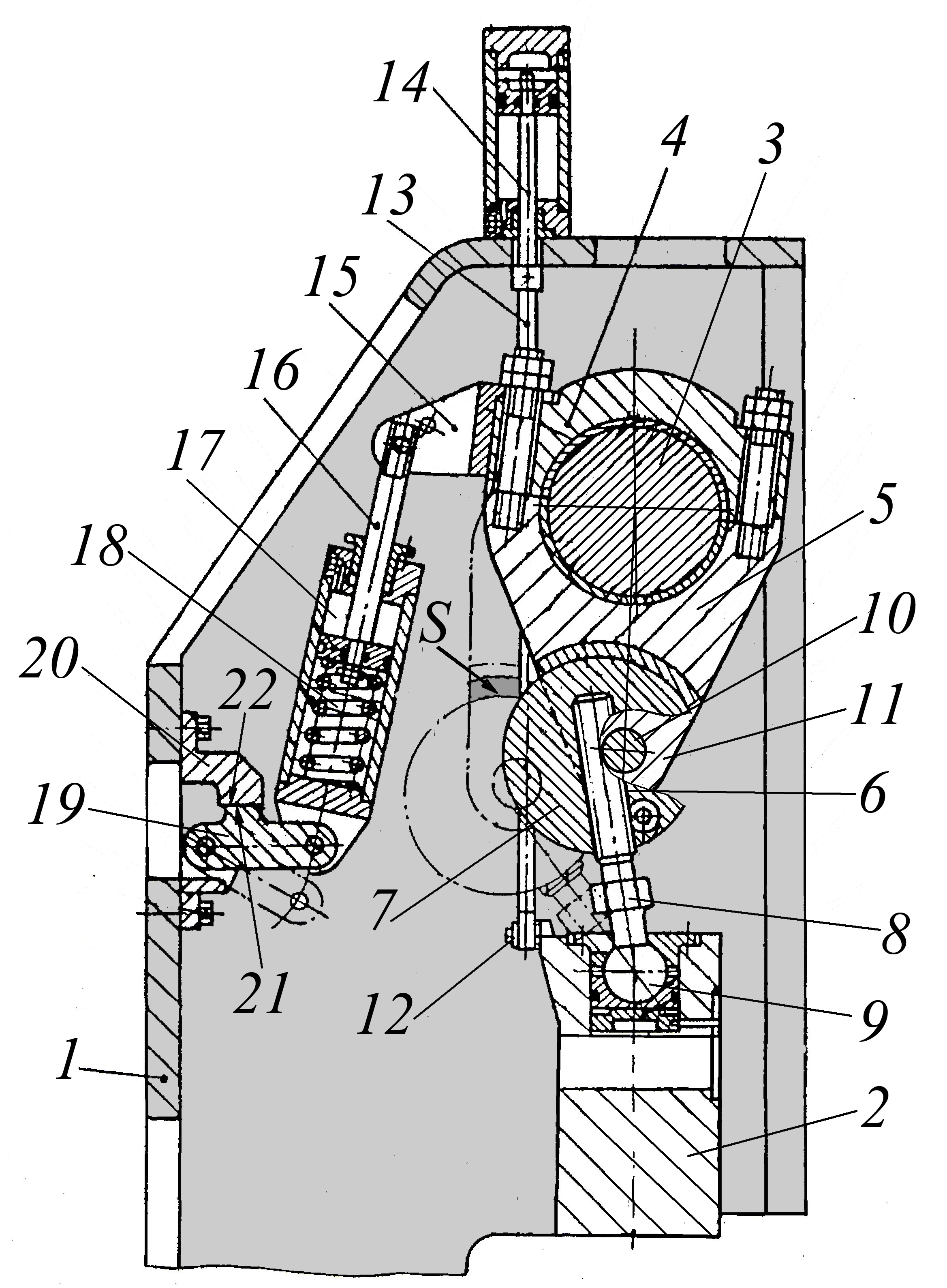
Fig. 34 క్లచ్లెస్ యాక్టివేషన్ పరికరంతో ప్రెస్ యొక్క క్రాంక్-కనెక్టింగ్ రాడ్ యాక్యుయేటర్ రూపకల్పన
క్లచ్లెస్ యాక్టివేషన్ కోసం పరికరంతో ప్రెస్ యొక్క క్రాంక్-కనెక్టింగ్ రాడ్ యాక్యుయేటర్ డిజైన్ను మూర్తి 34 చూపిస్తుంది, ఇది
బ్రేకింగ్ కనెక్ట్ రాడ్ ఆధారంగా తయారు చేయబడింది. ఇది ఫ్రేమ్ 1 యొక్క గైడ్లలో ఇన్స్టాల్ చేయబడిన స్లయిడర్ 2ని కలిగి ఉంటుంది, ఇది క్రాంక్ షాఫ్ట్ 3 నుండి అసెంబుల్డ్ కనెక్టింగ్ రాడ్ 4 ద్వారా రెసిప్రొకేటింగ్ మోషన్ డ్రైవ్ను అందుకుంటుంది, గోళాకార కీలు 9ని ఉపయోగించి స్లయిడర్ 2కి కనెక్ట్ చేయబడింది, అయితే కనెక్ట్ చేసే రాడ్ 4 కలిగి ఉంటుంది. డ్రైవింగ్ 5 మరియు నడిచే 6 మోచేయి, స్థూపాకార ఉపరితలాలు కీలు జాయింట్ను ఏర్పరుస్తాయి, రెండోది డిస్క్ 7 మరియు అడ్జస్ట్ చేసే స్క్రూ 8ని కలిగి ఉంటుంది మరియు డిస్క్ 7 అనేది యాక్సిల్స్ 10తో తయారు చేయబడింది, ఇది కళ్ళు 11 యొక్క సంబంధిత రంధ్రాలలో ఉంది. కనెక్ట్ చేసే రాడ్ యొక్క డ్రైవింగ్ పార్ట్ 5 4. అదనంగా, యాక్సిల్స్ 10 డిస్క్ 7 యొక్క అక్షానికి సంబంధించి అసాధారణంగా ఉంటాయి, ఇది డ్రైవింగ్ 5 యొక్క స్థూపాకార ఉపరితలాల మధ్య గ్యాప్ ఉనికిని నిర్ధారిస్తుంది మరియు బ్రేకింగ్ కనెక్ట్ యొక్క 6 మోకాలు రాడ్ 4, ఇది ప్రెస్ యొక్క యాక్యుయేటింగ్ క్రాంక్-కనెక్టింగ్ రాడ్ మెకానిజం యొక్క నిష్క్రియ సమయంలో అవసరం. బ్రేకింగ్ కనెక్టింగ్ రాడ్ 4 ఆఫ్ పొజిషన్లో ఉన్నప్పటికీ, అది ఎగువ ప్రారంభ స్థానంలో ఉన్నట్లు నిర్ధారించుకోవడానికి, స్లయిడర్ 2 అక్షం 12 మరియు రాడ్ 13 ద్వారా బ్యాలెన్సర్ రాడ్ 14కి కనెక్ట్ చేయబడింది. బ్రాకెట్ 15 కనెక్ట్ చేసే రాడ్ యొక్క డ్రైవింగ్ మోచేయి 5కి కఠినంగా పరిష్కరించబడింది, ఇది నియంత్రణ వాయు సిలిండర్ యొక్క రాడ్ 16కి 17 క్లచ్లెస్ యాక్టివేషన్ మెకానిజంతో అనుసంధానించబడి ఉంటుంది, అయితే దాని శరీరం బ్రాకెట్ 20కి కీలకంగా కనెక్ట్ చేయబడింది, ఇది వెనుక గోడపై అమర్చబడి ఉంటుంది. ప్రెస్ ఫ్రేమ్ 1, రాకర్ ఆర్మ్ 19 ద్వారా. బ్రాకెట్ 20 ప్రొజెక్షన్ 22తో అమర్చబడి ఉంటుంది మరియు రాకర్ 19 ప్రొజెక్షన్ 21తో అమర్చబడి ఉంటుంది, ఇది అప్పుడప్పుడు పరస్పర చర్యకు అవకాశం ఉంది.
యంత్రాంగం క్రింది విధంగా పనిచేస్తుంది. క్రాంక్ షాఫ్ట్ 3 యొక్క స్థిరమైన భ్రమణంతో, ఎలక్ట్రో-న్యూమాటిక్ ఆటోమేషన్ సిస్టమ్ నుండి కమాండ్పై, కంప్రెస్డ్ ఎయిర్ కంట్రోల్ న్యూమాటిక్ సిలిండర్ 17 యొక్క రాడ్ కేవిటీకి సరఫరా చేయబడుతుంది, దీని ఫలితంగా మరియు వాయు సిలిండర్ బాడీ యొక్క స్పష్టమైన కనెక్షన్కు ధన్యవాదాలు రాకర్ ఆర్మ్ 19, దాని రాడ్ 16 మరియు శరీరం యొక్క పరస్పర వ్యతిరేక కదలికలు సంభవిస్తాయి, ఇది రాకర్ ఆర్మ్ 19 సవ్యదిశలో తిప్పడానికి దారితీస్తుంది మరియు దాని ప్రోట్రూషన్ 21 బ్రాకెట్ 20 యొక్క ప్రోట్రూషన్ 22 మరియు వాయుకి చెందిన రాడ్ 16కి వ్యతిరేకంగా ఉంటుంది. సిలిండర్, స్ప్రింగ్ 18ను కుదించడం, బ్రాకెట్ 15పై పనిచేస్తుంది, దానితో ఇది కీలకంగా అనుసంధానించబడి ఉంటుంది మరియు తద్వారా కనెక్ట్ చేసే రాడ్ 4 యొక్క డ్రైవింగ్ 5 మరియు నడిచే 6 ఒక క్లోజ్డ్ పొజిషన్లో ఉంచబడిందని నిర్ధారిస్తుంది (మూర్తి 34లో చూపిన విధంగా). ఈ సందర్భంలో, కదలిక క్రాంక్ షాఫ్ట్ 3 నుండి స్లయిడర్ 2 కి క్లోజ్డ్ కనెక్టింగ్ రాడ్ ద్వారా బదిలీ చేయబడుతుంది 4. ఎలక్ట్రో-న్యూమాటిక్ ఆటోమేషన్ సిస్టమ్ నుండి కమాండ్పై కంట్రోల్ న్యూమాటిక్ సిలిండర్ 17 యొక్క రాడ్ కుహరంలోకి సంపీడన గాలి సరఫరా నిలిపివేయబడినప్పుడు, తిరిగే క్రాంక్ షాఫ్ట్ 3 మరియు ఈక్వలైజర్ 14 యొక్క శక్తితో, కనెక్ట్ చేసే రాడ్ మోచేతులు 5 మరియు 6 ఏర్పడతాయి మరియు వాటి స్థూపాకార ఉపరితలాలను సంపర్కం నుండి కీలు ఏర్పరుస్తాయి, ఇది యాక్సిల్స్ 10 యొక్క అసాధారణ సంస్థాపన కారణంగా దారితీస్తుంది. డిస్క్ 7 యొక్క అక్షం, వాటి మధ్య గ్యాప్ S ఏర్పడటానికి. అప్పుడు కనెక్ట్ చేసే రాడ్ 4 యొక్క మోకాలు 5 మరియు 6 వాటిని కనెక్ట్ చేసే ఇరుసులు 10కి సంబంధించి రాకింగ్ మోషన్ చేయడం ప్రారంభిస్తాయి మరియు క్రాంక్ షాఫ్ట్ 3 నిరంతరం తిరిగే బ్యాలెన్సర్ 14 యొక్క శక్తి ప్రభావంతో స్లైడర్ 2 ఉంటుంది. అత్యున్నత స్థానం. అదే సమయంలో, వసంత 18 యొక్క చర్యలో, నియంత్రణ వాయు సిలిండర్ 17 యొక్క శరీరం స్వేచ్ఛగా కదులుతుంది మరియు తగ్గిస్తుంది మరియు రాకర్ ఆర్మ్ 19 సవ్యదిశలో తిరుగుతుంది. న్యూమాటిక్ సిలిండర్ 17 యొక్క శరీరం దాని అత్యల్ప స్థానానికి చేరుకున్న తర్వాత, అది ఒక ఫ్లాట్ - సమాంతర కదలికను చేయడం ప్రారంభిస్తుంది, క్రాంక్ షాఫ్ట్ 3 నుండి కదలికను స్వీకరించేటప్పుడు బ్రాకెట్ 15 మరియు రాకర్ ఆర్మ్ 19 తో కీలు కనెక్షన్ యొక్క పాయింట్లకు సంబంధించి మారుతుంది. స్థిరమైన వేగంతో.రాడ్ కేవిటీ న్యూమాటిక్ సిలిండర్ 17లోకి సంపీడన వాయువు యొక్క తదుపరి సరఫరాతో, స్లయిడర్ 2 ఒక పని స్ట్రోక్ చేస్తుంది.
గేర్-లివర్ మెకానిజమ్స్.
గేర్లతో లివర్ మెకానిజమ్ల కలయిక రెండింటికీ అసాధారణమైన కొత్త లక్షణాలతో మెకానిజమ్లను సృష్టించడం సాధ్యం చేస్తుంది. చాలా తరచుగా, అవుట్పుట్ లింక్ యొక్క ఎత్తును పొందడానికి ఇటువంటి యంత్రాంగాలు ఉపయోగించబడతాయి, అయితే కొన్ని సందర్భాల్లో అవి అవుట్పుట్ లింక్ యొక్క కదలిక యొక్క వివిధ పథాలను పొందడం సాధ్యమవుతాయి, అలాగే దాని కదలిక యొక్క పరిమాణం మరియు వేగాన్ని మార్చవచ్చు.
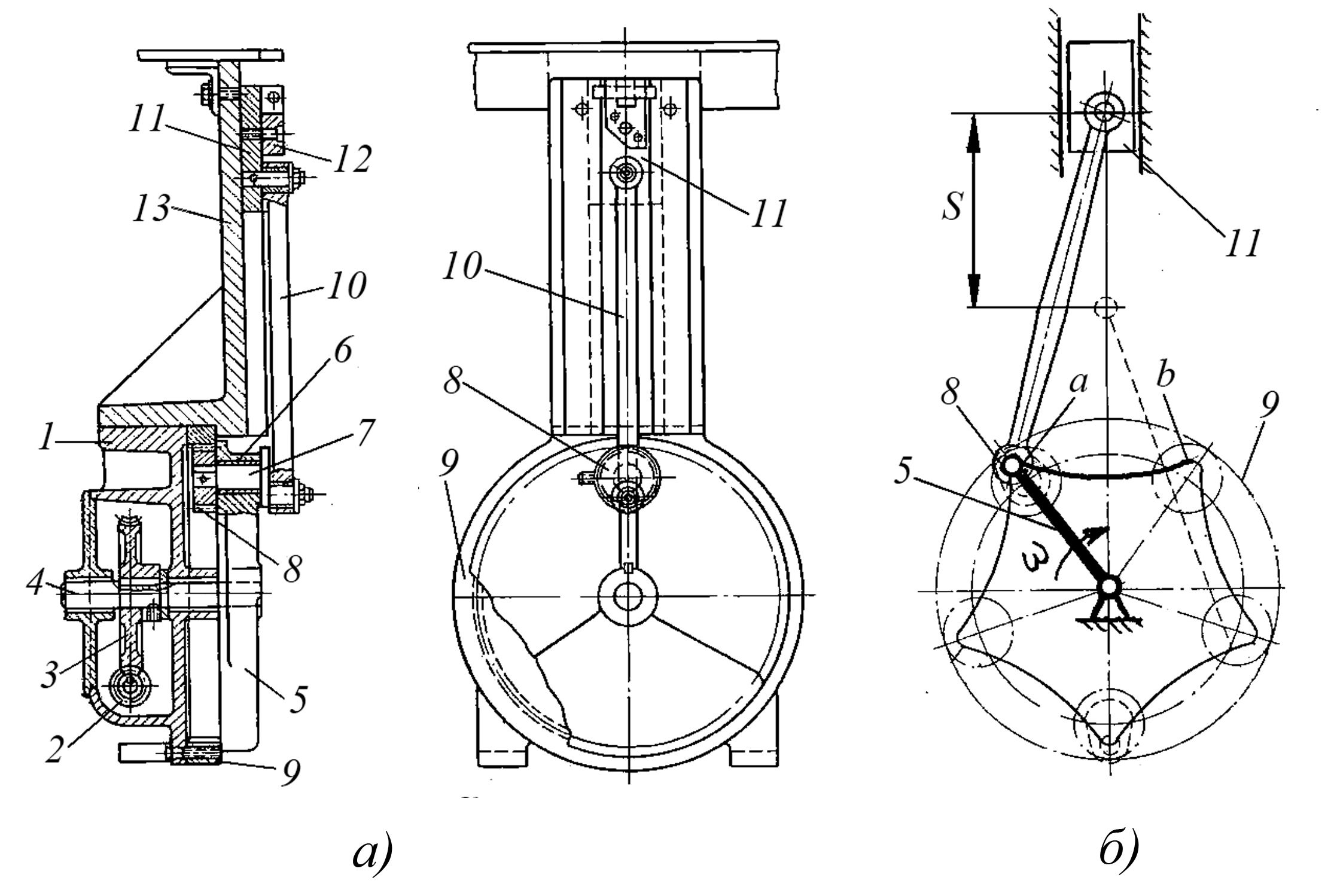
అత్తి 35 గేర్-లివర్ మెకానిజం రూపకల్పన, దీని అవుట్పుట్ లింక్ - విపరీతమైన ఫార్వర్డ్ పొజిషన్లోని స్లయిడర్ దానిని నిలబెట్టేలా చేస్తుంది
మూర్తి 35 గేర్-లివర్ మెకానిజం రూపకల్పనను చూపుతుంది, దీని యొక్క అవుట్పుట్ లింక్, స్లయిడర్, విపరీతమైన ఫార్వర్డ్ పొజిషన్లో డ్రైవ్ లింక్ యొక్క భ్రమణ యొక్క నిర్దిష్ట కోణంలో స్టాప్ చేస్తుంది - క్రాంక్. ఇది వార్మ్ గేర్ 2, 3 ఉన్న హౌసింగ్ 1ని కలిగి ఉంటుంది మరియు దాని నడిచే షాఫ్ట్ 4 లో క్రాంక్ 5 స్థిరంగా ఉంటుంది, ఇది ప్లానెటరీ గేర్ క్యారియర్, దీని రంధ్రంలో స్లైడింగ్లో అసాధారణ పిన్ 7 వ్యవస్థాపించబడింది. బేరింగ్ 6, దాని ఒక చివర ఉపగ్రహం 8 కఠినంగా స్థిరంగా ఉంటుంది , హౌసింగ్ 1లో అమర్చబడిన కిరీటం వీల్ 9తో నిమగ్నమై ఉంటుంది, మరియు మరొక చివర కనెక్ట్ చేసే రాడ్ 10కి కీలకంగా అనుసంధానించబడి ఉంటుంది, ఇది స్లయిడర్ 11 కదిలే పరస్పర కదలికను అందిస్తుంది ఫ్రేమ్ యొక్క గైడ్లు 12లో 13. ఈ సందర్భంలో, పిన్ 7 యొక్క విపరీత విలువ ఉపగ్రహం యొక్క ప్రధాన వృత్తం యొక్క వ్యాసార్థం కంటే చాలా తక్కువగా ఉంటుంది 8. పరికరం యొక్క ఆపరేషన్లో విరామం సమయంలో, అసాధారణ పిన్ 7 కదులుతుంది. క్రాంక్ 5 మరియు స్లయిడర్ 11తో కనెక్ట్ చేసే రాడ్ 10 యొక్క కనెక్షన్ యొక్క అక్షాల మధ్య దూరానికి వ్యాసార్థం దాదాపు సమానంగా ఉంటుంది, దీని ఫలితంగా అది స్లయిడర్కు కదలికను అందించకుండా రాకింగ్ కదలికను చేస్తుంది (అంజీర్ చూడండి . 35b). పరికరం యొక్క అటువంటి కైనమాటిక్స్తో, అసాధారణ పిన్ 7 యొక్క కదలిక పథం ఐదు ప్రోట్రూషన్లతో ఒక క్లోజ్డ్ కర్వ్, దీనిపై తీవ్ర స్థానంలో ఉన్న స్లయిడర్ 11 యొక్క పాజ్ విభాగం ద్వారా వ్యక్తీకరించబడుతుంది. a–b చార్టులో. కనెక్ట్ చేసే రాడ్ 10 యొక్క పొడవు పథ విభాగానికి దగ్గరగా ఉన్న ఆర్క్ యొక్క వ్యాసార్థానికి సమానం అనే వాస్తవం కారణంగా స్లయిడర్ 11 యొక్క పాజ్ ఏర్పడుతుంది. a-b క్రాంక్ 5.
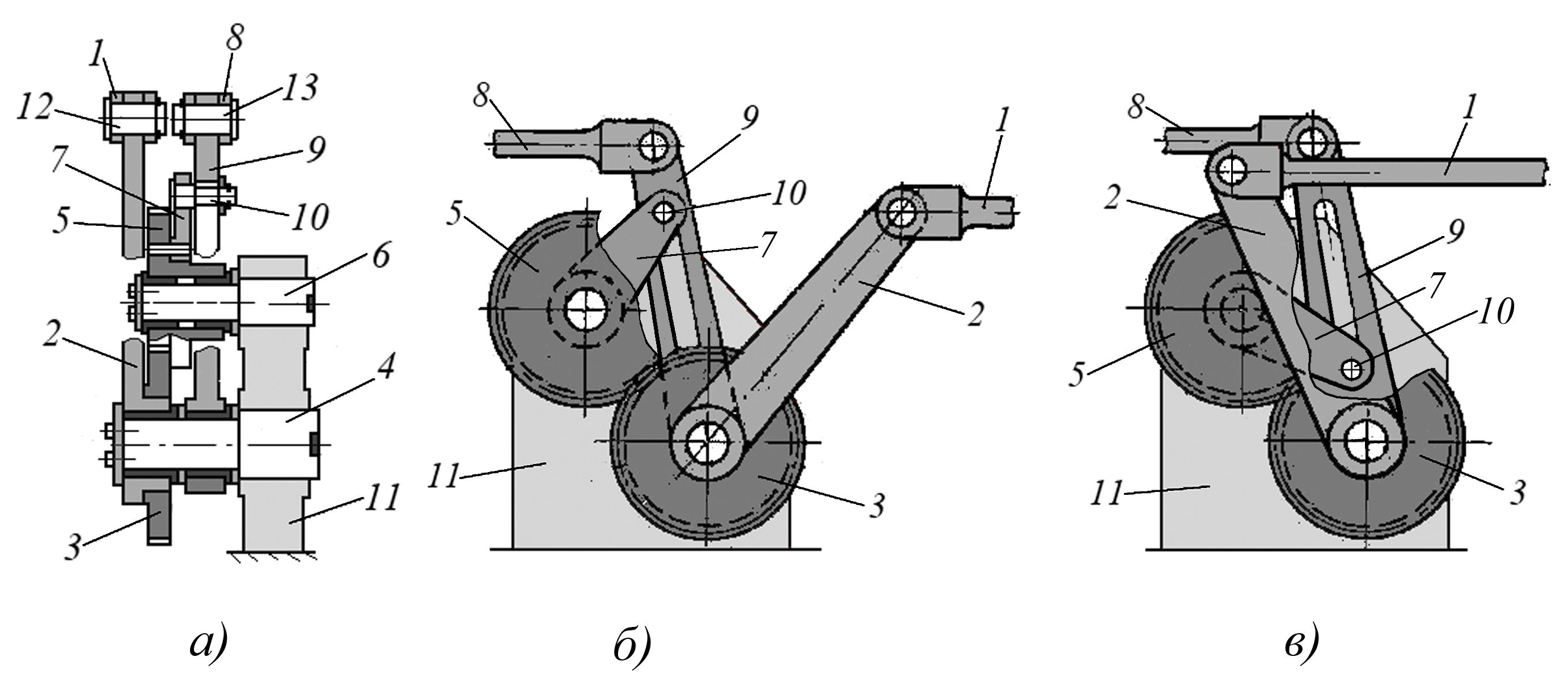
అత్తి 36 గేర్-లివర్ మెకానిజం యొక్క రూపకల్పన డ్రైవింగ్కు సంబంధించి నడిచే లింక్ యొక్క రెసిప్రొకేటింగ్ కదలికల సంఖ్యను రెండుసార్లు పొందడం సాధ్యం చేస్తుంది.
మూర్తి 36 గేర్-లివర్ మెకానిజం రూపకల్పనను చూపుతుంది, ఇది డ్రైవింగ్కు సంబంధించి నడిచే లింక్ యొక్క రెసిప్రొకేటింగ్ కదలికల సంఖ్యను రెండుసార్లు పొందడం సాధ్యం చేస్తుంది. ఈ డ్రైవ్ యొక్క ప్రముఖ మూలకం రాడ్ 1, ఇది లివర్ 2కి రాకింగ్ మోషన్ను అందిస్తుంది, ఇది గేర్ 3కి కనెక్ట్ చేయబడింది మరియు అక్షం 4పై ఈ చక్రంతో స్వేచ్ఛగా తిరుగుతుంది. గేర్ 3 చక్రం 5కి భ్రమణాన్ని అందిస్తుంది, అక్షం 6పై అమర్చిన లివర్ 7కి కనెక్ట్ చేయబడింది. పిన్ 10 లివర్ 7, స్లయిడ్ 9 యొక్క గాడిలో కదులుతుంది, రాడ్ 8కి కదలికను అందిస్తుంది. అక్షాలు 4 మరియు 6 ఫ్రేమ్పై అమర్చబడిన స్థిరమైన గృహంలో 11 మౌంట్ చేయబడతాయి. Fig. 36b,cలో, రాడ్ 1 తీవ్ర కుడి మరియు ఎడమ స్థానాల్లో చూపబడింది, ఇది దాని కదలిక చక్రం యొక్క ప్రారంభం మరియు మధ్య భాగానికి అనుగుణంగా ఉంటుంది. రెండు సందర్భాల్లోనూ స్లయిడ్ 9 ఒకే స్థానాన్ని ఆక్రమిస్తుంది, ఎందుకంటే ఇది పూర్తి చక్రాన్ని పూర్తి చేసి దాని అసలు స్థానానికి తిరిగి వస్తుంది. లివర్ 2 ఎడమవైపు అంజీర్ 36aలో చూపిన స్థానం నుండి రాడ్ 1 ద్వారా తరలించబడుతుంది, దీని ఫలితంగా గేర్ 3 విప్లవంలో కొంత భాగాన్ని చేస్తుంది. చక్రం 3 తో మెష్లో ఉన్న గేర్ 5, వ్యతిరేక దిశలో అదే భ్రమణాన్ని చేస్తుంది. లివర్ 7, చక్రం 5కి అనుసంధానించబడి, దానితో తిరుగుతుంది మరియు 10 వేలు లింక్ 9 యొక్క గాడితో పాటు క్రిందికి కదులుతుంది. వేలు 10 అక్షం 6 యొక్క కేంద్రాన్ని దాటడానికి ముందు, లింక్ కుడి వైపుకు మారుతుంది మరియు దాని తీవ్ర స్థానానికి చేరుకుంటుంది (Fig. 36c). రాడ్ 1 యొక్క మరింత కదలికతో, వేలు 10 అక్షం 6 మధ్యలో పడిపోతుంది మరియు స్లయిడ్ 9 ను వ్యతిరేక దిశలో, అంటే ఎడమ వైపుకు కదులుతుంది. రాడ్ 1 తీవ్ర ఎడమ స్థానానికి చేరుకున్న సమయంలో, స్లయిడ్ 9 కూడా దాని తీవ్ర ఎడమ స్థానానికి చేరుకుంటుంది, రాడ్ 1 మాత్రమే ముందుకు కదిలేటప్పుడు డబుల్ మూవ్ చేస్తుంది. రాడ్ 1 రివర్స్ స్ట్రోక్ చేసే సమయంలో, లింక్ 9 మరొక డబుల్ స్ట్రోక్ చేస్తుంది.
అత్తి 37 నడిచే షాఫ్ట్ యొక్క ఆవర్తన భ్రమణ కోణాన్ని స్వయంచాలకంగా మార్చడానికి మిమ్మల్ని అనుమతించే గేర్-లివర్ మెకానిజం రూపకల్పన.
ఫిగర్ 37 గేర్-లివర్ మెకానిజం రూపకల్పనను చూపుతుంది, ఇది నడిచే షాఫ్ట్ యొక్క ఆవర్తన భ్రమణ కోణాన్ని స్వయంచాలకంగా మార్చడానికి మిమ్మల్ని అనుమతిస్తుంది. ఇది నడిచే షాఫ్ట్ 1ని కలిగి ఉంటుంది, దానిపై గేర్ 2 మరియు రాట్చెట్ వీల్ 3 కఠినంగా స్థిరపరచబడి ఉంటాయి, అలాగే ఒక రాకర్ ఆర్మ్ 4 షాఫ్ట్ 1పై భ్రమణ అవకాశంతో అమర్చబడి ఉంటుంది, అయితే గేర్ 2 గేర్తో నిరంతరం నిమగ్నమై ఉంటుంది. 5, ఇది రాకర్ ఆర్మ్ 4పై అక్షం 12 ద్వారా కీలకంగా మౌంట్ చేయబడింది మరియు క్రాంక్ 6ని కలిగి ఉంటుంది, ఇది అక్షం 13 ద్వారా రాడ్ 7కి కనెక్ట్ చేయబడింది, ఇది అక్షం 10 ద్వారా డ్రైవ్ రాడ్ 8కి కీలకంగా కనెక్ట్ చేయబడింది. అదనంగా, రాట్చెట్ వీల్ 3తో సంబంధం ఉన్న రాకర్ ఆర్మ్ 4లో స్ప్రింగ్-లోడెడ్ పాల్ 11 ఇన్స్టాల్ చేయబడింది మరియు స్లయిడర్ 9లో ఒక అక్షం 10 ఇన్స్టాల్ చేయబడింది, ఇది రాకర్ ఆర్మ్ 4 యొక్క రేఖాంశ గాడి వెంట కదలగలదు. అంజీర్ 37aలో, స్లయిడర్ 9 దాని అత్యల్ప స్థానంలో చూపబడింది
యంత్రాంగం క్రింది విధంగా పనిచేస్తుంది. రాడ్ 8, రెసిప్రొకేటింగ్ మోషన్ను ప్రదర్శిస్తూ, రాకర్ ఆర్మ్ 4కి రాకింగ్ మోషన్ను అందజేస్తుంది. రాడ్ 8 ముందుకు కదులుతున్నప్పుడు, పాల్ 11 రాట్చెట్ వీల్ 3తో ఎంగేజ్ అవుతుంది, దీని కారణంగా నడిచే షాఫ్ట్ 1, గేర్ వీల్ 2తో కలిసి ఉంటుంది. , రాకర్ ఆర్మ్ 4తో కలిసి రాకింగ్ మోషన్ చేస్తుంది. రాడ్ రివర్స్ 8లో కదులుతున్నప్పుడు, రాట్చెట్ వీల్ మరియు నడిచే షాఫ్ట్ 1 యొక్క దంతాల వెంట పావ్ల్ 11 స్లైడ్లు, గేర్ వీల్ 2తో కలిసి స్థిరంగా ఉంటాయి. రాకర్ ఆర్మ్ 4 యొక్క రివర్స్ కదలిక సమయంలో, గేర్ 5, ఈ సమయంలో స్టేషనరీ గేర్ వీల్ 2 వెంట తిరుగుతూ, అక్షం 12పై తిరుగుతుంది మరియు క్రాంక్ 6ని మారుస్తుంది, ఇది రాడ్ 7కి హింగ్గా కనెక్ట్ చేయబడి, ఫ్లాట్ను ఇస్తుంది, దానికి సమాంతర కదలిక, మరియు రెండోది అదే సమయంలో రాకర్ ఆర్మ్ 4 యొక్క గాడిలో స్లయిడర్ 9ని కదిలిస్తుంది, దీని ఫలితంగా అక్షం 10 నుండి షాఫ్ట్ 1 వరకు దూరం పెరుగుతుంది. ఈ సందర్భంలో గేర్ 2 మరియు గేర్ 5 మధ్య గేర్ నిష్పత్తి రెండింటికి సమానంగా ఎంపిక చేయబడినందున, క్రాంక్ 6తో గేర్ 5 180 డిగ్రీల కోణంలో తిరుగుతుంది మరియు స్లయిడర్ 9 రాకర్ 4 యొక్క గాడిలో ఎగువ స్థానాన్ని ఆక్రమిస్తుంది (Fig. 37b చూడండి ) అందువల్ల, రాడ్ 8 యొక్క తదుపరి ఫార్వర్డ్ స్ట్రోక్ సమయంలో, రాకర్ ఆర్మ్ 4 యొక్క భ్రమణ కోణం మరియు తదనుగుణంగా, స్వింగ్ వ్యాసార్థంలో పెరుగుదల కారణంగా నడిచే షాఫ్ట్ 1 తక్కువగా ఉంటుంది. రాడ్ 8 రివర్స్లో కదులుతున్నప్పుడు మరియు రాకర్ ఆర్మ్ 4 మారినప్పుడు, గేర్ 5, స్థిర గేర్ 2 వెంట తిరుగుతూ, మళ్లీ 180 డిగ్రీల కోణంలో మారుతుంది, స్లయిడర్ 9 దాని అసలు దిగువ స్థానాన్ని అంజీర్ 37aలో చూపిన విధంగా తీసుకుంటుంది. , దీని తర్వాత మెకానిజం యొక్క ఆపరేషన్ చక్రం పునరావృతమవుతుంది.
 అత్తి 38 లీనియర్ కదలిక కోసం గేర్-లివర్ మెకానిజం రూపకల్పన.
అత్తి 38 లీనియర్ కదలిక కోసం గేర్-లివర్ మెకానిజం రూపకల్పన.
యంత్రాంగాల లెక్కలు (కైనమాటిక్, ఎనర్జీ, పవర్, బలం), అలాగే వాటి ప్రధాన నిర్మాణ అంశాలు (విపరీత మరియు క్రాంక్ షాఫ్ట్లు, కనెక్ట్ చేసే రాడ్లు, స్లైడర్లు, లివర్లు, కీలు కీళ్ళు) పనిలో ఇవ్వబడ్డాయి.
గత 20-25 సంవత్సరాలలో మెకానికల్ ఇంజనీరింగ్లో మార్పులు ఉన్నప్పటికీ, సాంకేతిక పరికరాల రూపకల్పనతో సహా, ప్రధానంగా డ్రైవ్ రకం మరియు దాని నియంత్రణ వ్యవస్థకు సంబంధించినవి, లివర్ మెకానిజమ్లు వాటి ప్రత్యేక ప్రయోజనాల కారణంగా విస్తృతంగా ఉపయోగించబడుతున్నాయి. ఈ ప్రయోజనాలు లివర్ మెకానిజమ్లు అధిక ఆపరేటింగ్ వేగంతో, యాక్చుయేటర్ యొక్క అవుట్పుట్ లింక్ యొక్క కదలిక యొక్క ఇచ్చిన పథాన్ని పొందటానికి అనుమతిస్తాయి, అలాగే పరికరాల ఆపరేషన్ చక్రం యొక్క నిర్దిష్ట వ్యవధిలో పల్సెడ్ సాంకేతిక లోడ్ల సమక్షంలో ఉంటాయి. , అవసరమైన శక్తిని తగ్గించడానికి క్రాంక్ మెకానిజం యొక్క లక్షణాలను ప్రత్యేకంగా ఉపయోగించడం. అదనంగా, లివర్ మెకానిజమ్స్ సాధారణ నిర్మాణ మూలకాలను ఉపయోగించి, అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ల సంఖ్యను పెంచడానికి, అవుట్పుట్ లింక్ యొక్క స్ట్రోక్ యొక్క పరిమాణాన్ని మార్చడానికి, డ్రైవ్ యొక్క కదలికను పెంచకుండా, మరియు అనేక పరిష్కారాలను కూడా సాధ్యం చేస్తుంది. ఇతర సమస్యలు. అదే సమయంలో, హైడ్రాలిక్ లేదా ప్రోగ్రామబుల్ ఎలక్ట్రోమెకానికల్ డ్రైవ్ ఈ విషయంలో లివర్ మెకానిజమ్లతో పోటీపడదు, ఇది లివర్ మెకానిజమ్స్ కోసం చాలా విస్తృతమైన అప్లికేషన్లను నిర్ణయిస్తుంది.
సాహిత్యం.
1. Ignatiev N.P. డిజైన్ అజోవ్ 2011 యొక్క ఫండమెంటల్స్.
2. Ignatiev N.P. మెకానిజమ్స్ డిజైన్ అజోవ్ 2015.
రచయిత యొక్క పని యొక్క సంబంధిత విభాగాల నుండి సమాచారం ఆధారంగా వ్యాసం వ్రాయబడింది "డిజైన్ ఫండమెంటల్స్" 2011లో ప్రచురించబడింది మరియు రచయిత యొక్క పని "మెకానిజం డిజైన్", 2015లో ప్రచురించబడింది.
సూచన మరియు పద్దతి మాన్యువల్లో "మెకానిజం డిజైన్"లివర్ మెకానిజమ్స్ రూపకల్పన యొక్క ఉదాహరణలతో పాటు, ఇది కలిగి ఉంటుంది:
- కామ్ మెకానిజమ్స్, అడపాదడపా మెకానిజమ్స్ మరియు కంబైన్డ్ మెకానిజమ్స్ ఉపయోగం కోసం డిజైన్ ఉదాహరణలు మరియు సిఫార్సులు,
- పై మెకానిజమ్ల యొక్క ప్రధాన రకాల భాగాల ఉపయోగం కోసం డిజైన్ మరియు సిఫార్సుల ఉదాహరణలు: క్రాంక్ షాఫ్ట్లు, కనెక్ట్ చేసే రాడ్లు, స్లయిడర్లు, మీటలు మరియు రాకర్ చేతులు, కెమెరాలు మరియు వాటి కీలు కీళ్ళు,
- మెకానిజం డ్రైవ్ రకాన్ని ఎంచుకోవడానికి సిఫార్సులు మరియు దాని అమలు ఉదాహరణలు,
- యంత్రాంగాల లెక్కలు,
- కామ్ మెషీన్ యొక్క ఆపరేషన్ యొక్క సైక్లోగ్రామ్ను నిర్మించడానికి ఒక ఉదాహరణ,
- మెకానిజమ్స్ రూపకల్పనకు పద్దతి,
- యంత్రాంగాలు మరియు వాటి విలక్షణమైన భాగాలకు ఖచ్చితత్వ అవసరాలను కేటాయించడానికి సిఫార్సులు,
- సంక్లిష్టమైన అసలు యంత్రాంగాన్ని రూపొందించడానికి ఒక ఉదాహరణ
కథనం యొక్క పూర్తి సంస్కరణను కొనుగోలు చేయడానికి, దానిని మీ కార్ట్కు జోడించండి,
వ్యాసం యొక్క పూర్తి వెర్షన్ ధర 80 రూబిళ్లు.
ఆధునిక మెకానికల్ ఇంజనీరింగ్లో తక్కువ కినిమాటిక్ జతలతో లివర్ మెకానిజమ్లు విస్తృతంగా వ్యాపించాయి. అటువంటి యంత్రాంగాల యొక్క ప్రయోజనాలు: అధిక ఉత్పాదకత, కైనమాటిక్ కనెక్షన్లలో రోలింగ్ బేరింగ్లను ఉపయోగించగల అవకాశం, సంప్రదింపు ఉపరితలాలు, విశ్వసనీయత మరియు ఆపరేషన్లో మన్నిక యొక్క తక్కువ ధరలతో పెద్ద శక్తులను ప్రసారం చేయగల సామర్థ్యం. ఈ మెకానిజమ్లకు కామ్ మెకానిజమ్ల వలె కాకుండా, కినిమాటిక్ జతల స్థిరంగా మూసివేయడాన్ని నిర్ధారించే పరికరాలు అవసరం లేదు.
సాంకేతిక ప్రక్రియ యొక్క అవసరాలను తీర్చడానికి పరిస్థితుల నుండి యంత్రాంగాలు సృష్టించబడతాయి. మెకానిజం డిజైన్ ఒక క్లిష్టమైన పని, దీని పరిష్కారం రెండు దశలుగా విభజించబడింది. మొదటి దశమెకానిజమ్ల సంశ్లేషణ అనేది అవుట్పుట్ లింక్ యొక్క చలనం యొక్క అవసరమైన రకం మరియు చట్టాన్ని మరియు మెకానిజమ్ల కార్యాచరణకు సాధారణ పరిస్థితులను అందించే కినిమాటిక్ రేఖాచిత్రాన్ని ఎంచుకోవడంలో ఉంటుంది. లో రెండవ దశయంత్రాంగం యొక్క బలం మరియు విశ్వసనీయతను నిర్ధారించడానికి లింక్లు మరియు కినిమాటిక్ జతల నిర్మాణ రూపాలు అభివృద్ధి చేయబడుతున్నాయి. మా కోర్సు మాత్రమే వర్తిస్తుంది మొదటి అడుగుసంశ్లేషణ.
మెకానిజం డిజైన్ సాధారణంగా ఇచ్చిన నిర్దిష్ట పరిస్థితులకు సంబంధించి అనుభవం ఆధారంగా ఎంపిక చేయబడుతుంది. అప్పుడు నిర్ణయించండి సంశ్లేషణ పారామితులు, అనగా లింక్ల పొడవు మరియు పాయింట్ల కోఆర్డినేట్లు అవసరమైన పథాలు మొదలైనవి అందించడం, అలాగే అదనపు సంశ్లేషణ పరిస్థితులు.
అదనపు సంశ్లేషణ పరిస్థితులు ఉన్నాయి క్రాంక్ ఉనికి కోసం పరిస్థితి, మరియు శక్తి బదిలీ పరిస్థితి.
బలవంతంగా బదిలీ పరిస్థితి
యంత్రాలలో శక్తి ప్రసారం యొక్క నాణ్యత సాధారణంగా పీడన కోణం λ ద్వారా వర్గీకరించబడుతుంది, లింక్లు మరియు జడత్వ శక్తుల గురుత్వాకర్షణ శక్తులను పరిగణనలోకి తీసుకోకుండా నిర్ణయించబడుతుంది.
ఒత్తిడి కోణం λ ఉంది ప్రక్కనే ఉన్న కదిలే లింక్ వైపు నుండి నడిచే లింక్పై పనిచేసే శక్తి యొక్క వెక్టర్ మరియు ఈ శక్తి యొక్క అప్లికేషన్ పాయింట్ యొక్క సంపూర్ణ వేగం యొక్క వెక్టర్ మధ్య తీవ్రమైన కోణం.
మోషన్ ట్రాన్స్మిషన్ కోణం γ ఒత్తిడి కోణాన్ని 90° వరకు పూర్తి చేస్తుంది:
γ = 90° - λ .
మెట్రిక్ సంశ్లేషణ దశలో, పీడనం యొక్క గరిష్టంగా అనుమతించదగిన కోణాలు [λ max ] మరియు చలన ప్రసారం [γ min ] పరిమితం చేయబడతాయి, నియమం ప్రకారం, వాటిని తీసుకోవడం:
స్లైడింగ్ నడిచే లింక్ కోసం [λ గరిష్టం ] ≤ 30° మరియు [γ నిమి ] ≥ 60°, మరియు
[λ గరిష్టం ] ≤ 40°...45° మరియు [γ నిమి ] ≥ 50°...45° – తిరిగే నడిచే లింక్ కోసం.
చోదక శక్తి యొక్క క్షణాల ప్రభావంతో సమతౌల్యంలో ఉన్న నాలుగు-బార్ ఉచ్చారణ అనుసంధానంలో బలగాల బదిలీ కోసం పరిస్థితిని పరిశీలిద్దాం. ఎం D మరియు ప్రతిఘటన యొక్క క్షణం ఎంసి (Fig. 3.1). పీడన కోణం λ ఉపయోగకరమైన నిరోధక శక్తి మధ్య సంబంధాన్ని వర్ణిస్తుంది ఎఫ్ 23 cos λ ప్రతిఘటన యొక్క క్షణాన్ని అధిగమించడం ఎంతో, మరియు శక్తి ఎఫ్ 23, సమానం
ఎఫ్ 23 = ఎంతో /( ఎల్ సూర్యుడు∙కాస్ λ).
Fig.3.1. ఒత్తిడి కోణం λ నాలుగు-బార్ ఉచ్చరించబడిన లింక్లో
ఒత్తిడి కోణం పెరిగేకొద్దీ, మరింత బలాన్ని వర్తింపజేయాలి ఎఫ్ప్రతిఘటన యొక్క అదే క్షణాన్ని అధిగమించడానికి 23. ఇది కినిమాటిక్ జతలలో ప్రతిచర్యల పెరుగుదలకు మరియు యంత్రాంగం యొక్క సామర్థ్యంలో తగ్గుదలకు దారితీస్తుంది.
యంత్రాంగం కదులుతున్నప్పుడు, ఒత్తిడి కోణం మారుతుంది. నాలుగు-బార్ కీలులోని ఈ కోణం క్రాంక్ ఉన్న స్థానాల్లో తీవ్ర విలువలను చేరుకుంటుంది ఓ ఏస్టాండ్తో ఒకే సరళ రేఖలో ఉంది OS(Fig. 3.2).
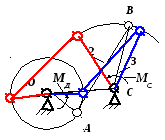
Fig.3.2. పీడన కోణాలు చేరుకునే యంత్రాంగం యొక్క స్థానాలు
తీవ్రమైన విలువలు
క్రాంక్-స్లైడర్ మెకానిజంలో, పీడన కోణం అంజీర్లో చూపిన స్థానాల్లో తీవ్ర విలువలను తీసుకుంటుంది. 3.3 ఉన్నప్పుడు క్రాంక్ ఓ ఏస్లయిడర్ యొక్క పథానికి లంబంగా IN.

అన్నం. 3.3 పీడన కోణాల మెకానిజం యొక్క స్థానాలు
విపరీతమైన విలువలను కలిగి ఉంటాయి.
క్రింద మేము కోర్సు ప్రాజెక్ట్లలో మెకానిజమ్స్ యొక్క కైనమాటిక్ సంశ్లేషణ యొక్క అత్యంత సాధారణ సమస్యలను పరిశీలిస్తాము.
సగటు వేగం మరియు రాకర్ ఆర్మ్ యొక్క రెండు తీవ్ర స్థానాల్లో మార్పు యొక్క గుణకం ఆధారంగా నాలుగు-బార్ ఉచ్చారణ అనుసంధానం యొక్క సంశ్లేషణ
గుణకం కెనడిచే లింక్ యొక్క సగటు వేగంలో మార్పు సమానంగా ఉంటుంది కె = వి సి 2 – 1 / వి సి 1 – 2 ,
ఎక్కడ వి సి 1 – 2 − పాయింట్ యొక్క సగటు సరళ వేగం తో(Fig. 3.4) వర్కింగ్ స్ట్రోక్ సమయంలో, వి సి 2 – 1 − అదే రివర్స్ స్ట్రోక్.
ఒప్పుకుందాం కె> 1, మెకానిజమ్లను రూపొందించేటప్పుడు, నియమం ప్రకారం, ప్రారంభ స్థానానికి తిరిగి వచ్చే సమయం వర్కింగ్ స్ట్రోక్ సమయం కంటే తక్కువగా ఉంటుంది, కాబట్టి కె > 1.
అని నిరూపించడం కష్టం కాదు కె= (180° + θ) /(180° – θ).
ఎక్కడ θ = 180° ( కె −1) /(కె +1),
ఎక్కడ q − కనెక్ట్ రాడ్ స్థానాల మధ్య కోణం బి.సి.పని స్ట్రోక్ ప్రారంభంలో మరియు ముగింపులో.
కింది సంజ్ఞామానాన్ని పరిచయం చేద్దాం:
ఎల్ 1 - క్రాంక్ పొడవు AB,(Fig. 3.4 చూడండి); ఎల్ 2 - కనెక్ట్ రాడ్ పొడవు సూర్యుడు;
ఎల్ 3 - రాకర్ పొడవు CD; ఎల్ 4 - మద్దతు మధ్య దూరం (స్టాండ్ పొడవు ఎడి).

అన్నం. 3.4 పేర్కొన్న కోణాల ψ విలువలకు అనుగుణంగా స్థానాల్లో మెకానిజం యొక్క రేఖాచిత్రం
కోణాలు ψ 1 మరియు ψ 2, అలాగే గుణకం ఇవ్వబడింది కె, రాకర్ ఆర్మ్ యొక్క రెండు తీవ్ర స్థానాలను వర్ణిద్దాం CD(Fig. 3.5).
పాయింట్లు తో 1 మరియు తో 2ని సరళ రేఖతో కనెక్ట్ చేద్దాం. కనెక్ట్ చేసే రాడ్ యొక్క తీవ్ర స్థానాల మధ్య కోణం qని గణిద్దాం సూర్యుడు. పాయింట్ వద్ద తో 2 కోణాన్ని γ = 90° నిర్మించండి −
θ, మరియు పాయింట్ నుండి తో 1 లైన్కు లంబంగా తగ్గించండి తో 1 తో 2 అది పాయింట్ నుండి గీసిన గీతతో కలుస్తుంది తో 2 మరియు కోణాన్ని ఏర్పరుస్తుంది γ. ఈ పంక్తుల ఖండన బిందువును సూచిస్తాము గురించి. సహజంగానే, లంబ త్రిభుజంలో ఓతో 1 తో 2 మూలలో తో 1 OS 2 = θ. మూడు పాయింట్ల ద్వారా O, తో 1 మరియు తో 2 మేము ఒక వృత్తాన్ని వివరిస్తాము. పాయింట్ వద్ద శీర్షంతో లిఖించబడిన కోణం గురించిఒక ఆర్క్ మీద ఉంటుంది  మరియు θ కోణానికి సమానం, అలాగే ఒకే ఆర్క్ ఆధారంగా అన్ని లిఖించబడిన కోణాలు. పాయింట్ వద్ద మధ్యలో ఉన్న సర్కిల్ను ఎంచుకుందాం గురించిఏకపక్ష పాయింట్ ఎమరియు పాయింట్లతో నేరుగా విభాగాలతో దాన్ని కనెక్ట్ చేయండి తో 1 మరియు తో 2. ఫలితంగా, పాయింట్ వద్ద క్రాంక్ మద్దతు ఉంచడం ఎ, మేము తీవ్ర స్థానాల్లో నాలుగు-బార్ మెకానిజం యొక్క రేఖాచిత్రాన్ని పొందుతాము (Fig. 3.5 చూడండి).
మరియు θ కోణానికి సమానం, అలాగే ఒకే ఆర్క్ ఆధారంగా అన్ని లిఖించబడిన కోణాలు. పాయింట్ వద్ద మధ్యలో ఉన్న సర్కిల్ను ఎంచుకుందాం గురించిఏకపక్ష పాయింట్ ఎమరియు పాయింట్లతో నేరుగా విభాగాలతో దాన్ని కనెక్ట్ చేయండి తో 1 మరియు తో 2. ఫలితంగా, పాయింట్ వద్ద క్రాంక్ మద్దతు ఉంచడం ఎ, మేము తీవ్ర స్థానాల్లో నాలుగు-బార్ మెకానిజం యొక్క రేఖాచిత్రాన్ని పొందుతాము (Fig. 3.5 చూడండి).

అన్నం. 3.5 గుణకం k ప్రకారం నాలుగు-బార్ కీలు యొక్క సంశ్లేషణ
సగటు వేగం మరియు రాకర్ యొక్క రెండు తీవ్ర స్థానాల్లో మార్పులు
బొమ్మ నుండి ఇది క్రింది విధంగా ఉంది AC 1 = IN 1 తో 1 −AB 1 = ఎల్ 2 − ఎల్ 1 ; AC 2 = IN 2 తో 2 −AB 2 = ఎల్ 2 + ఎల్ 1 .
ఎక్కడ ఎల్ 1 = 0,5 (AC 2 −AC 1) μ ఎల్ / 2; ఎల్ 2 = AC 2 − ఎల్ 1 .
స్టాండ్ పొడవు ఎడి = ఎల్ 4 పాయింట్ యొక్క స్థానం ద్వారా నిర్ణయించబడుతుంది ఎ.
పాయింట్ యొక్క స్థానం నుండి ఎఏకపక్షంగా ఎంపిక చేయబడింది, సమస్యకు బహుళ పరిష్కారం ఉంది. ఇది అదనపు షరతులను పరిచయం చేయడానికి మిమ్మల్ని అనుమతిస్తుంది, ఉదాహరణకు, శక్తి బదిలీ యొక్క పరిస్థితి, కోఆర్డినేట్ అక్షానికి సంబంధించి మద్దతుల స్థానం యొక్క విపరీతత యొక్క ఉనికి లేదా లేకపోవడం.
ప్రకారం రాకర్ మెకానిజం యొక్క సంశ్లేషణ గుణకంకె మార్పులు
సన్నివేశాల సగటు వేగం
ఇవ్వబడింది: గుణకం కెవేగంలో మార్పులు మరియు పాయింట్ యొక్క రెండు తీవ్ర స్థానాలు INతెరవెనుక సూర్యుడు.
రెండు తీవ్ర స్థానాల్లో (Fig. 3.6) రాకర్ మెకానిజంను పరిశీలిద్దాం.

అన్నం. 3.6 రాకర్ మెకానిజం యొక్క సంశ్లేషణ
క్రాంక్ స్థానం మధ్య కోణం ఓ ఏ 2 మరియు స్థానంలో క్రాంక్ యొక్క కొనసాగింపు ఓ ఏ 1 θ = 180°కి సమానం ( కె −1) /(కె+1). కోణాలు IN 1 సి బి 2 మరియు q ఒకదానికొకటి సమానంగా ఉంటుంది, పరస్పరం లంబంగా ఉండే భుజాలతో కోణాల వలె.
సరళ రేఖలో IN 1 IN 2 శీర్షం వద్ద కోణంతో సమద్విబాహు త్రిభుజాన్ని నిర్మించండి తో, కోణానికి సమానం q. ఏకపక్ష బిందువు వద్ద కోణం qని సగానికి విభజించే సరళ రేఖపై, ఒక బిందువును ఎంచుకోండి గురించి, దీని చుట్టూ క్రాంక్ తిరుగుతుంది ఓ ఏ. పాయింట్ నుండి డ్రాప్పింగ్ గురించిరేఖకు లంబంగా IN 1 తో(లేదా IN 2 తో), క్రాంక్ యొక్క పొడవును కనుగొనండి ఓ ఏ. ఫలితంగా రాకర్ మెకానిజం పేర్కొన్న షరతులను సంతృప్తిపరుస్తుంది. ఇచ్చిన పరిస్థితుల ప్రకారం రాకర్ మెకానిజం నిర్మాణం క్రింది విధంగా జరుగుతుంది. పాయింట్లు IN 1 మరియు IN 2, ఇవ్వబడిన స్థానం, మేము సరళ రేఖతో కనెక్ట్ చేస్తాము.
క్రాంక్-స్లైడర్ మెకానిజం యొక్క సంశ్లేషణ
కింది సమావేశాలను అంగీకరిస్తాం (Fig. 3.7):
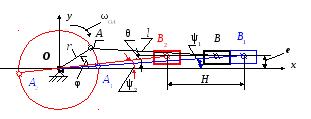
అన్నం. 3.7 క్రాంక్-స్లైడర్ మెకానిజం యొక్క రేఖాచిత్రం
ఆర్- క్రాంక్ పొడవు ఓ ఏ;ఎన్- స్లయిడర్ యొక్క స్ట్రోక్; ఎల్- కనెక్ట్ రాడ్ పొడవు AB;
ఇ- విచక్షణ లేని, అనగా. పాయింట్ పథం ఆఫ్సెట్ INఅక్షానికి సంబంధించి స్లయిడర్ ఓహ్ ;
ఎల్ = ఎల్/ ఆర్- కనెక్ట్ రాడ్ యొక్క సాపేక్ష పొడవు;
ν = ఇ/ఆర్- సాపేక్ష విచక్షణ;
h = హెచ్/ ఆర్- స్లయిడర్ యొక్క సంబంధిత స్ట్రోక్ ;
λ గరిష్ట - గరిష్ట పీడన కోణం (Fig. 3.3 చూడండి);
కె − స్లయిడర్ యొక్క సగటు వేగంలో మార్పు యొక్క గుణకం (§ 3.1 చూడండి)
ψ 1 మరియు ψ 2 - క్రాంక్ ద్వారా ఏర్పడిన తీవ్రమైన కోణాలు ఓ ఏదిశానిర్దేశంతో ఓహ్స్లయిడర్ యొక్క తీవ్ర స్థానాల్లో: φ 1 =  IN 1
ఓహ్, φ 2 = IN 2
ఓహ్
;
IN 1
ఓహ్, φ 2 = IN 2
ఓహ్
;
θ = ψ 2 - ψ 1 - స్లయిడ్ యొక్క తీవ్ర స్థానాల్లో కనెక్ట్ చేసే రాడ్ల మధ్య తీవ్రమైన కోణం.
టాస్క్ 1. ఇచ్చిన: కాదు, ఎల్ = ఎల్/ ఆర్.
కనుగొనండి: ఆర్; ఎల్; ׀λ గరిష్టం.
క్రాంక్ పొడవు ఓ ఏ: ఆర్ = హెచ్ / h. కనెక్ట్ రాడ్ పొడవు AB: ఎల్ = ఎల్ ఆర్.
పీడన కోణం యొక్క అతిపెద్ద విలువ ׀ λ max ׀ = ఆర్క్ సిన్ [(1 + ν) / ఎల్] .
టాస్క్ 2. ఇచ్చిన: N,కె, ఎల్= ఎల్/ ఆర్.
కనుగొనండి: r; l; ఇ; λ గరిష్టంగా.
స్లయిడర్ యొక్క తీవ్ర స్థానాల్లో కనెక్ట్ చేసే రాడ్ల మధ్య తీవ్రమైన కోణం
θ = 180 0 ∙( కె–1)/(కె+1).
మేము వ్యక్తీకరణ నుండి స్లయిడర్ యొక్క సంబంధిత స్ట్రోక్ను కనుగొంటాము
h = {2∙} 0,5 .
మేము వ్యక్తీకరణ నుండి సాపేక్ష వైరుధ్యాన్ని కనుగొంటాము
ν = [( h –2)∙(ఎల్ 2 –1)] 0,5 .
క్రాంక్ పొడవు ఆర్ = హెచ్/ h; కనెక్ట్ రాడ్ పొడవు ఎల్ = ఎల్ ఆర్; నిర్లక్ష్యపూరితమైన ఇ =ν ఆర్.
పీడన కోణం యొక్క అతిపెద్ద విలువ λ max = ఆర్క్ సిన్ [(1 + ν) / ఎల్].