DAN KERANGKA RUJUKAN INTERIAL .
1. Seperti yang telah dinyatakan, peranan penting dalam dinamik dimainkan oleh pilihan sistem rujukan.
Fenomena fizikal berlaku, secara amnya, berbeza dalam sistem yang berbeza kira detik. Oleh itu, adalah wajar untuk memilih sistem di mana fenomena serupa, contohnya mekanikal, berlaku yang sama dan paling nampak Cuma.
Agar fenomena fizikal kelihatan semudah mungkin, kerangka rujukan harus dikaitkan dengan apa yang dipanggil badan bebas.
Percuma(bergerak bebas) badan- ini adalah badan, tidak berinteraksi dengan badan lain, badan dibiarkan sendiri.
Bingkai rujukan yang dikaitkan dengan jasad yang bergerak bebas dipanggil inersia.
Konsep jasad bebas dan kerangka rujukan inersia adalah abstraksi.
Pengalaman menunjukkan bahawa secara semula jadi tidak ada badan yang tidak akan berinteraksi antara satu sama lain dalam satu cara atau yang lain dan akan benar-benar bebas. Oleh itu, secara tegasnya, badan bebas, dan oleh itu tiada kerangka rujukan inersia, tidak wujud. Tetapi terdapat banyak sistem nyata yang mendekati sistem inersia dengan sebarang tahap ketepatan. Sebagai contoh, sistem yang dikaitkan dengan bintang tertentu akan sangat hampir dengan inersia. Sistem yang dikaitkan dengan Bumi akan menjadi kurang inersia (sistem ini bukan inersia kerana ia mengalami pecutan disebabkan oleh putaran harian Bumi mengelilingi paksinya dan pergerakan tahunan mengelilingi Matahari). Walau bagaimanapun, untuk beberapa eksperimen fizikal, ketak-inersiaan sistem "duniawi" boleh diabaikan, kerana ralat yang diperkenalkan dalam kes ini agak kecil.
Terdapat banyak sistem inersia mental. Semua sistem yang berkaitan dengan jasad bebas adalah inersia.
8 Undang-undang pertama Newton
Dinamik adalah berdasarkan tiga undang-undang I. Newton (1642-1727), yang dirumuskan oleh beliau dalam "Prinsip Matematik Falsafah Semula Jadi" (1687). Ketiga-tiga undang-undang digubal untuk sistem rujukan inersia.
1. Dalam hukum pertama kita bercakap tentang tentang pergerakan badan bebas.
Kandungan fizikal undang-undang dinamik pertama telah ditemui oleh G. Galileo (1564 - 1642) jauh sebelum Newton merumuskannya.
Sebelum Galileo, sejak zaman Aristotle (abad IV SM), kepercayaan yang lazim dalam fizik adalah seragam itu. gerakan lurus disokong dengan kekerasan. Dalam Metafizik Aristotle kita membaca: "Badan yang bergerak berhenti sebaik sahaja daya yang menolaknya berhenti bertindak."
Mayat itu disifatkan sebagai sesuatu yang tertentu dorongan dalaman untuk berhenti.
Galileo adalah orang pertama yang dengan tegas menolak idea-idea yang salah ini. Dia sampai pada kesimpulan bahawa dalam keadaan sebenar "kecenderungan" badan untuk berhenti bukan disebabkan oleh sifat dalaman mereka, tetapi oleh sifat sekunder, luaran sebab.
Galileo menyedari bahawa dalam keadaan sebenar daya diperlukan bukan untuk mengekalkan gerakan linear seragam, tetapi untuk memberi pampasan pengaruh luaran yang sedia ada, terutamanya daya geseran, yang biasanya merupakan sebab utama untuk menghentikan pergerakan. Galileo yakin daripada pengalaman bahawa jika daya geseran dikurangkan secara beransur-ansur (sehingga had tertentu, ini boleh dicapai cara teknikal- pemprosesan permukaan gelongsor, pemilihan bahan yang sesuai, pelincir, dsb.), kemudian pergerakan, i.e. kelajuan badan akan berubah semakin perlahan.
Melangkah lebih jauh di sepanjang jalan ini secara mental, mengabstrakkan daripada keadaan sebenar, Galileo membuat kesimpulan bahawa jika tiada pengaruh luaran, gerakan badan harus kekal tidak berubah selama yang dikehendaki, i.e. macam-macam jasad bebas mesti bergerak secara seragam dan lurus (atau berada dalam keadaan rehat).
Pergerakan yang dilakukan oleh badan ketiadaan pengaruh luar , dipanggil inersia, dan prinsip gerakan inersia itu sendiri ialah hukum inersia.
Pergerakan inersia berlaku dengan sendirinya, ia adalah keadaan semula jadi yang penting bagi mana-mana badan material yang bebas daripada pengaruh luaran dan tidak memerlukan sebarang "enjin" luaran sama sekali.
terhadap, gerakan bukan inersia(pergerakan tidak sekata, dipercepatkan) selalu berlaku hanya apabila ketersediaan berterusan pengaruh luar. Gerakan bukan inersia serta-merta bertukar menjadi gerakan inersia sebaik sahaja pengaruh daya hilang. Ini bermakna jika pada masa ini kuasa-kuasa berhenti bertindak, badan dalam keadaan rehat, maka ia akan kekal dalam keadaan ini pada masa hadapan, tetapi jika badan itu bergerak, maka pada masa akan datang ia akan mengekalkan magnitud dan arah kelajuan yang ada pada masa ini kuasa-kuasa itu hilang.
Oleh itu, undang-undang pertama dinamik menyatakan bahawa dalam kerangka rujukan inersia macam-macam badan bebas menyelamatkan negeri
rehat atau rectilinear seragam pergerakan sehingga pengaruh luar memaksanya mengubah keadaan ini.
2. Semua yang disebutkan di atas memerlukan sejumlah pemikiran abstrak. Hakikatnya ialah secara langsung daripada pengalaman kita tidak dapat membuktikan atau menyangkal undang-undang dinamik yang pertama. Pergerakan inersia ialah kes pergerakan yang ideal dan mengehadkan.
3. Dalam keadaan sebenar, kita hampir boleh mengimbangi sepenuhnya pengaruh luar dan memerhatikan gerakan rectilinear yang hampir seragam. Oleh itu, dengan mengimbangi daya geseran yang bertindak pada kereta api dengan daya tarikan lokomotif elektrik, kita boleh menjadikannya bergerak hampir seragam dan dalam garis lurus. Bermakna , dalam keadaan sebenar, jasad berada dalam keadaan diam atau bergerak secara seragam dan lurus jika jumlah vektor semua daya yang bertindak ke atasnya adalah sama dengan sifar:
atau secara ringkas
 . (8.1)
. (8.1)
4. Hukum pertama Newton hanya sah dalam kerangka rujukan inersia. Ia tidak sukar untuk difahami.
Mari bayangkan dua sistem bergerak secara relatif antara satu sama lain dengan pecutan. Biarkan jasad, bebas daripada pengaruh, bergerak secara seragam dan rectilinear relatif kepada salah satu sistem Memandangkan sistem kedua bergerak relatif kepada yang pertama dengan pecutan, maka jasad relatif kepada sistem kedua ini akan bergerak dengan pecutan.
Untuk membolehkan badan bergerak secara seragam dan lurus tanpa ketiadaan pengaruh luar, adalah perlu sistem rujukan itu sendiri bebas daripada pengaruh. Kami bersetuju untuk memanggil sistem ini inersia.
Oleh kerana undang-undang pertama dinamik dipenuhi hanya dalam sistem inersia rujukan, maka definisi sistem inersia (atau bukan inersia) boleh diberikan dari sudut pemenuhan undang-undang ini.
Rangka rujukan inersia ialah sistem di mana hukum inersia pertama Newton dipenuhi dengan tepat secara mutlak. Dalam erti kata lain, ini adalah sistem relatif kepada badan bebas yang bergerak secara seragam dan rectilinear.
5. Hukum pertama Newton memainkan peranan yang sangat penting dalam mekanik peranan penting dan mempunyai makna yang bebas sepenuhnya, dan bukan akibat mudah dari undang-undang kedua, kerana ia mungkin kelihatan pada pandangan pertama.
Undang-undang ini mengandungi dalil tentang kewujudan kerangka rujukan inersia, idea tentang kehomogenan dan isotropi ruang berbanding sistem rujukan inersia.
Jika badan bebas daripada pengaruh luaran, maka tiada apa yang boleh mengubah kelajuannya berbanding sistem sedemikian. Ruang, sebagai homogen dan isotropik, tidak boleh mengubah kelajuan ini dengan sendirinya.
Pergerakan rectilinear.
Mari kita cari persamaan kinematik bagi satu titik yang bergerak dalam garis lurus. Mari kita halakan paksi OX di sepanjang trajektori gerakan (Gamb. 7). Mari kita pertimbangkan dahulu gerakan seragam v = const. Kemudian anjakan asas (pergerakan dalam tempoh masa yang sangat kecil) akan sama dengan dx = vdx. Biarkan seketika t = 0 titik itu mempunyai koordinat x 0. Maka perubahan dalam koordinat sepanjang masa t adalah sama dengan:

x – x 0 = vt,
x = x 0 + vt.(8)
Tanda tambah sebelum ini x 0 Dan v mereka mengatakan bahawa untuk arah yang dipilih paksi OX dan kedudukan awal titik koordinat x 0 dan unjuran halaju pada paksi OX adalah positif.

Pergerakan rectilinear
Jika kelajuan berubah dari semasa ke semasa, maka pergerakan sedemikian biasanya dipanggil pergerakan dengan pecutan, atau pergerakan dengan kelajuan berubah-ubah. Jika pecutan adalah malar, maka gerakan tersebut biasanya dipanggil pembolehubah seragam:
![]() (9)
(9)
Selain itu, jika vektor halaju dan pecutan adalah selari (seperti dalam Rajah 7), maka pergerakan tersebut biasanya dipanggil dipercepatkan secara seragam: dalam tempoh masa yang sama, kelajuan badan meningkat dengan jumlah yang sama.
Jika vektor halaju dan pecutan adalah antiselari (dalam Rajah 7, vektor ini harus diarahkan dalam sisi bertentangan), maka pergerakan sedemikian biasanya dipanggil sama perlahan: dalam tempoh masa yang sama, kelajuan jasad berkurangan dengan jumlah yang sama.
Menggunakan definisi (9) membolehkan seseorang memperoleh pergantungan kelajuan v dari semasa ke semasa t dengan gerakan seragam. Jadi, memilih paksi koordinat sepanjang arah pergerakan badan (Rajah 7), kita boleh menulis: dv = adt. Jika badan pada masa ini t = 0 badan mempunyai kelajuan v 0, Itu
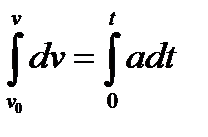 ,
,
v – v 0 = pada.
Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, dengan gerakan seragam jasad dalam garis lurus, kelajuannya berubah mengikut undang-undang:
v = v 0 ± pada. (10)
Tanda tambah dalam formula ini sepadan dengan gerakan dipercepatkan secara seragam, tanda tolak – sama perlahan.
Sekarang mari kita perolehi pergantungan koordinat x badan pada masa t untuk gerakan dipercepatkan secara seragam.
Setelah memilih paksi koordinat OX sepanjang arah pergerakan badan, kita boleh menulis sekali lagi:
dx = vdt = (v 0 ± pada)dt.
Dengan mengandaikan bahawa saat dalam masa t = 0 sepadan dengan koordinat x 0, kita dapat:
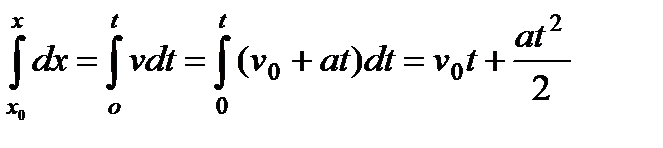 ;
;
 . (11)
. (11)
Tanda (ʼʼplusʼʼ atau ʼʼminusʼʼ) yang manakah harus diletakkan sebelum kelajuan awal v 0 dan pecutan a, bergantung kepada sama ada arah vektor dan arah paksi koordinat OX yang dipilih bertepatan (tanda tambah) atau tidak (tanda tolak).
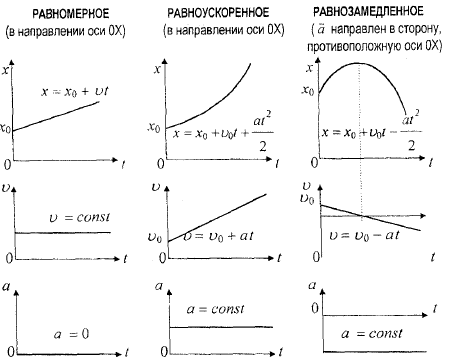
Graf yang menerangkan pergerakan titik dalam garis lurus
Dalam Rajah. Rajah 8 menunjukkan contoh graf kedudukan, halaju dan pecutan lawan masa bagi gerakan seragam, pecutan seragam dan gerakan perlahan seragam.
Selalunya ada gerakan seragam dipanggil hanya dipercepat, bermakna jika kelajuan meningkat, maka pecutan adalah nilai positif, dan jika kelajuan berkurangan, maka pecutan adalah nilai negatif.
Pergerakan rectilinear. - konsep dan jenis. Klasifikasi dan ciri kategori "Pergerakan Rectilinear." 2014, 2015.
Definisi
Pergerakan titik material dipanggil terus terang, jika relatif kepada sistem rujukan yang dipilih, trajektori pergerakan titik adalah garis lurus.
Pergerakan titik material dipertimbangkan seragam, jika dalam tempoh masa yang sama titik membuat pergerakan yang sama.
Mari kita andaikan bahawa titik bergerak secara rectilinear dan seragam di sepanjang paksi X Kemudian koordinat ($x$) titik ialah fungsi linear masa:
di mana $x_0$ - koordinat permulaan titik sepadan dengan permulaan pemerhatian ($x=x_0(t=0)$); $v$ ialah kelajuan titik.
Kelajuan semasa gerakan rectilinear seragam adalah sama dengan nisbah perubahan dalam koordinat titik ($\Delta x=x-x_0$) kepada selang masa ($\Delta t$) perubahan dalam koordinat ini:
Pergerakan seragam dan linear dicirikan oleh vektor halaju malar. Ini bermakna kelajuan titik tidak berubah sama ada dalam magnitud atau arah:
\[\overline(v)=const\ \left(3\right).\]
Dalam kes gerakan rectilinear, laluan ($s$) adalah sama dalam magnitud dengan perubahan dalam koordinat:
Laluan gerakan rectilinear berkaitan dengan kelajuan sebagai:
Satu cara grafik untuk menerangkan gerakan linear seragam
yang paling banyak secara visual penerangan tentang pergerakan ialah kaedah grafik. Graf modulus halaju semasa gerakan rectilinear ditunjukkan dalam Rajah 1. Ia lurus selari dengan paksi masa, kerana kita tahu bahawa magnitud kelajuan tidak berubah semasa gerakan seragam. Luas segi empat tepat ABCD adalah sama dengan magnitud perubahan dalam koordinat titik bergerak semasa pergerakannya.
Dengan gerakan rectilinear seragam, laluan adalah berkadar terus dengan masa pergerakan (5). Ini bermakna graf yang memaparkan pergantungan laluan pada masa ialah garis lurus yang meninggalkan asal koordinat (Rajah 2) di $s_0\left(0\right)=0.\ $Perlu diingat bahawa laluan tidak boleh kurang daripada sifar dan tidak boleh berkurangan dengan pergerakan. Untuk menentukan laluan yang telah dilalui oleh titik dalam tempoh masa yang ditetapkan, lukiskan serenjang dari titik pada paksi $t$, yang sepadan dengan penghujung tempoh masa yang sedang dipertimbangkan, ke titik persilangan dengan graf, kemudian pulihkan serenjang dari titik yang diperoleh pada graf ke paksi s.
Dengan gerakan rectilinear seragam, koordinat ialah fungsi linear masa (1), oleh itu, graf perubahan dalam koordinat berbanding masa ialah garis lurus (Rajah 3).

Daripada graf dalam Rajah 3 kita lihat bahawa dalam detik permulaan koordinat masa bagi titik ialah $x_0\left(t=0\right)=$3m. Pada masa yang sama dengan tiga saat, koordinat titik ialah $x_1\left(t=3\right)=0\ m$ - ini bermakna bahawa badan, pada satu masa bersamaan dengan tiga saat dari permulaan pemerhatian, berada pada asal koordinat. Pada masa yang sama dengan empat saat, titik itu berada pada paksi X pada satu titik dengan koordinat $x_2\left(t=4\right)=-1\ m.\ $Sepanjang masa pergerakannya, titik bergerak melawan paksi X Kelajuan titik sepanjang jumlah pergerakannya adalah sama dengan:
Tanda tolak menunjukkan bahawa kelajuan diarahkan terhadap arah paksi X, modul kelajuan adalah sama dengan tiga meter sesaat. Menggunakan graf koordinat lawan masa, anda boleh mencari kedudukan titik sebelum permulaan pemerhatian jika gerakan zarah tidak berubah. Titik masa sebelum permulaan pemerhatian dianggap negatif. Jadi, berdasarkan graf dalam Rajah. 3 satu saat sebelum permulaan pemerhatian, koordinat titik adalah sama dengan 4 meter.
Mari kita ingat bahawa untuk membina graf yang menerangkan gerakan rectilinear dan seragam, cukup untuk mengetahui koordinat (atau nilai laluan) untuk dua saat dalam masa.
Contoh masalah dengan penyelesaian
Contoh 1
Bersenam. Pergerakan titik material diberikan oleh dua graf laluan lawan masa, Rajah 4. Antara graf yang manakah sepadan dengan kelajuan badan yang lebih besar?
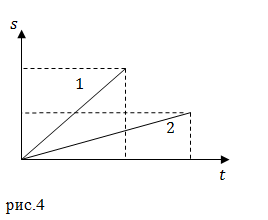
Penyelesaian. Pergerakan rectilinear digambarkan secara analitikal oleh fungsi:
di mana $v$= const. Semakin besar modul halaju, semakin besar sudut yang dibentuk oleh graf $s\left(t\right)$ dengan paksi masa. Akibatnya, untuk graf 1 nilai kelajuan pergerakan adalah lebih besar.
Jawab.$v_2
Contoh 2
Bersenam. Titik bahan bergerak secara seragam dan lurus terhadap paksi Y Kelajuan pergerakan ialah $v=1\ \frac(m)(s)$. Apakah kedudukan titik pada saat masa bersamaan dengan $t=20$ s selepas permulaan pengiraan masa, jika koordinat awal zarah ialah $y_0=15\ $m? Apakah laluan yang dilalui oleh titik itu?
Penyelesaian. 1) Apabila bergerak di sepanjang paksi Y dengan kelajuan tetap kita tulis persamaan untuk koordinat titik dalam bentuk:
di mana tanda tolak bermaksud titik bergerak melawan paksi Y Daripada keadaan masalah kita tahu bahawa $y_0=15\ $m, $v=1\ \frac(m)(s)$, $t=20$ c. kita gantikan nilai yang ditentukan, mari kita hitung koordinat:
2) Dengan gerakan rectilinear seragam, laluan yang dilalui oleh badan dikira sebagai:
Jawab.$y=-5\ m$, $s$=20 m